
Conceptualization of a Sensory Feedback System in an Anthropomorphic Replacement Hand




Abstract
:1. Introduction
2. Results
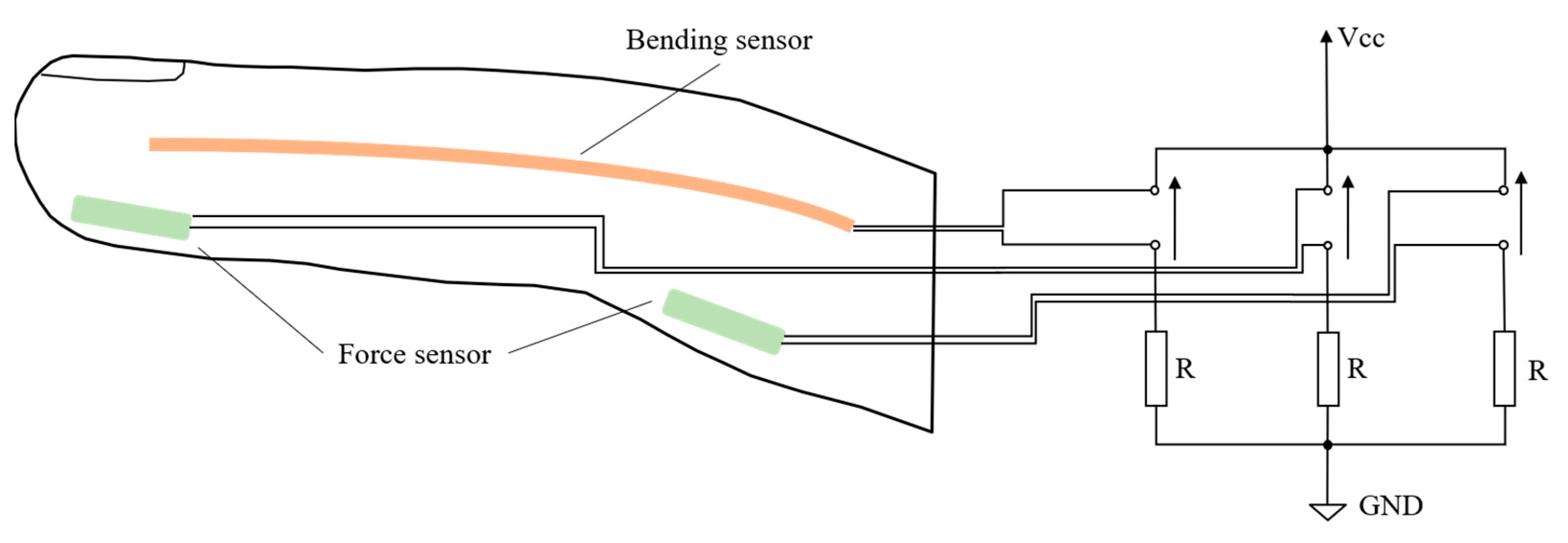
2.1. Finger Test Series for Sensor Attachment
2.2. Test Series for Combining Silicones with Different Shore Hardnesses during Casting
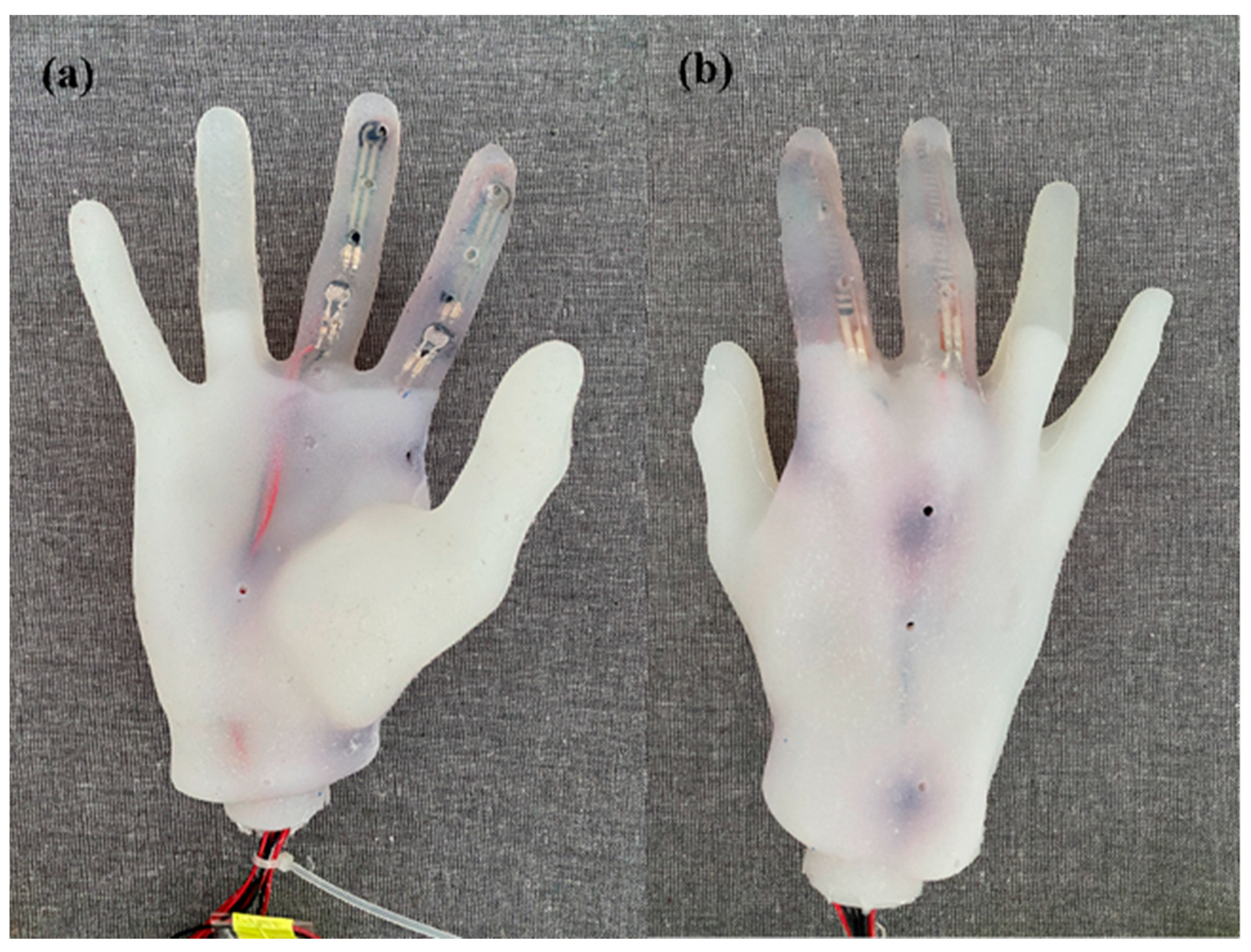
2.3. Replacement Hands
2.4. Evaluating the Sensory Feedback
3. Discussion
4. Materials and Methods
4.1. Test Series to Evaluate Sensor Attachment
4.2. Test Series for Combining Silicones with Different Shore Hardnesses during Casting
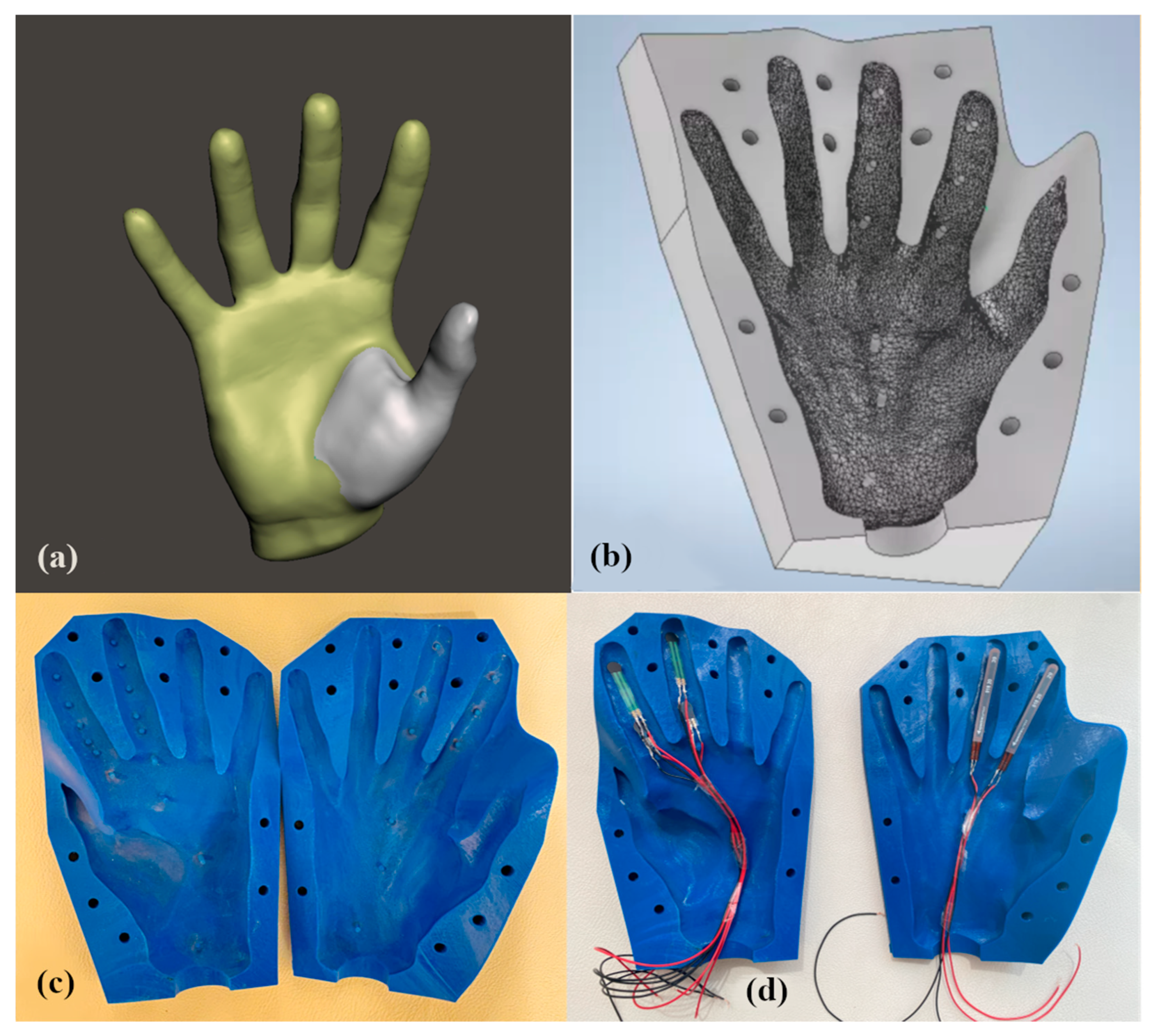
4.3. Manufacturing Process of a Silicone Replacement Hand, Including Pressure and Bending Sensors
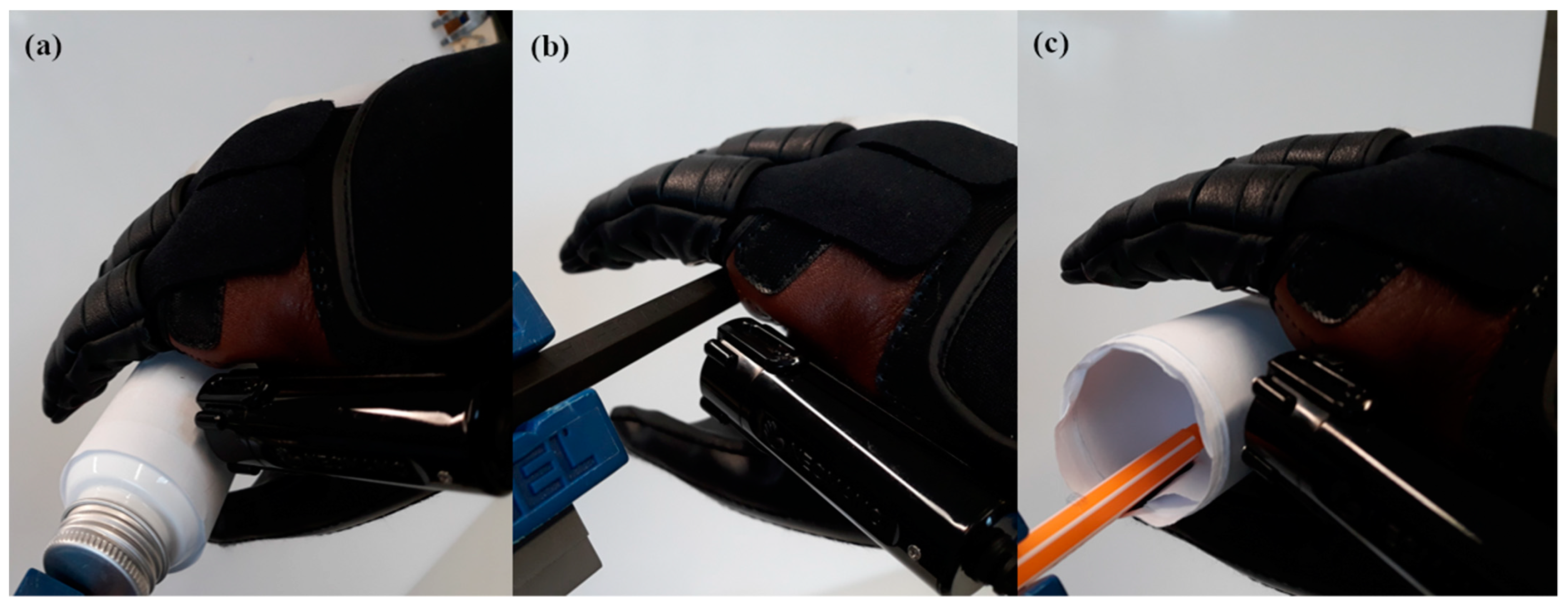
4.4. Evaluating Sensory Feedback System
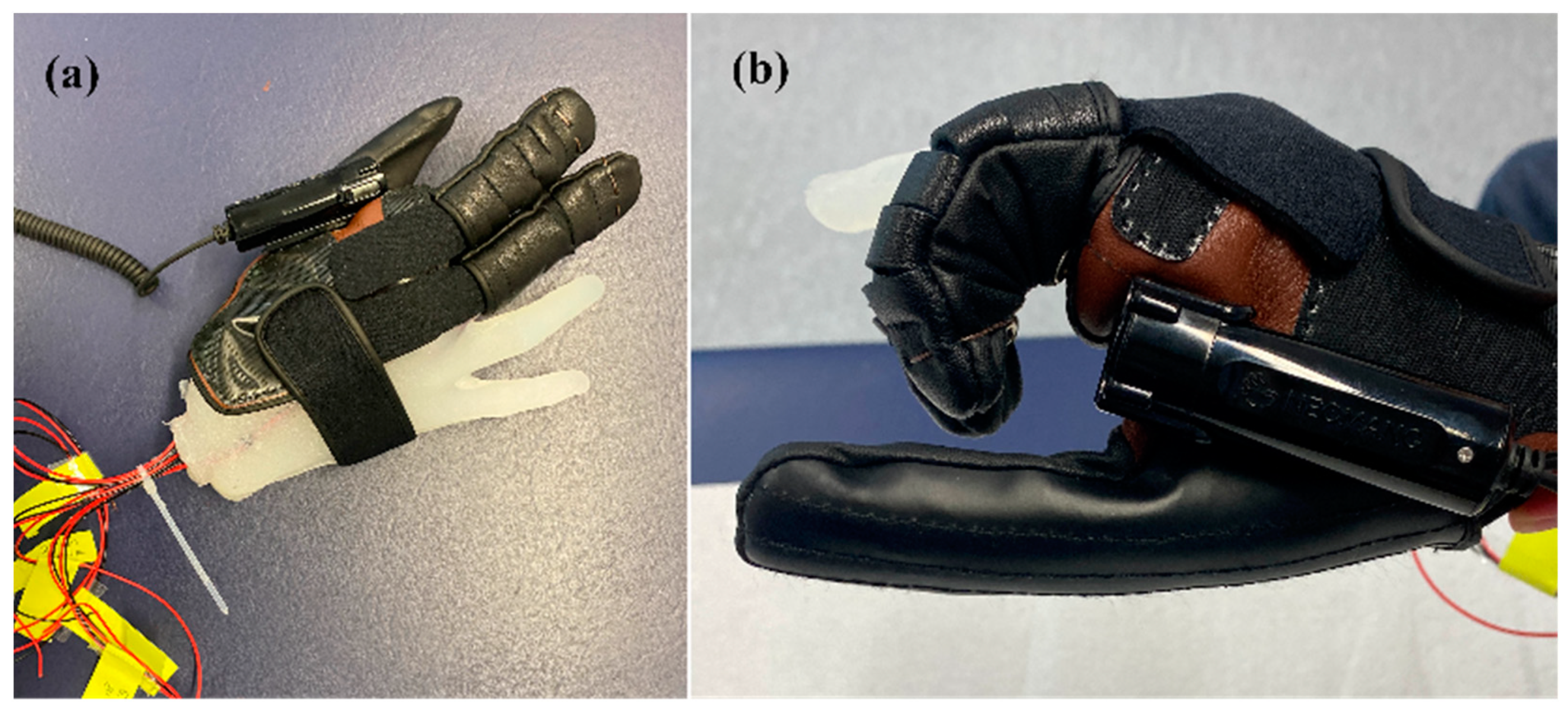
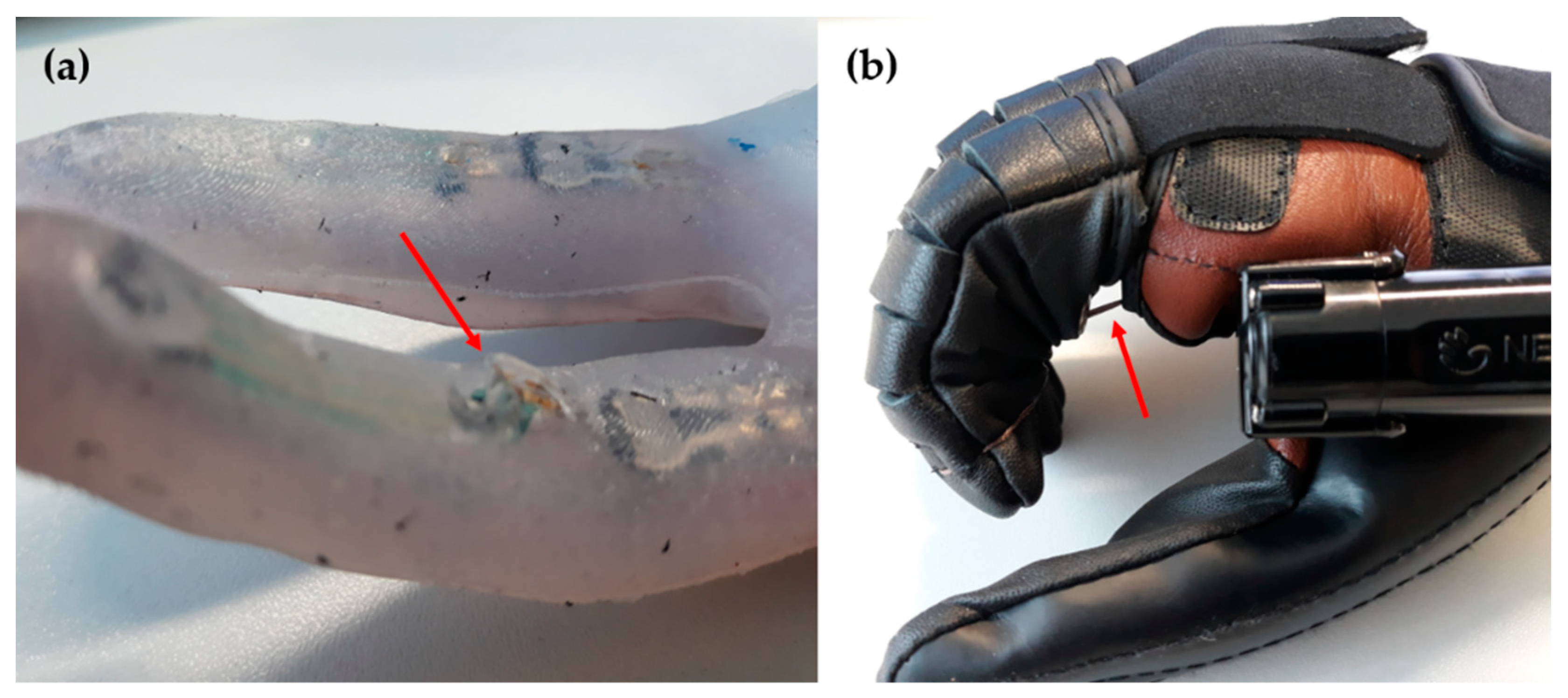
4.5. Evaluating Sensory Feedback System Using Neofect Orthosis
