1. Introduction
Harsh road weather conditions are among the key elements behind many traffic accidents. Meteorological service providers are forecasting road weather conditions with special weather models, like the Finnish Meteorological Institute’s (FMI) RoadSurf [
1], along with different types of road weather instrumentation implemented on board vehicles [
2,
3,
4] and roadsides as permanent instrumentation [
5,
6], or by using, e.g., CCTV camera data for predicting road weather conditions [
7]. Delivering road weather hazard-related warnings and forecasts for both road operators as a precaution and vehicles in traffic themselves has also been studied [
8].
The goal of the SafeTrucks project [
9] is to improve safety by providing warning and information data directly to heavy-vehicle drivers. The data are based on the real-time conditions of road weather, traffic entity, and the vehicle’s individual dynamic conditions. The driver is alerted about emerging risks before they turn into critical hazards.
The existing traffic environment possesses various risks. A truck falling off or a trailer rolling over the road due to an unexpected road condition change may happen, especially on smaller roads, where road maintenance is slow to respond. Accidents can cause traffic stops, detours in remote areas are often long, and the maintenance level can be low. General slipperiness warnings in vehicles tend to activate too often and too inaccurately to be taken seriously enough. Crosswinds represent a special risk not affecting normal passenger vehicles, but heavy-vehicle combinations would benefit from a specific warning, as it can be extremely risky for them.
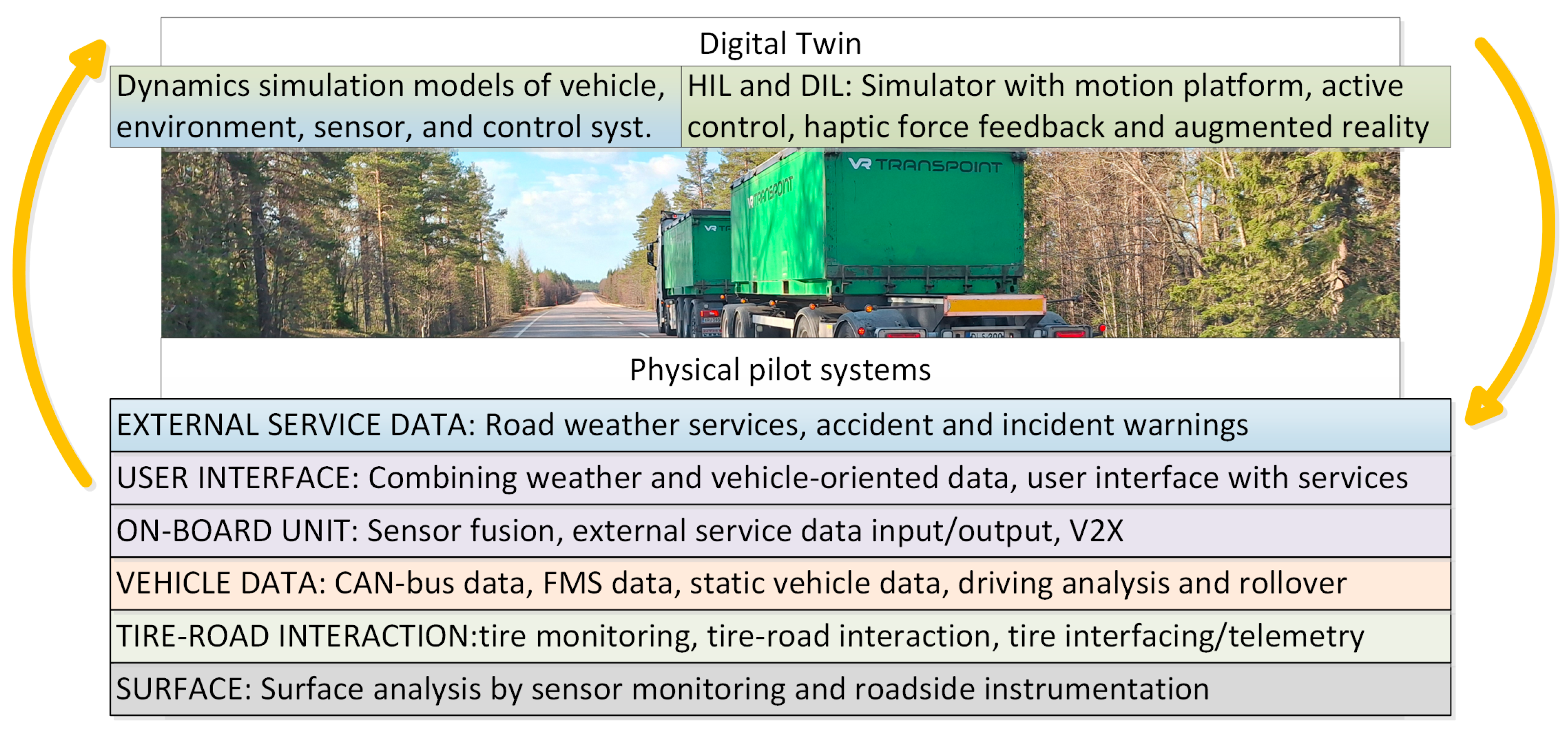
The project research objectives are shown in
Figure 1. At the high level, we have co-operative entities of physical pilot systems and Digital Twin entities, interacting with each other for mutual enrichment. In
Figure 1, starting from the top physical pilot systems in Finland, we collect a high variety of environmental and vehicle dynamic data from roadside instrumentation and analysis systems. This information is built into the up-to-date status of the vehicle entity and combined with road weather services and external areal warnings. As a result, we have a set of vehicle-specific tailored services presented on the user interface of each vehicle with informative warnings on, e.g., active braking distance for exceeded braking distance and trailer sliding/roll-over risk due to slipperiness or heavy crosswind. Special active control systems for the turning capabilities of very long trailer–vehicle combinations are developed by Canadian partners in simulation modeling. These are presented as service extensions within the Digital Twin traffic model, and they interact closely with the physical pilot systems operated by Finnish partners.
