5.1. Validation of Proposed EDS Model
In order to demonstrate the accuracy of the EDS model, for each design in the database (cf.
Table 2), the model is parameterized. The results of each parameterized model are then compared to the respective values in the database. As it was done in [
40], for each design, the quality of the model is evaluated using the interpolation stability index
and the coefficient of determination
Both criteria are evaluated for the loss model as well as for the maximum torque model. The variable
z in Equations (
18) and (
19) denotes the FE-calculated power loss in the case of the loss model and the FE-calculated maximum shaft power in the case of the maximum torque model. The variable
denotes the respective modelled values,
is the mean of the FE-calculated values, and
denotes the number of test points. All valid test points are used for the evaluation, including those at zero load. The investigated designs correspond to the database, and the main design variables are varied within the range presented in
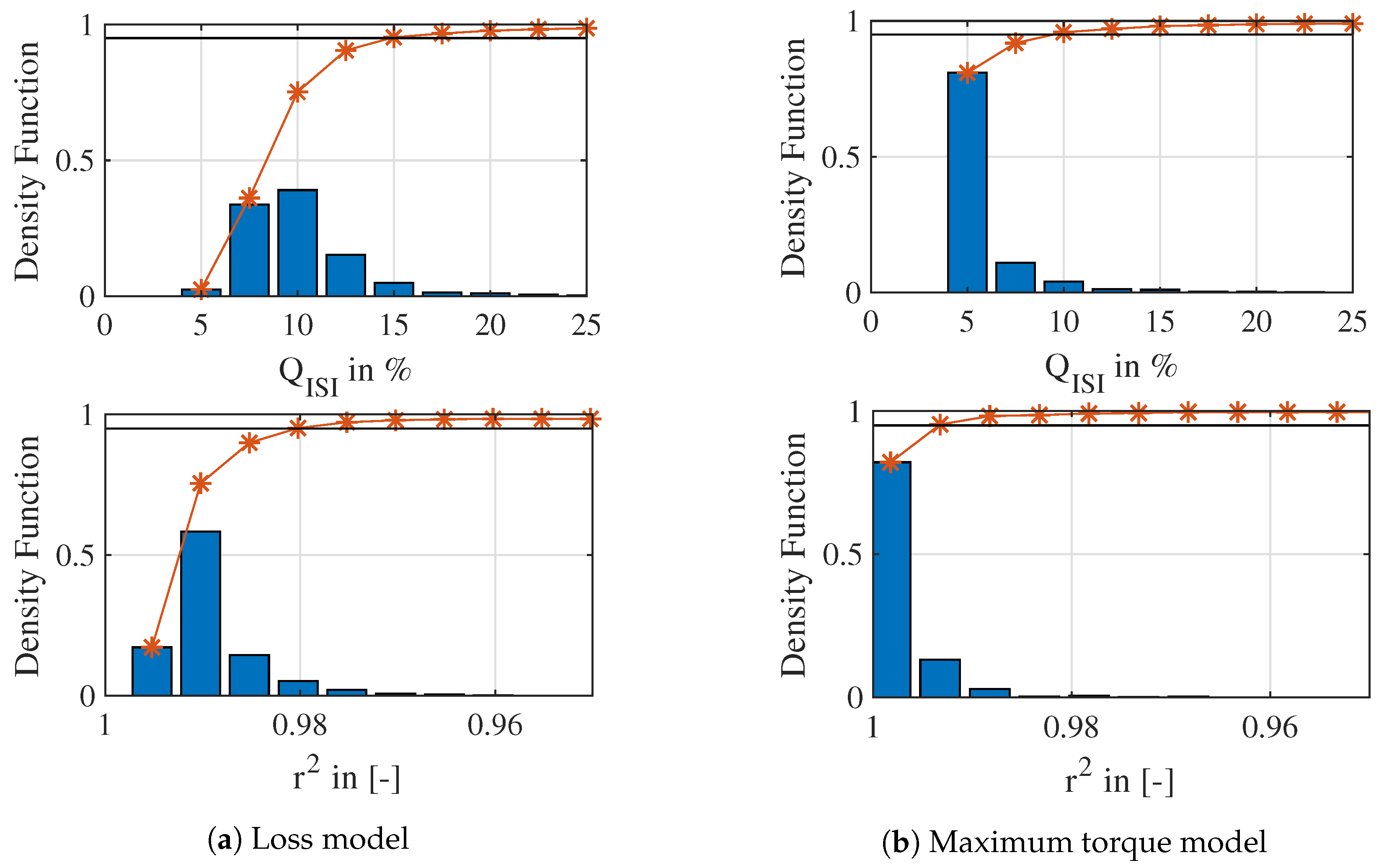
Table 2. The resulting statistical distributions for both criterion are given in
Figure 4.