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pylatiuk, C.; Schulz, S.; Döderlein, L. Results of an Internet survey of myoelectric prosthetic hand users. Prosthet. Orthot. Int. 2007, 31, 362–370. [Google Scholar] [CrossRef] [PubMed]
- Kim, J.; Lee, M.; Shim, H.J.; Ghaffari, R.; Cho, H.R.; Son, D.; Jung, Y.H.; Soh, M.; Choi, C.; Jung, S.; et al. Stretchable silicon nanoribbon electronics for skin prosthesis. Nat. Commun. 2014, 5, 5747. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stephens-Fripp, B.; Alici, G.; Mutlu, R. A Review of Non-Invasive Sensory Feedback Methods for Transradial Prosthetic Hands. IEEE Access 2018, 6, 6878–6899. [Google Scholar] [CrossRef]
- Clemente, F.; D’Alonzo, M.; Controzzi, M.; Edin, B.B.; Cipriani, C. Non-Invasive, Temporally Discrete Feedback of Object Contact and Release Improves Grasp Control of Closed-Loop Myoelectric Transradial Prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2016, 24, 1314–1322. [Google Scholar] [CrossRef] [PubMed]
- Raveh, E.; Portnoy, S.; Friedman, J. Myoelectric Prosthesis Users Improve Performance Time and Accuracy Using Vibrotactile Feedback When Visual Feedback Is Disturbed. Arch. Phys. Med. Rehabil. 2018, 99, 2263–2270. [Google Scholar] [CrossRef] [PubMed]
- Saunders, I.; Vijayakumar, S. The role of feed-forward and feedback processes for closed-loop prosthesis control. J. Neuroeng. Rehabil. 2011, 8, 60. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nolden, R.; Zöll, K.; Schwarz-Pfeiffer, A. Smart Glove with an Arduino-Controlled Textile Bending Sensor, Textile Data Conductors and Feedback Using LED-FSDsTM and Embroidery Technology. Proceedings 2021, 68, 4. [Google Scholar] [CrossRef]
- Engeberg, E.D.; Meek, S. Enhanced visual feedback for slip prevention with a prosthetic hand. Prosthet. Orthot. Int. 2012, 36, 423–429. [Google Scholar] [CrossRef] [PubMed]
- Christ, O.; Wojtusch, J.; Beckerle, P.; Wolff, K.; Vogt, J.; Von Stryk, O.; Rinderknecht, S. Prosthesis-user-in-the-loop: User-centered design parameters and visual simulation. In Proceedings of the 2012 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, San Diego, CA, USA, 28 August–1 September 2012; Volume 2012, pp. 1929–1932. [Google Scholar]
