
Internet-of-Things Edge Computing Systems for Streaming Video Analytics: Trails Behind and the Paths Ahead


Abstract
:1. Introduction
1.1. Need for Edge Computing
1.2. Key Contributions
1.3. Paper Organization
2. Related Work
3. Background
3.1. Streaming Video Analytics
| Algorithm 1: High-level Activity Detection Pipeline Pseudocode [21] |
Data: videoStream Result: activityClasses
|
3.2. Application Use Cases
3.3. Edge System Components
3.3.1. System Architecture
3.3.2. Hardware
3.3.3. System Software Stack
3.4. Edge Computing Challenges
4. Ideal System Requirements for IoT Edge Streaming Video Analytics
4.1. Resource Heterogeneity
4.2. Application Support
4.3. Operational Ease
4.4. User Friendliness for End Users
4.5. Sustainability
5. Reported Systems for IoT Edge Streaming Video Analytics
Analysis Criteria
- Project (year): Project name and year of publication. If the project is not named by the authors, then the last name of the first author is listed.
- Focus: The primary design goal of the paper.
- Cross-camera inference: “Yes” indicates that the video analytics pipelines jointly consider the output of two or more cameras. “No” indicates that the analytics of each camera are independent.
- VAP components: Describes the distinct operations implemented by the video analytics pipelines described in the work. It should be noted that, while core components such as object detection and tracking involve computation-intensive deep learning algorithms, others such as video decoding and background subtraction use classical signal and image processing techniques.
- Performance objectives: These include both application performance objectives and system performance objectives. Application latency is the end-to-end latency from the point of capturing the video stream until the delivery of detected events to the end user. Application accuracy is typically expressed with metrics such as F1 score. System performance objectives revolve around computation, memory, bandwidth, power, and cost constraints.
- Profiling method: Profiling involves measuring the performance and resources associated with a video analytic pipeline using benchmark videos. Profiling could be performed either offline or online.
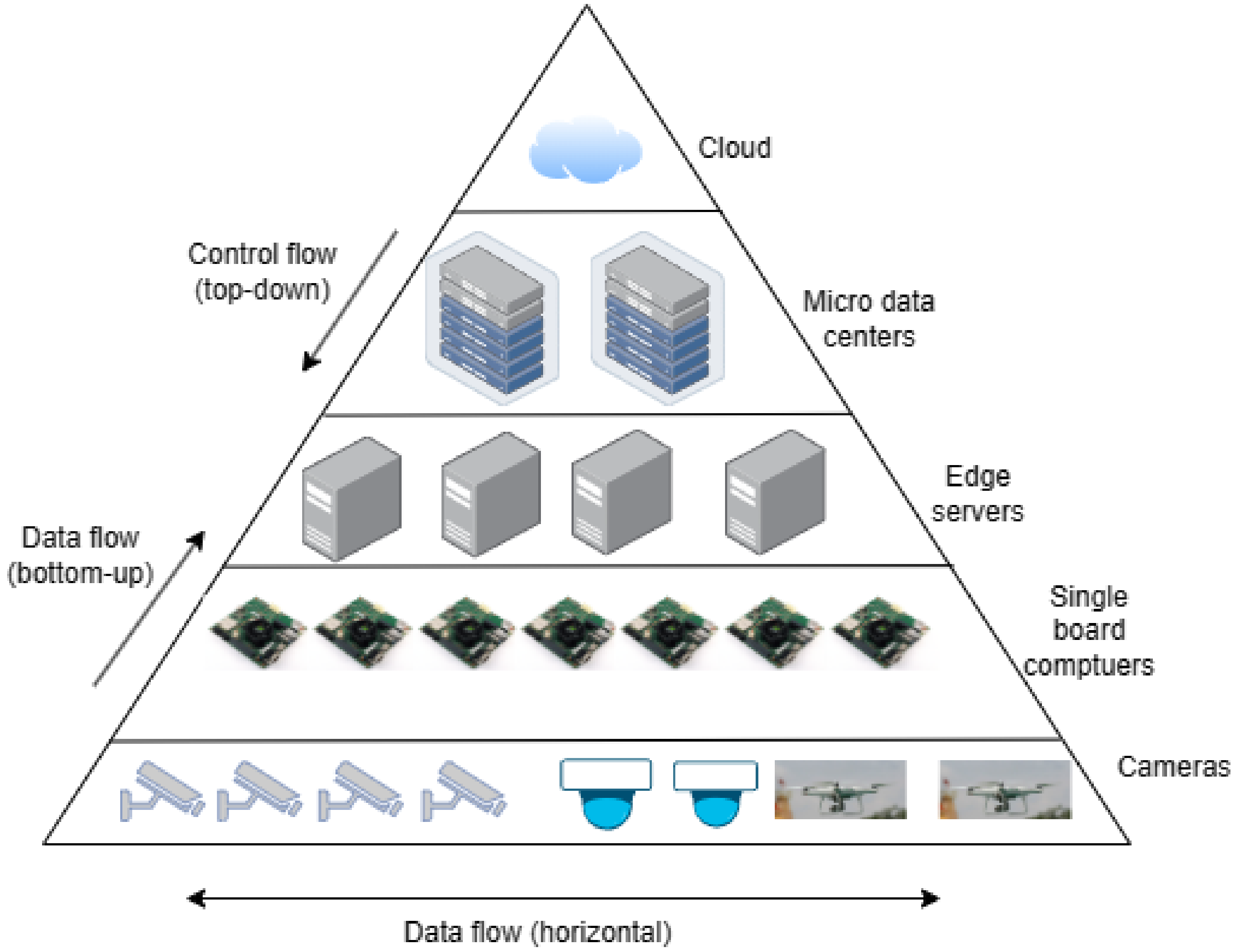
- Architecture: Figure 2 shows a generic edge architecture for video analytics. Within this general framework, specific edge architectures include edge-cloud, distributed edge, and multi-tiered hierarchical edge depending on the layers involved, and the communication patterns. Furthermore, an implementation could involve a combination of these architectures. For example, a scalable system without a public cloud could be composed of clusters of distributed edge nodes, with a geo-distribution-based hierarchy (indicated as DE and HE in Table 1).
- Scheduling: Describes algorithms reported for placing VAP components on the edge nodes such that performance and resource constraints are met.
- Runtime adaptation: Indicates whether a run-time performance adaptation technique was employed.
- Control plane: Indicates whether the work describes the design of a control plane. The control plane consists of the system software that controls the edge infrastructure.
- Data plane: Indicates whether the work describes the design of a data plane. The data plane consists of the system software that facilitates the flow of data between the analytics components.
- Human interface: Indicates whether the work reports aspects of the human user interface. Users, developers, and operators are the different types of people that interact with edge video analytic systems. The human interface design seeks to make this interaction easy and intuitive. A good UI/UX is key in ensuring that the systems constructed are used to their full potential by users.
