1. Introduction
Intersection is an important scenario in transportation systems. As vehicles from different directions merge at intersections, traffic congestion or accidents happen easily. According to a survey, many wastes of fuel, time and economy were related to intersection congestions and accidents [
1]. Therefore, lots of works about intersection management have been carried out to reduce these wastes over the years, such as optimal traffic light scheduling [
2,
3], cooperative autonomous driving [
4,
5] and so on.
Cooperative autonomous driving is one of the most promising methods for intersection management, which is the combination of vehicle-to-everything (V2X) [
6] communications and connected automated vehicles (CAVs) [
7] technologies. V2X is a typical application of the Internet of Things (IoT) [
8] in the field of the intelligent transportation systems (ITS) [
9], which integrates various wireless communication technologies to facilitate information exchange among vehicles, roadside infrastructure, pedestrians, and all other entities. With the help of V2X, CAVs can effectively sense and analyze the traffic environment in real time. Thus, CAVs can make optimal trajectories in advance to drive through intersections safely and efficiently. The application of cooperative autonomous driving at intersections is termed as autonomous intersection management (AIM), which can greatly improve the traffic efficiency and safety at intersections [
10].
The research in AIM can be categorized into centralized and decentralized approaches [
11]. The centralized approach [
12] involves a management agent to coordinate the rights-of-way for the CAVs, where the management agent tries to optimize the system performance after receiving the information from all the related CAVs. In addition, the CAVs need to strictly follow the orders received from the management agent. The centralized approach could achieve better performance of traffic efficiency with the sacrifice of scheduling flexibility. In contrast, with the decentralized approach [
13], each CAV determines its own control policy based on the information received from other CAVs and roadside infrastructure. Although it is difficult to achieve global optimization due to the lack of overall cooperation among CAVs, the decentralized approach has high flexibility and does not need an extra management agent. Therefore, lots of works have investigated the decentralized approach. The authors in [
