Information Geometric Perspective on Off-Resonance Effects in Driven Two-Level Quantum Systems



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (i)
- What are the main effects of deviations from the on-resonance condition in these time-dependent Hamiltonian evolutions?
- (ii)
- Do off-resonance effects modify (with respect to the on-resonance scenario) the relative ranking in terms of performance (quantified in terms of geodesic speed and/or minimum transfer time) among the driving schemes being considered?
- (iii)
- Are there driving schemes that are especially robust against deviations from the on-resonance condition and that, in addition, are capable of reaching sufficiently high fidelity values?
2. The su; Quantum Driving
3. Information Geometric Analysis
3.1. Preliminaries
3.2. Geodesic Paths
3.2.1. Constant Behavior
3.2.2. Oscillatory Behavior
3.2.3. Power Law Decay
3.2.4. Exponential Decay
3.3. Geodesic Speeds
3.3.1. Constant Case
3.3.2. Oscillatory Behavior
3.3.3. Power Law Decay
3.3.4. Exponential Decay
4. Conclusions
- (1)
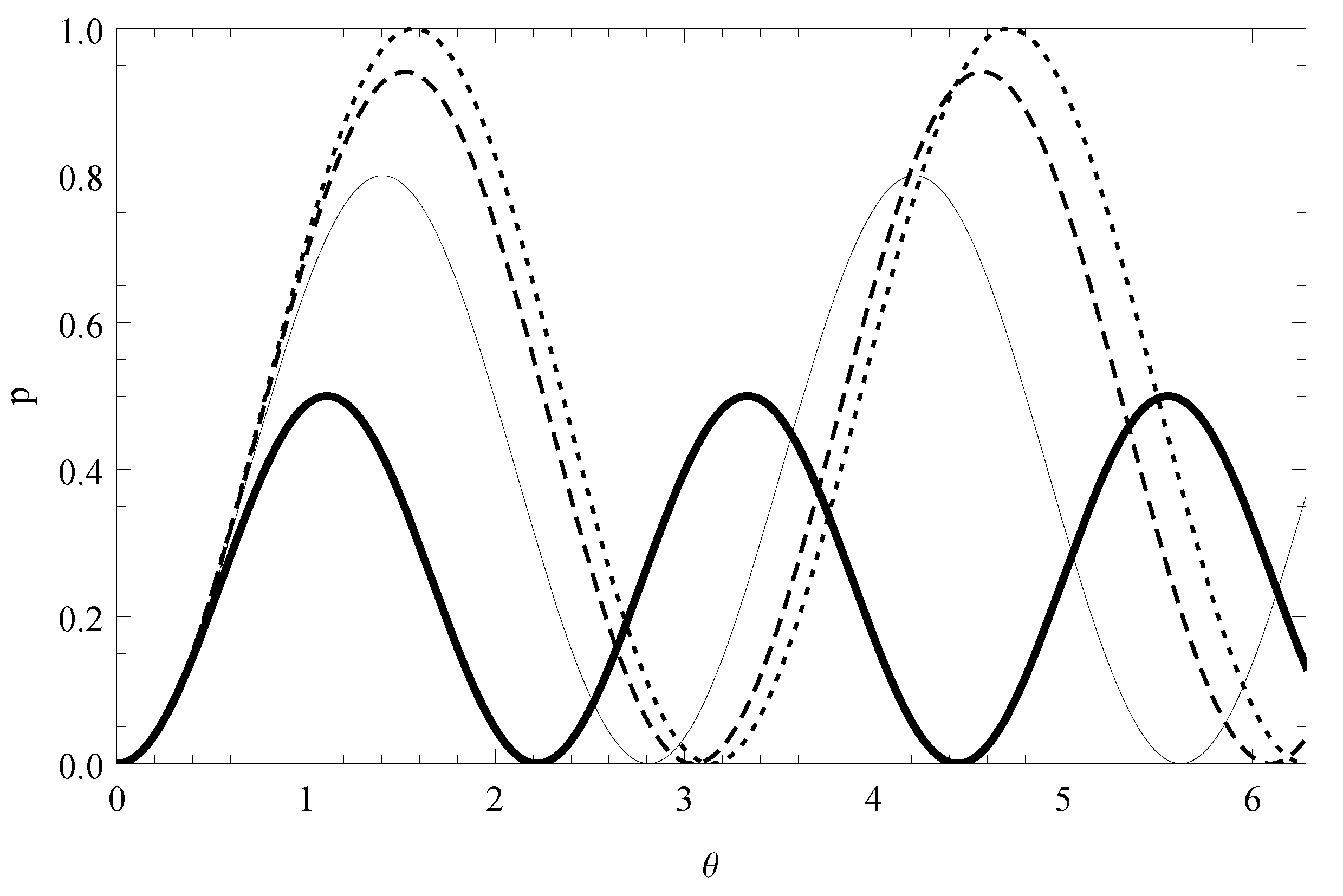