- Security: Indicates whether the work considers the cybersecurity aspects of the system. Securing the system from malicious use is of the utmost importance, especially considering the sensitive nature of video data.
- Fault tolerance: indicates whether the work describes fault tolerance aspects of the system. Faults include both hardware and software failures.
- Observability: indicates whether the work considers observability aspects of the system. The ability to measure and analyze system operational information and application logs are critical to understanding the operational status of large-scale IE-SVA systems, as well as troubleshooting, locating, and repairing failures.
- Evaluation: Describes the type of evaluation testbeds used in the work. Approaches include the emulation of edge nodes using virtual machines, video workloads from standard datasets, the use of simulators, and edge hardware to build experimental testbeds.
6. Discussion
6.1. Network Bandwidth
6.1.1. Technique 1: Trade-Offs in Application Accuracy vs. Bandwidth
6.1.2. Technique 2: Hybrid Computation between Edge and Cloud
6.1.3. Research Gaps
6.2. Computational Efficiency
6.2.1. Technique 1: Trade-Offs in Application Accuracy vs. Resource Usage
6.2.2. Technique 2: Edge Efficient DNN Models
6.2.3. Technique 3: Continuous Learning at the Edge
6.2.4. Research Gaps
6.3. Scheduling
6.3.1. Technique: Constraint Optimization Problem Formulation
6.3.2. Research Gaps
6.4. Control and Data Plane
6.4.1. Technique: Distributed Hierarchical Architecture
6.4.2. Technique: Flexible Stream Processing Framework
6.4.3. Research Gaps
6.5. Multi-Camera Analytics
6.5.1. Technique 1: Multi-Camera Analysis to Improve Accuracy
6.5.2. Technique 2: Cross-Camera Analytics to Improve Efficiency
6.5.3. Research Gaps
6.6. Video Analytics Pipeline Components
Research Gaps
6.7. Fault Tolerance
Research Gaps
6.8. Privacy
6.8.1. Technique: Reversible Video Transformations That Preserve Privacy While Allowing Analytics
6.8.2. Research Gaps
6.9. Sustainability
6.9.1. Technique: Activate Video Analytics Only When Necessary
6.9.2. Research Gaps
7. Path Ahead
7.1. Short-Term Research
7.2. Medium-Term Research
7.3. Long-Term Research
8. Impact of Advancements in Other Areas in Computing
9. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- PRNewswire. Artificial Intelligence (AI) Camera Market to Grow at a CAGR of 12.04% from 2022 to 2027. 2023. Available online: https://finance.yahoo.com/news/artificial-intelligence-ai-camera-market-100000236.html (accessed on 19 October 2023).
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Jiao, L.; Zhang, F.; Liu, F.; Yang, S.; Li, L.; Feng, Z.; Qu, R. A survey of deep learning-based object detection. IEEE Access 2019, 7, 128837–128868. [Google Scholar]
- Pop, D.O.; Rogozan, A.; Chatelain, C.; Nashashibi, F.; Bensrhair, A. Multi-task deep learning for pedestrian detection, action recognition and time to cross prediction. IEEE Access 2019, 7, 149318–149327. [Google Scholar] [CrossRef]
- Ananthanarayanan, G.; Bahl, P.; Bodík, P.; Chintalapudi, K.; Philipose, M.; Ravindranath, L.; Sinha, S. Real-time video analytics: The killer app for edge computing. Computer 2017, 50, 58–67. [Google Scholar] [CrossRef]
- Zhang, Q.; Sun, H.; Wu, X.; Zhong, H. Edge video analytics for public safety: A review. Proc. IEEE 2019, 107, 1675–1696. [Google Scholar]
- Shi, W.; Cao, J.; Zhang, Q.; Li, Y.; Xu, L. Edge Computing: Vision and Challenges. IEEE Internet Things J. 2016, 3, 637–646. [Google Scholar] [CrossRef]
- Barthélemy, J.; Verstaevel, N.; Forehead, H.; Perez, P. Edge-computing video analytics for real-time traffic monitoring in a smart city. Sensors 2019, 19, 2048. [Google Scholar] [CrossRef] [PubMed]
- IP Camera Bandwidth Calculator & CCTV Storage Calculator. Available online: https://www.jvsg.com/storage-bandwidth-calculator/ (accessed on 19 October 2023).
- General Data Protection Regulation (GDPR). 2016. Available online: https://gdpr-info.eu/l (accessed on 19 October 2023).
- Guiding Principles on Government Use of Surveillance Technologies) 2023. Available online: https://www.state.gov/wp-content/uploads/2023/04/Guiding-Principles-on-Government-Use-of-Surveillance-Technologies.pdf (accessed on 19 October 2023).
- Xu, R.; Razavi, S.; Zheng, R. Deep Learning-Driven Edge Video Analytics: A Survey. arXiv 2022, arXiv:2211.15751. [Google Scholar]
- Hu, M.; Luo, Z.; Pasdar, A.; Lee, Y.C.; Zhou, Y.; Wu, D. Edge-Based Video Analytics: A Survey. arXiv 2023, arXiv:2303.14329. [Google Scholar]
- Goudarzi, M.; Palaniswami, M.; Buyya, R. Scheduling IoT applications in edge and fog computing environments: A taxonomy and future directions. ACM Comput. Surv. 2022, 55, 1–41. [Google Scholar] [CrossRef]
- Abbas, N.; Zhang, Y.; Taherkordi, A.; Skeie, T. Mobile edge computing: A survey. IEEE Internet Things J. 2017, 5, 450–465. [Google Scholar]
- Liu, F.; Tang, G.; Li, Y.; Cai, Z.; Zhang, X.; Zhou, T. A survey on edge computing systems and tools. Proc. IEEE 2019, 107, 1537–1562. [Google Scholar]
- Chen, J.; Ran, X. Deep learning with edge computing: A review. Proc. IEEE 2019, 107, 1655–1674. [Google Scholar]
- Greiffenhagen, M.; Comaniciu, D.; Niemann, H.; Ramesh, V. Design, analysis, and engineering of video monitoring systems: An approach and a case study. Proc. IEEE 2001, 89, 1498–1517. [Google Scholar]
- Tian, Y.L.; Brown, L.; Hampapur, A.; Lu, M.; Senior, A.; Shu, C.F. IBM smart surveillance system (S3): Event based video surveillance system with an open and extensible framework. Mach. Vis. Appl. 2008, 19, 315–327. [Google Scholar]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Liu, W.; Kang, G.; Huang, P.Y.; Chang, X.; Qian, Y.; Liang, J.; Gui, L.; Wen, J.; Chen, P. Argus: Efficient activity detection system for extended video analysis. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision Workshops, Waikoloa, HI, USA, 3–7 January 2020; pp. 126–133. [Google Scholar]
- TensorFlow 2 Detection Model Zoo. Available online: https://github.com/tensorflow/models/blob/master/research/object_detection/g3doc/tf2_detection_zoo.md/ (accessed on 19 October 2023).