Related work on real-time weather warnings in traffic consists of warnings provided directly to the vehicles themselves, as well as through roadside information systems. Volvo has been collecting slipperiness-related data from Volvo vehicles into its service cloud and delivering slipperiness warnings through the cloud [
8]. This service is limited to Volvo vehicles only. Similar kinds of approaches are conducted by other vehicle manufacturers. Vaisala has been offering general road weather forecast data to several vehicle brands, including BMW. Recently, the development of these services has been concentrated into the concept of Vaisala XWeather, with the very latest achievement being Vaisala XWeather air-quality data access provided directly on the dashboards of BMW and MINI drivers [
10]. NordicWay 2 and NordicWay 3 are Cooperative ITS pilot projects that enable vehicles and infrastructure and network operators to communicate safety hazards and other information from roads in Nordic countries among different stakeholders [
11]. Vehicle-originated measurements are used to generate warnings, which are mostly delivered through roadside information infrastructure.
This paper gives an overview of the SafeTrucks project’s main architecture with a pilot system approach in Finland and a Digital Twin approach in Canada, focusing more on pilot systems. The project designs vehicle-tailored real-time safety services for heavy traffic, implemented in the pilot system operating in Finland and parallel Digital Twin entity developed in Canada during the project years 2023–2026. The main goal is to create advanced safety systems for improved traffic safety, especially under the harsh winter conditions typical both in Finland and Canada.
The rest of the article is organized as follows:
Section 2 overviews the architecture of the combined platform of pilot services and Digital Twin modeling.
Section 3 introduces the pilot services more in detail, along with the piloting strategy.
Section 4 presents the results of platform evaluation so far, in terms of V2X communications evaluation and practical evaluation of pilot services, with reference to Digital Twin work.
Section 5 summarizes the work so far.
2. Architecture
The general objective of the project is to enhance traffic safety and fluency by introducing pilot-level road weather services tailored to individual heavy vehicles and simulation models of heavy-vehicle enhancements for upgraded safety. It involves combining a vehicle’s on-board observations of its dynamics and environment with wide-area weather and safety services, which are also enhanced with vehicle- and roadside-inherited sensor data.
The real-time vehicle data that are based on the modelling of the vehicle’s dynamic behavior and are tailored for different types of trucks on the road are used to develop wide-ranging services. Autonomous vehicle exploitation of tailored weather and safety services will be evaluated in separate pilot testing scenarios.
Excessive research is focused on tire behavior in truck–trailer combinations under demanding winter conditions. Tire tread wear, effects of studs, pressure, and variations based on temperature are all considered to optimize tires, improve safety and efficiency, and reduce emissions.
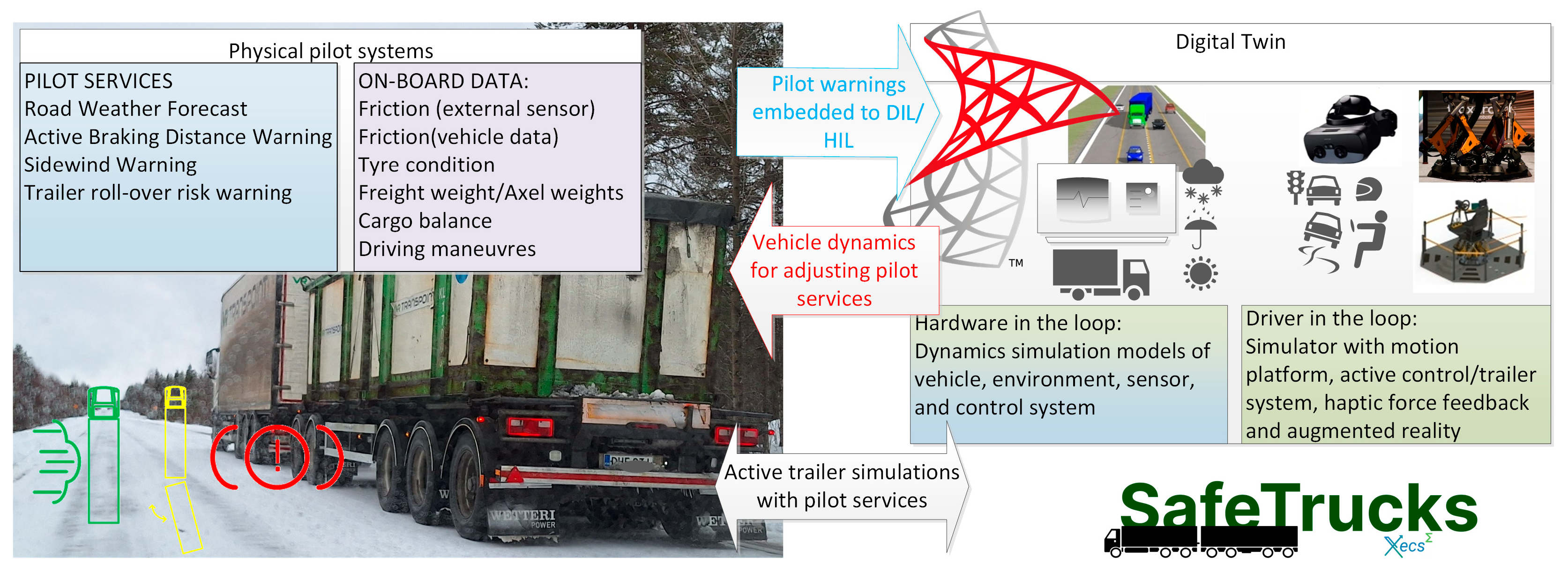
The envisioned SafeTrucks operation platform is presented in
Figure 2. Starting from the physical pilot systems, the on-board data are obtained with a high variety of sensor systems in different vehicle entities. At the tire–road interaction level, the on-board sensors installed on the tires give road interaction-related information on friction and tire condition. Vehicles’ own monitoring data come from CAN-bus, FMS data, and driving analysis systems, producing information about friction, weights, and driving maneuvers. External sensors and monitoring systems collect friction data but also cargo balance information. An on-board unit with V2X communication capabilities combines these data, exchanges them with external service data systems (especially road weather and safety service systems of the FMI), and receives up-to-date, localized weather and safety data. These data are further tailored based on vehicle-specific dynamic information to present vehicle-specific warnings in the user interface of the vehicle. Accurate safety-related alerts will only be presented in the area where they emerge and in a way that does not disturb driving operations.
