
Adaptive Transmission Suspension of V2N Uplink Communication Based on In-Advanced Quality of Service Notification


Abstract
:1. Introduction
- Propose a specific algorithm to adaptively assess the volume of transmitting data on a vehicle side using IQN.
- Construct a method to improve the network performance of uplink V2N communication using IQN.
- Show that the congestion can be reduced by utilizing IQN during heavy network traffic.
2. Related works
2.1. Scheduling Method
2.2. Congestion Control Method
2.3. Handover Method
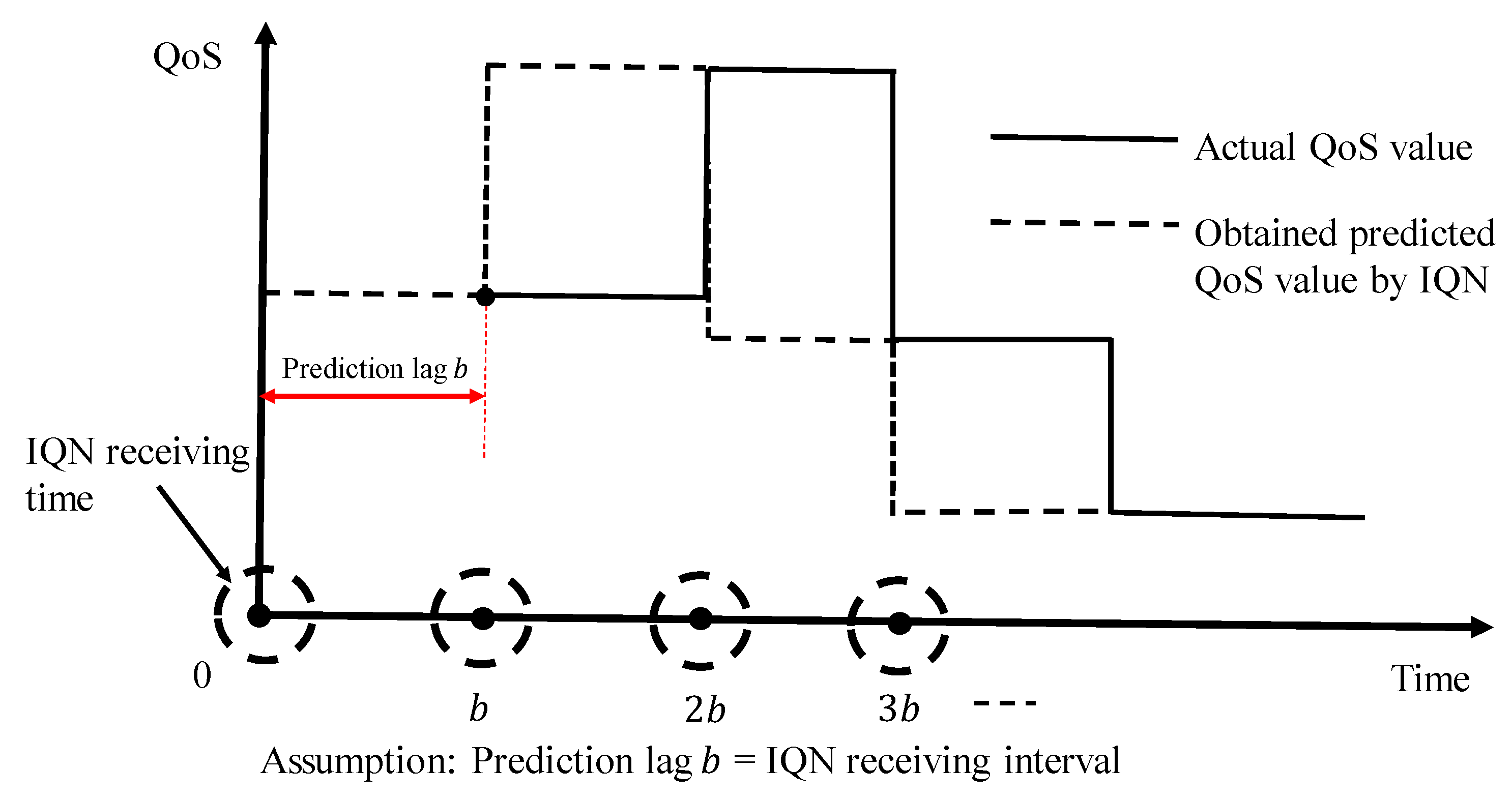
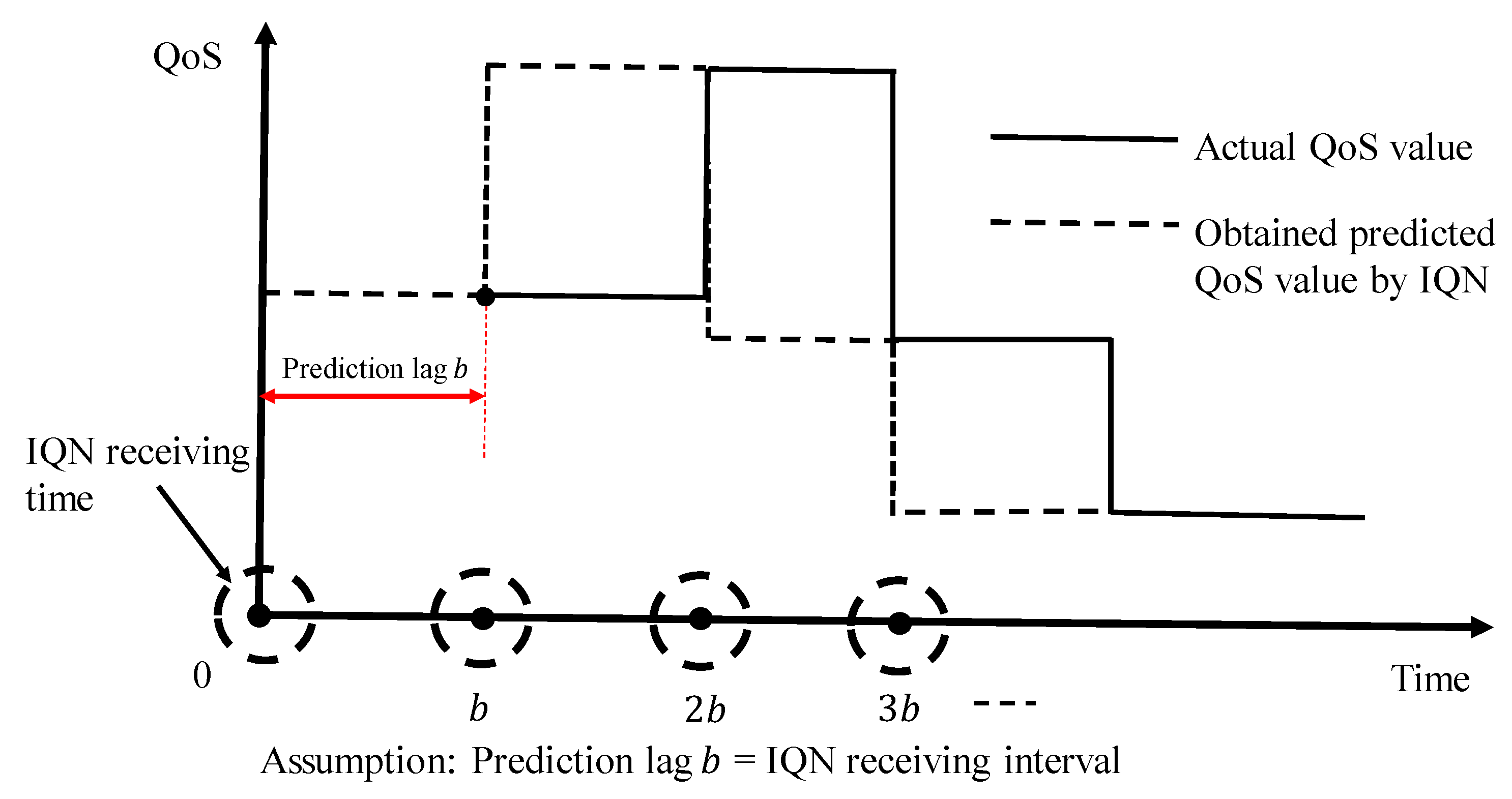