Regarding the loss model, most of the investigated designs achieve a
between 7% and 12% as can be seen in
Figure 4a. As indicated by the intersection between the cumulative density and the horizontal black line, 95% show values better than 15%.
Figure 4a also presents the coefficient of determination achieved with the loss model. Most designs are found to predict the losses with an accuracy around 0.99. A value better than 0.98 is observed for 95% of the investigated designs.
The interpolation stability index of the maximum torque model can be found around 5% for most of the investigated designs, as
Figure 4b demonstrates. A
is observed for 95% of the designs. The achievable coefficient of determination is also plotted in
Figure 4b. More than 80% show an
around 0.998, and 95% of the designs are better than 0.993.
The results demonstrate the good accuracy of the polynomial model. Even for a variation of many design variables—such as geometry, winding, electric, and material parameters—the model shows a good robustness. The results allow the usage of the model within a system-level design optimization. In order to further investigate the influence of the occurring modelling error on the
emissions, a consumption simulation is conducted, and the results of the polynomial model are compared to those with the FE-calculated loss map and maximum torque curve. To investigate the worst case scenario, a design with greater modelling error is chosen. During the fitting process, this design shows for the loss model
/
and for the maximum torque model
/
. The resulting relative deviation in
emissions is calculated with
In
Figure 5, the results are plotted for different driving cycles. In all cases, the modelling error in the EDS model leads to only small deviations in
emissions, far below 1%.
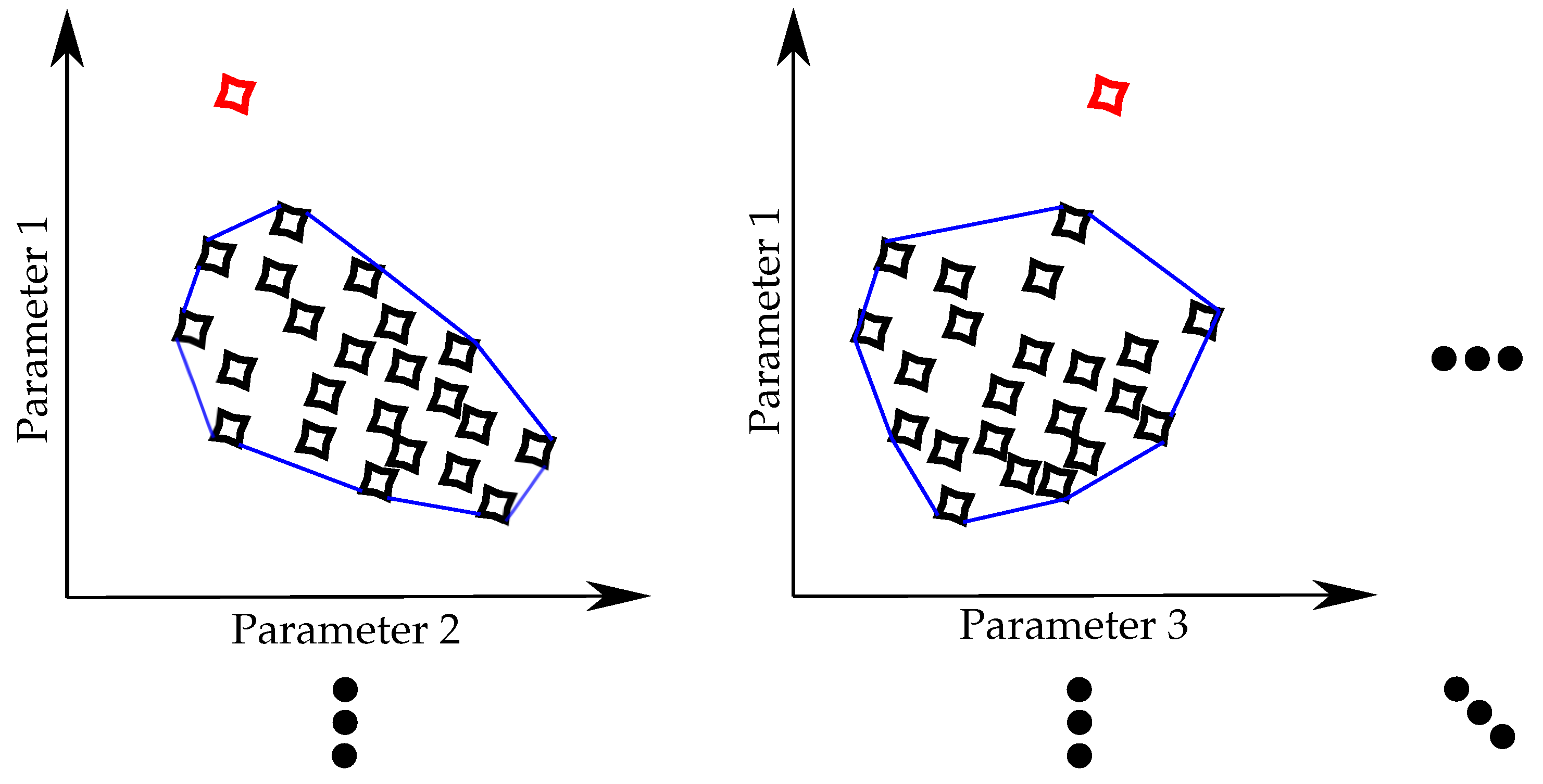
In the following, the limiting function is constructed based on the obtained 16 parameters of the polynomial model. Designs showing a bad fit are eliminated in order to guarantee a good quality of the model. The maximum allowable error is chosen as to allow most of the designs to contribute to the models and is presented in