- Li, Y.; Padmanabhan, A.; Zhao, P.; Wang, Y.; Xu, G.H.; Netravali, R. Reducto: On-camera filtering for resource-efficient real-time video analytics. In Proceedings of the Annual Conference of the ACM Special Interest Group on Data Communication on the Applications, Technologies, Architectures, and Protocols for Computer Communication, Online, 10–14 August 2020; pp. 359–376. [Google Scholar]
- Zhang, C.; Cao, Q.; Jiang, H.; Zhang, W.; Li, J.; Yao, J. A fast filtering mechanism to improve efficiency of large-scale video analytics. IEEE Trans. Comput. 2020, 69, 914–928. [Google Scholar]
- Jebamikyous, H.H.; Kashef, R. Autonomous Vehicles Perception (AVP) Using Deep Learning: Modeling, Assessment, and Challenges. IEEE Access 2022, 10, 10523–10535. [Google Scholar]
- Haghighat, A.K.; Ravichandra-Mouli, V.; Chakraborty, P.; Esfandiari, Y.; Arabi, S.; Sharma, A. Applications of Deep Learning in Intelligent Transportation Systems. J. Big Data Anal. Transp. 2020, 2, 115–145. [Google Scholar]
- Fei, L.; Han, B. Multi-Object Multi-Camera Tracking Based on Deep Learning for Intelligent Transportation: A Review. Sensors 2023, 23, 3852. [Google Scholar] [CrossRef]
- Cheong, K.H.; Poeschmann, S.; Lai, J.W.; Koh, J.M.; Acharya, U.R.; Yu, S.C.M.; Tang, K.J.W. Practical Automated Video Analytics for Crowd Monitoring and Counting. IEEE Access 2019, 7, 183252–183261. [Google Scholar]
- Li, J.; Liao, J.; Chen, B.; Nguyen, A.; Tiwari, A.; Zhou, Q.; Yan, Z.; Nahrstedt, K. Latency-Aware 360-Degree Video Analytics Framework for First Responders Situational Awareness. In Proceedings of the 33rd Workshop on Network and Operating System Support for Digital Audio and Video, Vancouver, BC, Canada, 7–10 June 2023; pp. 8–14. [Google Scholar]
- Garcia, R.V.; Wandzik, L.; Grabner, L.; Krueger, J. The Harms of Demographic Bias in Deep Face Recognition Research. In Proceedings of the 2019 International Conference on Biometrics (ICB), Crete, Greece, 4–7 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Rashwan, H.A.; Solanas, A.; Puig, D.; Martínez-Ballesté, A. Understanding Trust in Privacy-Aware Video Surveillance Systems. Int. J. Inf. Secur. 2016, 15, 225–234. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, C.; Wang, Y. Human Fall Detection Based on Body Posture Spatio-Temporal Evolution. Sensors 2020, 20, 946. [Google Scholar]
- Ahumada, J.A.; Fegraus, E.; Birch, T.; Flores, N.; Kays, R.; O’Brien, T.G.; Palmer, J.; Schuttler, S.; Zhao, J.Y.; Jetz, W.; et al. Wildlife Insights: A Platform to Maximize the Potential of Camera Trap and Other Passive Sensor Wildlife Data for the Planet. Environ. Conserv. 2020, 47, 1–6. [Google Scholar] [CrossRef]
- Muhammad, K.; Hussain, T.; Del Ser, J.; Palade, V.; De Albuquerque, V.H.C. DeepReS: A Deep Learning-Based Video Summarization Strategy for Resource-Constrained Industrial Surveillance Scenarios. IEEE Trans. Ind. Inform. 2019, 16, 5938–5947. [Google Scholar]
- Ahmad, H.M.; Rahimi, A. Deep Learning Methods for Object Detection in Smart Manufacturing: A Survey. J. Manuf. Syst. 2022, 64, 181–196. [Google Scholar]
- Kirkpatrick, K. Tracking Shoppers. Commun. ACM 2020, 63, 19–21. [Google Scholar]
- Lygouras, E.; Santavas, N.; Taitzoglou, A.; Tarchanidis, K.; Mitropoulos, A.; Gasteratos, A. Unsupervised Human Detection with an Embedded Vision System on a Fully Autonomous UAV for Search and Rescue Operations. Sensors 2019, 19, 3542. [Google Scholar]
- Sambolek, S.; Ivasic-Kos, M. Automatic Person Detection in Search and Rescue Operations Using Deep CNN Detectors. IEEE Access 2021, 9, 37905–37922. [Google Scholar]
- Liu, D.; Abdelzaher, T.; Wang, T.; Hu, Y.; Li, J.; Liu, S.; Caesar, M.; Kalasapura, D.; Bhattacharyya, J.; Srour, N.; et al. IoBT-OS: Optimizing the Sensing-to-Decision Loop for the Internet of Battlefield Things. In Proceedings of the 2022 International Conference on Computer Communications and Networks (ICCCN), IEEE, Honolulu, HI, USA, 25–28 July 2022; pp. 1–10. [Google Scholar]
- Satyanarayanan, M.; Harkes, J.; Blakley, J.; Meunier, M.; Mohandoss, G.; Friedt, K.; Thulasi, A.; Saxena, P.; Barritt, B. Sinfonia: Cross-tier Orchestration for Edge-Native Applications. Front. Internet Things 2022, 1, 1025247. [Google Scholar]
- Wang, Y.; Wang, W.; Liu, D.; Jin, X.; Jiang, J.; Chen, K. Enabling edge-cloud video analytics for robotics applications. IEEE Trans. Cloud Comput. 2022, 11, 1500–1513. [Google Scholar] [CrossRef]
- Armbrust, M.; Fox, A.; Griffith, R.; Joseph, A.D.; Katz, R.; Konwinski, A.; Lee, G.; Patterson, D.; Rabkin, A.; Stoica, I.; et al. A view of cloud computing. Commun. ACM 2010, 53, 50–58. [Google Scholar] [CrossRef]
- Pahl, C.; Jamshidi, P.; Zimmermann, O. Architectural principles for cloud software. ACM Trans. Internet Technol. (TOIT) 2018, 18, 1–23. [Google Scholar] [CrossRef]
- Schleier-Smith, J.; Sreekanti, V.; Khandelwal, A.; Carreira, J.; Yadwadkar, N.J.; Popa, R.A.; Gonzalez, J.E.; Stoica, I.; Patterson, D.A. What serverless computing is and should become: The next phase of cloud computing. Commun. ACM 2021, 64, 76–84. [Google Scholar] [CrossRef]
- Docker: Accelerated, Containerized Application Development. Available online: https://www.docker.com/ (accessed on 19 October 2023).
- Kubernetes: Production-Grade Container Orchestration. Available online: https://kubernetes.io/ (accessed on 19 October 2023).
