
Artificial Neural Network Prediction of the Optimal Setup Parameters of a Seven Degrees of Freedom Mathematical Model of a Race Car: IndyCar Case Study

 ,
,  ,
,
Abstract
:1. Introduction
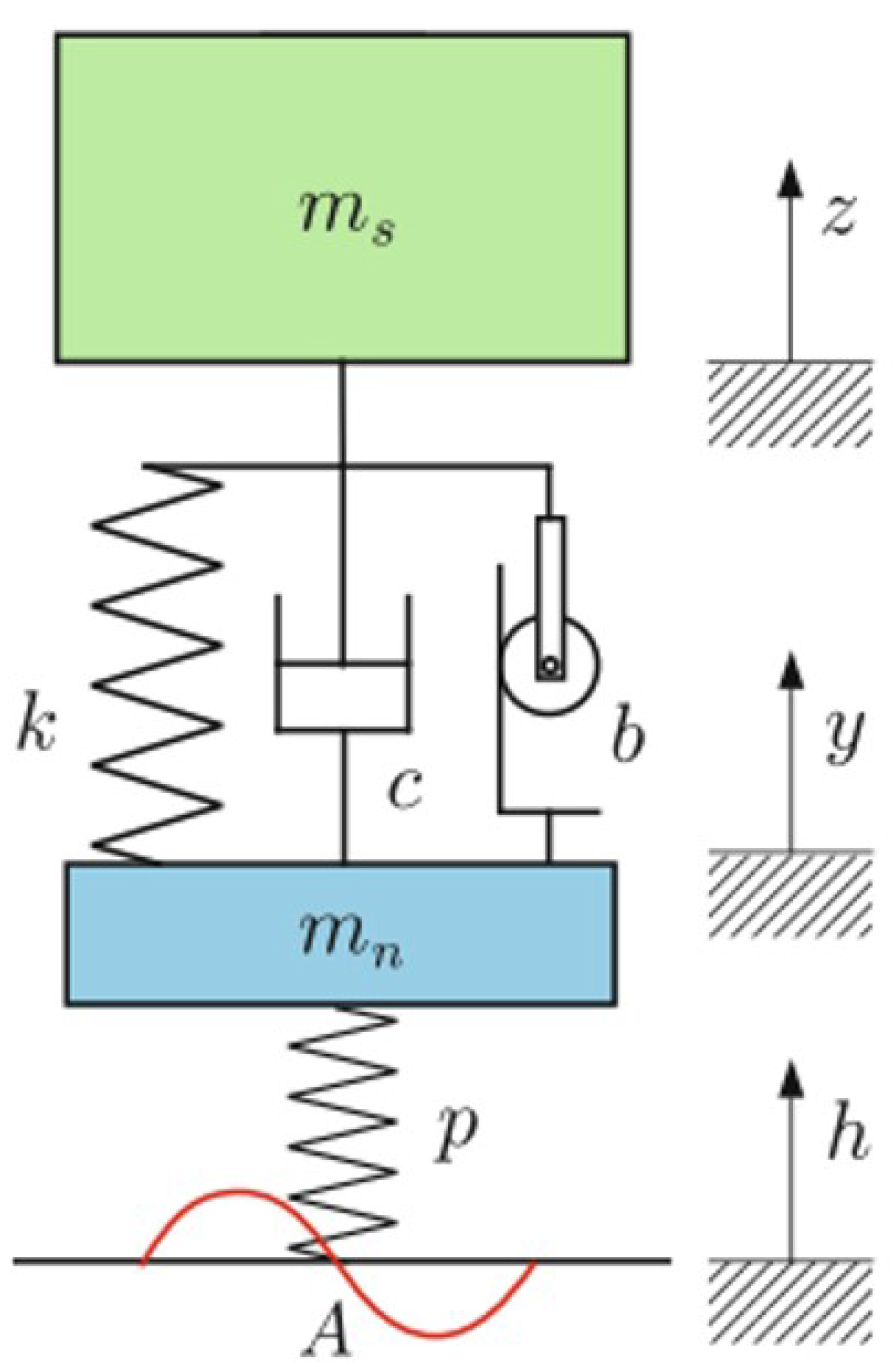
- It only takes into consideration the heave motion of the system without studying the body motion of the roll, pitch and yaw;
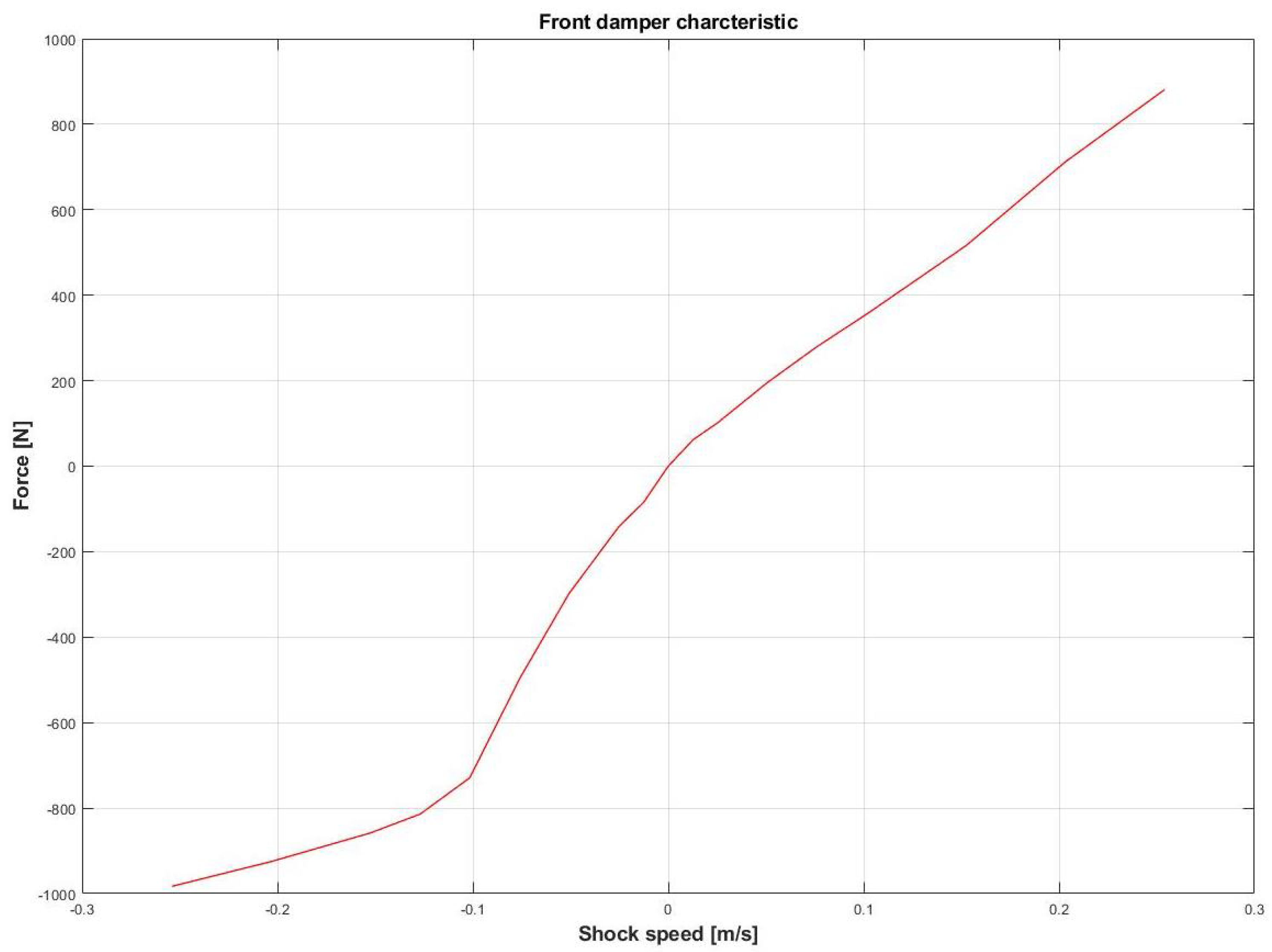
- The system is assumed to be linear but in reality, considering for example the shock absorbers or the bump stops characteristics, is strongly nonlinear;
- It does not take into consideration the geometrical effect of having four wheels.
