Abstract
Road surface friction, or in other words, a pavement’s skid resistance, is an essential attribute of highway safety, acting as a liaison between the infrastructure condition and the driver’s response to it through proper vehicle maneuvering. The present study reviews aspects related to the tire–road friction, including affecting factors, monitoring systems and related practices, and demonstrates the efficacy of using smart tires, or tires embedded with sensors, for the purpose of evaluating roadway friction levels in real-time while traveling. Such an approach is expected to assist drivers in adjusting their behavior (i.e., lowering their speed) in the event that signs of reduced skid resistance are observed in favor of road safety. The current challenges and research prospects are highlighted in terms of tire manufacturers’ perspectives as well as future mobility patterns with autonomous driving modes. Overall, smart tires are commented as a tool able to enhance drivers’ safety for both current and future mobility patterns, help to control pavement deterioration and complement existing practices for infrastructure condition assessment.
1. Introduction
Rubber tires play one of the most important roles regarding both vehicles’ performance and driving safety since these are the only parts of the vehicle that come in direct contact with the road surface [1]. Hence, there have been various studies from both tire and road pavement perspectives trying to assess the interaction between vehicle tires and the road surface to obtain valuable information regarding vehicle stability through the developed friction [2].
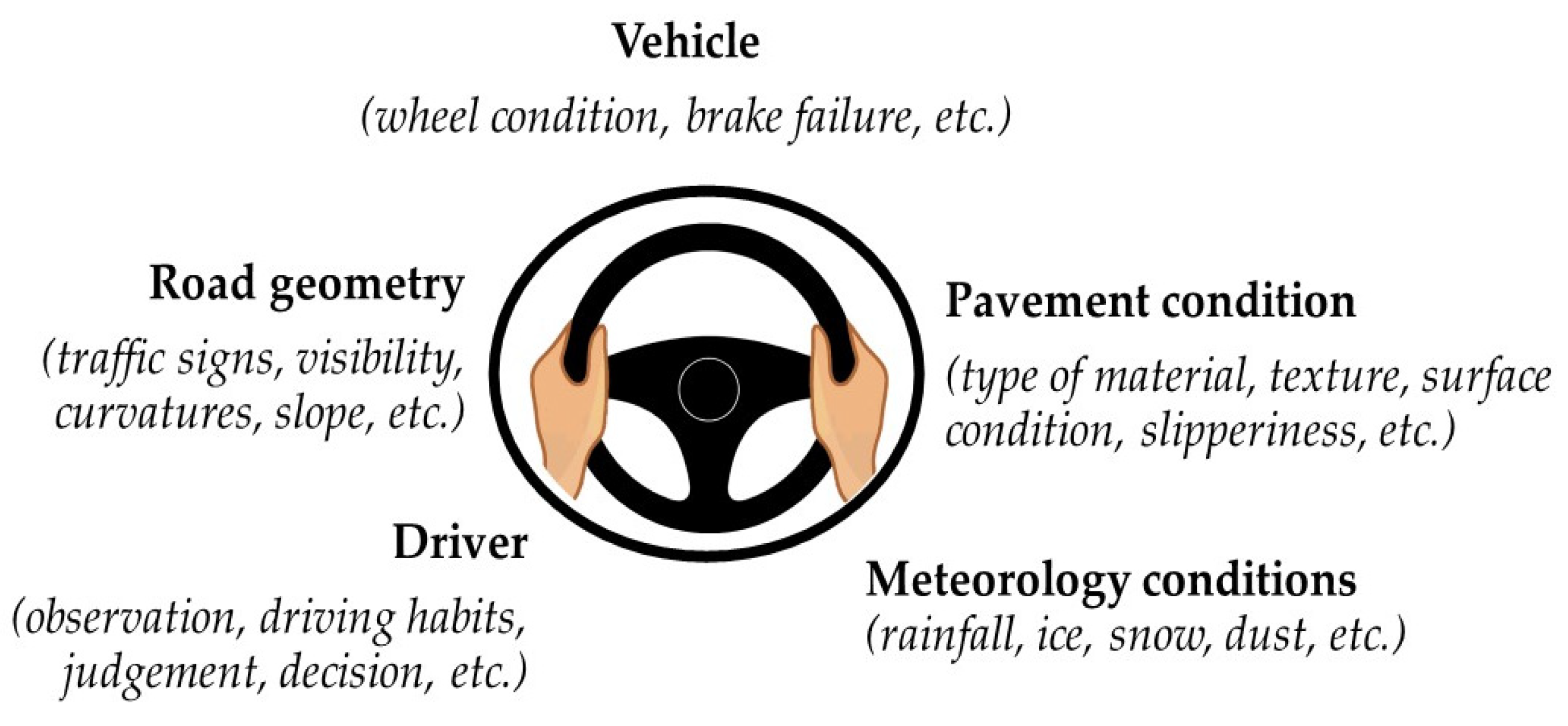
It is a well-acknowledged fact that the road friction is drastically related to safe driving conditions and road incidents [3,4,5]. According to [6], nearly 120,000 people were killed on US roadways between 2010 and 2013. The economic costs are undeniably unaffordable even in the case of non-fatal incidents [7], together with the social disturbance that can come as a result of unsafe and non-friendly infrastructures. Therefore, a critical number of studies have been devoted to road safety issues. However, this is a multi-parametric issue that can be addressed by different scientific disciplines (Figure 1) that can be related to vehicle tires, driving behavior, road geometry features, pavement condition and meteorological conditions [3,8,9,10,11].
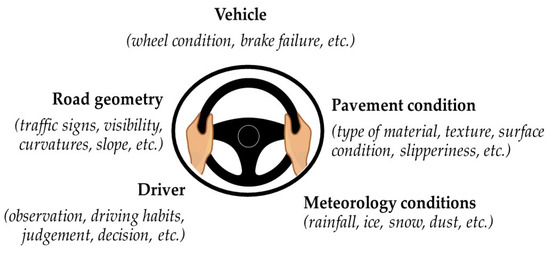
Figure 1.
Components of safe driving.
Focusing on the tire–pavement interaction, the importance of reducing road crashes by improving road infrastructure characteristics and ensuring a safe ride quality becomes a top priority in several Pavement Management Systems (PMS) [4,12,13]. This is because pavement surface friction is an essential attribute of highway safety. In this context, measuring friction becomes a rational approach for both vehicle tire industries and highway agencies. However, the previous domains approach friction from a different perspective.
In road engineering, the purpose is to periodically monitor road surface characteristics at predefined intervals (e.g., once or twice per year, or even more frequently) depending on the established priorities and the considered PMS strategy of the in-charge highway agency [14]. A multitude of systems exists to measure pavement friction, or its skid resistance, that measure both the longitudinal and lateral friction coefficient [15]. The goal of such measurements is to assess the current pavement condition and propose a timeline of when appropriate actions are needed to maintain friction at a sufficient level or even restore it in the case of significant serviceability loss. Nevertheless, in the absence of a well-established PMS system, which is not something unusual, especially for urban or secondary rural roadways, the procurement and the transportation logistics of multiple and expensive equipment becomes a deterrent factor. This is why smart sensing system data acquisition platforms (e.g., unmanned aerial vehicles, ground vehicles for contactless measures, smartphone-based assessment, etc.) have been revealed during recent decades as practical, cost-effective and resilient assessment tools in many aspects of roadway engineering [16,17,18,19,20].
In the meantime, road safety from a vehicle perspective highly depends on the instantaneous driving attributes (e.g., localized areas with poor friction, adverse weather conditions, damaged tires, contaminated grooves, etc.). Thus, considering the need to provide drivers with timely and accurate information about road surface characteristics, there have been relevant investigations focusing on the utilization of sensors adjusted on vehicle tires in order to alternatively collect friction datasets [1,21,22,23]. The main reason for conducting targeted research efforts on tire sensors is that they can be used as effective vehicle controllers and provide, at the same time, information about road conditions, tire conditions and their interaction too. It is believed that this approach can significantly improve ground vehicle safety. This is especially true when it comes to assessing weather-related incidents.
According to [1], a weather-related crash is defined as occurring “in the presence of rain, sleet, snow, fog, wet pavement, snowy/slushy pavement, and/or icy pavement”. Therefore, a major question arises regarding the potential benefits of using smart sensors embedded in vehicle tires with the view of obtaining real-time information and proper alerts for adjusting the driving behavior. In addition, tire sensors can provide useful information for tire conditions (e.g., tire inflation pressure, damage to grooves, etc.) [24]. Most vehicle active safety systems, such as the Anti-lock Braking System (ABS), aim ultimately to make the tires controllable [25,26,27], meaning that the status information of the tire is especially important for all kinds of active safety systems and especially for self-driving vehicles [28,29]. In this context, it cannot be overlooked that a significant portion of weather-related incidents could be potentially prevented by the use of tire sensors able to collect and generate real-time information. Nevertheless, improving driving safety unambiguously depends on other factors as well that act jointly, such as, the availability of information-communication systems for early warning.
Understanding sensors embedded in tires as a diagnostic tool for both vehicle and infrastructure components of a tire–pavement interaction system is usually followed by the introduction of the term “smart” or “intelligent” tire, which appears as a practical and cutting-edge technology wishing to assist road users while driving and potentially prevent collisions or fatal crashes. Such a vision generates research updates and innovations among the worldwide community of tire manufacturers that mainly act nowadays through pilot demonstration examples. Their features are quite wide, and some of them are centered upon the reduction in repair and maintenance costs of rubber tires, the minimization of rubber wear and tear, the provision of a more comfortable ride with maximized fuel efficiency and the well-ahead detection of pavement profiles or friction breakdowns in order to adjust the driving behavior [30]. Overall, it seems that the concept of smart tires can act in favor of increasing sustainability both in terms of the vehicle industry (i.e., effective tire design) and infrastructure engineering (i.e., road surface condition monitoring).
Therefore, the aim of this paper is to evaluate aspects related to the tire–road friction, which is critical for effective vehicle maneuvering and braking under various weather conditions, and highlight the potentialities of using smart tires for friction assessments. To meet this aim, a review of a pavement’s skid resistance aspects is first discussed in terms of its definition, affecting factors, monitoring systems and related practices. Thereafter, technological advances in the domain of tire sensors are presented that can act as smart data collection and monitoring tools. The investigation proceeds with the expansion of the existing knowledge on aspects regarding tire sensors, their capabilities and future prospects related to the use of tire sensors as an effective and autonomous means for improving road safety for current and future mobility patterns, where autonomous driving modes will dominate.
2. Tire–Road Friction
2.1. Definition
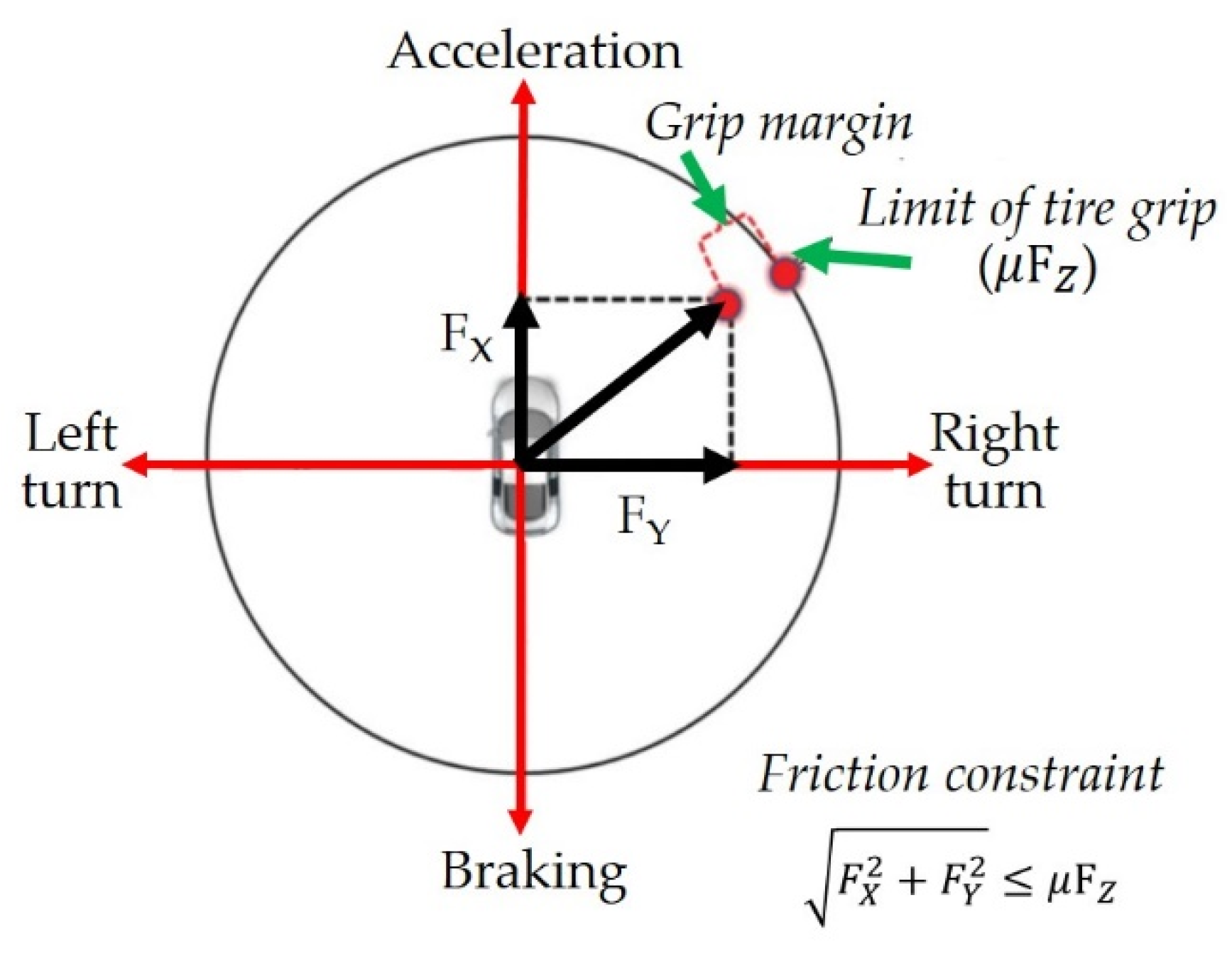
During vehicle movement and braking, resistance forces generate between tires and the pavement surface, which are determinants for vehicle stability and overall safe driving [31]. A common approach to understanding the mechanism of tire friction forces is the assessment of the friction circle concept illustrated in Figure 2. The vector sum of the longitudinal () and lateral () force components is controlled by the coefficient of friction () times the vertical load (). In other words, the friction coefficient is a dimensionless parameter equal to the maximum normalized traction force, defined as:
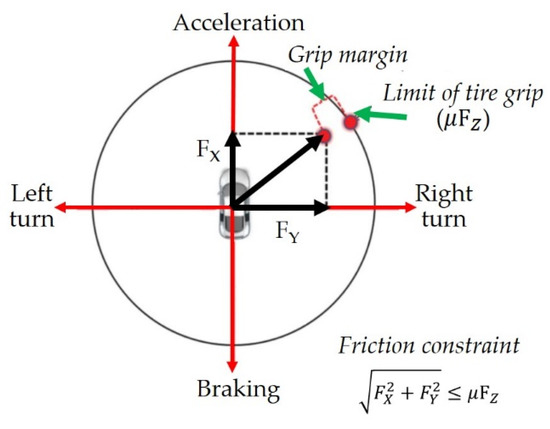
Figure 2.
Friction circle during vehicle typical maneuvering [32].