In the piloting with an operative third-party commercial fleet, communication is limited to the public 4G/5G cellular network. This ensures service availability in public roads and the cost-effective composition of the piloting environment into a single tablet. Thus, a minimum amount of configuration is required for the operative vehicles and their driving environments. This is essential when co-operating with the operative vehicles of VR Transpoint company (or any company) so as not to cause any harm or extra delays under any circumstances. However, we are also interested in evaluating the possibility of employing other V2X communication systems in our concept. In addition to the fact that cellular communication possesses operator costs that are significant in a full-scale operative environment, they can have local deficiencies in coverage area and can be, in short-range distances, clearly slower than local area networking-based solutions. We are investigating the possibility of using other V2X communication approaches (along with 5G communication, representing a linear communication approach for the operative fleet pilot system) in our winter test track entity and draw a comparison among the alternative solutions. This study is an important proving ground for estimating the feasibility of the alternative communication solutions in very practical scenarios and for providing a justification of technological developments and investments of cooperative communication systems within forums like the Car 2 Car Communication Consortium [
12].
Special active control systems for trailer–vehicle combinations are developed by Canadian partners in Digital Twin simulation modelling, with Hardware-in-the-Loop (HIL) and Driver-In-the-Loop (DIL) modelling. The special interest in Digital Twin modelling is the concept of active trailer for heavy vehicles and tractors. At the time of writing this article, the Digital Twin models in Canada were not yet ready to be used as a testbed of pilot services or as the source of vehicle dynamic data for pilot service fine tuning.
The base of the platform is a system providing real-time vehicle-specific warnings and services based on weather forecast data, sensor data, and models of the vehicle’s dynamic behavior. These data are used to enhance the accuracy of the real-time road weather services of the FMI and Canada’s Digital Twin entity along with HIL and DIL modelling. The weather services are tailored for special vehicle environments that include heavy vehicles and autonomous vehicles. The first pilots in Finland include information on trucks’ braking distance and warnings of heavy crosswind and trailer roll-over/sliding. In parallel, the Digital Twin model in Canada creates HIL and DIL simulation models of heavy-vehicle traffic situations, especially focusing on the concept of active trailer for heavy trucks and tractors. The active trailer system allows for the smooth cornering of very long heavy-vehicle combinations, commonly used in Canada. In the SafeTrucks project, this active trailer system will be developed at the concept level within a Digital Twin entity. Also, the pilot services of physical pilot systems in Finland will be exported to the Digital Twin modelling entity for evaluating performance with an active trailer. At the same time, an active trailer combination will be evaluated as potential end user equipment of physical pilot services (although not yet available as physical instrumentation). Active trailer system analysis is the key objective, but the road weather services piloted in Finland will be also embedded in the HIL and DIL simulations to evaluate their operability in such a special environment, as well as active trailer concept adaptation to exploit the services. The Canadian project team is also collecting historical and live data to develop a predictive road analysis Digital Twin system, which can be used for planning, scheduling, dispatching, procurement, and risk analysis.
3. Pilot Services
The FMI provides a variety of weather- and safety-related services for all the citizens and society of Finland. The FMI has also a long history in the development of vehicular road weather services, especially for harsh winter conditions. The main objectives of SafeTrucks are the further development of road weather services based on available data sources and the tailoring of road weather services for heavy vehicles that require sophisticated warnings. All possible friction estimates based on the on-board data are collected to enhance road weather services. The delivery of updated services (and the collection of vehicle data) is conducted with standard cellular networking. However, the possibility of using other existing V2X communication systems (in the case of the wide penetration of communication services in some specific area, or in the future) is analyzed and evaluated in the intelligent traffic winter test track of the FMI [
13]. The comparison of V2X communication alternatives stands as an important evaluation of V2X communication system efficiency in operative usage scenarios.
The concept of tailored road weather services has already been studied within autonomous vehicles. In the preliminary model [
14], there are four driving mode (1–4) suggestions based on the estimation of sensors’ weather dependency, later fine-tuned for more accurate suggestions. In the SafeTrucks project, tailoring is targeted at heavy vehicles with human drivers, which changes the structure of the services. Instead of suggesting driving modes, specific alerts are provided with accurate vehicle-specific estimates of the risk, which are based on vehicle dynamics combined with local weather conditions.
Within the vehicle, the collected dynamic information is combined with road weather data in the vehicle on-board unit, which produces vehicle-specific real-time braking distance alerts and side-wind and trailer roll-over/sliding risk. The service concepts are outlined in
Table 1. The key element in every service is road friction
μ, which is forecasted in the FMI’s Roadsurf weather model and in SafeTrucks observed with on-board friction measurements with RCM 411 (Teconer, Helsinki, Finland) and MD30 (Vaisala, Vantaa, Finland) instruments. The equation for braking distance is presented in [
15], presenting braking distance s as
where
v is the vehicle speed,
g is standard gravity, and μ is the friction. The braking distance alert is directly inherited from this calculation, with threshold values being based on braking distance measurements overviewed later in the following sub-chapter and safe braking distance pre-analysis (to be fine-tuned based on experience during our piloting).