Table 4. Furthermore, outliers are eliminated to prevent large white spaces within the convex hull limiting function (cf.
Figure 3).
5.2. HEV System Optimization
In the first step, the ANN predicting the
emissions is validated. To do so, the predicted values
are compared to the calculated values
z by applying the statistics
and
in Equations (
18) and (
19). This time, the variable
z denotes the
emission obtained by the consumption simulation, and
the emissions obtained with the ANN model. For both investigated topologies, the achieved accuracy of the
models is shown in
Table 5. It allows the consumption simulation to be replaced within the global optimization.
Finally, the optimization scheme in
Figure 2 is run two times for different topologies. During the first optimization, the EDS parameters are varied in the P2 position. The second one optimizes a P14 topology, where the parameters in the P4 position are varied. Both procedures are started with an identical start population.
Figure 6 presents the resulting Pareto charts. The
reduction potential is defined as a percentage of the conventional vehicle’s emission
and represents the weighted average of the three investigated driving cycles. For this study, an equal weight for all cycles is chosen.
A weighted reduction potential of up to 28% can be achieved with a P2 hybrid. Most of this potential can already be covered with an installed mechanical EDS power of 20–25 kW. In contrast, the P4 hybrid further increases this potential with up to a 34% savings. Again, an installed mechanical EDS power of 20–25 kW is necessary to cover most of the reduction potential. The large variance in the savings of up to 15% for a constant EDS power results from the varying EDS characteristic. This underlines the importance of investigating not only the EDS power but also the entire EDS characteristic.