While a vehicle is braking, which is the most crucial interaction between the road surface and vehicle tires for road safety, friction appears as the developed resistive force that enables a controlled skidding action along the pavement surface [33]. Friction is more determinant in wet surfaces due to the risk of hydroplaning [34]. When a tire encounters more water than it can scatter, water pressure in the front of the wheel pushes water under the tire, which is then separated from the road surface by a thin film of water [35]. The phenomenon causes loss of steering, braking and power control. This is why rubber tires have grooves that aim to channel water from beneath the tire, raising the available friction.
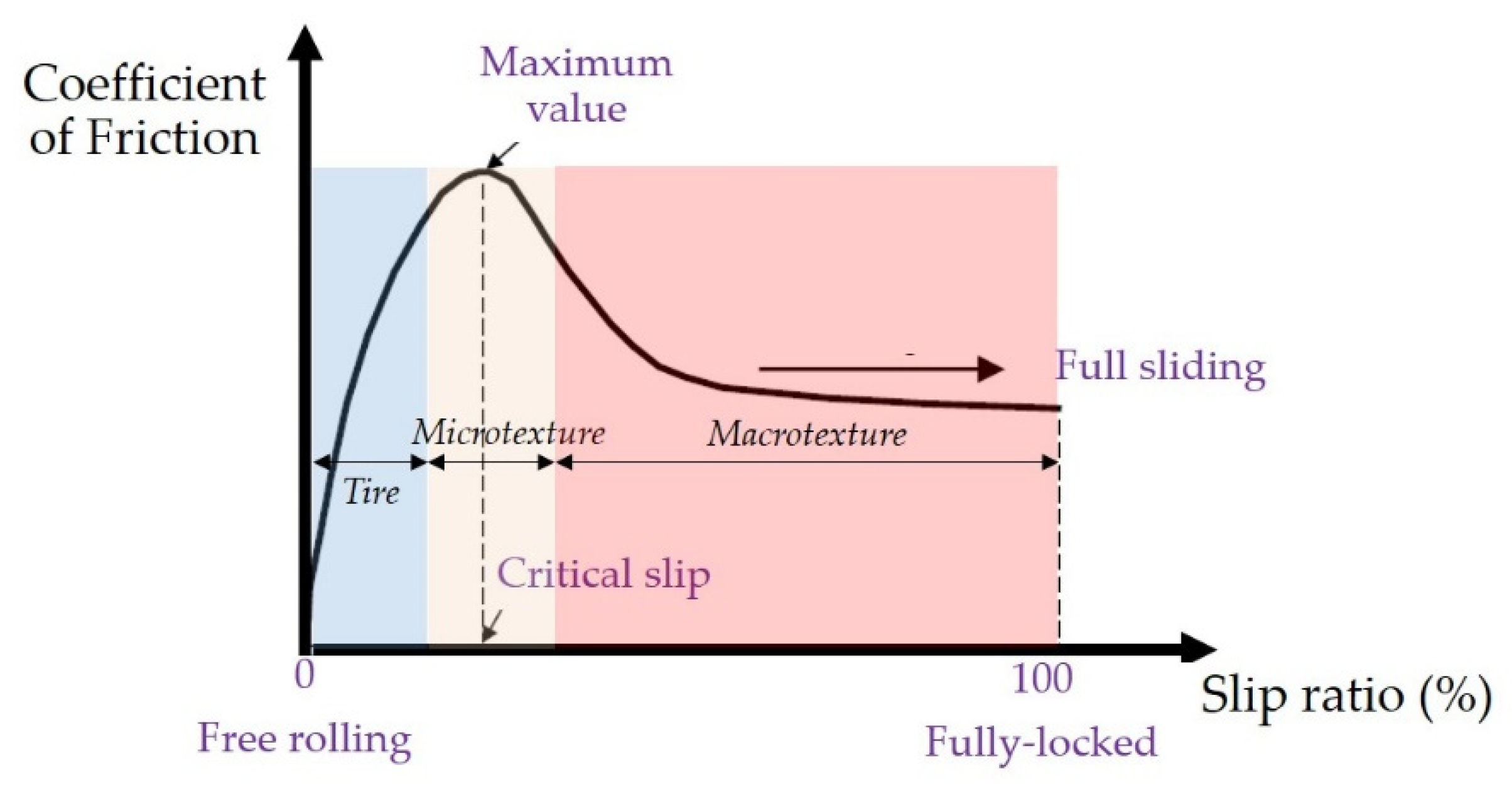
In general, friction does not remain constant during a vehicle’s movement (Figure 3). In particular, when a tire is exposed to free rolling, such as moving at a straight line, the tire-contact patch is instantaneously stationary, and there is almost no friction at the tire–road interface [33]. However, during any kind of maneuvering, including speed changes (i.e., braking) or direction (i.e., moving at curves), friction is developed at the interface as a response to acceleration, braking, or steering and a reaction force is developed at the tire–pavement interface that varies depending on the slip ratio. In more detail, for low slip ratios, the coefficient of friction increases rapidly (Figure 3) with an increase in slip as a result of the tire contribution. Friction increases until it reaches a peak value that usually occurs for a slip ratio ranging from 10 to 20% (critical slip). In this area, the pavement microtexture or, in other words, the surface aggregates’ mineralogy and shape dominate. Thereafter, friction decreases up to a value known as the coefficient of sliding friction, which occurs at 100% slip, corresponding to a fully blocked wheel that simply skids with no rotation. During the reduction area, pavement macrotexture is dominant, which is related to driving conditions at high speeds [36] and highly depends on the air void content of the surface of the coarse asphalt mix.
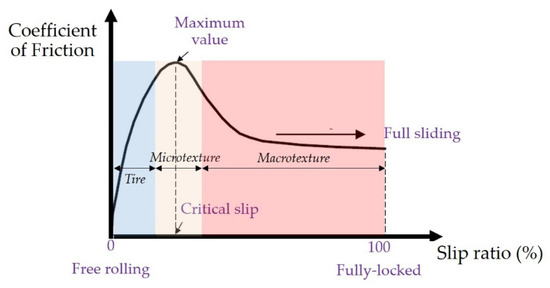
Figure 3.
Friction versus tire slip (adapted from [33]).
Although the graph in Figure 3 is not to scale, it is known that the difference between the peak and sliding coefficients of friction can be as high as more than 50% of the sliding coefficient. The difference is more pronounced on wet pavements than dry pavements [10]. Nevertheless, the evolution trend of road friction has grounded the basis for the development of the most common active safety system, namely ABS. This technology takes advantage of the front side of peak friction and minimizes the loss of side/steering friction due to sliding action [33]. Driving a vehicle equipped with ABS implies that brakes are applied on and off repeatedly (i.e., brake pumping) in order to control slip and maintain it around its peak. Actually, depending on manufacturing conditions, braking is turned off before the peak is reached and turned on again at a certain slip ratio, lower than the peak one [33].
In terms of friction contributors, enough documentation exists describing the factors affecting the skid resistance of a pavement’s surface [15,37,38]. The main factors affecting skid resistance include aggregate type, mix composition, on-site compaction, surface texture, traffic volume, vehicle speed, etc. [39]. Beyond the pavement surface characteristics, other factors from a vehicle’s perspective affect the developed friction, including tire characteristics, vehicle’s user operation and driving behavior. Tire characteristics include tread and groove design, rubber composition, tire inflation pressure and condition, the load distributed through the vehicle tires and vehicle operating conditions (i.e., free rolling or braking). Finally, environmental conditions, including dry versus wet surfaces with or without contaminants (e.g., dust, oil, etc.) are also known to drastically affect and vary the provided level of tire–road friction even within short time intervals [40].
2.2. Friction and Pavement Texture Components
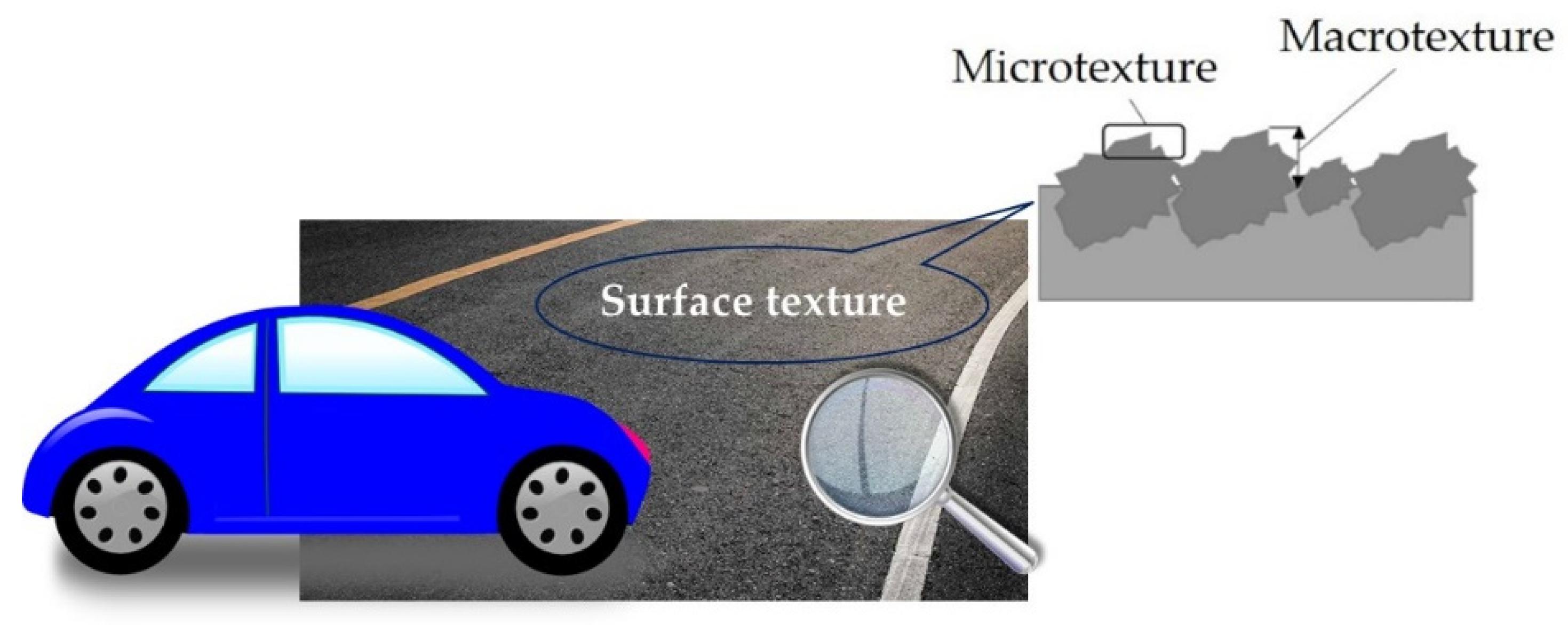
From an infrastructure perspective, pavement surface texture is also known to be a rather critical contributor of tire–pavement friction. Two basic texture components are known to affect friction development, namely macrotexture and microtexture, according to the illustrated patterns in Figure 4. They are both interrelated to the properties of the materials used for the construction of the pavement’s surface course [41,42]. Macrotexture is mainly affected by the aggregate gradation in the asphalt mix, air void content and binder properties, while microtexture depends on the contact asperities of aggregates (i.e., aggregate mineralogy) and their shape [43]. Movement at low speeds can be mainly explained by microtexture, while movement at high speeds is mostly affected by macrotexture [36]. No matter the speed, both texture components contribute toward friction development through the mechanisms of hysteresis and adhesion [44], which are illustratively shown in Figure 5.
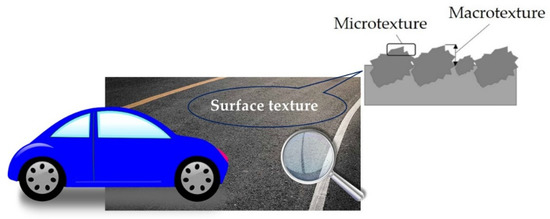
Figure 4.
Illustration of pavement texture components.
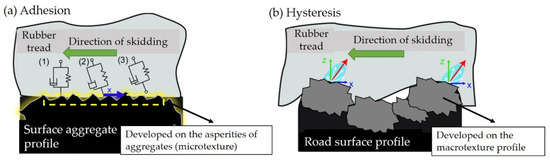
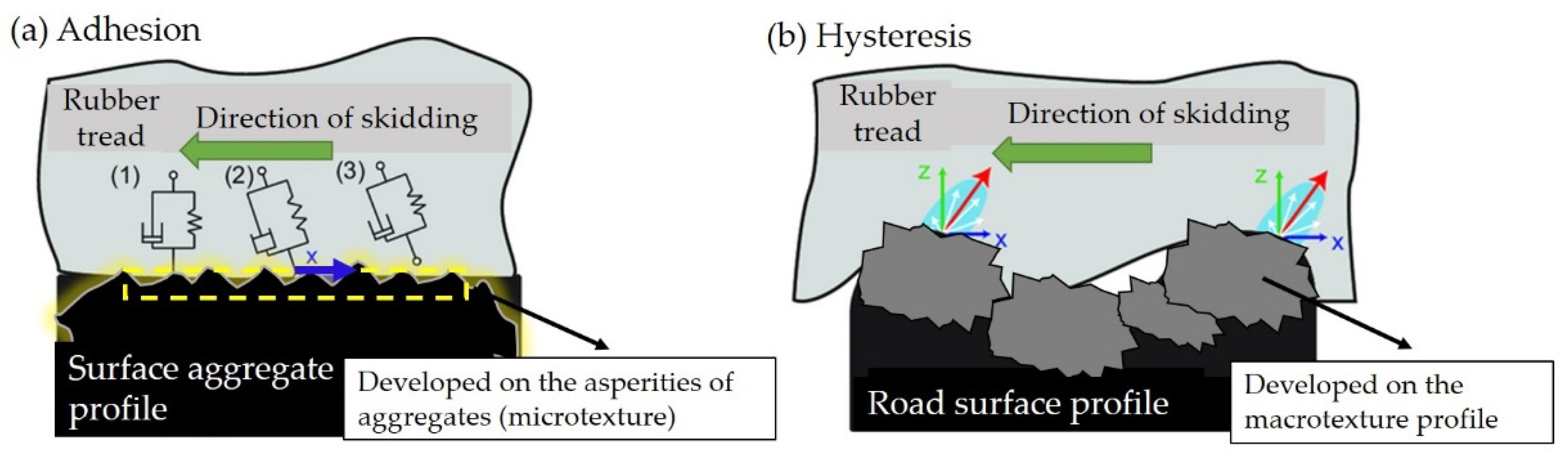
Figure 5.
Illustration of (a) adhesion mechanism and (b) hysteresis mechanism (adapted from [45]).
The mechanism of adhesion corresponds to the grip between the rubber and the road surface asperities as a result of the Van der Waals bonding phenomena [46]. The rubber’s molecular chains continually stretch and/or break, considering its viscous origin. It has been mentioned that the adhesion mechanism can occur in a range of stress frequencies ranging from 106 to 109 Hz, and the separation distance between the road and the rubber is required to be lower than 6–10 mm [47]. The adhesion mechanism is expected to consist of three individual steps (Figure 5a). At first, bonding is developed between tire rubber and road surface asperities. Afterward, the molecular bonds are stretched due to the movement of the tire, and at this stage, a friction force is generated to oppose the tire from skidding. Finally, the developed bonds break, followed by the development of new ones in a consecutive way. Hence, it can be summarized that adhesion is developed due to the small-scale molecular bonds between the tire tread and the pavement surface [48,49] and represents the shear force that is generated when a rubber tread successively reforms its shape to conform to the shape of the road surface asperities [41]. As such, aggregate microtexture is the main surface characteristic that affects the developed adhesion.