2. Theoretical Background
- What is meant by setup parameters, and which ones are available for this study;
- The mathematical relation between the setup parameters and the information we can extract to characterize the behavior of a vehicle during a lap;
- The effects that change these parameters have on vehicle performance.
2.1. Setup Parameters
- After the chassis is manufactured, its geometry cannot be changed. For this reason, it is not possible to change the wheelbase, track width and all the other parameters related to vehicle geometry;
- Tires are imposed by the regulation; hence, it is not possible to change all the parameters related to the tire, such as tire stiffness and damping;
- Motion Ratio (MR) is a characteristic provided by the manufacturer and cannot be changed.
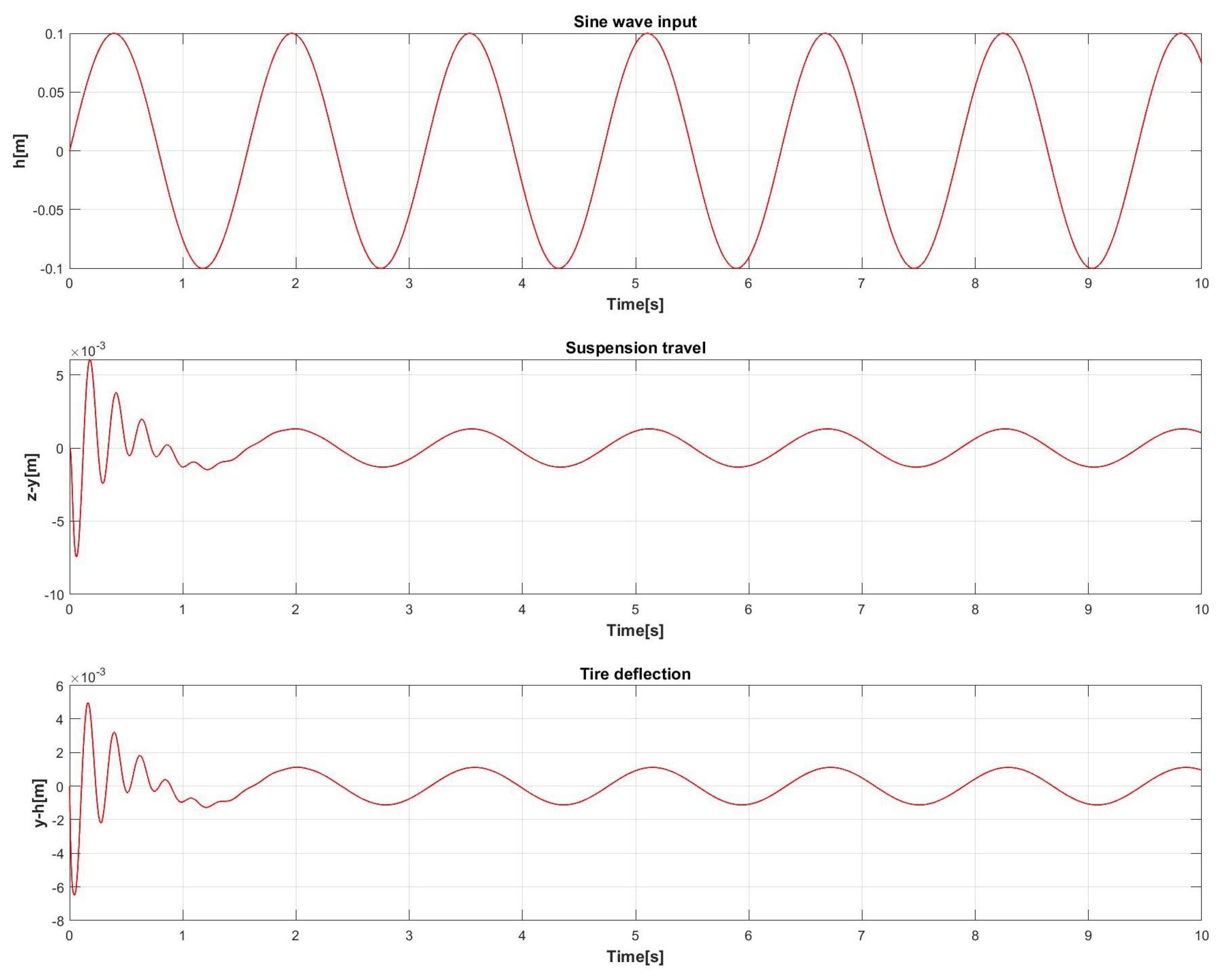
2.2. Quarter Car Model
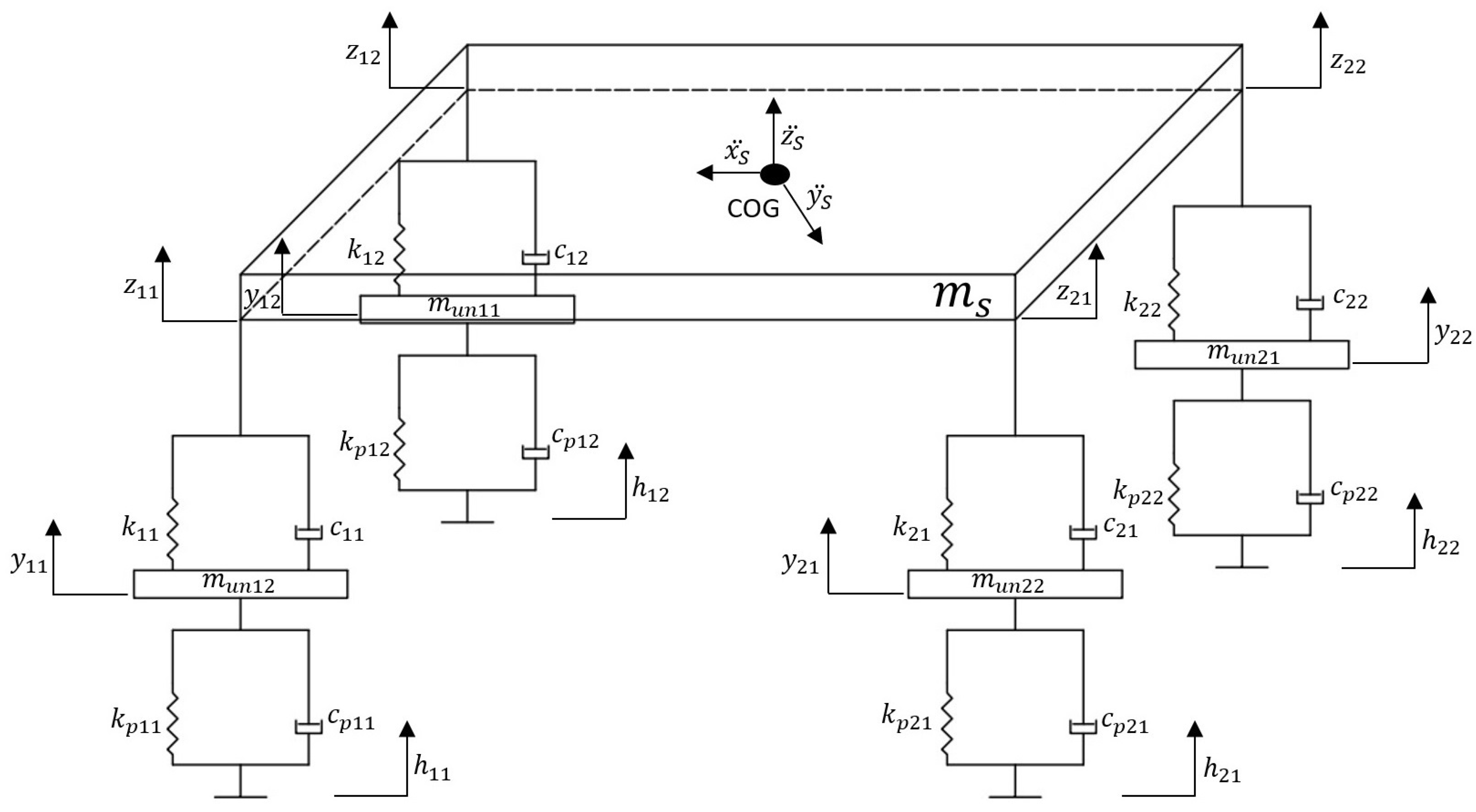
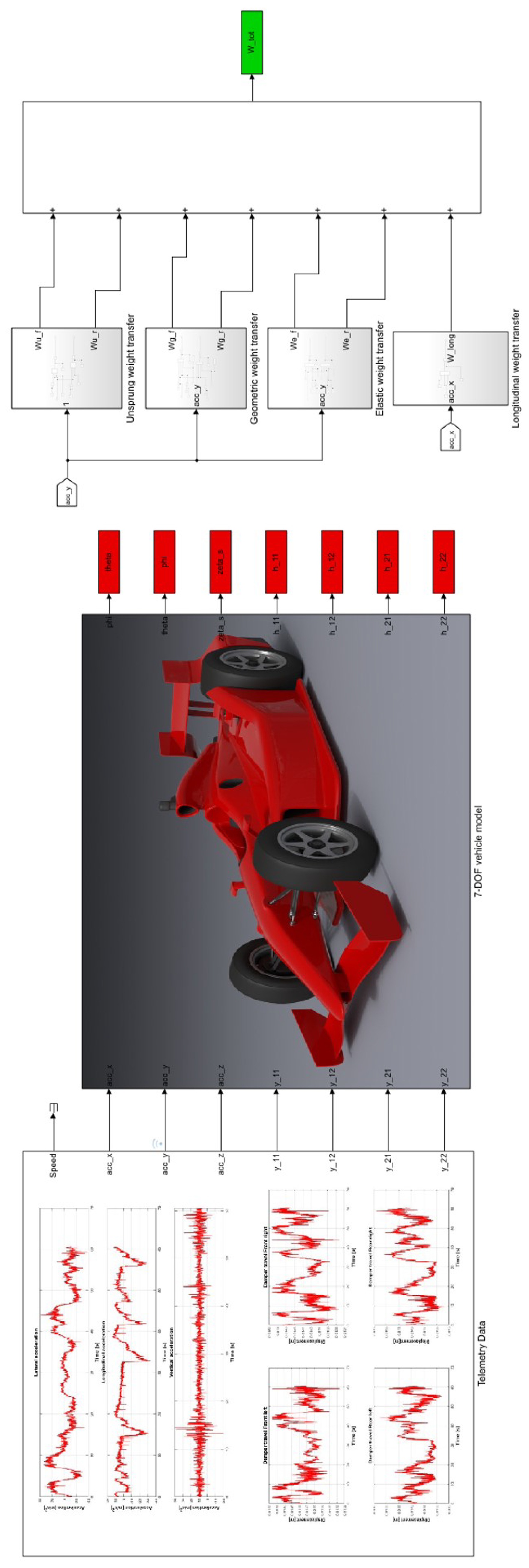
2.3. 7-DOF Model