2.4. In-Advanced Quality of Service Notification
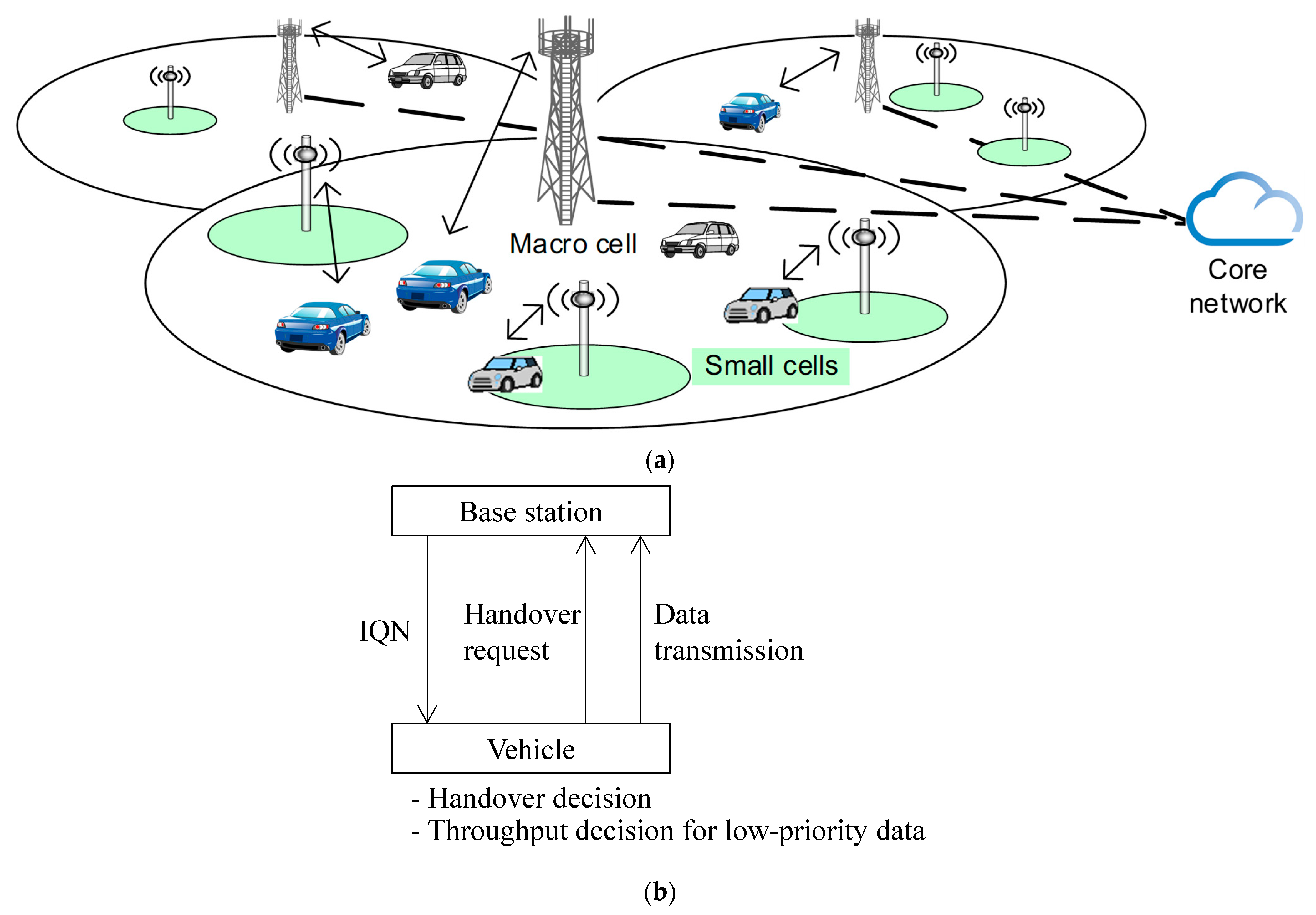
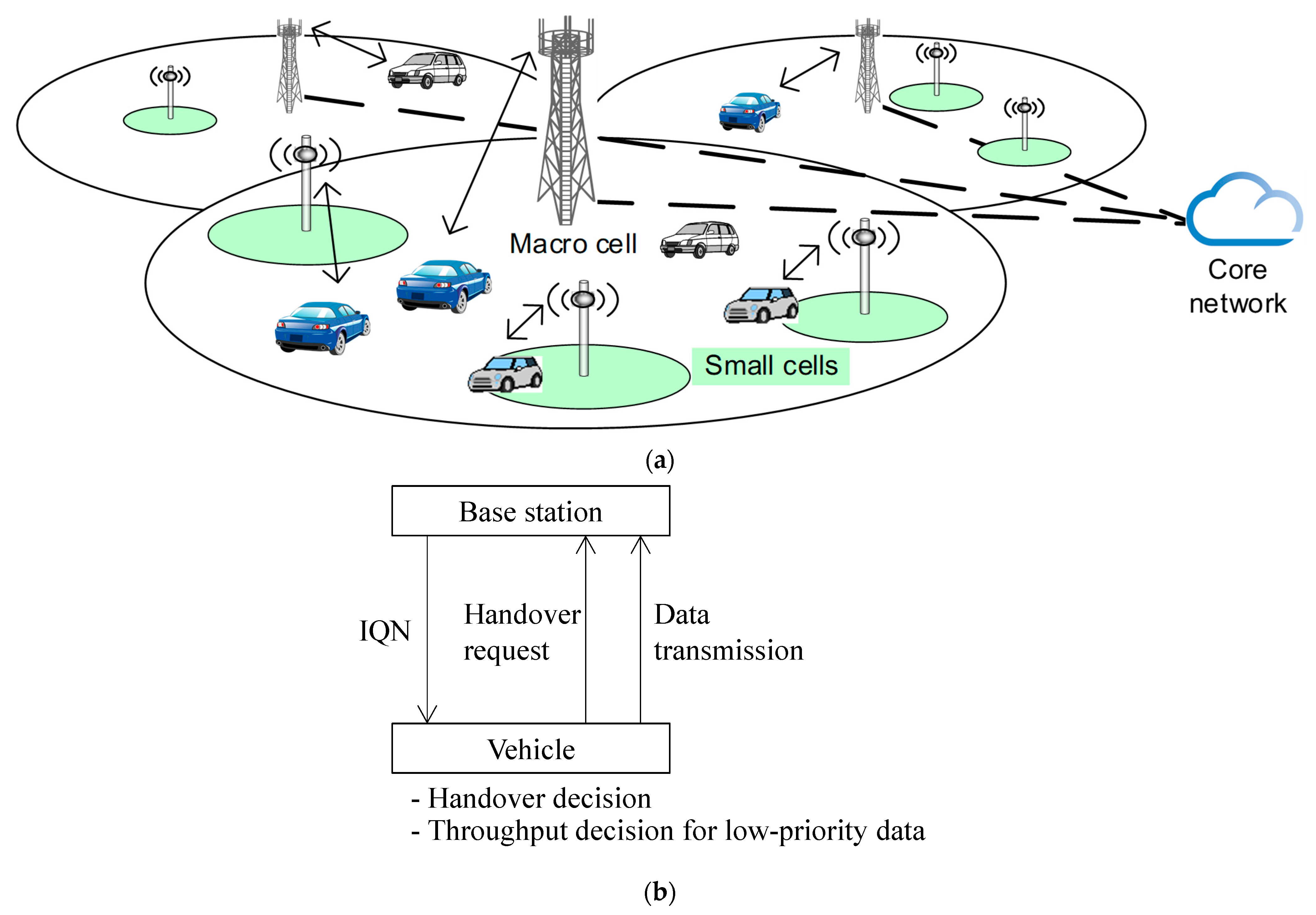
3. Proposed Communication System Based on In-Advanced QoS Notification
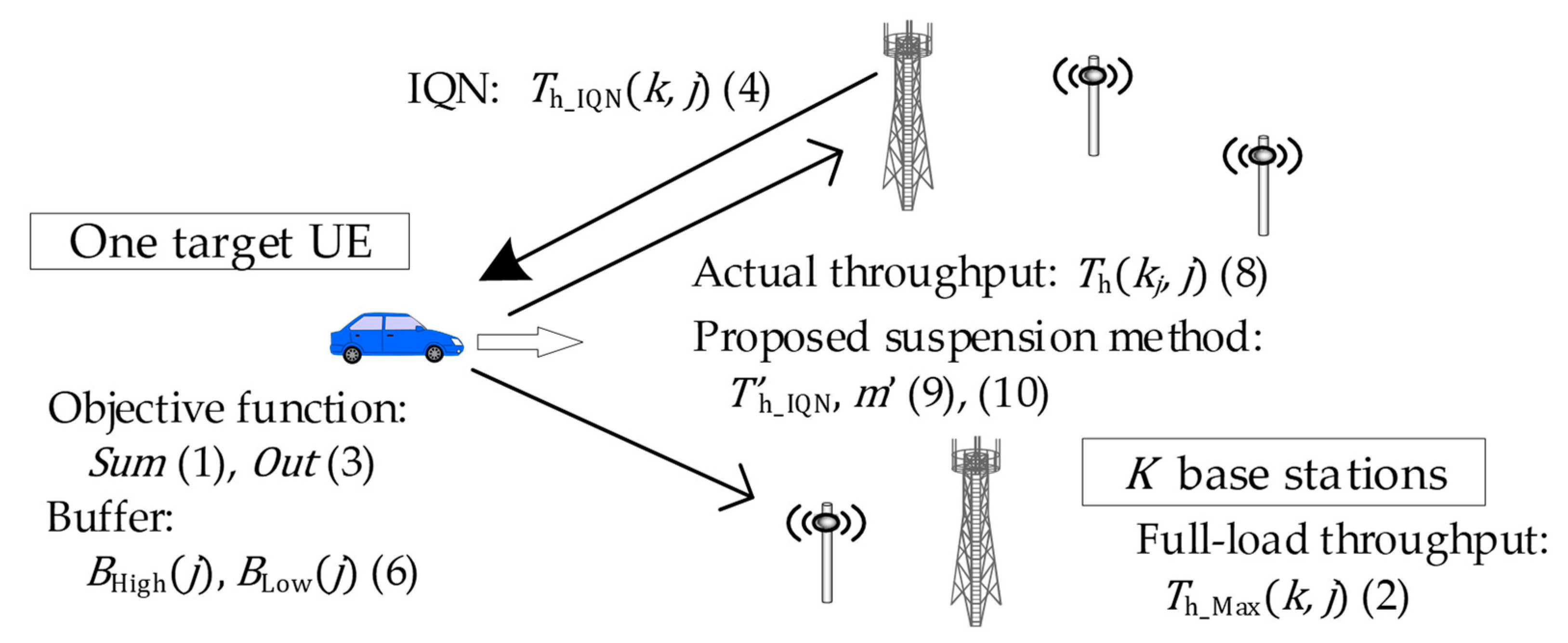
3.1. Outline of Proposed Algorithm
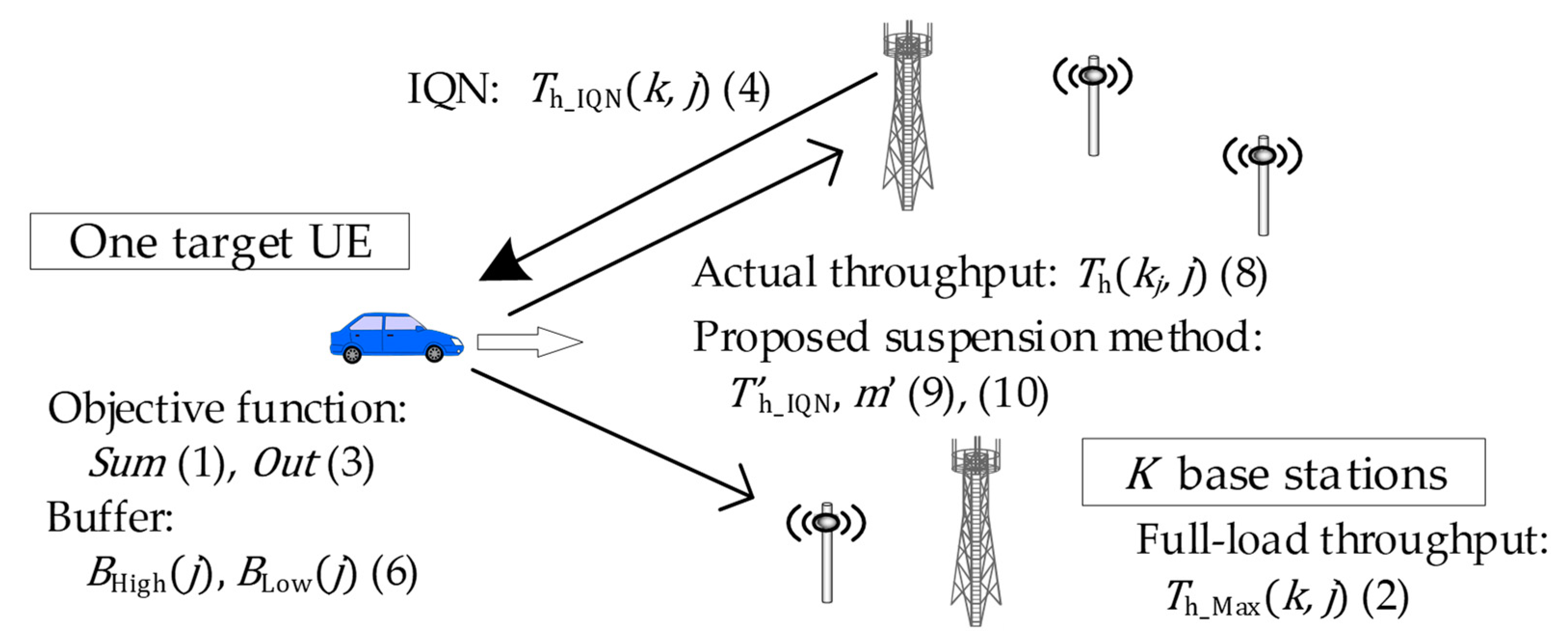
3.2. Performance Indicator
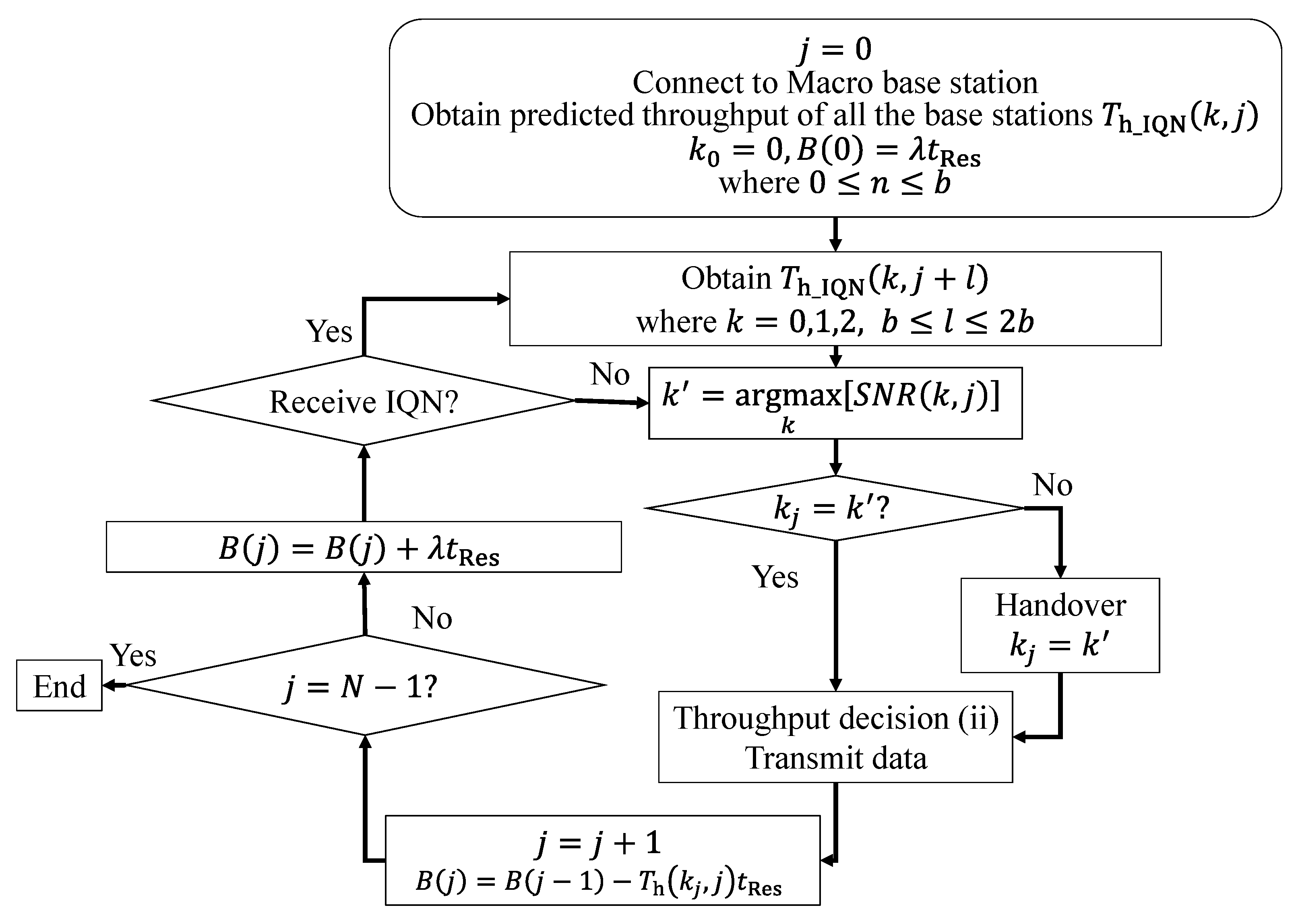
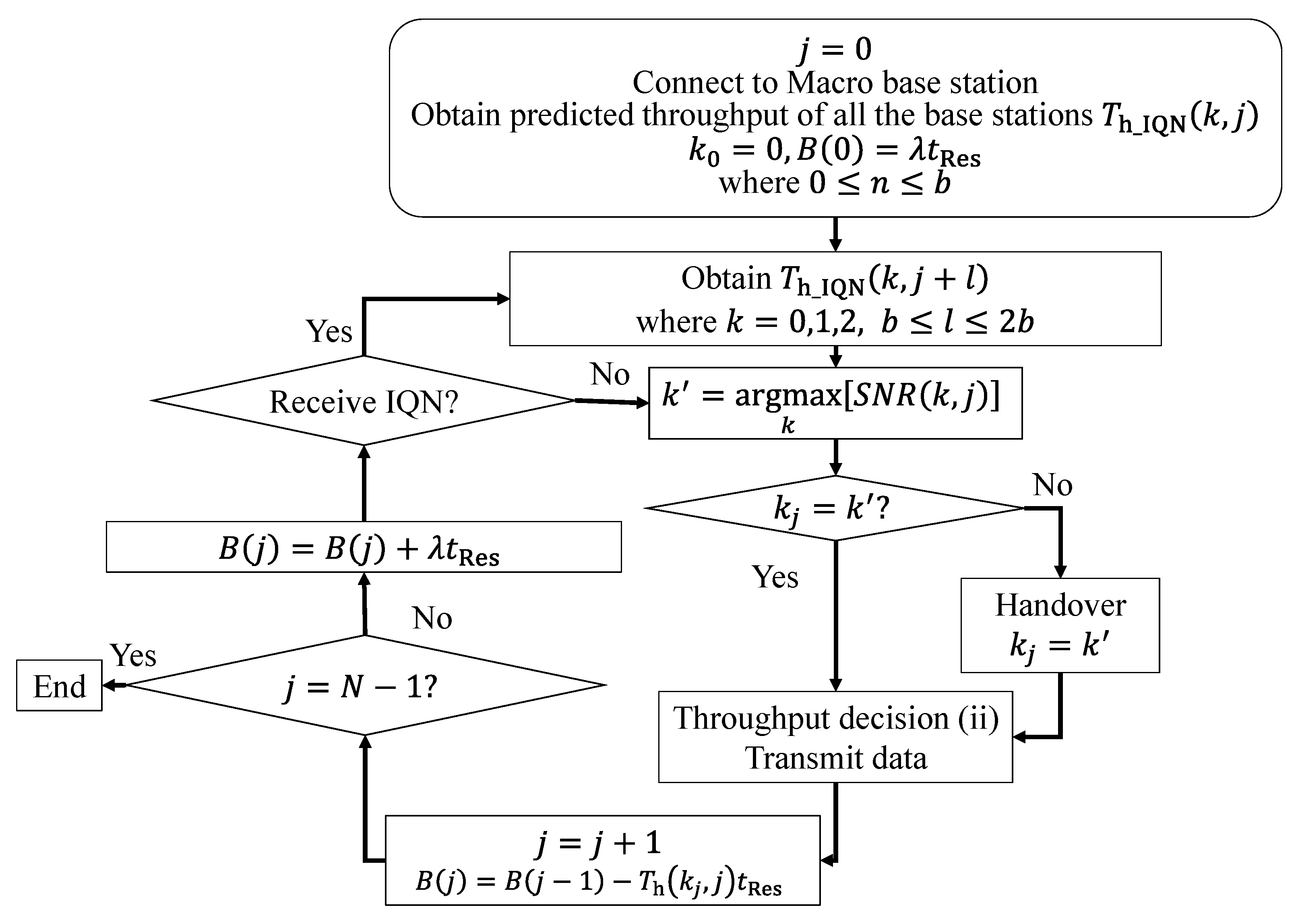
3.3. Transmission Flowchart Based on In-Advanced QoS Notification
3.4. High and Low Priority Data
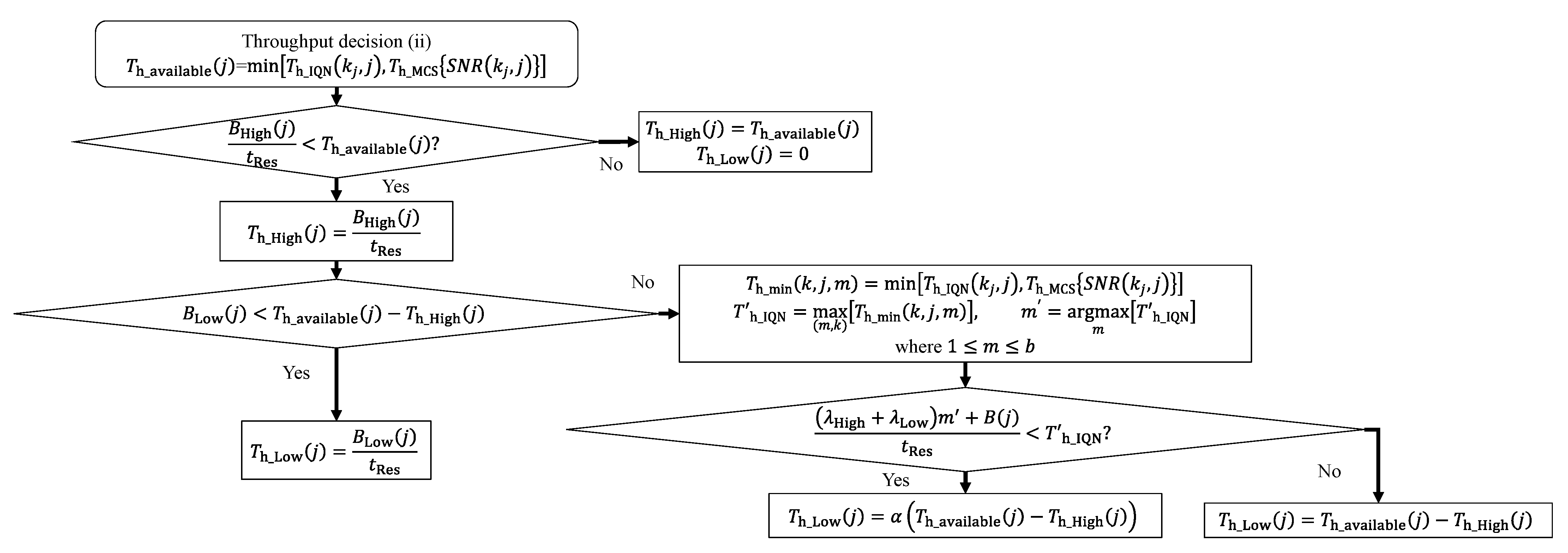
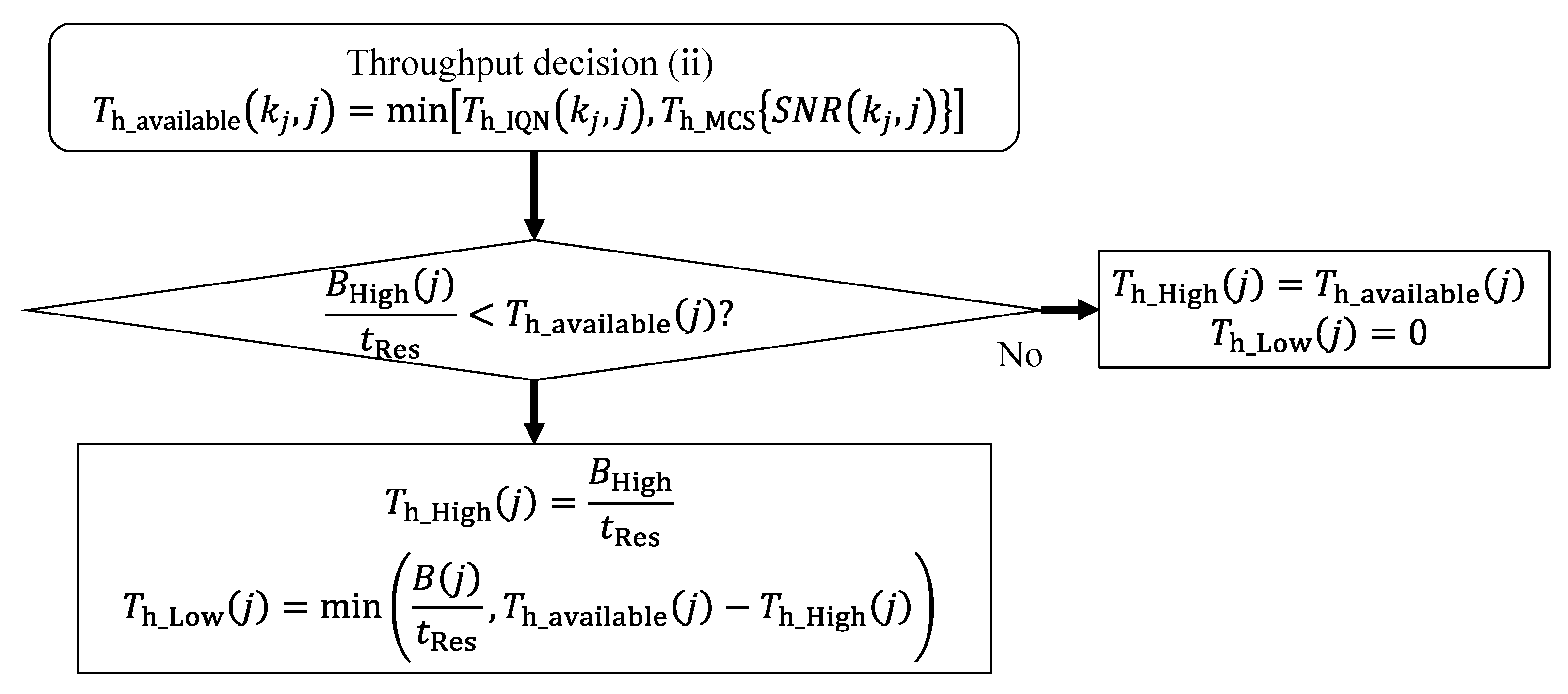
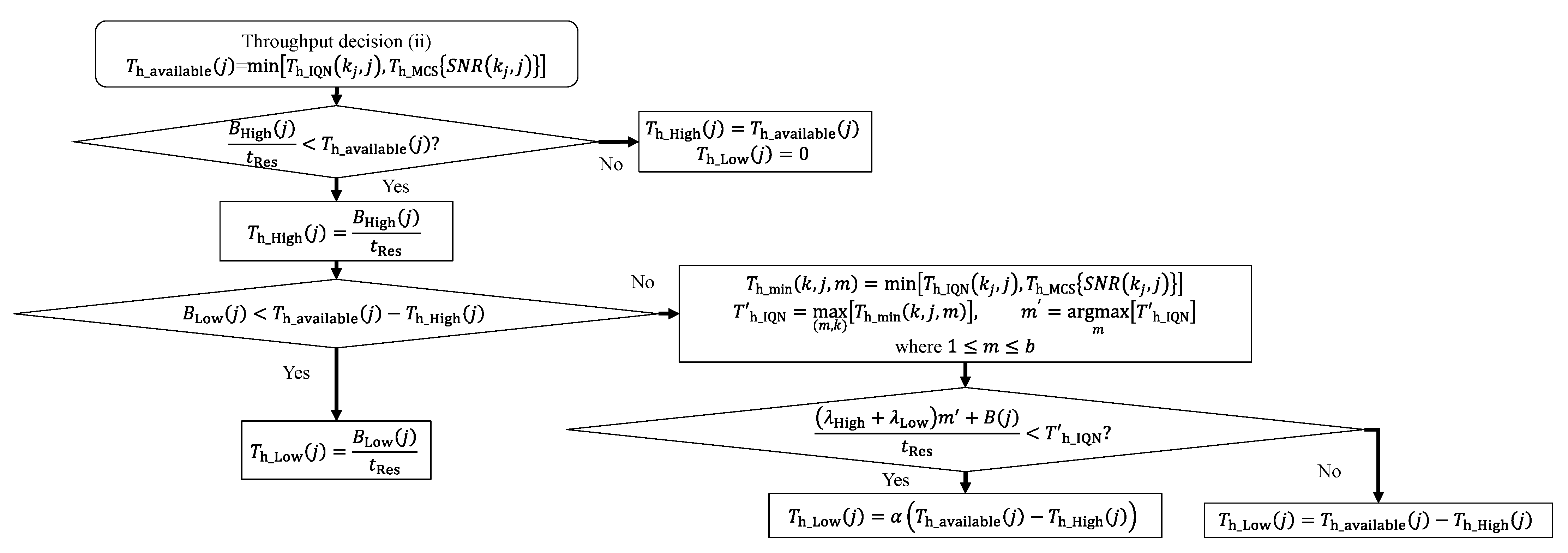
