Probabilistic Forecasts of Sea Ice Trajectories in the Arctic: Impact of Uncertainties in Surface Wind and Ice Cohesion


Abstract
1. Introduction
2. Methodology
3. Experiment Setup
3.1. Ocean and Atmosphere Forcing Fields
3.2. Simulation Setup
3.3. Lagrangian Trajectories
3.4. Air Drag Coefficient Optimization
3.5. Ensemble Experiments by Perturbing Wind/Cohesion Sources
4. Results
4.1. Comparison of the Simulated Sea Ice Trajectories against the IABP Dataset
4.2. Assessment of Model Sensitivity
5. Discussion
6. Conclusions and Perspectives
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Comiso, J.C.; Parkinson, C.L.; Gersten, R.; Stock, L. Accelerated decline in the Arctic sea ice cover. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef]
- Rosenblum, E.; Eisenman, I. Sea ice trends in climate models only accurate in runs with biased global warming. J. Clim. 2017, 30, 6265–6278. [Google Scholar] [CrossRef]
- Stroeve, J.; Notz, D. Changing state of Arctic sea ice across all seasons. Environ. Res. Lett. 2018, 13. [Google Scholar] [CrossRef]
- Vihma, T.; Pirazzini, R.; Fer, I.; Renfrew, I.A.; Sedlar, J.; Tjernström, M.; Lüpkes, C.; Nygård, T.; Notz, D.; Weiss, J.; et al. Advances in understanding and parameterization of small-scale physical processes in the marine Arctic climate system: A review. Atmos. Chem. Phys. 2014, 14, 9403–9450. [Google Scholar] [CrossRef]
- Blockley, E.; Vancoppenolle, M.; Hunke, E.; Bitz, C.; Feltham, D.; Lemieux, J.-F.; Losch, M.; Maisonnave, E.; Notz, D.; Rampal, P. The future of sea ice modelling: Where do we go from here? Bull. Am. Meteorol. Soc. 2020. [Google Scholar] [CrossRef]
- Pizzolato, L.; Howell, S.E.L.; Derksen, C.; Dawson, J.; Copland, L. Changing sea ice conditions and marine transportation activity in Canadian Arctic waters between 1990 and 2012. Clim. Chang. 2014, 123, 161–173. [Google Scholar] [CrossRef]
- Hibler, W.D. A dynamic thermodynamic sea ice model. J. Phys. Oceanogr. 1979, 9, 815–846. [Google Scholar] [CrossRef]