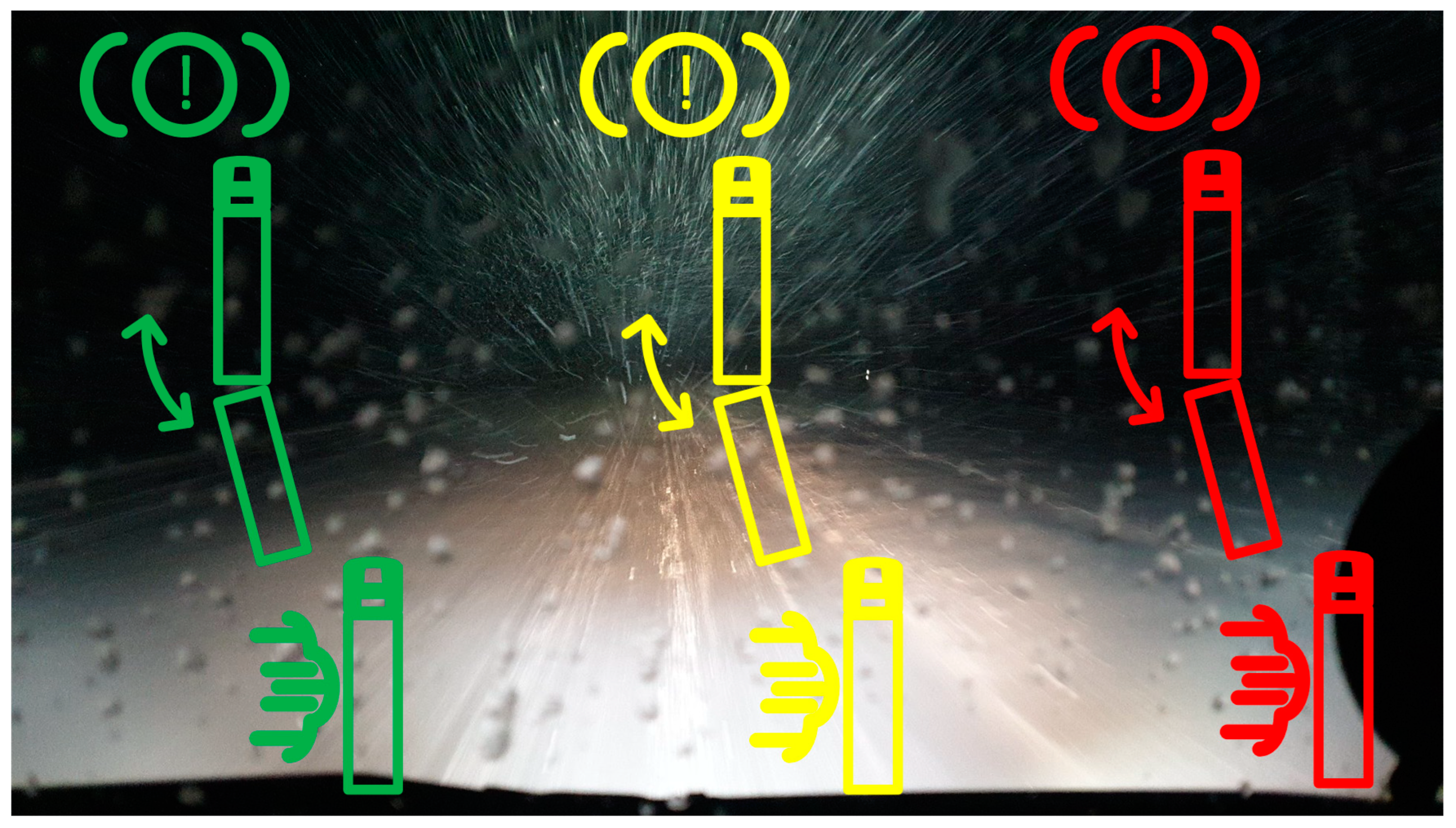
The active braking distance alert presents a color-coded warning related to the real-time estimate of braking. The red color presents the longest braking distance and the highest risk. For example, with a normal-sized passenger car, the braking distance under dry-asphalt conditions at a 60 km/h speed is roughly 14 m, while with a truck–trailer combination weighing 70 tons, the distance is already 70 m under winter conditions [
16]. Higher speeds increase the distance exponentially. These estimates exclude the reaction time, typically around 1 s, which significantly increases the actual stopping distance under slippery winter conditions. Our heavy-vehicle active braking distance warning will be presented in green font when the distance is, for example, less than 100 m, yellow font when it is between 100 m and 150 m, and finally red when it is above the latter. These are the preliminary estimates of proper warning levels and will be further analyzed within the project. With smaller vehicles, the levels are completely different.
The second service, side-wind warning, is more complicated to define. The risk of side wind affecting the truck is a combination of truck and trailer physical dimensions (the wind surface), the weight of the vehicle and trailer, the wind speed and direction, and the geographical structure of the road. The last topic refers to the fact that locations like a road passing from a forest area to a field or from a big building-fenced area to a bridge present potentially higher risks of sudden wind gusts. Again, color coding is used for the warning level. Detailed triggering-level evaluation will be carried out within the project. The service will be generated based on road weather forecast data of friction and wind, specifically tailored to wind-risk locations of monitored road stretches, with weather radar and/or road weather station measurement data as a supplement whenever available. We are using two road weather station positions (one of them in our closed test track for evaluation purposes) and seven additional pre-defined wind-risk positions to further analyze the service. The on-board vehicle data analyzed so far have not been found appropriate for this service, as on-board wind sensors are too expensive and complicated to maintain, and vehicles give data that are too inaccurate to be used for this purpose. Additional data sources will be further analyzed within the project.