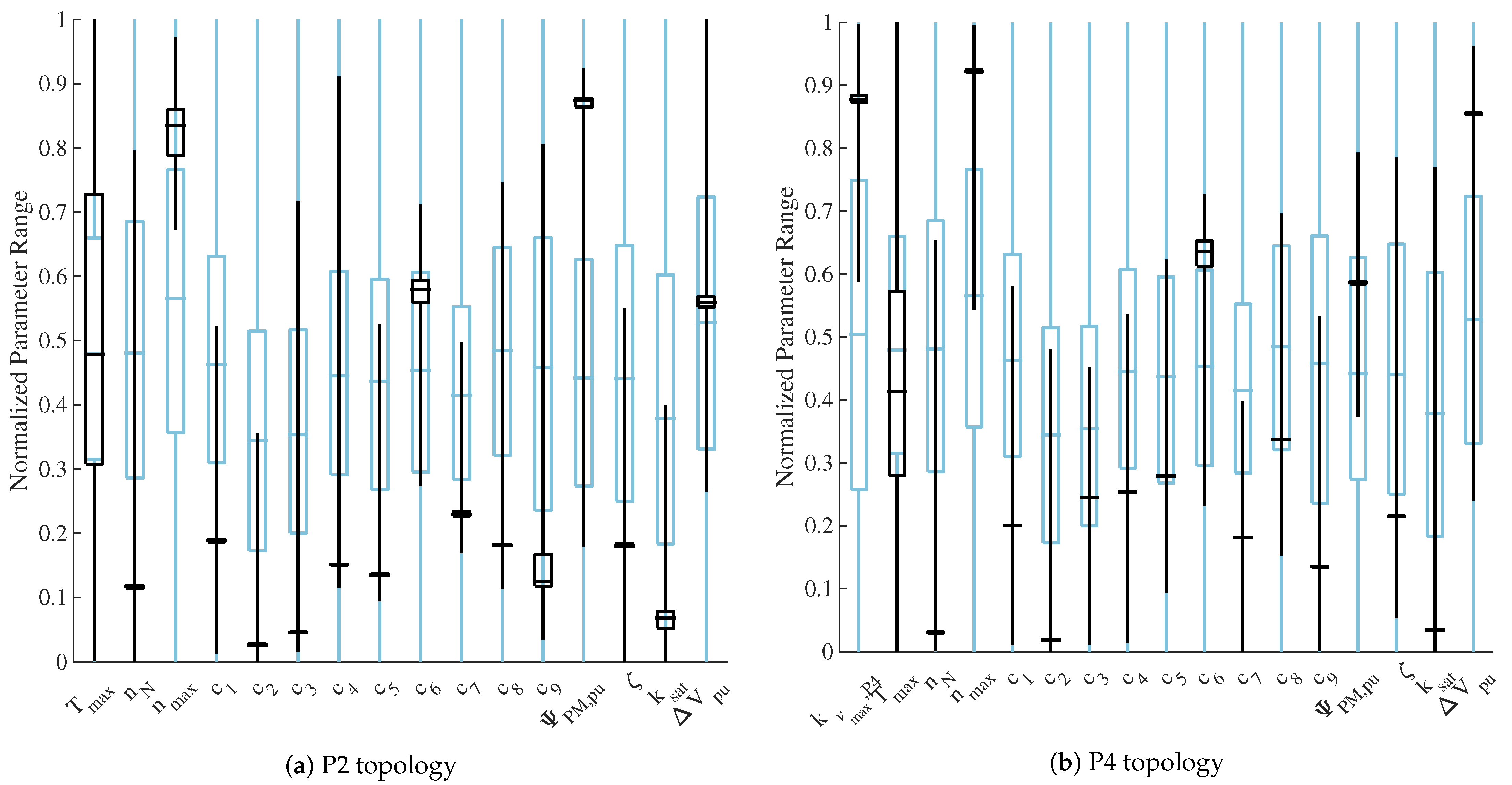
The developed approach in this paper further allows conclusions on the optimal EDS characteristics for a specific application. The sensitivity between the 16 EDS parameters and the fuel consumption can be investigated by taking a closer look at the evolution of the parameter range during optimization. Based on expert knowledge, conclusions on the application-specific optimal electromagnetic design can be extracted.
