Abstract
The rapid evolution of autonomous vehicles (AVs) has ignited widespread interest in their potential to transform mobility and transportation ecosystems. However, despite significant technological advances, the acceptance of AVs by the public remains a complex and multifaceted challenge. This state-of-the-art review explores the key factors influencing AV acceptance, focusing on the intersection of artificial intelligence (AI) services, user experience, social dynamics, and regulatory landscapes across diverse global regions. By analyzing trust, perceived safety (PS), cybersecurity, and user interface design, this paper delves into the psychological and behavioral drivers that shape public perception of AVs. It also highlights the role of demographic segmentation and media influence in accelerating or hindering adoption. A comparative analysis of AV acceptance across North America, Europe, Asia, and emerging markets reveals significant regional variations, influenced by regulatory frameworks, economic conditions, and social trends. Also, this review reveals critical insights into the perceived safety associated with AV technology, including legal uncertainties and cybersecurity concerns, while emphasizing the future potential of AVs in urban environments, public transit, and autonomous logistics fleets. This review concludes by proposing strategic roadmaps and policy implications to accelerate AV adoption, offering a forward-looking perspective on how advances in technology, coupled with targeted industry and government initiatives, can shape the future of autonomous mobility. Through a comprehensive examination of current trends and challenges, this paper provides a foundation for future research and innovation aimed at enhancing public acceptance and trust in AVs.
1. Introduction
The road transport system plays a vital role in facilitating the movement of goods and people through an established road network. The efficiency of this system hinges on several factors, including travel distance, cargo weight and volume, cargo type, and the quality of local road infrastructure [1]. Together, these elements constitute what is commonly referred to as a transportation system, designed to meet the regional demand for mobility and logistics services [2]. In transportation studies, examining the interplay between road capacity and traffic volume is essential to understanding system performance. However, substantial issues persist within road transport systems, including traffic congestion, road accidents, and infrastructural inadequacies that have become more pronounced within the context of connected and automated driving environments [3].
Advancements in automotive technology have led to heightened expectations for travel comfort and convenience among consumers [4]. The integration of autonomous mobility solutions into the transportation sector for goods and services has become increasingly essential, underscoring its transformative potential [5]. Recent discourse emphasizes the impact that autonomous vehicles (AVs) are projected to have in urban mobility, particularly in goods transport, while also highlighting the challenges associated with such disruptive technology [6]. Anticipated benefits include reductions in carbon emissions and travel time, providing drivers with the chance to be involved in other activities rather than dedicating extensive time to manual driving. As a hallmark of next-generation vehicle technology, AVs are expected to greatly enhance the overall travel experience [7]. AV technology encompasses a complex, multi-layered system, integrating advanced sensor technology, communication networks, and vehicular computing. These components form a robust technical foundation that empowers emerging electric vehicles to compete with, and potentially surpass, traditional vehicles [8]. However, the advance and deployment of AVs raise substantial legal, ethical, and safety concerns, particularly due to the ongoing evolution of legislation and the potential for human rights issues related to AV-related accidents [9]. While AVs have the capacity to significantly reduce accidents attributable to human error, researchers are closely monitoring their safety performance as they become more common on public roads. This ongoing research includes analyzing accident data to enhance AV safety and foster public confidence in this emerging technology [10]. Moreover, the legal and ethical ramifications of accidents involving AVs continue to generate widespread interest, underscoring the need for comprehensive studies on road safety in the context of autonomous driving. To trace the historical development of AV technology and gain insights into current research on road safety problems, this paper reports the recent trends in public acceptance of AVs [11]. In contrast to traditional literature review methods, knowledge mapping offers a more holistic approach, calculating results based on citation frequencies. This methodology mitigates biases stemming from authorship, disciplinary constraints, or subjective judgment, and its visual representation facilitates clarity and readability of the findings [12].
The concept of AVs dates back to the early 19th century [13]. Between 1964 and the early 2000s, countries including the United States (US), Germany, France, and Japan initiated research and development programs focused on autonomous truck and bus platooning, video-based driving scene processors, and intelligent vehicle systems. Figure 1 shows the modern features of AVs, making headlines worldwide because of the safer travel experience they promise to provide in the future [14]. By 2006, automotive companies like Volvo began integrating AV technologies into their models, and in 2017, they launched fully autonomous test vehicles classified under SAE levels 1 and 2 onto public road networks. Since 2014, Tesla, an additional and major industry player, has produced electric vehicles capable of autonomous operation for approximately 90% of travel time without human intervention [15]. The rising penetration of AVs represents a transformative trend within the transportation sector, with projections pointing toward a significant transition to self-driving technologies in the near future [16]. Nonetheless, recent studies indicate that public acceptance of AV technology remains relatively low [17]. Despite advancements in safety features, public confidence has been impacted by reports of AV-related accidents, which have tempered public willingness to embrace these vehicles. While AV-related incidents often attract the majority of media coverage, it is critical that the public also recognize the broad advantages of AVs, particularly their potential to improve safety and transform transportation [18]. Key advantages include a substantial reduction in accident rates, enhanced mobility for those powerless to drive, decreased emissions through optimized fuel efficacy, and alleviation of traffic crowding [19].
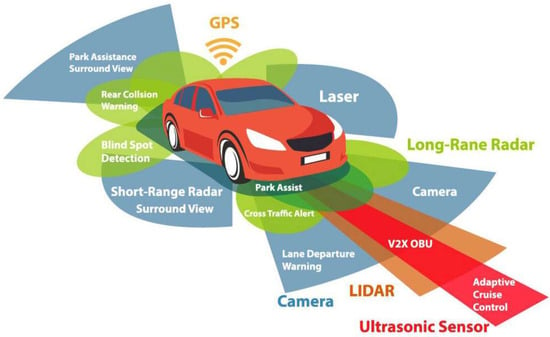
Figure 1.
Features of an AV (adapted with permission from [14]).
The exploration of public acceptance regarding AVs has been predominantly undertaken by researchers from Europe and North America [20,21,22,23]. These studies provide valuable understanding of the variables influencing and forecasting societal acceptance of this transformative technology. These studies largely draw on survey data capturing public perceptions and attitudes toward automated driving technologies [23]. Research has underscored the significance of perception and trust as key determinants of AV acceptance, identifying both as critical factors influencing public openness to adopting AV technology [20]. Moreover, it has been demonstrated that providing users with information on driving objectives and vehicle operations enhances trust in autonomous systems [21]. Subsequent investigations have analyzed the impact of various elements, including personality characteristics, enthusiasm for driving, situational usage contexts, prior exposure to AV systems, and individual differences, on the acceptance of different automation levels in autonomous vehicles. The findings underscore that each of these factors uniquely shapes public receptivity to adopting AV technologies [22]. Research has also addressed the role of vehicle performance properties and policy frameworks in shaping AV acceptance. Investigations into vehicle-specific attributes—such as driving mode, safety features, economic benefits, and perceived risk—show these factors to be reliable predictors of purchase intentions [24]. Moreover, a limited but growing body of research has explored how driving environment conditions impact AV acceptance. In particular, studies focusing on mixed traffic scenarios and the implementation of dedicated AV lanes suggest that public perceptions of safety improve in environments where dedicated lanes are available, indicating a preference for segregated AV traffic in general transportation contexts [25]. Figure 2 shows the estimated and expected availability of AVs in several regions worldwide.
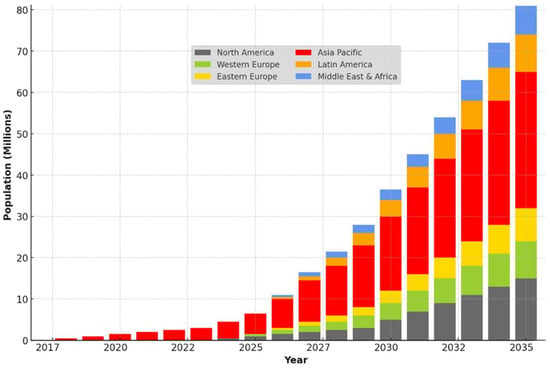
Figure 2.
Estimated and expected availability of AVs in several regions worldwide.
Policy considerations surrounding AV adoption highlight that legal liability, regulatory frameworks, and public acceptance are critical to the widespread implementation of vehicle automation [26]. Research on public acceptance reveals that individuals in Europe and North America often express concerns regarding legal issues, particularly those related to accident liability [23]. A cross-national study examining attitudes toward AV technology shows that while there is a general interest in automation across various countries, attitudes and specific concerns vary significantly by region [20]. For instance, respondents from the US and Japan prioritize security issues, including data privacy and AV performance under extreme weather conditions, whereas participants from China and India emphasize the importance of ongoing development in AV technology [27]. Research on AV acceptance among Chinese customers is relatively limited, with the earliest investigations traced back to the study reported by Schoettle [28], which focused on analyzing international variations in public opinion regarding self-driving vehicles [29]. A 2017 survey further explored Chinese consumers’ perspectives, intentions, and purchasing considerations concerning AVs [28,29,30]. Studies have since focused on Chinese public acceptance of fully and highly AVs, examining this acceptance through the lens of perception and trust [30,31]. Moreover, research has investigated factors affecting AV acceptance among Chinese users by applying the theory of technology acceptance model and planned behavior, with an emphasis on attitudes, cognitive factors, psychological influences, and behavioral intentions (BIs).
This review seeks to address current gaps in understanding public perceptions of AV technology by providing an integrated analysis that spans psychological, societal, regulatory, and technical domains. Drawing upon a wide array of international studies, this paper synthesizes diverse research findings to deliver a detailed assessment of the factors influencing AV acceptance, including demographic variations, media impact, and the influence of evolving policy frameworks. Using a comparative approach across regions, this analysis highlights how distinct market-specific challenges and opportunities shape public attitudes and adoption pathways for AVs. This study ultimately aims to enrich the discourse on autonomous mobility by proposing strategic directions to mitigate public concerns, build trust, and facilitate a seamless shift toward autonomous transportation. With insights tailored for researchers, industry leaders, and policymakers, this review aspires to provide a blueprint not only for technological advancement but also for cultivating societal readiness and acceptance as transportation systems undergo rapid transformation. Table 1 shows the detailed historical development of AVs.

Table 1.
Detailed historical development of AVs.
2. The Current State and Technological Development Trends of Autonomous Driving Technology
Advances in AV technology have revolutionized the transportation sector by merging innovations from fields like AI, machine learning, and sensor engineering [32]. These innovations have transformed conventional vehicles into advanced systems capable of environmental perception and autonomous decision-making in real time [9]. Modern AVs operate through an intricate network of sensors including radar, LiDAR, cameras, and ultrasonic sensors that collect essential data for AI-driven navigation and control systems [33]. Machine learning, particularly in computer vision and deep learning, enables these systems to recognize objects, assess road conditions, and predict the movements of surrounding entities within the operational field [7]. Moreover, vehicle-to-everything (V2X) communication systems (Figure 3) [34] further augment situational awareness, allowing for real-time data exchange between AVs and nearby infrastructure. Despite these technological advancements, large-scale adoption faces challenges due to high development costs, unresolved safety issues, and gaps in regulatory frameworks. High-profile incidents, such as failures within Tesla’s autopilot system, underscore the critical need for further refinement and comprehensive safety evaluations prior to full market integration [35].
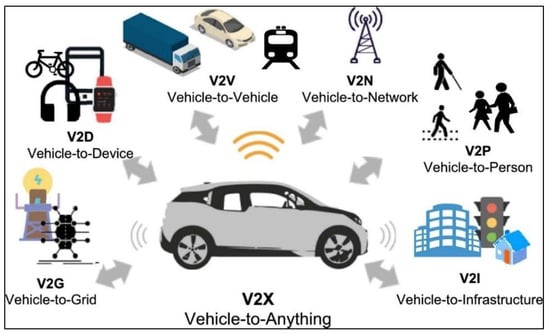
Figure 3.
Vehicle-to-everything (V2X) communication systems (adapted with permission from [34]).
Since the launch of the first self-driving vehicle nearly four decades ago, the automotive sector has undergone substantial advancements and innovations [36]. However, achieving widespread deployment of fully AVs remains a formidable challenge. The industry’s present focus lies in developing advanced driver-assistance systems (ADAS) and moving towards commercially feasible, fully AV systems [37]. Many automakers are prioritizing the development of Level 2 (L2) and Level 3 (L3) autonomy over the next five to ten years due to their comparatively lower technical demands [38]. This approach allows manufacturers to incorporate autonomous features into consumer vehicles within existing safety standards, gradually acclimating the public to these technological advancements [39]. As of November 2023, most of the industry remains at the L2 stage, which provides partial automation but still necessitates driver engagement [40]. Although “autonomous driving” has become a prevalent term, truly autonomous vehicles are yet to reach the commercial market, as current road-testing mandates human oversight and intervention.
Recent advancements (Figure 4), including the deployment of unmanned taxi services, represent substantial progress toward achieving Level 4 (L4) autonomation. These systems, however, remain limited to specific operational areas and have yet to reach the fully autonomous capabilities outlined in Level 5 (L5) autonomy [41]. While the journey to complete automation continues, developments in this field are on an encouraging trajectory, holding promises for substantial societal benefits. In the domain of autonomous taxi services, companies such as Cruise are at the forefront of these initiatives [41]. Nonetheless, challenges persist, particularly in complex urban environments, where companies like Cruise encounter regulatory restrictions that aim to control the number of self-driving vehicles on public roads due to issues related to operational disruptions.
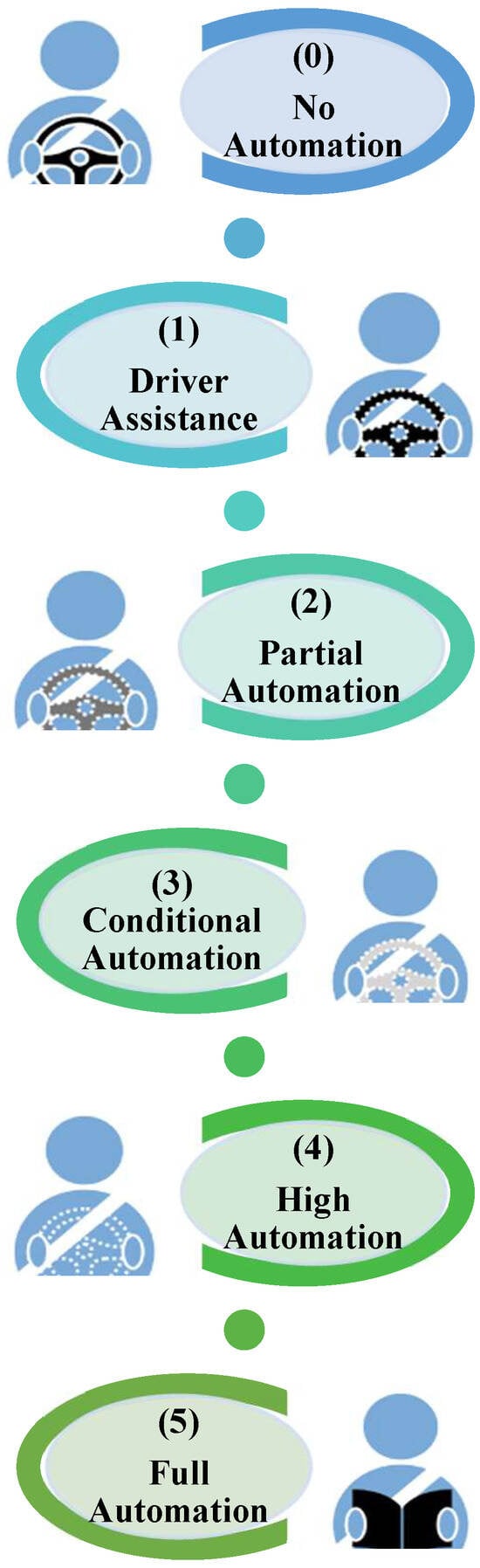
Figure 4.
Levels of automation of AVs.
The consumer vehicle market is witnessing a growing integration of advanced driver-assistance features—for example, automatic emergency breaking, adaptive cruise control, lane departure alerts, and dynamic stability management. Key industry players, including Tesla’s autonomous driving division, are at the forefront of these innovations [35]. Tesla has notably expanded the reach of autonomous technologies through its full self-driving (FSD) subscription, enabling semi-autonomous driving assistance specifically suited for urban settings. In the commercial sector, lane-keeping, autonomous trucks equipped with Level 4 (L4) and Level 5 (L5) capabilities hold considerable potential for long-distance highway transportation [41]. Leading firms in autonomous trucking technology include Aurora, Embark Trucks, and Daimler Trucks. Together, advancements in both consumer vehicles and commercial fleets represent substantial progress toward fully AV solutions.
As of 2024, AV technology has made notable strides but remains largely within the scope of partial and conditional automation, corresponding to Levels 2 and 3 on the SAE autonomy scale [42]. At these stages, AVs are capable of executing certain driving tasks autonomously, including adaptive cruise control, and emergency braking; however, human oversight remains essential for managing complex or unexpected scenarios. Leading companies, such as Waymo, Uber, and Tesla, are at the forefront of AV innovation, piloting various projects with limited commercial applications such as Waymo’s autonomous taxi service in Phoenix and Tesla’s full self-driving beta program [35].
Nonetheless, these systems still require human intervention, particularly in unpredictable conditions or adverse weather, where current sensor technologies and decision-making algorithms face limitations [43]. The development of cooperative driving systems, facilitated by advancements in vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication, has further supported AV capabilities, enabling vehicles to exchange information, coordinate actions, and enhance traffic efficiency [42]. Despite these technological advancements, significant challenges hinder widespread adoption (Figure 5). The high costs associated with sensors, unresolved safety issues due to the limitations of current AI models, and the absence of uniform regulatory standards across jurisdictions remain critical obstacles to large-scale deployment.
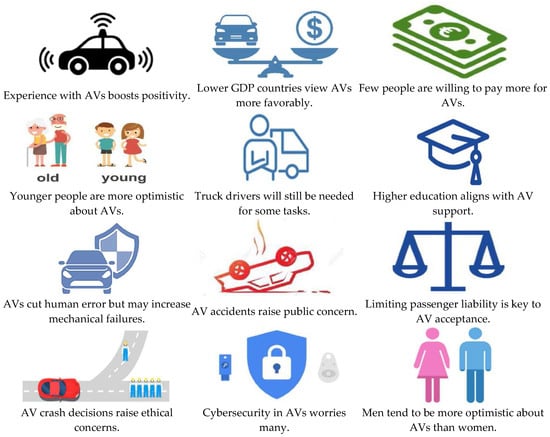
Figure 5.
Public perspective on acceptance of AV technology (adapted with permission from [44]).
The trajectory of AV technology is anticipated to advance considerably, propelled by breakthroughs in AI, sensor integration, communication networks, and evolving regulatory frameworks [43]. Reaching Level 5 autonomy, where vehicles operate independently in all environments without human input, remains a primary objective, with many industry leaders projecting this milestone within the next decade [45]. The continued enhancement of machine learning algorithms, especially through reinforcement learning and neural networks, is expected to enable AVs to become increasingly adaptive, responding autonomously to a wider array of complex driving conditions [46]. With the expansion of 5G networks, AVs will benefit from high-speed, low-latency connectivity that facilitates real-time interaction with their surroundings, improving traffic coordination and alleviating congestion [43]. Sensor technological advancements are also projected to enhance affordability and efficiency, bolstering the commercial feasibility of AVs. Emerging technologies like quantum computing and neuromorphic chips promise transformative processing capabilities, enabling faster and more energy-efficient data handling [45]. In addition, AVs are envisioned as integral components of smart city infrastructures, where interconnected systems optimize urban mobility and resource management [4]. In densely populated areas, shared autonomous mobility services are likely to become a cornerstone of transportation, reducing reliance on private vehicles and supporting sustainability efforts by lowering emissions [3]. Despite these promising developments, the journey toward full autonomy presents significant challenges [10]. Establishing comprehensive, globally harmonized regulatory standards, ensuring robust cybersecurity for increasingly networked systems, and addressing public concerns surrounding safety, ethics, and potential impacts on employment will be essential to the successful integration of AV technology [7]. Nonetheless, the transformative potential of AVs, which include enhanced safety, decreased traffic congestion, and more efficient urban transport solutions, positions this technology as a pivotal force in the future landscape of mobility. Figure 6 illustrates the key developments trends in the AV industry from the 1980s–2023.
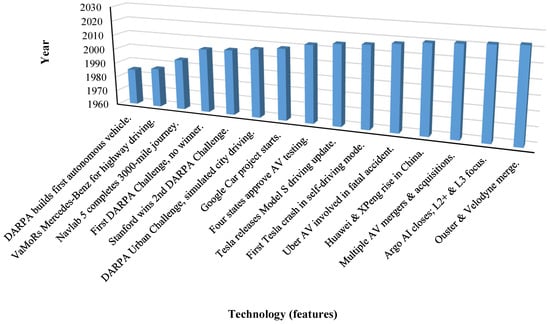
Figure 6.
Key developments trends in the AVs industry from the 1980s–2023 (raw data obtained from DIGITIMES Asia, 2023 and [38]).
3. Key Factors Influencing Autonomous Vehicle Acceptance
3.1. Trust, Cybersecurity, and Perceived Safety
Trust, cybersecurity, and PS are critical determinants in the public acceptance of AVs, as they address key concerns about the dependability and security of this emerging technology [20]. Building trust in AVs requires consistent, transparent communication regarding the vehicle’s capabilities, operational performance, and decision-making processes. Users must have confidence that the vehicle can navigate safely across various scenarios, especially when faced with complex or unforeseen conditions [21]. Consequently, PS plays a central role in fostering user acceptance; individuals are more inclined to embrace AV technology if they believe it can competently manage hazards, prevent accidents, and prioritize passenger well-being [47]. This perception is shaped not only by the AV’s physical performance but also by the information relayed through its user interface, which should convey the vehicle’s situational awareness and decision-making rationale. Any lack of clarity in how AVs handle safety/critical situations risks undermining trust, thereby reducing public confidence in the technology [48].