- In the presence of off-resonance effects, the success probability of the various quantum strategies is affected both in terms of amplitude and periodicity. In particular, focusing on the constant driving case, the success probability in Equation (42) is dampened by the Lorentzian-like factor . Moreover, the periodicity of the oscillations of this probability changes from to . In summary, oscillations become smaller in amplitude but higher in frequency. These facts are clearly visible in Figure 1.
- (2)
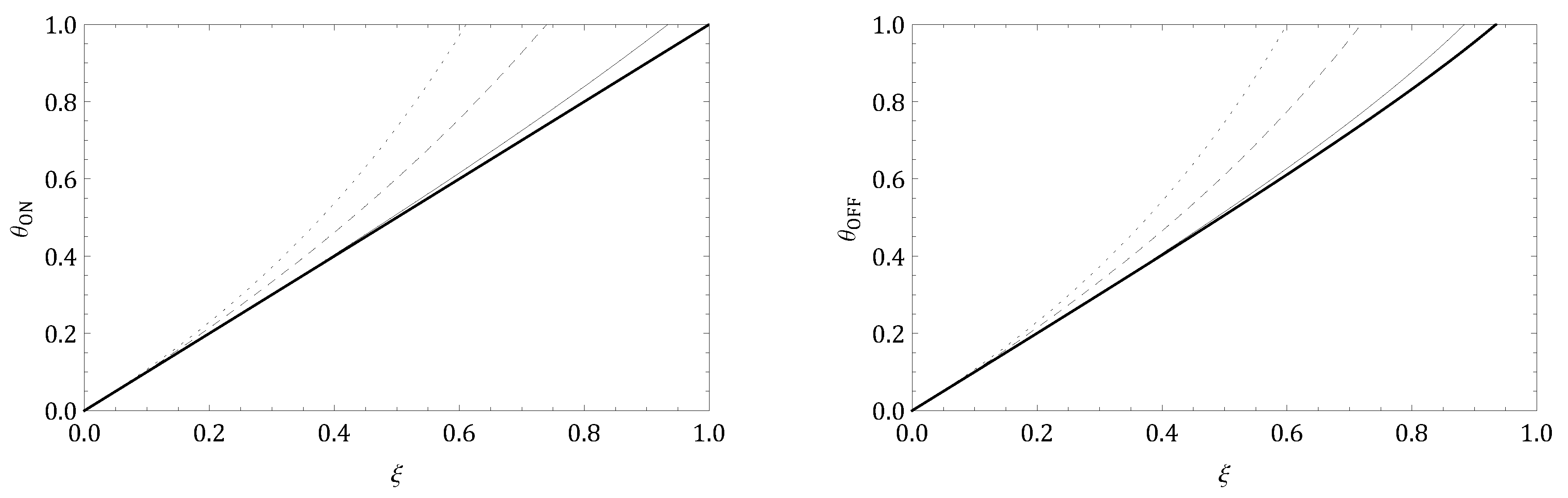
- Departing from the on-resonance condition (that is, ), we observe a change in the geodesic paths on the underlying manifolds. The presence of off-resonance effects (that is, ) generates geodesic paths with a more complex structure. In particular, unlike what happens when the on-resonance condition is satisfied, numerical integration of the geodesic equations is required. In particular, the numerical plots of the geodesic paths versus the affine parameter for the four driving strategies with geodesic equations in Equations (46), (53), (60) and (67) appear in Figure 2.