The road macrotexture induces a high-frequency excitation on the rubber tread with the normal frequencies ranging from 102 to 106 Hz [47]. Hysteresis is developed due to the continuous compression-relaxation phases of the rubber tread while it is in contact with the surface aggregates of the pavement. As the rubber forms its inherent hysteresis, it cannot return immediately to its initial condition, and thus, it exhibits an asymmetrical movement (Figure 5b), which is subsequently transformed into energy loss in the form of heat [33,41]. Such an asymmetrical movement of the rubber around the pavement’s macrotexture results in the generation of frictional force with a tangential component opposing the skidding, which is considered the tire force [47]. Consequently, hysteresis is affected by the overall profile of the surface aggregates, indicating that macrotexture mainly governs the hysteresis mechanism.
From a driver’s perspective, hysteresis and adhesion components can be critical when a vehicle starts braking or in the case of moving at low speeds. Noticeably, adhesion is dominant in the case of a dry and smooth road surface. This happens due to the asperities of the surface aggregates that come in contact with the rubber and contribute to the generation of friction, thus helping a vehicle to immobilize [41]. On the other hand, in case the surface is wet, hysteresis dominates. The aggregates’ profile, i.e., the pavement macrotexture that defines the level of hysteresis, is critical for the acceleration of the water drainage from the interface between the rubber and the road in order to prevent the vehicle tire from hydroplaning [35]. However, the case is very different for vehicles that move at high speeds since neither adhesion nor hysteresis loss can effectively contribute to friction. This happens because the asperities of the aggregates (microtexture) and the profile of the aggregates (macrotexture) cannot be in full contact with the rubber.
2.3. Weather Effects on Tire–Road Friction
Skid resistance does not remain constant over time. It can substantially vary on a year-to-year basis because of the traffic polishing effect [40], while it is also subject to seasonal variations within a year due to the weather changes [10,50,51]. Among the environmental factors related to seasonal conditions in a roadway environment, rainfall, condensation, snow, ice and temperature are most commonly considered [52]. The presence of contamination on the pavement surface in the form of dust, oil, rubber buildup or other contaminants also plays a crucial role since a contaminated surface adversely affects the vehicles’ braking efficiency [33].
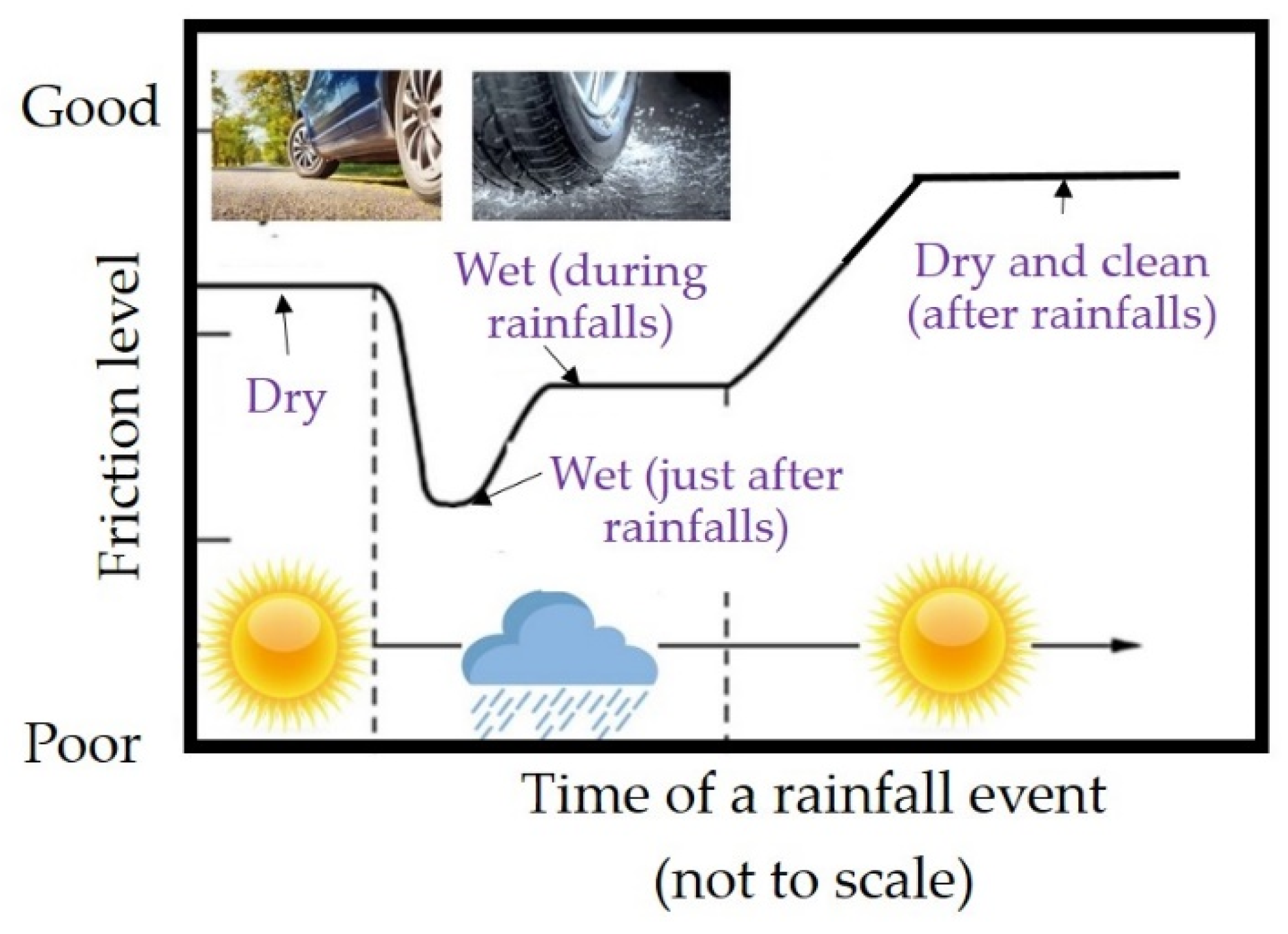
The seasonal variation of skid resistance can be illustratively explained in Figure 6. In general, a pavement’s surface exhibits different friction levels during wet and dry seasons. In particular, during dry seasons, after a prolonged period without rainfall events, tire–road friction is lower due to surface contaminants—debris (fine dust, clay, loose gravel, rubber, vehicle oil, etc.) that are deposited on the road surface and come in contact with the tires’ external grooves [41]. In case of a rainfall event on a contaminated surface, tire–road friction is expected to reduce even further. Intense rainfalls can be followed by a progressive increase in the provided friction levels because contaminants are washed and cleaned from the road surface. As such, in wet periods (i.e., at periods with frequent rainfall events), a dry and clean surface is expected to perform even better in terms of the provided tire–road friction. Loose debris is nearly absent due to rainfalls and traffic effects that both act against the buildup of fine dust. In that case, a pavement’s surface becomes rougher under the movement of vehicle tires, resulting in higher friction levels [53,54].
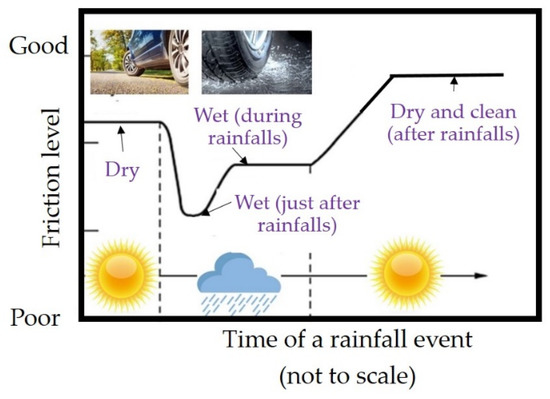
Figure 6.
Friction level variations of a pavement surface subject to weather changes (adapted from [55]).
Temperature is enlisted as another factor affecting friction [51]. Typically, friction is reduced when temperature increases because the rubber, as a viscoelastic material, becomes softer [51,56]. However, modern rubber compounds are formulated in such a way that the effect of temperature in friction under normal speeds and temperatures is eliminated. Nevertheless, the influence of temperature on the friction level is listed as an open topic undergoing ongoing investigation [57].
2.4. Monitoring Systems and Measurement Practices
Based on the affecting factors, it can be understood that the tire–road friction is a multi-parametric characteristic, which plays a crucial role during pavement monitoring and management given its relationship to the provided driving safety. This is the reason behind the need for continuous monitoring of the provided friction levels along the road networks of many countries. Highway agencies first strive to define investigatory friction levels, i.e., critical values that should alert them for additional and more ad-hoc investigations at subsections where an increased incident-potential occurs. Second, systematic efforts are undertaken in order to accurately define intervention friction levels, i.e., values below which the skid resistance level is unsatisfactory and proper restoration actions are required. Therefore, the need for accurate friction measurements within a PMS is imperative. As a standard practice, most agencies perform skid resistance measurements at least once per year, or even frequently at multiple time periods (i.e., in dry or wet seasons) in order to capture the seasonal variation effect.
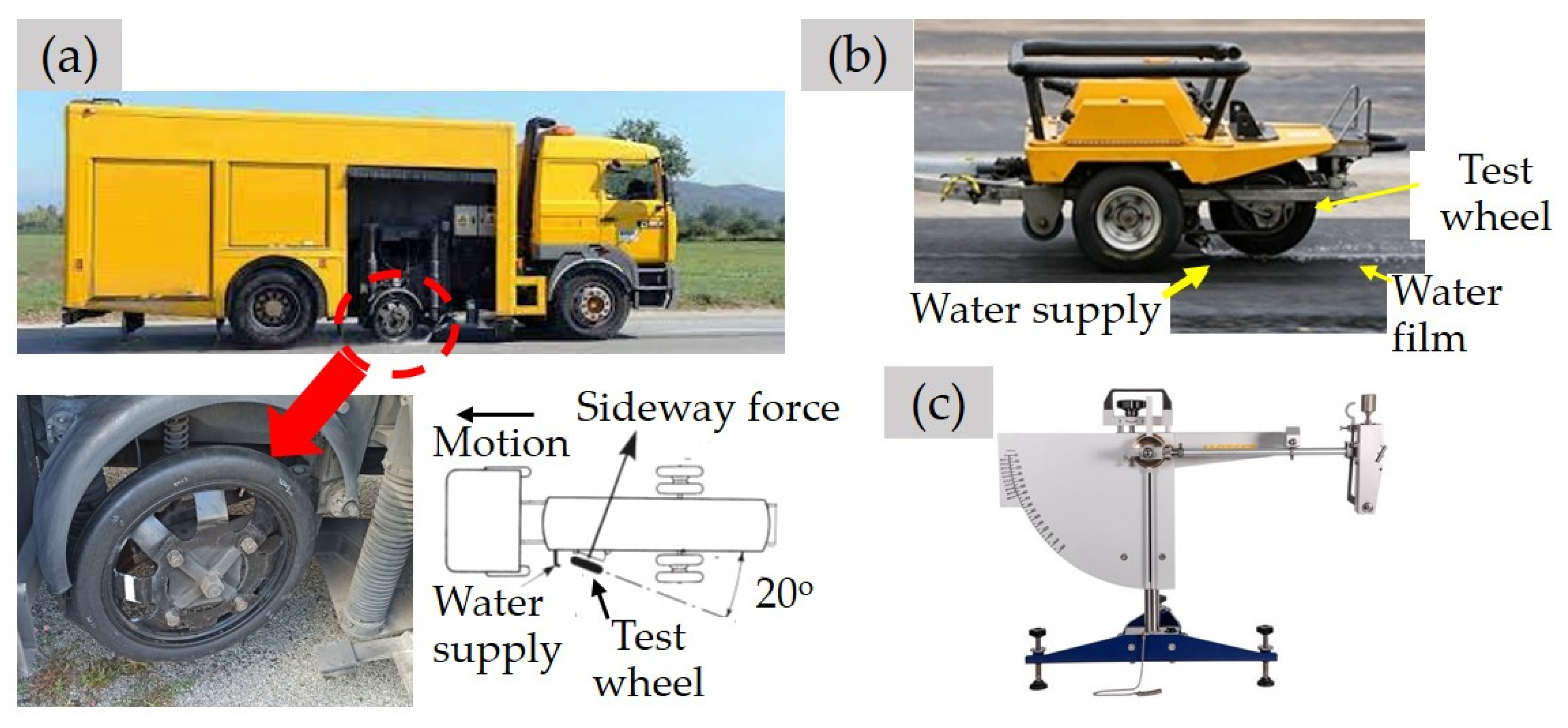
However, there are many different friction measuring devices used worldwide. The most commonly used systems (Figure 7) are enlisted below, and their different measuring principles are briefly given. These are (a) the SCRIM system (Sideway-force Coefficient Routine Investigation Machine), (b) the GripTester system and (c) the British Pendulum Tester (BPT). More details about other friction measuring systems can be found elsewhere [15,37].
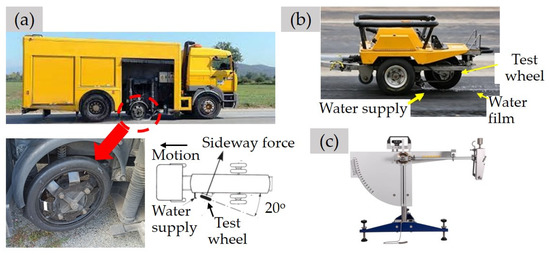
Figure 7.
Typical systems for skid resistance measurements: (a) SCRIM system, (b) GripTester system (trailer-towed) and (c) a portable BPT system.
SCRIM (Figure 7a) is utilized to provide continuous measurements of side-force friction. More specifically, it measures the pavement’s side friction or cornering force perpendicular to the direction of travel of one or two skewed tires. Water is placed on the pavement surface (1.2 lt/min) and one or two skewed, free rotating wheels are pulled over the surface (typically at 64 km/h). Side force, tire load, distance, and vehicle speed are recorded. Data are typically collected every 25 to 125 mm and averaged over 1 m intervals.
The GripTester device (Figure 7b) is utilized to provide continuous friction measurements as well. It consists of a three-wheeled system, including a standardized wheel with smooth-tread tire that is utilized for measurement purposes. The axle of the test wheel is connected to a chain-system that controls and fixes the wheel’s slip at a constant rate of 14% (rolling wheel). GripTester produces a water flow of 0.5 mm water-film depth, and measurements are taken at a constant speed of around 50 km/h. These circumstances allow GripTester to continuously measure a wet pavement surface producing the dimensionless friction measurement that is referred to as Grip Number (GN). The produced output can be averaged at predefined intervals (i.e., weighted values for 5 or 10 m intervals).
The BPT system (Figure 7c) is a portable friction device developed in the 1960s in the United Kingdom. BPT is a static device and needs to be set up at a specific test location on a road surface. Its use is standardized according to [58]. A smooth rubber slider mounted on the pendulum arm is released from the horizontal position. The slider reaches a certain speed (~10 km/h, by gravity) when the rubber touches the road surface. The post-contact pendulum swing height (or angle) is determined by how much the slider kinetic energy is dissipated during the contact (e.g., the pendulum will swing higher from a more slippery surface). By measuring this post-contact swing height (or angle), the coefficient of friction named British Pendulum Number (BPN) is derived [59]. A low angle corresponds to a higher BPN measurement (more kinetic energy is dissipated) as the pendulum arm passes from the higher BPN values and moves to the lower ones for a smooth surface. A zero BPN value corresponds to a totally smooth surface, while 150 BPN is the upper limit representing practically an abnormal rough surface.