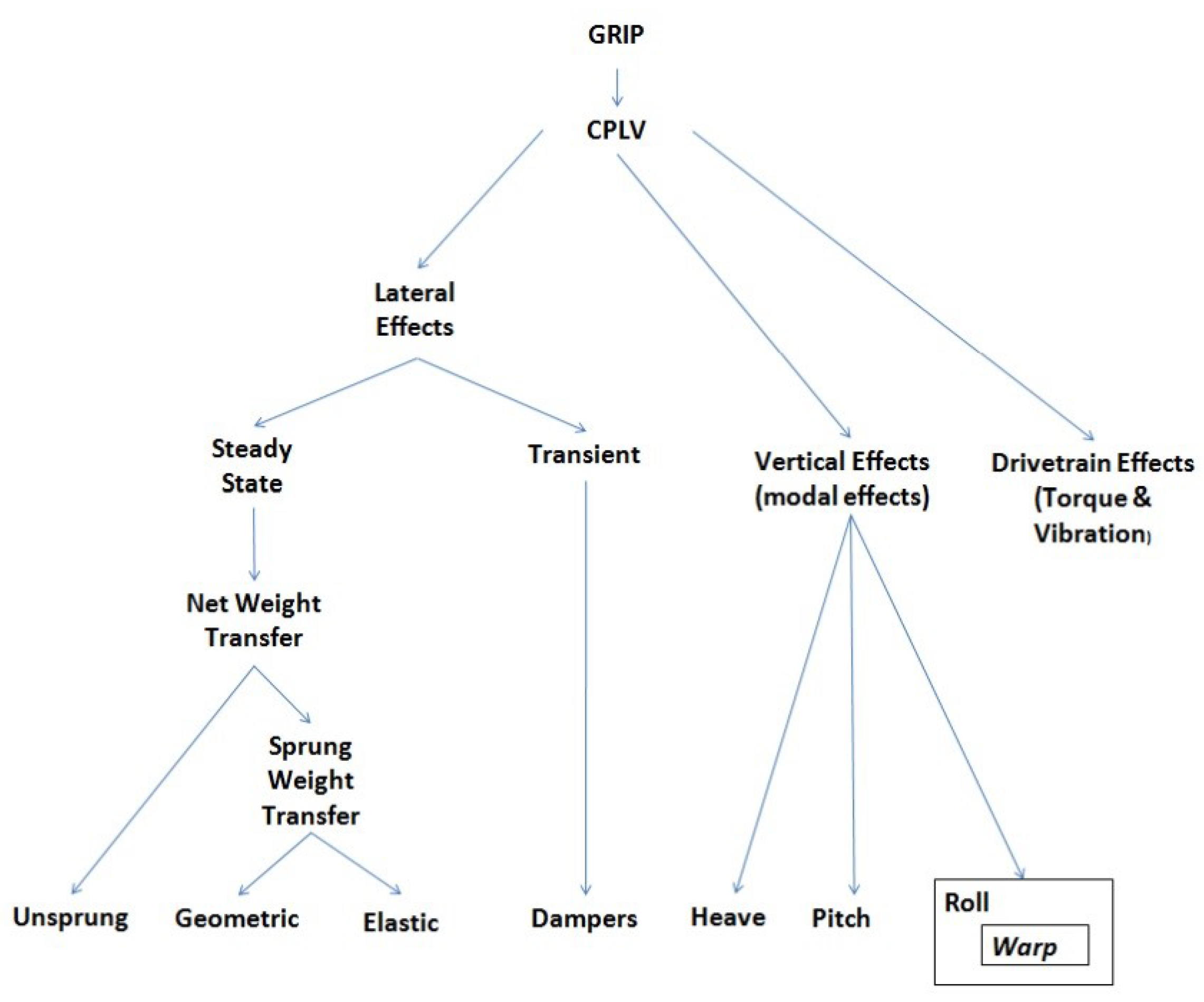
2.4. Grip Effect
3. Related Work
4. The Proposed Method
5. Empirical Research Methodology
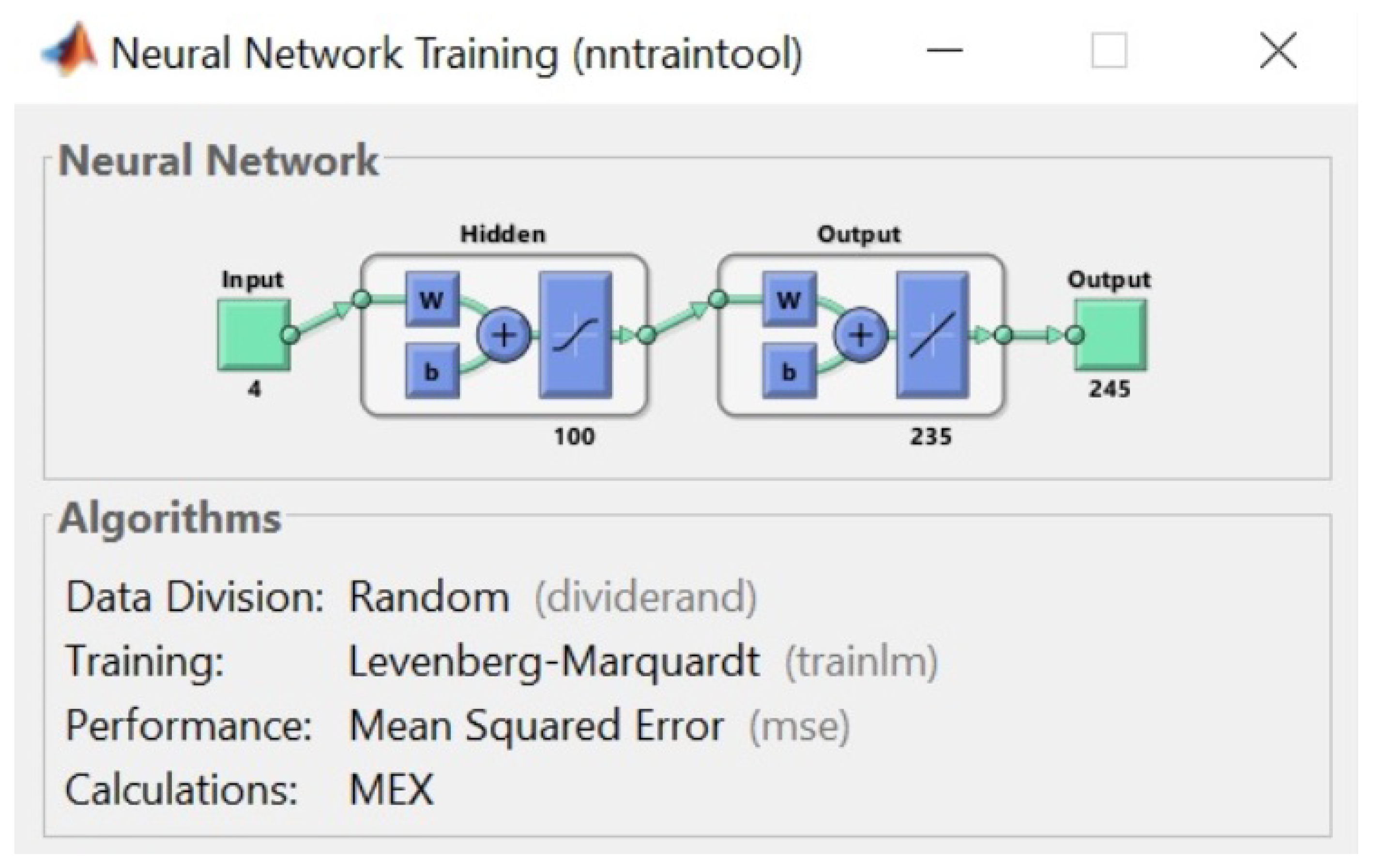
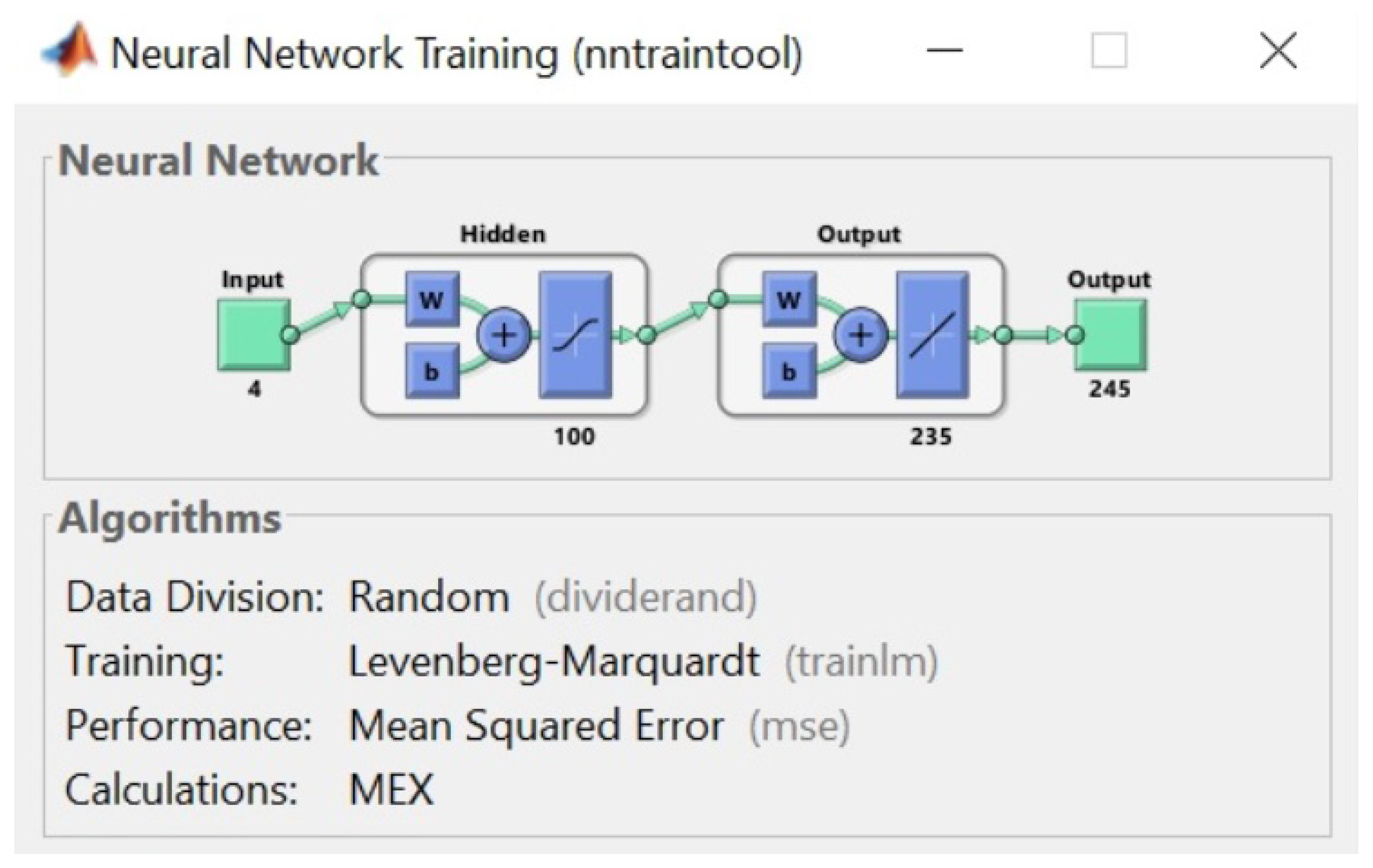
- Four input layers: roll angle, pitch angle, sprung mass vertical travel and total weight transfer vectors;
- Two-hundred-and-forty-five output layers: contains, in order, the vectors of the designated optimization variables;
- Hidden layer: 100 neurons.