- (3)
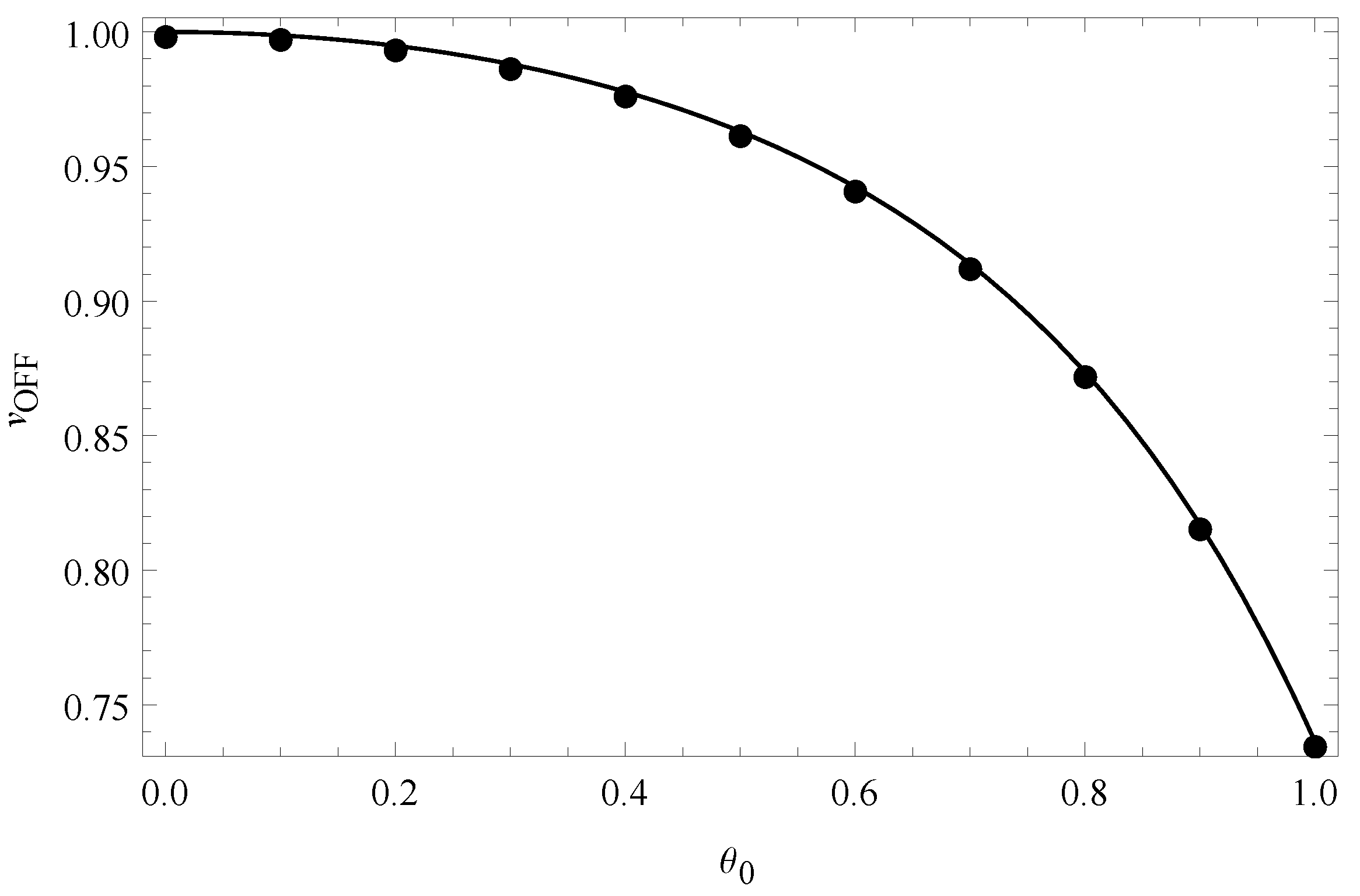
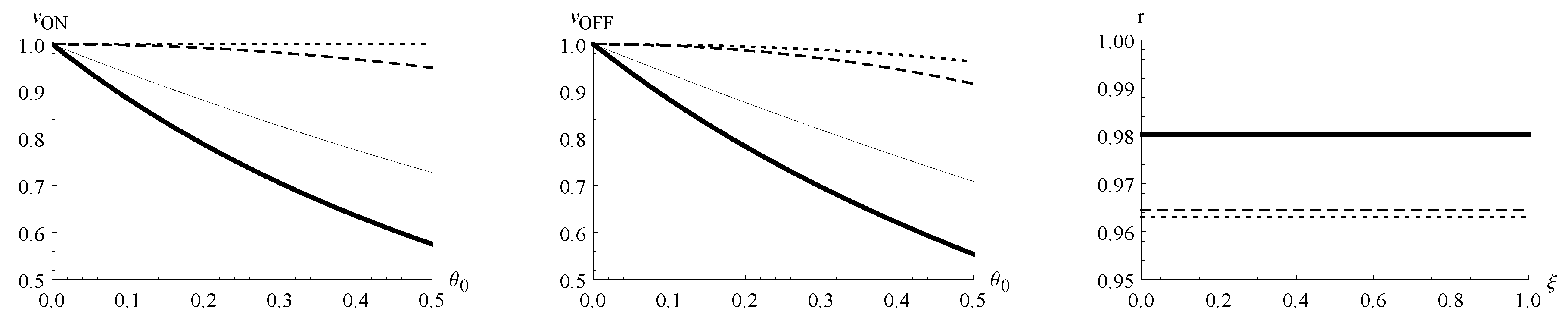
- Each and every numerical value of the geodesic speeds corresponding to the various quantum driving strategies considered in this paper becomes smaller when departing from the on-resonance condition (see Figure 3, for instance). In general, quantum driving strategies characterized by a high geodesic speed appear to be very sensitive to off-resonance effects. Instead, strategies yielding geodesic paths with smaller geodesic speed values seem to be more robust against departures from the on-resonance condition. These observations can be understood from Figure 4.
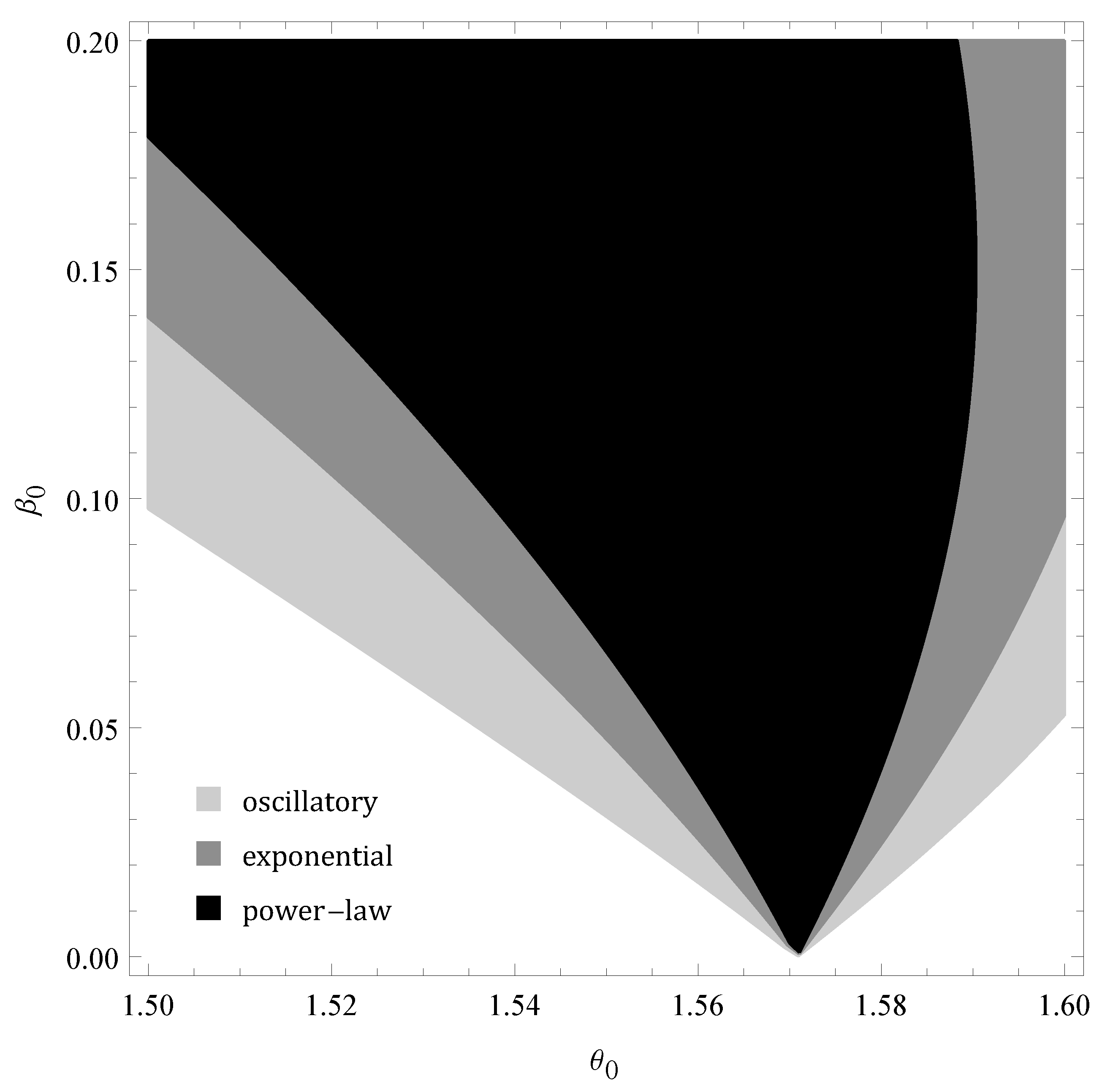
- (4)
- In the off-resonance regime, there emerges a sensitive dependence of the geodesic speeds on the initial conditions. This, in turn, can cause a change in the ranking of the various quantum driving strategies. In particular, the strategy specified by a constant Fisher information is no longer the absolute best strategy in terms of speed. Indeed, it is possible to find two-dimensional (2D) parametric regions where this strategy is being outperformed by all the remaining strategies both in terms of speed and robustness. In general, these 2D regions are more extended for the less robust strategies (see Equations (94) and (95)). For instance, we can identify 2D regions where the speed-based ranking becomes: (1) Oscillatory strategy; (2) exponential-law decay strategy; (3) power-law decay strategy. Instead, considering the very same 2D regions, the robustness-based ranking is given by: (1) Power-law decay strategy; (2) exponential-law decay strategy; (3) oscillatory strategy. In these 2D regions, the constant strategy is the worst, both in terms of speed and robustness. These findings are illustrated in Figure 5.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Violating a Resonance Condition