2.5. Discussion
Overall, different systems are expected to provide different friction indexes because of the variable measuring principles. There have been attempts to develop a harmonized friction value (aiming to be non-device specific), such as the International Friction Index (IFI) developed by the PIARC World Road Association. Reviews of those efforts [60,61,62] generally agreed that harmonizing the output of a large number of different devices is a formidable task and may not be achievable (due to a large number of factors and the associated complex interactions). An alternative (and more practical) approach for routine practice would be the standardization of the type of devices used for network measurements, and a lot of effort has been devoted to that [63].
Finally, it is quite common within many studies to make indirect estimations of tire–road friction based on road profile indications and, in particular, texture measurements [64,65]. Texture data are collected from laser profilers that collect other data as well, such as roughness and rutting, making this approach rather attractive since multiple types of information can be collected with a single system. However, the validity of such approaches is still under discussion since most of them have been developed on scaling laboratory data and extrapolating predicted results to field performance [66,67]. Therefore, erroneous estimations of the available friction levels in the field can be made. In addition, it has been proved that the relationship between friction and texture exhibits a variable trend depending on the traffic volume that a pavement has been exposed to, making any kind of modeling a difficult task. Based on long-term traffic data, it has been observed that macrotexture and friction exhibited a slow decrease with fluctuations during their initial evolution period (i.e., until a certain amount of cumulative traffic) [10]. At later stages of a pavement’s lifespan (i.e., after a certain amount of cumulative traffic), macrotexture exhibits an inverse trend with friction; as the former increases, the latter decreases [10].
Such findings highlight the need for systematic friction measurements for both new and in-service pavements with specialized equipment. Lack of correlation between macrotexture and frictional performance of a roadway, especially during the first years of its operation [10], should stimulate highway agencies and roadway operators to include distinct friction measurements at periodical time-intervals. In fact, the initiation of such measurements immediately after the construction or reconstruction of a roadway is a necessary action in order to maintain a track record (i.e., database) of the road, which will be useful for the maintenance management during its lifespan and the enhancement of pavement sustainability. Nevertheless, searching for other alternatives and promising ways to estimate friction levels (such as through laser systems or other innovative sensing systems, e.g., smart tires) is continuously revived through popular research initiatives given the strong social and economic impact factor of road safety.
3. Smart Tire as a Tool for Sensor-Based Monitoring
Towards this, smart tires appear as a sensor-based monitoring tool developed to act, among others, for the provision of real-time information related to the tire–road friction. In addition, the need for a radical update into intelligent tires makes sense so that they can adapt to the available friction levels in order to assist drivers in controlling vehicles under various weather and road surface conditions. Recall that reducing road crashes by improving road infrastructure characteristics is a rational approach considering that road surface condition needs to be maintained at a sufficient level while being consistently monitored. However, the need to provide real-time information on road surface characteristics seems to be a challenge for the technology of tire sensors in terms of data collection and interpretation.
Tire sensors act as integrated dynamic controllers, operated to provide information on vehicle states [68]. State estimators provide data, including, among others, the sideslip angle and vehicle speed. According to [69], the accurate calculation of those variables can give essential information on a vehicle’s condition for various driving scenarios, including a quasi-steady vehicle state and transient operation, as well as concurrent longitudinal and lateral accelerations. All these aspects are eventually connected to the provided friction, which is a crucial driving safety factor [69].
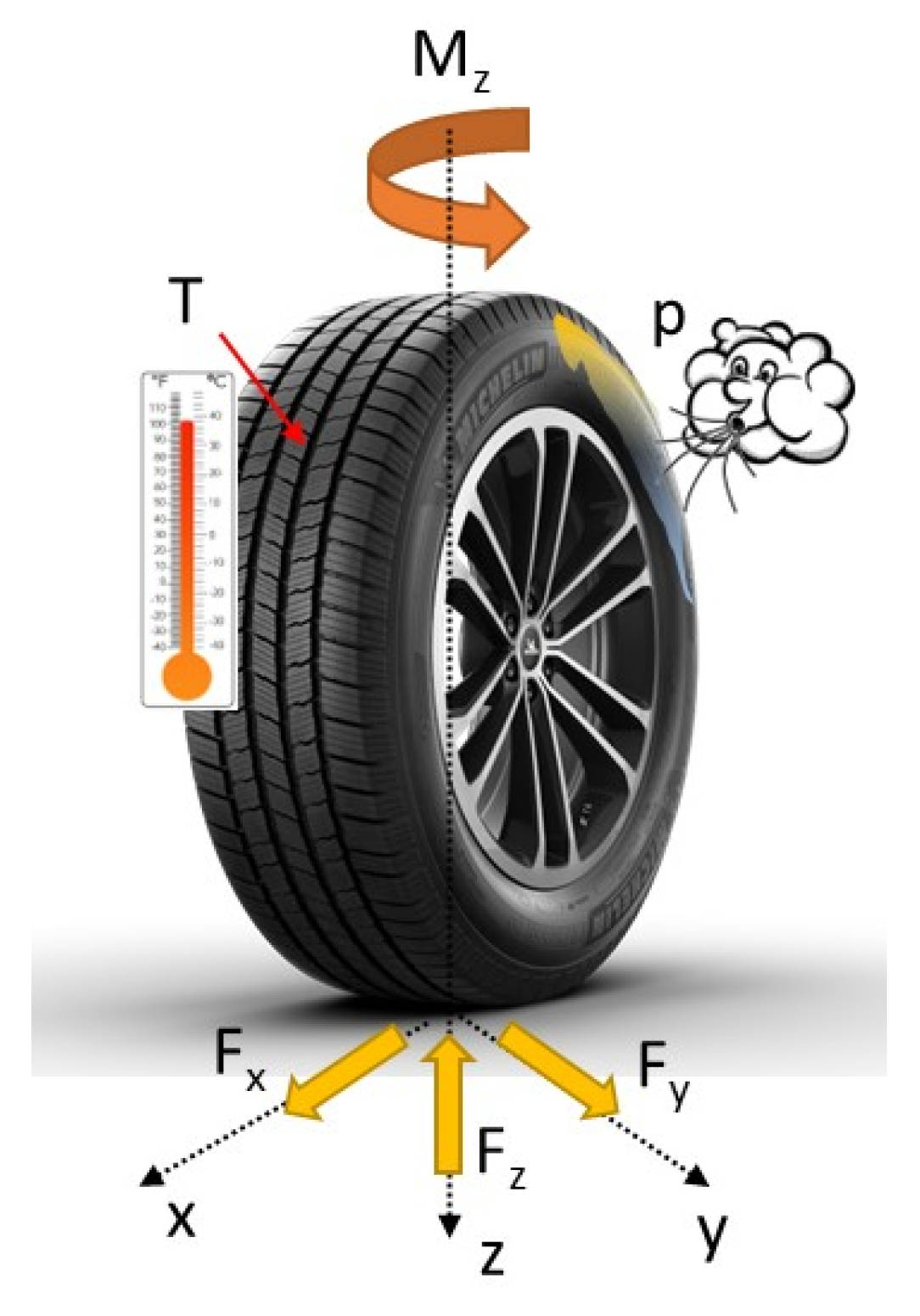
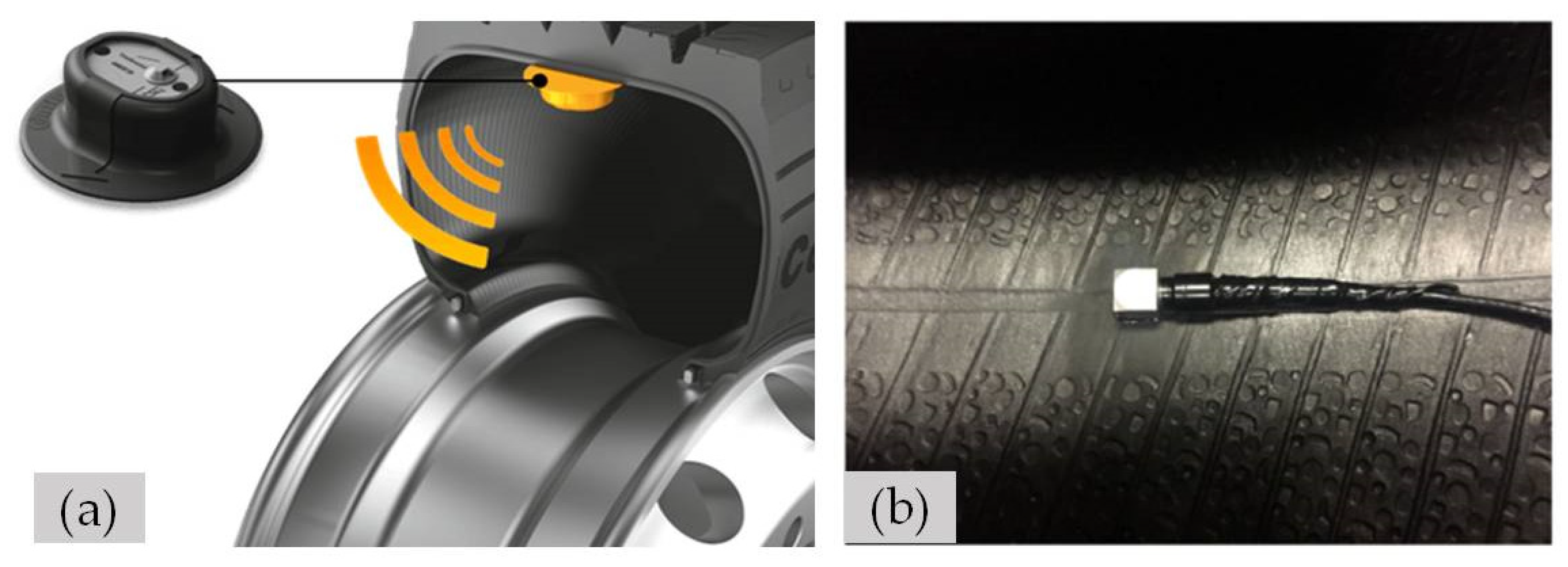
Considering that tire sensors can act as a monitoring and real estimator tools, it appears that an appropriate combination of information on their own state might be very determinant for the estimation of tire–road friction [24,28,29,70]. Related information may include tire temperature, air inflation pressure, tire forces and other characteristics [24,70]. Basically, the measured characteristics that can be useful to a vehicle safety control system wishing to measure tire forces in real–time include, according to [70], tire longitudinal force (Fx), tire lateral force (Fy), tire vertical force (Fz), tire–road friction coefficient (μ), tire aligning moment (Mz), tire air inflation pressure (p), and temperature in tire’s body (T). These components are illustrated in Figure 8. Depending on the measurement type, sensors can usually be attached to the inner part of a tire (Figure 9a) or along the tire tread (Figure 9b).
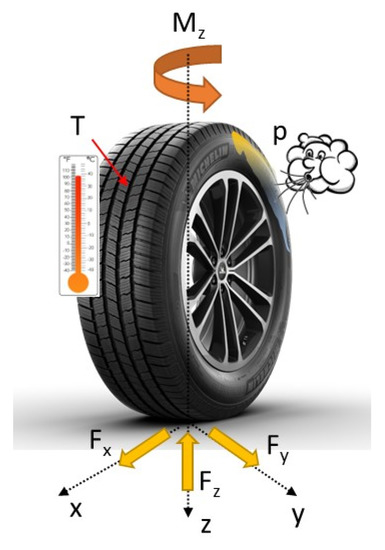
Figure 8.
Measured quantities.
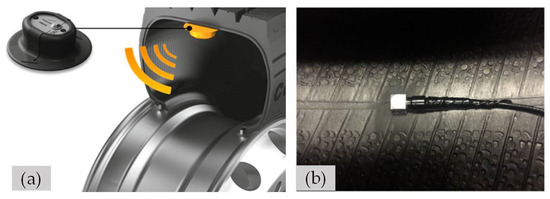
Figure 9.
Typical examples of (a) adhesive tire sensors and (b) adhesive tread sensors (tri-axial accelerometer).
Regarding the air inflation pressure that is listed as an important characteristic, this is mainly because it significantly affects the driving performance, and this is why many vehicle manufacturers have added tire pressure information as a basic feature in modern cars [24]. In addition, tire air pressure is also a matter of concern for the damage induced into the pavement infrastructure and many relevant studies are devoted to an accurate determination of tire contact stresses [71,72]. Nowadays, in many countries, information on tire pressure systems is mandatory in passenger cars and trucks, while in some countries, information on truck tires constitutes a homologation requirement. Similar interest exists for the tire temperature as well, mainly due to the fact that temperature affects the tire’s viscosity, which plays a crucial role in the developed tire friction [70], also considering those issues mentioned in Section 2.3.
However, apart from the inflation pressure and temperature, the other characteristics cannot be directly measured while vehicles are in motion. This can be feasible only with the incorporation of indirect measurement and estimator systems (e.g., tire sensors) that can be implemented by qualified technical staff. Once properly designed and installed, a multitude of information can be obtained, such as:
- Tire radial displacement, which can be measured between the wheel and the inner liner of the tire, and displacement of the tire sidewall. Regarding the measuring devices, it has been reported that they can vary from some simple string potentiometer devices [73] to optical systems using a light source and a lens [74]. The majority of such devices are reasonably efficient, but their durability is a matter of concern [70].
- Tire acceleration can be easily measured considering the various accelerometers that are widely available, quite efficient and physically strong. However, in-tire accelerometers measure impacts, and thus, they are suitable for establishing the tire angular position, especially with respect to identification of the tire–road contact. There are also those tire sensors that directly measure the acceleration or deformation of the tire once installed inside the tire [75,76]. In general, although it may be possible to relate tire–road contact patch location and length to tire forces, it is more likely to generate information about forces when considering tire strain measurements directly [70].
- Tire strain is affected by the stiffness of the measuring sensors and their adhesive, which is normally much higher than the stiffness of tire rubber. In order to overcome this incompatibility, the utilized sensors are elastomer substrates [77,78,79]. Wheel angular velocity and position can be measured using the rotary wheel encoder, which is part of an ABS system. In addition, the angular position can be estimated using the ABS information and information on tire acceleration and critical friction.