Cybersecurity is equally critical in the deployment of AVs, addressing the vulnerabilities these systems face within an increasingly interconnected digital environment [49]. AVs depend on a network of sensors, software, and data exchanges with external systems, creating potential entry points for malicious attacks or system intrusions. Concerns around cybersecurity such as hacking or unauthorized system access raise substantial worries regarding both individual safety and the safeguarding of sensitive data [40]. Public perception of these cybersecurity risks plays a pivotal role in AV acceptance, as users are unlikely to trust technology perceived as susceptible to external threats. One of the central ethical dilemmas involves the decision-making algorithms that govern AV behavior in accident scenarios, often framed through the lens of moral philosophy, such as variations of the trolley problem [50]. These algorithms must navigate complex trade-offs between minimizing harm and assigning value to different outcomes, raising profound questions about whose safety should be prioritized. Moreover, regulatory gaps persist in providing clear guidance on how these ethical decisions should be standardized across manufacturers and jurisdictions, leading to inconsistencies and potential public distrust [40]. Liability distribution further complicates the ethical landscape, as it is unclear how responsibility should be apportioned among vehicle manufacturers, software developers, users, and possibly infrastructure providers when failures occur [40]. Current studies emphasize the urgency of developing transparent, consistent frameworks that address these dilemmas to support the equitable and responsible integration of AVs into society [51]. Without a comprehensive ethical foundation, public acceptance and the long-term success of AV technologies may be significantly undermined. Consequently, robust cybersecurity protocols, encompassing encryption, secure communication channels, and real-time monitoring systems, are essential to preserving AV integrity and minimizing risks [52]. To secure public confidence, the AV industry must prioritize the development of highly secure systems alongside transparent communication of these protections, instilling a sense of reliability and safety in AV technology [40]. As AV advancements continue, establishing and enforcing comprehensive security frameworks will be crucial to protecting these vehicles from an evolving spectrum of cyber threats (Figure 7) [53].
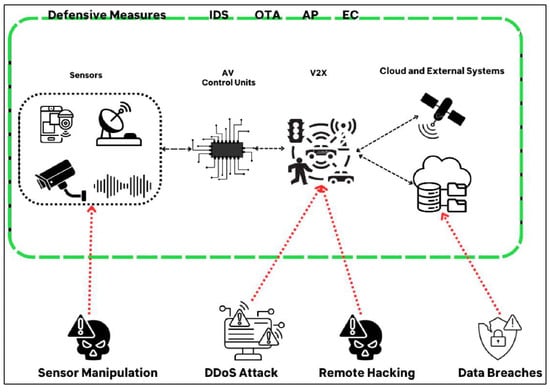
Figure 7.
AV cybersecurity threats and eco-system (adapted with permission from [53]).
Trust is a foundational factor in the acceptance of AV technology [47]. Maintaining an optimal level of trust is essential, as it must align with the system’s actual performance to foster a balanced reliance on automation. Drivers must have sufficient trust to engage with advanced technologies without either under-trusting (or distrusting) or over-trusting the system [54]. Over-trust can result in misuse or unintended reliance on the system, potentially leading to serious or even fatal incidents. Conversely, widespread distrust among current or prospective users may lead to disuse of vehicle automation. Transparency is a critical element in building trust [48]. Often, trust issues arise from insufficient information about the behavior of complex systems, such as an AV. Transparency, which encompasses both clarity and predictability, allows users to understand a system’s operational logic, reasoning, and intended actions [55]. In the context of AVs, a lack of transparency such as limited information about the vehicle’s anticipated maneuvers can foster an inherent sense of distrust [56]. Effective user interface design can mitigate unnecessary involvements by improving the driver’s awareness of the vehicle’s capabilities and planned actions [57]. Research has demonstrated that transparency in automation systems aids in calibrating trust appropriately [58]. However, while previous studies [55,56,57,58] highlight the importance of transparency, limited focus remains on how user interface transparency specifically impacts driver trust.
The role of trust in shaping the acceptance of AVs has been the subject of extensive scholarly investigation. Some studies have examined the direct relationship between trust and the willingness to adopt autonomous vehicle (AV) technologies [36], while others have emphasized that a lack of trust poses a significant barrier to AV adoption [59]. Research also addresses the role of trust across varying levels of AV automation, suggesting that trust levels substantially affect AV acceptance [60]. In particular, the acceptance of Level 5 AVs has been shown to hinge on both trust and perceived risk. Although traditional technology acceptance models (TAMs) widely employed in studies of AV adoption report no significant gender differences, many researchers emphasize that trust and risk are crucial factors that these models alone cannot fully capture [61]. Beyond perceived usability (PU) and apparent ease of use (PEOU), trust emerges as a fundamental condition for users’ willingness to accept and engage with self-driving technology [62]. Trust not only exerts a direct influence on usage intentions but also has an indirect effect, reducing perceived risk and enhancing TAM-related perceptions [63]. The role of risk in AV adoption, however, remains ambiguous [64]. While self-driving vehicles are often associated with risks that may deter user acceptance, some findings suggest that perceived risk does not significantly impact long-term usage intentions for AVs [65]. The intricate relationship between trust and perceived risk remains an area of ambiguity, prompting scholars to advocate for further investigation to determine both the direction and magnitude of this interaction [66]. Although distinctions among various types of trust are seldom made in the literature, perceived risk is more commonly dissected into distinct dimensions. However, the findings across studies have been inconsistent. In the realm of autonomous vehicles, research has predominantly focused on three key risk dimensions: performance, security, and privacy. Notably, the broad conceptualization of risk frequently falls short in providing robust explanatory power for understanding public acceptance of AV technology [36]; distinguishing among these risk types may provide insight into factors that shape user acceptance [67]. Nevertheless, studies rarely integrate and test these different risk dimensions within a unified model, underscoring the need for more comprehensive investigations.
In addition, it was discovered that the need to build trust and confidence in AV technologies is particularly pressing, as their widespread adoption hinges on public acceptance. Transparent communication about AV capabilities, including safety features and operational performance, is essential for addressing public concerns and fostering trust. Clear information on how AVs function, their limitations, and how they respond to various driving conditions can help demystify the technology. Moreover, developing comprehensive legal and regulatory frameworks is critical to ensure that AVs are held to rigorous safety and ethical standards, addressing issues such as liability and accountability in case of accidents or system failures. Additionally, safeguarding AVs from cybersecurity threats, such as hacking and data breaches, requires significant investment in robust security measures. The history of technological innovation, particularly in the field of transportation, demonstrates that advancements are often uneven and non-linear, with rapid progress sometimes followed by setbacks or slower adoption due to societal, technical, and regulatory challenges. Thus, building trust in AV technology is not only about technical improvements but also about creating a secure, transparent, and ethically sound environment that can support its integration into society.
3.2. User Experience and Interface Design
The acceptance of AVs is heavily influenced by the design and functionality of their user experience (UX) and user interface (UI), as these components are central to shaping users’ interactions, trust, and overall perceptions of the technology [68]. Trust in AV adoption is strengthened through transparent interface design, which provides users with real-time operational feedback, clarifies decision-making processes, and conveys predictive information about upcoming maneuvers [54]. Such transparency enhances user confidence by alleviating uncertainties, particularly when the interface communicates the AV’s intentions in a clear and efficient manner [69]. Moreover, user comfort and PS are critical for AV adoption, with interfaces that incorporate intuitive human–machine interaction elements, such as visual and auditory signals, enhancing users’ sense of control and security [68].
The impact of UX and interface design on the acceptance of AVs has attracted increasing scholarly attention, as reflected in a growing body of research [68]. A crucial component of UX in AV technology is the design of external human–machine interfaces (EHMI), which facilitate interactions between AVs and pedestrians. It has been demonstrated that design elements such as EHMIs significantly influence pedestrian behavior and acceptance, with individual factors, including nationality and parenthood, affecting levels of trust in AV technology [70]. Moreover, the importance of inclusive design in AV systems has been underscored, with recent reviews of human–computer interaction (HCI) systems in AVs highlighting innovative technologies, such as voice interfaces and augmented reality displays, that improve accessibility and enhance user satisfaction [71].
Customization and simulated driving experiences have become essential in influencing the acceptance of AVs. As AV technology advances, users increasingly seek sophisticated features that deliver a seamless, distraction-free experience, akin to the intuitive interactions they enjoy with their smartphones. Research indicates that exposure to simulated AV experiences enhances acceptance, notably among older adults, while customizable navigation interfaces affect acceptance differently based on users’ age and educational background [72]. Similarly, augmented reality head-up displays (AR-HUDs) have positively impacted user willingness to adopt AV technology by strengthening perceived trust and engagement [73]. Furthermore, transparency within AV systems plays a crucial role in enhancing user experience, especially by addressing user concerns during unexpected scenarios. It is shown that conversational interfaces, which improve system transparency, help to mitigate negative user experiences and increase acceptance, even when interacting with imperfect AI systems [74].
Personalization is a critical factor influencing the acceptance of AVs. The “Persona-PhysioSync AV” framework, for instance, tailors the AV experience by monitoring passengers’ physiological and emotional states, enabling real-time adjustments that enhance trust and comfort [75]. Research also emphasizes the positive impact of sharing personal information about fellow passengers during automated rides, particularly in nighttime scenarios, on users’ sense of security and overall experience in shared AV contexts [76]. Moreover, studies provide insights into how cultural and psychological variables, such as PS and technological trust, mediate the relationship between human–machine interaction and AV acceptance, particularly within culturally diverse environments like Indonesia [77]. Figure 8 depicts the advanced features in AVs for smarter and digitized user experiences.
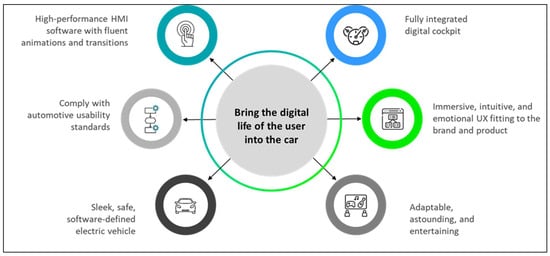
Figure 8.
Advanced features in AVs for smarter and digitized user experiences.
Beyond fostering trust and comfort, the capacity for personalization such as customizable driving modes and manual override features enhances users’ sense of control, a crucial psychological factor for broader AV acceptance [22]. Effective UI design also plays a key role by minimizing cognitive load; prioritizing simplicity and clarity is essential, as overly complex interfaces can impair usability and detract from the user experience. A minimalist and intuitive design, supported by multimodal interaction options such as voice control and touchscreens, promotes ease of use while preventing information overload [78]. Moreover, aesthetic appeal and emotional engagement influence acceptance, as sleek, modern interfaces that evoke positive emotions significantly enhance the AV experience [75]. Ethical considerations, especially concerning decision-making in critical situations, alongside inclusive design that ensures accessibility for diverse users, are equally essential to foster societal acceptance of AVs [77]. Streamlining the learning process through consistent design across platforms and providing training opportunities further support user adoption [78]. Ultimately, integrating advanced UX/UI elements into AVs is vital for addressing both psychological and practical barriers to acceptance; well-designed interfaces not only elevate user satisfaction but also build the trust and confidence necessary for widespread AV adoption.
Participants were presented with a comprehensive overhead display featuring real-time visual updates about their immediate environment (Figure 9a) [68]. This dynamic interface offered continuous visibility during the driving session, covering a 60 m range ahead and a 10 m range behind the vehicle, along with two adjacent lanes. To facilitate easy identification, the participant’s vehicle was distinctly marked in red, while surrounding vehicles were depicted in gray (Figure 9b) [68]. In summary, the literature underscores the significant influence of UX and interface design on AV acceptance, with essential factors including customization, transparency, and personalization. Alongside these elements, inclusive design practices and cultural sensitivities are crucial to fostering broader public acceptance of AV technology.
Figure 9.
Visual UI showing a bird’s-eye view with surrounding (a) and maneuver (b) info pop-ups (adapted with permission from [68]).
3.3. Social Influence and Media Impact
Social influence and media impact are critical factors in shaping public acceptance of AVs, with societal attitudes and media portrayals exerting considerable influence on individuals’ perceptions and adoption of new technologies [64]. Social influence from the views and behaviors of peers, family, and larger social groups can either facilitate or impede AV acceptance, largely through the mechanism of social conformity [23]. Given that individuals often rely on others’ judgments when evaluating unfamiliar technologies, the endorsement or skepticism of early adopters, influential figures, and social networks can strongly influence public sentiment. Meanwhile, media impact reinforces these social dynamics by acting as a primary channel of information and framing public discourse on AV technology [79]. Positive media coverage that highlights the safety, efficiency, and convenience of AVs can build public trust and encourage acceptance, whereas negative reports, frequently focusing on accidents or technical failures, can heighten fear and resistance [80]. The media’s influence extends to regulatory and policy arenas, where its narratives often shape public debates and governmental responses [81]. Moreover, social media platforms introduce an interactive dimension, where user-generated content, reviews, and discussions can rapidly influence perceptions, especially among younger audiences more active on these platforms [82]. Thus, social influence and media impact, shaping by source credibility and narrative tone are pivotal in fostering either a climate of trust and interest or one of skepticism and apprehension surrounding AVs, ultimately playing a decisive role in their broader acceptance [22].
A substantial body of literature has explored consumer responses to AVs [69]. Previous studies have examined the effects of awareness, intention, attitudes, beliefs, and confidence in those beliefs [79]. These findings indicate that perceived usefulness, PEOU, and perceived trust are positively associated with the intention to adopt AV technology, while individuals with negative attitudes toward AVs often have limited knowledge about the technology, highlighting a psychological barrier to adoption within certain demographics [83]. Additional challenges highlighted in the literature encompass the high cost of vehicles, questions of liability, the risk of software malfunctions, safety concerns, and reluctance to cede control of the driving process [84]. Within the field of transportation studies, the role of social influence in shaping travel-related decisions has been extensively explored across diverse areas, such as the adoption of new technologies and the selection of activities [85]. A study focused on social influence within a narrow circle of close social contacts [80], while others expand the network to encompass friends, peers, colleagues, and those with weaker social ties [86]. Moreover, research on communication channels reveals that interpersonal communication plays a critical role in the dissemination of both factual and normative information, whereas some studies highlight the influence of non-verbal cues, such as observing societal behaviors, particularly regarding the market penetration of new innovations [87,88].
Research has highlighted various individual and societal concerns related to the deployment of AVs. These concerns include high maintenance costs, road usage fees, and expenses related to software and hardware components [32]; potential increases in fuel consumption and carbon dioxide emissions due to rising travel demand; legal and ethical challenges regarding the safety of users and pedestrians; privacy issues [89]; the risk of malicious hacking [90]; safety concerns in mixed traffic environments; and potential job losses in traditional transportation sectors [49]. A study using causal models of trust examined how social trust influences public acceptance, willingness to pay, and intent to adopt AVs [81]. The theory of planned behavior and the TAM were applied to assess willingness to use AVs in simulated driving tasks, with findings indicating that attitudes, subjective norms, perceived behavioral control, and trust are key predictors of AV adoption intentions [91]. Another study incorporated constructs such as ‘trust’ and ‘social influence’ to explore BIs toward AV usage [83], identifying trust and perceived usefulness as significant predictors of AV adoption [20]. Moreover, integrating the trust construct within TAM has shown that trust positively impacts BIs toward AV use [63]. Collectively, these studies underscore attitudes, perceived behavioral control, subjective norms, and trust as influential factors in shaping intentions to adopt AV technology.
The adoption of an innovation is influenced by a variety of factors [79], with the information disseminated through diverse communication channels being particularly significant. Such information contributes to raising awareness during the initial stage of knowledge acquisition [88], plays a pivotal role in shaping attitudes, either positively or negatively, towards the innovation, and ultimately guides the decision-making process to either embrace or reject the innovation [92]. Communication channels encompass both mass media and interpersonal networks. Mass media, which includes radio, television, newspapers, and similar outlets, delivers information broadly from a single source to a wide audience [93]. In contrast, interpersonal channels facilitate information exchange between individuals [79]. Mass media channels are especially influential during the early stages of innovation diffusion, serving to create awareness and having a pronounced effect on early adopters [94]. With the advent of digital communication, new channels like social media have emerged, blurring the distinction between mass media and interpersonal networks and providing a significant influence on the diffusion process [95]. AVs are often associated with several perceived advantages, including heightened safety, greater fuel efficiency, more efficient use of travel time, and enhanced accessibility [96]. On the other hand, common concerns that act as barriers to adoption include fears of equipment malfunction, hesitancy to surrender control of the vehicle, potential breaches of data privacy, and risks related to cybersecurity. Despite these well-documented perceptions, research has yet to explore how information delivered through various communication channels influences consumer preferences for AVs.
3.4. Legal and Regulatory Frameworks
The acceptance of AVs is significantly influenced by the legal and regulatory frameworks that govern their development, deployment, and operation [97]. These frameworks are essential for establishing safety, accountability, and public trust, which are critical for widespread adoption. A comprehensive and adaptable regulatory environment must balance innovation with risk management, addressing key issues such as liability in accidents, data privacy, cybersecurity, and ethical decision-making by AV systems [98]. Clear legal definitions regarding accountability, whether attributed to the manufacturer, software developer, or user, are essential for fostering public confidence in AV technology, especially in cases of malfunctions or accidents. Moreover, regulations surrounding data privacy and user information protection are crucial, given AVs’ reliance on extensive real-time data, directly impacting user trust and adoption willingness. Cybersecurity standards are equally vital, as AVs’ susceptibility to hacking or system breaches presents substantial safety risks that necessitate stringent regulatory safeguards [98]. Beyond safety, regulatory frameworks must address ethical concerns, such as AV decision-making in life-critical situations, which requires clear ethical guidelines that align with societal norms and values [40]. The consistency and harmonization of AV regulations across jurisdictions are also imperative to avoid regulatory fragmentation that could hinder the seamless integration of AVs into transportation networks. Governments and regulatory agencies bear the responsibility not only to establish these standards (Figure 10 [99]) but also to continuously adapt them to match the rapid pace of technological advancements [100]. Therefore, the presence of a clear, robust, and forward-looking legal and regulatory framework is essential for reducing uncertainty, safeguarding public welfare, and cultivating the societal trust necessary for the acceptance and integration of AVs into daily life.
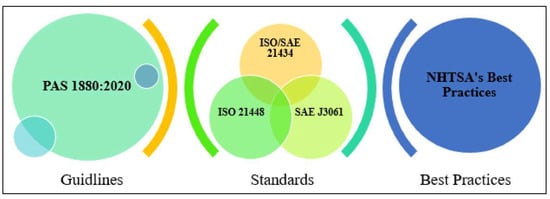
Figure 10.
AV international standards and guidelines (adapted with permission from [99]).
The legal frameworks governing AVs vary significantly across countries. In Finland, for example, AV testing is permitted across all automation levels, provided the testing organization obtains an approved permit [97]. During testing, a driver must be either physically present in the vehicle or capable of remote control if necessary [101]. Similarly, France has authorized AV testing on public roads, but it requires that a driver remains in the vehicle with the ability to disengage automation and assume manual control at any moment [97]. In contrast, Spain has yet to establish specific AV legislation. However, Spain is relatively well positioned for AV integration, as it has not ratified the 1968 UN Vienna Road Traffic Convention, which imposes constraints on vehicle autonomy. Germany began expanding its legal framework to support autonomous driving in 2016, addressing aspects such as safety, liability, cybersecurity, privacy, and infrastructure at the governmental level [101]. Public perceptions of AV safety play a critical role in acceptance, echoing concerns found in previous studies. Research suggests that public adoption is contingent upon AVs achieving a PS level that meets or surpasses that of conventional vehicles [102]. To address these findings, it is crucial to prioritize rigorous testing, robust regulatory frameworks, and transparent communication regarding safety protocols [103]. Improving perceived safety (PS) not only involves enhancing technology’s ability to handle unanticipated scenarios but also demands the development of reliable sensor systems and advanced algorithms capable of making real-time decisions. Additionally, perceptions of control and autonomy play a critical role in influencing public acceptance of autonomous vehicles. While some individuals express unease about ceding control to automated systems and prefer having the ability to override AV functions when necessary [104], others view shared control as an opportunity to enhance mobility, reflecting similar observations in prior studies [105]. Striking an optimal balance between user control and system autonomy requires thoughtful design of human–machine interfaces that foster a sense of user agency while maximizing the benefits of AV technologies. Moreover, these findings indicate that individuals often perceive AVs as personal rather than shared assets, which may limit the potential public health benefits associated with shared autonomous mobility.
3.5. Demographic Segmentation
Demographic segmentation plays a crucial role in shaping the acceptance of AVs, as various population groups demonstrate distinct attitudes, needs, and readiness levels toward adopting this transformative technology. Key demographic factors such as age, gender, income level, education, and geographical location significantly influence perceptions of AVs [95]. Older individuals, for instance, may display greater resistance due to safety concerns, perceived loss of control, and unfamiliarity with autonomous systems. Income level also affects acceptance; individuals in higher income brackets often have greater access to emerging technologies and may adopt AVs earlier, viewing them as a convenience or luxury [106]. In contrast, lower-income groups may express hesitancy due to concerns about affordability, accessibility, and potential job displacement, particularly in sectors like transportation [107]. Education level further impacts AV acceptance, with more educated individuals often showing higher acceptance rates due to increased awareness of AV benefits and functionality [30]. Urban residents, who frequently encounter issues such as traffic congestion and limited parking, are more likely to perceive AVs as a solution for improving mobility and reducing commute-related stress, while rural residents may find AVs less immediately beneficial due to lower traffic density and longer travel distances [22]. A plausible model for AV deployment in rural environments must address the distinct challenges of limited infrastructure, poor connectivity, and unmarked roads [108]. Unlike urban models, rural AVs require robust perception systems—using LiDAR, radar, and cameras—alongside map-light or map-free navigation methods such as SLAM or end-to-end learning. Vehicles must be designed for all-terrain operation and adverse weather, with features like adaptive suspension and reinforced structures [109]. Applications are typically specialized, including agricultural automation, medical deliveries, and rural transport services, best supported through modular fleets or geofenced deployments. Moreover, cultural factors linked to geographic regions also play a role, as acceptance levels vary across countries, with some regions displaying more openness to technological innovation. These demographic differences highlight the importance of tailored AV marketing, educational outreach, and policy strategies to encourage wider acceptance of AV technology [107]. Figure 11 illustrates that women express greater concerns about AVs than men, while younger individuals exhibit more optimism toward AV adoption than older adults [106]. Moreover, most consumers are reluctant to pay a premium for AV technology [45]. Furthermore, individuals from high-income countries tend to have heightened concerns about the security and privacy of AVs compared to those from low-income countries. Prior experience with AVs also increases acceptance levels, drawing individuals toward AV technology.