- Wilchinsky, A.V.; Feltham, D.L.; Miller, P.A. A multithickness sea ice model accounting for sliding friction. J. Phys. Oceanogr. 2006, 36, 1719–1738. [Google Scholar] [CrossRef][Green Version]
- Tsamados, M.; Feltham, D.L.; Wilchinsky, A.V. Impact of a new anisotropic rheology on simulations of Arctic sea ice. J. Geophys. Res. Ocean. 2013, 118, 91–107. [Google Scholar] [CrossRef]
- Girard, L.; Bouillon, S.; Weiss, J.; Amitrano, D.; Fichefet, T.; Legat, V. A new modeling framework for sea-ice mechanics based on elasto-brittle rheology. Ann. Glaciol. 2011, 52, 123–132. [Google Scholar] [CrossRef]
- Dansereau, V.; Weiss, J.; Saramito, P.; Lattes, P. A Maxwell elasto-brittle rheology for sea ice modelling. Cryosphere 2016, 10, 1339–1359. [Google Scholar] [CrossRef]
- Rampal, P.; Dansereau, V.; Olason, E.; Bouillon, S.; Williams, T.; Korosov, A.; Samaké, A. On the multi-fractal scaling properties of sea ice deformation. Cryosphere 2019, 13. [Google Scholar] [CrossRef]
- Rampal, P.; Bouillon, S.; Ólason, E.; Morlighem, M. neXtSIM: A new Lagrangian sea ice model. Cryosphere 2016, 10, 1055–1073. [Google Scholar] [CrossRef]
- Rampal, P.; Bouillon, S.; Bergh, J.; Ólason, E. Arctic sea-ice diffusion from observed and simulated Lagrangian trajectories. Cryosphere 2016, 10, 1513–1527. [Google Scholar] [CrossRef]
- Marsan, D.; Stern, H.; Lindsay, R.; Weiss, J. Scale dependence and localization of the deformation of Arctic sea ice. Phys. Rev. Lett. 2004, 93, 178501. [Google Scholar] [CrossRef]
- Thorndike, A.S.; Colony, R. Sea ice motion in response to geostrophic winds. J. Geophys. Res. 1982, 87. [Google Scholar] [CrossRef]
- Rabatel, M.; Rampal, P.; Carrassi, A.; Bertino, L.; Jones, C.K.R.T. Impact of rheology on probabilistic forecasts of sea ice trajectories: Application for search and rescue operations in the Arctic. Cryosphere 2018, 12, 935–953. [Google Scholar] [CrossRef]
- Röhrs, J.; Kaleschke, L. An algorithm to detect sea ice leads by using AMSR-E passive microwave imagery. Cryosphere 2012, 6, 343. [Google Scholar] [CrossRef]
