1. Introduction
The perception of continuous whole-body vibration varies among the population. Humans least sensitive to vibration, who correspond to a low percentage of the population, can perceive vibrations in the range of 0.01
to a 0.02
peak [
1]. A quarter of the population perceives a vibration only if it has magnitude greater than 0.01
and half of the typical population, regardless of their position (standing or seated), is capable of perceiving a vertical weighted peak acceleration of 0.015
[
1,
2]. Yet, the exposure of the human body to mechanical vibrations can create discomfort or even be harmful.
While being in a traveling vehicle, vibrations can cause to the driver and the passengers digestion problems, fatigue and discomfort [
3]. The acceptable values of vibration magnitude for comfort depend on passenger expectations with regard to the trip duration, type of passenger’s activities during the trip (reading, eating, writing) and factors such as acoustic noise, temperature, etc. [
1]. Even though the perception of vibration is not universal, a rough qualitative assessment of ride comfort during deterministic excitation can be provided by the maximum value of the acceleration. If the maximum value of acceleration is equal to or less than 0.5
the ride comfort can be considered as good [
4].
According to ISO 2631-1 [
1], the following values of the overall vibration total values provide an approximate comfort scale in public transport:
<0.315 not uncomfortable,
0.315 to 0.63 a little uncomfortable,
0.5 to 1 fairly uncomfortable,
0.8 to 1.6 uncomfortable,
1.25 to 2.5 very uncomfortable,
>2 extremely uncomfortable.
The abovementioned values are the RMS values of acceleration.
Moreover, ISO 2631-5 [
5] refers to the evaluation of the human exposure to whole body vibration in terms of mechanical vibration and shock. Particularly, the way that the results of vibration measurements can be analyzed to provide information for the assessment of the risks of adverse health effects to the vertebral end-plates of the lumbar spine for seated individuals due to compression is analyzed [
6].
The suspension system of a vehicle plays an important role in its dynamic behavior. One main function of the suspension system of a vehicle is to isolate the chassis mass from the vibrations induced by the road profile unevenness and other external disturbances. The vehicle seats further contribute to the reduction in the vibrations that can be perceived by the driver and the passengers [
7,
8,
9]. In order to simulate the dynamic response of a vehicle and optimize its ride comfort, different lumped parameter models exist in the literature. These models, depending on their objective can simulate (a) the vehicle alone, (b) the vehicle and the seat or (c) the vehicle, the seat and the driver.
Lumped parameter models of a vehicle can differ in the number of degrees of freedom (DOFs), the planes where the movement of the vehicle is simulated (vertical, transverse, longitudinal), the inclusion of nonlinearities in the stiffness and damping elements and the consideration of control strategies in terms of semi-active and active suspension systems [
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
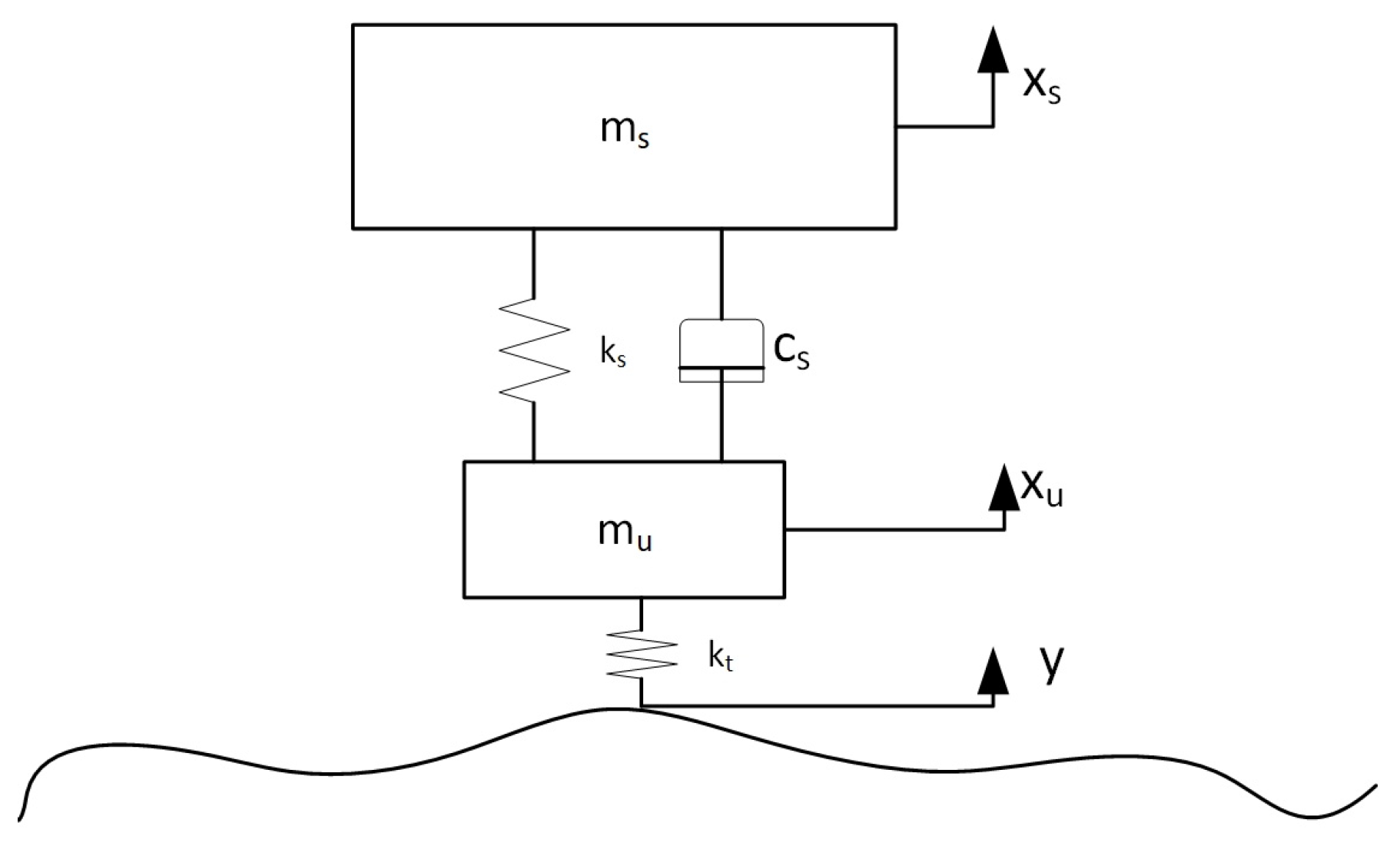
20]. The simplest lumped parameter model of a suspension system is the Quarter Car (QC) model which consists of two masses (sprung and unsprung mass) interconnected with a stiffness and a damping element. Furthermore, a stiffness element is used to simulate the tire stiffness [
11,
21]. The QC model has two DOFs and simulates the movement of the vehicle in the vertical plane. According to Verros et al. [
22] such a lumped parameter model subjected to excitation is commonly employed in the automotive industry mostly to predict the dynamic response identification, optimization and control of ground vehicles. The same model is also used in the automotive industry for the preliminary design of the suspension of a vehicle. The common use of this vehicle model is due to its simplicity and the fact that it provides qualitatively correct information, especially for ride and handling studies.
Similarly, the lumped parameter models of the driver (seated human body) are characterized by the number of DOFs which varies according to the total number of masses used to simulate the human body in a seated position [
23,
24] and correspond to its level of detail. Furthermore, these models differ in the way these masses are connected to each other (parallel or in series). Finally, they can contain linear or nonlinear stiffness and damping elements. It is important to note that since the human body is a complex structure, the parameters of the lumped parameter models are not consistent with the actual parameters of human anatomy and biodynamics [
24]. One of the first lumped parameter models of the human body is a one DOF linear model developed by Coermann in 1962. In 1974, Muksian and Nash [
25] developed a two DOFs nonlinear model to describe the dynamic response of the human body under different excitation frequencies. A two DOFs linear model was developed by Wei and Griffin in 1998 [
26] to predict the seat transmissibility. A three DOFs linear model was also developed from Gao et al. [
27] and later on from Kang [
28]. Boileau and Rakheja [
29] modeled the human body using a four DOFs lumped parameter model including nonlinearities in the stiffness and the damping elements parameters [
30].