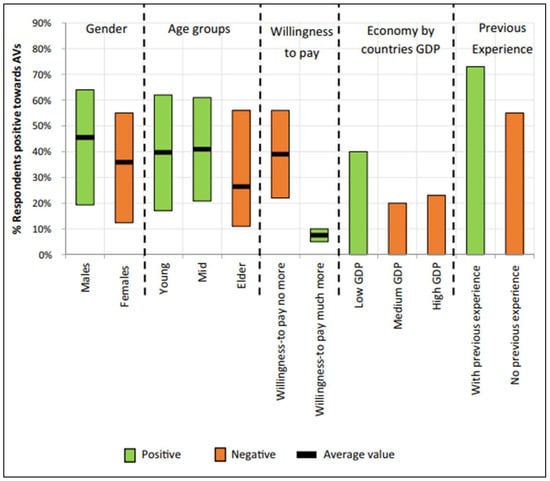
Figure 11.
Public perception and readiness for AVs (adapted from [45]).
Research suggests that around one-third of studies find a greater propensity for younger individuals to adopt shared autonomous vehicles (SAVs), with the likelihood of usage typically decreasing as age increases [110]. Scholars suggest that this trend may be attributed to greater resistance among older generations toward adopting new technologies, as they tend to maintain a strong preference for private vehicle ownership [111]. Although one study reported no significant gender differences in SAV adoption [111], 25.8% of studies reveal that men are more inclined than women to use SAVs [112], while only 7.6% report the opposite [113]. Some researchers argue that these gender differences may stem from cultural influences [114]. Household income as a factor presents mixed results. While most studies identify no significant impact, those that do find an effect revealing a slight trend of wealthier respondents being more receptive to SAV adoption [115]. Regarding educational level, 30.8% of studies suggest that individuals with higher education levels exhibit a greater willingness to use SAVs, likely due to increased awareness of technological advancements [116]. Only one study contradicts this trend [114], with the remaining research finding no significant effect [117]. This trend aligns with the argument that higher education correlates with greater openness to technological innovation [118]. Employment status also appears to modestly influence SAV adoption. It is approximately 25.8% of studies report a positive association, indicating that individuals who are employed, whether part-time, self-employed, or full-time, are somewhat more likely to adopt shared autonomous vehicles (SAVs) compared to those who are unemployed [113]. However, the majority of studies report no effect [119], and a minority even observe a significant negative impact of employment on SAV adoption intentions [120]. Residential location, particularly urban dwelling, is a notable determinant, with nearly 39% of studies finding that urban residents display a stronger intention to use SAVs than those in rural areas [114]. While living or working in a pilot area does not consistently impact SAV adoption intentions, urban residency clearly does, although these findings reflect general trends rather than scientific consensus. Contradictory results exist in a minority of studies, suggesting the need for further research to confirm these tendencies.
4. AV Acceptance in Different Countries
4.1. China: Fast Growing Automatic Driving Technology
In the past decade, China has emerged as a global leader in the development and deployment of autonomous driving technologies, driven by a convergence of governmental support, industrial investment, and academic innovation [121]. A study documented the rise of Chinese tech giants such as Baidu, Tencent, and Huawei in shaping the landscape through large-scale pilot programs and advanced AI algorithms. Baidu’s Apollo project, for instance, represents one of the world’s most ambitious open platforms for autonomous vehicles [122], combining high-definition mapping, vehicle-to-everything (V2X) communication, and real-time decision-making systems. Furthermore, recent research emphasizes the strategic implementation of smart infrastructure in cities like Beijing and Shanghai, where test zones integrate 5G, edge computing, and coordinated traffic systems [123]. Despite these advancements, critical gaps remain in terms of regulatory harmonization, cybersecurity, and the generalizability of Chinese models to international contexts [124]. Moreover, while much of the Western literature focuses on ethical [50,90] and human-centered design principles [54], Chinese studies often prioritize technical performance and deployment scale, highlighting a divergence in research priorities [125]. This review underscores the need for more comparative and cross-cultural analyses in autonomous vehicle research, as the exclusion of China’s rapidly evolving ecosystem presents a significant limitation in the global understanding of the field.
4.2. North America: Innovator and Early Adopter Trends
In North America, specifically in the US and Canada, AV acceptance is significantly shaped by a culture that values innovation and early technology adoption [23]. These regions are the home to numerous pioneering AV companies, including Cruise, Waymo, and Tesla, which lead in the development and testing of AV technologies [35]. Early adopters in North America typically consist of technology enthusiasts drawn to the convenience, safety, and novelty that AVs offer. In addition, government support in states like California and Arizona has fostered regulatory environments that facilitate AV testing and deployment [84]. However, public acceptance remains in flux, influenced by concerns related to safety, liability, and potential job displacement in the transportation industry. The rise in ride-hailing and car-sharing services has further spurred interest in autonomous mobility, especially within urban centers [111]. Nevertheless, the large-scale adoption of AVs in North America hinge on addressing public trust and safety concerns, as well as ensuring that regulatory frameworks adapt to match the pace of technological progress.
4.3. Europe: Balancing Innovation with Regulation
In Europe, the acceptance of AVs is characterized by a cautious approach, with innovation carefully balanced by rigorous regulatory oversight [84]. Leading European states, including France, Germany, and the United Kingdom, have been at the forefront of AV technology development, driven by collaborations between automotive giants such as BMW, Daimler, and Volvo, alongside advanced technology firms [126]. However, European regulatory frameworks place a strong emphasis on safety, data privacy, and ethical considerations, resulting in a slower and more deliberate deployment of AV technology relative to North America [40]. The European Union, along with national governments, has established comprehensive guidelines for AV testing and deployment that prioritize safety and encourage regulatory harmonization across member states [97]. Moreover, public acceptance in Europe is shaped by cultural factors, including a high level of trust in regulatory systems and a preference for public and shared modes of transportation [102]. This balance between innovation and regulatory safeguards has created a structured environment conducive to AV adoption [92], and acceptance is expected to grow as public familiarity with AV benefits increases and regulatory assurances are further reinforced.
4.4. Asia: Technological Leapfrogging and Acceptance Patterns
Asia presents a distinctive landscape for AV acceptance, characterized by rapid technological advancement and varied acceptance patterns across countries [127]. In nations such as Singapore, China, Japan, and South Korea, both government bodies and technology giants have heavily invested in AV technology, integrating it into broader smart city initiatives and future mobility strategies [16]. China, with its expansive market and supportive government policies, has emerged as a global leader in AV innovation, driven by companies like Baidu and Pony.ai, which have developed advanced AV systems [37]. Japan, addressing its aging population, views AVs as a solution to mobility challenges in both urban and rural settings [28]. South Korea, led by companies like Hyundai, has also positioned itself as a significant player in AV development [128]. Public acceptance across Asia varies considerably; urban populations generally exhibit greater openness to AVs due to the potential for reduced congestion and enhanced mobility in large metropolitan areas [28]. Figure 12 illustrates the country-level intercepts for each outcome in a multilevel structural equation model, capturing the contextual influence of each nation on individual awareness and perceptions of AVs, independent of personal characteristics [129]. The analysis indicates that while individual characteristics account for most of the variance in AV awareness and perceptions of AV safety, there remain small but statistically significant differences among countries after controlling for individual-level factors. Rural regions and countries with less developed infrastructure, however, encounter more challenges with AV acceptance. Asia’s capacity for technological leapfrogging, supported by proactive government initiatives, is accelerating AV adoption. Nonetheless, challenges related to infrastructure, regulatory standards, and cultural perceptions of automation persist and must be addressed for widespread AV integration.
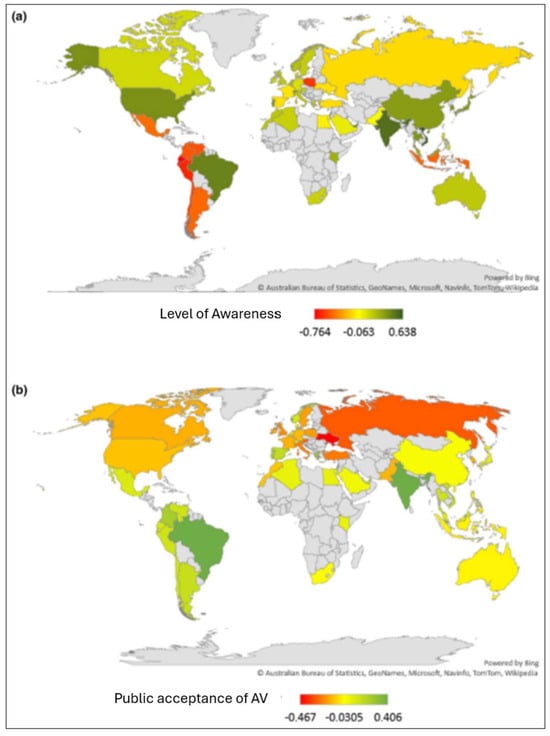
Figure 12.
AV awareness and readiness score for acceptance in different countries (adapted with permission from [129]).
4.5. Economic Considerations
Economic considerations play a critical role in the acceptance of AVs, as both individual consumers and industries evaluate the cost–benefit aspects of this transformative technology [107]. For individual consumers, the high initial costs associated with AV ownership represent a substantial barrier, particularly in comparison to conventional vehicles [84]. The expensive components required for AV functionality such as advanced sensors, AI systems, and specialized software render AVs less accessible to the average consumer, thus limiting their widespread adoption [40]. Proponents contend that the initial costs of AVs could be mitigated over time by savings on fuel, insurance, and maintenance. It is anticipated that AVs will not only lower the incidence of accidents but also enhance fuel efficiency and reduce vehicle wear by optimizing driving behaviors [18]. For businesses, particularly in logistics, ride-sharing, and public transportation, AVs offer significant economic advantages by reducing labor costs, minimizing human error, and enhancing operational efficiency [118]. Autonomous fleets can operate continuously without rest, thereby increasing productivity and shortening delivery times [130]. Furthermore, as AV technology advances, economies of scale may eventually lower production costs, potentially making AVs more affordable in the future. Governments also face economic considerations, as supporting AV adoption often requires substantial infrastructure investments, such as building smart roads and upgrading communication networks [131]. While economic challenges remain, the long-term potential for cost savings and efficiency gains is a powerful driver of AV acceptance and integration within both consumer and industrial sectors.
Research demonstrates that AV acceptance is shaped by a range of factors, including demographic characteristics, personality traits, attitudes, and social influences [64,132]. Demographic factors, such as age, gender, income, and driving frequency, are widely studied in relation to AV acceptance [31,64]. Younger and male drivers show a greater willingness to accept and purchase AVs [9,133]. Higher income and urban residency are also associated with increased intentions to use AVs, as are individuals who drive frequently and express a willingness to invest more in AV technology [96,134]. Personality traits significantly influence AV acceptance as well [135]. Sensation-seeking behavior and a propensity for innovation have been found to have a direct, positive influence on the acceptance of autonomous vehicles (AVs) [64]. In contrast, personality traits such as openness and extraversion indirectly impact AV acceptance by fostering higher levels of trust [47]. Attitudes toward AVs are also critical determinants, with individuals who hold positive views of AVs being more likely to adopt them, as trust in the technology correlates with higher acceptance levels [114]. On the other hand, negative expectations, such as skepticism toward autonomous shared taxis, can diminish behavioral intentions (BIs) by reducing perceived ease of use (PEOU) [114]. Social factors further shape AV acceptance, as studies indicate that social influence (SI) positively impacts perceived usefulness (PU) and, through this mechanism, indirectly strengthens the intention to use AVs [136]. This pattern is also observed in the context of autonomous electric buses, where SI plays a direct role in enhancing AV acceptance [114,135]. Furthermore, familiarity with AV technology is a crucial factor, as individuals with limited exposure tend to associate AVs with safety concerns [137]. Past experiences with in-vehicle technologies significantly influence AV acceptance; individuals who have had positive experiences with such technologies generally report higher trust levels and are more inclined to adopt AVs [37,138].
5. Shaping the Future of Autonomous Mobility
The acceptance of AVs varies significantly between urban and rural settings, shaped by distinct mobility needs and infrastructure disparities [139]. In urban areas, where challenges such as traffic congestion, pollution [19], and limited parking are prevalent, AVs are perceived as transformative tools for streamlining transportation, reducing traffic, and enhancing overall mobility efficiency [89]. High population densities in cities make shared autonomous transportation models particularly viable, and AV technology is often integrated into broader sustainability objectives within smart city initiatives [119]. Urban residents, who are generally more exposed to technological advancements, are likely to be early adopters of AVs, especially due to the potential improvements in commuting experiences they offer [116]. Conversely, AV adoption in rural areas faces different dynamics. The spread of AVs is slower in these regions, primarily due to lower population density, longer travel distances, and less developed infrastructure [22]. Rural residents may perceive fewer immediate benefits from AVs, as public transit options are limited, and personal vehicles remain practical and reliable. Table 2 summarizes the AV acceptance differences between countries and regions.
Table 2.
A summary focused on the AV acceptance differences between countries and regions.
Furthermore, the high cost of AV technology, along with concerns about its adaptability to rural road conditions and complex environmental factors, contributes to hesitancy in these regions [84]. Consequently, urban areas are expected to lead in shaping autonomous mobility trends, while rural acceptance will rely on the development of AV solutions that are more adaptable, cost-effective, and resilient. Figure 13 presents a montage of the AV Hype Cycle over recent years [148]. AVs reached peak hype in 2015 but soon entered a phase of disillusionment as doubts emerged regarding their effectiveness in addressing urban transportation issues. A key challenge is AVs’ potential impact on congestion; it remains uncertain whether AV fleets will alleviate or exacerbate urban traffic [148]. Recent studies underscore the role of urban rail systems in efficiently transporting large populations, suggesting that AVs alone may be insufficient for meeting urban mobility needs. High-occupancy vehicles, inherent to public transit, offer a space-efficient solution critical in densely populated cities.
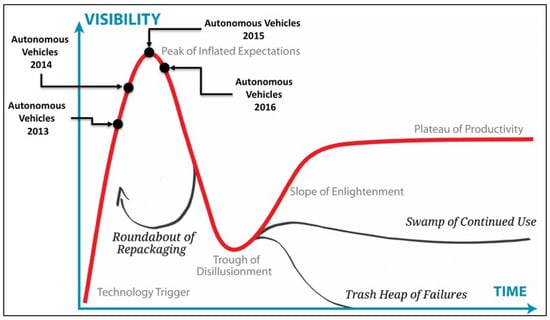
Figure 13.
AV technologies and their progress along the hype curve (adapted with permission from [148]).
Integrating AVs into public transit systems represents a pivotal step in shaping the future of mobility, with profound implications for public acceptance [113]. Autonomous buses, shuttles, and ride-sharing services offer the potential to transform public transportation by increasing efficiency, reducing operational costs, and improving accessibility [117]. By minimizing human error, optimizing routes in real time, and providing dependable service, AVs could address existing gaps in transit infrastructure [7]. However, public acceptance largely depends on trust in the technology’s capacity to navigate safely within complex urban environments and integrate seamlessly with traditional modes of transportation [139]. A key challenge in gaining acceptance is addressing public skepticism around safety, particularly the interaction of AVs with pedestrians, cyclists, and other vehicles in congested urban settings [105]. Ensuring equitable access is also essential, particularly for individuals with disabilities and those in underserved communities [71]. To foster trust, public transit authorities must prioritize effective risk communication and demonstrate AV system reliability through carefully structured pilot programs and phased rollouts [22]. With increased public confidence, AVs could become a cornerstone of modern public transit, contributing to reduced congestion, lower emissions, and enhanced urban mobility. Moreover, Figure 14 lists the expected advancement in AV service in the future.
Figure 14.
Expected advancement in AV service in the future.
It is clear to emphasis that there are many existing discourses on AVs, focusing on their potential to reduce congestion, improve safety, and enhance mobility; these projections need to be more carefully examined. For instance, the notion that AVs will reduce congestion is not necessarily assured. If AVs become predominantly privately owned, they could increase road usage as individuals may be more inclined to use them for convenience, potentially worsening traffic congestion. Additionally, the promise of improved mobility for low-mobility travelers is uncertain. If mobility services are largely privatized, there is a risk that those in need may not be able to access or afford these services, thus limiting their benefits. The safety and accessibility of non-motorized travelers, such as pedestrians and cyclists, are also significant concerns. As AVs become integrated into urban infrastructure, there may be inadequate consideration of these vulnerable groups, leading to their marginalization from public spaces. Moreover, the widespread adoption of AVs could inadvertently encourage urban sprawl, reducing social cohesion and community identity. If AVs make it easier for people to live farther from city centers, this could result in more isolated communities and a diminished sense of local connection. These uncertainties underscore the need for a more nuanced approach to AV policy that goes beyond technological optimism, ensuring that the social, economic, and environmental impacts are fully understood and addressed.
Autonomous fleets and logistics services are set to transform the transportation landscape, bringing substantial economic, operational, and environmental benefits that are likely to impact acceptance among industries and the public alike [118]. Autonomous fleets the encompassing delivery trucks, taxis, and shared vehicle services—offer the potential to streamline logistics through route optimization, reduced fuel consumption, and minimized labor costs [113,115]. Major companies such as Uber, Waymo, Toyota, Ford, and Tesla are actively investing in AV technologies to enhance the efficiency of last-mile delivery and freight transportation [25]. The strategic positioning of AV companies based on market execution is further illustrated in [149]. The deployment of autonomous fleets addresses the rising demand for faster, more reliable deliveries while alleviating driver shortages and reducing operational risks related to human error [150]. However, acceptance of autonomous logistics hinges on resolving concerns around job displacement, as the automation of driving roles presents significant social and economic challenges [151]. Moreover, ensuring the cybersecurity and dependability of these systems is essential to securing trust from businesses and consumers alike [152]. Environmental sustainability also drives interest in autonomous fleets, as electric or hybrid AVs can reduce emissions, aligning with corporate sustainability goals [114].
In addition, the distinction between freight and passenger vehicles is indeed crucial, as their adoption and integration into transportation systems are likely to follow divergent trajectories. While both categories benefit from advances in autonomous vehicle technology, the regulatory frameworks, infrastructure needs, and user acceptance processes vary significantly [153]. Freight vehicles, for instance, are primarily concerned with efficiency, payload capacity, and operational continuity, demanding specialized regulations for commercial use, safety standards, and driver-hour limitations [154]. In contrast, passenger vehicles emphasize user experience, comfort, and personal safety, leading to different regulatory and psychological considerations, particularly regarding trust and perceived risk [155]. Psychological factors influencing adoption also differ; for passengers, trust is often linked to perceived safety and control, while for freight operators, economic incentives, such as cost savings and operational efficiency, play a more prominent role [84]. As such, the need for distinct approaches in both regulatory structures and societal integration strategies is evident, as failure to address these differences could hinder widespread adoption and optimal utilization of each vehicle category [156]. In conclusion, as AV adoption in logistics accelerates, the technology’s capacity to meet expectations for efficiency, safety, and environmental responsibility will play a pivotal role in shaping the future of autonomous mobility.
6. Typical Perceived Risks
Perceived risks are fundamental in shaping public acceptance of AVs, as they reflect users’ concerns regarding potential drawbacks and uncertainties tied to this emerging technology [81]. Foremost among these concerns are safety risks, encompassing fears of accidents or system failures that could result in physical harm [39]. Users frequently question the reliability of AVs in managing complex driving scenarios, such as navigating severe weather conditions or reacting to unpredictable human drivers, which can greatly influence their willingness to adopt the technology [1]. Privacy and security risks also present significant concerns, given that AVs depend on extensive data collection and real-time communication with external systems [49]. Apprehensions regarding data breaches, hacking, and unauthorized access to personal or vehicle-related information are heightened in light of the growing prevalence of cyber threats in today’s digital infrastructure [40]. Performance risks the possibility that AVs may not function as expected across various conditions—further undermining user trust [157]. This performance risk includes potential technical malfunctions, which may prevent AVs from meeting user expectations or delivering anticipated benefits [135,158,159,160]. Some researchers define performance risk as the risk associated with system reliability, which remains a persistent concern despite technological advances [161]. Privacy concerns specifically relate to the potential misuse or disclosure of personal, behavioral, or travel data, where data breaches may lead to a loss of privacy and data protection [135,161]. Users are particularly concerned with the transmission of travel and behavioral data, fearing they may be tracked or misused [28,67]. Collectively, these perceived risks—spanning safety, performance, and data security—create a complex landscape of apprehensions that profoundly shape public acceptance. Addressing these concerns will require targeted risk communication, greater system transparency, and robust regulatory frameworks to alleviate user skepticism and build trust in AV technology.
In contrast to other fields of automation and digital environments, where risk dimensions are frequently differentiated, this level of detailed examination has not been widely adopted in studies of AV acceptance [162]. Similar to research on trust, research on perceived risk in AV contexts often approach risk as a single, unified construct, with relatively few investigations isolating different risk types to assess their distinct impacts [81]. While some researchers identify up to five categories of risk associated with AV use, the majority of studies focus primarily on two or three dimensions, typically security/privacy risks, safety risks, and performance risks, with performance risks frequently overlapping with safety concerns [67,163]. A study demonstrated that perceived risk directly influences AV acceptance, with lower risk perceptions correlating with higher acceptance levels [61]. It has been established that perceived risk reduces individuals’ intentions to use AVs, suggesting that users with lower risk perceptions are more inclined to adopt the technology [164]. Moreover, research indicates that intention to use AVs is negatively impacted by perceived risk, as higher risk perceptions significantly decrease willingness to adopt AV technology [130,159]. However, findings in this area are not entirely consistent, as some findings report no association between perceived risk and intention to use AVs [81].
Safety risk in the context of AVs pertains to the extent to which a system can protect users [158]. It encompasses the risk associated with entrusting user safety to an automated system, as well as the potential risks to the AV user’s own safety, sometimes referred to as security risk [159]. This type of risk is frequently perceived as a potential adverse outcome affecting one’s quality of life. A significant body of research highlights security risks as a critical barrier to the adoption of autonomous vehicles (AVs), with equipment malfunctions being frequently identified as a major source of concern [165]. This risk is inherently linked to performance-related risks, as failures in either mechanical components or software systems could jeopardize user safety by shifting control to the autonomous system, potentially leading to dangerous situations [59]. Although many studies approach perceived risk as a single-dimensional construct, research that distinguishes between various risk types remains limited and presents mixed findings. Some researchers have separated PS risk from privacy risk, finding that only safety risk had an indirect effect on BI [67]. Similarly, another study measured these distinct risks and reported comparable outcomes [166]. A further distinction was made between apparent AV recital risk and security/privacy risk, revealing a significant indirect relationship between both risk types and BI [163]. Adopting a broader framework, a study examined the indirect effects of five different risk types, concluding that performance and safety risks significantly influenced BI, whereas privacy, socio-psychological, and financial risks showed no significant impact [135].