- Apache Kafka. Available online: https://kafka.apache.org/ (accessed on 19 October 2023).
- JetStream. Available online: https://docs.nats.io/nats-concepts/jetstream (accessed on 19 October 2023).
- RabbitMQ. Available online: https://www.rabbitmq.com/ (accessed on 19 October 2023).
- Cattell, R. Scalable SQL and NoSQL Data Stores. ACM Sigmod Rec. 2011, 39, 12–27. [Google Scholar] [CrossRef]
- Lightweight Kubernetes: The Certified Kubernetes Distribution Built for IoT and Edge Computing. Available online: https://k3s.io/ (accessed on 19 October 2023).
- Fu, X.; Ghaffar, T.; Davis, J.C.; Lee, D. EdgeWise: A Better Stream Processing Engine for the Edge. In Proceedings of the 2019 USENIX Annual Technical Conference (USENIX ATC 19), Renton, WA, USA, 10–12 July 2019; pp. 929–946. [Google Scholar]
- Sonbol, K.; Özkasap, Ö.; Al-Oqily, I.; Aloqaily, M. EdgeKV: Decentralized, Scalable, and Consistent Storage for the Edge. J. Parallel Distrib. Comput. 2020, 144, 28–40. [Google Scholar] [CrossRef]
- George, A.; Ravindran, A.; Mendieta, M.; Tabkhi, H. Mez: An Adaptive Messaging System for Latency-Sensitive Multi-Camera Machine Vision at the IoT Edge. IEEE Access 2021, 9, 21457–21473. [Google Scholar] [CrossRef]
- Ramprasad, B.; Mishra, P.; Thiessen, M.; Chen, H.; da Silva Veith, A.; Gabel, M.; Balmau, O.; Chow, A.; de Lara, E. Shepherd: Seamless Stream Processing on the Edge. In Proceedings of the 2022 IEEE/ACM 7th Symposium on Edge Computing (SEC), IEEE, Seattle, WA, USA, 5–8 December 2022; pp. 40–53. [Google Scholar]
- AWS Outposts Family. Available online: https://aws.amazon.com/outposts/ (accessed on 19 October 2023).
- Xu, M.; Liu, Y.; Liu, X. A Case for Camera-as-a-Service. IEEE Pervasive Comput. 2021, 20, 9–17. [Google Scholar] [CrossRef]
- Ha, K.; Chen, Z.; Hu, W.; Richter, W.; Pillai, P.; Satyanarayanan, M. Towards Wearable Cognitive Assistance. In Proceedings of the 12th Annual International Conference on Mobile Systems, Applications, and Services, Bretton Woods, NH, USA, 16–19 June 2014; pp. 68–81. [Google Scholar]
- Zhang, T.; Chowdhery, A.; Bahl, P.; Jamieson, K.; Banerjee, S. The Design and Implementation of a Wireless Video Surveillance System. In Proceedings of the 21st Annual International Conference on Mobile Computing and Networking, Paris, France, 7–11 September 2015; pp. 426–438. [Google Scholar]
- Microsoft Rocket for Live Video Analytics. Available online: https://www.microsoft.com/en-us/research/project/live-video-analytics/ (accessed on 19 October 2023).
- Chen, T.Y.H.; Ravindranath, L.; Deng, S.; Bahl, P.; Balakrishnan, H. Glimpse: Continuous, real-time object recognition on mobile devices. In Proceedings of the 13th ACM Conference on Embedded Networked Sensor Systems, Seoul, Republic of Korea, 1–4 November 2015; pp. 155–168. [Google Scholar]
- Zhang, H.; Ananthanarayanan, G.; Bodik, P.; Philipose, M.; Bahl, P.; Freedman, M.J. Live video analytics at scale with approximation and Delay-Tolerance. In Proceedings of the 14th USENIX Symposium on Networked Systems Design and Implementation (NSDI 17), Boston, MA, USA, 27–29 March 2017; pp. 377–392. [Google Scholar]
- Wang, J.; Amos, B.; Das, A.; Pillai, P.; Sadeh, N.; Satyanarayanan, M. A scalable and privacy-aware IoT service for live video analytics. In Proceedings of the 8th ACM on Multimedia Systems Conference, Taipei, China, 20–23 June 2017; pp. 38–49. [Google Scholar]
- Yi, S.; Hao, Z.; Zhang, Q.; Zhang, Q.; Shi, W.; Li, Q. Lavea: Latency-aware video analytics on edge computing platform. In Proceedings of the Second ACM/IEEE Symposium on Edge Computing, San Jose, CA, USA, 12–14 October 2017; pp. 1–13. [Google Scholar]
- Hung, C.C.; Ananthanarayanan, G.; Bodik, P.; Golubchik, L.; Yu, M.; Bahl, P.; Philipose, M. Videoedge: Processing camera streams using hierarchical clusters. In Proceedings of the 2018 IEEE/ACM Symposium on Edge Computing (SEC), IEEE, Seattle, WA, USA, 25–27 October 2018; pp. 115–131. [Google Scholar]
- Zhang, B.; Jin, X.; Ratnasamy, S.; Wawrzynek, J.; Lee, E.A. Awstream: Adaptive wide-area streaming analytics. In Proceedings of the 2018 Conference of the ACM Special Interest Group on Data Communication, Budapest, Hungary, 20–25 August 2018; pp. 236–252. [Google Scholar]
- Jiang, J.; Ananthanarayanan, G.; Bodik, P.; Sen, S.; Stoica, I. Chameleon: Scalable adaptation of video analytics. In Proceedings of the 2018 Conference of the ACM Special Interest Group on Data Communication, Budapest, Hungary, 20–25 August 2018; pp. 253–266. [Google Scholar]
- Wang, J.; Feng, Z.; Chen, Z.; George, S.; Bala, M.; Pillai, P.; Yang, S.W.; Satyanarayanan, M. Bandwidth-efficient live video analytics for drones via edge computing. In Proceedings of the 2018 IEEE/ACM Symposium on Edge Computing (SEC), IEEE, Seattle, WA, USA, 25–27 October 2018; pp. 159–173. [Google Scholar]
- Liu, P.; Qi, B.; Banerjee, S. Edgeeye: An edge service framework for real-time intelligent video analytics. In Proceedings of the 1st International Workshop on Edge Systems, Analytics and Networking, Munich, Germany, 10–15 June 2018; pp. 1–6. [Google Scholar]