Appendix A.1. A Classical Scenario
Appendix A.2. A Quantum Scenario
Appendix B. Speed of Geodesics
References
- Jackson, J.D. Classical Electrodynamics; John Wiley & Sons, Inc.: New York, NY, USA, 1999. [Google Scholar]
- Sakurai, J.J. Modern Quantum Mechanics; Addison-Wesley Publishing Company, Inc.: Boston, MA, USA, 1994. [Google Scholar]
- D’Alessandro, D.; Dahleh, M. Optimal control of two-level quantum systems. IEEE Trans. Autom. Control 2001, 46, 866. [Google Scholar] [CrossRef]
- Boscain, U.; Charlot, G.; Gauthier, J.-P.; Guerin, S.; Jauslin, H.-R. Optimal control in laser-induced population transfer for two- and three-level quantum systems. J. Math. Phys. 2002, 43, 2107. [Google Scholar] [CrossRef]
- Romano, R. Geometric analysis of minimum-time trajectories for a two-level quantum system. Phys. Rev. A 2014, 90, 062302. [Google Scholar] [CrossRef]
- Byrnes, T.; Forster, G.; Tessler, L. Generalized Grover’s algorithm for multiple phase inversion states. Phys. Rev. Lett. 2018, 120, 060501. [Google Scholar] [CrossRef]
- Cafaro, C.; Alsing, P.M. Continuous-time quantum search and time-dependent two-level quantum systems. Int. J. Quantum Inf. 2019, 17, 1950025. [Google Scholar] [CrossRef]
- Aharonov, Y.; Anandan, J.; Popescu, S.; Vaidman, L. Superpositions of time evolutions of a quantum system and a quantum time-translation machine. Phys. Rev. Lett. 1990, 64, 2965. [Google Scholar] [CrossRef]
- Kempf, A.; Prain, A. Driving quantum systems with Superoscillations. J. Math. Phys. 2017, 58, 082101. [Google Scholar] [CrossRef]
- Barredo, D.; Labuhn, H.; Ravets, S.; Lahaye, T.; Browaeys, A. Coherent excitation transfer in a spin chain of three Rydberg atoms. Phys. Rev. Lett. 2015, 114, 113002. [Google Scholar] [CrossRef]