7. Trends, Implications, Barriers and Opportunities, and Strategic Roadmaps
The rapid advancement of AV technology is pivotal in shaping public acceptance, as improvements in artificial intelligence, machine learning, sensors, and vehicle-to-everything (V2X) communication significantly enhance AV safety, reliability, and efficiency [32,102]. Innovations in perception systems, such as radar and advanced camera technologies, equip AVs with the capability to navigate complex environments with high precision, thereby reducing accident risks and bolstering user trust [43]. Additionally, breakthroughs in AI algorithms allow AVs to make accurate, real-time decisions, effectively adapting to unpredictable road conditions and human behaviors [98]. These technological advancements are crucial in addressing public concerns surrounding safety, performance, and reliability, which remain substantial barriers to AV acceptance [84]. The convergence of autonomous technology with electric vehicles also presents opportunities to transform sustainable mobility, appealing particularly to environmentally conscious consumers [119]. As AV technologies become more sophisticated, user experiences will improve, potentially driving broader public acceptance [98]. Ultimately, public perception of AVs is closely tied to the visible, real-world demonstration of these advancements, underscoring the importance of extensive testing, transparency, and effective communication regarding the benefits of AV technology.
In emerging markets, AV acceptance faces considerable challenges but also presents significant opportunities [84]. Countries across Africa, Latin America, and Southeast Asia often lack the infrastructure and regulatory frameworks essential for supporting widespread AV deployment [167]. Moreover, economic constraints, such as lower disposable incomes and limited access to advanced technology, contribute to slower adoption rates. Nevertheless, these markets offer unique prospects for AV integration, particularly in addressing mobility challenges within densely populated urban areas or regions with insufficient public transportation [78]. In locations with underdeveloped transportation infrastructure, AVs could provide a technological leap, reducing the need for substantial investments in conventional transit systems [168]. Success in these markets will depend on developing AV solutions that are both affordable and tailored to local needs. Furthermore, partnerships between global AV firms [35] and local governments could stimulate the growth of autonomous mobility, especially in logistics and public transportation [119]. Although barriers to AV adoption in emerging markets are considerable, the potential to address critical mobility challenges represents a promising opportunity for AV developers and policymakers alike.
The advancement of AV technology presents both strategic opportunities and challenges for industry leaders and policymakers, whose decisions will play a crucial role in determining the pace of AV adoption [119]. For industry leaders, the ability to harness AV technology for enhanced operational efficiency, cost reduction, and competitive advantage is paramount [120]. Companies in sectors such as automotive manufacturing, logistics, ride-sharing, and urban mobility must adapt to shifting market dynamics, including evolving consumer expectations and the increasing demand for sustainable transportation options [131]. Strategic investments in AV research, partnerships with technology firms, and pilot projects are essential for securing leadership in this rapidly evolving sector [63]. Policymakers, meanwhile, play a critical role in establishing regulatory frameworks that prioritize safety, foster innovation, and address public concerns [42]. Developing standardized safety protocols, liability regulations, and ethical guidelines for AV operations is essential for building public trust and encouraging investment [169]. Moreover, policymakers must address broader societal impacts, including the potential displacement of jobs in driving-related sectors and the need for reskilling programs to support affected workers [49]. Collaboration between industry leaders and policymakers is essential to develop long-term strategies that balance innovation with public welfare, facilitating a seamless transition to widespread AV integration. Ethical considerations, such as AV decision-making in unavoidable accident scenarios and potential job displacement in driving-related fields, add further complexity to this societal shift (Figure 15).
Figure 15.
Current challenges preventing the widespread adoption of AVs.
Accelerating the adoption of AVs requires a comprehensive roadmap that addresses technological, regulatory, and social considerations [169]. This roadmap should begin with pilot programs and real-world testing to validate the safety and reliability of AV systems, helping to build public trust while generating valuable data for ongoing enhancements [157,163]. Collaboration between industry and government is crucial in this phase, as both sectors share responsibility for developing supportive infrastructure, such as sensor-enabled roads and advanced communication networks essential for AV operations [131]. As AV technology advances, regulatory frameworks must adapt, establishing flexible yet robust guidelines that promote innovation while addressing critical concerns related to safety, data privacy, and cybersecurity [40,42]. Public outreach and education initiatives are also integral to this roadmap, as they can demystify AV technology and emphasize its benefits, such as reducing traffic accidents, lowering emissions, and improving mobility for underserved communities [152]. Figure 16 exhibits the future of AV technology, which holds great promise, with ongoing research and development targeting both technical improvements and broader societal integration. Moreover, incentive programs, including tax credits, subsidies, or grants, can encourage early adoption, especially among fleet operators and ride-sharing services, which are well positioned to lead in AV integration [170]. By strategically addressing these areas, a well-structured roadmap for AV adoption can facilitate a smoother transition, strengthen public confidence, and ultimately foster widespread AV use.
Figure 16.
Future of AV technology holds great promise, with ongoing research and development targeting both technical improvements and broader societal integration.
8. Conclusions
This review has explored the intricate landscape of public acceptance for AVs, dissecting the complex web of psychological, social, regulatory, and technological factors that contribute to both enthusiasm and skepticism surrounding AV adoption. The findings underscore that while AV technology continues to evolve at a rapid pace, public acceptance remains tightly interwoven with deeper issues of trust, PS, and societal influence, factors that vary significantly across demographic, cultural, and regional lines. A clear theme emerges: the journey toward widespread AV acceptance cannot rely solely on technological breakthroughs. Rather, it demands a balanced and collaborative approach that integrates robust cybersecurity measures, clear legal frameworks, thoughtful user interface design, and proactive engagement with public concerns. North America, Europe, and Asia, among other regions, each face unique challenges and opportunities; a universal approach will be insufficient to meet their diverse expectations and regulatory landscapes. Instead, localized strategies, tailored to address region-specific economic conditions and cultural attitudes, will be pivotal in gaining public trust.
This review not only highlights existing barriers but also maps out actionable paths forward. By proposing strategic roadmaps and policy implications, this study calls on industry leaders, policymakers, and academic researchers to foster environments conducive to both technological progress and societal acceptance. Key recommendations include reinforcing cybersecurity protocols, ensuring transparency in legal frameworks, and engaging in continuous dialogue with the public through targeted educational and media campaigns. As AVs inch closer to becoming mainstream, the insights presented here aim to serve as a guiding compass for future research and innovation. This study lays a foundation for understanding the multifaceted public perceptions of AVs and emphasizes the importance of aligning technological progress with human-centric design and governance. Through sustained commitment to addressing public concerns and nurturing trust, the transformative potential of AVs can be fully realized, paving the way for a future of safe, accessible, and widely accepted autonomous mobility.
A key limitation of this study is its focus on recent trends in the public acceptance of AVs, which may not fully capture the long-term evolution of public attitudes. By concentrating on recent developments, the review may overlook deeper, slower-changing factors such as cultural norms and regulatory progress. Given the dynamic nature of AV technology and public opinion, future research should incorporate longitudinal approaches to provide a more comprehensive and lasting understanding of acceptance patterns. Based on the major findings of this study, several recommendations for future research are suggested as follows:
- -
- To investigate how public acceptance of autonomous vehicles evolves over time as technology advances and real-world deployments occur.
- -
- To conduct comparative studies across regions to understand cultural influences on AV acceptance and resistance.
- -
- To explore how varying legal frameworks affect public trust and the adoption of autonomous vehicles.
- -
- To investigate public views on the ethical dilemmas posed by autonomous driving, such as decision-making in critical situations.
- -
- To study the broader effects of AV adoption on employment, transportation equity, and urban infrastructure.
Funding
The authors extend their appreciation to Prince Sattam bin Abdulaziz University for funding this research work through the project number (PSAU/2023/01/26939).
Acknowledgments
The author acknowledge the continues support from the Prince Sattam bin Abdulaziz University, Saudi Arabia.
Conflicts of Interest
The author declares no conflict of interest.
References
- Pappalardo, G.; Caponetto, R.; Varrica, R.; Cafiso, S. Assessing the operational design domain of lane support system for automated vehicles in different weather and road conditions. J. Traffic Transp. Eng. (Engl. Ed.) 2022, 9, 631–644. [Google Scholar] [CrossRef]
- Barberi, S.; Arena, F.; Termine, F.; Canale, A.; Olayode, I.O.; Zuccalà, Y. BIM applied to intelligent transport systems. AIP Conf. Proc. 2022, 2611, 060011. [Google Scholar] [CrossRef]
- Alex, F.J.; Tan, G.; Kyei, S.K.; Ansah, P.O.; Agyeman, P.K.; Fayzullayevich, J.V.; Olayode, I.O. Transmission of viruses and other pathogenic microorganisms via road dust: Emissions, characterization, health risks, and mitigation measures. Atmos. Pollut. Res. 2023, 14, 101642. [Google Scholar] [CrossRef]
- Ji, W.; Yuan, Q.; Cheng, G.; Yu, S.; Wang, M.; Shen, Z.; Yang, T. Traffic accidents of autonomous vehicles based on knowledge mapping: A review. J. Traffic Transp. Eng. (Engl. Ed.) 2023, 10, 1061–1073. [Google Scholar] [CrossRef]
- Ukaegbu, U.F.; Tartibu, L.K.; Okwu, M.O.; Olayode, I.O. Integrating Unmanned Aerial Vehicle and Deep Learning Algorithm for Pipeline Monitoring and Inspection in the Oil and Gas Sector. In Proceedings of the International Conference on Artificial Intelligence and Its Applications, Virtual, 20–21 May 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Mattas, K.; Botzoris, G.; Papadopoulos, B. Safety aware fuzzy longitudinal controller for automated vehicles. J. Traffic Transp. Eng. (Engl. Ed.) 2021, 8, 568–581. [Google Scholar] [CrossRef]
- Stead, D.; Vaddadi, B. Automated vehicles and how they may affect urban form: A review of recent scenario studies. Cities 2019, 92, 125–133. [Google Scholar] [CrossRef]
- Yao, Q.; Tian, Y.; Wang, Q.; Wang, S. Control Strategies on Path Tracking for Autonomous Vehicle: State of the Art and Future Challenges. IEEE Access 2020, 8, 161211–161222. [Google Scholar] [CrossRef]
- Laub, J.A. Assessing the Servant Organization; Development of the Organizational Leadership Assessment (OLA) Model. Dissertation Abstracts International. Procedia-Soc. Behav. Sci. 1999, 1, 1–10. Available online: https://olagroup.com/Images/mmDocument/Laub%20Dissertation%20Complete%2099.pdf (accessed on 3 September 2024).
- Wang, C.; Xie, Y.; Huang, H.; Liu, P. A review of surrogate safety measures and their applications in connected and automated vehicles safety modeling. Accid. Anal. Prev. 2021, 157, 106157. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, W.; Zhang, Y.; Xu, J. A bibliometric review on stability and reinforcement of special soil subgrade based on CiteSpace. J. Traffic Transp. Eng. (Engl. Ed.) 2022, 9, 223–243. [Google Scholar] [CrossRef]
- Shen, Z.; Ji, W.; Yu, S.; Cheng, G.; Yuan, Q.; Han, Z.; Liu, H.; Yang, T. Mapping the knowledge of traffic collision Reconstruction: A scientometric analysis in CiteSpace, VOSviewer, and SciMAT. Sci. Justice 2023, 63, 19–37. [Google Scholar] [CrossRef]
- Pendleton, S.D.; Andersen, H.; Du, X.; Shen, X.; Meghjani, M.; Eng, Y.H.; Rus, D.; Ang, M.H. Perception, planning, control, and coordination for autonomous vehicles. Machines 2017, 5, 6. [Google Scholar] [CrossRef]
- Chowdhury, A.; Karmakar, G.; Kamruzzaman, J.; Jolfaei, A.; Das, R. Attacks on self-driving cars and their countermeasures: A survey. IEEE Access 2020, 8, 207308–207342. [Google Scholar] [CrossRef]
- Shladover, S.E. Connected and automated vehicle systems: Introduction and overview. J. Intell. Transp. Syst. Technol. Plan. Oper. 2018, 22, 190–200. [Google Scholar] [CrossRef]
- Miskolczi, M.; Földes, D.; Munkácsy, A.; Jászberényi, M. Urban mobility scenarios until the 2030s. Sustain. Cities Soc. 2021, 72, 103029. [Google Scholar] [CrossRef]
- Stilgoe, J.; Cohen, T. Rejecting acceptance: Learning from public dialogue on self-driving vehicles. Sci. Public Policy 2021, 48, 849–859. [Google Scholar] [CrossRef]
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning. Transp. Res. Board Annu. Meet. 2014, 42, 36–42. [Google Scholar] [CrossRef]
- Piao, J.; McDonald, M.; Hounsell, N.; Graindorge, M.; Graindorge, T.; Malhene, N. Public Views towards Implementation of Automated Vehicles in Urban Areas. Transp. Res. Procedia 2016, 14, 2168–2177. [Google Scholar] [CrossRef]
- Choi, J.K.; Ji, Y.G. Investigating the Importance of Trust on Adopting an Autonomous Vehicle. Int. J. Hum. Comput. Interact. 2015, 31, 692–702. [Google Scholar] [CrossRef]
- Verberne, F.M.F.; Ham, J.; Midden, C.J.H. Trust in smart systems: Sharing driving goals and giving information to increase trustworthiness and acceptability of smart systems in cars. Hum. Factors 2012, 54, 799–810. [Google Scholar] [CrossRef]
- Eltved, M. Modelling Passenger Behaviour in Mixed Scheduleand Frequency-Based Public Transport Systems. Sustainability 2022, 4, 1–17. Available online: https://orbit.dtu.dk/en/publications/modelling-passenger-behaviour-in-mixed-scheduleand-frequency-base (accessed on 19 February 2025).
- Casley, S.V.; Jardim, A.S.; Quartulli, A.M. A Study of Public Acceptance of Autonomous Cars. Bachelor’s Thesis, Worcester Polytechnic Institute, Worcester, MA, USA, 2013; pp. 1–146. Available online: https://web.wpi.edu/Pubs/E-project/Available/E-project-043013-155601/unrestricted/A_Study_of_Public_Acceptance_of_Autonomous_Cars.pdf (accessed on 9 September 2024).
- Lee, J.; Chang, H.; Park, Y. Il Influencing factors on social acceptance of autonomous vehicles and policy implications. In Proceedings of the PICMET 2018—Portland International Conference on Management of Engineering and Technology: Managing Technological Entrepreneurship: The Engine for Economic Growth, Proceedings, Honolulu, HI, USA, 19–23 August 2018. [Google Scholar] [CrossRef]
- Zmud, J.P.; Sener, I.N. Towards an Understanding of the Travel Behavior Impact of Autonomous Vehicles. Transp. Res. Procedia 2017, 25, 2500–2519. [Google Scholar] [CrossRef]
- McGehee, D.V.; Brewer, M.; Schwarz, C.; Smith, B.W.; University of Iowa, I.C.; Transportation, I.D.; Administration, F.H. Review of Automated Vehicle Technology: Policy and Implementation Implications; University of Iowa: Iowa City, IA, USA, 2015; 41p. Available online: https://rosap.ntl.bts.gov/view/dot/30702 (accessed on 10 September 2024).
- Nordhoff, S.; De Winter, J.; Kyriakidis, M.; Van Arem, B.; Happee, R. Acceptance of Driverless Vehicles: Results from a Large Cross-National Questionnaire Study. J. Adv. Transp. 2018, 2018, 5382192. [Google Scholar] [CrossRef]
- Schoettle, B.; Sivak, M. Public Opinion about Self-Driving Vehicles in China, India, Japan, the U.S., the U.K., and Australia; University of Michigan, Transportation Research Institute: Ann Arbor, MI, USA; Available online: https://deepblue.lib.umich.edu/bitstream/handle/2027.42/109433/103139.pdf?sequence=1&isAllowed=y (accessed on 10 September 2024).
- Merat, N.; De Waard, D. Human factors implications of vehicle automation: Current understanding and future directions. Transp. Res. Part F Traffic Psychol. Behav. 2014, 27, 193–195. [Google Scholar] [CrossRef]
- Liu, H.; Yang, R.; Wang, L.; Liu, P. Evaluating Initial Public Acceptance of Highly and Fully Autonomous Vehicles. Int. J. Hum. Comput. Interact. 2019, 35, 919–931. [Google Scholar] [CrossRef]
- Du, X.; Shen, Y.; Chang, R.; Ma, J. The exceptionists of Chinese roads: The effect of road situations and ethical positions on driver aggression. Transp. Res. Part F Traffic Psychol. Behav. 2018, 58, 719–729. [Google Scholar] [CrossRef]
- Varghese, J.Z.; Boone, R.G. Overview of Autonomous Vehicle Sensors and Systems. In Proceedings of the 2015 International Conference on Operations Excellence and Service Engineering, Orlando, FL, USA, 10–11 September 2015; pp. 178–191. [Google Scholar]
- Lyalina, B.T. AI-Based Systems for Autonomous Vehicle Nighttime Safety and Navigation. J. Artif. Intell. Res. Appl. 2023, 3, 82–103. [Google Scholar]
- Hakak, S.; Gadekallu, T.R.; Maddikunta, P.K.R.; Ramu, S.P.; M, P.; De Alwis, C.; Liyanage, M. Autonomous vehicles in 5G and beyond: A survey. Veh. Commun. 2023, 39, 100551. [Google Scholar] [CrossRef]
- Dikmen, M.; Burns, C.M. Autonomous Driving in the Real World: Experiences with Tesla Autopilot and Summon. In Proceedings of the Automotive UI 2016—8th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, Proceedings, Ann Arbor, MI, USA, 24–26 October 2016; Volume 2016, pp. 225–228. [Google Scholar] [CrossRef]
- Liu, P.; Xu, Z.; Zhao, X. Road tests of self-driving vehicles: Affective and cognitive pathways in acceptance formation. Transp. Res. Part A Policy Pract. 2019, 124, 354–369. [Google Scholar] [CrossRef]
- Dai, J.; Li, R.; Liu, Z.; Lin, S. Impacts of the introduction of autonomous taxi on travel behaviors of the experienced user: Evidence from a one-year paid taxi service in Guangzhou, China. Transp. Res. Part C Emerg. Technol. 2021, 130, 103311. [Google Scholar] [CrossRef]
- Mo, E.; Asia, D. The Current State and Future of Autonomous Driving Technology; DigiTimes Inc.: Taipei, Taiwan, 2023; Available online: https://www.digitimes.com/news/a20231121PR201/autonomous-driving-av-tesla-waymo.html (accessed on 19 February 2025).
- Zolfagharian, S.; Irizarry, J.; Ressang, A.; Nourbakhsh, M.; Gheisari, M. Automated safety planning approach for residential construction sites in Malaysia. Int. J. Constr. Manag. 2014, 14, 134–147. [Google Scholar] [CrossRef]
- Giannaros, A.; Karras, A.; Theodorakopoulos, L.; Karras, C.; Kranias, P.; Schizas, N.; Kalogeratos, G.; Tsolis, D. Autonomous Vehicles: Sophisticated Attacks, Safety Issues, Challenges, Open Topics, Blockchain, and Future Directions. J. Cybersecur. Priv. 2023, 3, 493–543. [Google Scholar] [CrossRef]
- Chen, S.; Zong, S.; Chen, T.; Huang, Z.; Chen, Y.; Labi, S. A Taxonomy for Autonomous Vehicles Considering Ambient Road Infrastructure. Sustainability 2023, 15, 258. [Google Scholar] [CrossRef]
- Sever, T.; Contissa, G. Automated driving regulations–Where are we now? Transp. Res. Interdiscip. Perspect. 2024, 24, 101033. [Google Scholar] [CrossRef]
- Adnan Yusuf, S.; Khan, A.; Souissi, R. Vehicle-to-everything (V2X) in the autonomous vehicles domain–A technical review of communication, sensor, and AI technologies for road user safety. Transp. Res. Interdiscip. Perspect. 2024, 23, 100980. [Google Scholar] [CrossRef]
- Othman, K. Public acceptance and perception of autonomous vehicles: A comprehensive review. AI Ethics 2021, 1, 355–387. [Google Scholar] [CrossRef]
- Othman, K. Exploring the implications of autonomous vehicles: A comprehensive review. Innov. Infrastruct. Solut. 2022, 7, 165. [Google Scholar] [CrossRef]
- Nastjuk, I.; Herrenkind, B.; Marrone, M.; Brendel, A.B.; Kolbe, L.M. What drives the acceptance of autonomous driving? An investigation of acceptance factors from an end-user’s perspective. Technol. Forecast. Soc. Change 2020, 161, 120319. [Google Scholar] [CrossRef]
- Wilson, K.M.; Yang, S.; Roady, T.; Kuo, J.; Lenné, M.G. Driver trust & mode confusion in an on-road study of level-2 automated vehicle technology. Saf. Sci. 2020, 130, 104845. [Google Scholar] [CrossRef]
- Lyons, J.B.; Koltai, K.S.; Ho, N.T.; Johnson, W.B.; Smith, D.E.; Shively, R.J. Engineering Trust in Complex Automated Systems. Ergon. Des. 2016, 24, 13–17. [Google Scholar] [CrossRef]
- Taeihagh, A.; Lim, H.S.M. Governing autonomous vehicles: Emerging responses for safety, liability, privacy, cybersecurity, and industry risks. Transp. Rev. 2019, 39, 103–128. [Google Scholar] [CrossRef]
- Papadimitriou, E.; Farah, H.; van de Kaa, G.; Santoni de Sio, F.; Hagenzieker, M.; van Gelder, P. Towards common ethical and safe ‘behaviour’ standards for automated vehicles. Accid. Anal. Prev. 2022, 174, 106724. [Google Scholar] [CrossRef] [PubMed]
- Kumar, A. Exploring Ethical Considerations in AI-driven Autonomous Vehicles: Balancing Safety and Privacy. J. Artif. Intell. Gen. Sci. ISSN3006-4023 2024, 2, 125–138. [Google Scholar] [CrossRef]
- Krügel, S.; Uhl, M. The risk ethics of autonomous vehicles: An empirical approach. Sci. Rep. 2024, 14, 960. [Google Scholar] [CrossRef]
- Durlik, I.; Miller, T.; Kostecka, E.; Zwierzewicz, Z.; Łobodzińska, A. Cybersecurity in Autonomous Vehicles—Are We Ready for the Challenge? Electronics 2024, 13, 2654. [Google Scholar] [CrossRef]
- Detjen, H.; Faltaous, S.; Pfleging, B.; Geisler, S.; Schneegass, S. How to Increase Automated Vehicles’ Acceptance through In-Vehicle Interaction Design: A Review. Int. J. Hum. Comput. Interact. 2021, 37, 308–330. [Google Scholar] [CrossRef]
- Alonso, V.; De La Puente, P. System transparency in shared autonomy: A mini review. Front. Neurorobot. 2018, 12, 83. [Google Scholar] [CrossRef]
- Basantis, A.; Miller, M.; Doerzaph, Z.; Neurauter, M.L. Assessing Alternative Approaches for Conveying Automated Vehicle “Intentions”. IEEE Trans. Hum.-Mach. Syst. 2021, 51, 622–631. [Google Scholar] [CrossRef]
- Carsten, O.; Martens, M.H. How can humans understand their automated cars? HMI principles, problems and solutions. Cogn. Technol. Work 2019, 21, 3–20. [Google Scholar] [CrossRef]
- De Visser, E.J.; Cohen, M.; Freedy, A.; Parasuraman, R. A design methodology for trust cue calibration in cognitive agents. In Lecture Notes in Computer Science (Including subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Cham, Switzerland, 2014; Volume 8525, pp. 251–262. [Google Scholar] [CrossRef]
- Zmud, J.; Sener, I.N.; Wagner, J. Consumer Acceptance and Travel Behavior Impacts of Automated Vehicles. 2016. Available online: http://d2dtl5nnlpfr0r.cloudfront.net/tti.tamu.edu/documents/PRC-15-49-F.pdf (accessed on 19 October 2024).