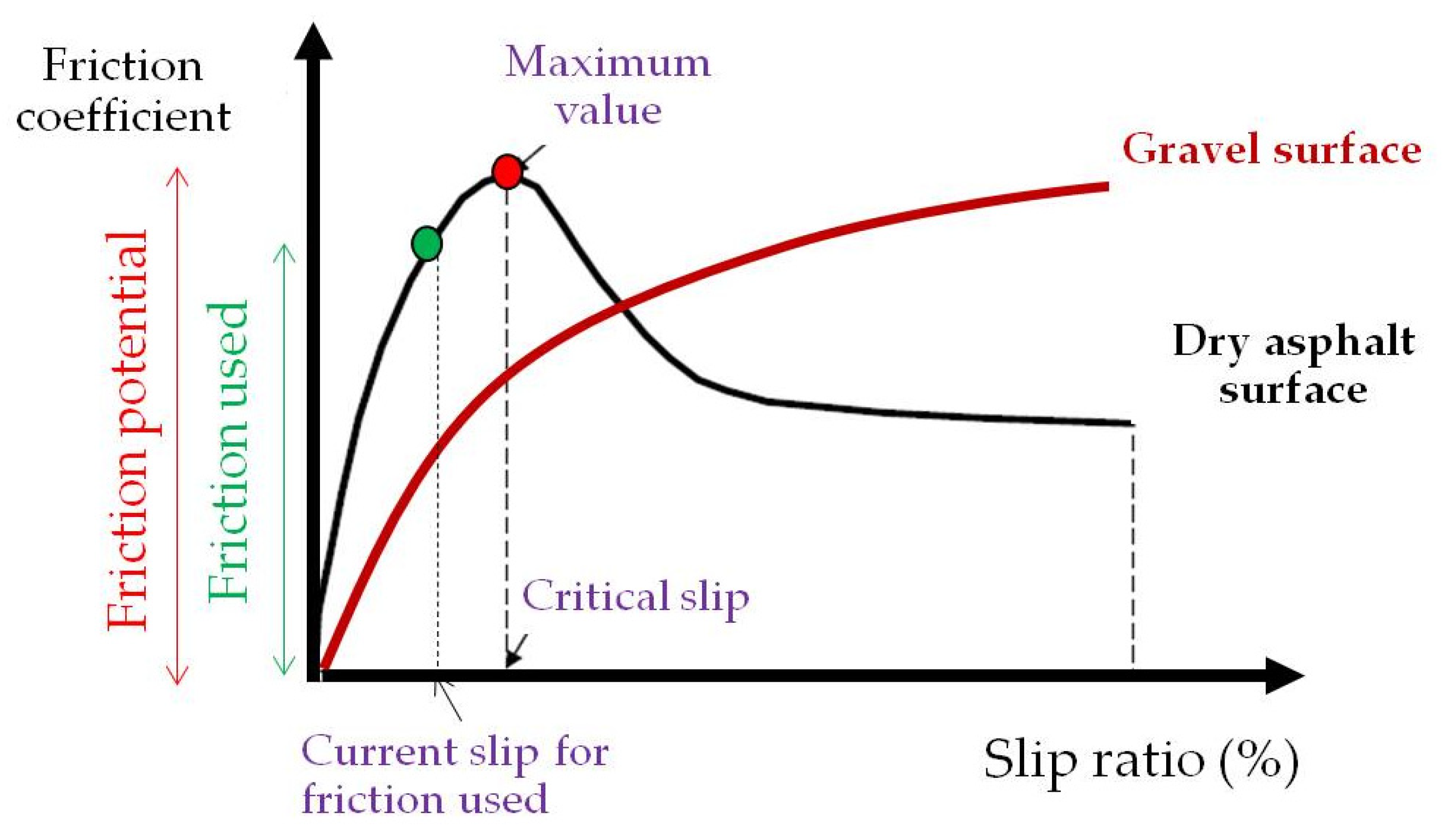
Noticeably, the achieved angular velocity also relates to the critical friction coefficient (i.e., maximum friction value) that can be developed based on the road surface characteristics (recall Figure 3 and Figure 10). The lateral or longitudinal slip value at which μmax is located varies significantly with the road characteristics and the tire tread. As a reference, low values are seen on competition tires (high longitudinal and lateral tire stiffness), and high values are obtained on loose surfaces (e.g., deep snow, gravel). Combining this information and the acceleration (specifically deceleration during braking), it is possible to estimate the angular position and obtain useful information about friction. A summary of analysis methods and experimental models used to generate friction parameters is shown in Table 1, together with a brief summary of each invention.
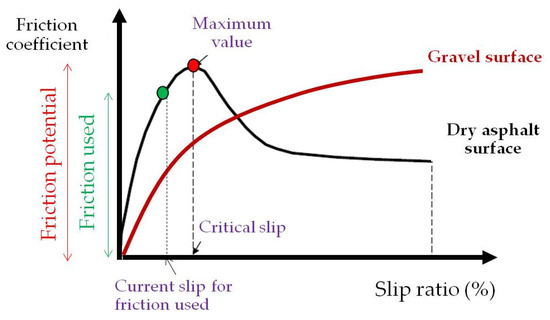
Figure 10.
Friction versus longitudinal slip for differently paved surfaces (adapted from [45]).

Table 1.
Experimental-based methods to estimate friction parameters (adapted from [1]).
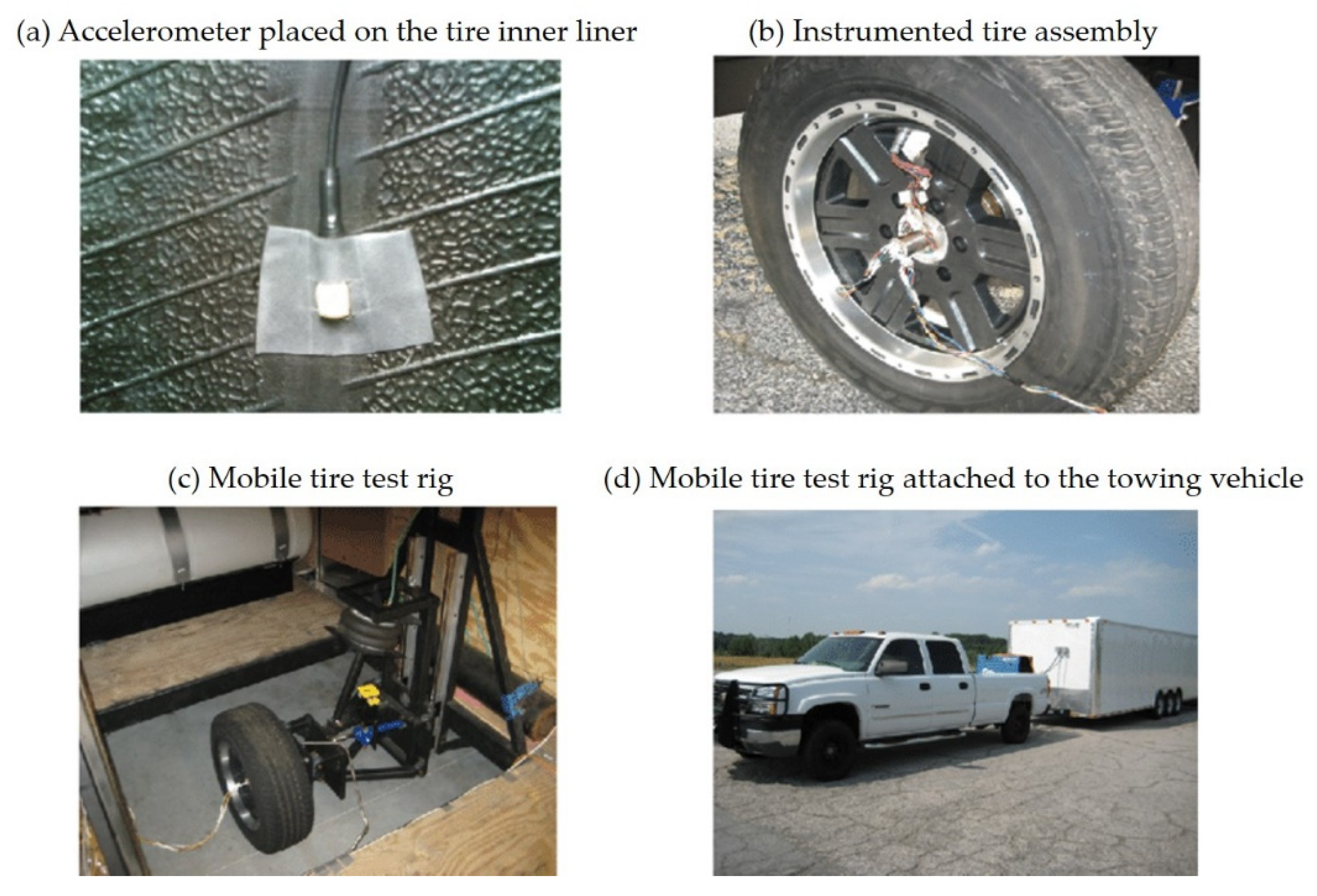
As previously mentioned, various types of sensors have been developed to directly measure the acceleration or deformation. Some studies use sensors to investigate intelligent tires that can estimate characteristic features of road conditions using the waveforms of acceleration sensor signals for different types of road surfaces through experimental data [32,86]. For instance, Singh et al. [87] developed a sensor system that measures the frequency response of the vibrations while moving (Figure 11). The level of the vibrations, which is within a predetermined frequency band, may then be used to calculate the frequency spectrum of the time signal through a band-pass filter. According to this approach, it is possible to have an estimation of the road surface profile. Hence, this approach can be subsequently used to estimate the provided tire–road friction coefficient, especially when very low levels are indicated based on the surface profile.
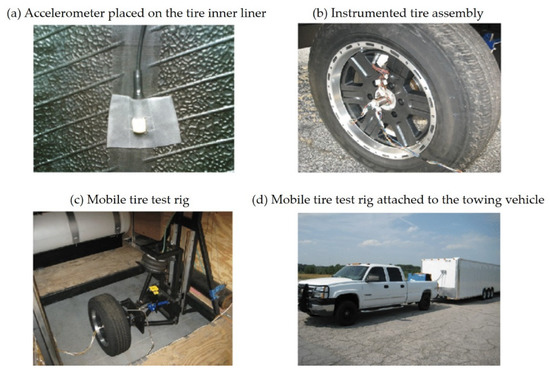
Figure 11.
Full-scale application of a smart tire system and its components [87].
Regarding the limitations of the method, for high slip conditions when high force is needed, increased vibration is recorded due to the stick/slip phenomenon linked to the tread block vibration modes, thus making the proposed method inefficient. In that case, a model-based approach for the estimation of tire friction is proposed. All in all, the authors proposed a combined approach to estimate the friction levels using both measurements and model-based estimators for a wider range of excitations [87].
Another approach based on vibration has been analyzed in the study of [88], which presented a monitoring method to estimate the coefficient of friction by using the tire rotational vibration. They used a simple tire rotational model and derived a transfer function relating the road disturbances and the wheel speed responses. Acosta et al. [45] reviewed various study approaches that are not only vibration-based, but are also considered slip-based approaches focusing on longitudinal dynamics, lateral dynamics, and tire self-alignment moment. Since the purpose of this review paper is not to evaluate or compare the available different approaches, readers are referred to [45] for further relevant information.
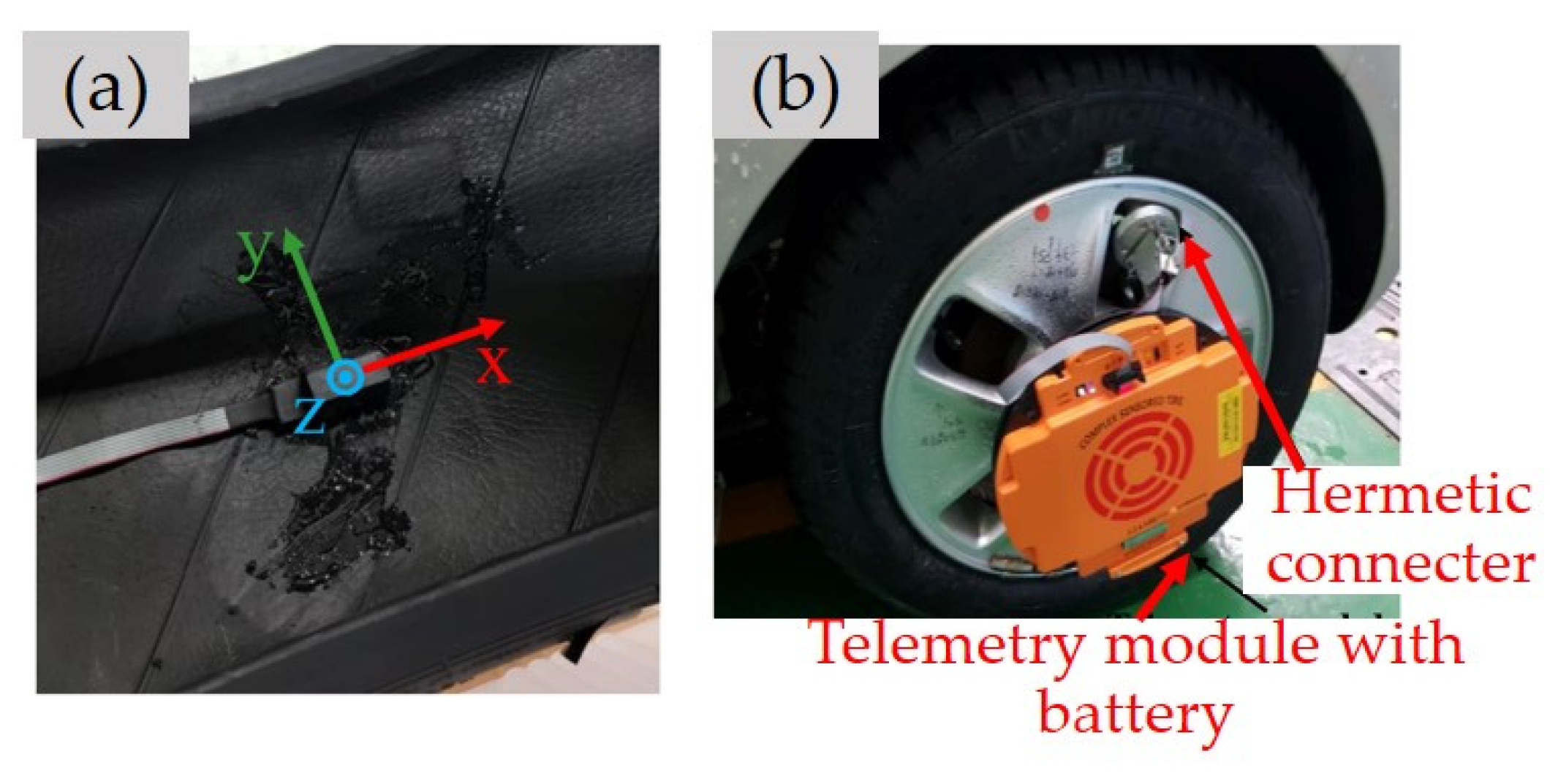
Apart from those studies focusing mainly on experimental data, there are limited ones using algorithms that can classify road surface types from sensor signals in real-time. In particular, Lee et al. [86] developed an algorithm that estimates road surface type in real-time by using a Deep Neural Network (DNN) based on signals from an intelligent tire system with an accelerometer attached inside the tires (Figure 12). The authors presented an intelligent tire system with a three-axis accelerometer to measure the response to the tire–road surface interaction during the contact period under various road conditions. The sensor is attached inside the tire using an adhesive material (Figure 12a). The hermetically electric connecter sends the signals and receives power between the sensor and the telemetry device that is attached outside of the tire (Figure 12b). The telemetry transmits the signal from the sensor at a rate of 1 kHz using Bluetooth wireless communication to the data acquisition system.
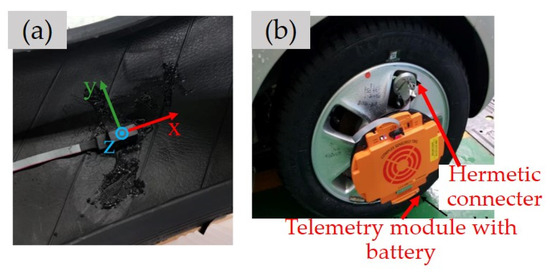
Figure 12.
Example of an intelligent tire system setup and its installation parts: (a) accelerometer and (b) additional equipment components [86].
No matter the complexity of the system developed, a common aspect is how the collected data are interpreted. An innovative process to design a Fully Connected Neural Network (FCNN) and a one-dimensional Convolutional Neural Network (CNN) was developed [86]. The concept of FCNN is that a typical structure of an artificial neural network consists of fully connected layers, such that one layer’s node is linked to the next layer’s node. The link is successful once good communication is ensured between the internal parameters of the structure and the produced output data. A CNN is a peculiar type of Deep Neural Network (DNN) architecture used to train spectral variations and model spectral correlations, commonly applied to learning images [86,89]. A typical CNN consists of three consecutive layers:
- A convolutional layer, responsible for extracting the spatial features from the imported images inside the layer so that the CNN can identify the patterns or objects,
- A pooling layer, responsible for gathering the output data generated from the convolution layer in order to reduce the size of the output data or to highlight specific sorts of data [86], and
- A fully connected layer, which is flattened and connected to the pooling layer once all the features of the image or sequential data are sufficiently recognized, thereby leading to the final classification output.