- Schempp, H.; Gunter, G.; Wuster, S.; Weidemuller, M.; Whitlock, S. Correlated exciton transport in Rydberg-dressed-atom spin chains. Phys. Rev. Lett. 2015, 115, 093002. [Google Scholar] [CrossRef]
- Shi, Z.C.; Wang, W.; Yi, X.X. Population transfer driven by off-resonant fields. Opt. Express 2016, 24, 21971. [Google Scholar] [CrossRef]
- Hirose, M.; Cappellaro, P. Time-optimal control with finite bandwidth. Quantum Inf. Process. 2018, 17, 88. [Google Scholar] [CrossRef]
- Allen, L.; Eberly, J.H. Optical Resonance and Two-Level Atoms; Dover Publications: New York, NY, USA, 1987. [Google Scholar]
- Laucht, A.; Simmons, S.; Kalra, R.; Tosi, G.; Dehollain, J.P.; Muhonen, J.T.; Freer, S.; Hudson, F.E.; Itoh, K.M.; Jamieson, D.N.; et al. Breaking the rotating wave approximation for a strongly driven dressed single-electron spin. Phys. Rev. B 2016, 94, 161302. [Google Scholar] [CrossRef]
- Dai, K.; Wu, H.; Zhao, P.; Li, M.; Liu, Q.; Xue, G.; Tan, X.; Yu, H.; Yu, Y. Quantum simulation of the general semi-classical Rabi model in regimes of arbitrarily strong driving. Appl. Phys. Lett. 2017, 111, 242601. [Google Scholar] [CrossRef]
- Cafaro, C.; Alsing, P.M. Theoretical analysis of a nearly optimal analog quantum search. Phys. Scr. 2019, 94, 085103. [Google Scholar] [CrossRef]
- Gassner, S.; Cafaro, C.; Capozziello, S. Transition probabilities in generalized quantum search Hamiltonian evolutions. Int. J. Geom. Methods Mod. Phys. 2020. accepted. [Google Scholar] [CrossRef]
- Farhi, E.; Gutmann, S. Analog analogue of a digital quantum computation. Phys. Rev. A 1998, 57, 2403. [Google Scholar] [CrossRef]