- Salehe, M.; Hu, Z.; Mortazavi, S.H.; Mohomed, I.; Capes, T. Videopipe: Building video stream processing pipelines at the edge. In Proceedings of the 20th International Middleware Conference Industrial Track, Davis, CA, USA, 9–13 December 2019; pp. 43–49. [Google Scholar]
- Canel, C.; Kim, T.; Zhou, G.; Li, C.; Lim, H.; Andersen, D.G.; Kaminsky, M.; Dulloor, S. Scaling video analytics on constrained edge nodes. Proc. Mach. Learn. Syst. 2019, 1, 406–417. [Google Scholar]
- Fang, Z.; Hong, D.; Gupta, R.K. Serving deep neural networks at the cloud edge for vision applications on mobile platforms. In Proceedings of the 10th ACM Multimedia Systems Conference, Amherst, MA, USA, 18–21 June 2019; pp. 36–47. [Google Scholar]
- Hsu, K.J.; Bhardwaj, K.; Gavrilovska, A. Couper: Dnn model slicing for visual analytics containers at the edge. In Proceedings of the 4th ACM/IEEE Symposium on Edge Computing, Arlington, VA, USA, 7–9 November 2019; pp. 179–194. [Google Scholar]
- Zhang, W.; Li, S.; Liu, L.; Jia, Z.; Zhang, Y.; Raychaudhuri, D. Hetero-edge: Orchestration of real-time vision applications on heterogeneous edge clouds. In Proceedings of the IEEE INFOCOM 2019-IEEE Conference on Computer Communications, IEEE, Paris, France, 29 April–2 May 2019; pp. 1270–1278. [Google Scholar]
- Liu, L.; Li, H.; Gruteser, M. Edge assisted real-time object detection for mobile augmented reality. In Proceedings of the the 25th Annual International Conference on Mobile Computing and Networking, Los Cabos, Mexico, 21–25 October 2019; pp. 1–16. [Google Scholar]
- Apicharttrisorn, K.; Ran, X.; Chen, J.; Krishnamurthy, S.V.; Roy-Chowdhury, A.K. Frugal following: Power thrifty object detection and tracking for mobile augmented reality. In Proceedings of the 17th Conference on Embedded Networked Sensor Systems, New York, NY, USA, 10–13 November 2019; pp. 96–109. [Google Scholar]
- Zeng, X.; Fang, B.; Shen, H.; Zhang, M. Distream: Scaling live video analytics with workload-adaptive distributed edge intelligence. In Proceedings of the 18th Conference on Embedded Networked Sensor Systems, Virtual, 16–19 November 2020; pp. 409–421. [Google Scholar]
- Sun, H.; Shi, W.; Liang, X.; Yu, Y. VU: Edge computing-enabled video usefulness detection and its application in large-scale video surveillance systems. IEEE Internet Things J. 2019, 7, 800–817. [Google Scholar] [CrossRef]
- Nigade, V.; Wang, L.; Bal, H. Clownfish: Edge and cloud symbiosis for video stream analytics. In Proceedings of the 2020 IEEE/ACM Symposium on Edge Computing (SEC), IEEE, San Jose, CA, USA, 12–14 November 2020; pp. 55–69. [Google Scholar]
- Jain, S.; Zhang, X.; Zhou, Y.; Ananthanarayanan, G.; Jiang, J.; Shu, Y.; Bahl, P.; Gonzalez, J. Spatula: Efficient cross-camera video analytics on large camera networks. In Proceedings of the 2020 IEEE/ACM Symposium on Edge Computing (SEC), IEEE, San Jose, CA, USA, 12–14 November 2020; pp. 110–124. [Google Scholar]
- Neff, C.; Mendieta, M.; Mohan, S.; Baharani, M.; Rogers, S.; Tabkhi, H. REVAMP 2 T: Real-time edge video analytics for multicamera privacy-aware pedestrian tracking. IEEE Internet Things J. 2019, 7, 2591–2602. [Google Scholar] [CrossRef]
- Khochare, A.; Krishnan, A.; Simmhan, Y. A scalable platform for distributed object tracking across a many-camera network. IEEE Trans. Parallel Distrib. Syst. 2021, 32, 1479–1493. [Google Scholar] [CrossRef]
- Jang, S.Y.; Kostadinov, B.; Lee, D. Microservice-based edge device architecture for video analytics. In Proceedings of the 2021 IEEE/ACM Symposium on Edge Computing (SEC), San Jose, CA, USA, 14–17 November 2021; pp. 165–177. [Google Scholar]
- Saurez, E.; Gupta, H.; Daglis, A.; Ramachandran, U. Oneedge: An efficient control plane for geo-distributed infrastructures. In Proceedings of the ACM Symposium on Cloud Computing, Seattle, WA, USA, 1–4 November 2021; pp. 182–196. [Google Scholar]
- Xiao, Z.; Xia, Z.; Zheng, H.; Zhao, B.Y.; Jiang, J. Towards performance clarity of edge video analytics. In Proceedings of the 2021 IEEE/ACM Symposium on Edge Computing (SEC), IEEE, San Jose, CA, USA, 14–17 November 2021; pp. 148–164. [Google Scholar]
- Wu, H.; Tian, X.; Li, M.; Liu, Y.; Ananthanarayanan, G.; Xu, F.; Zhong, S. Pecam: Privacy-enhanced video streaming and analytics via securely-reversible transformation. In Proceedings of the 27th Annual International Conference on Mobile Computing and Networking, New Orleans, LA, USA, 25–29 October 2021; pp. 229–241. [Google Scholar]
- Yang, Z.; Nahrstedt, K.; Guo, H.; Zhou, Q. Deeprt: A soft real time scheduler for computer vision applications on the edge. In Proceedings of the 2021 IEEE/ACM Symposium on Edge Computing (SEC), IEEE, San Jose, CA, USA, 14–17 December 2021; pp. 271–284. [Google Scholar]
- Zhang, M.; Wang, F.; Liu, J. CASVA: Configuration-Adaptive Streaming for Live Video Analytics. In Proceedings of the IEEE INFOCOM 2022-IEEE Conference on Computer Communications, IEEE, Online, 2–5 May 2022; pp. 2168–2177. [Google Scholar]