6. Results
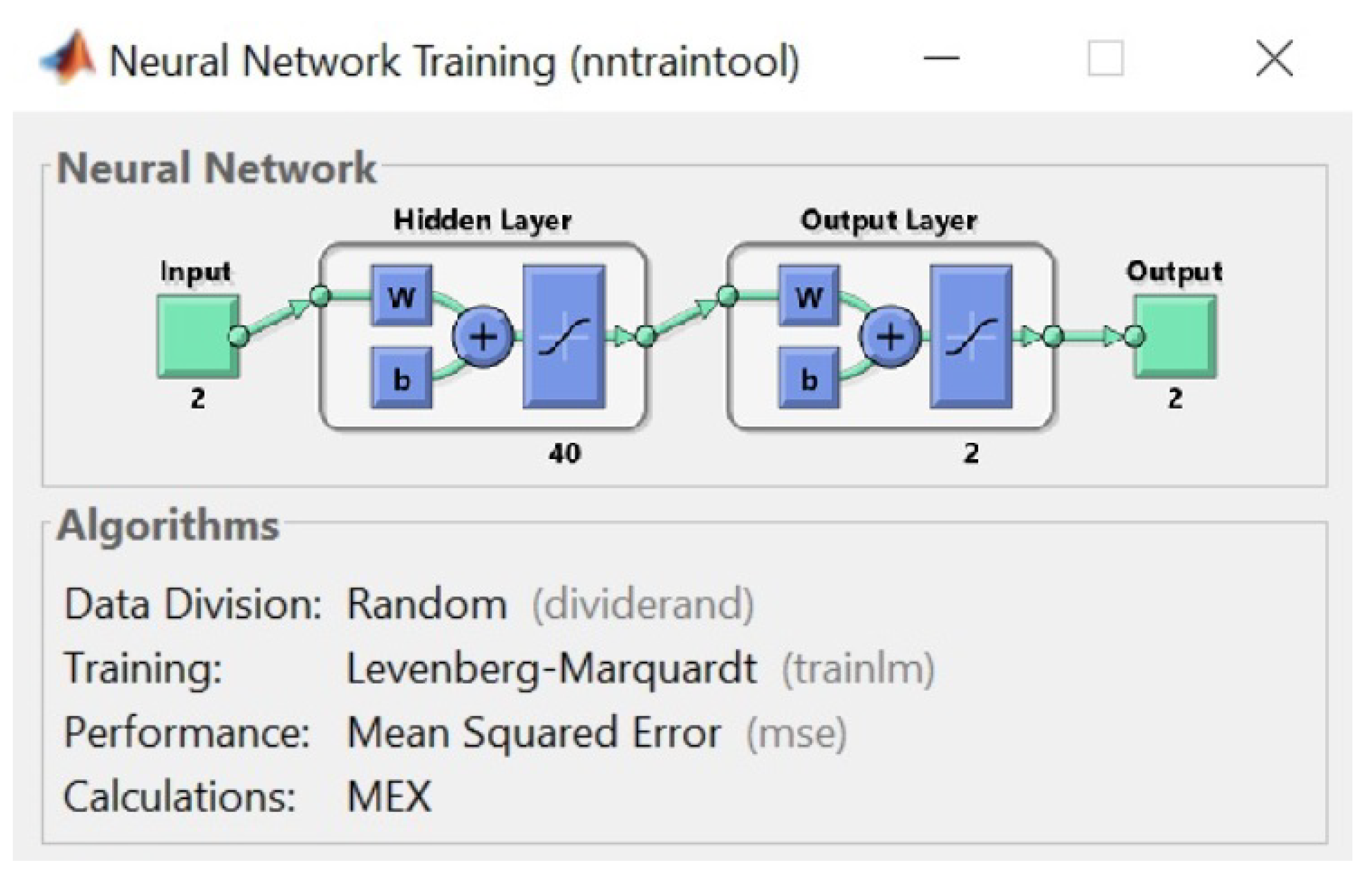
6.1. Quarter Car Model
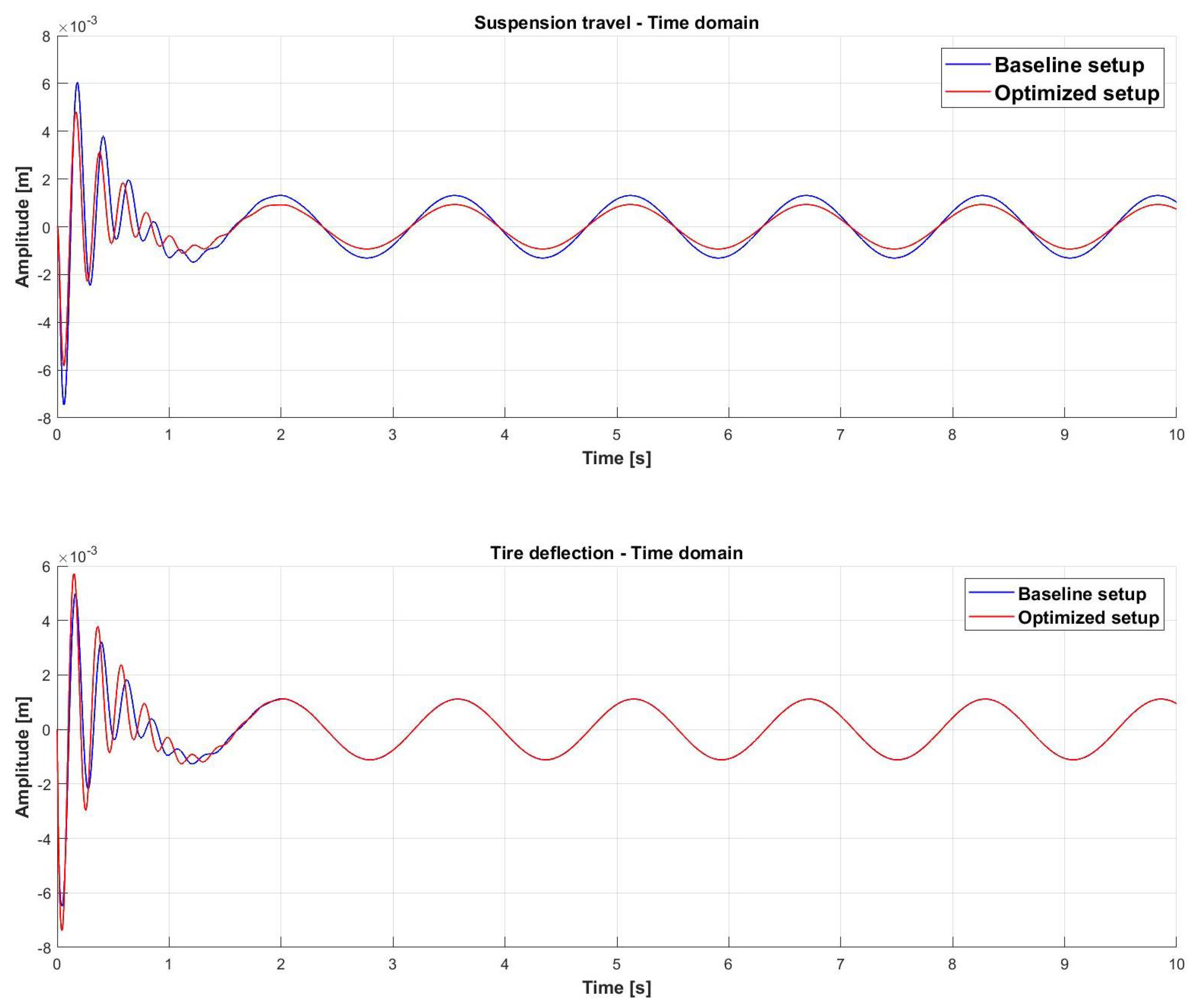
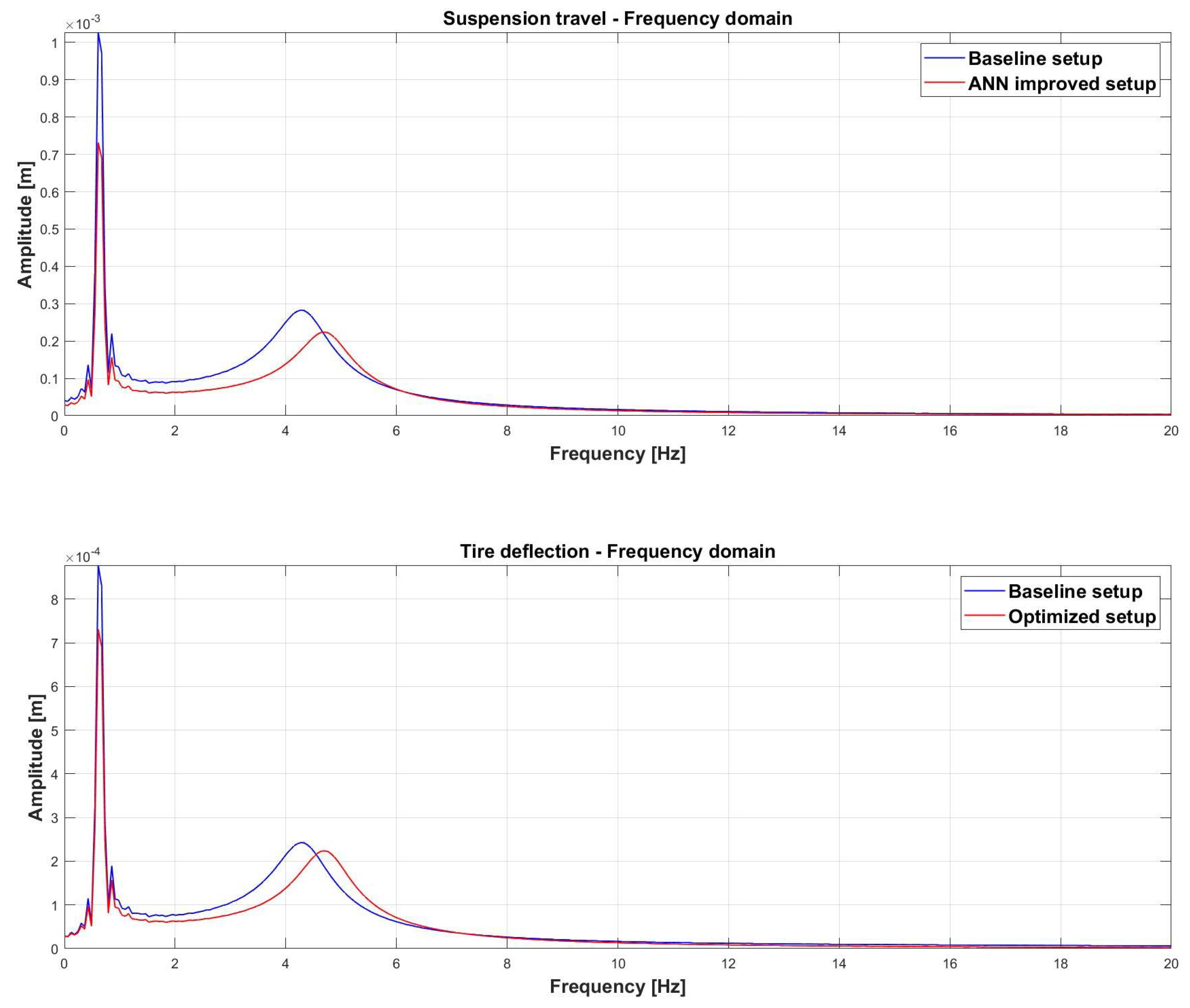
6.2. 7-DOF Model
7. Discussion
8. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| m | Total vehicle mass [kg] |
| Sprung mass [kg] | |
| Front sprung mass [kg] | |
| Rear sprung mass [kg] | |
| Unsprung mass [kg] | |
| l | Wheelbase [m] |
| Front wheelbase [m] | |
| Rear wheelbase [m] | |
| Front track width [m] | |
| Rear track width [m] | |
| h | Center Of Gravity height [m] |
| Front dynamic tire radius [m] | |
| rear dynamic tire radius [m] | |
| Front no-roll center [m] | |
| Rear no-roll center [m] | |
| b | Pitch center height [m] |
| Height of no-roll axis under the COG [m] | |
| Rolling stiffness on front axle [Nm/deg roll] | |
| Rolling stiffness on rear axle [Nm/deg roll] | |
| Front Anti-Roll bar stiffness at the wheel [N/m] | |
| Rear Anti-Roll bar stiffness at the wheel [N/m] | |
| Front left spring rate [N/m] | |
| Front right spring rate [N/m] | |
| Rear left spring rate [N/m] | |
| Rear right spring rate [N/m] | |
| Front left damping rate [Ns/m] | |
| Front right damping rate [Ns/m] | |
| Rear left damping rate [Ns/m] | |
| Rear right damping rate [Ns/m] | |
| Front left tire vertical stiffness [N/m] | |
| Front right tire vertical stiffness [N/m] | |
| Rear left tire vertical stiffness [N/m] | |
| Rear right tire vertical stiffness [N/m] | |
| Front left tire vertical damping [Ns/m] | |
| Front right tire vertical damping [Ns/m] | |
| Rear left tire vertical damping [Ns/m] | |
| Rear right tire vertical damping [Ns/m] | |
| Roll inertia [kgm] | |
| Pitch inertia [kgm] | |
| Front damper motion ratio [-] | |
| Rear damper motion ratio [-] | |
| Front spring motion ratio [-] | |
| Rear spring motion ratio [-] | |
| Front Anti-Roll bar motion ratio [-] | |
| Rear Anti-roll bar motion ratio [-] |
References
- Guiggiani, M. The Science of Vehicle Dynamics: Handling, Braking, and Ride of Road and Race Cars; Springer: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Sun, T.; Zhang, Y.; Barak, P. 4-DOF Vehicle Ride Model; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2002. [Google Scholar] [CrossRef]