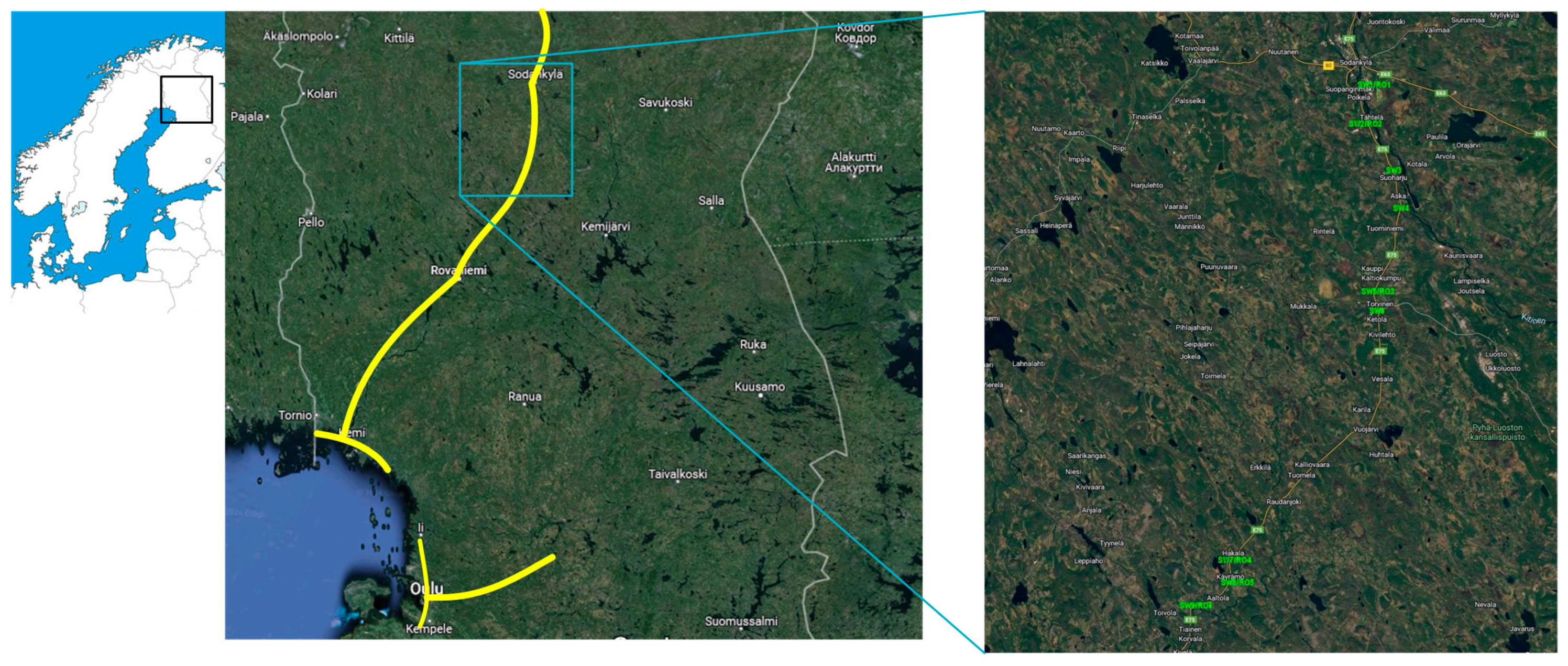
The third and final pre-defined example service is trailer roll-over/sliding risk, which is rather similar to the side-wind warning. The meaningful parameters are the tight corners on the road, the speed and the weight of the vehicle and trailer, the measured and forecasted road weather and friction μ, the tire conditions, and the lateral movement of the trailer and the vehicle. On-board data sources are any tire-originated information related to sliding (to be defined within the project) and trailer load-balance measurements generated by the project partner during the project. Again, the triggering levels cannot be presented directly as simple numbers, but detailed triggering-level evaluation will be performed within the project. For roll-over/sliding warning, we have defined five locations (plus one in the test track for evaluation) with tight corners on the road, into which to generate pilot warnings and perform the analysis of the operation. Additional data sources will be searched for and further analyzed within the project. The sketch of services in three levels is presented in
Figure 3. The piloting locations of services are shown in
Figure 4. Road weather service and braking distance service areas are shown on the left-side image and side-wind (SW) and trailer roll-over (RO) warning locations on the right side.
The second and third services could also be presented as a single service, but in that case, we would lose information about special cases, for example, when there is a trailer roll-over/sliding risk due to a tight corner, slipperiness, and the condition of tires or a side-wind warning due to an unloaded high-dimension vehicle combination. The plan is to develop a collective set of road weather and safety services that will be ready to be integrated into commercial vehicle fleets and tailored for different special purposes, like heavy vehicles, general road users, and autonomous vehicles. We are also developing underlying road weather services. One development step has already been taken by publishing parts of the FMI road weather model as an open-source library [
1].
4. Results
4.1. V2X Communication Measurements
Operative pilot systems in Finland are using commercial 4G/5G communication in the data exchange between vehicles and the service core. In our communication tests on the Sodankylä test track, shown in
Figure 5, we also considered the possibility of exchanging data with short-range vehicular networking (in our case, ITS-G5 and C-V2X) along with 5G communication tests. Our objective is to evaluate the service operability in the case where short-range vehicular networking capabilities would also be available on the public roads, as well as to evaluate the performance of different V2X communication methods in our special use cases. Parallel with our public road pilot services and side-wind and trailer roll-over warnings for specific locations, we have also created single locations of these services for our test track for communication test purposes.
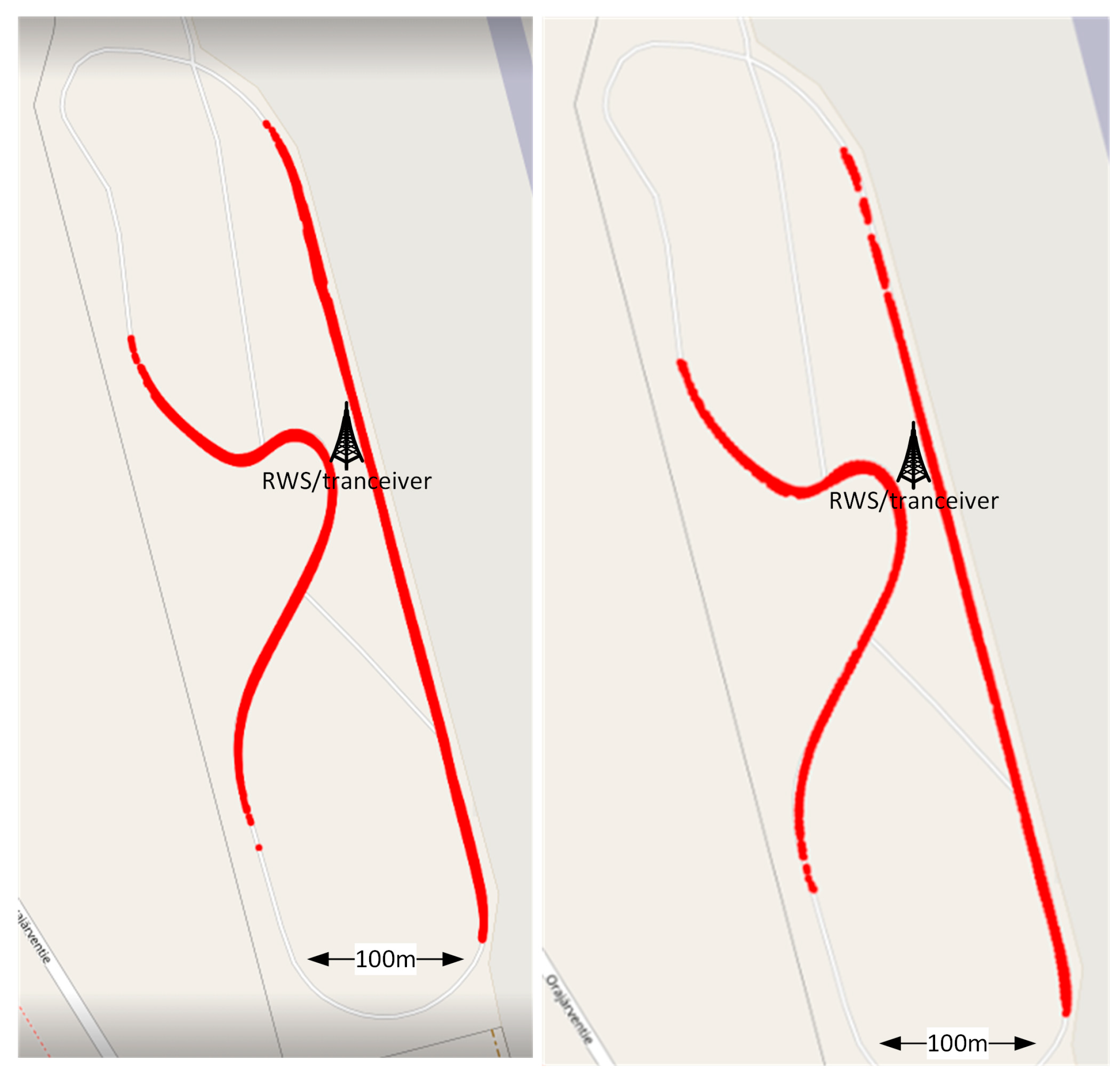
We followed similar procedures in both ITS-G5 and C-V2X communication tests: the vehicle circled the test track and received a simple (warning) data packet sent from a transceiver located in RWS2, whenever in the range of the transceiver. Naturally, the procedure was the same with 5G measurements, but in this case, the communication range was not an issue, as the test network covered the whole test track entirely. The range of communication for both ITS-G5 and C-V2X tests is presented in