- De Nunzio, A.M.; Dosen, S.; Lemling, S.; Markovic, M.; Schweisfurth, M.A.; Ge, N.; Graimann, B.; Falla, D.; Farina, D. Tactile feedback is an effective instrument for the training of grasping with a prosthesis at low- and medium-force levels. Exp. Brain Res. 2017, 235, 2547–2559. [Google Scholar] [CrossRef] [PubMed]
- Kristoffersen, M.B.; Franzke, A.W.; van der Sluis, C.K.; Murgia, A.; Bongers, R.M. The Effect of Feedback During Training Sessions on Learning Pattern-Recognition-Based Prosthesis Control. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 2087–2096. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ninu, A.; Dosen, S.; Muceli, S.; Rattay, F.; Dietl, H.; Farina, D. Closed-Loop Control of Grasping with a Myoelectric Hand Prosthesis: Which Are the Relevant Feedback Variables for Force Control? IEEE Trans. Neural Syst. Rehabil. Eng. 2014, 22, 1041–1052. [Google Scholar] [CrossRef] [PubMed]
- Alvial, P.; Bravo, G.; Bustos, M.P.; Moreno, G.; Alfaro, R.; Cancino, R.; Zagal, J.C. Quantitative functional evaluation of a 3D–printed silicone-embedded prosthesis for partial hand amputation: A case report. J. Hand Ther. 2018, 31, 129–136. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ribeiro, D.; Cimino, S.R.; Mayo, A.L.; Ratto, M.; Hitzig, S.L. 3D printing and amputation: A scoping review. Disabil. Rehabil. Assist. Technol. 2021, 16, 221–240. [Google Scholar] [CrossRef] [PubMed]
- Bamerni, D. Konzeptionierung eines sensorischen Feedbacksystems bei einer anthropomorphen Ersatzhand. Master’s Thesis, Offenburg University, Offenburg, Germany, 2021. [Google Scholar]
- Baron, J.; Hazubski, S.; Otte, A. 3D Multi-Material Printing of an Anthropomorphic, Personalized Replacement Hand for Use in Neuroprosthetics Using 3D Scanning and Computer-Aided Design: First Proof-of-Technical-Concept Study. Prosthesis 2020, 2, 362–370. [Google Scholar] [CrossRef]