In the literature, the abovementioned models have been integrated into vehicle models, including the seat or not, in order to provide estimates of the vibrations induced in the human body while in a moving vehicle. The integrated Vehicle–Seat–Human (VSH) models are widely used for the optimization of the characteristics of the vehicle suspension considering road holding and ride comfort with a variety of objectives. The root-mean-square (RMS) value of the driver’s head acceleration is often included as an optimization objective for optimal suspension and/or seat design. In [
30], head acceleration, its crest factor, the suspension deflection and the tire deflection were used, combined as one objective function in order to optimize the properties of a driver’s seat and the suspension of a vehicle using Genetic Algorithms. Later, Abbas [
31,
32], again using Genetic Algorithms, used an objective function combining head and seat acceleration as well as seat working space, in order to obtain the optimal design of a seat suspension. A similar objective function with the same optimization algorithm was also used [
33,
34] to optimize the parameters of a suspension system, also considering ride comfort. Furthermore, in [
34] three objective functions were used and the Pareto front was created. Searching for an optimal design with a nonlinear passive suspension system [
35] and for an optimal semi-active suspension [
36,
37], the values of the vibration dose of the head and the crest factor of the head were also used. Nagarkar [
21,
38] also considered the RMS head acceleration along with the amplitude ratio of the head RMS acceleration to seat RMS acceleration, the amplitude ratio of the upper torso RMS acceleration to seat RMS acceleration, the crest factor, the suspension space deflection and the dynamic tire deflection in order to optimize a passive suspension and later, present control strategies for an active suspension. In 2020, the head acceleration was used as a metrics for ride comfort in order to evaluate the performance of a magneto-rheological damper implemented for a seat suspension [
3].
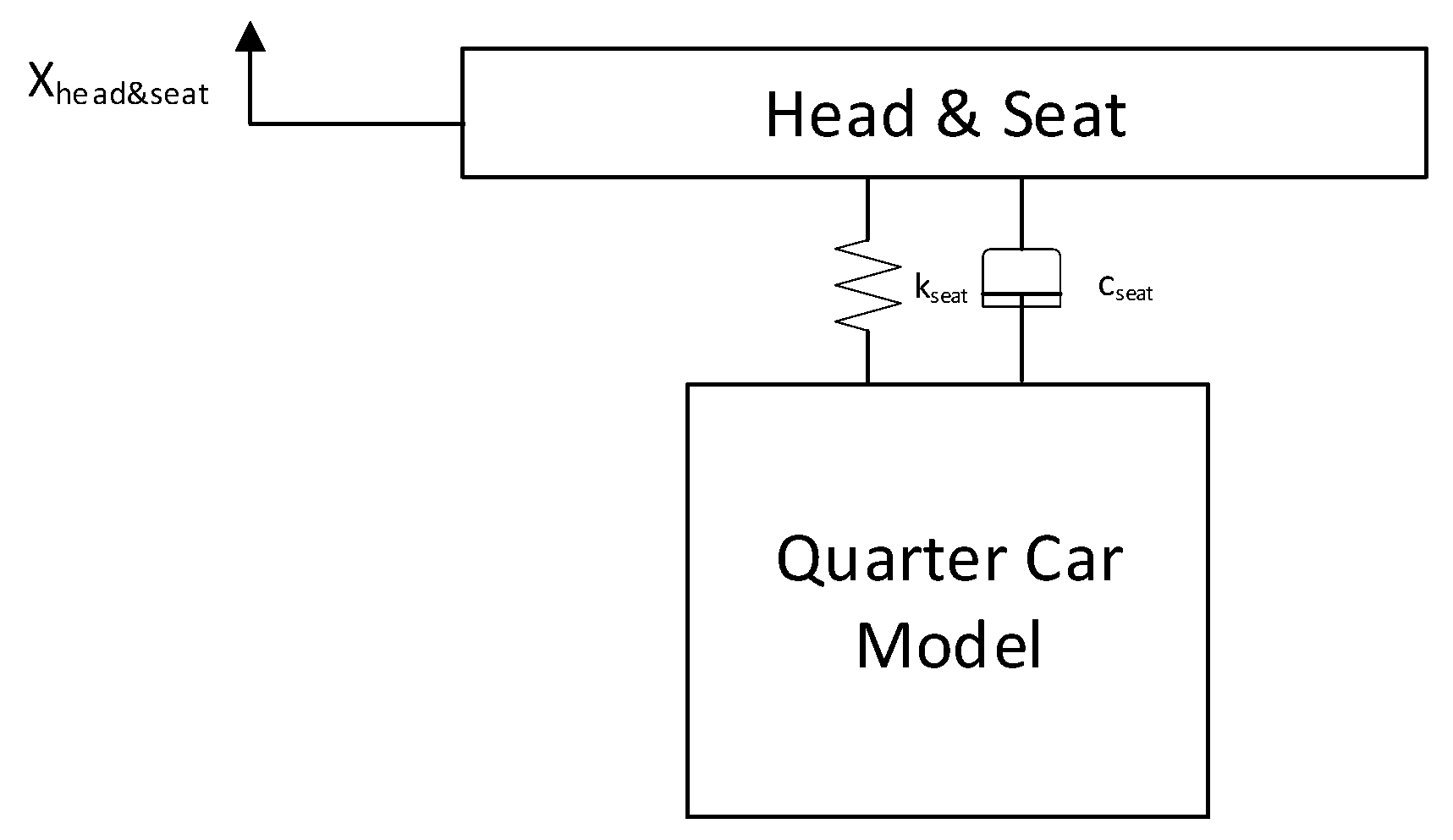
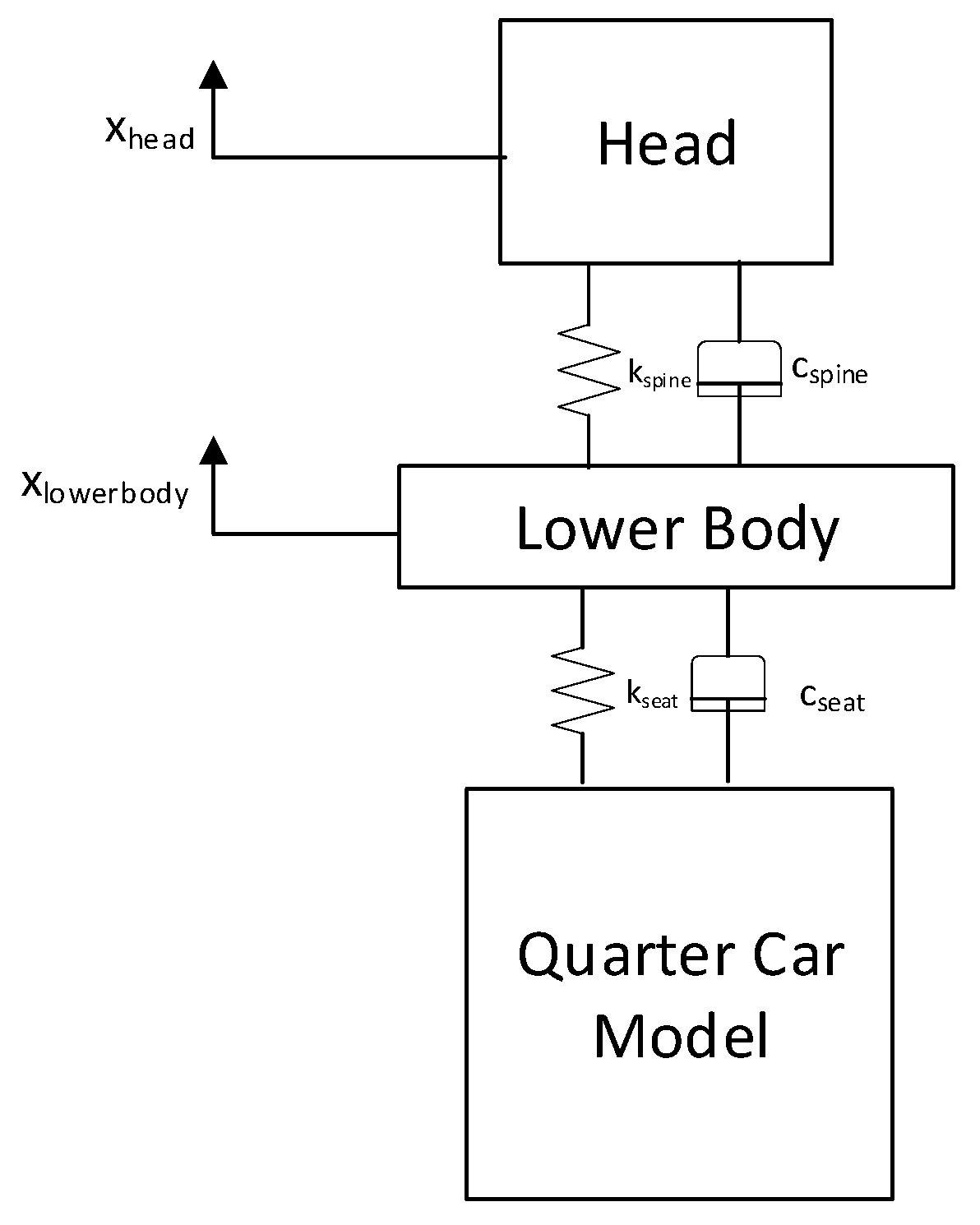
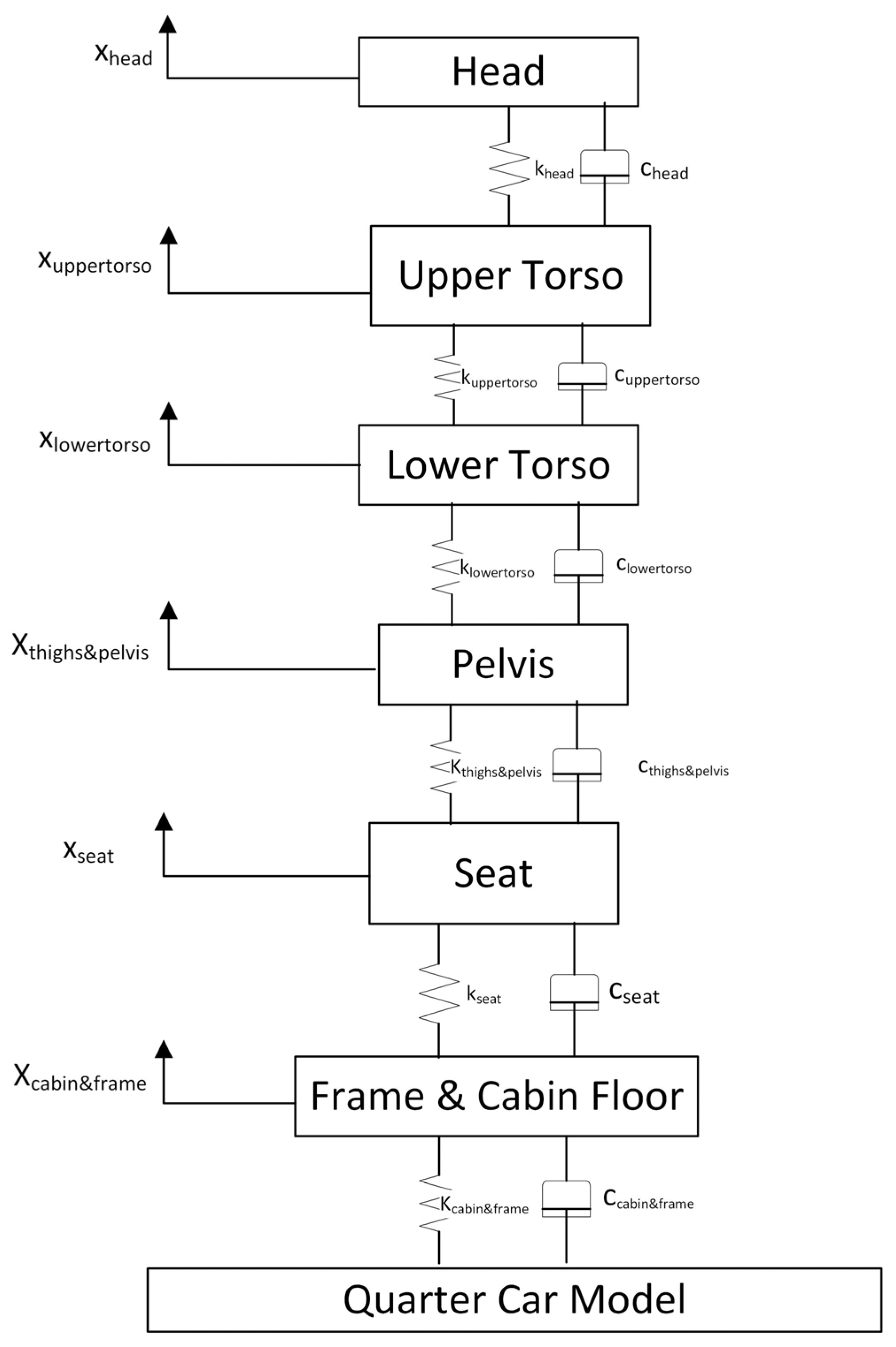
In the present paper, the performance of three VSH models, with three, four and eight DOFs based on the QC model was explored and compared in terms of efficiency with the QC model. All VSH models have already been used in the literature in ride comfort evaluation studies. The objective of this work is to indicate the minimum required level of detail of a lumped parameter model used to evaluate ride comfort in the vertical plane. The minimum required number of DOFs