- Cao, D.; Yoo, J.; Xu, Z.; Saurez, E.; Gupta, H.; Krishna, T.; Ramachandran, U. MicroEdge: A multi-tenant edge cluster system architecture for scalable camera processing. In Proceedings of the 23rd ACM/IFIP International Middleware Conference, Quebec, QC, Canada, 7–11 November 2022; pp. 322–334. [Google Scholar]
- Yang, Z.; Wang, X.; Wu, J.; Zhao, Y.; Ma, Q.; Miao, X.; Zhang, L.; Zhou, Z. Edgeduet: Tiling small object detection for edge assisted autonomous mobile vision. In Proceedings of the IEEE INFOCOM 2021—IEEE Conference on Computer Communications, Vancouver, BC, Canada, 10–13 May 2021. [Google Scholar]
- Bhardwaj, R.; Xia, Z.; Ananthanarayanan, G.; Jiang, J.; Shu, Y.; Karianakis, N.; Hsieh, K.; Bahl, P.; Stoica, I. Ekya: Continuous learning of video analytics models on edge compute servers. In Proceedings of the 19th USENIX Symposium on Networked Systems Design and Implementation (NSDI 22), Hyatt Regency Lake, WA, USA, 4–6 April 2022; pp. 119–135. [Google Scholar]
- Padmanabhan, A.; Agarwal, N.; Iyer, A.; Ananthanarayanan, G.; Shu, Y.; Karianakis, N.; Xu, G.H.; Netravali, R. Gemel: Model Merging for Memory-Efficient, Real-Time Video Analytics at the Edge. In Proceedings of the 20th USENIX Symposium on Networked Systems Design and Implementation (NSDI 23), Boston, MA, USA, 17–19 April 2023; pp. 973–994. [Google Scholar]
- Khani, M.; Ananthanarayanan, G.; Hsieh, K.; Jiang, J.; Netravali, R.; Shu, Y.; Alizadeh, M.; Bahl, V. RECL: Responsive Resource-Efficient Continuous Learning for Video Analytics. In Proceedings of the 20th USENIX Symposium on Networked Systems Design and Implementation (NSDI 23), Boston, MA, USA, 17–19 April 2023; pp. 917–932. [Google Scholar]
- Ghosh, A.; Iyengar, S.; Lee, S.; Rathore, A.; Padmanabhan, V.N. REACT: Streaming Video Analytics On The Edge with Asynchronous Cloud Support. In Proceedings of the 8th ACM/IEEE Conference on Internet of Things Design and Implementation, San Antonio, TX, USA, 9–12 May 2023; pp. 222–235. [Google Scholar]
- Rezaei, Y.; Khan, T.; Lee, S.; Mossé, D. Solar-powered Parking Analytics System Using Deep Reinforcement Learning. ACM Trans. Sens. Netw. 2023, 19, 1–27. [Google Scholar] [CrossRef]
- Zhang, S.; Sutton, R.S. A deeper look at experience replay. arXiv 2017, arXiv:1712.01275. [Google Scholar]
- Otterness, N.; Anderson, J.H. AMD GPUs as an Alternative to NVIDIA for Supporting Real-Time Workloads. In Leibniz International Proceedings in Informatics (LIPIcs), Proceedings of the 32nd Euromicro Conference on Real-Time Systems (ECRTS 2020), Online, 7–10 July 2020; Völp, M., Ed.; Schloss Dagstuhl: Dagstuhl, Germany, 2020; Volume 165, pp. 101–1023. [Google Scholar] [CrossRef]
- Yin, X.; Zhu, Y.; Hu, J. A comprehensive survey of privacy-preserving federated learning: A taxonomy, review, and future directions. ACM Comput. Surv. (CSUR) 2021, 54, 1–36. [Google Scholar] [CrossRef]
- Bittencourt, L.F.; Goldman, A.; Madeira, E.R.; da Fonseca, N.L.; Sakellariou, R. Scheduling in distributed systems: A cloud computing perspective. Comput. Sci. Rev. 2018, 30, 31–54. [Google Scholar] [CrossRef]
- KubeEdge Kubernetes Native Edge Computing Framework. Available online: https://kubeedge.io/ (accessed on 1 September 2023).
- Apache Flink—Stateful Computations over Data Streams. Available online: https://flink.apache.org/ (accessed on 1 September 2023).
- Apache Storm. Available online: https://storm.apache.org/ (accessed on 1 September 2023).
- Pazho, A.D.; Neff, C.; Noghre, G.A.; Ardabili, B.R.; Yao, S.; Baharani, M.; Tabkhi, H. Ancilia: Scalable intelligent video surveillance for the artificial intelligence of things. IEEE Internet Things J. 2023, 10, 14940–14951. [Google Scholar] [CrossRef]
- Berrios, W.; Mittal, G.; Thrush, T.; Kiela, D.; Singh, A. Towards language models that can see: Computer vision through the lens of natural language. arXiv 2023, arXiv:2306.16410. [Google Scholar]
- Mukwevho, M.A.; Celik, T. Toward a smart cloud: A review of fault-tolerance methods in cloud systems. IEEE Trans. Serv. Comput. 2018, 14, 589–605. [Google Scholar] [CrossRef]
- Acar, A.; Aksu, H.; Uluagac, A.S.; Conti, M. A survey on homomorphic encryption schemes: Theory and implementation. ACM Comput. Surv. (Csur) 2018, 51, 1–35. [Google Scholar] [CrossRef]
- Bentafat, E.; Rathore, M.M.; Bakiras, S. Towards real-time privacy-preserving video surveillance. Comput. Commun. 2021, 180, 97–108. [Google Scholar] [CrossRef]
- Knative Is an Open-Source Enterprise-Level Solution to Build Serverless and Event Driven Applications. Available online: https://knative.dev/docs/ (accessed on 19 October 2023).
- Serverless Functions, Made Simple. Available online: https://www.openfaas.com/ (accessed on 19 October 2023).
- ns3 Network Simulator. Available online: https://www.nsnam.org/ (accessed on 19 October 2023).
- Hack of ’150,000 Cameras’ Investigated by Camera Firm. Published on 10 March 2021. Available online: https://www.bbc.com/news/technology-56342525 (accessed on 19 October 2023).