- Schulson, E.M. Fracture of ice and other coulombic materials. In Mechanics of Natural Solids; Springer: Berlin/Heidelberg, Germany, 2009; pp. 177–202. [Google Scholar]
- Bouillon, S.; Rampal, P. Presentation of the dynamical core of neXtSIM, a new sea ice model. Ocean Model. 2015, 91, 23–37. [Google Scholar] [CrossRef]
- Schulson, E.; Fortt, A.; Iliescu, D.; Renshaw, C. Failure envelope of first-year Arctic sea ice: The role of friction in compressive fracture. J. Geophys. Res. Ocean. 2006, 111. [Google Scholar] [CrossRef]
- Weiss, J.; Schulson, E.M. Coulombic faulting from the grain scale to the geophysical scale: Lessons from ice. J. Phys. D Appl. Phys. 2009, 42, 214017. [Google Scholar] [CrossRef]
- Sakov, P.; Counillon, F.; Bertino, L.; Lisæter, K.A.; Oke, P.R.; Korablev, A. TOPAZ4: An ocean-sea ice data assimilation system for the North Atlantic and Arctic. Ocean Sci. 2012, 8, 633–656. [Google Scholar] [CrossRef]
- Evensen, G. The ensemble kalman filter: Theoretical formulation and practical implementation. Ocean Dyn. 2003, 53, 343–367. [Google Scholar] [CrossRef]
- Bromwich, D.; Bai, L.; Hines, K.; Wang, S.; Liu, Z.; Lin, H.; Kuo, Y.; Barlage, M. Arctic System Reanalysis (ASR) Project. Res. Data Arch. Natl. Cent. Atmos. Res. Comput. Inf. Syst. Lab. 2012. [Google Scholar] [CrossRef]
- Williams, T.; Korosov, A.; Rampal, P.; Ólason, E. Presentation and evaluation of the Arctic sea ice forecasting system neXtSIM-F. Cryosphere Discuss. 2019. [Google Scholar] [CrossRef]
- Samaké, A.; Rampal, P.; Bouillon, S.; Ólason, E. Parallel implementation of a Lagrangian-based model on an adaptive mesh in C++: Application to sea-ice. J. Comput. Phys. 2017, 350, 84–96. [Google Scholar] [CrossRef]
- Lavergne, T.; Eastwood, S. Low Resolution Sea Ice Drift Product User’s Manual; The EUMETSAT Network of Satellite Application Facility on Ocean & Sea Ice SAF: Darmstadt, Germany, 2015. [Google Scholar]
- Lavergne, T.; Eastwood, S.; Teffah, Z.; Schyberg, H.; Breivik, L. Sea ice motion from low-resolution satellite sensors: An alternative method and its validation in the Arctic. J. Geophys. Res. 2010, 115. [Google Scholar] [CrossRef]