Based on the developed methodology, it became feasible to form a database containing tire–road interaction information in contact patches regarding various road surfaces. This database was used for training purposes of the two aforementioned types of algorithms in order to classify the road surface conditions. It was concluded that a one-dimensional CNN was more suitable than a FCNN [86]. The proposed algorithm was considered more practical because it can continuously provide road surface indications and be effectively incorporated into the chassis controller of a vehicle. It seems that if this approach is combined with additional information such as tire type, tire pressure, vehicle load—which is a key technological issue for both the automotive sector [90] and the damage induced into infrastructure as well [91]—then it can help vehicle manufacturers assist with driving conditions.
4. Potentialities of Smart Tires: Challenges and Prospects
4.1. State of Practice
Smart tires have been introduced in both research and industry communities as innovative sensing systems capable of numerous dynamic features, including estimation of wheel forces, slippage in contact, tire–road contact area on dry and wet roads, and hydroplaning potential [92]. Of course, installing smart sensors in a tire encompasses several problems that have to be considered, such as compatibility of the sensors with tire rubber, battery installments, and effectiveness of wireless transmission and data interpretation [93]. In the previous years, research has systematically dealt with such issues in order to address limitations and weaknesses and transform them into strengths and opportunities for an advanced vehicle control integrated with an intelligent tire system. Areas of benefit include tire performance analysis [92], limited uncertainties in tire modeling aspects and most importantly, improved driving behavior and enhanced road safety.
Nevertheless, sparse research initiatives are not enough to ensure efficient transfer in a “smart” mobility future. Cooperation between academia and industry needs to be strengthened through joint research initiatives, including simulation studies and pilot demonstration examples, in order to prove the increased capabilities of the smart tire features, propose recommendations and set integrated procedures based on past and current experience. Fostering collaboration between researchers and practitioners can bring us in front of pilot implementation projects that constitute a promising starting point for developing mature and scalable future concepts based on “lessons learned” experience.
Thus far, leaders in the tire industry (e.g., [94,95,96], etc.) have already tried to develop a technology that will be market ready in due course to provide not only assistance to drivers but also efficiency in connectivity and data storage. Connectivity is a key factor when developing sensors embedded in tires since machines instead of humans are expected to monitor and adjust driving conditions. When developing smart tires, manufacturers focus on increasing capabilities for adaptation to road characteristics and prevention of collisions or crashes. An example of a high-speed car equipped with smart tires developed by [95] is the latest McLaren Artura sports car. Tire sensors transmit readings to this luxury vehicle, and some of the data are used to enhance driver alert systems.
In addition, since tire sensors come in direct proximity to the pavement, they are supposed to provide valuable data to a higher extent than today’s industry-standard tire-pressure monitoring systems. Such systems are mounted on air valves provided with tire pressure readings [97] and have been adopted by major tire manufacturers (e.g., [30]). Similar technology has also been adopted for measuring strains on tires [96] for a better tire performance analysis. However, tire connectivity goes some further steps ahead.
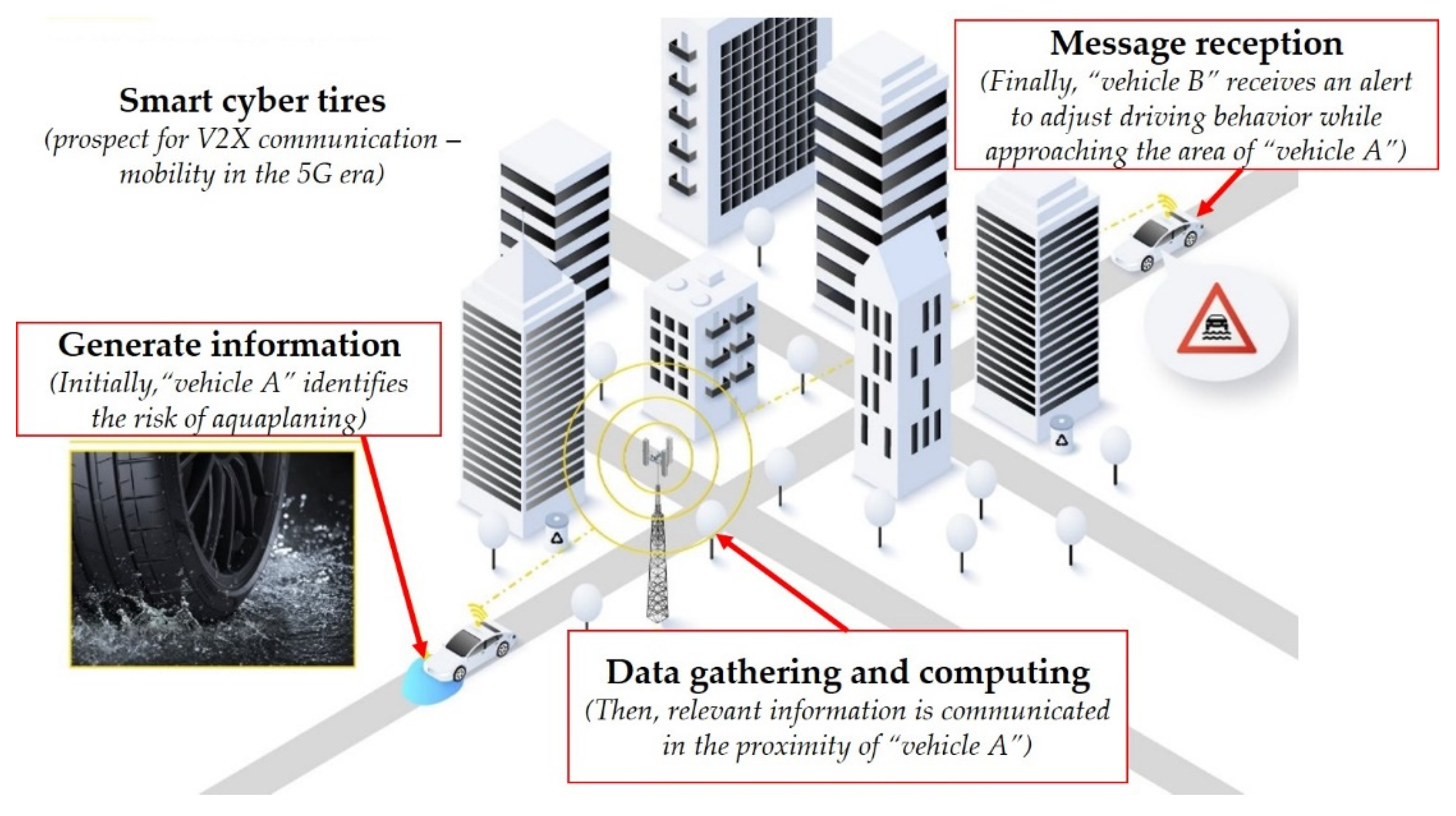
When addressing the term “connectivity”, smart tires are expected to extend their capabilities beyond the scope of individual vehicle control. Tire manufacturers may invest in adding connectivity simply because they need data to improve their products, as does the vehicle industry. This is achievable by making a host of ideas to kick off a future where rubber tires will do more than roll down the road surface. Two illustrative examples are given in Figure 13 and Figure 14 for smart vehicle movement in both urban and interurban road environments. Aspects of a V2X (“vehicle to everything”) communication are introduced in these two figures, thereby providing a strong potential and a key enabler for automated yet safe driving and overall intelligent mobility.
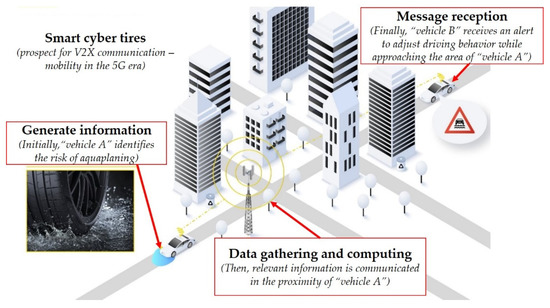
Figure 13.
The concept of cyber smart tires (adapted by [95]), case of an urban road environment.
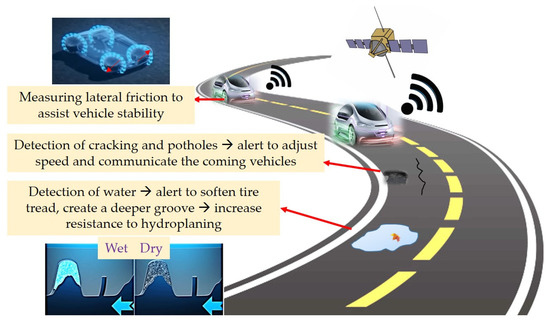
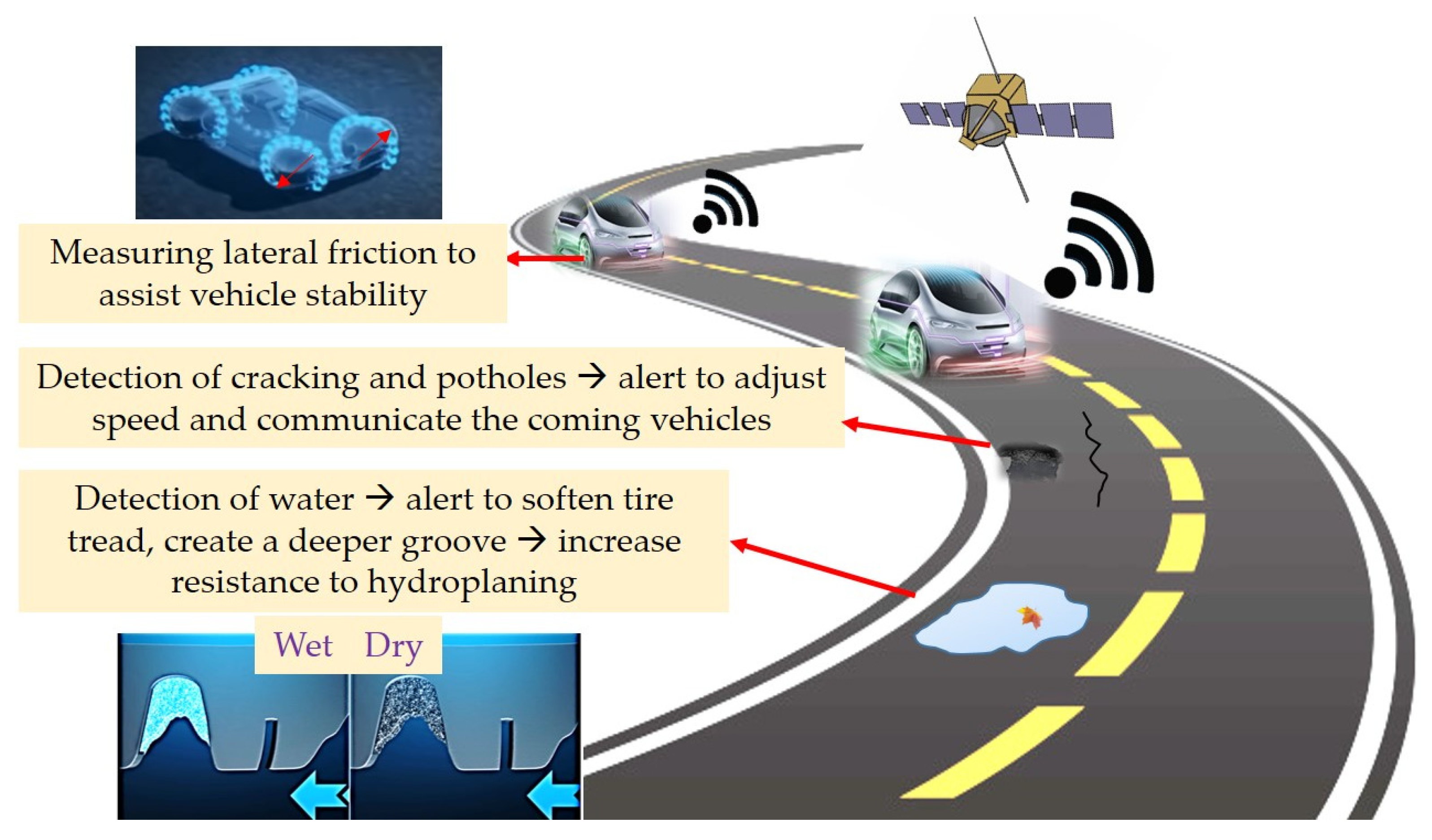
Figure 14.
Potential benefits from vehicle mobility patterns with connected tires (adapted by [98]), case of an interurban road environment.
As stated earlier, tire sensors normally monitor tire wear, inflation pressure, and the temperature inside the tire. Once an increase in the inside temperature is detected, then an indication for early tire damage might occur [99], thereby necessitating adjustments to avoid a dangerous situation in the roadway environment. Therefore, if the picked-up sensor-based information about road surface temperature, tire pressure, traction, vehicle acceleration, etc., could be transferred via a built-in telematics device into a cloud (Figure 13 and Figure 14), then properly trained algorithms could work on forecasting the likelihood of a problem occurring. Accordingly, once a vehicle approaches or passes over potholes, bumps and several types of cracking (Figure 14), tire sensors can communicate those parts of the highway section that may be of danger for other vehicles in real-time.
An even additional challenge is the combination of road surface data with changes in the weather conditions. Recall that weather variabilities drastically affect the pavement’s friction level with profoundly adverse effects on road safety. With data collected from intelligent tire sensors and a vehicle’s on-board information system, a clear picture of the prevailing driving conditions can be obtained, thereby providing solid alerts for driving adjustments accordingly [94]. For instance, Continental’s automated testing vehicle is used for conducting up to 100,000 braking tests on a variety of road surfaces each year, including dry, wet or icy conditions along a 75 m-long test track. Hence, that intelligent automated vehicle system would ideally learn how to respond to changing conditions, thereby adjusting the underlying performance parameters of the vehicle at any given time and ensuring safe performance through real-time measurements [100]. Regarding the same content, scenarios are envisaged where tires can sense changes in road surface conditions (i.e., detection of distresses) and predict hazardous driving potentials [95]. Tire intervention potential is, therefore, a critical aspect under consideration.
Possible benefits from tire connectivity are twofold covering aspects for both industrial and societal needs. First, tire manufacturers can gain access to valuable information on driving behavior, and they can use the data to improve their products. Vehicles can be perceived as futuristic features that can act as wheel-smartphones. Thereafter, improved driving conditions and road safety perspectives can be spread around the communities and human beings that can benefit from that kind of sensing innovations.
Considering these increased potentialities, it should be mentioned that some of the next-generation tire sensors already appear on the road, primarily embedded in wheels of heavy trucks responsible for freight transportation, thereby paving the way for applying them to high-end consumer vehicles too. Noticeably, there are pressures from one tire manufacturer [96] to equip all of its tires with connectivity features by 2027. In addition, connectivity is expected to be a dominant aspect of future mobility, when cars may be shared more and possibly operate without a driver. Therefore, tools that enable vehicles to be more aware of their environment will be necessary to guarantee safety.