is important for both computational efficiency and simulation accuracy, since for each VSH model, the values of their lumped parameters should be set to simulate the vehicle, the seat and the human body characteristics as closely as possible.
Within this framework, two, three, four and eight DOFs models have been set up in the Matlab programming environment and they have been compared in terms of dynamic response and computational efficiency using excitations of different characteristics and different longitudinal velocities for the vehicle. This way the effect of the level of detail of the lumped parameter model can be also associated with the excitation and the longitudinal velocity. It should be noted that the values of the parameters (masses, stiffness coefficients and damping coefficients) of the VSH model were modified from those retrieved in the literature in order to simulate the same seat and human body, as closely as possible.
In
Section 2 and
Section 3 all lumped parameter models and excitations are described, respectively. In
Section 4 the dynamic response of each model is presented for all excitations and three different longitudinal velocities of the vehicle. Then, in
Section 5, the performance of the VSH models in terms of the head acceleration and the computational efficiency is monitored in the same excitations and the results are thoroughly discussed.
5. Discussion
Firstly, the dynamic response of the QC model was explored, providing an insight into the vehicle model which is the base of all the presented VSH models in
Section 2. In
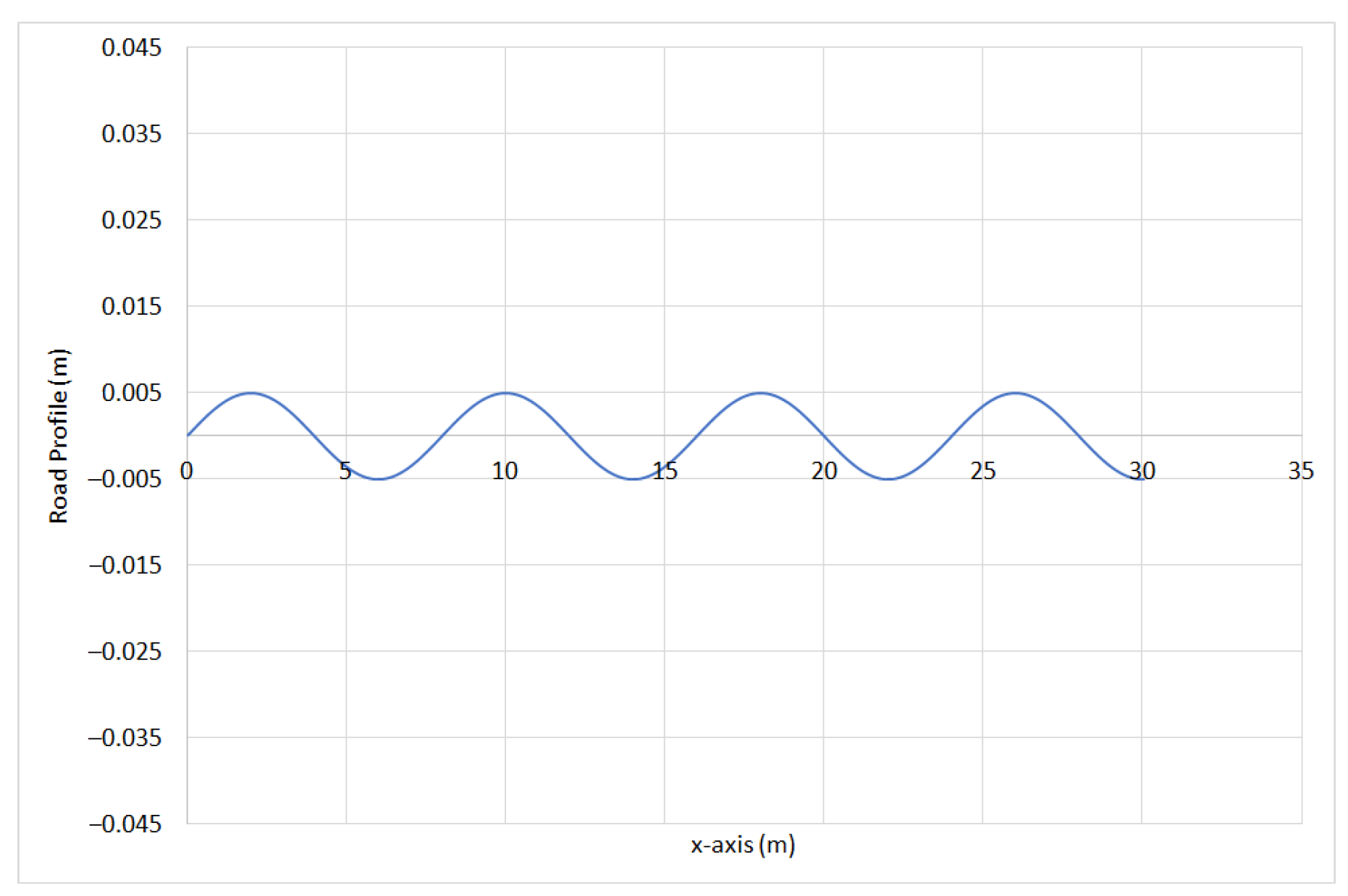
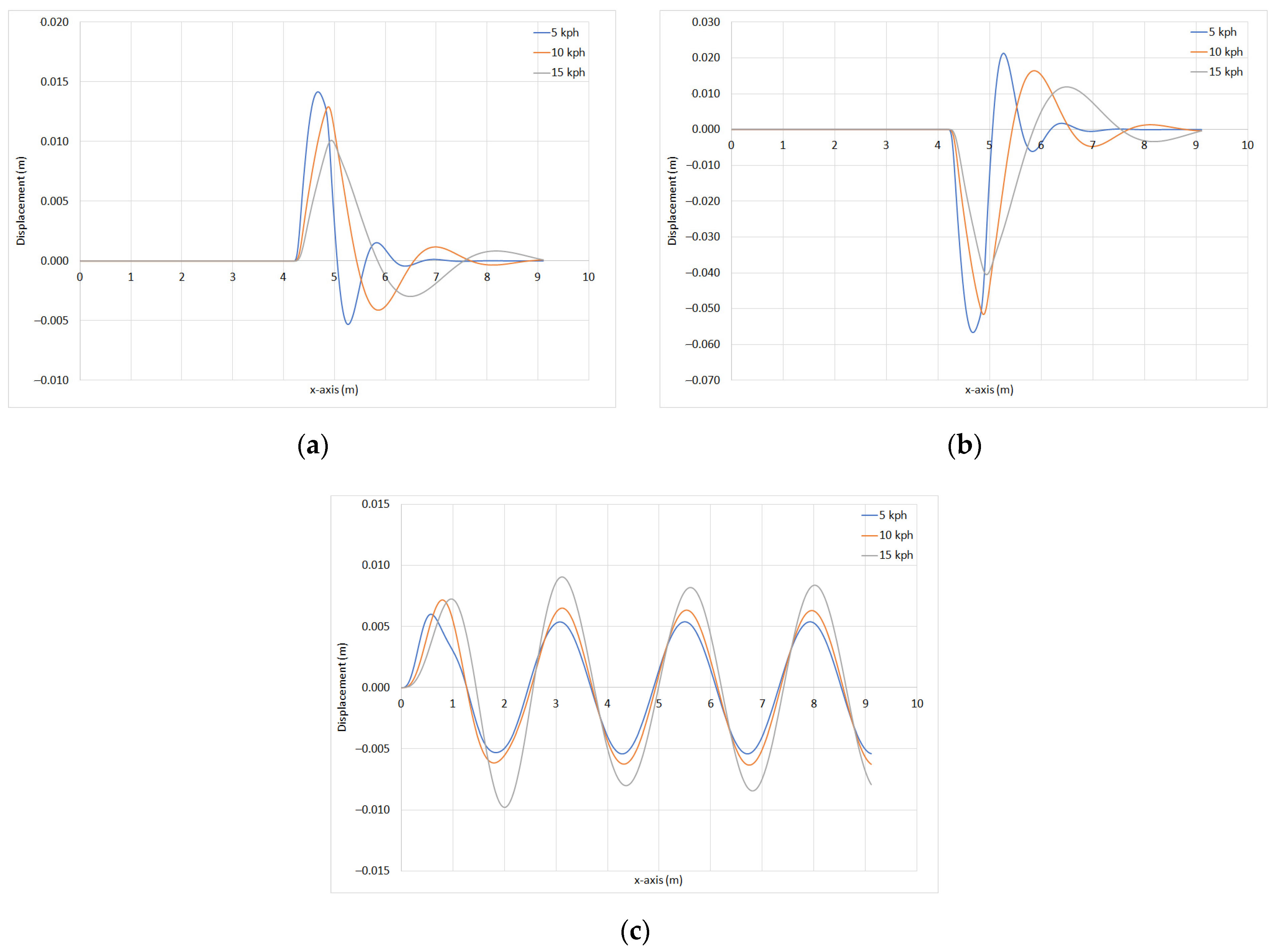
Figure 9 the vertical displacement versus the longitudinal location of the vehicle is presented showing that for the single disturbance events, as the speed of the vehicle increases the peak displacement decreases, while for the periodic excitation an increase in the speed of the vehicle causes an increase, also, in the maximum value of the vertical displacement of the sprung mass. In
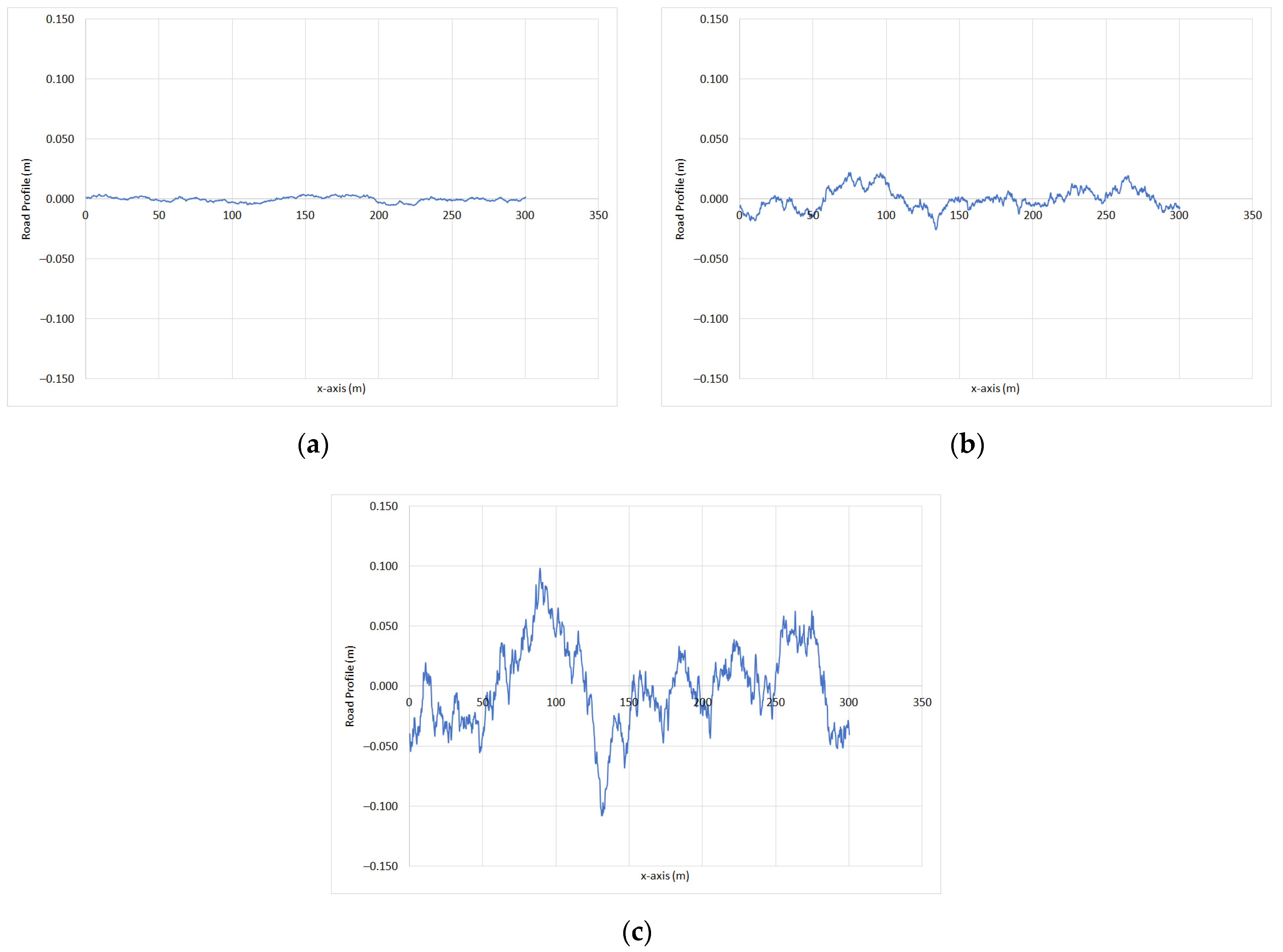
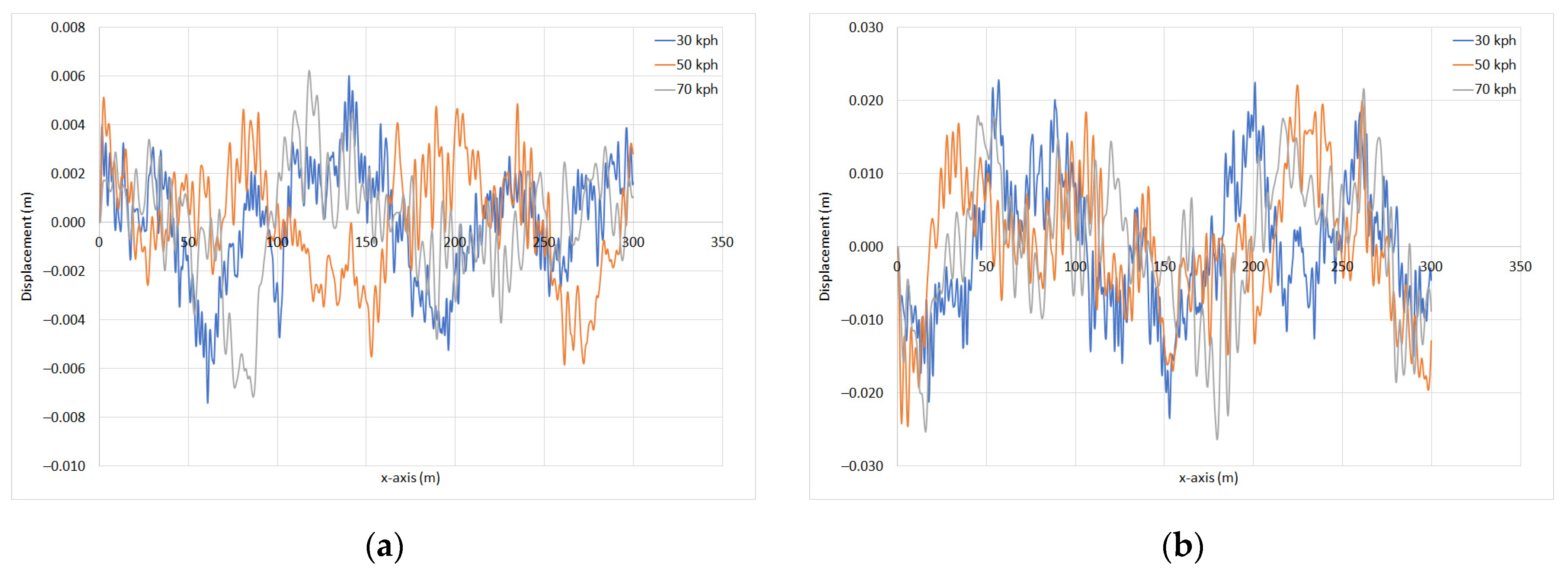
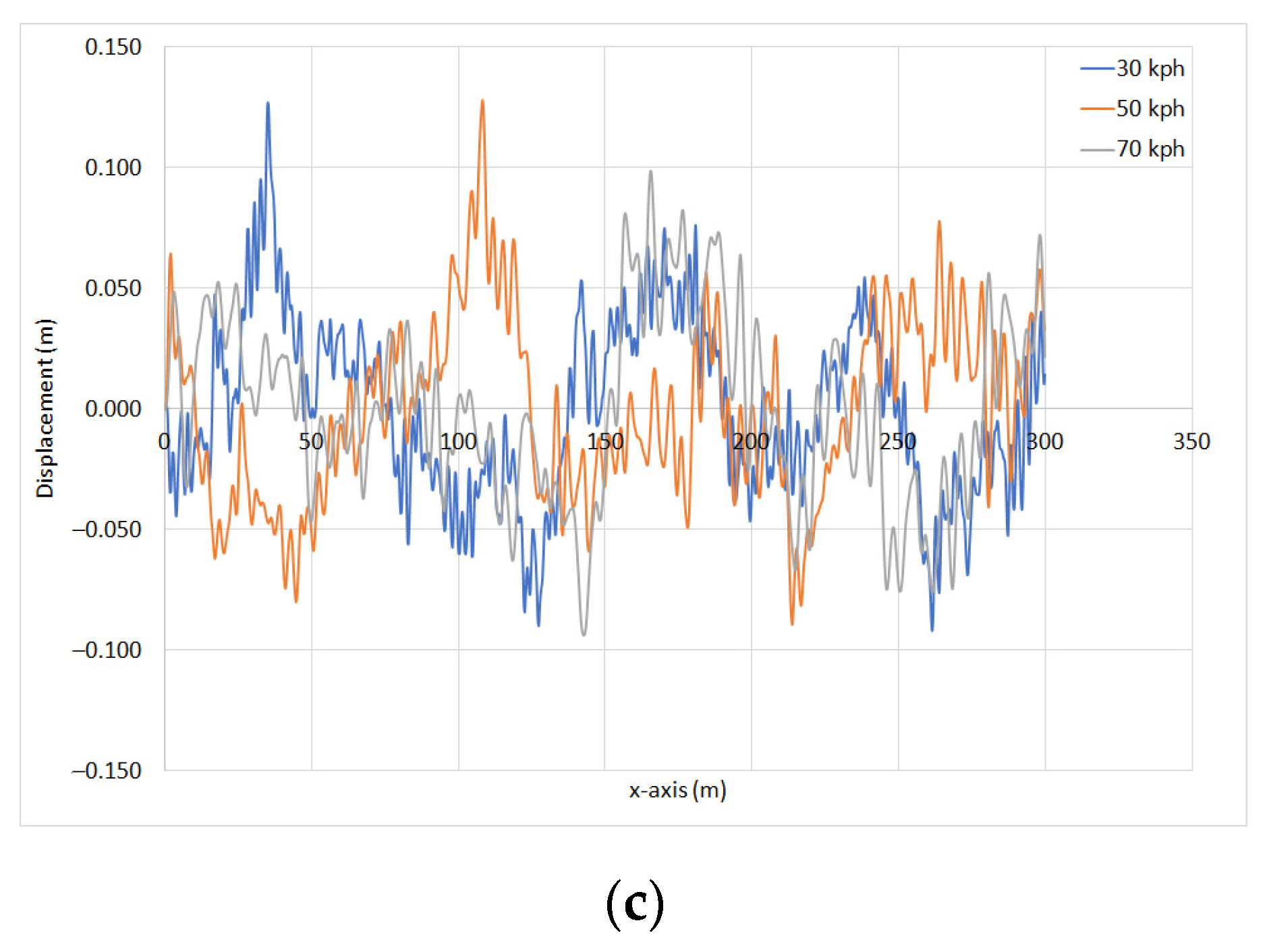
Figure 10, presenting the dynamic response of the QC model in stochastic excitations, there is no association of the maximum displacement with the vehicle speed but there is a straight association of the grade of the road profile with the maximum displacement. As it was expected, the maximum value of the vertical displacement was met for the road profiles of Grade E. Although ride comfort is directly correlated to acceleration, the displacement response of the QC model was presented in order to provide an overview of the response of the system.