- Zhou, L.-Y.; Gao, Q.; Fu, J.-Z.; Chen, Q.-Y.; Zhu, J.-P.; Sun, Y.; He, Y. Multimaterial 3D Printing of Highly Stretchable Silicone Elastomers. ACS Appl. Mater. Interfaces 2019, 11, 23573–23583. [Google Scholar] [CrossRef] [PubMed]
- Clemente, F.; Dosen, S.; Lonini, L.; Markovic, M.; Farina, D.; Cipriani, C. Humans Can Integrate Augmented Reality Feedback in Their Sensorimotor Control of a Robotic Hand. IEEE Trans. Hum.-Mach. Syst. 2017, 47, 583–589. [Google Scholar] [CrossRef]
- Hazubski, S.; Hoppe, H.; Otte, A. Electrode-free visual prosthesis/exoskeleton control using augmented reality glasses in a first proof-of-technical-concept study. Sci. Rep. 2020, 10, 1–10. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Finger | Measurement | Sensor Mounting |
|---|---|---|
| I | Flexion | Wire |
| II | - | - |
| III | Flexion | Bar |
| IV | Pressure | Bar |
| V | Pressure and Flexion | Bar |
| Finger | Shore-A-Value of the First Part | Time in Minutes until the Second Material Is Filled in | Shore-A-Value of the Second Part |
|---|---|---|---|
| 1 | 00 | 0 | 10 |
| 2 | 00 | 10 | 10 |
| 3 | 00 | 10 | 10 |
| 4 | 00 | 20 | 10 |
| 5 | 00 | 20 | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hazubski, S.; Bamerni, D.; Otte, A. Conceptualization of a Sensory Feedback System in an Anthropomorphic Replacement Hand. Prosthesis 2021, 3, 415-427. https://doi.org/10.3390/prosthesis3040037
Hazubski S, Bamerni D, Otte A. Conceptualization of a Sensory Feedback System in an Anthropomorphic Replacement Hand. Prosthesis. 2021; 3(4):415-427. https://doi.org/10.3390/prosthesis3040037
Chicago/Turabian StyleHazubski, Simon, Derya Bamerni, and Andreas Otte. 2021. "Conceptualization of a Sensory Feedback System in an Anthropomorphic Replacement Hand" Prosthesis 3, no. 4: 415-427. https://doi.org/10.3390/prosthesis3040037
APA StyleHazubski, S., Bamerni, D., & Otte, A. (2021). Conceptualization of a Sensory Feedback System in an Anthropomorphic Replacement Hand. Prosthesis, 3(4), 415-427. https://doi.org/10.3390/prosthesis3040037