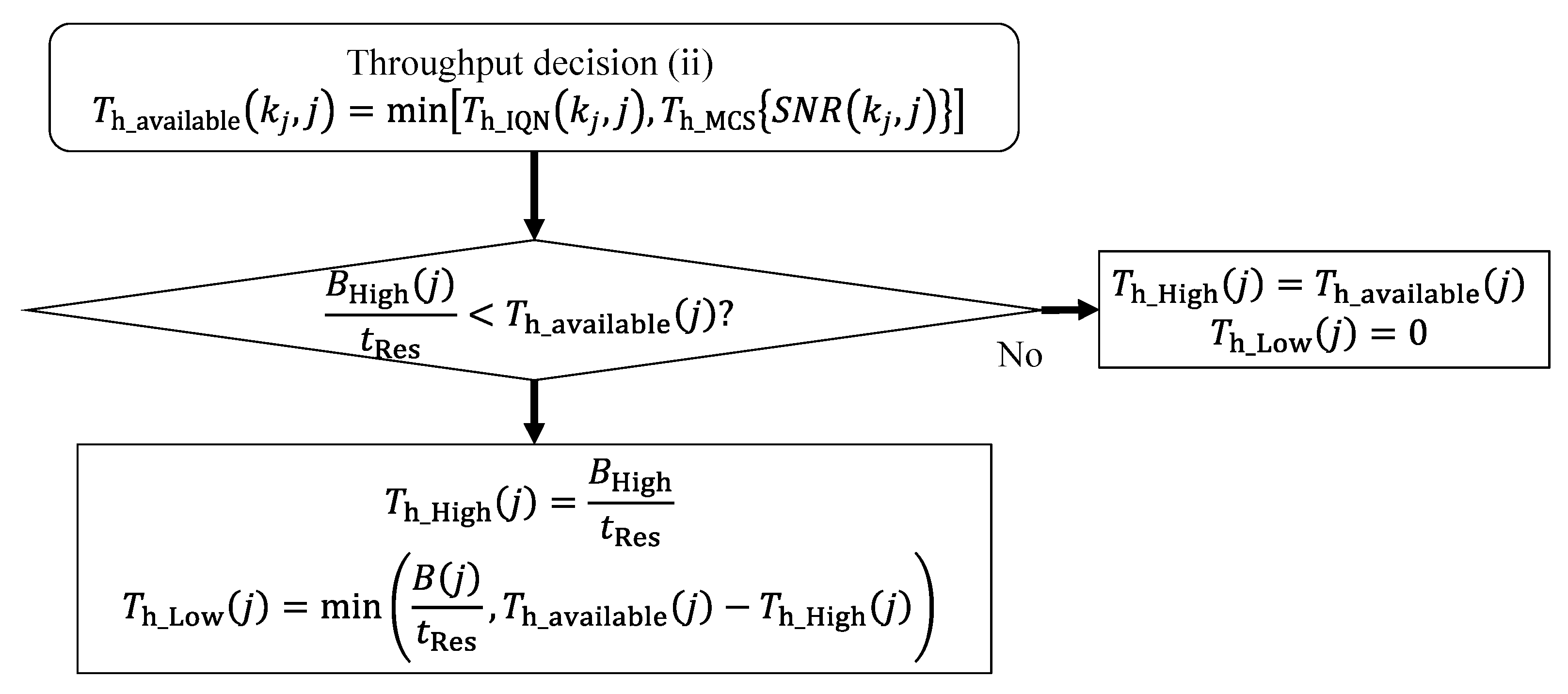
3.5. Proposed Adaptive Transmission Suspension Flowchart
4. Numerical Results
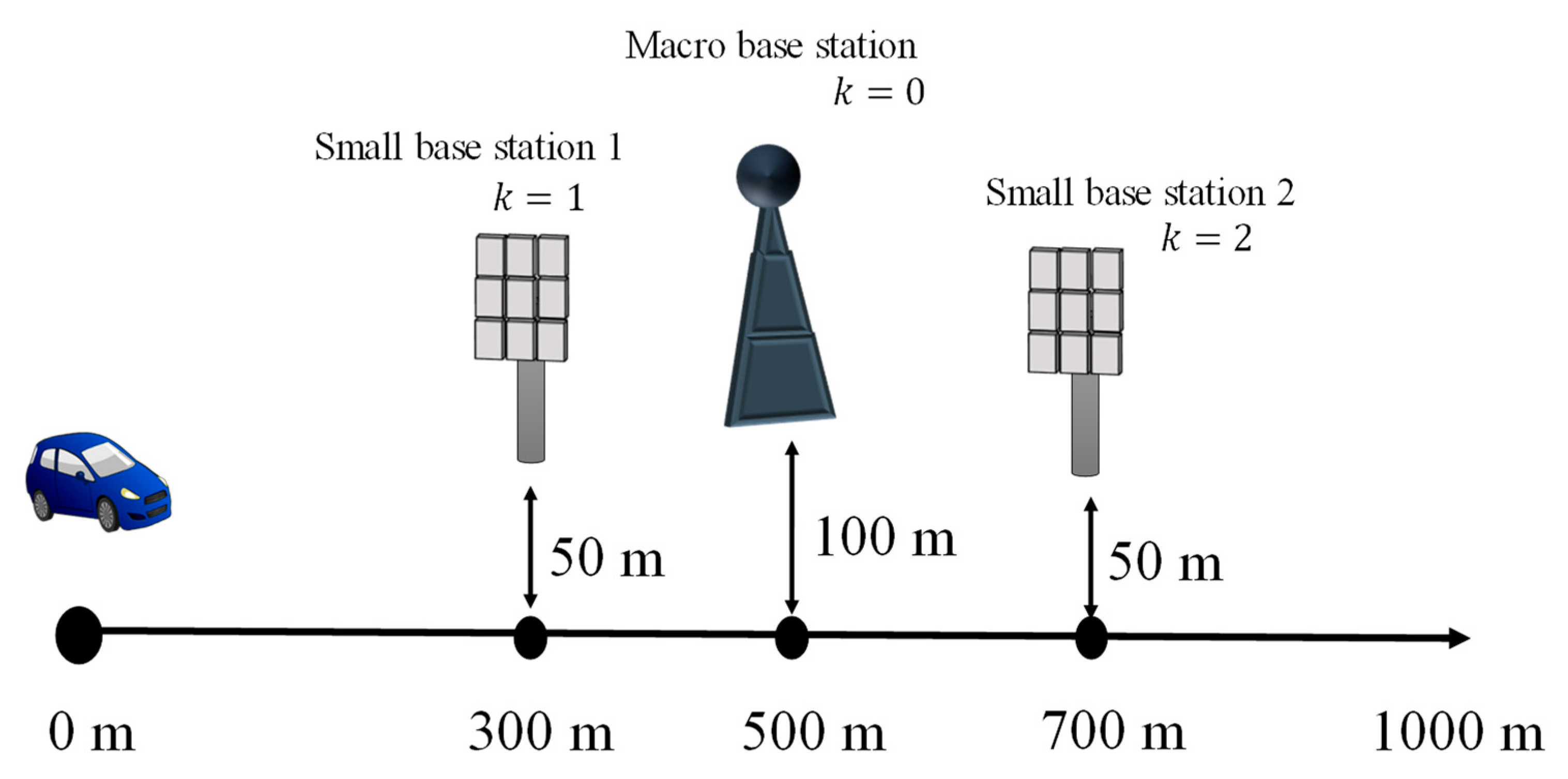
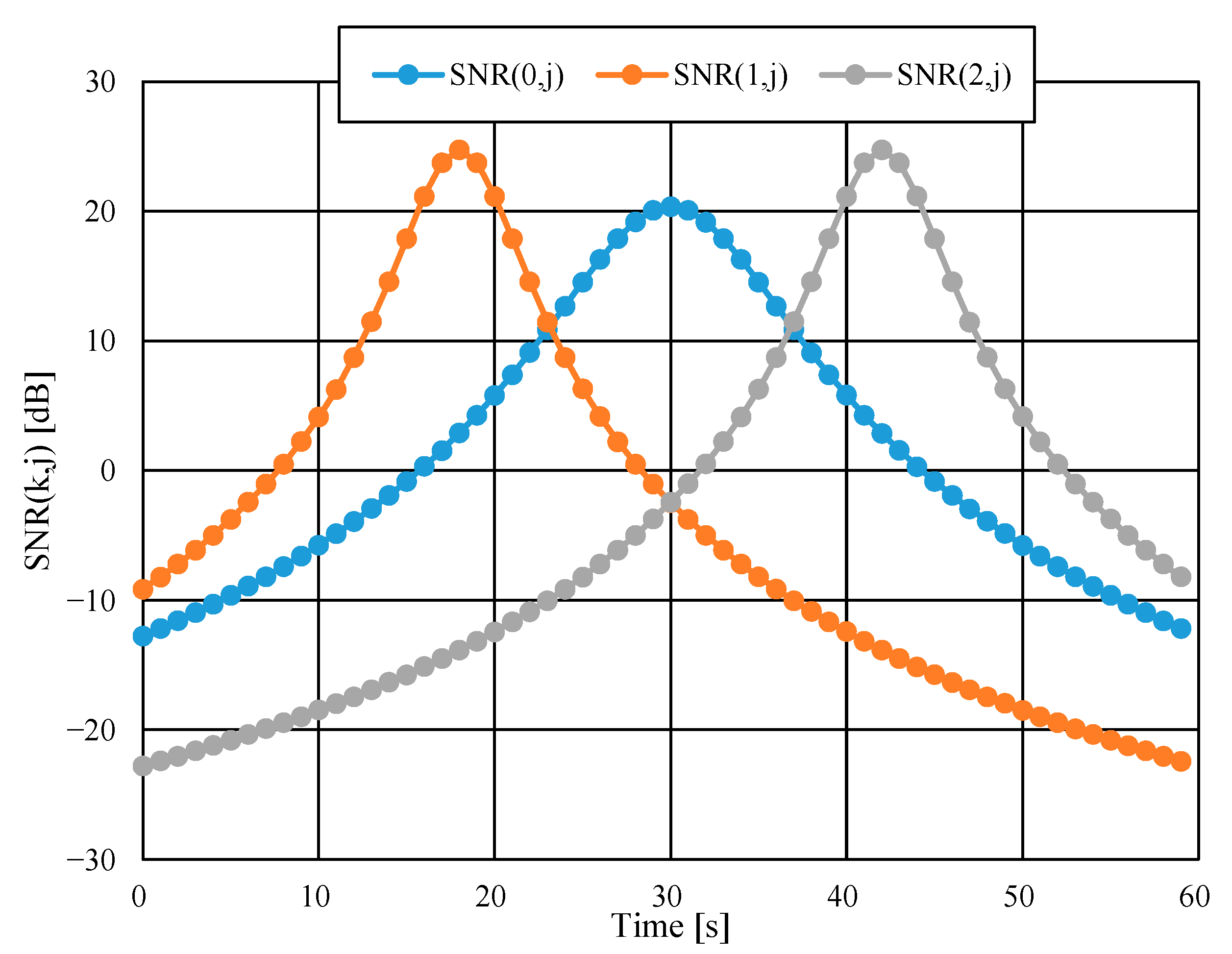
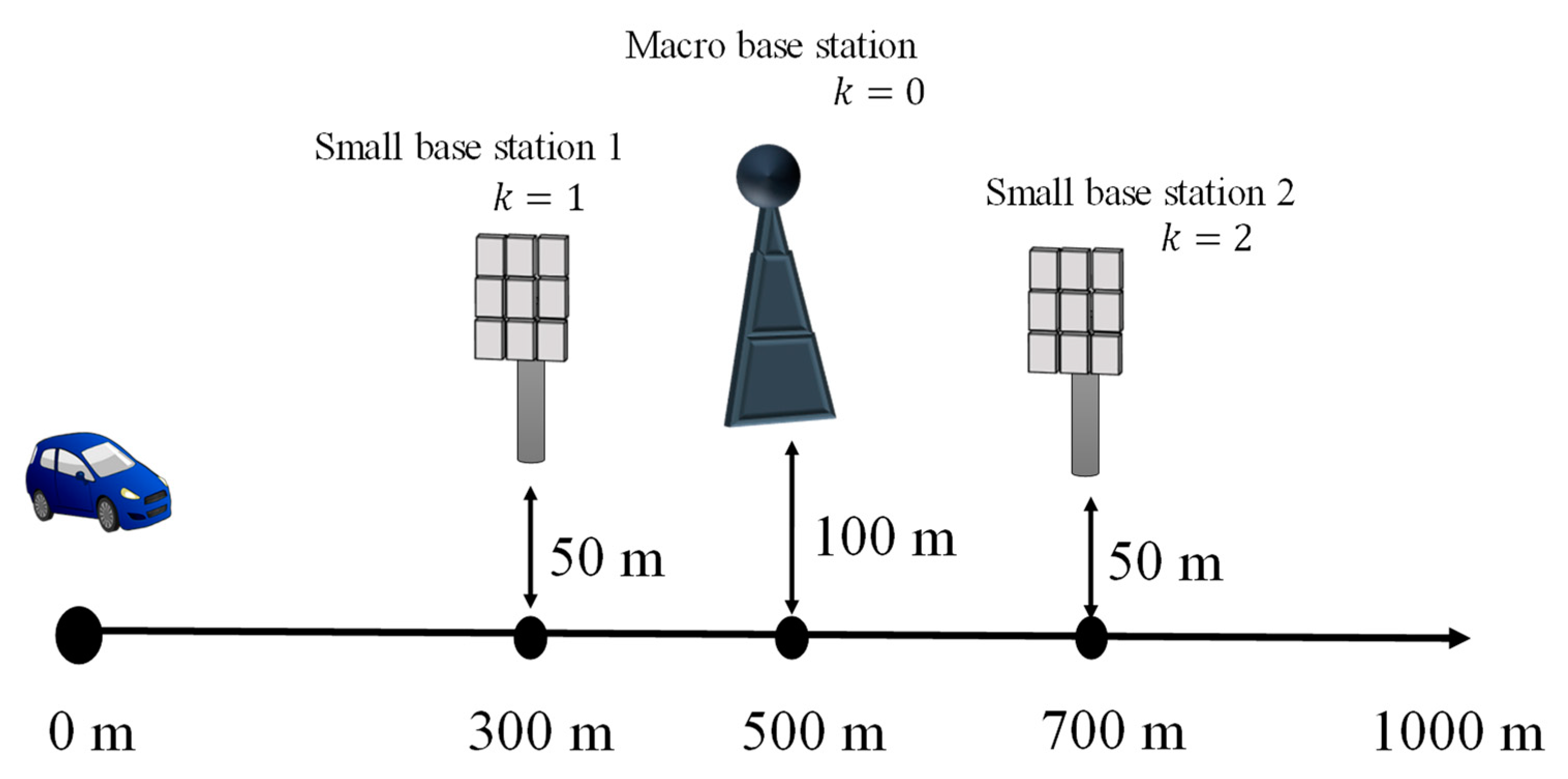
4.1. Simulation Scenario
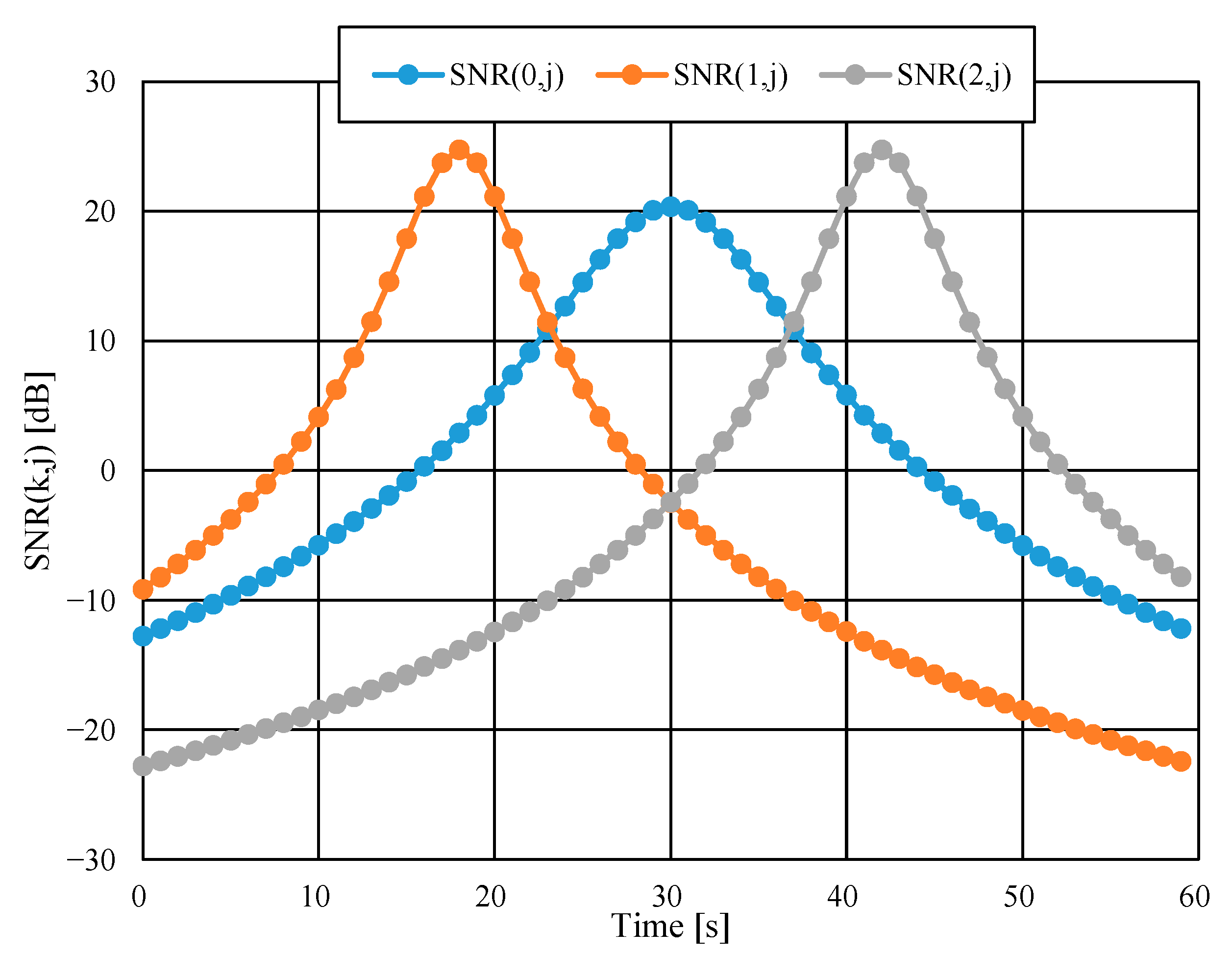
4.2. Throughput Calculation
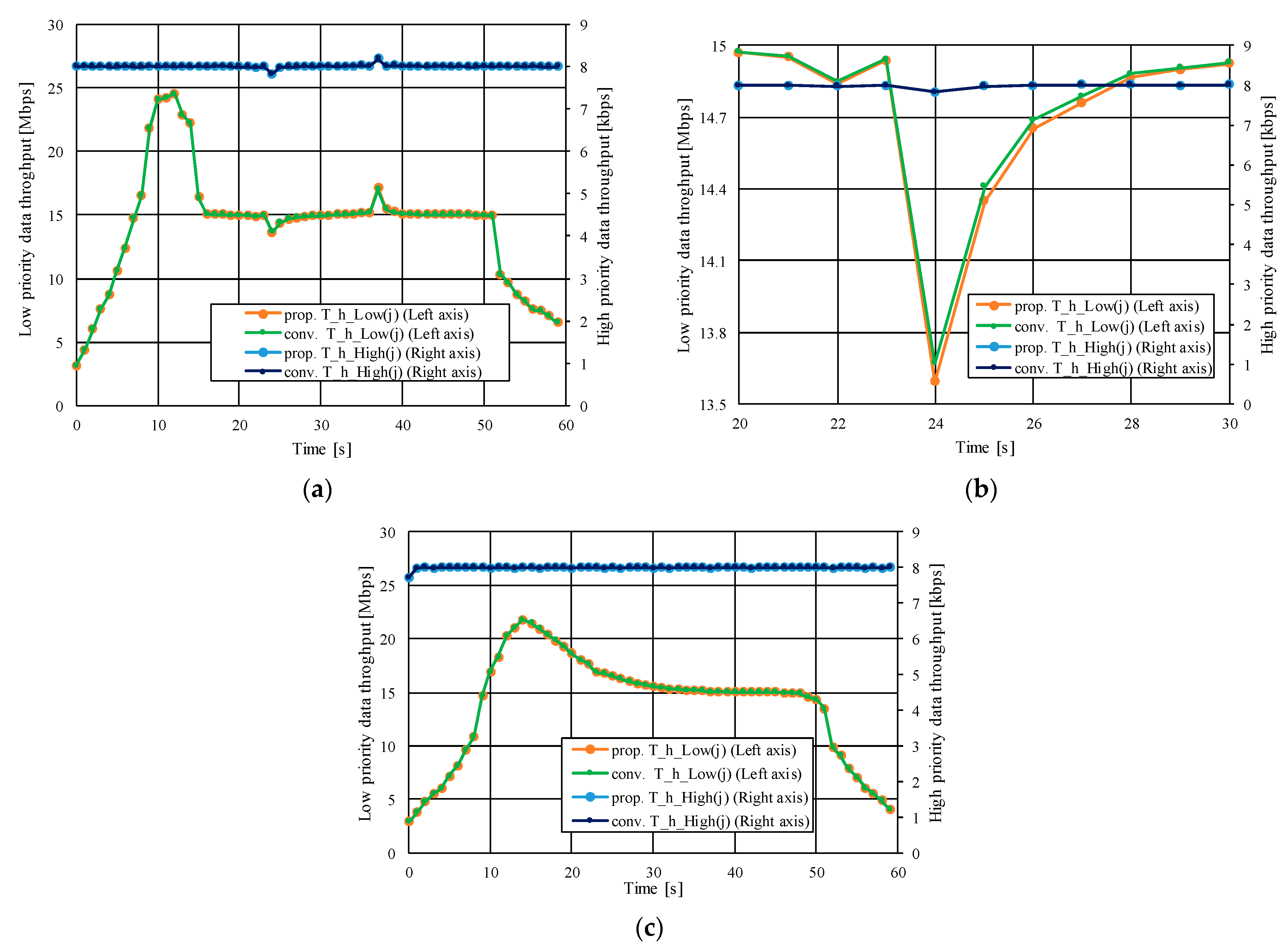
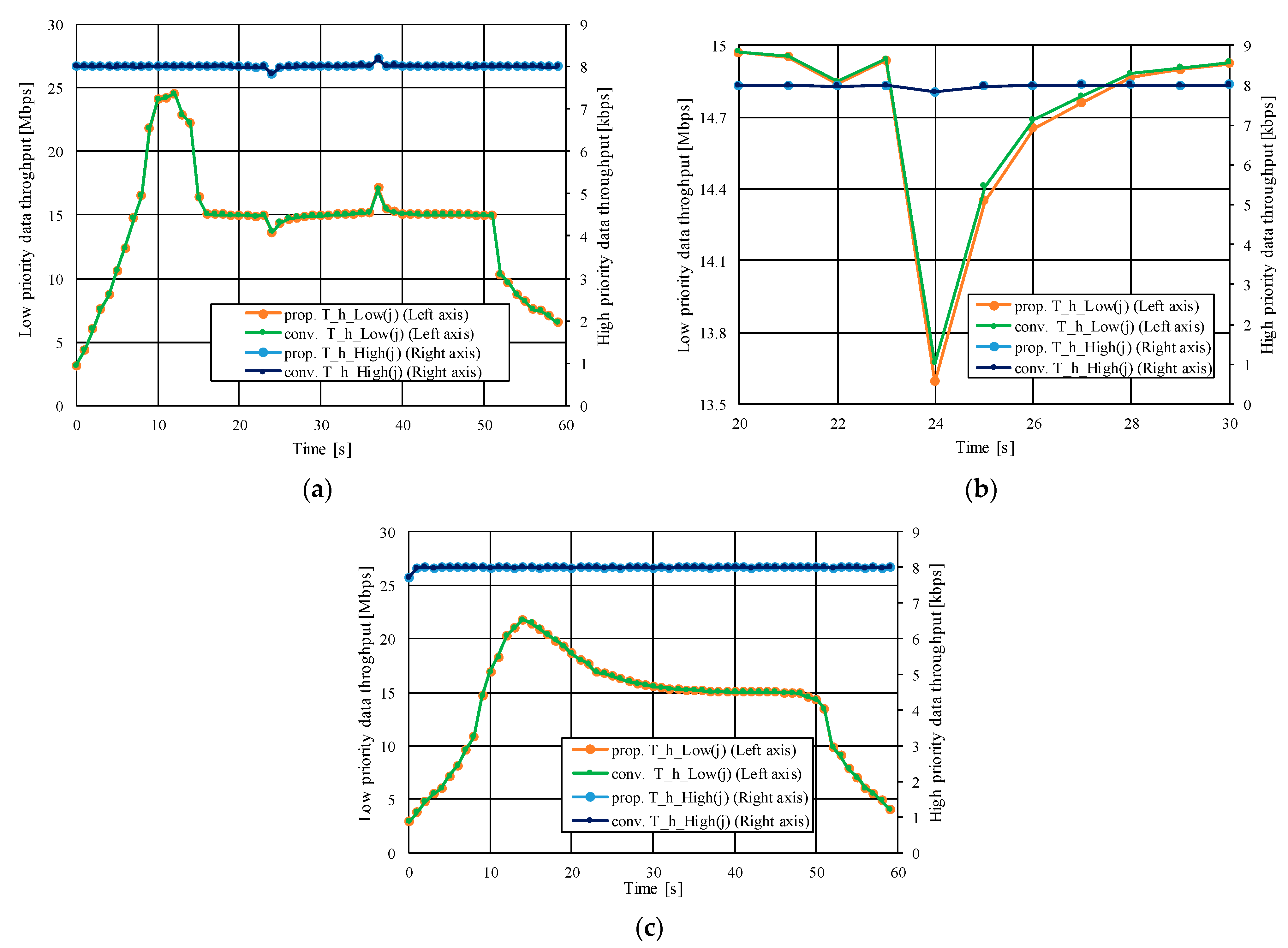
4.3. Throughput Characteristics on Different Congestion Conditions
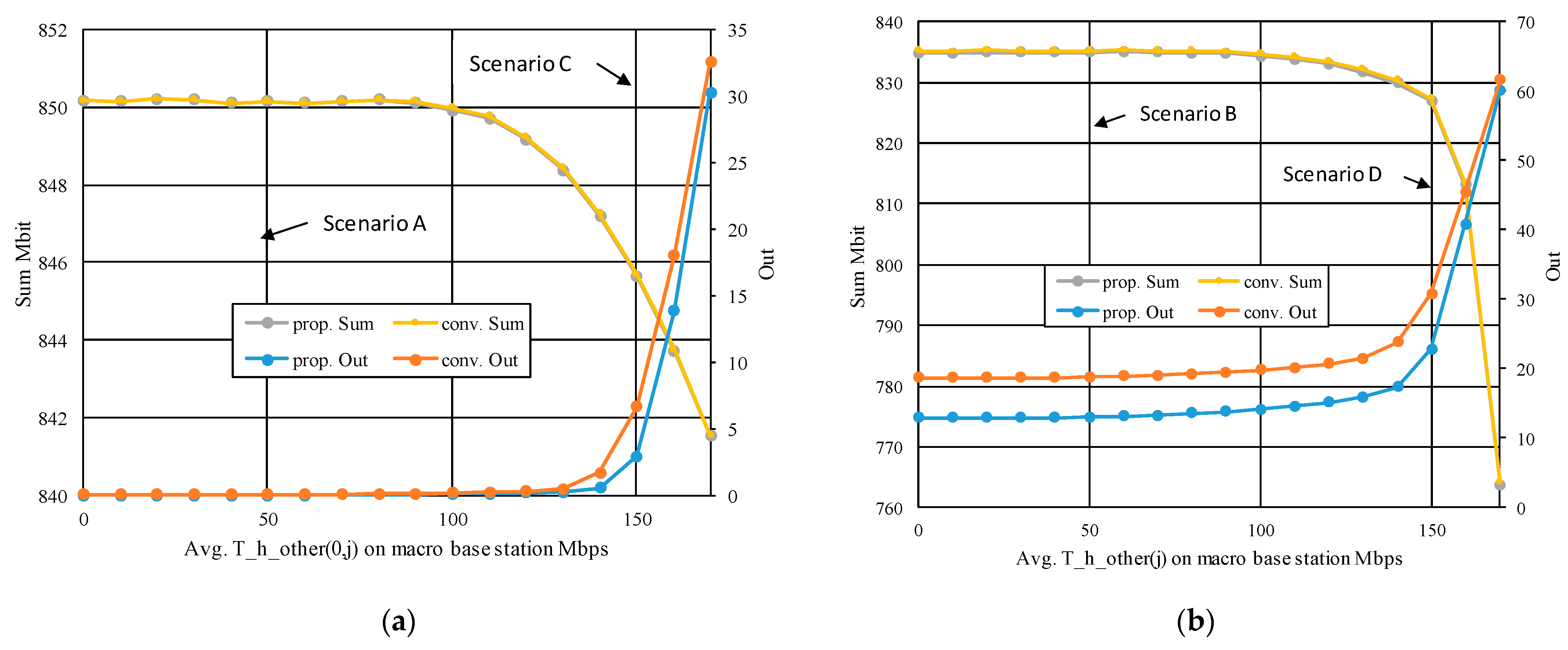
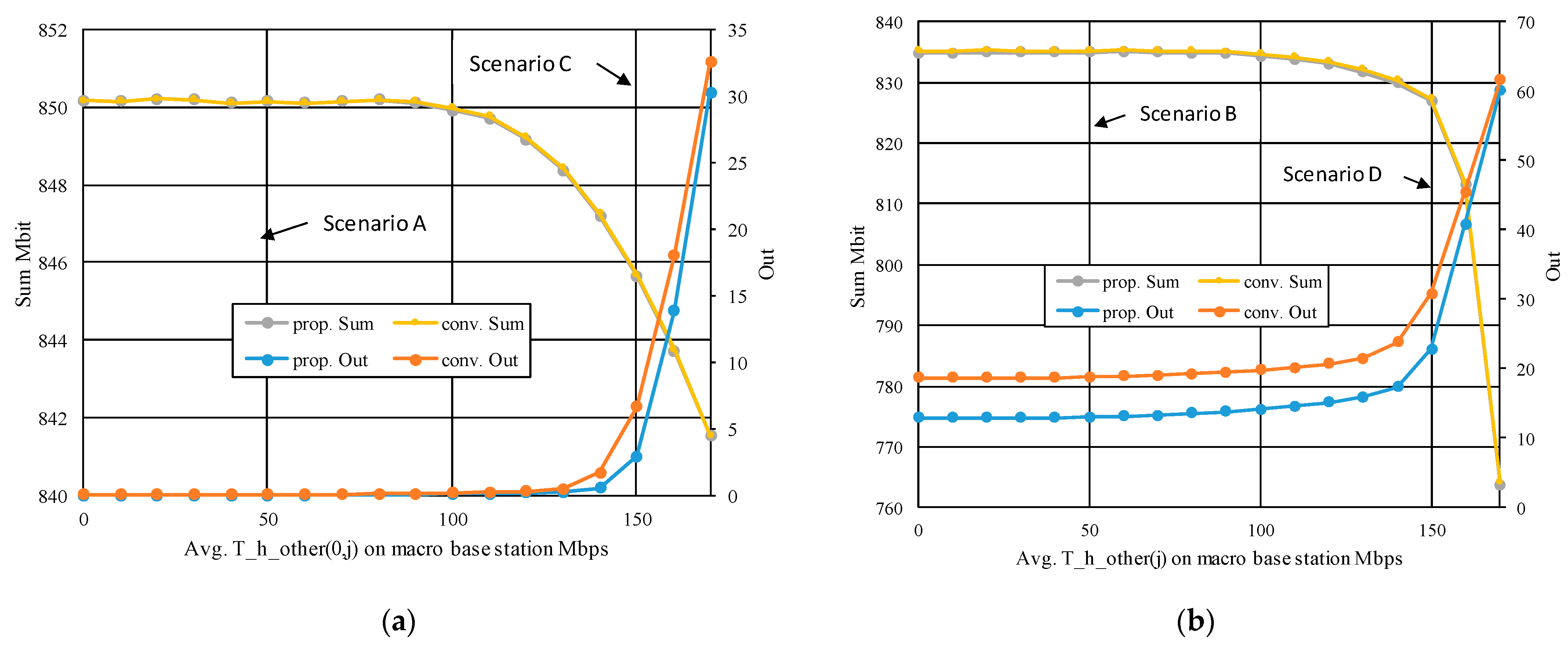
4.4. Sum and Out Characteristics
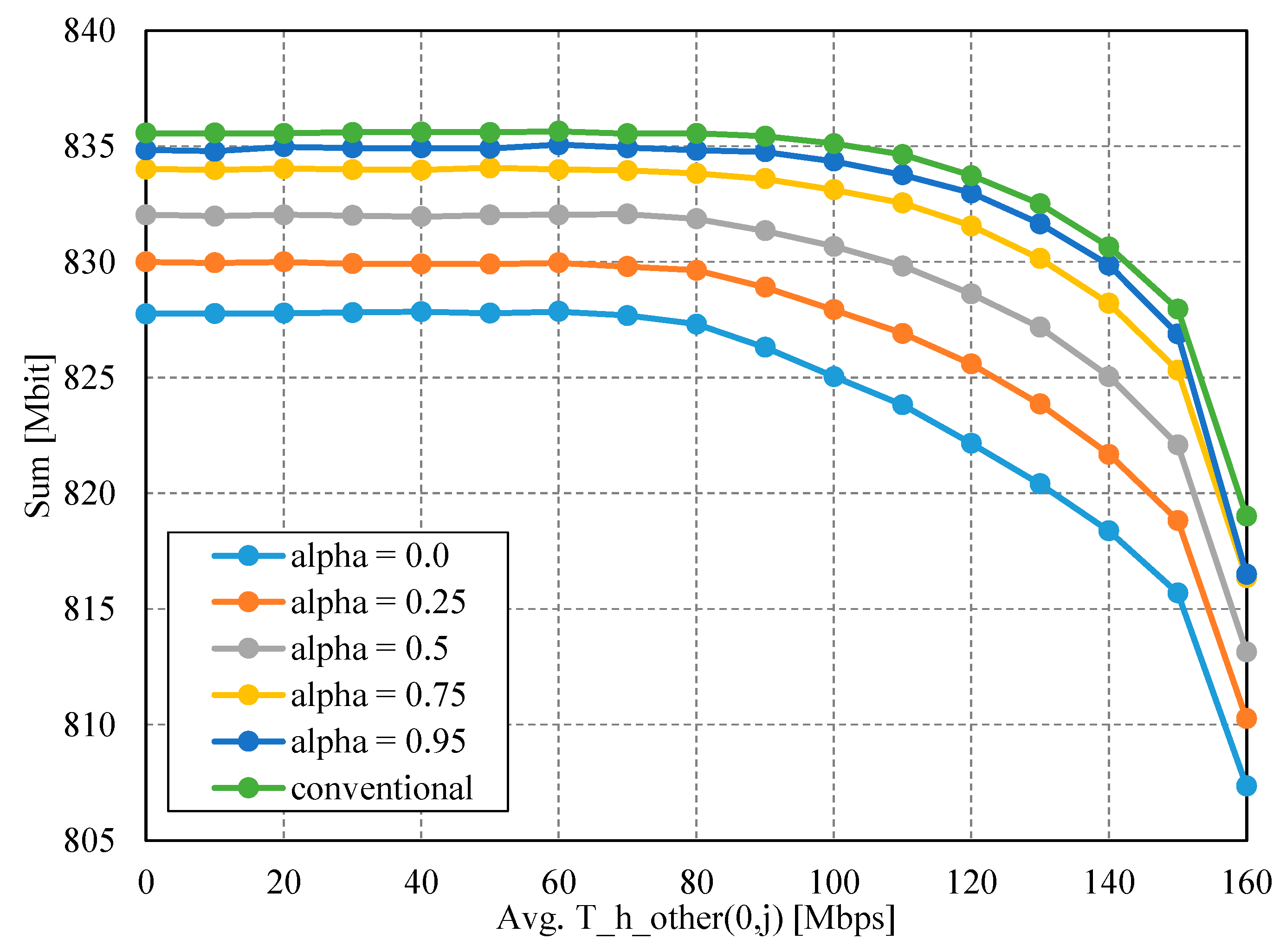