- Gold, C.; Körber, M.; Hohenberger, C.; Lechner, D.; Bengler, K. Trust in Automation–Before and After the Experience of Take-over Scenarios in a Highly Automated Vehicle. Procedia Manuf. 2015, 3, 3025–3032. [Google Scholar] [CrossRef]
- Zhang, T.; Zeng, W.; Zhang, Y.; Tao, D.; Li, G.; Qu, X. What drives people to use automated vehicles? A meta-analytic review. Accid. Anal. Prev. 2021, 159, 106270. [Google Scholar] [CrossRef] [PubMed]
- Meyer-Waarden, L.; Cloarec, J. “Baby, you can drive my car”: Psychological antecedents that drive consumers’ adoption of AI-powered autonomous vehicles. Technovation 2022, 109, 102348. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, K.; Min, H.; Wang, Z.; Zhao, X.; Liu, P. What drives people to accept automated vehicles? Findings from a field experiment. Transp. Res. Part C Emerg. Technol. 2018, 95, 320–334. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Zeng, J.; Zhu, H.; Zhu, H. Automated vehicle acceptance in China: Social influence and initial trust are key determinants. Transp. Res. Part C Emerg. Technol. 2020, 112, 220–233. [Google Scholar] [CrossRef]
- Zhu, G.; Chen, Y.; Zheng, J. Modelling the acceptance of fully autonomous vehicles: A media-based perception and adoption model. Transp. Res. Part F Traffic Psychol. Behav. 2020, 73, 80–91. [Google Scholar] [CrossRef]
- Siegrist, M. Trust and Risk Perception: A Critical Review of the Literature. Risk Anal. 2021, 41, 480–490. [Google Scholar] [CrossRef]
- Zhang, T.; Tao, D.; Qu, X.; Zhang, X.; Lin, R.; Zhang, W. The roles of initial trust and perceived risk in public’s acceptance of automated vehicles. Transp. Res. Part C Emerg. Technol. 2019, 98, 207–220. [Google Scholar] [CrossRef]
- Kim, S.; He, X.; van Egmond, R.; Happee, R. Designing user interfaces for partially automated Vehicles: Effects of information and modality on trust and acceptance. Transp. Res. Part F Traffic Psychol. Behav. 2024, 103, 404–419. [Google Scholar] [CrossRef]
- Rashidi, T.H.; Najmi, A.; Haider, A.; Wang, C.; Hosseinzadeh, F. What we know and do not know about connected and autonomous vehicles. Transp. A Transp. Sci. 2020, 16, 987–1029. [Google Scholar] [CrossRef]
- Schwartz, L.; Gronier, G.; Hermen, J. Acceptation des véhicules entièrement autonomes par les piétons lors de situation de traversée de route: Expérimentation en environnement simulé: Acceptance of Fully Autonomous Vehicles by Pedestrians in Road Crossing Situations: Experimentation in simulated environment. In Proceedings of the 33rd Conference on l’Interaction Humain-Machine, Namur, Belgium, 5–8 April 2022; pp. 1–15. [Google Scholar] [CrossRef]
- Bastola, A.; Brinkley, J.; Wang, H.; Razi, A. Driving Towards Inclusion: Revisiting In-Vehicle Interaction in Autonomous Vehicles. arXiv 2024, arXiv:2401.14571. [Google Scholar] [CrossRef]
- Kacperski, C.; Ulloa, R.; Wautelet, J.; Vogel, T.; Kutzner, F. Creating inclusive mobility systems: Towards age and education sensitive interventions for enhancing autonomous vehicle acceptance. arXiv 2020, arXiv:2311.16780. [Google Scholar]
- Xia, T.; Lin, X.; Sun, Y.; Liu, T. An Empirical Study of the Factors Influencing Users’ Intention to Use Automotive AR-HUD. Sustainability 2023, 15, 5028. [Google Scholar] [CrossRef]
- Schneider, T.; Hois, J.; Rosenstein, A.; Metzl, S.; Gerlicher, A.R.S.; Ghellal, S.; Love, S. Don’t fail me! The Level 5 Autonomous Driving Information Dilemma regarding Transparency and User Experience. In Proceedings of the 28th International Conference on Intelligent User Interfaces, Sydney, Australia, 27–31 March 2023; pp. 540–552. [Google Scholar] [CrossRef]
- Giron, J.; Sela, Y.; Barenboim, L.; Gilboa-Freedman, G.; Amichai-Hamburger, Y. Persona-PhysioSync AV: Personalized Interaction through Personality and Physiology Monitoring in Autonomous Vehicles. Sensors 2024, 24, 1977. [Google Scholar] [CrossRef]
- Flohr, L.A.; Schuß, M.; Wallach, D.P.; Krüger, A.; Riener, A. Designing for passengers’ information needs on fellow travelers: A comparison of day and night rides in shared automated vehicles. Appl. Ergon. 2024, 116, 104198. [Google Scholar] [CrossRef]
- Sitinjak, C.; Simic, V.; Pamucar, D. Psychological factors shaping public acceptance of the adoption of autonomous vehicles in Indonesia. J. Transp. Health 2024, 34, 101726. [Google Scholar] [CrossRef]
- Tan, Z.; Dai, N.; Su, Y.; Zhang, R.; Li, Y.; Wu, D.; Li, S. Human–Machine Interaction in Intelligent and Connected Vehicles: A Review of Status Quo, Issues, and Opportunities. IEEE Trans. Intell. Transp. Syst. 2022, 23, 13954–13975. [Google Scholar] [CrossRef]
- Ghasri, M.; Vij, A. The potential impact of media commentary and social influence on consumer preferences for driverless cars. Transp. Res. Part C Emerg. Technol. 2021, 127, 103132. [Google Scholar] [CrossRef]
- Kim, J.; Rasouli, S.; Timmermans, H.J.P. Social networks, social influence and activity-travel behaviour: A review of models and empirical evidence. Transp. Rev. 2018, 38, 499–523. [Google Scholar] [CrossRef]
- Liu, P.; Yang, R.; Xu, Z. Public Acceptance of Fully Automated Driving: Effects of Social Trust and Risk/Benefit Perceptions. Risk Anal. 2019, 39, 326–341. [Google Scholar] [CrossRef]
- Lim, M.S.C.; Molenaar, A.; Brennan, L.; Reid, M.; McCaffrey, T. Young Adults’ Use of Different Social Media Platforms for Health Information: Insights From Web-Based Conversations. J. Med. Internet Res. 2022, 24, e23656. [Google Scholar] [CrossRef]
- Panagiotopoulos, I.; Dimitrakopoulos, G. An empirical investigation on consumers’ intentions towards autonomous driving. Transp. Res. Part C Emerg. Technol. 2018, 95, 773–784. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a nation for autonomous vehicles: Opportunities, barriers and policy recommendations. Transp. Res. Part A Policy Pract. 2015, 77, 167–181. [Google Scholar] [CrossRef]
- Axsen, J.; Orlebar, C.; Skippon, S. Social influence and consumer preference formation for pro-environmental technology: The case of a U.K. workplace electric-vehicle study. Ecol. Econ. 2013, 95, 96–107. [Google Scholar] [CrossRef]
- Sherwin, H.; Chatterjee, K.; Jain, J. An exploration of the importance of social influence in the decision to start bicycling in England. Transp. Res. Part A Policy Pract. 2014, 68, 32–45. [Google Scholar] [CrossRef]
- Bartle, C.; Avineri, E.; Chatterjee, K. Online information-sharing: A qualitative analysis of community, trust and social influence amongst commuter cyclists in the UK. Transp. Res. Part F Traffic Psychol. Behav. 2013, 16, 60–72. [Google Scholar] [CrossRef]
- Ghasri, M.; Ardeshiri, A.; Rashidi, T. Perception towards electric vehicles and the impact on consumers’ preference. Transp. Res. Part D Transp. Environ. 2019, 77, 271–291. [Google Scholar] [CrossRef]
- Brown, A.; Gonder, J.; Repac, B. An Analysis of Possible Energy Impacts of Automated Vehicles. In Lecture Notes in Mobility; Springer: Cham, Switzerland, 2014; pp. 137–153. [Google Scholar] [CrossRef]
- Hevelke, A.; Nida-Rümelin, J. Responsibility for Crashes of Autonomous Vehicles: An Ethical Analysis. Sci. Eng. Ethics 2015, 21, 619–630. [Google Scholar] [CrossRef] [PubMed]
- Buckley, L.; Kaye, S.A.; Pradhan, A.K. Psychosocial factors associated with intended use of automated vehicles: A simulated driving study. Accid. Anal. Prev. 2018, 115, 202–208. [Google Scholar] [CrossRef]
- Shabanpour, R.; Shamshiripour, A.; Mohammadian, A. Modeling adoption timing of autonomous vehicles: Innovation diffusion approach. Transportation 2018, 45, 1607–1621. [Google Scholar] [CrossRef]
- Bass, F.M. A new product growth for model consumer durables. Manag. Sci. 2004, 50, 1825–1832. [Google Scholar] [CrossRef]
- Yu, P. Diffusion of Innovation theory. In Implementation Science: The Key Concepts; Routledge: Abingdon, UK, 2022; pp. 59–61. ISBN 9781000583410. [Google Scholar]
- Liu, P. Positive, negative, ambivalent, or indifferent? Exploring the structure of public attitudes toward self-driving vehicles on public roads. Transp. Res. Part A Policy Pract. 2020, 142, 27–38. [Google Scholar] [CrossRef]
- Kyriakidis, M.; Happee, R.; De Winter, J.C.F. Public opinion on automated driving: Results of an international questionnaire among 5000 respondents. Transp. Res. Part F Traffic Psychol. Behav. 2015, 32, 127–140. [Google Scholar] [CrossRef]
- Hansson, L. Regulatory governance in emerging technologies: The case of autonomous vehicles in Sweden and Norway. Res. Transp. Econ. 2020, 83, 100967. [Google Scholar] [CrossRef]
- Lim, H.S.M.; Taeihagh, A. Algorithmic decision-making in AVs: Understanding ethical and technical concerns for smart cities. Sustainability 2019, 11, 5791. [Google Scholar] [CrossRef]
- Sadaf, M.; Iqbal, Z.; Javed, A.R.; Saba, I.; Krichen, M.; Majeed, S.; Raza, A. Connected and Automated Vehicles: Infrastructure, Applications, Security, Critical Challenges, and Future Aspects. Technologies 2023, 11, 117. [Google Scholar] [CrossRef]
- Li, W.; Hsu, C.Y. GeoAI for Large-Scale Image Analysis and Machine Vision: Recent Progress of Artificial Intelligence in Geography. ISPRS Int. J. Geo-Inf. 2022, 11, 385. [Google Scholar] [CrossRef]
- Kaltenhäuser, B.; Werdich, K.; Dandl, F.; Bogenberger, K. Market development of autonomous driving in Germany. Transp. Res. Part A Policy Pract. 2020, 132, 882–910. [Google Scholar] [CrossRef]
- Jing, P.; Yuan, D.; Du, L.; Xu, G.; Chen, Y.; Zhan, F. Research of acceptance of autonomous vehicles technologybased on mapping knowledge domain. Jiangsu Daxue Xuebao (Ziran Kexue Ban)/Journal Jiangsu Univ. (Nat. Sci. Ed.) 2023, 44, 14–21. [Google Scholar] [CrossRef]
- Wu, J.; Liao, H.; Wang, J.W.; Chen, T. The role of environmental concern in the public acceptance of autonomous electric vehicles: A survey from China. Transp. Res. Part F Traffic Psychol. Behav. 2019, 60, 37–46. [Google Scholar] [CrossRef]
- Feys, M.; Rombaut, E.; Vanhaverbeke, L. Does a test ride influence attitude towards autonomous vehicles? A field experiment with pretest and posttest measurement. Sustainability 2021, 13, 5387. [Google Scholar] [CrossRef]
- Jing, P.; Wang, W.; Wu, L.L. Acceptance of Autonomous Vehicles for the Elderly. Zhongguo Gonglu Xuebao/China J. Highw. Transp. 2021, 34, 158–171. [Google Scholar] [CrossRef]
- Othman, K. Investigating how the public acceptance of autonomous vehicles evolve with the changes in the level of knowledge: A demographic analysis. Cogent Eng. 2023, 10, 2220502. [Google Scholar] [CrossRef]
- Park, J.; Hong, E.P.; Le, H.T. Adopting autonomous vehicles: The moderating effects of demographic variables. J. Retail. Consum. Serv. 2021, 63, 102687. [Google Scholar] [CrossRef]
- Ansarinejad, M.; Ansarinejad, K.; Lu, P.; Huang, Y.; Tolliver, D. Autonomous Vehicles in Rural Areas: A Review of Challenges, Opportunities, and Solutions. Appl. Sci. 2025, 15, 4195. [Google Scholar] [CrossRef]
- Dianin, A.; Gidam, M.; Ravazzoli, E.; Hauger, G. International Journal of Transportation Science and Technology Collective accessibility impacts of public transport automation on rural areas: The case study of Mühlwald, South Tyrol. Int. J. Transp. Sci. Technol. 2024; in press. [Google Scholar] [CrossRef]
- Yuen, K.F.; Huyen, D.T.K.; Wang, X.; Qi, G. Factors influencing the adoption of shared autonomous vehicles. Int. J. Environ. Res. Public Health 2020, 17, 4868. [Google Scholar] [CrossRef] [PubMed]
- Zhou, F.; Zheng, Z.; Whitehead, J.; Washington, S.; Perrons, R.K.; Page, L. Preference heterogeneity in mode choice for car-sharing and shared automated vehicles. Transp. Res. Part A Policy Pract. 2020, 132, 633–650. [Google Scholar] [CrossRef]
- Patel, R.K.; Etminani-Ghasrodashti, R.; Kermanshachi, S.; Rosenberger, J.M.; Foss, A. Exploring willingness to use shared autonomous vehicles. Int. J. Transp. Sci. Technol. 2023, 12, 765–778. [Google Scholar] [CrossRef]
- Wali, B.; Khattak, A.J. A joint behavioral choice model for adoption of automated vehicle ride sourcing and carsharing technologies: Role of built environment & sustainable travel behaviors. Transp. Res. Part C Emerg. Technol. 2022, 136, 103557. [Google Scholar] [CrossRef]
- Haboucha, C.J.; Ishaq, R.; Shiftan, Y. User preferences regarding autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2017, 78, 37–49. [Google Scholar] [CrossRef]
- Wang, Z.; Safdar, M.; Zhong, S.; Liu, J.; Xiao, F. Public Preferences of Shared Autonomous Vehicles in Developing Countries: A Cross-National Study of Pakistan and China. J. Adv. Transp. 2021, 2021, 5141798. [Google Scholar] [CrossRef]
- Webb, J.; Wilson, C.; Kularatne, T. Will people accept shared autonomous electric vehicles? A survey before and after receipt of the costs and benefits. Econ. Anal. Policy 2019, 61, 118–135. [Google Scholar] [CrossRef]
- Kassens-Noor, E.; Kotval-Karamchandani, Z.; Cai, M. Willingness to ride and perceptions of autonomous public transit. Transp. Res. Part A Policy Pract. 2020, 138, 92–104. [Google Scholar] [CrossRef]
- Gurumurthy, K.M.; Kockelman, K.M. Modeling Americans’ autonomous vehicle preferences: A focus on dynamic ride-sharing, privacy & long-distance mode choices. Technol. Forecast. Soc. Change 2020, 150, 119792. [Google Scholar] [CrossRef]
- Acheampong, R.A.; Cugurullo, F.; Gueriau, M.; Dusparic, I. Can autonomous vehicles enable sustainable mobility in future cities? Insights and policy challenges from user preferences over different urban transport options. Cities 2021, 112, 103134. [Google Scholar] [CrossRef]
- Shatanawi, M.; Hajouj, M.; Edries, B.; Mészáros, F. The Interrelationship between Road Pricing Acceptability and Self-Driving Vehicle Adoption: Insights from Four Countries. Sustainability 2022, 14, 12798. [Google Scholar] [CrossRef]
- Chen, Y.; Dai, X.; Fu, P.; Luo, G.; Shi, P. A review of China’s automotive industry policy: Recent developments and future trends. J. Traffic Transp. Eng. (Engl. Ed.) 2024, 11, 867–895. [Google Scholar] [CrossRef]
- Qin, Q.; Zhou, Z.; Zhou, J.; Huang, Z.; Zeng, X.; Fan, B. Sentiment and attention of the Chinese public toward electric vehicles: A big data analytics approach. Eng. Appl. Artif. Intell. 2024, 127, 107216. [Google Scholar] [CrossRef]
- Su, Y.S.; Huang, H.; Daim, T.; Chien, P.W.; Peng, R.L.; Karaman Akgul, A. Assessing the technological trajectory of 5G-V2X autonomous driving inventions: Use of patent analysis. Technol. Forecast. Soc. Change 2023, 196, 122817. [Google Scholar] [CrossRef]
- Xu, L.; He, B.; Zhou, H.; He, J. Impact and revolution on law on road traffic safety by autonomous driving technology in China. Comput. Law Secur. Rev. 2023, 51, 105906. [Google Scholar] [CrossRef]
- Tan, H.; Zhao, F.; Liu, Z.; Song, H. Effects of nine typical technologies for primary autonomous vehicles on road safety in China. iScience 2023, 26, 106109. [Google Scholar] [CrossRef]
- Winkler, K.-C. Autonomous Vehicles—Regulation in Germany and the US and Its Impact on the German Car Industry. 2019. Available online: http://arno.uvt.nl/show.cgi?fid=149595 (accessed on 19 February 2025).
- Tan, S.Y.; Taeihagh, A. Adaptive governance of autonomous vehicles: Accelerating the adoption of disruptive technologies in Singapore. Gov. Inf. Q. 2021, 38, 101546. [Google Scholar] [CrossRef]
- Ki, J. A Comparative Analysis of Autonomous Vehicle Policies among Korea, Japan, and France. FFJ Discuss. Pap. Ser. 2020, 20–02, 2–57. Available online: https://hal.science/hal-02562482 (accessed on 19 February 2025).
- Moody, J.; Bailey, N.; Zhao, J. Public perceptions of autonomous vehicle safety: An international comparison. Saf. Sci. 2020, 121, 634–650. [Google Scholar] [CrossRef]
- Kapser, S.; Abdelrahman, M. Acceptance of autonomous delivery vehicles for last-mile delivery in Germany–Extending UTAUT2 with risk perceptions. Transp. Res. Part C Emerg. Technol. 2020, 111, 210–225. [Google Scholar] [CrossRef]
- Khan, S.M.; Chowdhury, M.; Morris, E.A.; Deka, L. Synergizing Roadway Infrastructure Investment with Digital Infrastructure for Infrastructure-Based Connected Vehicle Applications: Review of Current Status and Future Directions. J. Infrastruct. Syst. 2019, 25, 03119001. [Google Scholar] [CrossRef]
- Ye, X.; Sui, X.; Wang, T.; Yan, X.; Chen, J. Research on parking choice behavior of shared autonomous vehicle services by measuring users’ intention of usage. Transp. Res. Part F Traffic Psychol. Behav. 2022, 88, 81–98. [Google Scholar] [CrossRef]
- Yuen, K.F.; Chua, G.; Wang, X.; Ma, F.; Li, K.X. Understanding public acceptance of autonomous vehicles using the theory of planned behaviour. Int. J. Environ. Res. Public Health 2020, 17, 4419. [Google Scholar] [CrossRef] [PubMed]
- Bansal, P.; Kockelman, K.M.; Singh, A. Assessing public opinions of and interest in new vehicle technologies: An Austin perspective. Transp. Res. Part C Emerg. Technol. 2016, 67, 1–14. [Google Scholar] [CrossRef]
- Benleulmi, A.Z.; Blecker, T. Investigating the factors influencing the acceptance of fully autonomous cars. Proc. Hambg. Int. Conf. Logist. 2017, 23, 99–115. Available online: https://www.econstor.eu/handle/10419/209304 (accessed on 19 February 2025).