- Dumitriu, D. Car vertical dynamics 3d simulator using a 7 dof model. Acta Tech. Napoc. Ser. Appl. Math. Mech. Eng. 2012, 55, 647–650. [Google Scholar]
- Setiawan, J.D.; Safarudin, M.; Singh, A. Modeling, simulation and validation of 14 DOF full vehicle model. In Proceedings of the International Conference on Instrumentation, Communication, Information Technology, and Biomedical Engineering 2009, Bandung, Indonesia, 23–25 November 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Cambiaghi, D.; Gadola, M.; Vetturi, D. Suspension System Testing and Tuning with the Use of a Four-Post Rig; SAE Technical Paper; SAE International: Warrendale, PA, USA, 1998. [Google Scholar] [CrossRef]
- Kowalczyk, H. Damper Tuning with the Use of a Seven Post Shaker Rig; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2002. [Google Scholar] [CrossRef]
- Kelly, J.; Kowalczyk, H.; Oral, H.A. Track Simulation and Vehicle Characterization with 7 Post Testing; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2002. [Google Scholar] [CrossRef]
- Chan, B.; Sandu, C. Development of a Virtual 7-Post Test Rig for Experimental Validation. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Chicago, IL, USA, 5–10 November 2006. [Google Scholar]
- Southward, S.C.; Boggs, C.M. Comparison of the Performance of 7-Post and 8-Post Dynamic Shaker Rigs for Vehicle Dynamics Studies. SAE Int. J. Passeng. Cars Mech. Syst. 2008, 1, 1319–1324. [Google Scholar] [CrossRef]
- Alander, J. On optimal population size of genetic algorithms. In Proceedings of the 1992 Proceedings Computer Systems and Software Engineering, The Hague, The Netherlands, 4–8 May 1992; IEEE Computer Society: Los Alamitos, CA, USA, 1992; pp. 65–70. [Google Scholar] [CrossRef]
- Segers, J. Analysis Techniques for Racecar Data Acquisition, 2nd ed.; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Guarneri, P.; Rocca, G.; Gobbi, M. A Neural-Network-Based Model for the Dynamic Simulation of the Tire/Suspension System While Traversing Road Irregularities. IEEE Trans. Neural Netw. 2008, 19, 1549–1563. [Google Scholar] [CrossRef] [PubMed]