- Cafaro, C.; Alsing, P.M. Decrease of Fisher information and the information geometry of evolution equations for quantum mechanical probability amplitudes. Phys. Rev. E 2018, 97, 042110. [Google Scholar] [CrossRef] [PubMed]
- Cafaro, C.; Alsing, P.M. Information geometry aspects of minimum entropy production paths from quantum mechanical evolutions. Phys. Rev. E 2019, in press. [Google Scholar]
- Messina, A.; Nakazato, H. Analytically solvable Hamiltonians for quantum two-level systems and their dynamics. J. Phys. A Math. Theor. 2014, 47, 445302. [Google Scholar] [CrossRef]
- Grimaudo, R.; de Castro, A.S.M.; Nakazato, H.; Messina, A. Classes of exactly solvable generalized semi-classical Rabi systems. Ann. Phys. 2018, 2018, 1800198. [Google Scholar] [CrossRef]
- Braunstein, S.L.; Caves, C.M. Statistical distance and geometry of quantum states. Phys. Rev. Lett. 1994, 72, 3439. [Google Scholar] [CrossRef] [PubMed]
- Berry, M.V. Quantal phase factors accompanying adiabatic changes. Proc. R. Soc. Lond. A 1984, 392, 45. [Google Scholar]
- Aharonov, Y.; Anandan, J. Phase change during a cyclic quantum evolution. Phys. Rev. Lett. 1987, 58, 1593. [Google Scholar] [CrossRef] [PubMed]
- Resta, R. Manifestations of Berry’s phase in molecules and condensed matter. J. Phys. Condens. Matter 2000, 12, R107. [Google Scholar] [CrossRef]
- Braunstein, S.L.; Caves, C.M.; Milburn, G.J. Generalized uncertainty relations: Theory, examples, and Lorenz Invariance. Ann. Phys. 1996, 247, 135. [Google Scholar] [CrossRef]
- Cafaro, C.; Mancini, S. An information geometric viewpoint of algorithms in quantum computing. AIP Conf. Proc. 2012, 1443, 374. [Google Scholar]
- Cafaro, C.; Mancini, S. On Grover’s search algorithm from a quantum information geometry viewpoint. Physica A 2012, 391, 1610. [Google Scholar] [CrossRef]