In
Table 7,
Table 8,
Table 9 and
Table 10, where the peak (
Table 7), the VDV (
Table 8) and RMS (
Table 9 and
Table 10) values of the acceleration are provided for all excitations for the QC model, it is obvious that the sprung mass has lower values of vertical acceleration than the unsprung mass, as it was expected. Furthermore, in
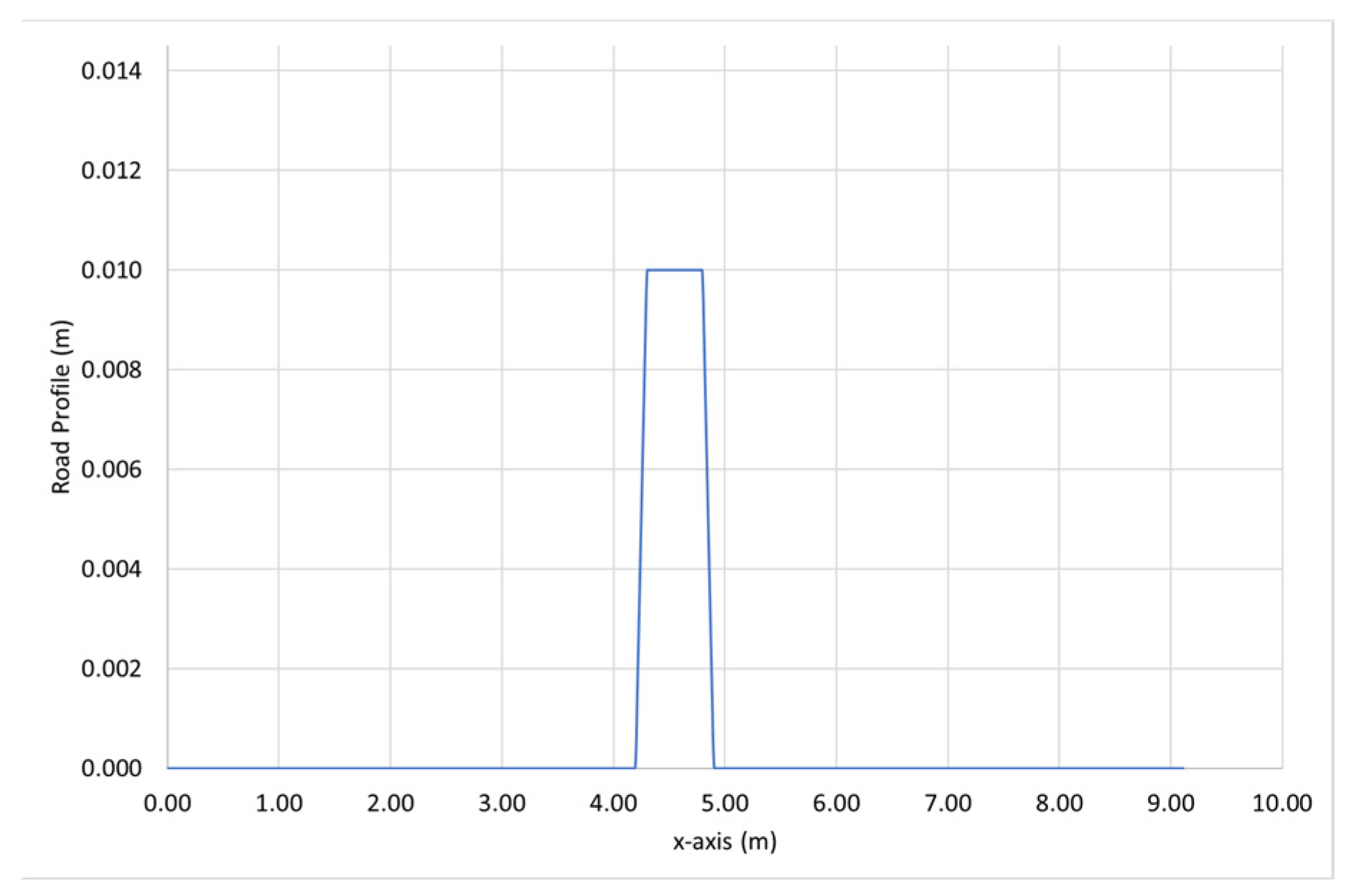
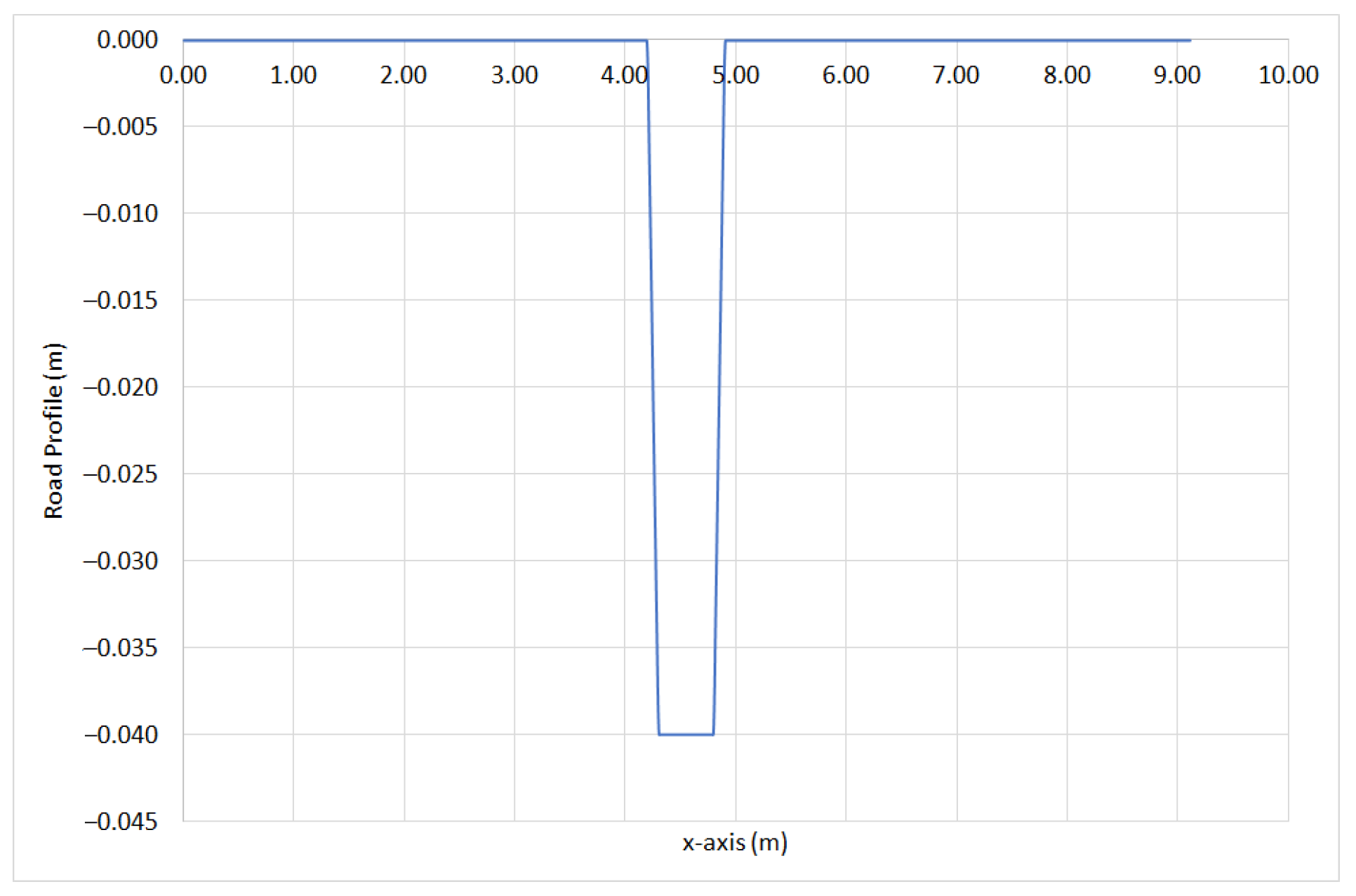
Table 7 and
Table 8 it is shown that the provided pothole excitation consists of a rougher excitation than the bump. Moreover, the increase in the vehicle longitudinal velocity leads to an increase in the peak, the VDV and the RMS values of the vertical acceleration, depending on the type of excitation.
Given the dynamic response of the QC model, the dynamic response of the different VSH models is explored. In
Figure 11, concerning single disturbance excitations, it is obvious that the peak, VDV and RMS values of the acceleration have the same behavior. Particularly, the QC model has the highest value of vertical acceleration of the top DOF, while the VSH model with eight DOFs has the lowest one. Furthermore, the VSH with three DOFs has almost the same value as the VSH model with four DOFs. In
Figure 14 the difference in the VDV of the top DOF for the VSH models with respect to the VDV of the sprung mass DOF of the QC model is presented for the single disturbance events. For the three DOFs model the difference ranges from 18–51% depending on the excitation and the longitudinal velocity of the vehicle (blue corresponds to 5 km/h, orange to 10 km/h and grey to 15 km/h). For the four DOFs model the difference ranges from 35–69% and for the eight DOFs it ranges from 49–74%.