Figure 6; it consists of “red dots” that indicate single communication points where the data packet was received and form a continuous red line when there are a lot of overlapping dots from consecutive test laps. There is no difference between the ranges of ITS-G5 and C-V2X. As stated, the 5G network has complete coverage throughout the track.
In the ITS-G5 communication tests, we were able to measure both communication throughput and latency in separate tests. The throughput test consisted of four drive laps, presented as rows in
Table 2. The latency test consisted of ten drive laps, presented in
Table 3. In the C-V2X communication tests, we could not capture the throughput of communication due to the black-box nature of the C-V2X entity. However, calculating the number of transmitted packets and their size does not allow for obtaining a fair estimate of the throughput, as the exact size of the transmitted C-V2X packet is not known. Therefore, we were only able to measure the latency in C-V2X communication (
Table 4). Finally, the 5G communication test results are shown in
Table 5. The laps were not separated in this test due to the continuous connectivity separating laps not being considered relevant. Therefore, both throughput and latency from all drive laps were collected into a single measurement session.
In our tests, ITS-G5 communication achieved an average of 4.24 Mbps throughput, compared with 6.16 Mbps in 5G. In the 5G test network, the uplink bandwidth was limited to 10 Mbps, which explains the relatively low throughput (compared with the 5G theoretical capacity). The communication capacity was enough to properly deliver pilot service data even with ITS-G5, as well as with C-V2X (even if we could not define accurate throughput values). The latency tests presented 5.49 ms average latency for ITS-G5, 29.11 ms latency for C-V2X, and 35.11 ms with 5G communication. The 5G test network suffered from the structure of our test network, as the core was in VTT facilities 350 km single-direction distance away and behind several routers, which caused serious additional round-trip delays. Having the network core (or edge) in our test track facilities is expected to drop the latency down to the same level as ITS-G5.
4.2. Practical Evaluation of Pilot Services
The pilot services are to be evaluated by an operative heavy-vehicle fleet in a real traffic environment by using the services continuously during the operative drive. The main operative fleet is hosted by VR Transpoint, whose trucks carry mining goods from Kevitsa mine located to the north of Sodankylä into Kemi harbor. The route is shown in the left-hand side map in
Figure 4 (the northernmost one of the two routes). VR Transpoint has been co-operating with the FMI through this fleet since 2017, when the FMI deployed on-board road weather sensors on several trucks on this route. The observations were used to provide a specific enhanced route weather in the Intelligent Arctic Trucks project [
10]. In the SafeTrucks piloting, the two vehicles, still having on-board road weather sensors (RCM 411 (Teconer, Helsinki, Finland) [
2]), have the SafeTrucks user interface application integrated into the data collection unit. They collect road weather data from the route to enhance the SafeTrucks pilot services data but also use the pilot services as end users. A similar kind of system has been prepared for two trucks hosted by Neste and the Lappia institute, which operate in the Oulu and Kemi areas (the southernmost routes in the left-hand side map in
Figure 4). These trucks are equipped with MD30 (Vaisala, Vantaa, Finland) road weather sensors [
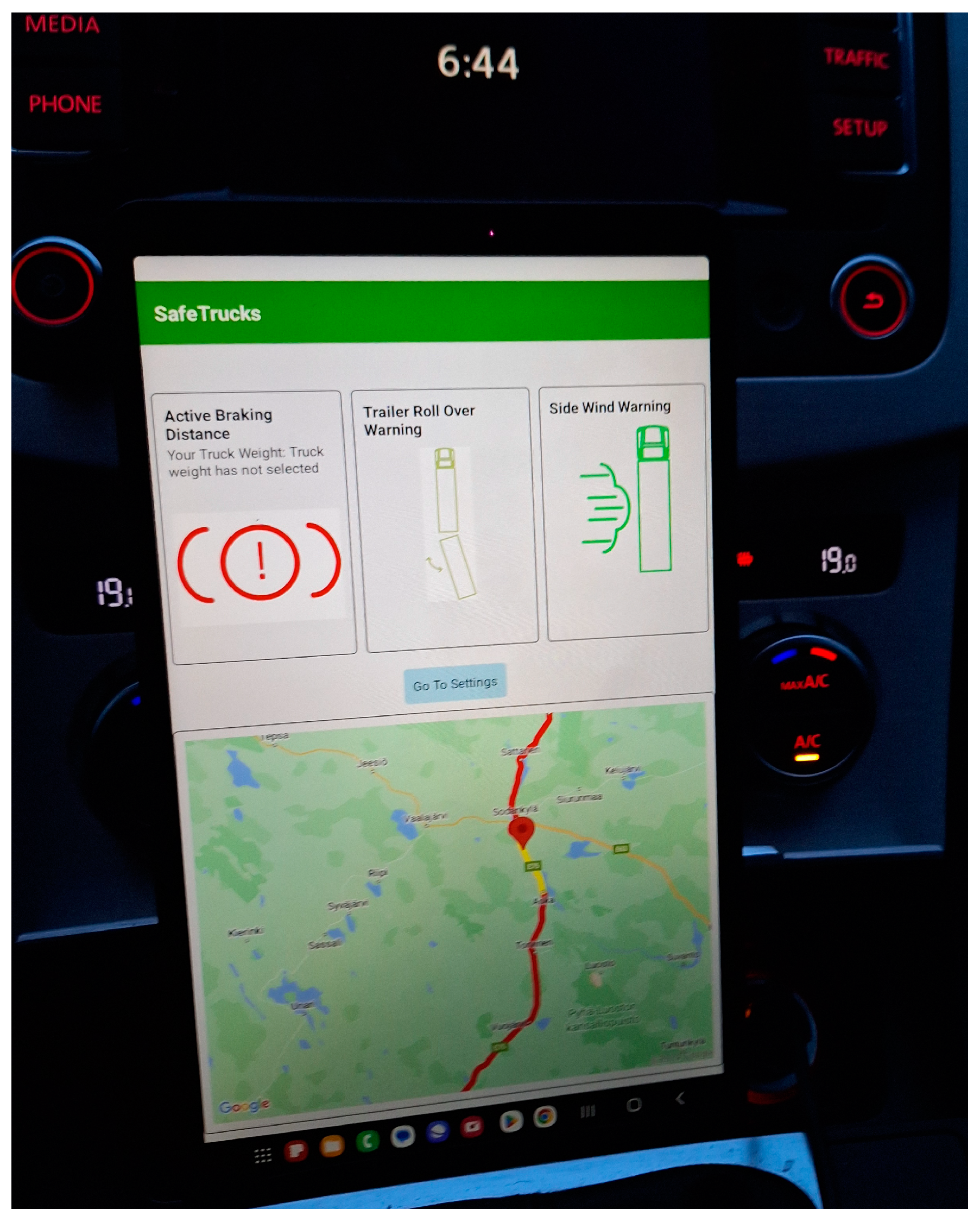
4] and Sensior system (Taipale Telematics, Tampere, Finland) as the on-board data system. In addition to these, several VR Transpoint trucks are equipped with pure end user systems with just a user interface tablet pc device for pilot services. The user device with the pilot service user interface is shown in