13] designed a decentralized model predictive controller (MPC) to control each CAV crossing the intersection area, where a multi-objective function that considers rear-end collision avoidance at control zone and conflict avoidance at intersection zone is set to improve the performance of traffic efficiency, fuel consumption and ride comfort. L. Makarem and D. Gillet [
14] introduced a new decentralized navigation function based on time-to-collision to improve energy consumption and motion smoothness, and showed that the proposed method achieved a significant performance gain over the traffic light scheme. In [
15], a decentralized nonlinear model predictive control (NMPC) is proposed to coordinate the traffic flow of the CAVs, where the trajectory of CAV is obtained by optimizing a quadratic cost function and the crossing priorities are determined by the predicted arrival time or the First-Come First-Served (FCFS) rule. And H. Wei et al. [
16] adopted game theory to avoid predicted collision inside the intersection zone, where a platoon structure formation algorithm was proposed to form coalitions of CAVs as players of the game.
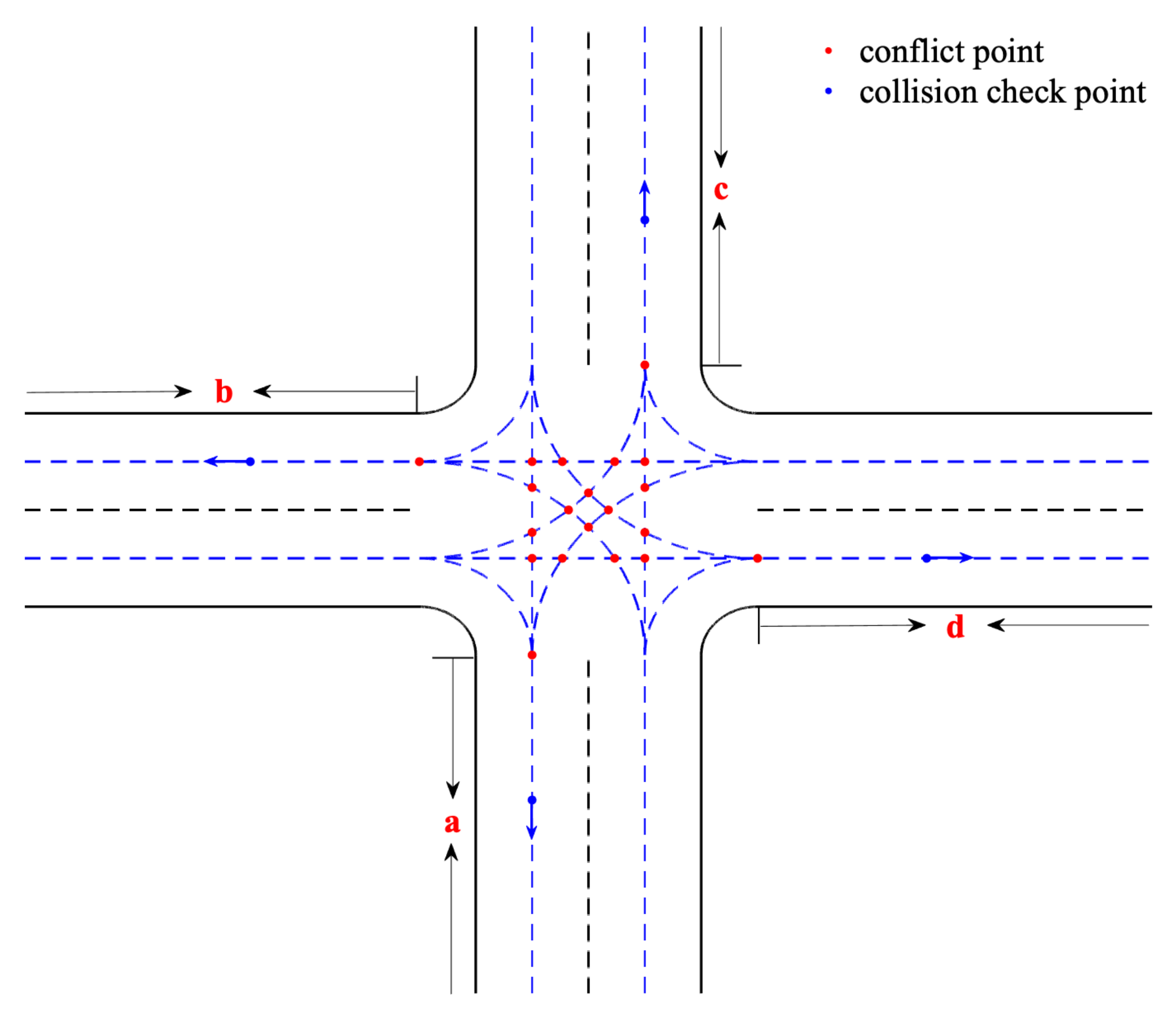
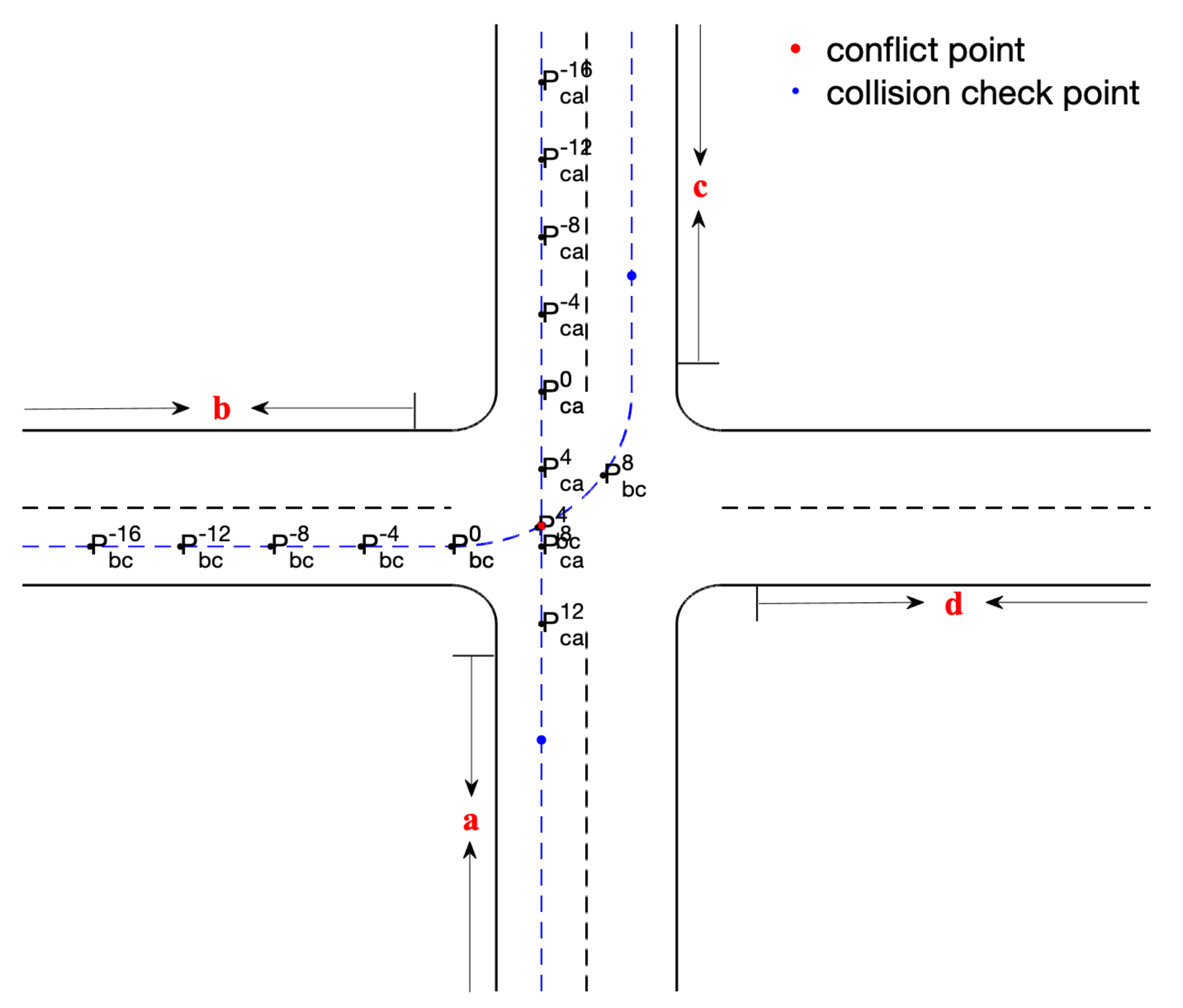
In summary, the existing works on decentralized AIM are mainly on improving the traffic efficiency at intersections and ensuring safety when the CAVs are in the intersection zone. However, the priorities of emergency CAVs and the potential collisions after the CAVs leave the intersection zone were not considered. In this paper, we propose a decentralized AIM to address these issues. First, a priority-based collision-avoidance rule is proposed to improve the performance of traffic efficiency and delays of emergency CAVs. The rule, which considers the arrival time of CAVs to the intersection zone and the emergency level of CAVs, guarantees that the CAVs followed by emergency CAVs and the CAVs that can arrive at intersection zone earlier have higher crossing priorities. Moreover, to ensure the safety of CAVs in the entire intersection area, a novel intersection–vehicle model is proposed, which adopts conflict points to check conflicts in the intersection area and introduces collision check points to check conflicts after that CAVs leave the intersection. Then, the optimal trajectory planning of CAV is obtained by optimizing a multi-objective function, which takes into account the ride comfort, fuel consumption, velocities of CAVs, and the constraints of safety, velocity and acceleration.
The remainder of this paper is organized as follows.