- Guclu, R.; Gulez, K. Neural network control of seat vibrations of a non-linear full vehicle model using PMSM. Math. Comput. Model. 2008, 47, 1356–1371. [Google Scholar] [CrossRef]
- Safari, A.; Mehralian, S.; Teshnehlab, M. Full-Car Active Suspension System Identification Using Flexible Deep Neural Network. In Proceedings of the 2020 8th Iranian Joint Congress on Fuzzy and intelligent Systems (CFIS), Mashhad, Iran, 2–4 September 2020; pp. 191–198. [Google Scholar] [CrossRef]
- Nagarkar, M.; Elgohary, M.; Bhalerao, Y.; Patil, G.; Patil, R. Artificial neural network predication and validation of optimum suspension parameters of a passive suspension system. SN Appl. Sci. 2019, 1, 1–17. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Value |
|---|---|
| Wheelbase l | 3.084 m |
| Front wheelbase | 1.8 m |
| Rear wheelbase | 1.248 m |
| Front track width | 1.7 m |
| Rear track width | 1.58 m |
| Center of gravity height h | 0.30 m |
| Pitch center height b | 0.15 m |
| Vehicle mass m | 673.44 kg |
| Front tire mass | 29.4 kg |
| Rear tire mass | 33.7 kg |
| x-axis inertia | 120 kgm |
| y-axis inertia | 854.34 kgm |
| Front tire stiffness | 294,737 N/m |
| Rear tire stiffness | 276,174 N/m |
| Tire damping | 2000 Ns/m |
| Front dynamic tire radius | 0.66 m |
| Rear dynamic tire radius | 0.7 m |
| Front anti-roll bar ground stiffness | 24,525 N/m |
| Rear anti-roll bar ground stiffness | 26,487 N/m |
| Front roll stiffness | 3297.5 Nm/deg |
| Rear roll stiffness | 2270.5 Nm/deg |
| Front damper motion ratio | 0.994 |
| Rear damper motion ratio | 1.298 |
| Front spring motion ratio | 0.8 |
| Rear spring motion ratio | 0.9 |
| Front anti-roll bar motion ratio | 1.70 |
| Rear anti-roll bar motion ratio | 1.70 |
| Variable | Value |
|---|---|
| Center of gravity height h | 0.30 m |
| Front roll stiffness | 3297.5 Nm/deg |
| Rear roll stiffness | 2270.5 Nm/deg |
| Variable | Unit |
|---|---|
| Roll angle | deg |
| Pitch angle | deg |
| Sprung mass vertical travel | m |