Figure 7 below. The Android-based user application has parallel interfaces for collecting (Bluetooth-interfaced) on-board measurement data from the vehicle and presenting the user interface for the pilot services. On-board measurement data are delivered to the road weather service core, and in exchange, the up-to-date weather and warning data are delivered to the vehicle. The color-coded road weather index is presented continuously on route, while the three warnings are presented only when the warning conditions are fulfilled. The braking distance warning can be activated at any location on the route, while the side-wind and trailer roll-over/sliding warnings are activated at pre-defined locations, defined in
Section 3, if necessary. In
Figure 7, all warnings are active simultaneously, which has already been found to be chaotic for the end users. In the current version, only one warning can be activated at the time, but for illustration purposes,
Figure 7 contains them all. The vehicle weight is pre-defined in loaded and unloaded states, and the driver chooses the proper load option when starting. The supplemental parameters are added during the pilot process and when new data sources are being interfaced to the pilot system.
The pilot services were in operation only during autumn 2024, so there is no experience of using the services under any winter conditions yet. We have requested user experience comments from the drivers, but it is obviously a very initial phase, and they focus on practical user interface issues. The map view in the user interface should be larger, especially when there are no active warnings. The warnings themselves tend to be active simultaneously, which is confusing for the driver. Specifically, the side-wind and trailer roll-over/sliding warnings are found to be too sensitive. This is expected feedback, as the approach was to start with the sensitive mode to test the warning system. The fine tuning of services continues through online updates of the application, and more sophisticated feedback will be collected later.
4.3. Digital Twin
At the time of writing this paper, there was no evaluation information available from Digital Twin simulations yet. The Digital Twin modelling of an active truck trailer and an active tractor trailer is progressing based on Software-in-the-Loop (SIL) simulation entity composition work between CM labs and NRC-CNRC; Hardware-in the-loop (HIL) active control system development for Active Trailer Steering (ATS) at CM labs, NRC-CNRC, and Simard Suspensions; and a Driver-in-the-Loop (DIL) simulator software framework with motion and haptics software for truck construction at Traxara Robotics, NRC-CNRC, and CM labs. The evaluation results from these systems will be presented and analyzed when available, in future publications.
5. Discussion
Heavy-vehicle–trailer combinations are vulnerable to severe winter weather conditions, and when facing accidents, they are always at higher risk of causing fatalities and material damage or total traffic stops. Even if safety in traffic and among heavy traffic is at a relatively good level, we are still way behind “vision zero”, the target of zero fatalities in traffic, highlighted by both the European Union and the Car 2 Car Communication Consortium [
12]. The SafeTrucks project targets to reduce these risks by introducing more sophisticated road weather and safety services tailored individually to each heavy-vehicle unit and its dynamics. We have generated a set of pilot services for heavy-vehicle–trailer combination entities, which are presented in a special user interface within a tablet pc and evaluated throughout the project.