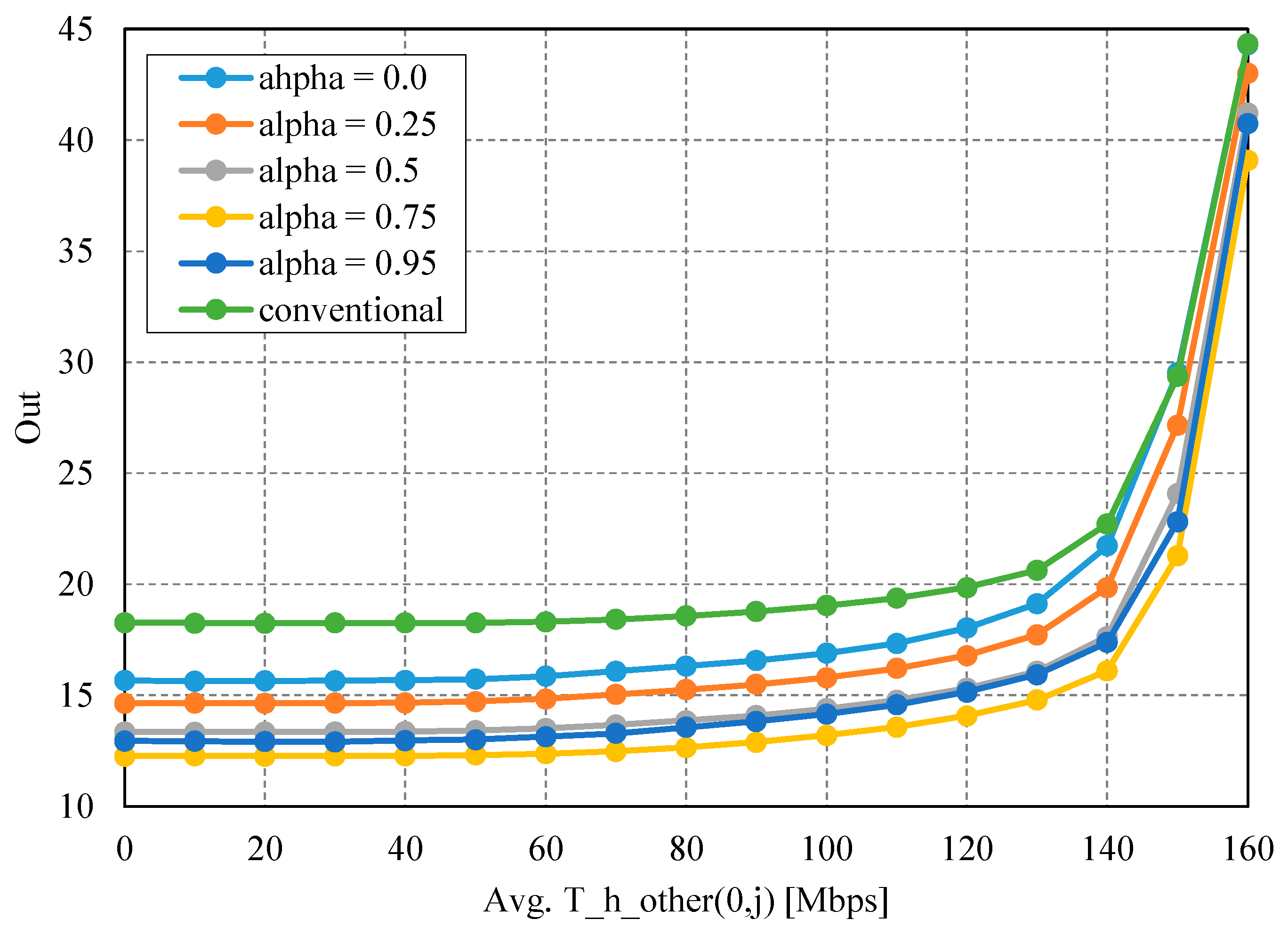
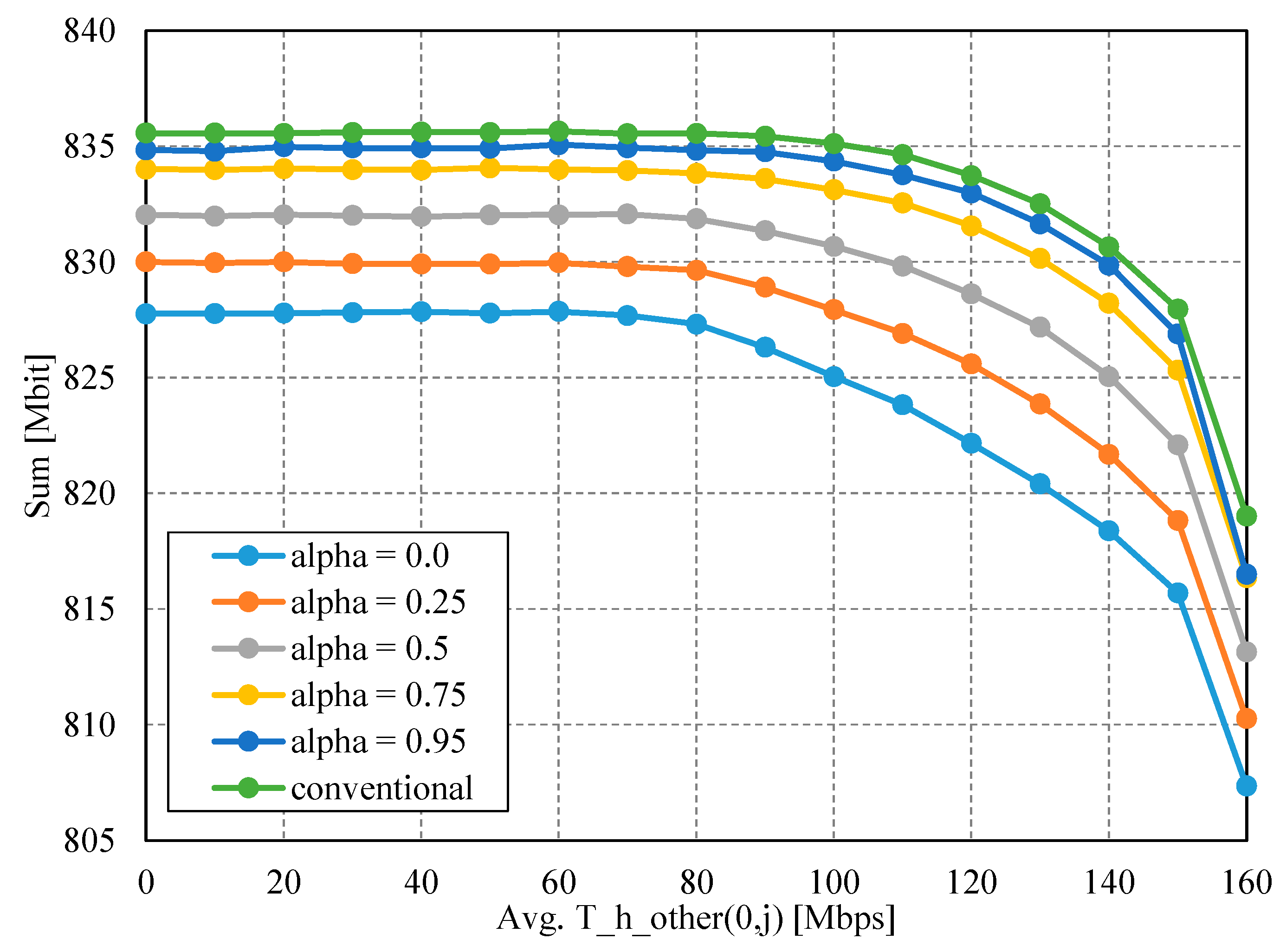
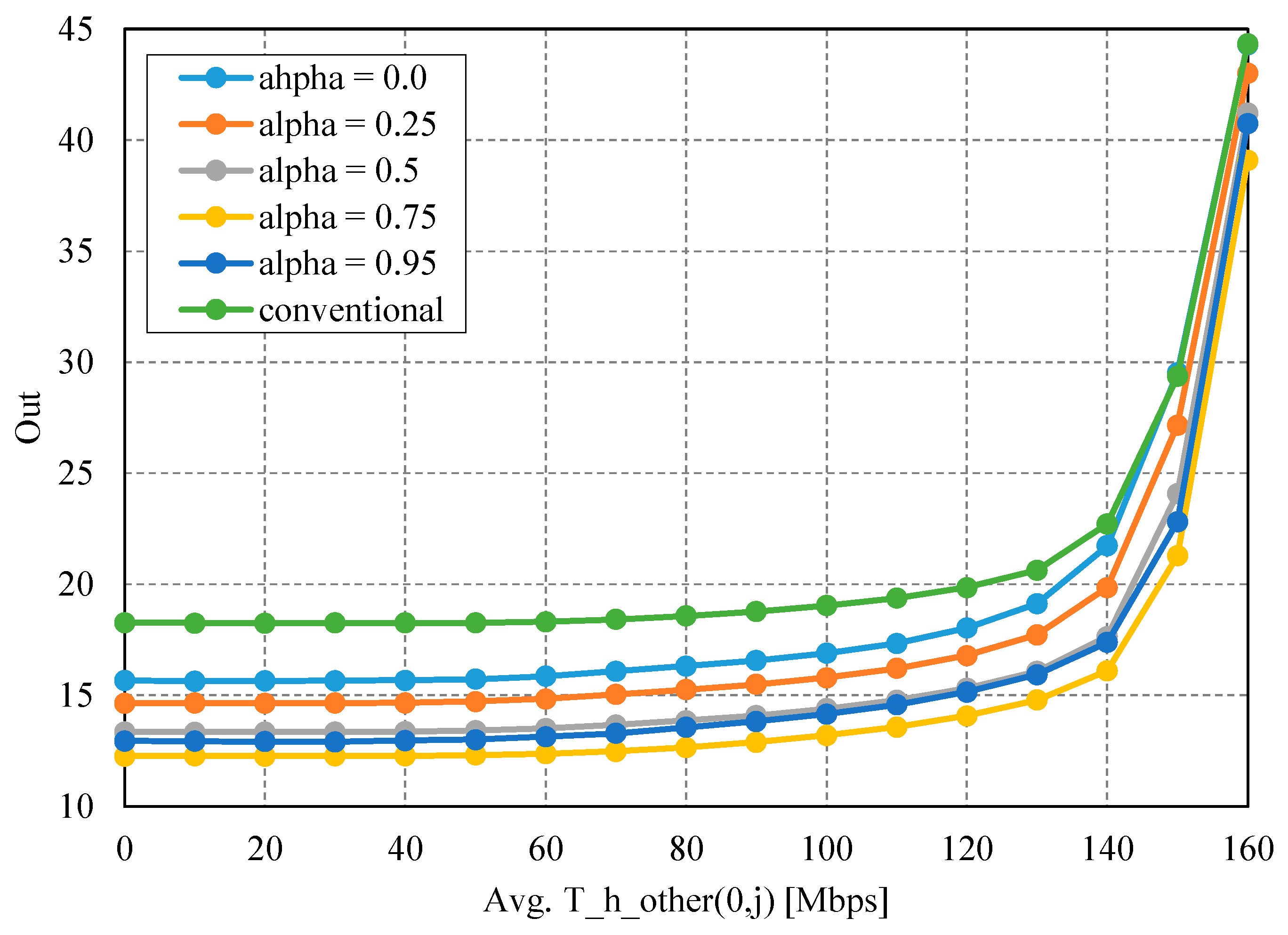
4.5. Suspending Coefficient
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, S.; Hu, J.; Shi, Y.; Peng, Y.; Fang, J.; Zhao, R.; Zhao, L. Vehicle to everything (V2X) services supported by LTE-based systems and 5G. IEEE Commun. Stand. Mag. 2017, 1, 70–76. [Google Scholar] [CrossRef]
- Chen, S.; Hu, J.; Shi, Y.; Zhao, L. LTE-V: A TD-LTE-Based V2X Solution for Future Vehicular Network. IEEE Internet Things J. 2016, 3, 997–1005. [Google Scholar] [CrossRef]