- Yuen, K.F.; Cai, L.; Qi, G.; Wang, X. Factors influencing autonomous vehicle adoption: An application of the technology acceptance model and innovation diffusion theory. Technol. Anal. Strateg. Manag. 2021, 33, 505–519. [Google Scholar] [CrossRef]
- Sanbonmatsu, D.M.; Strayer, D.L.; Yu, Z.; Biondi, F.; Cooper, J.M. Cognitive underpinnings of beliefs and confidence in beliefs about fully automated vehicles. Transp. Res. Part F Traffic Psychol. Behav. 2018, 55, 114–122. [Google Scholar] [CrossRef]
- Li, H.; Yu, S.; Zheng, J.; Zhao, X.; Du, P.; Tan, H. Acceptance Factors for Younger Passengers in Shared Autonomous Vehicles. In Cross-Cultural Design. Applications in Cultural Heritage, Tourism, Autonomous Vehicles, and Intelligent Agents, Proceedings of the 13th International Conference, CCD 2021, Held as Part of the 23rd HCI International Conference, HCII 2021, Virtual Event, 24–29 July 2021; Springer International Publishing: Cham, Switzerland, 2021; Volume 12773, pp. 212–224. [Google Scholar] [CrossRef]
- Antonakopoulou, A.; Vlahogianni, E.; Karaseitanidis, G.; Patatouka, E.; Portouli, E.; Amditis, A.; Raptis, O.; Latsa, E. A research approach for studying the a priori acceptance of autonomous passenger transportation towards sustainable urban mobility planning. In Human Factors in Transportation; AHFE International: Orlando, FL, USA, 2023; Volume 95. [Google Scholar] [CrossRef]
- Tang, T.; Chen, J.; Guo, Y.; Sheng, D.; Li, X.; Anastasopoulos, P.C. Intention to adopt autonomous vehicles in China: A comparative study among residents in different-sized cities. Transp. Lett. 2024, 1–20. [Google Scholar] [CrossRef]
- Li, X.; Zou, J.; Agrawal, S.; Guo, Y.; Tang, T.; Feng, X. Role of policy and consumer attitudes in people’s intention to use autonomous vehicles: A comparative study in China and the USA. Transportation 2024. [Google Scholar] [CrossRef]
- Lazányi, K. Perceived Risks of Autonomous Vehicles. Risks 2023, 11, 26. [Google Scholar] [CrossRef]
- McColluch, B. Self-Driving Cars Will Be on French Roads by 2022. Available online: https://www.connexionfrance.com/news/self-driving-cars-will-be-on-french-roads-by-2022/395910 (accessed on 16 January 2025).
- Du, N.; Robert, L.; Yang, X.J. Cross-Cultural Investigation of the Effects of Explanations on Drivers’ Trust, Preference, and Anxiety in Highly Automated Vehicles. Transp. Res. Rec. 2023, 2677, 554–561. [Google Scholar] [CrossRef]
- Bellone, M.; Ismailogullari, A.; Kantala, T.; Mäkinen, S.; Soe, R.M.; Kyyrö, M.Å. A cross-country comparison of user experience of public autonomous transport. Eur. Transp. Res. Rev. 2021, 13, 19. [Google Scholar] [CrossRef]
- Edelmann, A.; Stümper, S.; Petzoldt, T. Cross-cultural differences in the acceptance of decisions of automated vehicles. Appl. Ergon. 2021, 92, 103346. [Google Scholar] [CrossRef]
- West, D.M. Moving Forward: Self-Driving Vehicles in China, Europe, Japan, Korea, and the United States; Center for Technology Innovation at Brookings: Washington, DC, USA, 2016; pp. 1–32. [Google Scholar]