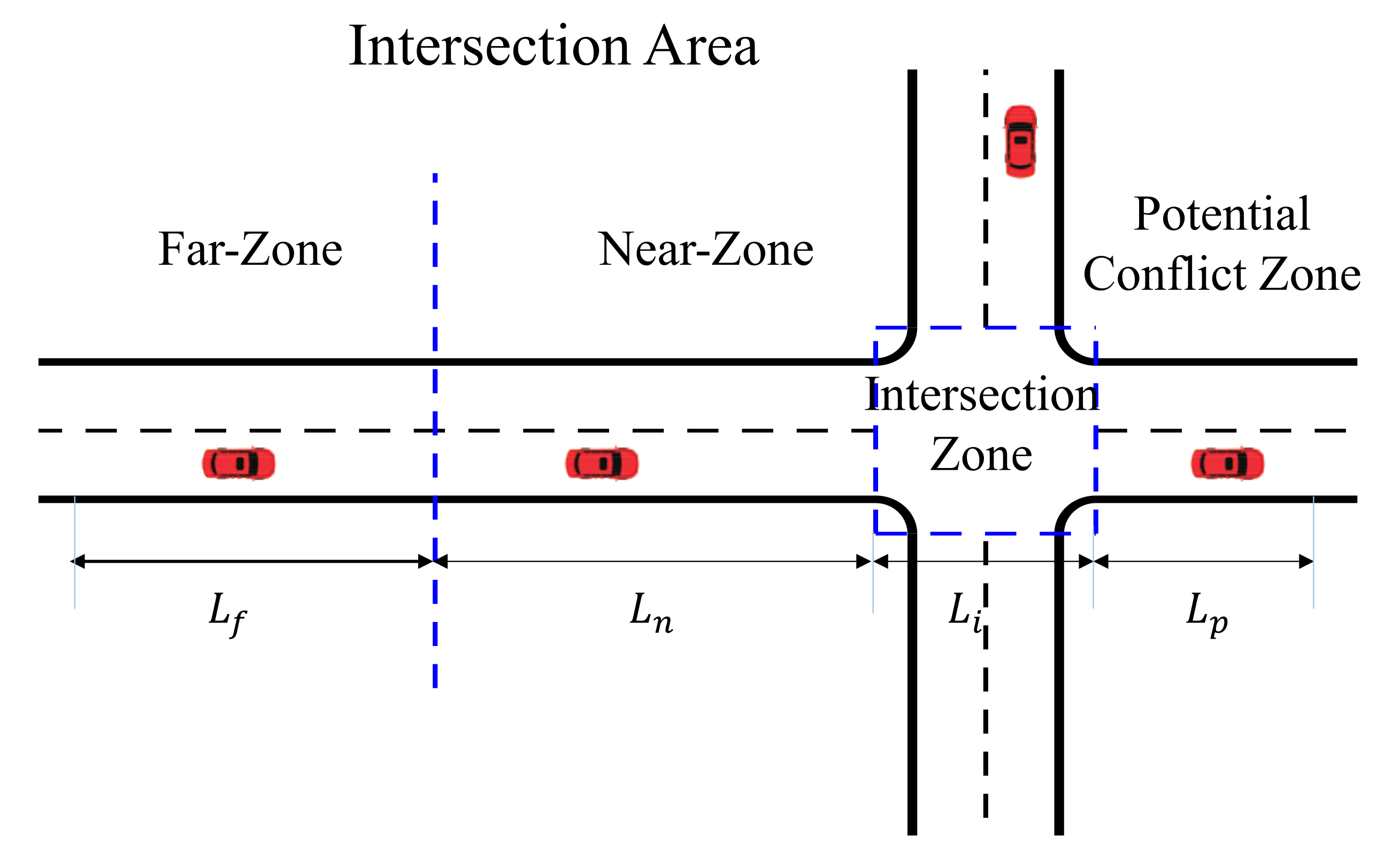
Section 2 presents the intersection–vehicle model. In
Section 3, we propose a priority-based rule to avoid collisions between CAVs. Then,
Section 4 analyzes the optimal trajectory of CAV. Simulation results are presented and evaluated in
Section 5. Finally, some concluding remarks are presented in
Section 4.