This paper overviews the general approach of the project, the system architecture with pilot vehicular services, and very preliminary evaluation results of the pilot system and related tire and communication entity evaluation. It has been seen that the communication with cellular networks (4G/5G) is suitable for this kind of operation, presenting enough capacity, very sufficient coverage (at least in Finland), and easy adaptation. However, the authors also see added value in V2X local area networking operations, especially if they can be employed as parallel hybrid communication solutions of cellular communications, a concept studied by authors in previous works. Hybrid V2X communication would allow for operator cost-free data exchange with roadside units and slightly shorter delays in warning delivery in short ranges, in the case of vehicle-to-vehicle direct delivery. The current level of services does not benefit from hybrid communication, but it would enable serious improvements in existing scenarios, as well as entirely new ones.
The services at their current level constitute a very preliminary view of what we can achieve with vehicle-level tailored services with way more sophisticated knowledge on heavy-vehicle dynamics and the real-time condition of wearable parts and sensors. Future work consists in fine tuning the services from this perspective, in co-operation with the Digital Twin entity. Special focus is on tire–road interaction, for which we can achieve sophisticated knowledge from our project partners Nokian Tyres and the University of Oulu Machine and Vehicle Design group. Pilot services are also operating through the winter season and under harsh winter conditions, ultimately showcasing their added value. The authors find the concept of real-time weather and safety data brought into heavy vehicles and presented/adjusted with knowledge of the vehicles’ own real-time operative status a very interesting one, holding a lot of potential for future safety improvements. The results so far are already very promising, and it is safe to say that we are one step closer to the ultimate goal, vision zero in traffic fatalities.
Author Contributions
T.S. and K.M.; Methodology, T.S., H.H., M.H. and V.K.; Software, H.H.; Validation, K.M., A.P., M.H. and V.K.; Formal analysis, A.P. and V.K.; Data curation, K.M. and A.P.; Writing—original draft, T.S.; Writing—review & editing, M.H. and V.K; visualization, T.S.; supervision, T.S.; project administration, T.S.; funding acquisition, T.S. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Business Finland, grant number 7157/31/2022.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Acknowledgments
This work is supported by Business Finland and the Eureka Xecs program. The authors wish to thank our partners in the project from the Finnish Meteorological Institute, University of Oulu, Nokian Heavy Tyres, Ahola Transport, Neste, and Taipale Telematics in Finland and NRC-CNRC, CM-Labs, Simard Suspensions Inc., Traxara Robotics Inc., Manac Inc., Micro Engineering Tech., Inc., and Vehicle Technology Centre in Canada.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Karsisto, V. RoadSurf 1.1: Open-source road weather model library. Geosci. Model Dev. 2024, 17, 4837–4853. [Google Scholar] [CrossRef]
- Teconer. Road Condition Monitoring Sensor RCM 411; Technical Report; Teconer: Helsinki, Finland, 2016. [Google Scholar]
- Teconer. Road Condition Monitoring Sensor RCM 511; Technical Report; Teconer: Helsinki, Finland, 2021. [Google Scholar]
- Vaisala. Vaisala Mobile Detector MD30, Product Spotlight; Vaisala: Vantaa, Finland, 2024. [Google Scholar]
- Vaisala. Road Weather Station RWS200 for Roads, Rail, and Runways. Vaisala RWS200 Product Catalog; Vaisala: Vantaa, Finland, 2021. [Google Scholar]
- Johns, D. High Density Observation Network for Near Real Time Detection of Hail Events; TRA: Dublin, Ireland, 2024. [Google Scholar]
- Fior, J.; Cagliero, L. Correlating Extreme Weather Conditions with Road Traffic Safety: A Unified Latent Space Model. IEEE Access 2022, 10, 73005–73018. [Google Scholar] [CrossRef]
- Volvo Cars Press Release. Volvo Cars Puts 1000 Test Cars to Use: Scandinavian Cloud-Based Project for Sharing Road-Condition Information Becomes a Reality. Volvo Cars Global Newsroom. Available online: https://www.media.volvocars.com (accessed on 23 April 2024).
- Sukuvaara, T.; Mäenpää, K.; Honkanen, H.; Hippi, M.; Karsisto, V. Road Weather and Safety Services Tailored Individually to Heavy Vehicles; TRA: Dublin, Ireland, 2024. [Google Scholar]
- Vaisala XWeather. Available online: https://www.xweather.com (accessed on 19 April 2024).
- NordicWay. Available online: https://www.nordicway.net/ (accessed on 19 September 2024).
- CAR 2 CAR Communication Consortium. Available online: https://www.car-2-car.org/ (accessed on 2 September 2024).
- Sukuvaara, T.; Mäenpää, K.; Perälä, T.; Hippi, M.; Rimali, A. Winter testing track environment for the intelligent traffic road weather services development. In Proceedings of the 20th International Road Weather Conference—SIRWEC2022, Druskininkai, Lithuania, 14–16 June 2022. [Google Scholar]
- Sukuvaara, T.; Mäenpää, K.; Perälä, T.; Stepanova, D.; Hippi, M. Enhanced Road weather services tailored for autonomous vehicles. In Proceedings of the PIARC 2022 XVI World Winter Service and Road Resilience Congress, Virtual Conference, 7–11 February 2022. [Google Scholar]
- Šarkan, B.; Holeša, L.; Ivánek, P. Measurement of the braking distance in dependence on the momentary vehicle weight. Transp. Commun. 2013, 1, 29–32. [Google Scholar] [CrossRef]
- Pirnes, V.; Tuutijärvi, M.; Haataja, M. HCT-Puutatavarayhdistelmien Ajoseuranta ja Stabiliteettitutkimus, Yhdistelmien Liikkuvuus ja Ajovakaus; Mechanical Engineering, Report 5; University of Oulu: Oulu, Finland, 2018; Available online: http://urn.fi/urn:isbn:9789526221441 (accessed on 5 February 2024).
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}