- Currie, G. Lies, damned lies, AVs, shared mobility, and urban transit futures. J. Public Transp. 2018, 21, 19–30. [Google Scholar] [CrossRef]
- Abuelsamid, S.; Alexander, D.; Jerram, L. Navigant Research Leaderboard Report: Automated Driving. Navig. Res. 2017. Available online: http://62.nl.dealer-preview.co/SiteAssets/LB-AV-17-Navigant-Research_FINAL.pdf (accessed on 16 January 2025).
- Sedat Sonko; Emmanuel Augustine Etukudoh; Kenneth Ifeanyi Ibekwe; Valentine Ikenna Ilojianya; Cosmas Dominic Daudu A comprehensive review of embedded systems in autonomous vehicles: Trends, challenges, and future directions. World J. Adv. Res. Rev. 2024, 21, 2009–2020. [CrossRef]
- Nikitas, A.; Vitel, A.E.; Cotet, C. Autonomous vehicles and employment: An urban futures revolution or catastrophe? Cities 2021, 114, 103203. [Google Scholar] [CrossRef]
- Bachute, M.R.; Subhedar, J.M. Autonomous Driving Architectures: Insights of Machine Learning and Deep Learning Algorithms. Mach. Learn. Appl. 2021, 6, 100164. [Google Scholar] [CrossRef]
- Ryan, M. The Future of Transportation: Ethical, Legal, Social and Economic Impacts of Self-driving Vehicles in the Year 2025. Sci. Eng. Ethics 2020, 26, 1185–1208. [Google Scholar] [CrossRef] [PubMed]
- Anderson, J.; Kalra, N.; Stanley, K.; Sorensen, P.; Samaras, C.; Oluwatola, O. Autonomous Vehicle Technology: A Guide for Policymakers; RAND: Santa Monica, CA, USA, 2016. [Google Scholar] [CrossRef]
- Nielsen, P.; Dahanayaka, M.; Perera, H.N.; Thibbotuwawa, A.; Kilic, D.K. A systematic review of vehicle routing problems and models in multi-echelon distribution networks. Supply Chain Anal. 2024, 7, 100072. [Google Scholar] [CrossRef]
- Fagnant, D.J.; Kockelman, K. Preparing a Nation for Autonomous Vehicles: Opportunities, Barriers and Policy Recommendations for Capitalizing on Self-Driven Vehicles. Transp. Res. Part A Policy Pract. 2013. pre-print. Available online: https://www.caee.utexas.edu/prof/kockelman/public_html/trb14enoavs.pdf (accessed on 16 January 2025).
- Zhang, Q.; Wallbridge, C.D.; Jones, D.M.; Morgan, P.L. Public perception of autonomous vehicle capability determines judgment of blame and trust in road traffic accidents. Transp. Res. Part A Policy Pract. 2024, 179, 103887. [Google Scholar] [CrossRef]
- Alshaafee, A.A.A.; Iahad, N.A. Enhanced net valence model (NVM) for the adoption of autonomous vehicles (AVs) by novice drivers. In Proceedings of the 2019 6th International Conference on Research and Innovation in Information Systems, ICRIIS, Johor Bahru, Malaysia, 2–3 December 2019. [Google Scholar] [CrossRef]
- Wang, Y.; Gu, J.; Wang, S.; Wang, J. Understanding consumers’ willingness to use ride-sharing services: The roles of perceived value and perceived risk. Transp. Res. Part C Emerg. Technol. 2019, 105, 504–519. [Google Scholar] [CrossRef]
- Lin, Y.; Wen, M.M.; Yu, J. Enterprise Risk Management: Strategic Antecedents, Risk Integration, and Performance. N. Am. Actuar. J. 2012, 16, 1–28. [Google Scholar] [CrossRef]