3. Scheduling Scheme
When the occupation time of PCZ and conflict points cannot meet the constraints Equations (
3) and (
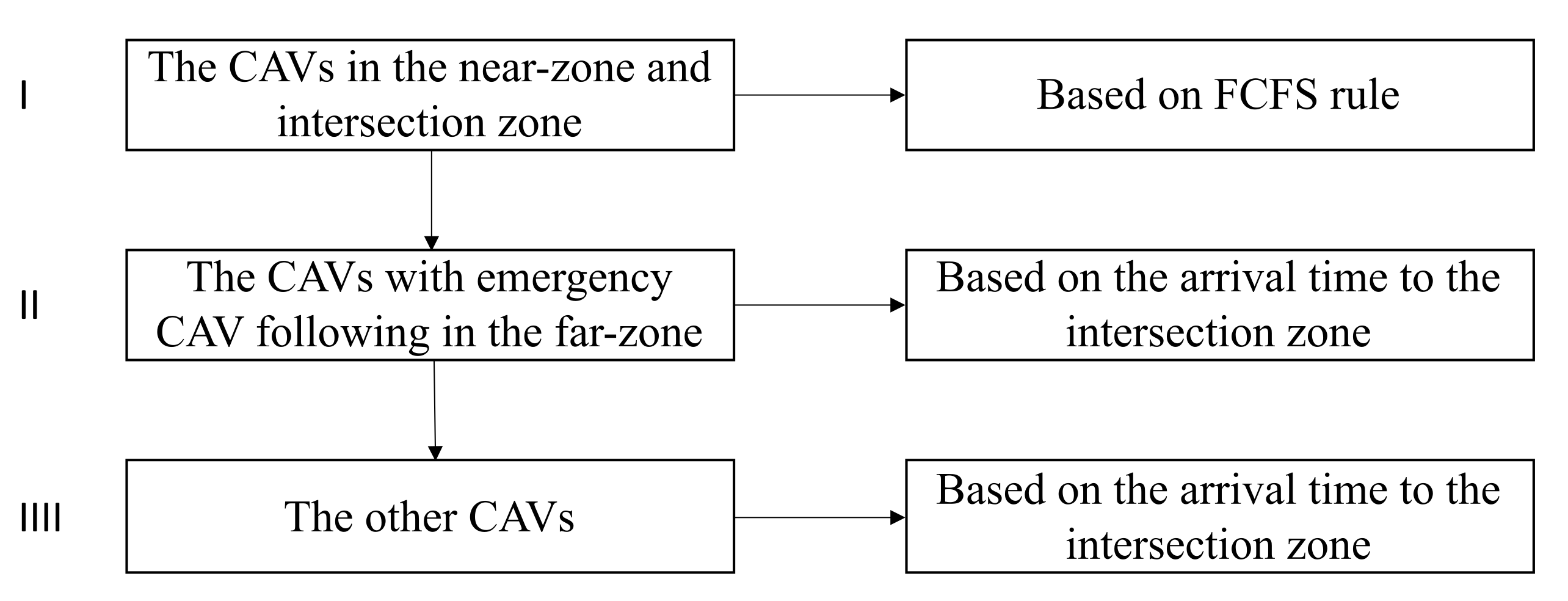
5), the colliding CAVs need to adopt measures to avoid collision. In this section, we proposed a priority-based avoidance rule to determine the crossing order of CAVs. As the CAVs cross the IZ with high velocity can reduce the occupancy time of conflict points and as a result improve the traffic efficiency, the CAVs should try to drive through the IZ and PCZ with as high velocities as possible. In addition, CAVs followed by emergency CAVs should pass the intersection with high priorities, to decrease the crossing delay of emergency CAVs. Therefore, based on the arrival time to the IZ and the emergency level of CAVs, we proposed a three-level priority rule to improve the traffic efficiency and shorten the delays of emergency CAVs as shown in
Figure 4.
The first level includes the CAVs in the near zone and IZ. Their priorities are determined based on the FCFS rule, which means that the CAVs driving into the near zone later need to avoid the CAVs that arrive earlier. This strategy will guarantee that the CAVs close to the IZ do not decelerate suddenly to avoid other CAVs, so as to decrease the occupation time of IZ.
The second level includes the CAVs followed by emergency CAVs in the far zone. Their priorities are determined based on the arrival time to the IZ. When an emergency CAV heads into the far zone, the priorities of the CAVs in front of this emergency CAV will be elevated to this level. Then, CAVs will reschedule their arrival time to the IZ taking into account the CAVs that have higher priorities. The new arrival time will be broadcasted by V2X communications. This strategy will guarantee that the emergency CAVs have short crossing delays.
The rest CAVs will be sorted into the third level whose priorities are the lowest. The priorities of CAVs at this level are also determined based on the arrival time to the IZ. In other words, these CAVs will make sacrifices to avoid emergency CAVs and the CAVs that can arrive at IZ earlier, to improve the traffic efficiency and shorten the delays of emergency CAVs.
4. The Decentralized Control Algorithm
Based on the avoidance rule proposed in Section III, CAVs can make their optimal trajectory planning that meet the relevant constraints. In this section, a decentralized control algorithm is proposed to obtain optimal trajectory planning of CAVs. In particular, we set a multi-objective function, which considers the velocity, ride comfort and fuel consumption of CAVs. Then, by optimizing the multi-objective function with the penalty function method, the optimal input of ego-CAV can be obtained.
4.1. Multi-Objective Function Design
The most critical task for intersection management is to ensure safety, which has been mentioned in the previous sections. Moreover, the performance of velocity, fuel consumption and ride comfort of CAV should also be considered. It is better for CAVs to drive through the intersection area with a short duration, low fuel consumption and good ride comfort.
4.1.1. The Velocity Objective
CAVs with high velocity means low traffic delays, so CAVs should pilot with desired velocity as soon as possible. In addition, CAVs with high velocity in the IZ can reduce the occupation time of IZ, to improve the traffic efficiency of intersections. It means that high velocity in the IZ is more significant than that in other zones. Thus, we set the velocity objective as
where
and
are the velocity weight factors of non-IZ and IZ, and
p,
K, and
E are the position order of ego-CAV’s current location, the last conflict point and the collision check point on its path.
4.1.2. The Fuel Consumption Objective
The fuel consumption of CAV is related to its velocity and acceleration. By referring to [
17], the fuel consumption objective is expressed as
where
is the weight factor of fuel consumption,
and
are the coefficients to calculate fuel consumption.
4.1.3. The Ride Comfort Objective
The ride comfort of CAV is mainly related to its acceleration/deceleration and the fluctuation of acceleration/deceleration. The ride comfort objective is described as
where
is the fluctuation of acceleration/deceleration,
and
are the ride comfort weight factors.
In summary, the multi-objective function for ego-CAV can be expressed as
4.2. Penalty Function Method
To obtain the optimal input
of CAV, we adopted the penalty function method to optimize the multi-objective function as described by Equation (
13). Assuming there are
M CAVs whose priorities are higher than that of CAV
, among which there are
CAVs that have the same exit with CAV
. Let
represent the
m-th CAV’s occupation time of the
j-th conflict point, and let
represent the
n-th CAV’s occupation time of PCZ. The constraints can be transferred as penalty items, which is described as
where
is the penalty factor
and
are the left and right endpoints of the interval
.
and
are the left and right endpoints of the interval
.