Figure 7 presents the parameter range of the variation parameters and compares the optimal last generation against the random start population. The values are normalized with regard to the maximum and minimum values. The statistic
boxplot representation is chosen to visualize the optimizer’s path. The box includes the 25th to 75th percentile. By comparing the start population against the last generation, a contraction of the boxes can be observed, and the parameter range is concentrated to a specific optimal region. The optimal parameter ranges, eventual interdependencies between several parameters, and their impact on the electromagnetic design are discussed in the following.
For both topologies, the nominal speed shows minimal values. Especially in the P4 position, a minimal nominal speed seems to be optimal. A low nominal speed enables the maximum power at low speed, which explains this behaviour. The missing multi-gear transmission in the P4 position further increases the need for a small nominal speed. This allows one to conclude that an optimal drive in the P4 position will require a higher torque capability and therefore more active volume compared to an equally powered optimal drive in the P2 position. Having a minimal nominal speed, the maximum torque ensures the variation in mechanical EDS power. Therefore, the torque shows a broad variation range. In contrast to the nominal speed, the maximum EDS speed is optimally maximized. In the case of the P4 position, the additional parameter has been introduced. Comparable to the maximum speed, this decoupling coefficient also tends to higher values, although it is not at its maximum for most designs on the final Pareto front. The maximum engaged speed is proportional to the product of maximum speed and decoupling coefficient and should be large enough to gather most of the recuperation energy at high vehicle velocity. For higher speeds, it is more efficient to decouple the electric machine due to the increasing EDS losses at higher speed.
As could be expected, the optimizer tries to minimize the loss coefficients – to increase the savings. The only loss coefficient which is not minimized is the coefficient responsible for the asymmetric behaviour in motoring and generating mode. However, decreasing loss coefficients will require an increase in active volume, which will imply an increase in cost and installation space. Whereas the speed dependent coefficients and are minimized for both topologies, the torque dependent coefficients and seem to be more important in the P2 position. While a decreasing coefficient can be achieved by a higher power factor and therefore an increasing magnet flux contribution , a higher amount of copper will lead to a decreasing coefficient . The loss coefficient highly influencing the no-load losses in the field-weakening region is more important in the P4 position. Since the physical meaning of this coefficient is coupled to the field-weakening effort, the smaller values for require a smaller magnet flux contribution . Such coupling effects between the different EDS parameters are achieved due to the limiting function. In contrast, the optimal magnet flux contribution in the P2 position is relatively high, leading to less magnetizing current and therefore smaller coefficients and . The general minimization of the loss coefficients leads to less utilized machines and therefore to low saturation values .
From the Pareto front in
Figure 6, one optimal design is chosen by weighting the objectives
and
at the ratio of 2 to 1. The related EDS characteristics are plotted in
Figure 8. By comparing the efficiency maps, the same correlations as before can be observed. A good efficiency around zero torque seems to be optimal for both investigated parallel hybrid topologies. In a P2 position, a good efficiency at low speed and higher torque is beneficial, since the gear box maintains the operating speed within a restricted area. In a P4 position, the EDS speed is coupled to the vehicle’s velocity. Good efficiencies are then required at a higher speed and low torque.
As the previous results demonstrated, the newly developed data-enhanced EDS model allows a detailed and comprehensive investigation on the optimal EDS characteristics for different specific applications. One minor weakness of the polynomial loss model can be observed in
Figure 8. The optimizer tends to choose relatively high values for the loss coefficient
responsible for the asymmetric behaviour between motoring and generating mode. This leads to a slightly stronger asymmetry than expected. In order to keep the coefficient
in check, some caution has to be paid to the limiting function and the database it is constructed from. The size of the database is especially an important factor and should be chosen with care.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}