- Jing, P.; Xu, G.; Chen, Y.; Shi, Y.; Zhan, F. The determinants behind the acceptance of autonomous vehicles: A systematic review. Sustainability 2020, 12, 1719. [Google Scholar] [CrossRef]
- Yang, Q.; Pang, C.; Liu, L.; Yen, D.C.; Michael Tarn, J. Exploring consumer perceived risk and trust for online payments: An empirical study in China’s younger generation. Comput. Hum. Behav. 2015, 50, 9–24. [Google Scholar] [CrossRef]
- Waung, M.; McAuslan, P.; Lakshmanan, S. Trust and intention to use autonomous vehicles: Manufacturer focus and passenger control. Transp. Res. Part F Traffic Psychol. Behav. 2021, 80, 328–340. [Google Scholar] [CrossRef]
- Lee, J.; Lee, D.; Park, Y.; Lee, S.; Ha, T. Autonomous vehicles can be shared, but a feeling of ownership is important: Examination of the influential factors for intention to use autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 107, 411–422. [Google Scholar] [CrossRef]
- Menon, N.; Pinjari, A.R.; Zhang, Y.; Zou, L. Consumer Perception and Intended Adoption of Autonomous Vehicle Technology Findings from a University Population Survey. In Proceedings of the Transportation Research Board 95th Annual Meeting, Washington, DC, USA, 10–14 January 2016. [Google Scholar]
- Man, S.S.; Xiong, W.; Chang, F.; Chan, A.H.S. Critical Factors Influencing Acceptance of Automated Vehicles by Hong Kong Drivers. IEEE Access 2020, 8, 109845–109856. [Google Scholar] [CrossRef]
- Sperling, D. Three Revolutions: Steering Automated, Shared, and Electric Vehicles to a Better Future; Springer: Berlin/Heidelberg, Germany, 2018; ISBN 9781610919067. [Google Scholar]
- Krueger, R.; Rashidi, T.H.; Rose, J.M. Preferences for shared autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2016, 69, 343–355. [Google Scholar] [CrossRef]
- Widen, W.H.; Koopman, P. Autonomous Vehicle Regulation & Trust: The Impact of Failures to Comply with Standards. UCLA J. Law Technol. 2022, 27, 169–261. Available online: www.uclajolt.com (accessed on 16 January 2025).
- Luo, Q.; Saigal, R.; Chen, Z.; Yin, Y. Accelerating the adoption of automated vehicles by subsidies: A dynamic games approach. Transp. Res. Part B Methodol. 2019, 129, 226–243. [Google Scholar] [CrossRef]
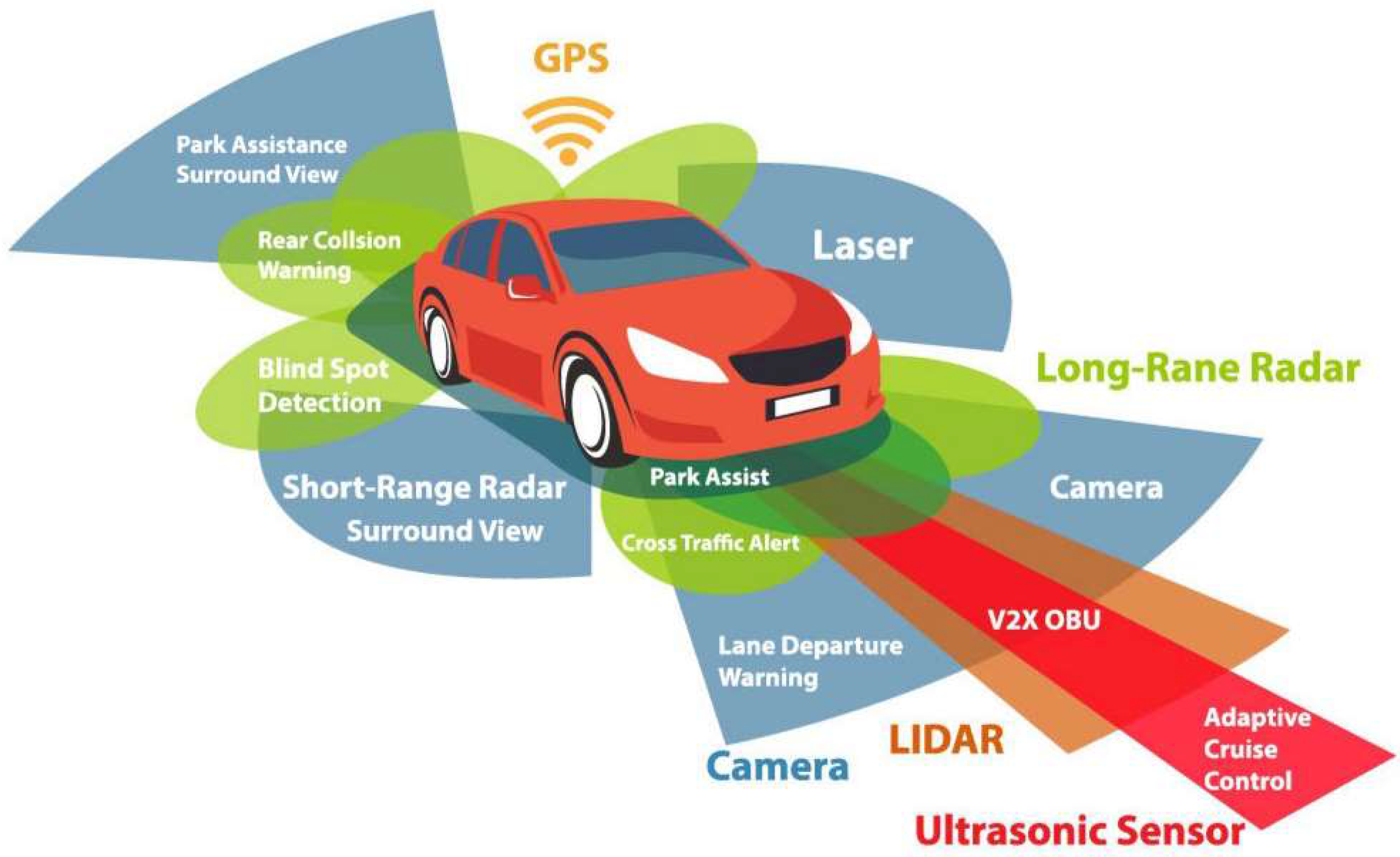
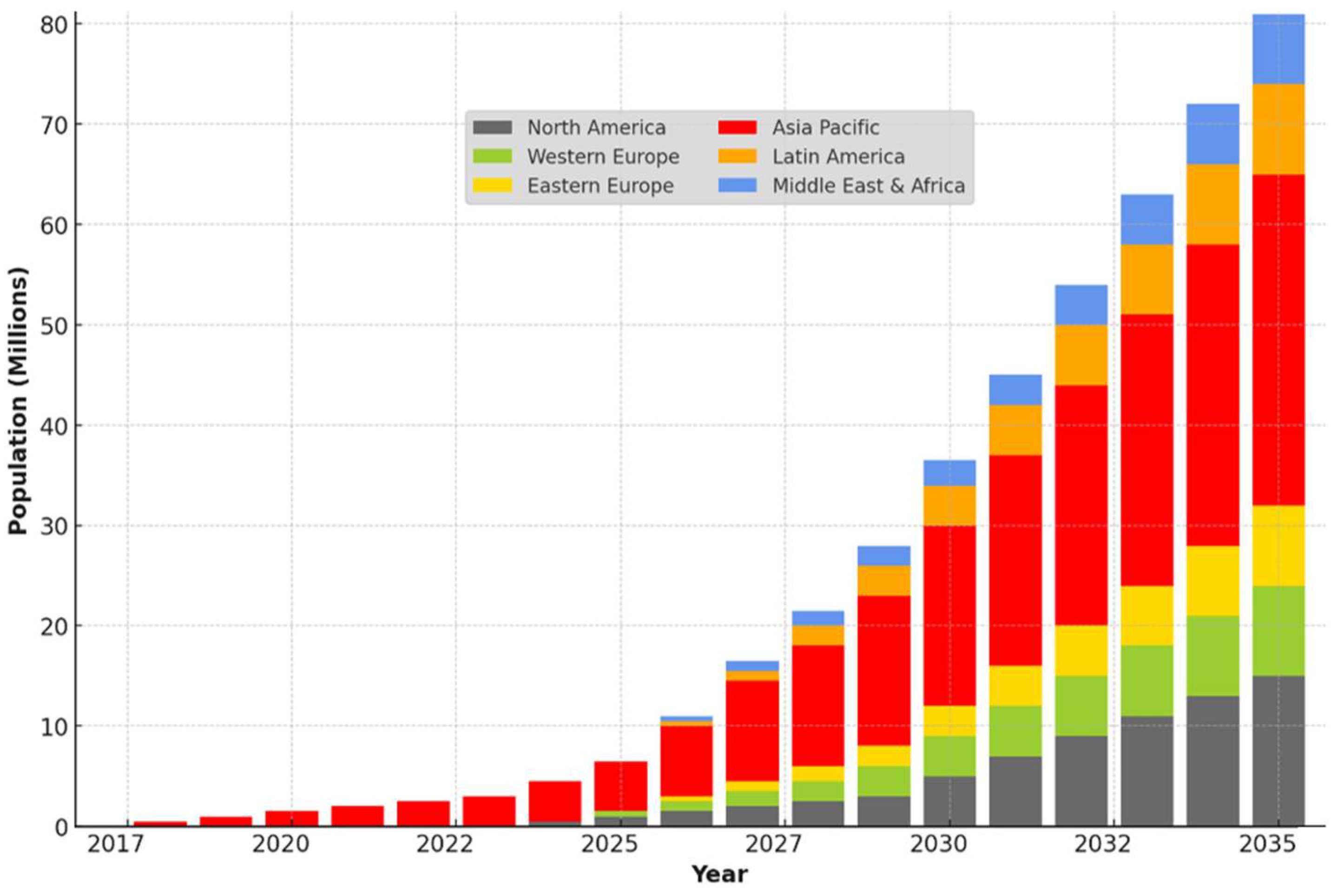
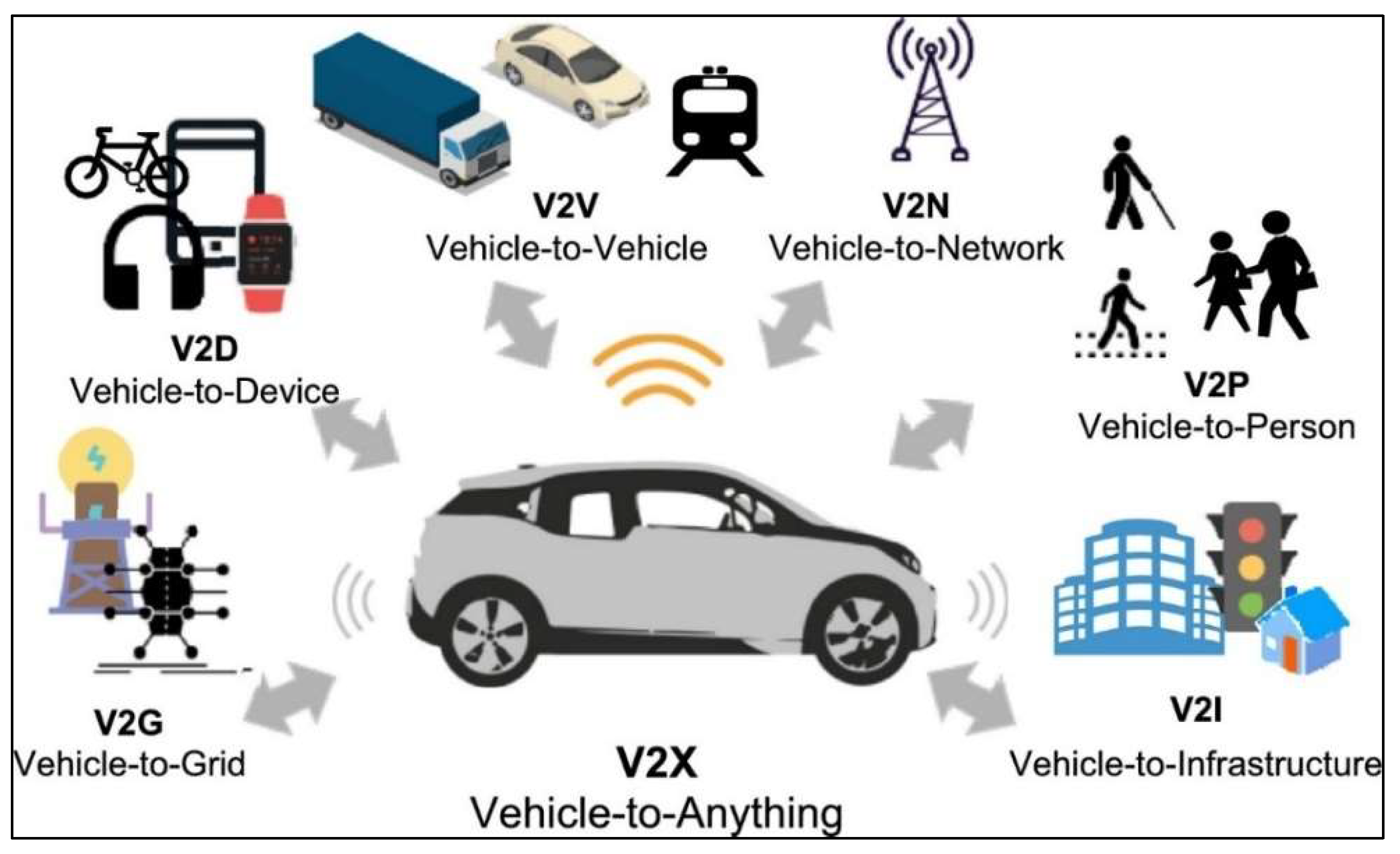
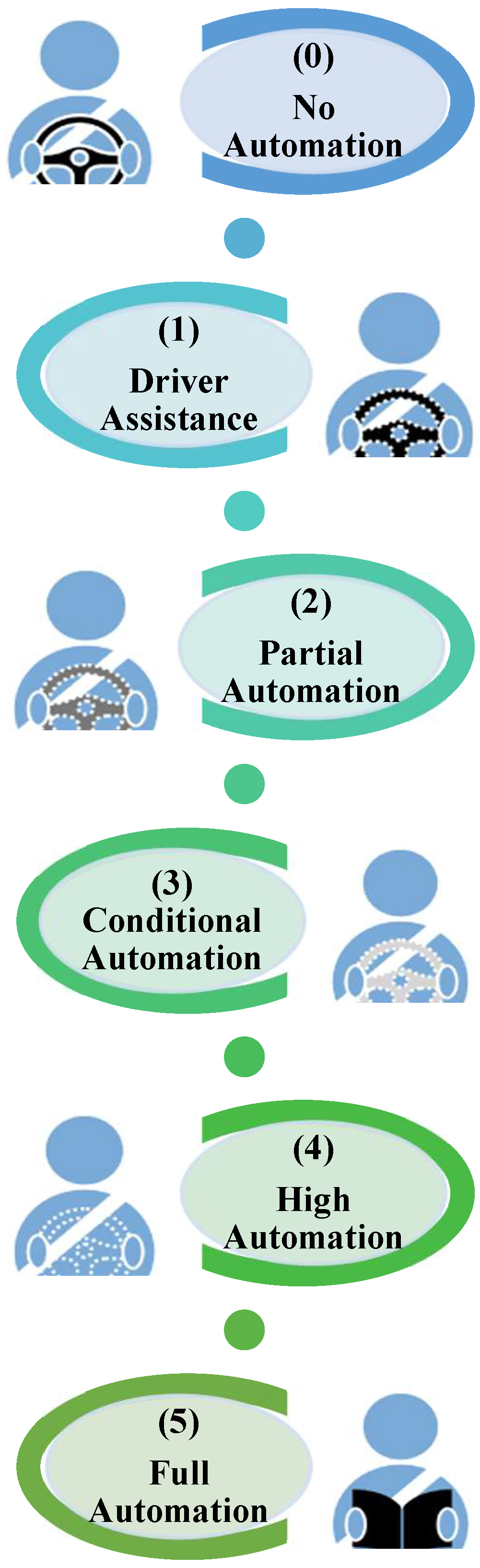
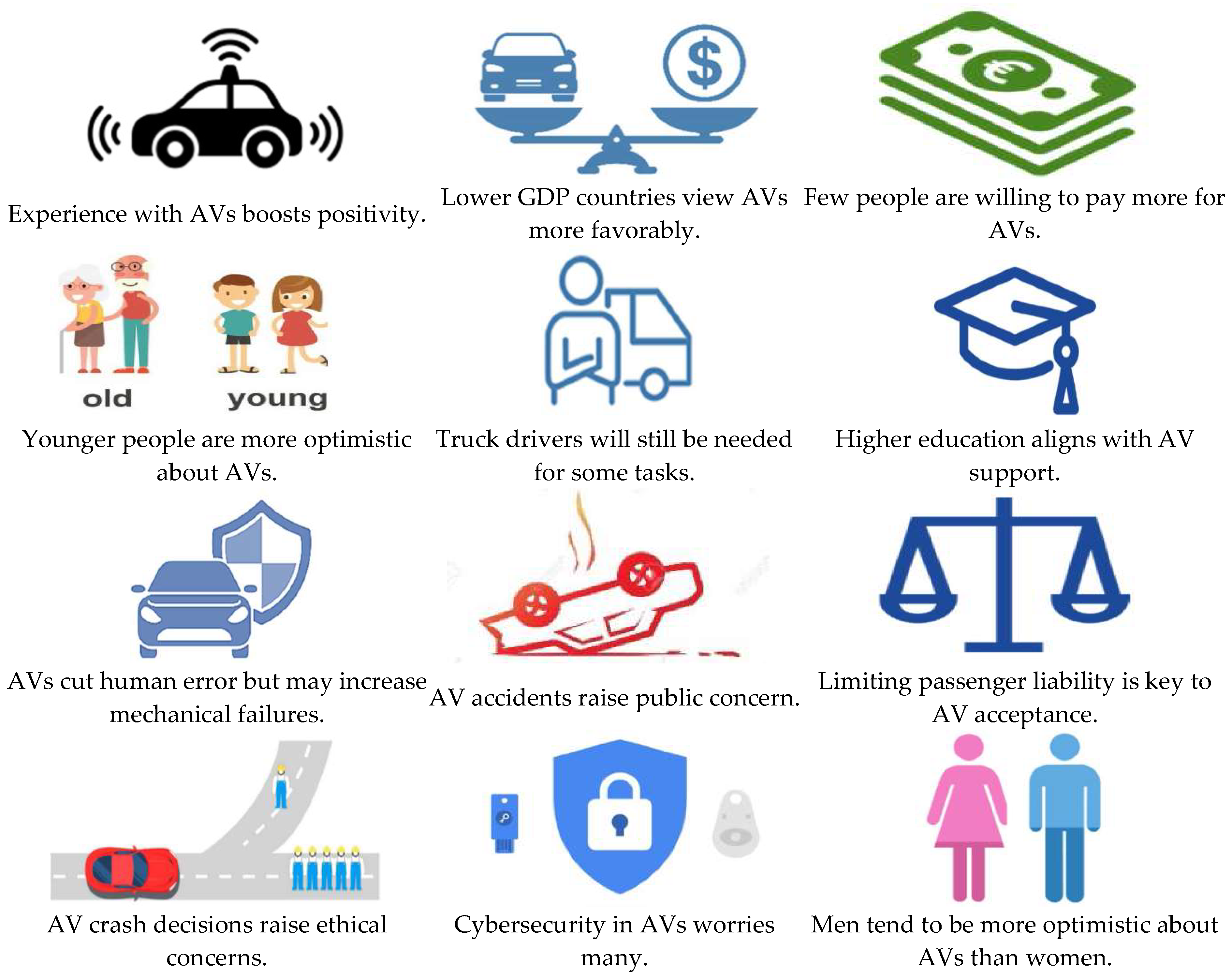
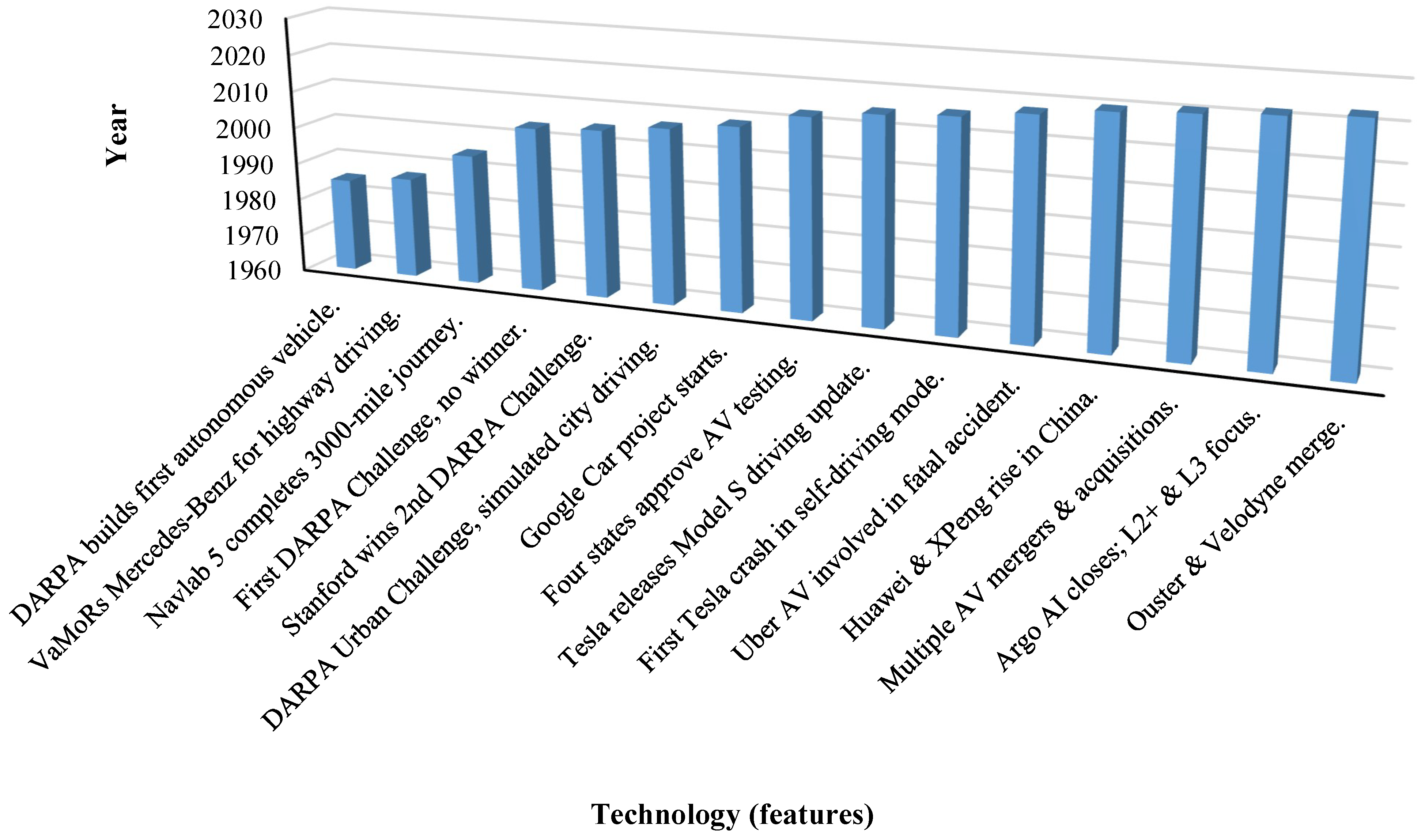
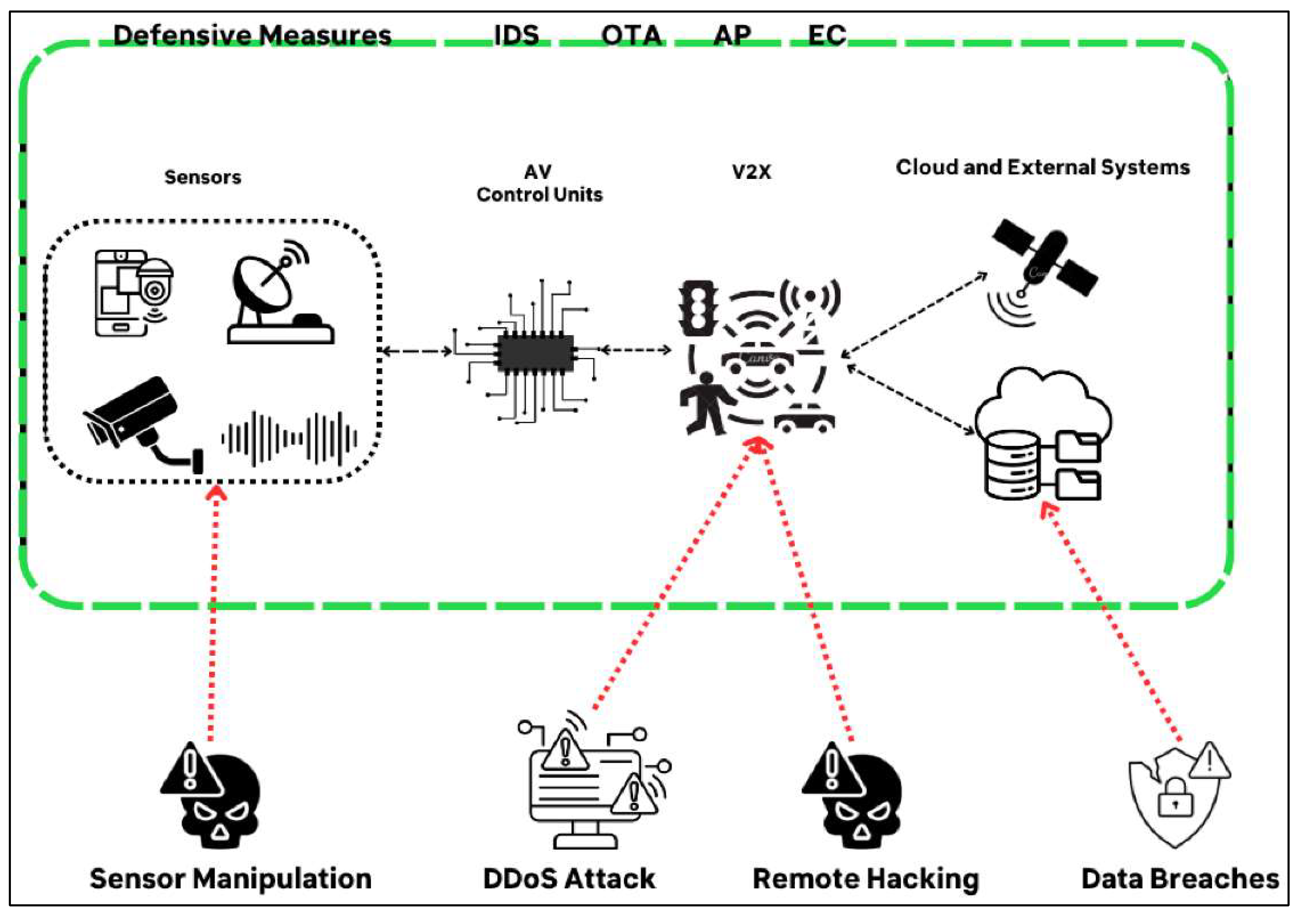
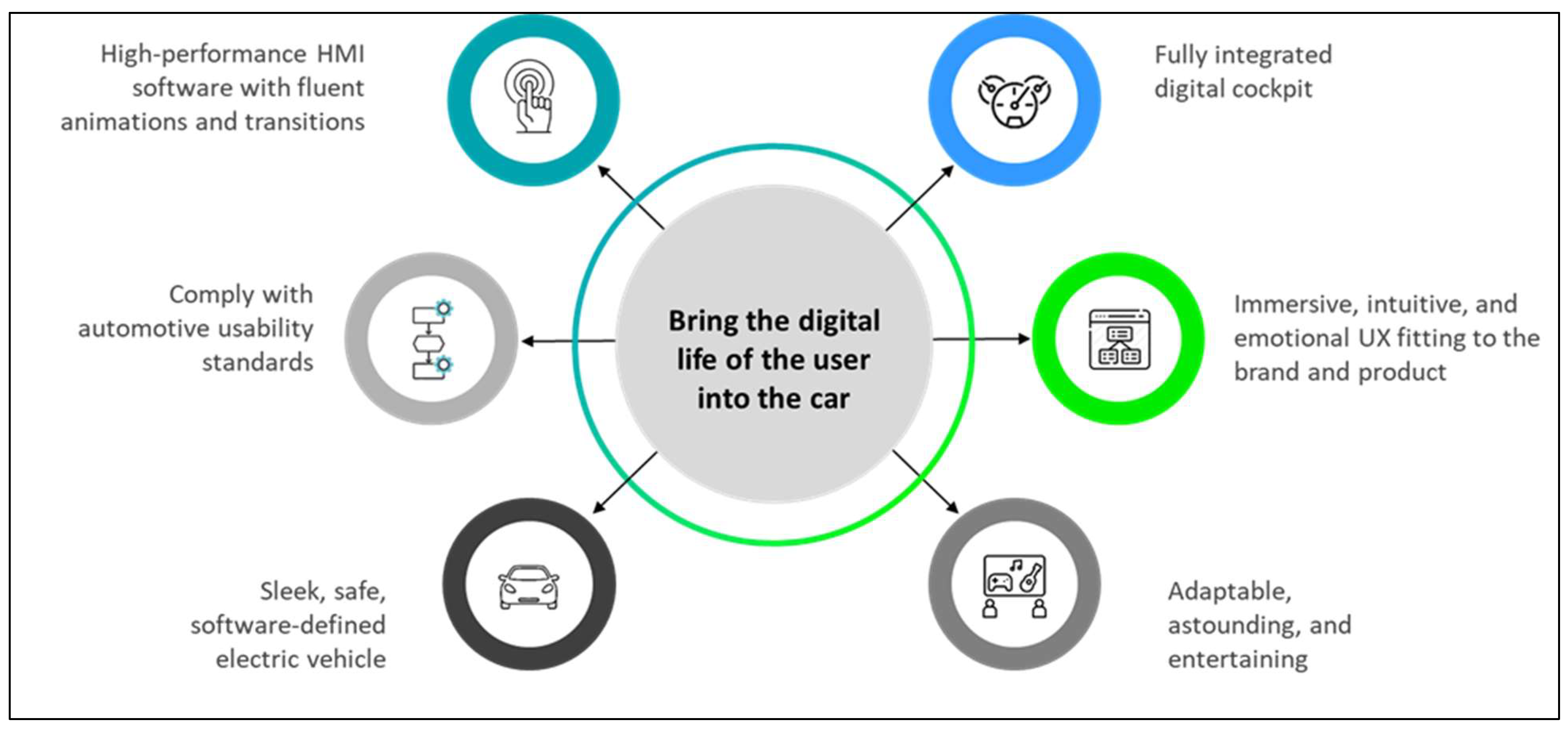
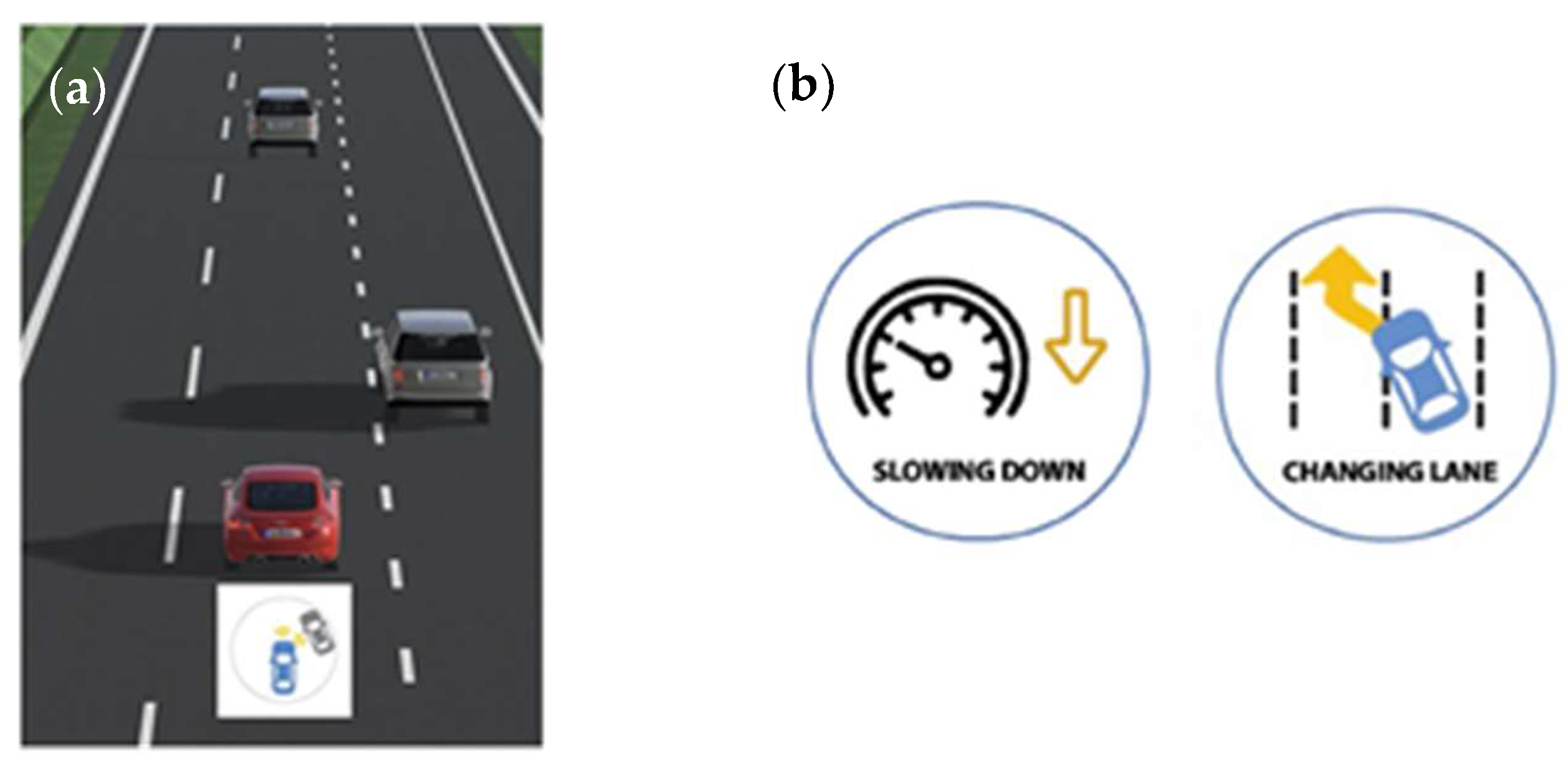
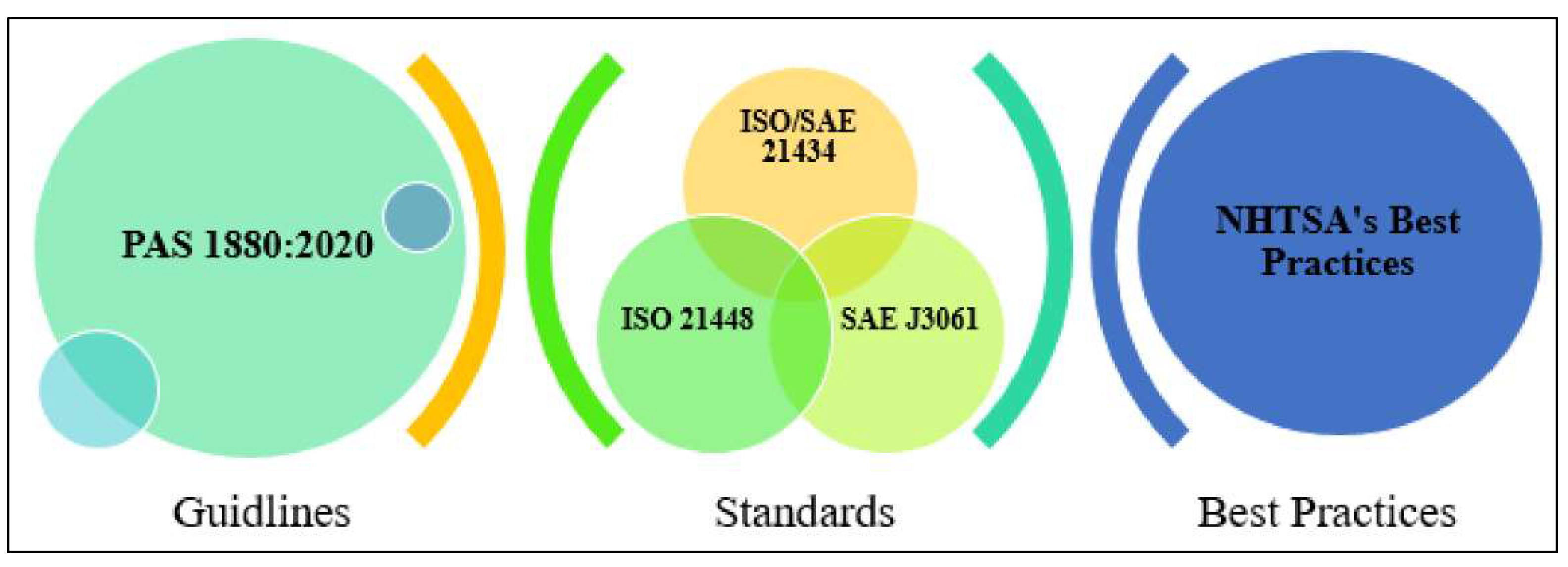
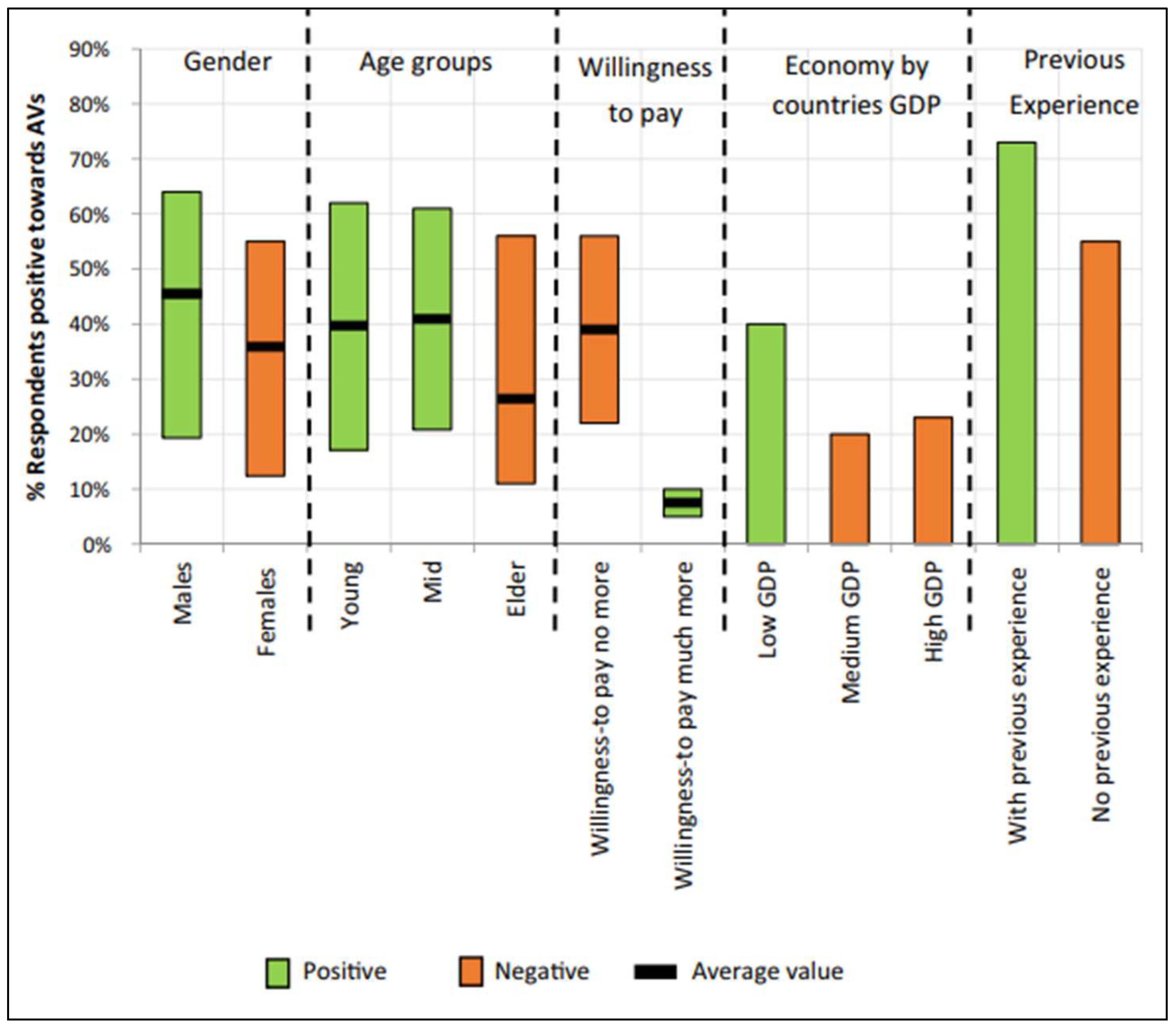
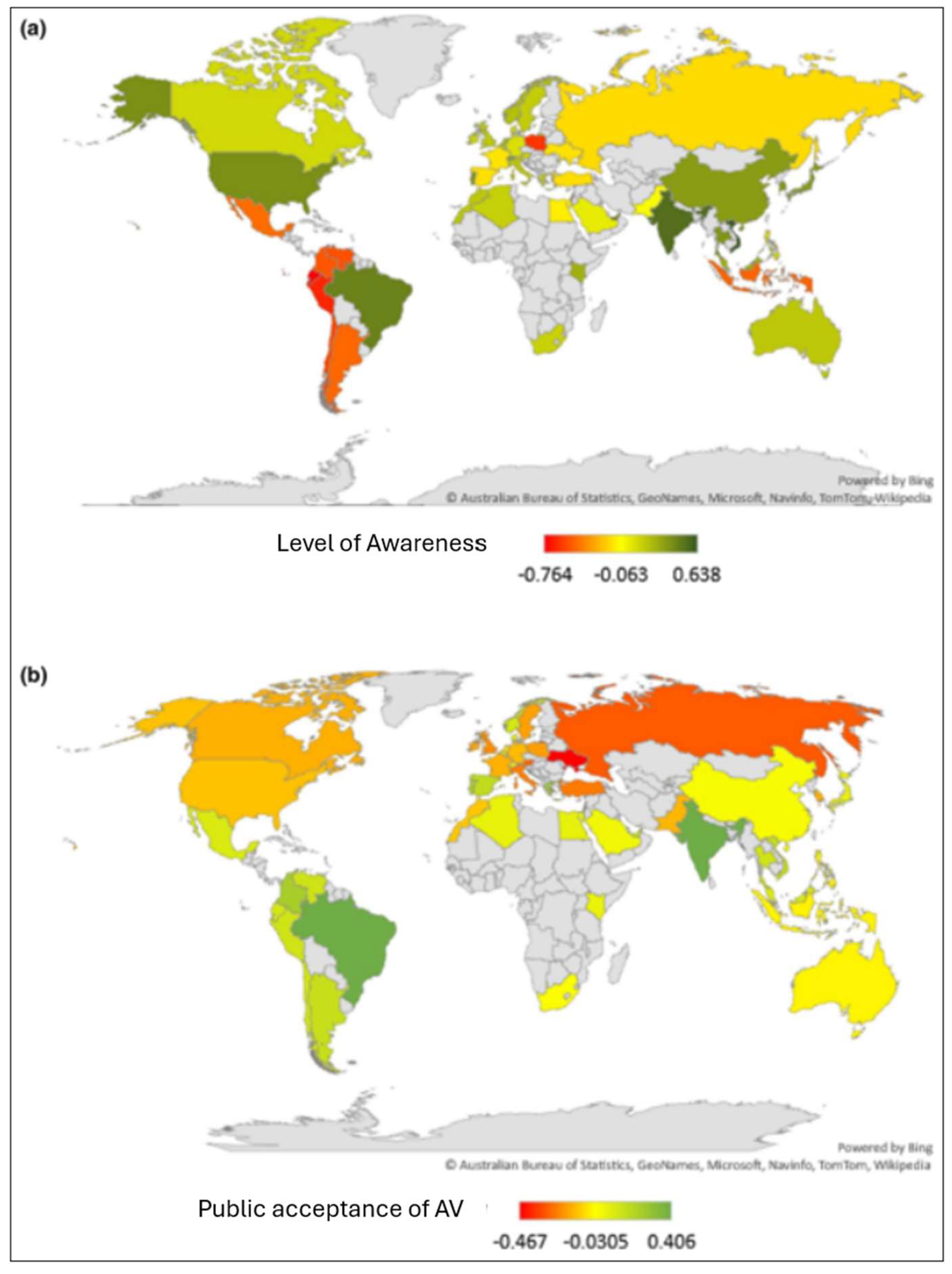
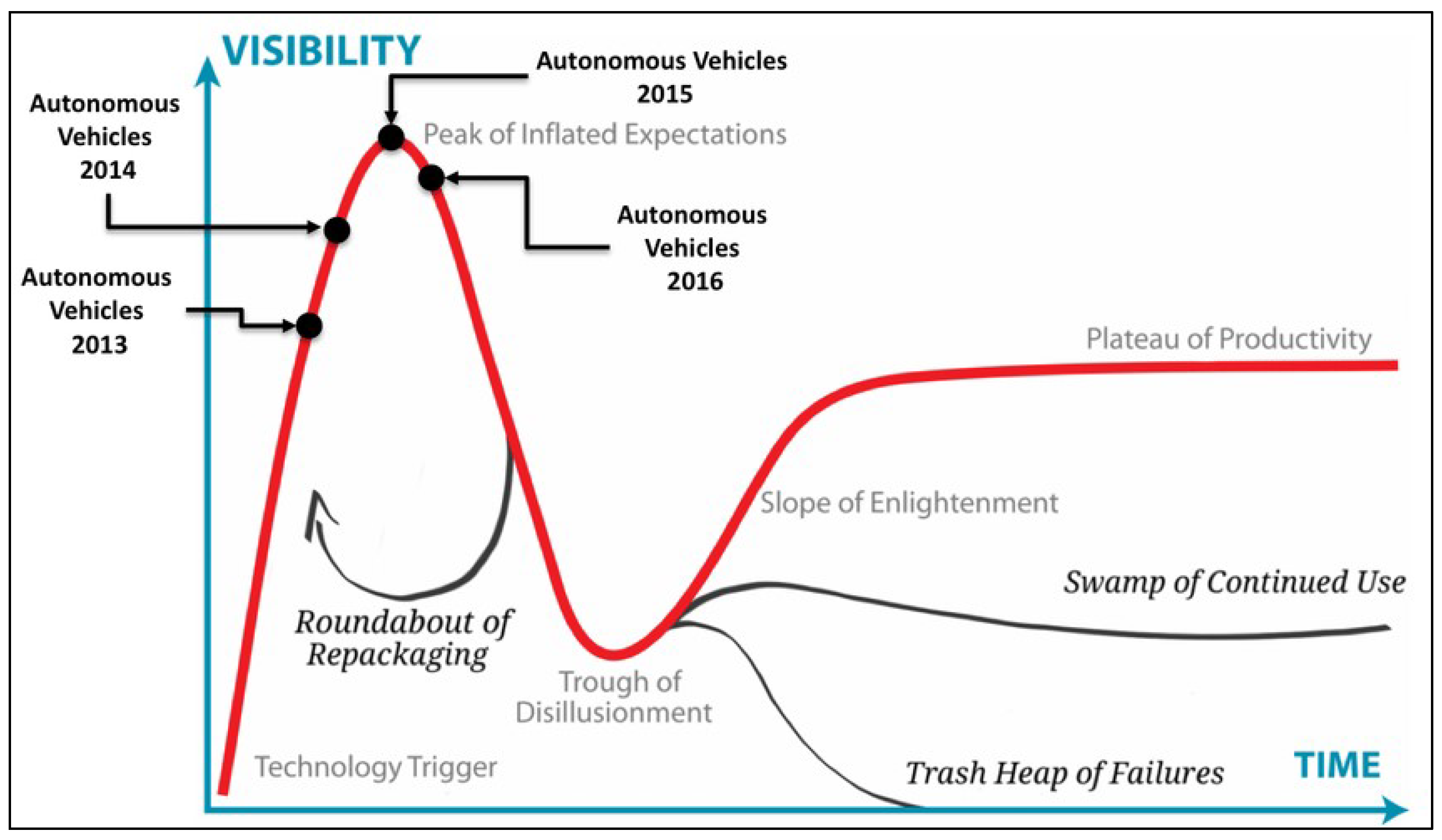
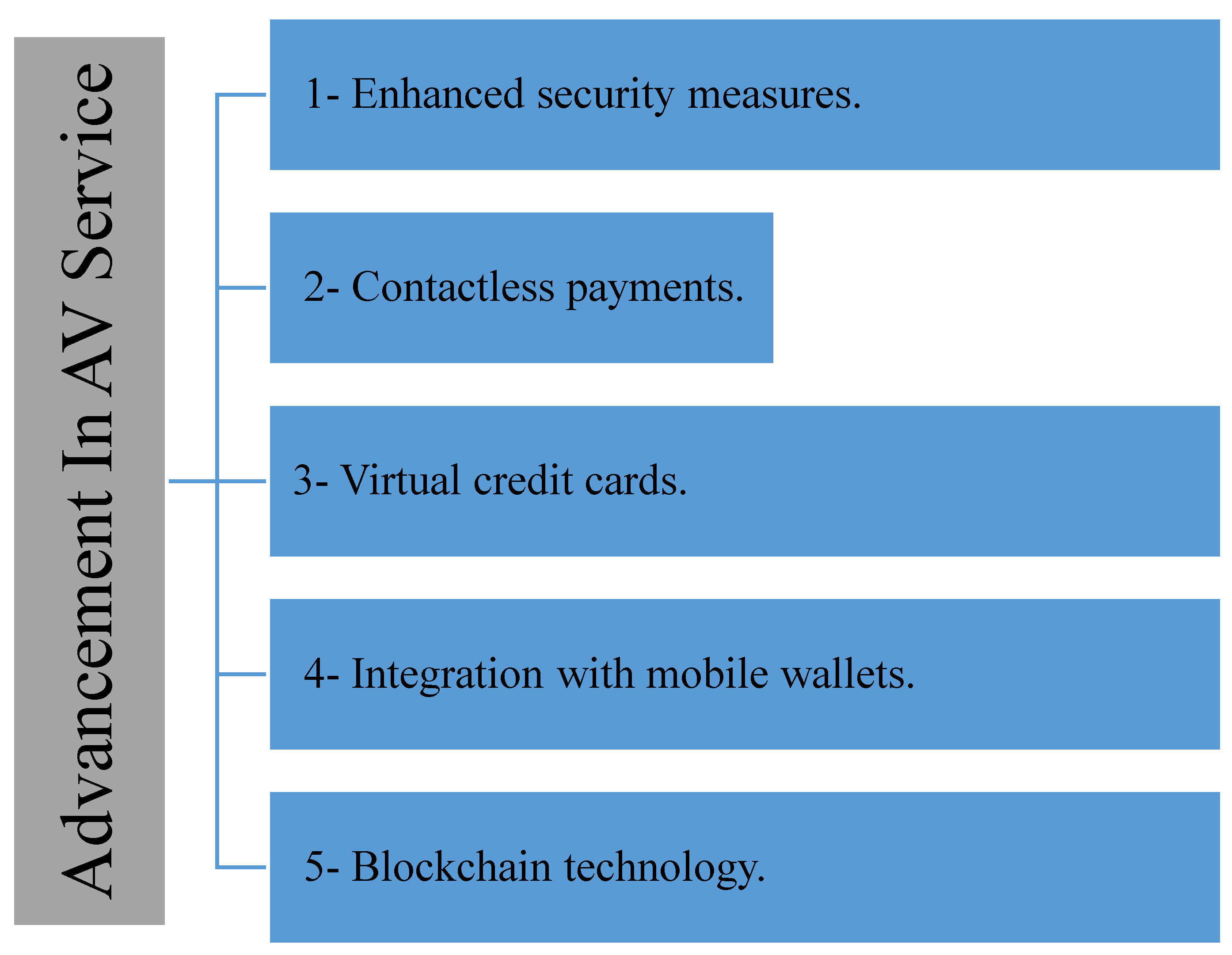
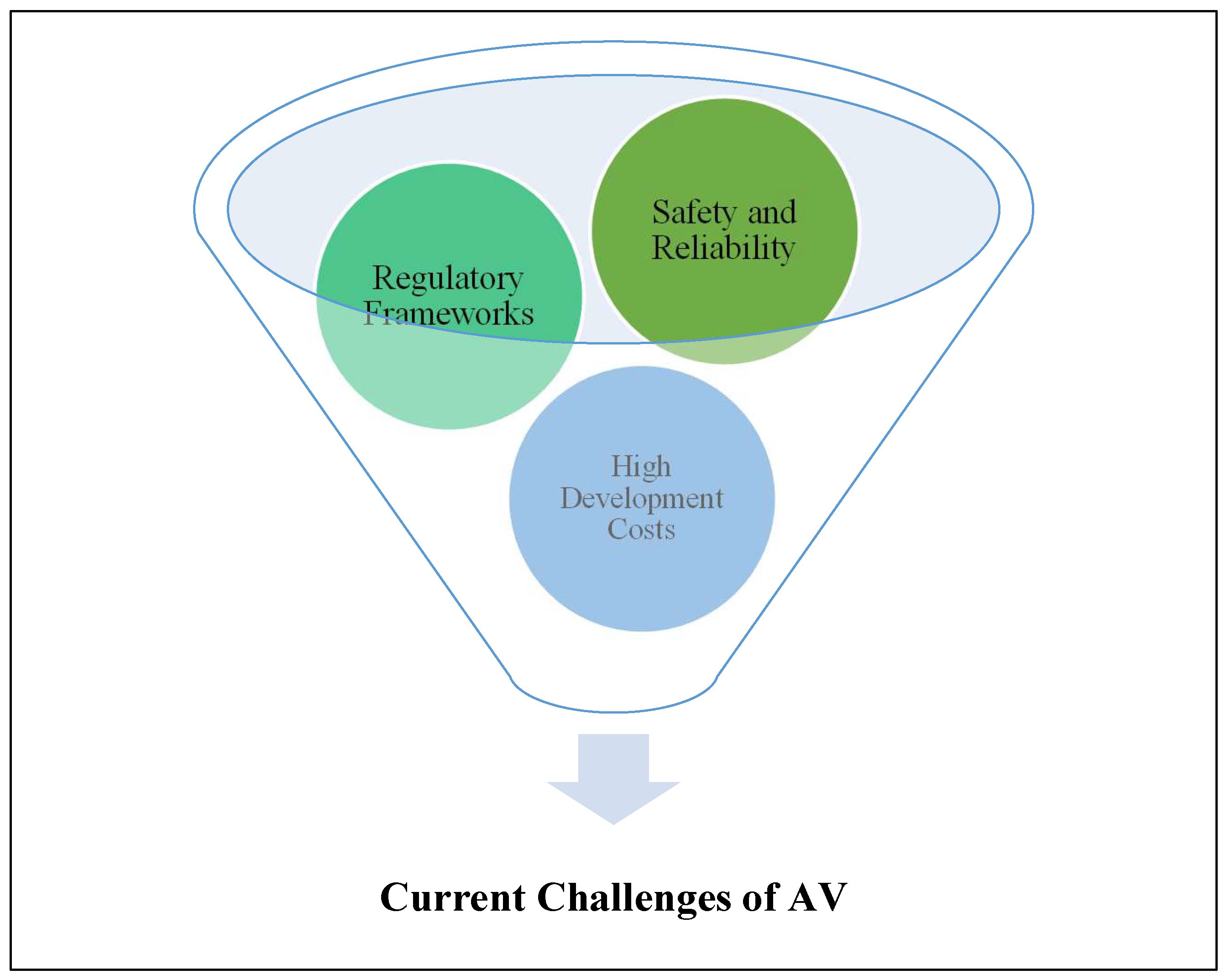
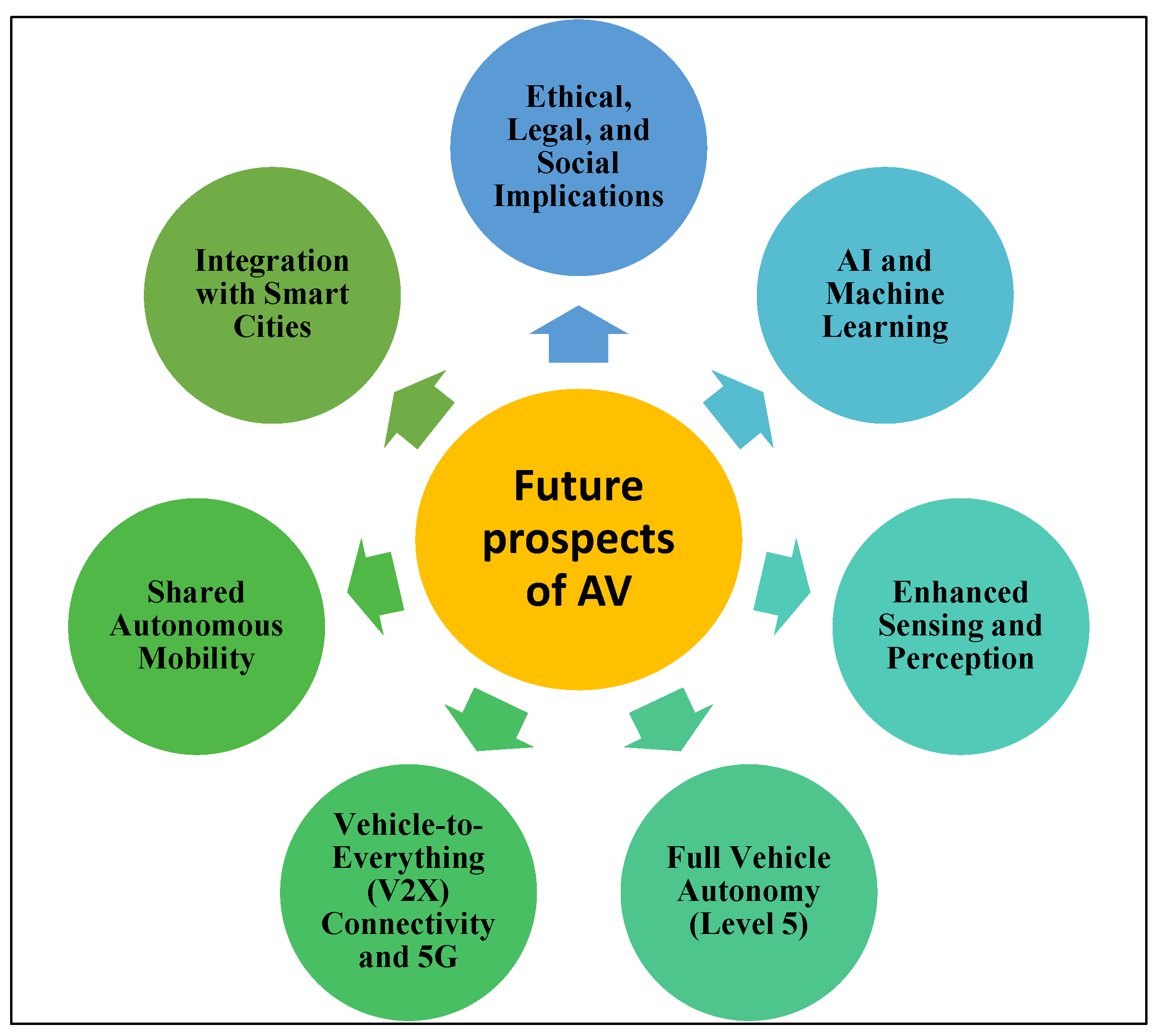
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).