N1 = 20 is the number of conflict points. Therefore, the multi-objective function with constraints can be transferred as a multi-objective function without constraints
Then, by optimizing Equation (
15), the optimal input
of ego-CAV can be obtained.
5. Simulation Results
In this section, simulation is performed with MATLAB. And the centralized reservation scheme [
12], the decentralized MPC-based scheme [
13] and the traditional traffic light scheme are presented to compare with the proposed AIM scheme. In the simulation, the arrival rate of CAVs at each lane is assumed to be a Poisson process with the same average value
. In addition,
and
of CAVs will go straight, turn right, and turn left at the intersection for each lane, respectively. Assuming that CAVs pilot with traffic-flow model [
18] before arriving at the intersection area. In addition, each CAV need to share its information periodically including emergency level, size, predicted occupation time of conflict points and PCZ etc. Then, CAVs can determine the crossing order according to the proposed priority rule and optimize their trajectory planning according to the proposed control algorithm periodically. As the total number of CAVs is fixed within given simulation time, the traffic efficiency and traffic delays can be determined for each scheme. The model parameters are set according to practical considerations, which are listed in
Table 1 in detail.
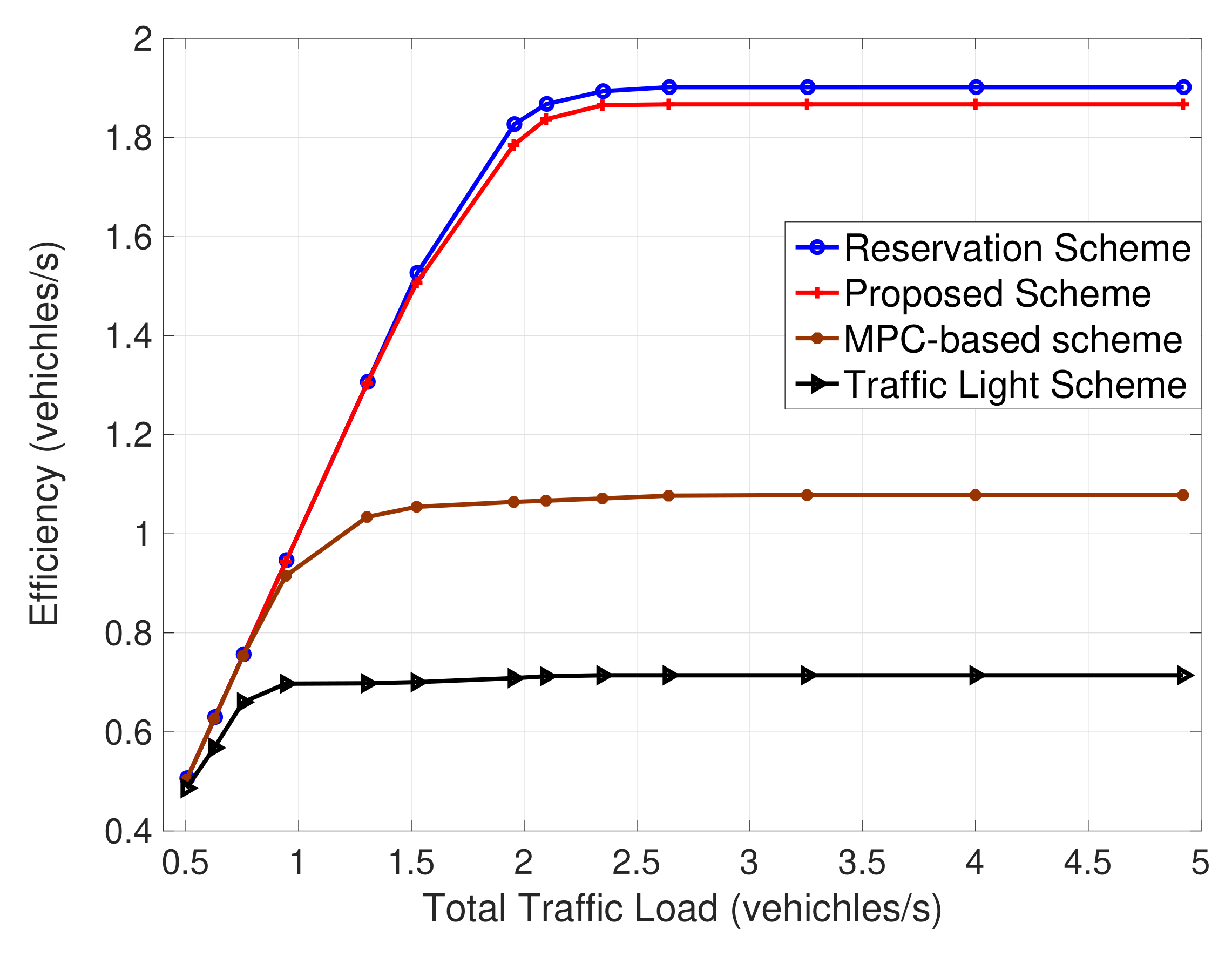
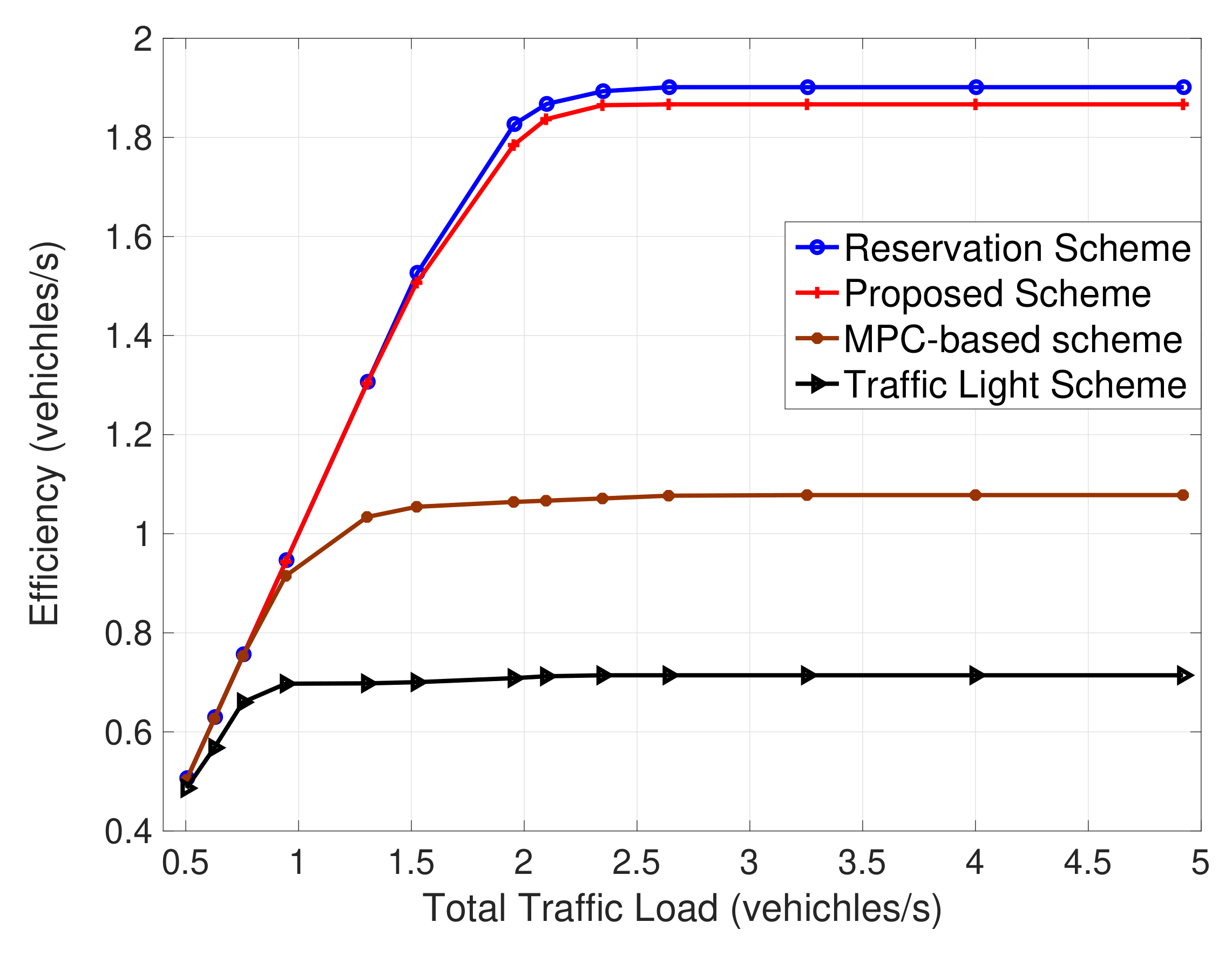
In
Figure 5, we compare the traffic efficiency under different schemes for different traffic loads. As we can see, the traffic efficiency of the proposed scheme is similar to that of the centralized reservation scheme, and the maximum traffic efficiency of the proposed scheme can be increased by about 70% as compared with that of the decentralized MPC-based scheme. This demonstrates that our proposed scheme can achieve high traffic efficiency. This is because that the proposed scheme guarantees that the CAVs can drive through the IZ with high velocity and the CAVs whose arrival time to the IZ are earlier will be assigned with higher crossing priorities.
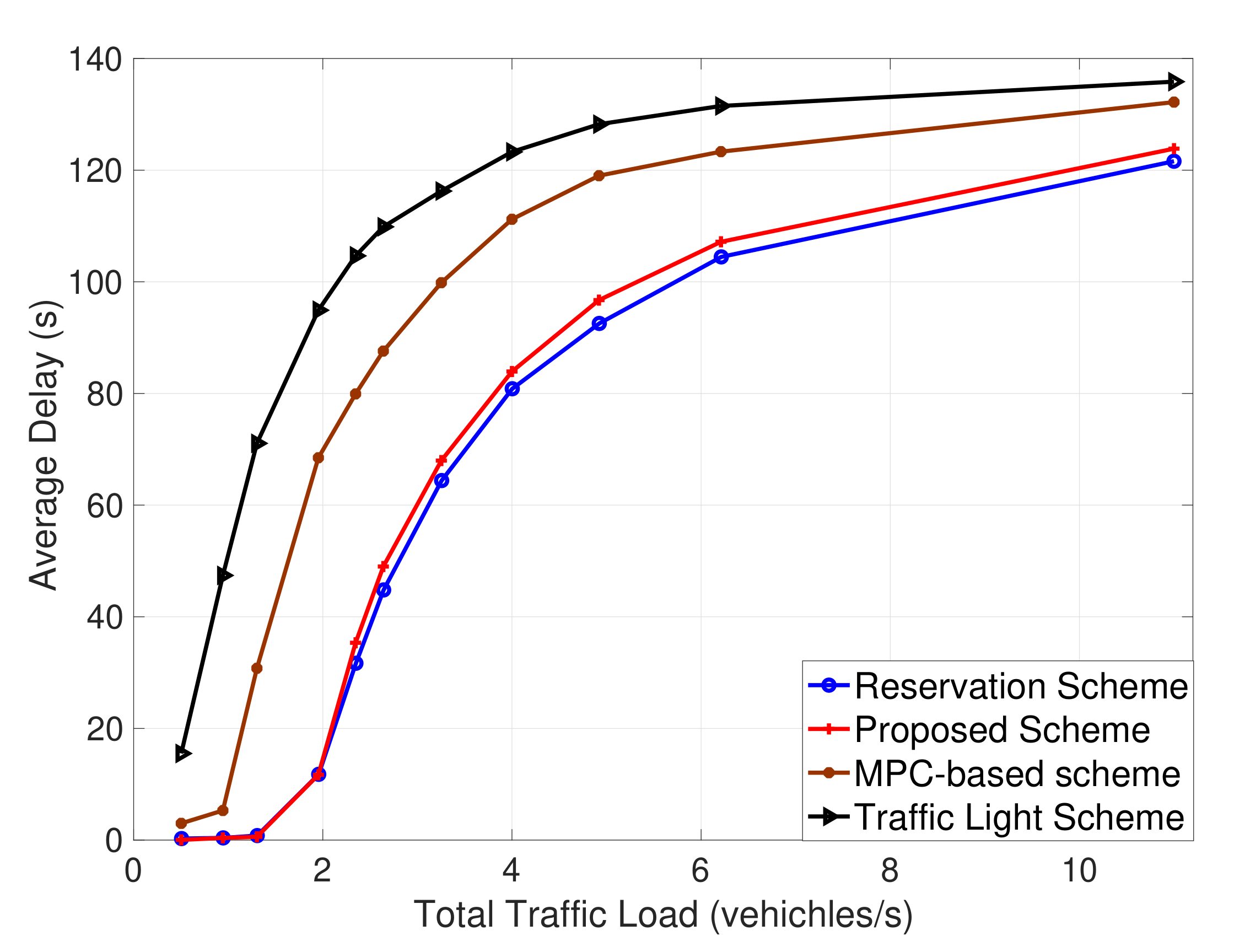