In
Figure 14, as expected from the percentage (%) of difference, it is also obvious that in the case of the single disturbance excitations the relative behavior of all the models is the same regardless of the excitation. All the VSH models provide a lower VDV for their top DOF. The lowest VDV is provided by the top DOF of the VSH model with eight DOFs.
In
Figure 12, concerning the periodic excitation it is observed that the VSH models with three and four DOFs have similar results, while the QC model has the lowest value of the RMS vertical acceleration followed by the VSH model with eight DOFs.
The same observation can also be made in
Figure 15 where the difference between the RMS values of the vertical acceleration of the VSH models with respect to the QC model are presented, also taking into consideration the longitudinal velocity.
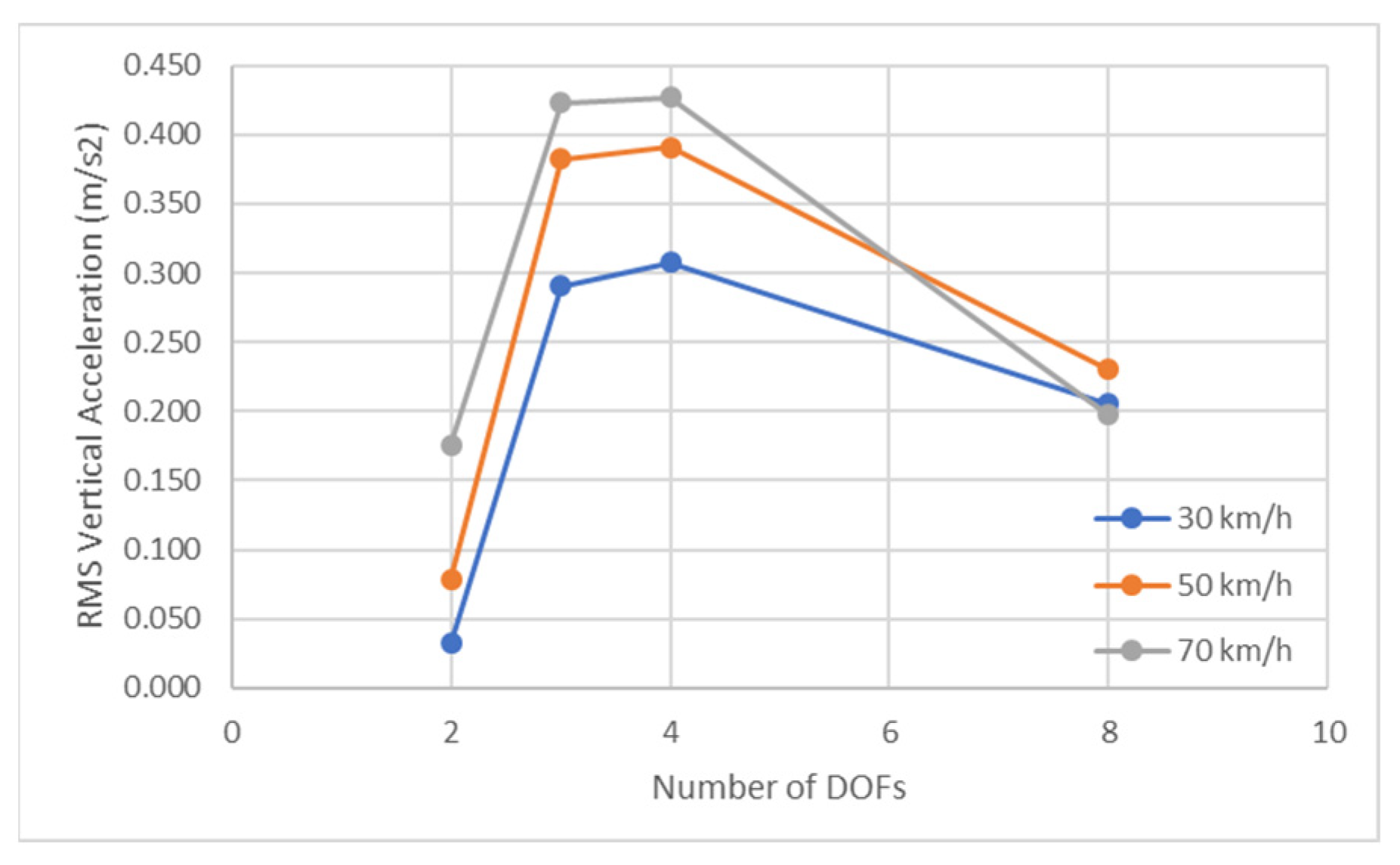
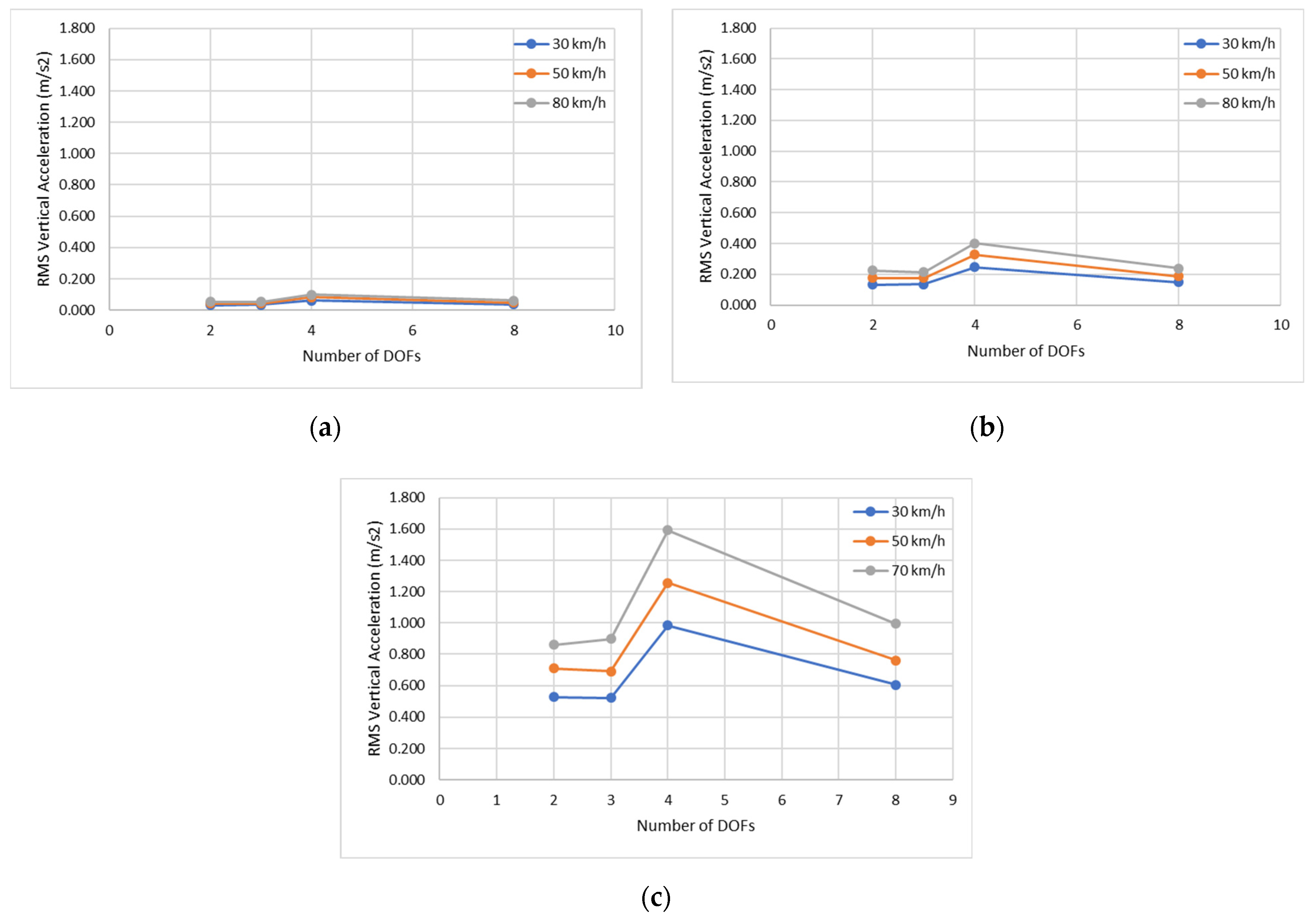
A similar behavior, concerning the VSH models can be observed also in
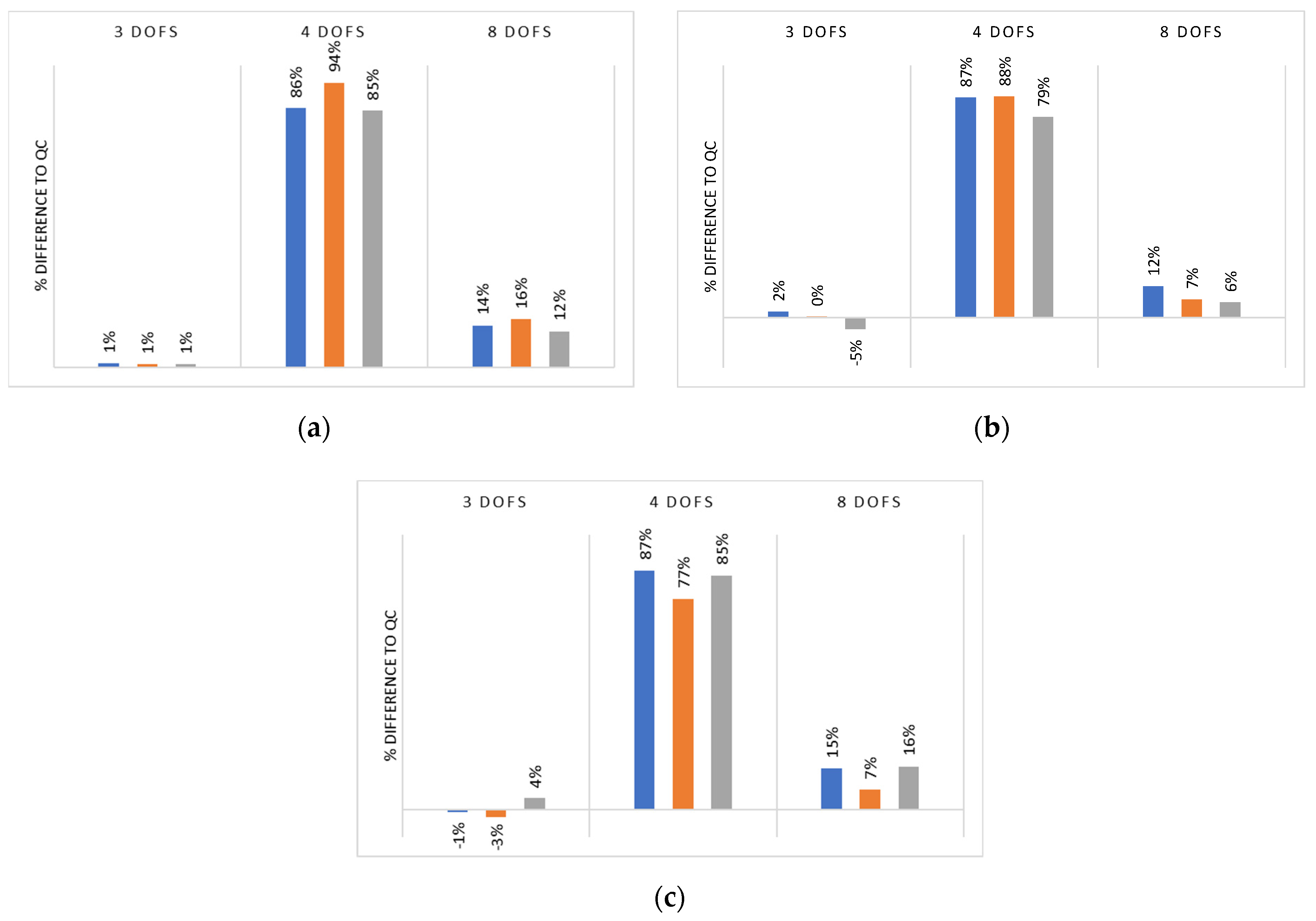
Figure 13, presenting the RMS value of the vertical acceleration for the stochastic excitations. In more detail, the VSH model with four DOFs has the highest RMS value of vertical acceleration, the VSH model with three DOFs has the lowest one and the model with eight DOFs is close to that. On the other hand, in the case of the stochastic excitations the QC model has the lowest values of the RMS for the vertical acceleration. In
Figure 16 the abovementioned percentage is provided for the road profiles of Class A, C and E.
In the case of the stochastic excitations, the VSH model with the four DOFs has an RMS value of an acceleration 70% higher than that of the QC model, while the VSH model with three DOFs provides a lower RMS value of vertical acceleration compared to the QC model that has a value less than 5%. The VSH model with eight DOFs provides RMS values of an acceleration that is 6–16% larger than that of the QC model. It is worth mentioning that in the case of the stochastic excitations, the longitudinal velocity of the vehicle does not affect the RMS value of the vertical acceleration of the top DOF of the VSH model in the same way as it does in the singular or the periodic excitations.
As far as the computational efficiency of the VSH models, in
Table 11 it can be observed that an increase in the DOFs of the VSH model by 1 causes an increase in the CPU time from 2.1 to 2.6%, respectively, for the road profile while increasing the number of DOFs by 5 increases the CPU time from 7.4 to 11.5%.
The findings of this work can be considered consistent with the findings of [
49] who compared a two, three and four DOFs model to experimental data, and they concluded that the two DOFs model provided results closest to the experimental ones.
6. Conclusions
The objective of this paper was to compare the performance of different existing VSH models used for the evaluation and the optimization of the ride comfort of vehicles in terms of the reliability and computational efficiency, in order to determine the minimum required number of DOFs for a VSH model. It is important to note that despite the number of DOFs required for the VSH model, the values of the used lumped parameters should be set in a way to simulate the vehicle, seat and human body characteristics as closely as possible. Thus, three lumped parameter VSH models with a different number of DOFs and a linear connection between the masses, based on a QC vehicle model and simulating the same vehicle, seat and human were set up in a Matlab programming environment. Their dynamic response to three types of excitations with different characteristics and different longitudinal velocities was calculated in terms of the acceleration, velocity and displacement.