- Antonakakis, M.; April, T.; Bailey, M.; Bernhard, M.; Bursztein, E.; Cochran, J.; Durumeric, Z.; Halderman, J.A.; Invernizzi, L.; Kallitsis, M.; et al. Understanding the Mirai Botnet. In Proceedings of the 26th USENIX Security Symposium (USENIX Security 17), Vancouver, BC, Canada, 16–18 August 2017; pp. 1093–1110. [Google Scholar]
- Vacca, J.R. (Ed.) Cloud Computing Security: Foundations and Challenges; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Xiao, Y.; Jia, Y.; Liu, C.; Cheng, X.; Yu, J.; Lv, W. Edge Computing Security: State of the Art and Challenges. Proc. IEEE 2019, 107, 1608–1631. [Google Scholar] [CrossRef]
- Li, H.; He, Y.; Sun, L.; Cheng, X.; Yu, J. Side-channel Information Leakage of Encrypted Video Stream in Video Surveillance Systems. In Proceedings of the IEEE INFOCOM 2016 - The 35th Annual IEEE International Conference on Computer Communications, IEEE, San Francisco, CA, USA, 10–14 April 2016; pp. 1–9. [Google Scholar]
- Singh, S.; Sulthana, R.; Shewale, T.; Chamola, V.; Benslimane, A.; Sikdar, B. Machine-learning-assisted security and privacy provisioning for edge computing: A survey. IEEE Internet Things J. 2021, 9, 236–260. [Google Scholar] [CrossRef]
- Coppolino, L.; D’Antonio, S.; Mazzeo, G.; Romano, L. A comprehensive survey of hardware-assisted security: From the edge to the cloud. Internet Things 2019, 6, 100055. [Google Scholar] [CrossRef]
- Akhtar, N.; Mian, A.; Kardan, N.; Shah, M. Advances in adversarial attacks and defenses in computer vision: A survey. IEEE Access 2021, 9, 155161–155196. [Google Scholar] [CrossRef]
- Serban, A.; Poll, E.; Visser, J. Adversarial examples on object recognition: A comprehensive survey. ACM Comput. Surv. (CSUR) 2020, 53, 1–38. [Google Scholar] [CrossRef]
- Bai, T.; Luo, J.; Zhao, J.; Wen, B.; Wang, Q. Recent advances in adversarial training for adversarial robustness. arXiv 2021, arXiv:2102.01356. [Google Scholar]
- Guo, C.; Rana, M.; Cisse, M.; Van Der Maaten, L. Countering adversarial images using input transformations. arXiv 2017, arXiv:1711.00117. [Google Scholar]
- Qin, Y.; Frosst, N.; Sabour, S.; Raffel, C.; Cottrell, G.; Hinton, G. Detecting and diagnosing adversarial images with class-conditional capsule reconstructions. arXiv 2019, arXiv:1907.02957. [Google Scholar]
- Bastani, F.; Moll, O.; Madden, S. Vaas: Video analytics at scale. Proc. VLDB Endow. 2020, 13, 2877–2880. [Google Scholar] [CrossRef]
- Leite, L.; Rocha, C.; Kon, F.; Milojicic, D.; Meirelles, P. A survey of DevOps concepts and challenges. ACM Comput. Surv. (CSUR) 2019, 52, 1–35. [Google Scholar] [CrossRef]
- Notaro, P.; Cardoso, J.; Gerndt, M. A Survey of AIOps Methods for Failure Management. ACM Trans. Intell. Syst. Technol. (TIST) 2021, 12, 1–45. [Google Scholar] [CrossRef]
- Li, Y.; Jiang, Z.M.; Li, H.; Hassan, A.E.; He, C.; Huang, R.; Zeng, Z.; Wang, M.; Chen, P. Predicting node failures in an ultra-large-scale cloud computing platform: An aiops solution. ACM Trans. Softw. Eng. Methodol. (TOSEM) 2020, 29, 1–24. [Google Scholar] [CrossRef]
- Shahin, M.; Babar, M.A.; Zhu, L. Continuous integration, delivery and deployment: A systematic review on approaches, tools, challenges and practices. IEEE Access 2017, 5, 3909–3943. [Google Scholar] [CrossRef]
- 5G Network Coverage Outlook. Available online: https://www.ericsson.com/en/reports-and-papers/mobility-report/dataforecasts/network-coverage (accessed on 19 October 2023).
- Next-Gen Mobile Internet—6G—Will Launch in 2030, Telecom Bosses Say, Even as 5G Adoption Remains Low. Published on 7 March 2023. Available online: https://www.cnbc.com/2023/03/08/what-is-6g-and-when-will-it-launch-telco-execs-predict.html (accessed on 19 October 2023).
- Wei, J.; Tay, Y.; Bommasani, R.; Raffel, C.; Zoph, B.; Borgeaud, S.; Yogatama, D.; Bosma, M.; Zhou, D.; Metzler, D.; et al. Emergent abilities of large language models. arXiv 2022, arXiv:2206.07682. [Google Scholar]
- ChatGPT: Get Instant Answers, Find Creative Inspiration, and Learn Something New. Available online: https://openai.com/chatgptl (accessed on 19 October 2023).
- Bing Helps You Turn Information into Action, Making It Faster and Easier to Go from Searching to Doing. Available online: https://www.bing.com/?/ai (accessed on 19 October 2023).
- Introducing Llama 2—The Next Generation of oUr Open Source Large Language Model. Available online: https://ai.meta.com/llama/ (accessed on 19 October 2023).
- Web Assemblyl. Available online: https://webassembly.org/ (accessed on 19 October 2023).
- Containers, vs. WebAssembly: What Is the Difference? Published on March 2022. Available online: https://www.fermyon.com/blog/webassembly-vs-containers (accessed on 19 October 2023).
- WebAssembly System Interface. Published on March 2022. Available online: https://github.com/WebAssembly/WASI (accessed on 19 October 2023).
- Artificial Intelligence Act. Available online: https://artificialintelligenceact.eu (accessed on 19 October 2023).
- Ensuring Safe, Secure, and Trustworthy AI. Published on 21 July 2023. Available online: https://www.whitehouse.gov/wp-content/uploads/2023/07/Ensuring-Safe-Secure-and-Trustworthy-AI.pd (accessed on 19 October 2023).


{kind=link}
{kind=link}
{kind=link}
| Project (Year) | Focus | Perf. Obj. | Cross Cam. | VAP Compon. | Profile | Arch. |
|---|---|---|---|---|---|---|
| Vigil (2015) [59] | ECB | MaxBW | Yes | FDR | No | EC |
| Glimpse (2015) [61] | MEB | MaxAcc | No | FDR | No | ME |
| VideoStorm (2017) [62] | PS | MaxAcc-MinLat | No | BS, OD, OT | OFF | DE, EC |
| OpenFace (2017) [63] | SP | MaxPriv | No | FDR | No | DE |
| Lavea (2017) [64] | PS | MinLat | No | CR | OFF | DE, HE |
| VideoEdge (2018) [65] | CE, PS | MaxAcc-ResCon | No | OC, CR | OFF | DE, EC |
| AWStream (2018) [66] | ECB | MaxAcc-ResCon | No | OD, OC | OFF | EC |
| Chameleon (2018) [67] | CE | MaxAcc-ResCon | Yes | OD, OC | ON | SE |
| Wang et al. (2018) [68] | ECB | MinBW-MaxAcc | No | OD, OC | No | HE |