4.2. Addressing Future Needs
Considering the latter remarks, it is worth noticing that most communities worldwide now face the challenge of moving towards the era of autonomous driving, where new mobility patterns are expected to dominate. Terms such as Autonomous Vehicles (AVs), Connected Autonomous Vehicles (CAVs) and truck platooning are becoming more and more familiar among both researchers and practitioners. The scientific community is jointly working with industry and automation technology to increase efficiency in the movement of people and goods [101]. Related experience from AV deployment brought to the forefront research investigations for changes in the road markings, lane width, roadway capacity and aspects of pavement design [34,102,103,104]. Undoubtedly, the current road infrastructure condition and rapid change in the loading patterns necessitate the introduction and adoption of new continuous monitoring of pavement performance.
In this context, road safety remains an undeniable demand. Autonomous truck implementation has been reported to negligibly affect the provided friction of asphalt pavements [34]. However, limited or even absent lateral wander of AVs results in excessive load concentration that accelerates pavement damage. Indeed, a zero-wheel wander induces rutting that can adversely affect road safety aspects, especially under wet weather conditions. Rutting acts in favor of water accumulation during rainfall, thereby limiting the direct contact between tires and the road surface. As such, an increased hydroplaning potential appears. In this sense, autonomous driving in narrow lanes can contradict the reduction in road incidents. Despite the several countermeasures already proposed in the literature (e.g., an optimal scheduling of truck loading on low-temperature days to limit rutting [34]), other more strategic actions have to be planned. The key aspect relates to connectivity and controlled channelized traffic patterns in order to reach a balance between automation and optimal pavement performance with less distresses [104] and thus higher safety.
Advanced control systems during platooning and optimization of a vehicle’s lateral position along a lane’s width may decrease pavement damage by 30–40% [104,105]. Given their features, smart tires do offer a unique opportunity to foster connectivity challenges among vehicles in the future mobility era. Similar to those mentioned earlier for defects or water detection while traveling, smart tires can indicate the need for optimization of the lateral position of each platoon or group of platoons at a highway section with increased surface defects (e.g., cracking, rutting, etc.) or reduced friction levels. Once a distressed section is detected by a preceding vehicle, reliable and real-time alerts can be communicated to a succeeding vehicle so that it can adjust its lateral position with a twofold objective; (a) to ensure a safe ride—driving perspective—and (b) to contribute less to pavement deterioration—infrastructure perspective. In this context, systematic research needs to be supported to extend the capabilities of smart tires such as the traffic regularization, highway safety increase and the potential contribution to infrastructure condition monitoring.
4.3. Integration with Current Techniques for Infrastructure Monitoring
It was revealed earlier that performing friction measurements for roadway asset management within a PMS is imperative. Diversity in the utilized systems and their measuring principles has been mentioned in Section 2.4 and Section 2.5, which has stimulated investigations to deal with the harmonization potential during the assessment of friction levels. No matter the utilized system, highway agencies that operate heavy-duty motorways plan friction measurements at specific time intervals yearly and perform the necessary decision-making so that their pavements remain serviceable and meet safety requirements. However, seasonal variations of friction and sharper fluctuations that can be observed because of the weather conditions at individual parts of a bigger road network (e.g., intense rainfalls or prolonged periods of drought that refer to dusty contamination) cannot be captured in a continuous mode because of limitations relating to the procurement and transportation logistics of standardized equipment at short sections for ad-hoc investigations at non-scheduled periods. In the meantime, for the majority of urban or secondary rural roadways, friction measurements may take place even more occasionally because of budgets or specialized equipment limitations of the owners of these roadways.
As commented earlier throughout the paper, smart sensing systems for data acquisition are very popular and cost-effective assessment tools [16,20]. Considering the potentialities of smart tires towards the rapid assessment of friction levels, a major research challenge reveals: are smart tires capable of detecting black spots in a roadway network in terms of infrastructure condition monitoring? Because of a lack of relevant experience, the stand-alone use of smart tires for frictional evaluation and the related decision-making seems impossible as it contradicts the well-established knowledge and practice from the use of standardized systems (e.g., SCRIM, GripTester, etc.). Instead, integrating existing systems (conventional) with practical, innovative ones (non-conventional) appears as a promising approach toward assisting a PMS with better and more accurate maintenance planning.
In other words, the idea of potentially adjusting smart tires on conventional commercial vehicles for the purpose of routine use can provide a portable measurement tool, easily adaptive for more frequent measurements (e.g., on a monthly basis) at areas of high risk in terms of road safety, such as sections with observed friction loss, raveling issues, or areas with road geometry restrictions (e.g., a reduced radius of curvature and/or a large longitudinal grade). Thereafter, targeted measurements with standardized equipment should be performed, even earlier than initially planned, in favor of developing a reliable action plan. In this context, a smart tire itself cannot directly support decision-making; rather, it alerts for the need for additional distinct measurements with those systems that are responsible for supporting decision-making processes.
It is believed that the multi-parametric nature of road friction, together with the diversity in the materials that can be observed in pavement surface courses (i.e., traditional, recycled, etc.), induces evaluation challenges related to comparability issues with existing systems and measurement conditions (e.g., type of vehicle and wheel, slip ratio, water flow, speed, etc.). Necessary supportive actions and research initiatives need to be taken to shed further light on these prospects and potential capabilities through small-scale laboratory simulation experiments with test wheels and tire sensors or full-scale field experiments at pilot roadway sections monitored through both standardized equipment and vehicles with intelligent tires. Such actions may pave the way for more cost-effective and sustainable road infrastructure management.
5. Conclusions and Prospects
The present study provided a review of aspects related to the tire–road friction as well as a popular and innovative way to assess this important road safety feature, i.e., through the use of smart tires or tires embedded with sensors. The main findings can be summarized as follows:
- A pavement’s skid resistance is directly related to tire–road friction thereby affecting vehicle maneuvering and braking under various weather conditions reflected through dry, wet, dusty and icy road surfaces or combinations of the aforementioned circumstances.
- Given its significance and its relationship to road incidents, friction is normally measured by almost every road entity at periodical time intervals with standardized equipment in the framework of a PMS.
- In parallel, the benefits of using smart sensors embedded in tires were introduced mainly as a tool to promote advanced vehicle control but also as a cost-effective yet necessary approach to evaluating in real-time the friction level of a roadway section while traveling.
- Such an approach is expected to assist drivers in adjusting their behavior (i.e., lower their speed) in case indications of reduced skid resistance are observed in favor of road safety.
Apart from the current capabilities of smart tires, mainly for vehicle-based applications, the following key points and prospects can be introduced for future consideration:
- Smart tires appear as an intelligent means for enhancing road safety both for current traffic modes as well as for future mobility patterns with AVs and CAVs.
- Thanks to the connectivity aspects of smart tires, it might be feasible not only to improve driving safety but also to help to control pavement deterioration. Focusing on skid resistance, it also appears that smart tires can assist in effective roadway monitoring. Of course, the goal is not to substitute existing systems in terms of decision-making; rather, it is to complement and even ameliorate the current state of practice by identifying areas where additional monitoring effort needs to be considered for condition assessment. More relevant research is needed in these directions.
- Particular research challenges should be addressed, such as the impact of icy surfaces on the efficacy of smart tires. Icy conditions are critical for vehicle stability, and the presence of ice on a road surface induces dangerous driving conditions that require systematic investigation in conjunction with potential benefits from the use of smart tires.
Overall, continuous research efforts have to be fostered to efficiently address current challenges and transform them into future opportunities.
Funding
This research received no external funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The author declares no conflict of interest.
References
- Khaleghian, S.; Emami, A.; Taheri, S. A technical survey on tire-road friction estimation. Friction 2017, 5, 123–146. [Google Scholar] [CrossRef] [Green Version]
- Behroozinia, P.; Khaleghian, S.; Taheri, S.; Mirzaeifar, R. An investigation towards intelligent tyres using finite element analysis. Int. J. Pavement Eng. 2020, 21, 311–321. [Google Scholar] [CrossRef]
- Fwa, T.F. Skid resistance determination for pavement management and wet-weather road safety. Int. J. Transp. Sci. Technol. 2017, 6, 217–227. [Google Scholar] [CrossRef]
- Fwa, T.F. Determination and prediction of pavement skid resistance–connecting research and practice. J. Road Eng. 2021, 1, 43–62. [Google Scholar] [CrossRef]
- Elkhazindar, A.; Hafez, M.; Ksaibati, K. Incorporating Pavement Friction Management into Pavement Asset Management Systems: State Department of Transportation Experience. CivilEng 2022, 3, 32. [Google Scholar] [CrossRef]
- Fatality Analysis Reporting System; National Highway Traffic Safety Administration: Washington, DC, USA, 2012.
- Connelly, L.B.; Supangan, R. The economic costs of road traffic crashes: Australia, states and territories. Accid. Anal. Prev. 2006, 38, 1087–1093. [Google Scholar] [CrossRef]
- Najafi, S.; Flintsch, G.W.; Khaleghian, S. Fuzzy logic inference based Pavement Friction Management and real-time slippery warning systems: A proof of concept study. Accid. Anal. Prev. 2016, 90, 41–49. [Google Scholar] [CrossRef]
- Najafi, S.; Flintsch, G.W.; Khaleghian, S. Pavement friction management–artificial neural network approach. Int. J. Pavement Eng. 2019, 20, 125–135. [Google Scholar] [CrossRef]
- Pomoni, M.; Plati, C.; Loizos, A.; Yannis, G. Investigation of pavement skid resistance and macrotexture on a long-term basis. Int. J. Pavement Eng. 2022, 23, 1060–1069. [Google Scholar] [CrossRef]
- Ziakopoulos, A.; Yannis, G. A review of spatial approaches in road safety. Accid. Anal. Prev. 2020, 135, 105323. [Google Scholar] [CrossRef]
- Ahammed, M.A.; Tighe, S.L. Asphalt pavements surface texture and skid resistance—Exploring the reality. Can. J. Civ. Eng. 2012, 39, 1–9. [Google Scholar] [CrossRef]
- Thenuwara, H.V.; Pasindu, H. Methodology to Incorporate Frictional Performance in the Pavement Management System of Sri Lankan Expressways. In Proceedings of the 2020 Moratuwa Engineering Research Conference (MERCon), Virtual event, 28–30 July 2020; pp. 437–442. [Google Scholar] [CrossRef]
- Federal Highway Administration. Pavement Friction Management Program Utilizing Continuous Friction Measurement Equipment and State-of-the-Practice Safety Analysis Demonstration Project—Final Report; Report No. FHWA-RC-20-0009; Virginia Polytechnic Institute and State University Applied Pavement Technology, Inc.: Charlottesville, VA, USA, 2019.
- Rasol, M.; Schmidt, F.; Ientile, S.; Adelaide, L.; Nedjar, B.; Kane, M.; Chevalier, C. Progress and Monitoring Opportunities of Skid Resistance in Road Transport: A Critical Review and Road Sensors. Remote Sens. 2021, 13, 3729. [Google Scholar] [CrossRef]
- Sattar, S.; Li, S.; Chapman, M. Road Surface Monitoring Using Smartphone Sensors: A Review. Sensors 2018, 18, 3845. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Pan, Y.; Zhang, X.; Sun, M.; Zhao, Q. Object-Based and Supervised Detection of Potholes and Cracks from the Pavement Images Acquired by UAV. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 209–217. [Google Scholar] [CrossRef] [Green Version]
- Christodoulou, S.; Kyriakou, C.; Hadjidemetriou, G. Pavement Patch Defects Detection and Classification Using Smartphones, Vibration Signals and Video Images. In Advanced Computing Strategies for Engineering; Elsevier: Amsterdam, The Netherlands, 2019; pp. 365–380. [Google Scholar]
- Hadjidemetriou, G.M.; Christodoulou, S.E. Vision-and entropy-based detection of distressed areas for integrated pavement condition assessment. J. Comput. Civ. Eng. 2019, 33, 04019020. [Google Scholar] [CrossRef]
- Ranyal, E.; Sadhu, A.; Jain, K. Road Condition Monitoring Using Smart Sensing and Artificial Intelligence: A Review. Sensors 2022, 22, 3044. [Google Scholar] [CrossRef]
- Singh, K.B. Intelligent Tire-Based Road Friction Estimation System and Method. U.S. Patent US20160159365A1, 9 June 2016. [Google Scholar]
- Miyazaki, N. Road Surface Friction Sensor and Road Surface Friction Coefficient Detector, and Vehicle Antilock Braking Device. U.S. Patent US20020120383A1, 29 August 2002. [Google Scholar]
- Xu, N.; Huang, Y.; Askari, H.; Tang, Z. Tire Slip Angle Estimation based on the Intelligent Tire Technology. Electr. Eng. Syst. Sci. 2021, 70, 2239–2249. [Google Scholar] [CrossRef]
- Zhu, B.; Han, J.; Zhao, J. Tire-Pressure Identification Using Intelligent Tire with Three-Axis Accelerometer. Sensors 2019, 19, 2560. [Google Scholar] [CrossRef] [Green Version]
- Jalali, M.; Khosravani, S.; Khajepour, A.; Chen, S.K.; Litkouhi, B. Model predictive control of vehicle stability using coordinated active steering and differential brakes. Mechatronics 2017, 48, 30–41. [Google Scholar] [CrossRef]
- Lu, Q.; Gentile, P.; Tota, A.; Sorniotti, A.; Gruber, P.; Costamagna, F. Enhancing vehicle cornering limit through sideslip and yaw rate control. Mech. Syst. Signal Proc. 2016, 75, 455–472. [Google Scholar] [CrossRef]
- Sivaramakrishnan, S.; Siramdasu, Y.; Taheri, S. A new design tool for tire braking performance evaluations. J. Dyn. Syst. Meas. Control 2015, 137, 071013. [Google Scholar] [CrossRef]
- Guo, H.; Yin, Z.; Cao, D.; Chen, H.; Lv, C. A review of estimation for vehicle tire-road interactions toward automated driving. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 14–30. [Google Scholar] [CrossRef]
- Askari, H.; Hashemi, E.; Khajepour, A.; Khamesee, M.B.; Wang, Z.L. Tire condition monitoring and intelligent tires using nanogenerators based on piezoelectric, electromagnetic, and triboelectric effects. Adv. Mater. Technol. 2019, 4, 1800105. [Google Scholar] [CrossRef] [Green Version]
- Continental. Available online: https://www.continental-tyres.co.uk/car/stories/technology-and-innovation/intelligent-tyres (accessed on 28 April 2022).