- Moto, K.; Mikami, M.; Serizawa, K.; Yoshino, H. Field Experimental Evaluation on 5G V2N Low Latency Communication for Application to Truck Platooning. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Saeed, U.; Hämäläinen, J.; Mutafungwa, E.; Wichman, R.; González, D.; Garcia-Lozano, M. Route-based Radio Coverage Analysis of Cellular Network Deployments for V2N Communication. In Proceedings of the 2019 International Conference on Wireless and Mobile Computing, Networking and Communications (WiMob), Barcelona, Spain, 21–23 October 2019; pp. 1–6. [Google Scholar]
- Kim, Y.; Lee, H.Y.; Hwang, P.; Patro, R.K.; Lee, J.; Roh, W.; Cheun, K. Feasibility of Mobile Cellular Communications at Millimeter Wave Frequency. IEEE J. Sel. Top. Signal Process. 2016, 10, 589–599. [Google Scholar] [CrossRef]
- Cheon, Y.; Kim, Y. Millimeter-wave phased array antenna with wide beam coverage. In Proceedings of the 2016 10th European Conference on Antennas and Propagation (EuCAP), Davos, Switzerland, 10–15 April 2016; pp. 1–3. [Google Scholar]
- EOkamoto; Okada, H.; Ishii, Y.; Makido, S. Performance improvement of low-latency V2I uplink using superposed cooperative V2V transmission. In Proceedings of the 2017 IEEE 86th Vehicular Technology Conference (VTC-Fall), Toronto, ON, Canada, 24–27 September 2017. [Google Scholar]
- Ishikawa, H.; Okamoto, E.; Okada, H.; Makido, S. Performance improvement of V2I uplink transmission on far vehicles using frequency scheduling-based cooperative V2V relay transmission. In Proceedings of the 2020 IEEE 17th Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 10–13 January 2020. [Google Scholar]
- Gozalvez, J.; Sepulcre, M.; Bauza, R. IEEE 802.11p Vehicle to Infrastructure Communications in Urban Environments. IEEE Commun. Mag. 2012, 50, 176–183. [Google Scholar] [CrossRef]
- 3GPP. Release 16. Available online: https://www.3gpp.org/specifications-technologies/releases/release-16 (accessed on 2 February 2023).