Figure 6 shows the average delay of the passed CAVs at different total traffic load under different schemes. It can be seen that the average delay will increase as the traffic load increases, and the average delay of the proposed scheme is slightly bigger than that of the reservation scheme and much smaller than that of the MPC-based scheme. This is in accordance with the traffic efficiency as shown is
Figure 5.
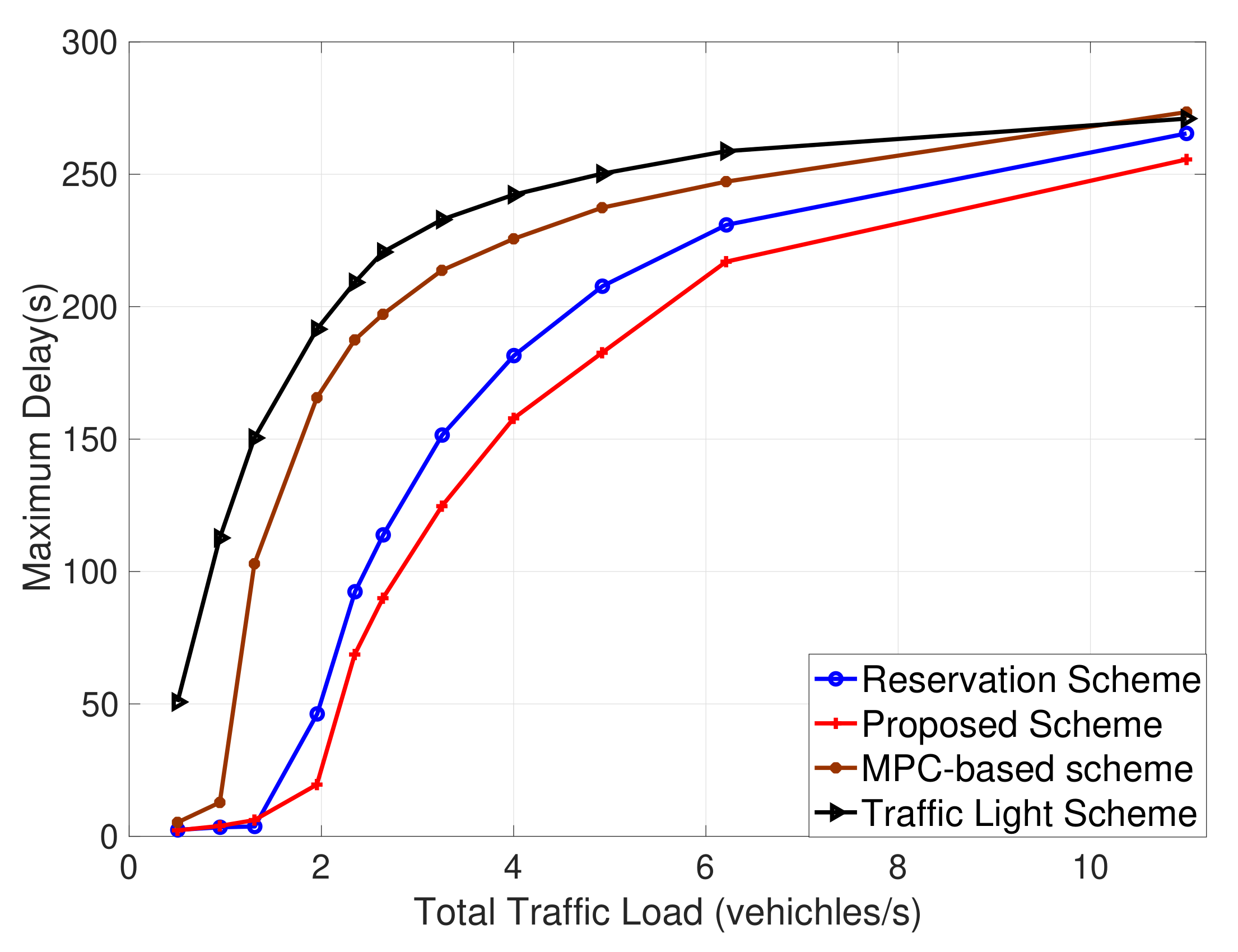
Figure 7 shows that the maximum delay of the passed CAVs at different total traffic load under different schemes. It can be seen that the maximum delay of the passed CAVs will increase as the traffic load increases. In addition, our proposed scheme has lower maximum delay compared with the other schemes, which means that the proposed scheme has better crossing fairness. This is because that the crossing order of the proposed scheme is mainly determined by the arrival time to IZ other than the FCFS rule. Thus, the CAVs that drive into intersection area at a later time but can arrive at IZ earlier could be assigned with higher crossing priorities.