| EdgeEye (2018) [69] | SS | MaxTh | No | OD | No | SE |
| VideoPipe (2019) [70] | SS | MinLat | No | PD, AR | No | DE |
| FilterForward (2019) [71] | ECB | MinBW-MaxAcc | No | OC | ON | EC |
| DeepQuery (2019) [72] | CE | MinLat | No | OD, OT, SD, VD | ON | ME |
| Couper (2019) [73] | SS | UD | No | OC | UD | EC |
| HeteroEdge (2019) [74] | SS | MinLat | No | 3DR | OFF | DE |
| Liu et al. (2019) [75] | ECB | MaxAcc-MinLat | No | OD | No | ME |
| Marlin (2019) [76] | EE | MaxAcc-MinPow | No | OD, OT | No | ME |
| DiStream (2020) [77] | PS | MaxTh | No | BS, OD | OFF | DE, HE |
| VU (2020) [78] | FT | MinBW-MaxAcc | No | LIP | OFF | EC |
| Clownfish (2020) [79] | ECB | MinBW-MaxAcc | No | AR | ON | EC |
| Spatula (2020) [80] | MC | MinBW-MaxAcc | No | OD, RID | OFF | HE |
| REVAMPT [81] | EE | MinPow-MaxAcc | No | PD, RID, OT | No | HE |
| Anveshak (2021) [82] | MC | MinBW-PerfCon | Yes | OD, RID, OT | No | HE, DE, EC |
| Jang et al. (2021) [83] | SS | MinLat-MaxAcc | No | OD, RID, OT | No | DE |
| OneEdge (2021) [84] | SS | MinLat | No | OD, OT | OFF | HE, DE, EC |
| Yoda (2021) [85] | CE | MaxAcc | No | OD | OFF | N/A |
| PECAM (2021) [86] | SP | MaxPriv-MaxAcc | Yes | GS | N/A | N/A |
| DeepRT (2021) [87] | CE | MaxTh-ResCon | No | OD | Yes | SE |
| CASVA (2022) [88] | ECB | MaxAcc-MinLat | No | OD, SS | OFF | HE |
| MicroEdge (2022) [89] | CE | MaxTh | No | OD, OT, PS | OFF | HE, DE |
| EdgeDuet (2022) [90] | ECB | MaxAcc-MinLat | No | OD | ON | EC |
| Ekya (2022) [91] | CE | MaxAcc | No | OC, OD | OFF | SE |
| Gemel (2023) [92] | CE | MinMem-MacAcc | No | M-DNN | OFF | EC |
| RECL (2023) [93] | CE | MaxAcc | No | OC, OD | ON | HE |
| Runespoor (2023) [41] | ECB | MaxAcc-MinBW | No | SS, OD | OFF | EC |
| REACT (2023) [94] | ECB | MaxAcc | No | OD | No | EC |
| RL-CamSleep (2023) [95] | EE | MinPow | No | OD | No | EC |
| Project (Year) | Sched. | Run-Time Adapt. | Ctrl. Plane | Data Plane | UI | Security | Privacy | Fault Tol. | Obsv. | Sust. | Testbed |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Vigil (2015) [59] | HP | No | No | No | No | No | No | No | No | No | EXP, SIM |
| Glimpse (2015) [61] | No | No | No | No | No | No | No | No | No | No | EXP |
| VideoStorm (2017) [62] | HP | Yes | No | No | No | No | No | No | No | No | EMU |
| OpenFace (2017) [63] | No | No | No | No | No | No | Yes | No | No | No | EXP |
| Lavea (2017) [64] | MILP | Yes | No | Yes | No | No | No | No | No | No | EXP |
| VideoEdge (2018) [65] | BILP | Yes | No | No | No | No | No | No | No | No | EMU |
| AWStream (2018) [66] | HP | Yes | No | No | No | No | No | No | No | No | EMU |
| Chameleon (2018) [67] | N/A | Yes | No | No | No | No | No | No | No | No | EXP |
| Wang et al. (2018) [68] | No | Yes | No | No | No | No | No | No | No | No | EMU |
| EdgeEye (2018) [69] | N/A | No | Yes | Yes | Yes | No | No | No | No | No | EXP |
| VideoPipe (2019) [70] | No | No | No | Yes | No | No | No | No | No | No | EXP |
| FilterForward (2019) [71] | No | Yes | No | No | No | No | No | No | No | No | EXP |
| DeepQuery (2019) [72] | HP | Yes | Yes | Yes | No | No | No | No | No | No | EXP |
| Couper (2019) [73] | UD | No | Yes | Yes | No | No | No | No | Yes | No | EMP |
| HeteroEdge (2019) [74] | HP | Yes | Yes | Yes | No | No | No | No | Yes | No | EXP |
| Liu et al. (2019) [75] | No | Yes | No | No | No | No | No | No | No | No | EXP |
| Marlin (2019) [76] | No | No | No | No | No | No | No | N/A | N/A | Yes | EXP |
| DiStream (2020) [77] | NP | Yes | Yes | Yes | No | No | No | No | No | No | EXP |
| VU (2020) [78] | N/A | Yes | No | Yes | No | No | No | Yes | No | No | EMU |
| Clownfish (2020) [79] | No | Yes | No | No | No | No | No | No | No | No | EMU |
| Spatula (2020) [80] | No | Yes | No | No | No | No | No | No | No | No | EXP |
| REVAMPT [81] | No | No | No | Yes | No | No | Yes | No | No | Yes | EXP |
| Anveshak (2021) [82] | RR | Yes | Yes | Yes | No | No | No | No | No | No | EMU |
| Jang et al. (2021) [83] | No | No | Yes | Yes | No | No | No | No | No | No | EXP |
| OneEdge (2021) [84] | RR | Yes | Yes | Yes | No | No | No | Yes | Yes | No | EMU |
| Yoda (2021) [85] | N/A | Yes | N/A | N/A | No | No | No | No | No | No | EMU |
| PECAM (2021) [86] | N/A | Yes | No | No | No | No | Yes | No | No | No | EXP |
| DeepRT (2021) [87] | HP | Yes | No | No | No | No | No | No | No | No | EXP |
| CASVA (2022) [88] | No | Yes | No | No | No | No | No | No | No | No | SIM |
| MicroEdge (2022) [89] | BP | No | Yes | Yes | No | No | No | No | No | No | EXP |
| EdgeDuet (2022) [90] | HP | Yes | No | No | No | No | No | No | No | No | EXP, SIM |
| Ekya (2022) [91] | HP | Yes | No | No | No | No | No | No | No | No | EMU, SIM |
| Gemel (2023) [92] | HP | Yes | No | No | No | No | No | No | No | No | EXP |
| RECL (2023) [93] | HP | Yes | Yes | Yes | Yes | No | No | No | Yes | No | EXP |
| Runespoor (2023) [41] | No | Yes | No | Yes | No | No | No | No | No | No | EMU |
| REACT (2023) [94] | No | No | Yes | No | No | No | No | No | No | No | EXP |
| RL-CamSleep (2023) [95] | No | Yes | No | No | No | No | No | No | No | Yes | SIM |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ravindran, A.A. Internet-of-Things Edge Computing Systems for Streaming Video Analytics: Trails Behind and the Paths Ahead. IoT 2023, 4, 486-513. https://doi.org/10.3390/iot4040021
Ravindran AA. Internet-of-Things Edge Computing Systems for Streaming Video Analytics: Trails Behind and the Paths Ahead. IoT. 2023; 4(4):486-513. https://doi.org/10.3390/iot4040021
Chicago/Turabian StyleRavindran, Arun A. 2023. "Internet-of-Things Edge Computing Systems for Streaming Video Analytics: Trails Behind and the Paths Ahead" IoT 4, no. 4: 486-513. https://doi.org/10.3390/iot4040021
APA StyleRavindran, A. A. (2023). Internet-of-Things Edge Computing Systems for Streaming Video Analytics: Trails Behind and the Paths Ahead. IoT, 4(4), 486-513. https://doi.org/10.3390/iot4040021