- Rampal, P.; Weiss, J.; Marsan, D.; Lindsay, R.; Stern, H. Scaling properties of sea ice deformation from buoy dispersion analysis. J. Geophys. Res. 2008, 113. [Google Scholar] [CrossRef]
- Kern, S.; Bell, L.; Ivanova, N.; Beitsch, A.; Pedersen, L.T.; Saldo, R.; Sandven, S. Evaluation of the ESA Sea Ice CCI (SICCI) project sea ice concentration data set. In Proceedings of the ESA Living Planet Symposium, Prague, Czech Republic, 9–13 May 2016. [Google Scholar]
- Ricker, R.; Hendricks, S.; Kaleschke, L.; Tian-Kunze, X.; King, J.; Haas, C. A weekly Arctic sea-ice thickness data record from merged CryoSat-2 and SMOS satellite data. Cryosphere 2017, 11, 1607–1623. [Google Scholar] [CrossRef]
- Xie, J.; Bertino, L.; Counillon, F.; Lisæter, K.A.; Sakov, P. Quality assessment of the TOPAZ4 reanalysis in the Arctic over the period 1991–2013. Ocean Sci. 2017, 13, 123–144. [Google Scholar] [CrossRef]
- Carrassi, A.; Bocquet, M.; Bertino, L.; Evensen, G. Data assimilation in the geosciences: An overview of methods, issues, and perspectives. Wiley Interdiscip. Rev. Clim. Chang. 2018, 9. [Google Scholar] [CrossRef]
- Aydoğdu, A.; Carrassi, A.; Guider, C.T.; Jones, C.K.R.T.; Rampal, P. Data assimilation using adaptive, non-conservative, moving mesh models. Nonlinear Process. Geophys. 2019, 26, 175–193. [Google Scholar] [CrossRef]
- Sampson, C.; Carrassi, A.; Aydoğdu, A.; Jones, C.K.T. Ensemble Kalman Filter for non-conservative moving mesh solvers with a joint physics and mesh location update. (under review). arXiv 2020, arXiv:2009.13670. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ensemble Acronym | WIND | COHESION | JOINT |
|---|---|---|---|
| Ensemble generation | Perturbation of winds using random wind fields | Perturbation of ice cohesion initialized from a random uniform distribution | Joint winds perturbation and ice cohesion perturbation |
| Ensemble size | 20 | 20 | 20 |