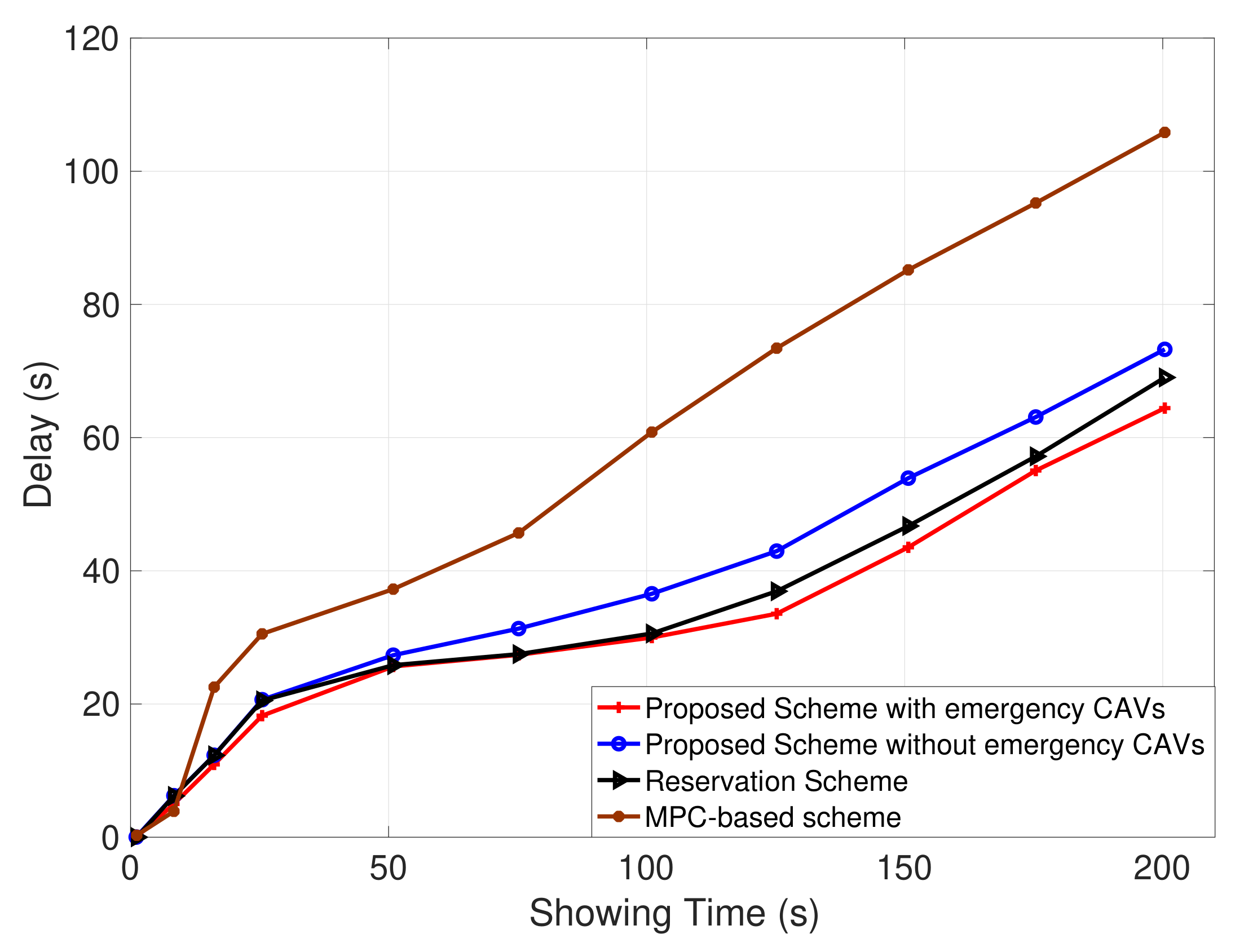
To demonstrate the superiority of the emergency CAVs in the proposed scheme, the delays of the emergency CAVs with different arrival time to the intersection area are presented in
Figure 8. As we can see, when these emergency CAVs are labeled in our proposed scheme, they have shorter delays than when they are not labeled, which verifies that our proposed scheme can handle the emergency CAVs with higher priorities. The reason is that the CAVs followed by emergency CAVs in the far zone are assigned with higher crossing priorities in our proposed scheme.
6. Conclusions and Outlook
In this paper, we investigated the autonomous intersection management problem with CAVs. To this end, we first proposed a novel intersection–vehicle model, which can consider all possible collisions of CAVs in the intersection area. Then, to avoid conflicts between CAVs, a priority-based avoidance rule was presented to improve the traffic efficiency and emergency CAVs delays. Finally, based on the model and the avoidance rule, we set a multi-objective function to design the optimal trajectories of CAVs. Through extensive simulations, the performance of the proposed scheme was compared with the centralized reservation scheme, the decentralized MPC-based scheme and the traffic light scheme. Simulation results verified that our proposed scheme can achieve good performance in terms of both traffic efficiency and flexibility in shortening the delays of emergency CAVs.
This article only showed that the proposed decentralized scheme has better performance than some other schemes by simulations with given model parameters. As CAVs cross the intersection with high velocity in the proposed scheme, potential collisions could happen by any deviations from the model assumption in realistic scenarios. Thus, as the next important step, the parameter values need to be further explored to make sure that CAVs can cross the intersection area even with minor errors. Moreover, It is also an interesting topic to extend this scheme to the scenarios of multiple intersections and mixed traffics of autonomous and human-driven vehicles.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}