- SAE International. Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 2 February 2023).
- 5GAA Working Group 2. LS Reply to 3GPP on Time-Criticality of In-Advance QoS Notification. SP-180934. October 2018. Available online: https://www.3gpp.org/ftp/tsg_sa/TSG_SA/TSGS_82/Docs/SP-180934.zip (accessed on 1 November 2022).
- 5GAA. Making 5G Proactive and Predictive for the Automotive Industry. White Paper. 2019, pp. 1–26. Available online: https://5gaa.org/5gaa-releases-white-paper-on-making-5g-proactive-and-predictive-for-the-automotive-industry/ (accessed on 1 November 2022).
- 3GPP TR 21.914 V14.0.0. Summary of Rel-14 Work Items. May 2018. Available online: https://www.scirp.org/(S(351jmbntvnsjt1aadkozje))/reference/referencespapers.aspx?referenceid=3130168 (accessed on 1 November 2022).
- Higuchi, K.; Benjebbour, A. Non-orthogonal Multiple Access (NOMA) with Successive Interference Cancellation for Future Radio Access. IEICE Trans. Commun. 2015, 98, 403–414. [Google Scholar] [CrossRef]
- 3GPP TS22.186 V16.2.0. Enhancement of 3GPP support for V2X scenarios; Stage 1. June 2019. Available online: https://www.etsi.org/deliver/etsi_ts/122100_122199/122186/15.03.00_60/ts_122186v150300p.pdf (accessed on 1 November 2022).
- 3GPP. Release 15. Available online: https://www.3gpp.org/specifications-technologies/releases/release-15 (accessed on 2 February 2023).
- Jiang, C.; Zhang, H.; Ren, Y.; Han, Z.; Chen, K.-C.; Hanzo, L. Machine Learning Paradigms for Next-Generation Wireless Networks. IEEE Wirel. Commun. 2016, 24, 98–105. [Google Scholar] [CrossRef]
- Morocho-Cayamcela, M.E.; Lee, H.; Lim, W. Machine Learning for 5G/B5G Mobile and Wireless Communications: Potential, Limitations, and Future Directions. IEEE Access 2019, 7, 137184–137206. [Google Scholar] [CrossRef]
- ETSI TS 102 687 V1.2.1. Intelligent Transport Systems (ITS); Decentralized Congestion Control Mechanisms for Intelligent Transport Systems Operating in the 5 GHz Range; Access Layer Part. 2018. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&cad=rja&uact=8&ved=2ahUKEwjkutuI5IL9AhWRF4gKHXYyCWwQFnoECBEQAQ&url=https%3A%2F%2Fwww.etsi.org%2Fdeliver%2Fetsi_ts%2F102600_102699%2F102687%2F01.02.01_60%2Fts_102687v010201p.pdf&usg=AOvVaw3Zgzja225d_txXc0CM-bgW (accessed on 1 November 2022).
- ETSI TS 103 574 V1.1.1. Intelligent Transport Systems (ITS); Congestion Control Mechanisms for the C-V2X PC5 Interface; Access Layer Part. Nov. 2018. Available online: https://www.google.com/url?sa=t&rct=j&q=&esrc=s&source=web&cd=&cad=rja&uact=8&ved=2ahUKEwjxmO_b44L9AhXbQN4KHbxiCWUQFnoECBwQAQ&url=https%3A%2F%2Fwww.etsi.org%2Fdeliver%2Fetsi_ts%2F103500_103599%2F103574%2F01.01.01_60%2Fts_103574v010101p.pdf&usg=AOvVaw0MXq8V0smpV3VF21XG9QTM (accessed on 1 November 2022).
- Bazzi, A. Congestion Control Mechanisms in IEEE 802.11p and Sidelink C-V2X. In Proceedings of the 2019 53rd Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 3–6 November 2019. [Google Scholar]
- Mansouri, A.; Martinez, V.; Harri, J. A first investigation of congestion control for LTE-V2X mode 4. In Proceedings of the IEEE Wireless On-demand Network systems and Services Conference (WONS), Wengen, Switzerland, 22–24 January 2019; pp. 56–63. [Google Scholar]
- Kang, A.; Jung, S.; Bahk, S. Sensing-Based Power Adaptation for Cellular V2X Mode 4. In Proceedings of the IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), Seoul, Republic of Korea, 22–25 October 2018; pp. 1–4. [Google Scholar]
- Haider, A.; Hwang, S.-H. Adaptive Transmit Power Control Algorithm for Sensing-Based Semi-Persistent Scheduling in C-V2X Mode 4 Communication. Electronics 2019, 8, 846. [Google Scholar] [CrossRef]
- Sepulcre, M.; Gozalvez, J.; Lucas-Estan, M.C. Power and Packet Rate Control for Vehicular Networks in Multi-Application Scenarios. IEEE Trans. Veh. Technol. 2019, 68, 9029–9037. [Google Scholar] [CrossRef] [Green Version]
- Di, B.; Song, L.; Li, Y.; Han, Z. V2X Meets NOMA: Non-Orthogonal Multiple Access for 5G-Enabled Vehicular Networks. IEEE Wirel. Commun. 2017, 24, 14–21. [Google Scholar] [CrossRef]
- Kafi, M.A.; Djenouri, D.; Ben-Othman, J.; Badache, N. Congestion Control Protocols in Wireless Sensor Networks: A Survey. IEEE Commun. Surv. Tutor. 2014, 16, 1369–1390. [Google Scholar] [CrossRef]
- Wang, C.; Li, B.; Sohraby, K.; Daneshmand, M.; Hu, Y. Upstream congestion control in wireless sensor networks through cross-layer optimization. IEEE J. Sel. Areas Commun. 2007, 25, 786–795. [Google Scholar] [CrossRef]
- Ziouva, A.; Antonakopoulos, T. CSMA/CA performance under high traffic conditions: Throughput and delay analysis. Comput. Commun. 2022, 25, 313–321. [Google Scholar] [CrossRef]
- Pratt, W.A., Jr.; Nixon, M.J.; Rotvold, E.D.; Pramanik, R.S.; Lennvall, T.P. Suspending transmissions in a wireless network. U.S. Patent 8,169,974 B2, 1 May 2012. [Google Scholar]
- Bacci, G.; Lasaulce, S.; Saad, W.; Sanguinetti, L. Game Theory for Networks: A tutorial on game-theoretic tools for emerging signal processing applications. IEEE Signal Process. Mag. 2015, 33, 94–119. [Google Scholar] [CrossRef]
- Navarro-Ortiz, J.; Romero-Diaz, P.; Sendra, S.; Ameigeiras, P.; Ramos-Munoz, J.J.; Lopez-Soler, J.M. A Survey on 5G Usage Scenarios and Traffic Models. IEEE Commun. Surv. Tutorials 2020, 22, 905–929. [Google Scholar] [CrossRef]
- Benjebbour, A.; Kitao, K.; Kakishima, Y.; Na, C. 3GPP defined 5G requirements and evaluation conditions. NTT Docomo Tech. J. 2018, 19, 13–23. [Google Scholar]
- Esswie, A.A.; Pedersen, K.I. Null Space Based Preemptive Scheduling for Joint URLLC and eMBB Traffic in 5G Networks. IEEE Globecom Workshops 2018, 1–6. [Google Scholar] [CrossRef]
- Li, W.; Ma, X.; Wu, J.; Trivedi, K.S.; Huang, X.-L.; Liu, Q. Analytical Model and Performance Evaluation of Long-Term Evolution for Vehicle Safety Services. IEEE Trans. Veh. Technol. 2016, 66, 1926–1939. [Google Scholar] [CrossRef]
- RHogg, V.; Tanis, E.A.; Zimmerman, D.L. Probability and Statistical Inference; Macmillan: New York, NY, USA, 1977. [Google Scholar]
- Sagkriotis, S.E.; Panagopoulos, A.D. Optimal FFR Policies: Maximization of Traffic Capacity and Minimization of Base Station’s Power Consumption. IEEE Wirel. Commun. Lett. 2015, 5, 40–43. [Google Scholar] [CrossRef]
- 3GPP TS 38.211. 5G; NR; Physical Channels and Modulation. Ver 15.10.0, December 2021. Available online: https://www.3gpp.org/dynareport/38211.htm (accessed on 1 November 2022).
- Sasaki, K.; Suzuki, N.; Makido, S.; Nakao, A. Vehicle control system coordinated between cloud and mobile edge computing. In Proceedings of the 2016 55th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Tsukuba, Japan, 20–23 September 2016; pp. 1122–1127. [Google Scholar]
- 3GPP TS 38.214. 5G; NR: Physical Layer Procedures for Data. Ver 15.16.0, March 2022. Available online: https://www.3gpp.org/dynareport/38214.htm (accessed on 1 November 2022).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Channel Model | Tapped Delay Line-C [39] |
|---|---|
| Subcarrier spacing kHz | 30 |
| Number of resource blocks | 133 |
| Waveform [39] | Cyclic prefix-OFDM |
| Channel estimation | Perfect |
| Error correction code | Low-density parity check code |
| Number of transmitter/receiver antennas | (1.1) |
| Moving speed | 60 |
| Maximum modulation order | 6 |
| Number of simulation iterations | 100,000 |
| Transmitter | |||
| Equivalent isotropically radiated power | dBm | 18.6 | |
| Propagation channel | |||
| Base station model | - | Macro | Small |
| Path loss model [39] | - | UMa | UMi |
| Carrier frequency | GHz | 2.0 | 3.7 |
| Receiver | |||
| Rx antenna height | m | 25 | 10 |
| Rx antenna gain | dBi | 5 | 5 |
| Noise figure | dB | 4 | 4 |
| N0 | dBm/Hz | −169 | −169 |
| Bandwidth | MHz | 50 | 50 |
| Time resolution | s | 1 |
| Simulation time | s | 60 |
| IQN available time lag | s | 5 |
| IQN receiving interval | s | 5 |
| Data generation ratio of high priority | Mbps | 15 |
| Data generation ratio of low priority | Mbps | |
| Base station capability | Mbps | 172.08 |
| Modulation and coding scheme (MCS) table | N/A | [39] |
| Suspending coefficient | N/A | 0.95 |
| Scenario | |||
|---|---|---|---|
| A | 50 | 50 | 50 |
| B | 50 | 150 | 150 |
| C | 150 | 50 | 50 |
| D | 150 | 150 | 150 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hasegawa, R.; Okamoto, E. Adaptive Transmission Suspension of V2N Uplink Communication Based on In-Advanced Quality of Service Notification. Vehicles 2023, 5, 203-222. https://doi.org/10.3390/vehicles5010012
Hasegawa R, Okamoto E. Adaptive Transmission Suspension of V2N Uplink Communication Based on In-Advanced Quality of Service Notification. Vehicles. 2023; 5(1):203-222. https://doi.org/10.3390/vehicles5010012
Chicago/Turabian StyleHasegawa, Ryo, and Eiji Okamoto. 2023. "Adaptive Transmission Suspension of V2N Uplink Communication Based on In-Advanced Quality of Service Notification" Vehicles 5, no. 1: 203-222. https://doi.org/10.3390/vehicles5010012
APA StyleHasegawa, R., & Okamoto, E. (2023). Adaptive Transmission Suspension of V2N Uplink Communication Based on In-Advanced Quality of Service Notification. Vehicles, 5(1), 203-222. https://doi.org/10.3390/vehicles5010012