| Initial dates (DD-MM-2008) of each 10-day forecast | 01-01, 10-01, 19-01, 28-01, 06-02, 15-02, 24-02, 04-03, 13-03, 22-03, 31-03, 09-04, 18-04 | ||
| Atmospheric forcing | ASR reanalysis | ||
| Oceanic forcing | TOPAZ4 reanalysis | ||
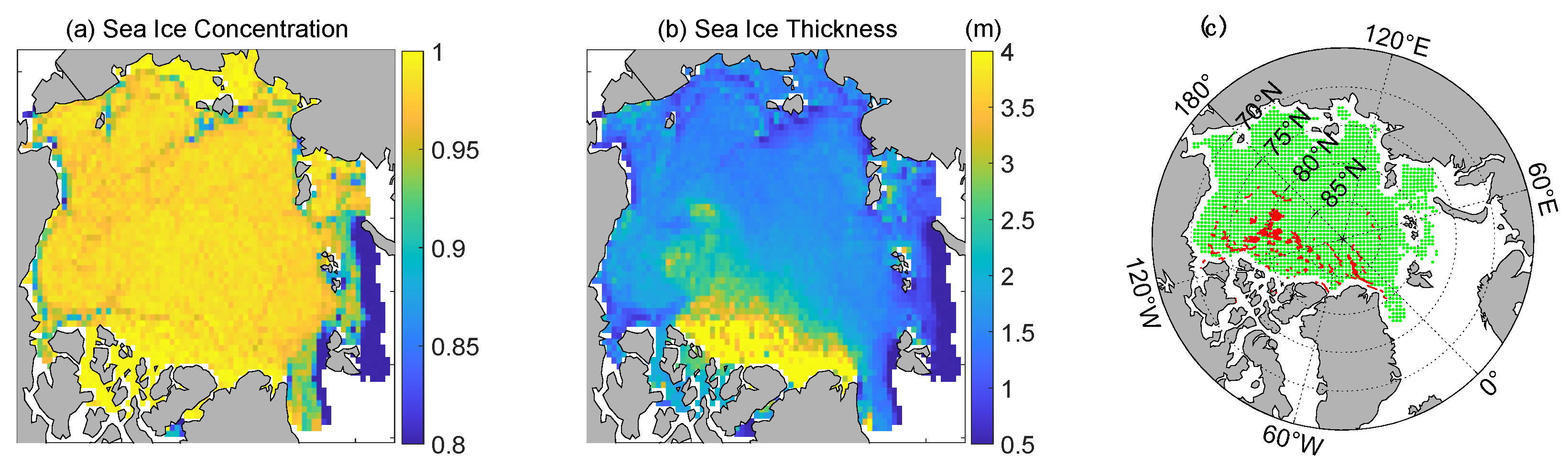
| Initial sea ice thickness and concentration | |||
| Symbol | Name | Value | Unit |
|---|---|---|---|
| Air density | 1.3 | kg/m3 | |
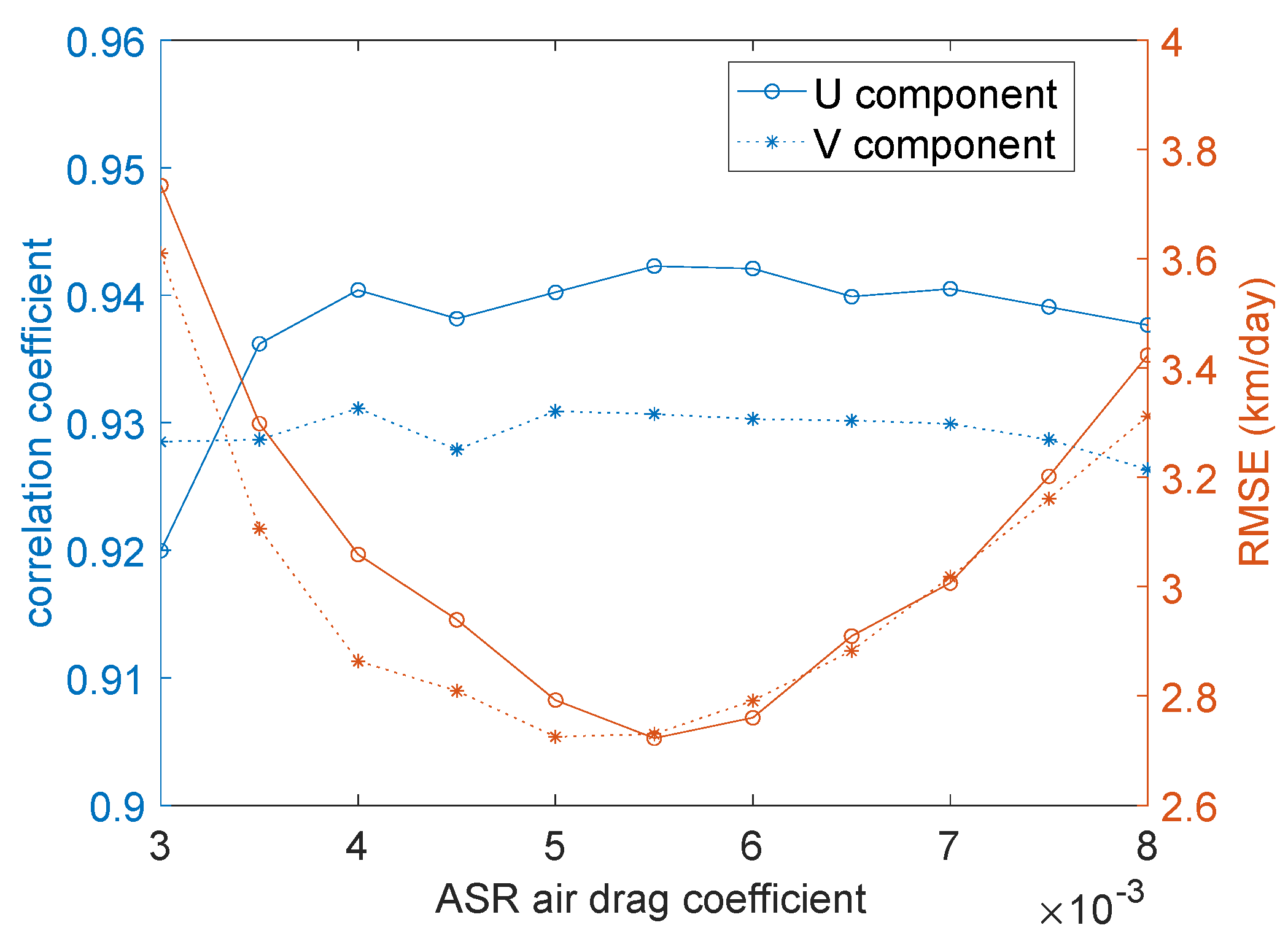
| Air drag coefficient | 0.0055 | - | |
| Air turning angle | 0 | degree | |
| Water density | 1025 | kg/m3 | |
| Water drag coefficient | 0.0055 | - | |
| Water turning angle | 25 | degree | |
| Ice density | 917 | kg/m3 | |
| Snow density | 330 | kg/m3 | |
| Poisson ratio | 0.3 | - | |
| Internal friction coefficient | 0.7 | - | |
| Elastic modulus | 596 | MPa | |
| Nominal mesh resolution | 7.5 | km | |
| Time step | 200 | s | |
| Characteristic time for damaging | 20 | s | |
| Undamaged relaxation time | 107 | s | |
| Compactness parameter | −20 | - |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, S.; Aydoğdu, A.; Rampal, P.; Carrassi, A.; Bertino, L. Probabilistic Forecasts of Sea Ice Trajectories in the Arctic: Impact of Uncertainties in Surface Wind and Ice Cohesion. Oceans 2020, 1, 326-342. https://doi.org/10.3390/oceans1040022
Cheng S, Aydoğdu A, Rampal P, Carrassi A, Bertino L. Probabilistic Forecasts of Sea Ice Trajectories in the Arctic: Impact of Uncertainties in Surface Wind and Ice Cohesion. Oceans. 2020; 1(4):326-342. https://doi.org/10.3390/oceans1040022
Chicago/Turabian StyleCheng, Sukun, Ali Aydoğdu, Pierre Rampal, Alberto Carrassi, and Laurent Bertino. 2020. "Probabilistic Forecasts of Sea Ice Trajectories in the Arctic: Impact of Uncertainties in Surface Wind and Ice Cohesion" Oceans 1, no. 4: 326-342. https://doi.org/10.3390/oceans1040022
APA StyleCheng, S., Aydoğdu, A., Rampal, P., Carrassi, A., & Bertino, L. (2020). Probabilistic Forecasts of Sea Ice Trajectories in the Arctic: Impact of Uncertainties in Surface Wind and Ice Cohesion. Oceans, 1(4), 326-342. https://doi.org/10.3390/oceans1040022