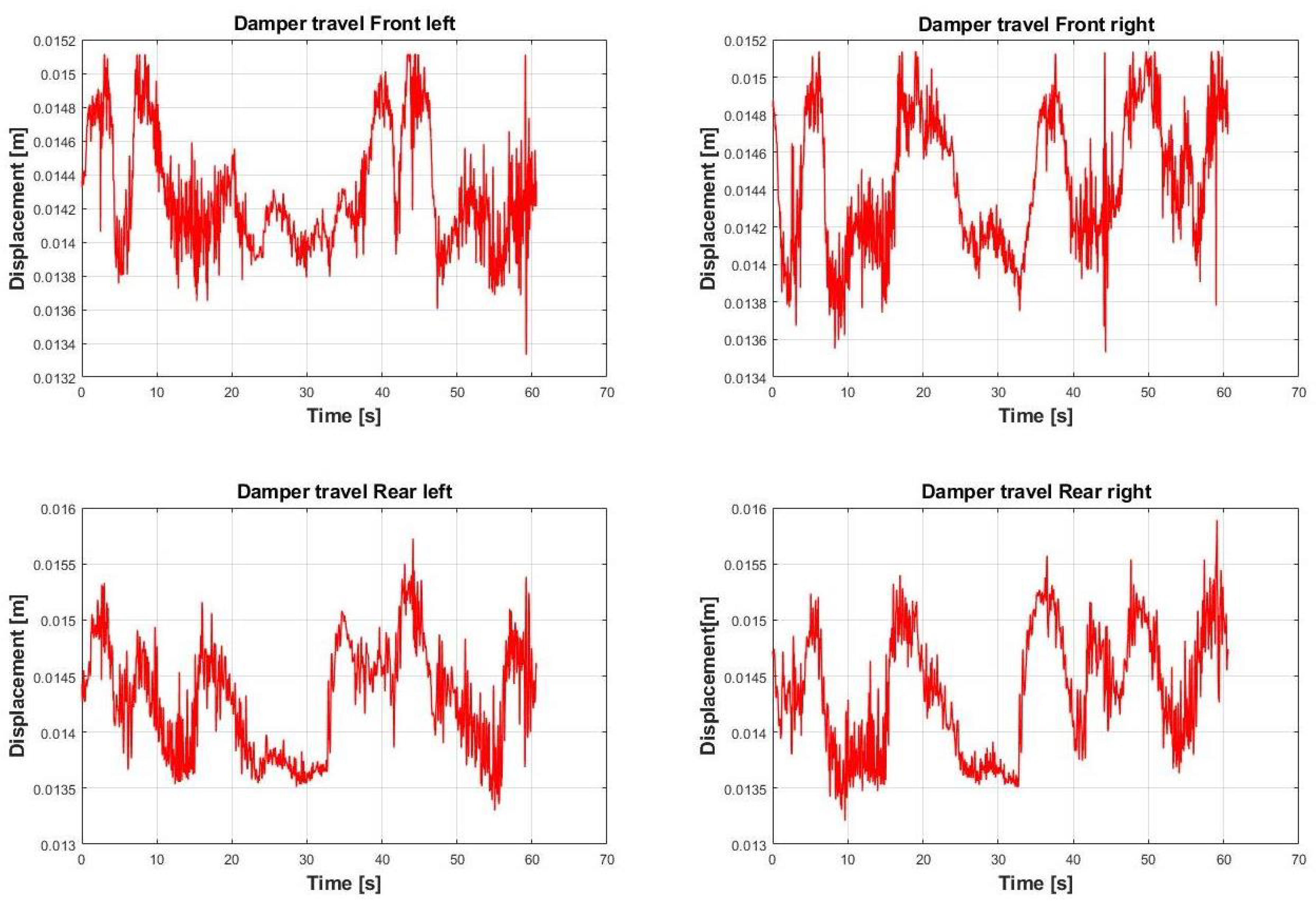
| Front left wheel/road contact point displacement | m |
| Front right wheel/road contact point displacement | m |
| Rear left wheel/road contact point displacement | m |
| Rear right wheel/road contact point displacement | m |
| Parameter | Baseline Setup | Optimized Setup | Predicted ANN Setup |
|---|---|---|---|
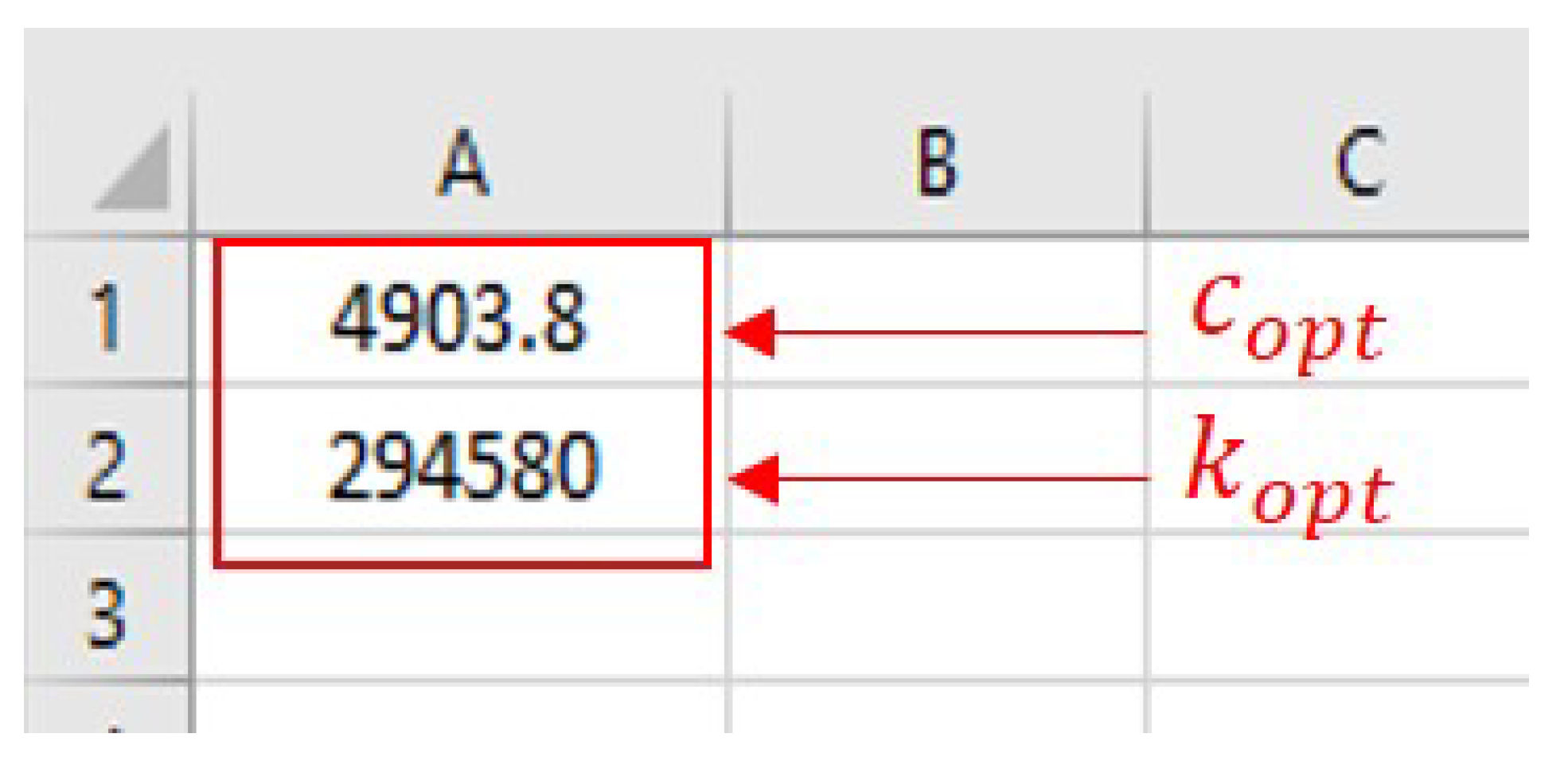
| k | 210,412.92 N/m | 294,580 N/m | 294,580 N/m |
| c | 3503 Ns/m | 4904 Ns/m | 4903.8 Ns/m |
| Parameter | Baseline Setup | Optimized Setup | Predicted ANN Setup |
|---|---|---|---|
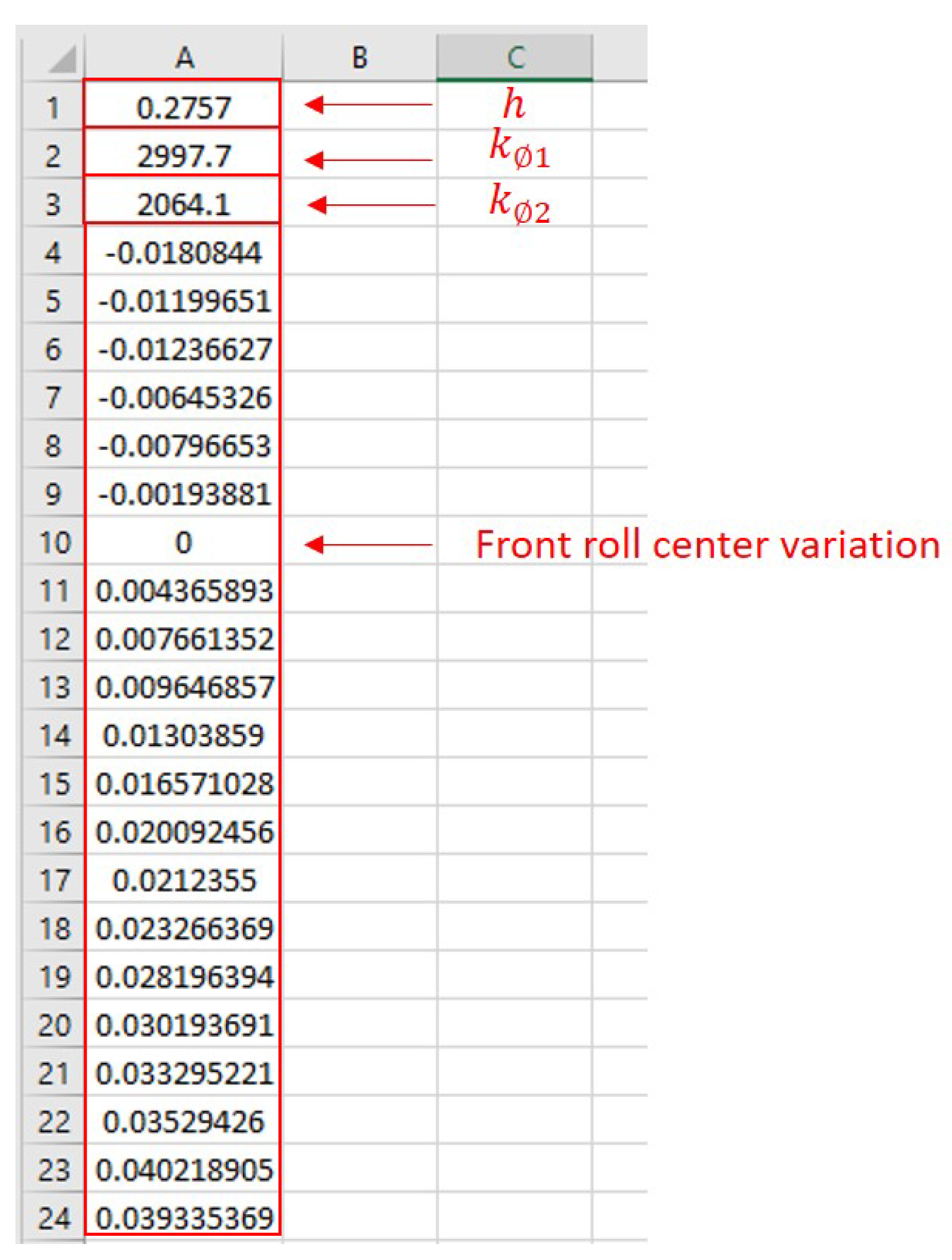
| h | 0.3 m | 0.2727 m | 0.2757 N/m |
| 3297.5 Nm/deg roll | 2997.7 Nm/deg roll | 2997.7 Nm/deg roll | |
| 2270.5 Nm/deg roll | 2064.1 Nm/deg roll | 2064.1 Nm/deg roll |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
D’Andrea, D.; Risitano, G.; Desiderio, E.; Quintarelli, A.; Milone, D.; Alberti, F. Artificial Neural Network Prediction of the Optimal Setup Parameters of a Seven Degrees of Freedom Mathematical Model of a Race Car: IndyCar Case Study. Vehicles 2021, 3, 300-329. https://doi.org/10.3390/vehicles3020019
D’Andrea D, Risitano G, Desiderio E, Quintarelli A, Milone D, Alberti F. Artificial Neural Network Prediction of the Optimal Setup Parameters of a Seven Degrees of Freedom Mathematical Model of a Race Car: IndyCar Case Study. Vehicles. 2021; 3(2):300-329. https://doi.org/10.3390/vehicles3020019
Chicago/Turabian StyleD’Andrea, Danilo, Giacomo Risitano, Ernesto Desiderio, Andrea Quintarelli, Dario Milone, and Fabio Alberti. 2021. "Artificial Neural Network Prediction of the Optimal Setup Parameters of a Seven Degrees of Freedom Mathematical Model of a Race Car: IndyCar Case Study" Vehicles 3, no. 2: 300-329. https://doi.org/10.3390/vehicles3020019
APA StyleD’Andrea, D., Risitano, G., Desiderio, E., Quintarelli, A., Milone, D., & Alberti, F. (2021). Artificial Neural Network Prediction of the Optimal Setup Parameters of a Seven Degrees of Freedom Mathematical Model of a Race Car: IndyCar Case Study. Vehicles, 3(2), 300-329. https://doi.org/10.3390/vehicles3020019