The dynamic response was proven to be dependent on the number of DOFs of the VSH models, providing different peak, VDV and RMS values of the vertical acceleration. Moreover, the type of excitation affected the dynamic response of the VSH model with respect to that of the QC model. In particular, in the case of single disturbances, the VSH model with eight DOFs resulted in the lowest peak, VDV and RMS values of the acceleration for the top DOF. For the three DOFs model, the difference between its VDV and the VDV of the QC model ranged from 18–51% depending on the excitation and the longitudinal velocity of the vehicle. For the four DOFs model the difference ranged from 35–69% and for the eight DOFs it ranged from 49–74%. On the contrary, for the periodic excitation it was noticed that the VSH models with three and four DOFs provided close RMS values of the vertical acceleration for the top DOF, two to eight times larger than that of the QC model, while the eight DOFs model provided values up to five times larger than those of the QC model. Finally, in the case of the stochastic excitations the RMS values of both the VSH model with three and eight DOFs were close to those of the RMS values of the sprung mass of the QC model (−3 to 16%). The model with the four DOFs provided RMS values of the vertical acceleration that were 77–94% larger than those of the QC model.
As far as the computational efficiency of the VSH models is concerned, it was shown that the greater difference in the CPU time for one evaluation of the VSH models was less than 12%.
Taking into account the aforementioned observations, it becomes apparent that the selection of the proper VSH model based on a QC model depends solely on the requirements of the ride comfort study. Considering that the QC model, which is the base of all the investigated VSH models, simulates the vertical dynamic response of a vehicle in a qualitative manner, it is evident that there is no gain in considering a detailed Seat–Human system in a vertical VSH model when only the vehicle suspension is under investigation. Hence, in the case of the optimization of ride comfort, the minimum number of required DOFs should be defined with respect to the design variables and the objectives of the optimization procedure. Specifically, if the modeling objective is to optimize the ride comfort, altering the suspension characteristics the QC model (two DOFs) is sufficient while if the seat characteristics are going to be optimized, a VSH model consisting of three DOFs should be preferred as it is sufficient and computationally efficient. Finally, a VSH model with four DOFs (unsprung, sprung, seat, seated human body) should be used when the seat transmissibility is considered during the optimization procedure either as an objective or as a constraint.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}