- Cafaro, C. Geometric algebra and information geometry for quantum computational software. Physica A 2017, 470, 154. [Google Scholar] [CrossRef]
- Amari, S.; Nagaoka, H. Methods of Information Geometry; Oxford University Press: Providence, RI, USA, 2000. [Google Scholar]
- Felice, D.; Cafaro, C.; Mancini, S. Information geometric methods for complexity. Chaos 2018, 28, 032101. [Google Scholar] [CrossRef]
- Castelvecchi, D. Clash of the physical laws. Nature 2017, 543, 597. [Google Scholar] [CrossRef]
- Faist, P.; Renner, R. Fundamental work cost of quantum processes. Phys. Rev. X 2018, 8, 021011. [Google Scholar] [CrossRef]
- Campbell, S.; Deffner, S. Trade-off between speed and cost in shortcuts to adiabaticity. Phys. Rev. Lett. 2017, 118, 100601. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.M. Riemannian Manifolds: An Introduction to Curvature; Springer: New York, NY, USA, 1997. [Google Scholar]





© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cafaro, C.; Gassner, S.; Alsing, P.M. Information Geometric Perspective on Off-Resonance Effects in Driven Two-Level Quantum Systems. Quantum Rep. 2020, 2, 166-188. https://doi.org/10.3390/quantum2010011
Cafaro C, Gassner S, Alsing PM. Information Geometric Perspective on Off-Resonance Effects in Driven Two-Level Quantum Systems. Quantum Reports. 2020; 2(1):166-188. https://doi.org/10.3390/quantum2010011
Chicago/Turabian StyleCafaro, Carlo, Steven Gassner, and Paul M. Alsing. 2020. "Information Geometric Perspective on Off-Resonance Effects in Driven Two-Level Quantum Systems" Quantum Reports 2, no. 1: 166-188. https://doi.org/10.3390/quantum2010011
APA StyleCafaro, C., Gassner, S., & Alsing, P. M. (2020). Information Geometric Perspective on Off-Resonance Effects in Driven Two-Level Quantum Systems. Quantum Reports, 2(1), 166-188. https://doi.org/10.3390/quantum2010011