- Bianchini, A.; Heitzman, M.; Maghsoodloo, S. Evaluation of Temperature Influence on Friction Measurements. J. Transp. Eng. 2011, 137, 640–647. [Google Scholar] [CrossRef]
- Singh, K.B.; Taheri, S. Estimation of tire–road friction coefficient and its application in chassis control systems. Syst. Sci. Control. Eng. 2015, 3, 39–61. [Google Scholar] [CrossRef] [Green Version]
- Hall, J.W.; Smith, K.L.; Titus-Glover, L.; Wambold, J.C.; Yager, T.J.; Rado, Z. Guide for Pavement Friction; Contractor’s Final Report for NCHRP Project 01-43; Web-Only Document 108; NCHRP, Transportation Research Board: Washington, DC, USA, 2009. [Google Scholar]
- Rana, M.M.; Hossain, K. Impact of autonomous truck implementation: Rutting and highway safety perspectives. Mater. Pavement Des. 2021, 1–22. [Google Scholar] [CrossRef]
- Yu, M.; Wu, G.; Kong, L.; Tang, Y. Tire-Pavement Friction Characteristics with Elastic Properties of Asphalt Pavements. Appl. Sci. 2017, 7, 1123. [Google Scholar] [CrossRef] [Green Version]
- Pranjić, I.; Deluka-Tibljas, A.; Cuculic, M.; Šurdonja, S. Influence of pavement macrotexture on pavement skid resistance. Transp. Res. Procedia 2020, 45, 747–754. [Google Scholar] [CrossRef]
- Kumar, A.; Gupta, A. Review of Factors Controlling Skid Resistance at Tire-Pavement Interface. Adv. Civ. Eng. 2021, 45, 2733054. [Google Scholar] [CrossRef]
- Mataei, B.; Zakeri, H.; Zahedi, M.; Nejad, F.M. Pavement Friction and Skid Resistance Measurement Methods: A Literature Review. Open J. Civ. Eng. 2016, 6, 537–565. [Google Scholar] [CrossRef] [Green Version]
- Azzam, A.; Ali Khasawneh, M.; Al-Omari, A.A.; Masad, E.; Kassem, E. A statistical approach for predicting skid resistance of asphalt pavements. Int. J. Pavement Res. Technol. 2021, 14, 647–654. [Google Scholar] [CrossRef]
- Pomoni, M.; Plati, C.; Kane, M.; Loizos, A. Polishing behaviour of asphalt surface course containing recycled materials. Int. J. Transp. Sci. Technol. 2021; in press. [Google Scholar] [CrossRef]
- Wilson, D.J. An Analysis of the Seasonal and Short-Term Variation of Road Pavement Skid Resistance. Ph.D. Thesis, The University of Auckland, Auckland, New Zealand, 2006. [Google Scholar]
- Li, Q.J.; Zhan, Y.; Yang, G.; Pittenger, D.M.; Wang, K.C.P. 3D Characterization of Aggregates for Pavement Skid Resistance. J. Transp. Eng. Part B Pavements 2019, 145, 04019002. [Google Scholar] [CrossRef]
- White, G.; Ward, C.; Jamieson, S. Field evaluation of a handheld laser meter for pavement surface macrotexture measurement. Int. J. Pavement Eng. 2021, 22, 950–959. [Google Scholar] [CrossRef]
- Kane, M.; Do, M.T.; Cerezo, V.; Rado, Z.; Khelifi, C. Contribution to pavement friction modelling: An introduction of the wetting effect. Int. J. Pavement Eng. 2019, 20, 965–976. [Google Scholar] [CrossRef]
- Acosta, M.; Kanarachos, S.; Blundell, M. Road Friction Virtual Sensing: A Review of Estimation Techniques with Emphasis on Low Excitation Approaches. Appl. Sci. 2017, 7, 1230. [Google Scholar] [CrossRef] [Green Version]
- Moore, D.; Geyer, W. A review of adhesion theories for elastomers. Wear 1972, 22, 113–141. [Google Scholar] [CrossRef]
- Michelin. The Tyre, Grip; Société de Technologie Michelin: Clermont-Ferrand, France, 2001. [Google Scholar]
- Ottawa/Macdonald-Cartier International Airport. Transportation Safety Board of Canada; Runway Overrun (Aviation Investigation Report A10H0004); States Airlines LLC: Ottawa, ON, Canada, 2010. [Google Scholar]
- Villani, M.M.; Artamendi, I.; Kane, M.; Scarpas, A. Contribution of hysteresis component of tire rubber friction on stone surfaces. Transp. Res. Board 2011, 2227, 153–162. [Google Scholar] [CrossRef]
- Yu, M.; You, Z.; Wue, G.; Kong, L.; Liu, C.; Gao, J. Measurement and modeling of skid resistance of asphalt pavement: A review. Constr. Build. Mater. 2020, 260, 119878. [Google Scholar] [CrossRef]
- Xie, X.; Lu, G.; Liu, P.; Zhou, Y.; Wang, D.; Oeser, M. Influence of temperature on polishing behaviour of asphalt road surfaces. Wear 2018, 402–403, 49–56. [Google Scholar] [CrossRef]
- Yan, B.; Mao, H.; Zhong, S.; Zhang, P.; Zhang, X. Experimental Study on Wet Skid Resistance of Asphalt Pavements in Icy Conditions. Materials 2019, 12, 1201. [Google Scholar] [CrossRef] [Green Version]
- Dunford, A.; Roe, P.G. BOS Slag as a Surface Coarse Aggregate; Published Project Report—PPR647; Transport Research Laboratory: Berks, UK, 2010. [Google Scholar]
- Do, M.-T.; Tang, Z.; Kane, M.; de Larrard, F. Pavement polishing—Development of a dedicated laboratory test and its correlation with road results. Wear 2007, 263, 36–42. [Google Scholar] [CrossRef]
- Pomoni, M. Investigation of Asphalt Pavements Surface Friction in the Framework of Sustainable Road Infrastructures. Ph.D. Thesis, National Technical University of Athens, Athens, Greece, 2021. [Google Scholar]
- Anupam, K.; Srirangam, S.K.; Scarpas, A.; Kasbergen, C. Influence of temperature on tire-pavement friction: Analyses. Transp. Res. Board 2013, 2369, 114–124. [Google Scholar] [CrossRef]
- Kouchaki, S.; Roshani, H.; Prozzi, J.A.; Garcia, N.Z.; Hernandez, J.B. Field Investigation of Relationship between Pavement Surface Texture and Friction. Transp. Res. Board 2018, 2672, 395–407. [Google Scholar] [CrossRef]
- ASTM E303-93; Standard Test Method for Measuring Surface Frictional Properties Using the British Pendulum Tester. ASTM International: West Conshohocken, PA, USA, 2018.
- Sanders, P.D.; McRobbie, S.; Gopaldas, J.; Viner, H.E. Development of a Reference Surface for the Assessment of Pavement Skid Resistance Measurement Devices; Published Project Report Ppr771; Transport Research Laboratory: Berks, UK, 2015. [Google Scholar]
- EU Project TYROSAFE. Deliverable D05: Report on Analysis and Findings of Previous Skid Resistance Harmonization Research Projects; FEHRL: Brussels, Belgium, 2009. [Google Scholar]
- Choi, Y. Austroads Technical Report: Review of Skid Resistance and Measurement Methods; Austroads Ltd.: Sydney, Australia, 2011. [Google Scholar]
- Neaylon, K. Austroads Research Report: Guidance for the Development of Policy to Manage Skid Resistance; Austroads Ltd.: Sydney, Australia, 2011. [Google Scholar]
- Choi, Y. Austroads Research Report: Review of Variability in Skid Resistance Measurement and Data Management; Austroads Ltd.: Sydney, Australia, 2013. [Google Scholar]
- Ueckermann, A.; Wang, D.; Oeser, M.; Steinauer, B. Calculation of skid resistance from texture measurements. J. Traffic Transp. Eng. 2015, 2, 3–16. [Google Scholar] [CrossRef] [Green Version]
- Afonso, M.L.; Dinis-Almeida, M.; Sena Fael, C. Characterization of the Skid Resistance and Mean Texture Depth in a Permeable Asphalt Pavement. IOP Conf. Ser. Mater. Sci. Eng. 2019, 471, 022029. [Google Scholar] [CrossRef]
- Hofko, B.; Kugler, H.; Chankov, G.; Spielhofer, R. A laboratory procedure for predicting skid and polishing resistance of road surfaces. Int. J. Pavement Eng. 2019, 20, 439–447. [Google Scholar] [CrossRef] [Green Version]
- Wang, D.; Zhang, Z.; Kollmann, J.; Oeser, M. Development of aggregate micro-texture during polishing and correlation with skid resistance. Int. J. Pavement Eng. 2020, 21, 629–641. [Google Scholar] [CrossRef]
- Jin, X.; Yin, G.; Chen, N. Advanced Estimation Techniques for Vehicle System Dynamic State: A Survey. Sensors 2019, 19, 4289. [Google Scholar] [CrossRef] [Green Version]
- Mazzilli, V.; Ivone, D.; De Pinto, S.; Pascali, L.; Contrino, M.; Tarquinio, G.; Gruber, P.; Sorniotti, A. On the benefit of smart tyre technology on vehicle state estimation. Veh. Syst. Dyn. 2021; in press. [Google Scholar] [CrossRef]
- Bastiaan, J.M. Design of a Smart Tire Sensor System; University of Waterloo: Waterloo, ON, Canada, 2015. [Google Scholar]
- Guo, M.; Zhou, X. Tire-Pavement Contact Stress Characteristics and Critical Slip Ratio at Multiple Working Conditions. Adv. Mater. Sci. Eng. 2019, 2019, 5178516. [Google Scholar] [CrossRef] [Green Version]
- Douglas, R.A.; Woodward, W.D.H.; Woodside, A.R. Road contact stresses and forces under tires with low inflation pressure. Can. J. Civ. Eng. 2000, 27, 1248–1258. [Google Scholar] [CrossRef]
- National Highway Traffic Safety Administration. Mechanics of Pneumatic Tires; United States Department of Transportation: Washington, DC, USA, 1981; Chapter 9.
- Koskinen, S.; Peussa, P. FRICTION Final Report; Technical Report No. FP6-IST-2004-4-027006; Information Society Technologies (IST) Programme, European Union: Tampere, Finland, 2009. [Google Scholar]
- Baffet, G.; Charara, A.; Lechner, D. Estimation of vehicle sideslip, tire force and wheel cornering stiffness. Control. Eng. Pract. 2009, 17, 1255–1264. [Google Scholar] [CrossRef] [Green Version]
- Savaresi, S.M.; Tanelli, M. Active Braking Control Systems Design for Vehicles; Springer: London, UK, 2010. [Google Scholar]
- Matsuzaki, R.; Keating, T.; Todoroki, A.; Hiraoka, N. Rubber-Based Strain Sensor Fabricated Using Photolithography for Intelligent Tires. Sens. Actuators A Phys. 2008, 148, 1–9. [Google Scholar] [CrossRef]
- Miyoshi, A. Method for Estimating Tire Force Acting on Rolling Tire. U.S. Patent US20080245459A1, 9 October 2008. [Google Scholar]
- Mendoza-Petit, M.F.; García-Pozuelo, D.; Díaz, V.; Olatunbosun, O. A Strain-Based Intelligent Tire to Detect Contact Patch Features for Complex Maneuvers. Sensors 2020, 20, 1750. [Google Scholar] [CrossRef] [PubMed]
- Klein, S.D. Friction Estimation and Detection for an Electric Power Steering System. U.S. Patent US9150244B2, 6 October 2015. [Google Scholar]
- Hattori, Y. Method for Detecting Strain State of Tire, Device for Detecting the Strain State, Sensor Unit for the Method and Device, and Tire Provided with the Sensor Unit. U.S. Patent US20050146423A1, 7 July 2005. [Google Scholar]
- Singh, K.B.; Parsons, A.W.; Engel, M.; Suh, P.J.M. Tire Load Estimation System Using Road Profile Adaptive Filtering. U.S. Patent US8844346B1, 30 September 2014. [Google Scholar]
- Balkwill, K.J.; Hopkins, R.F. Surface friction measuring device. U.S. Patent US20070283744A1, 13 December 2007. [Google Scholar]
- Abe, Y.; Sawa, T. Dynamic Friction Coefficient Measuring Apparatus. U.S. Patent US4594878A, 17 June 1986. [Google Scholar]
- Miyoshi, A.; Tsurita, T.; Kunii, M. System and Method for Determining Tire Force. U.S. Patent US7249498B2, 31 July 2007. [Google Scholar]
- Lee, D.; Kim, J.-C.; Kim, M.; Lee, H. Intelligent Tire Sensor-Based Real-Time Road Surface Classification Using an Artificial Neural Network. Sensors 2021, 21, 3233. [Google Scholar] [CrossRef]
- Singh, K.B.; Ali Arat, M.; Taheri, S. An Intelligent Tire Based Tire-Road Friction Estimation Technique and Adaptive Wheel Slip Controller for Antilock Brake System. J. Dyn. Systems. Meas. Control. 2013, 135, 031002. [Google Scholar] [CrossRef]
- Umeno, T.; Ono, E.; Asano, K.; Ito, S.; Tanaka, A.; Yasui, Y.; Sawada, M. Estimation of Tire-Road Friction Using Tire Vibration Model. J. Passeng. Car Mech Syst. J. 2002, 111, 1553–1558. [Google Scholar] [CrossRef]
- Sainath, T.; Kingbury, B.; Saon, G.; Soltau, H.; Mohamed, A.-R.; Dahl, G.; Ramabhadran, B. Deep convolutional neural networks for large-scale speech tasks. Neural Netw. 2015, 64, 39–48. [Google Scholar] [CrossRef]
- Fontaine, M.; Coiret, A.; Cesbron, J.; Baltazart, V.; Bétaille, D. In-Tire Distributed Optical Fiber (DOF) Sensor for the Load Assessment of Light Vehicles in Static Conditions. Sensors 2021, 21, 6874. [Google Scholar] [CrossRef]
- Pais, J.C.; Amorim, S.I.R.; Minhoto, M.J.C. Impact of Traffic Overload on Road Pavement Performance. J. Transp. Eng. 2013, 139, 873–879. [Google Scholar] [CrossRef]
- Lee, H.; Taheri, S. Intelligent Tires—A Review of Tire Characterization Literature. IEEE Intell. Transp. Syst. Mag. 2017, 9, 114–135. [Google Scholar] [CrossRef]
- Matsuzaki, R.; Todoroki, A. Wireless Monitoring of Automobile Tires for Intelligent Tires. Sensors 2008, 8, 8123–8138. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Nokian. Available online: https://www.nokiantyres.com/company/news-article/smart-tires-are-coming-how-consumers-will-benefit-from-sensor-technology/ (accessed on 28 April 2022).
- Pirelli. Available online: https://www.pirelli.com/global/en-ww/road/from-the-tarmac-to-5g-pirelli-s-smart-tyres-describe-the-road-surface (accessed on 28 April 2022).
- Goodyear. Available online: https://www.washingtonpost.com/technology/2021/06/16/goodyear-smart-car-tires/ (accessed on 28 April 2022).
- Lee, D.-H.; Yoon, D.-S.; Kim, G.-W. New Indirect Tire Pressure Monitoring System Enabled by Adaptive Extended Kalman Filtering of Vehicle Suspension Systems. Electronics 2021, 10, 1359. [Google Scholar] [CrossRef]
- Goodyear. Available online: https://supplychainbeyond.com/future-of-transportation-smart-tire/ (accessed on 28 April 2022).
- Szczucka-Lasota, B.; Węgrzyn, T.; Łazarz, B.; Kaminska, J.A. Tire pressure remote monitoring system reducing the rubber waste. Transp. Res. Part D 2021, 98, 102987. [Google Scholar] [CrossRef]
- Continental. Available online: https://www.tiretechnologyinternational.com/news/research-development/continental-reveals-tire-braking-test-vehicle.html (accessed on 12 July 2022).
- Andersson, P.; Ivehammar, P. Benefits and costs of autonomous trucks and cars. J. Transp. Technol. 2019, 9, 121–145. [Google Scholar] [CrossRef] [Green Version]
- Machiani, S.G.; Ahmadi, A.; Musial, W.; Katthe, A.; Melendez, B.; Jahangiri, A. Implications of a Narrow Automated Vehicle-Exclusive Lane on Interstate 15 Express Lanes. J. Adv. Transp. 2021, 6617205. [Google Scholar]
- Litman, T. Autonomous Vehicle Implementation Predictions: Implications for Transport Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2020. [Google Scholar]
- Okte, E.; Al-Qadi, I.L. Impact of Autonomous and Human-Driven Trucks on Flexible Pavement Design. Transp. Res. Record, 2022; in press. [Google Scholar] [CrossRef]
- Zhou, F.; Hu, S.; Chrysler, S.T.; Kim, Y.; Damnjanovic, I.; Talebpour, A.; Espejo, A. Optimization of lateral wandering of automated vehicles to reduce hydroplaning potential and to improve pavement life. Transp. Res. Rec. 2019, 2673, 81–89. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).