A Proposed Low-Cost Viticulture Stress Framework for Table Grape Varieties



Abstract
1. Introduction
2. Precision Viticulture Systems
2.1. Precision Viticulture Metrics and Indexes towards Stress
2.1.1. Spectroscopy and High Frequency Measurements
Normallized Difference of Vegetation Index (NDVI) [7,8,9,10,20]
Photochemical Reflectance Index (PRI)
Leaf Area Index (LAI)
Soil-Adjusted Vegetation Index (SAVI)
2.1.2. Viticulture Sensors and Metrics
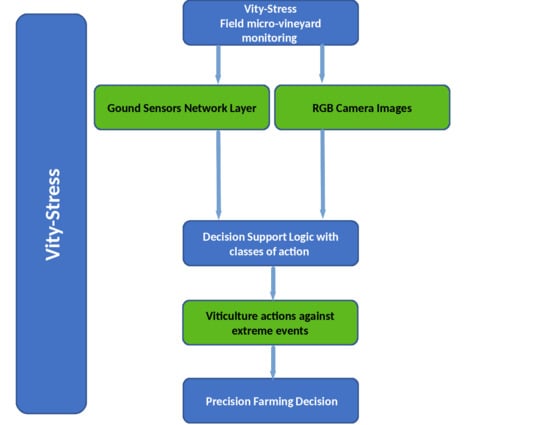
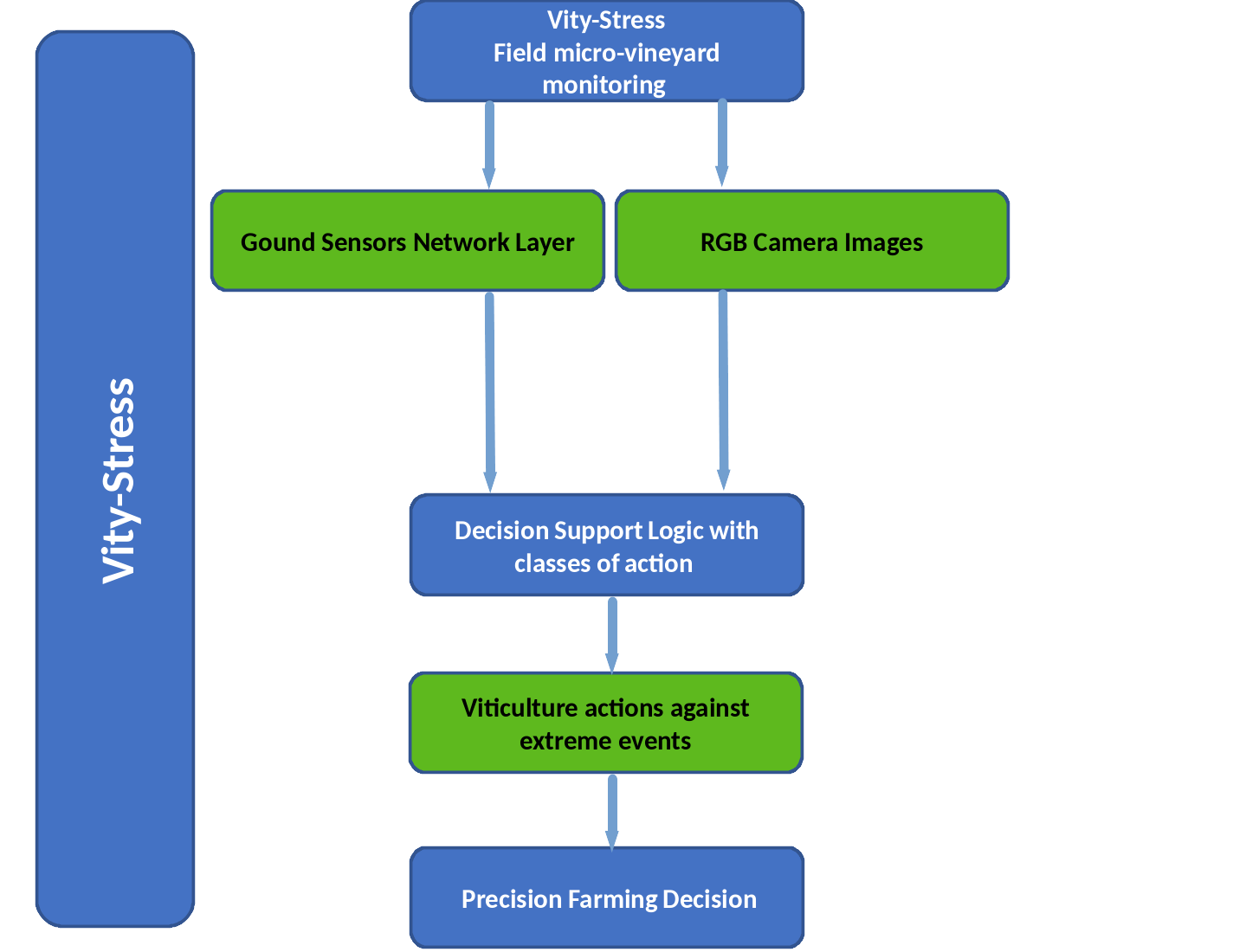
3. The Vity-Stress Framework
- Step 1:
- Identifying and quantifying the impacts of climate change. Concentrating on drought and studying of commonly cultivated variety of table vines. Identifying of variability level/extent within a viticulture field and how climate change affects the qualitative characteristics of the product as well as crop yield are addressed with the use of cheap sensors built in a uniform sensor network.
- Step 2:
- Evaluating the effects. Classification logic using support vector classifier is utilized, based on the acquired measurements from the sensors and micro-climate meteorological station measurements. The significance of the measurements are evaluated and ranked accordingly in hierarchical classes.
- Step 3:
- Visualising the effects in real-time. An additional presentation layer provides classes and measurement visualization for the appropriate GIS service, provided by the framework.
- Step 4:
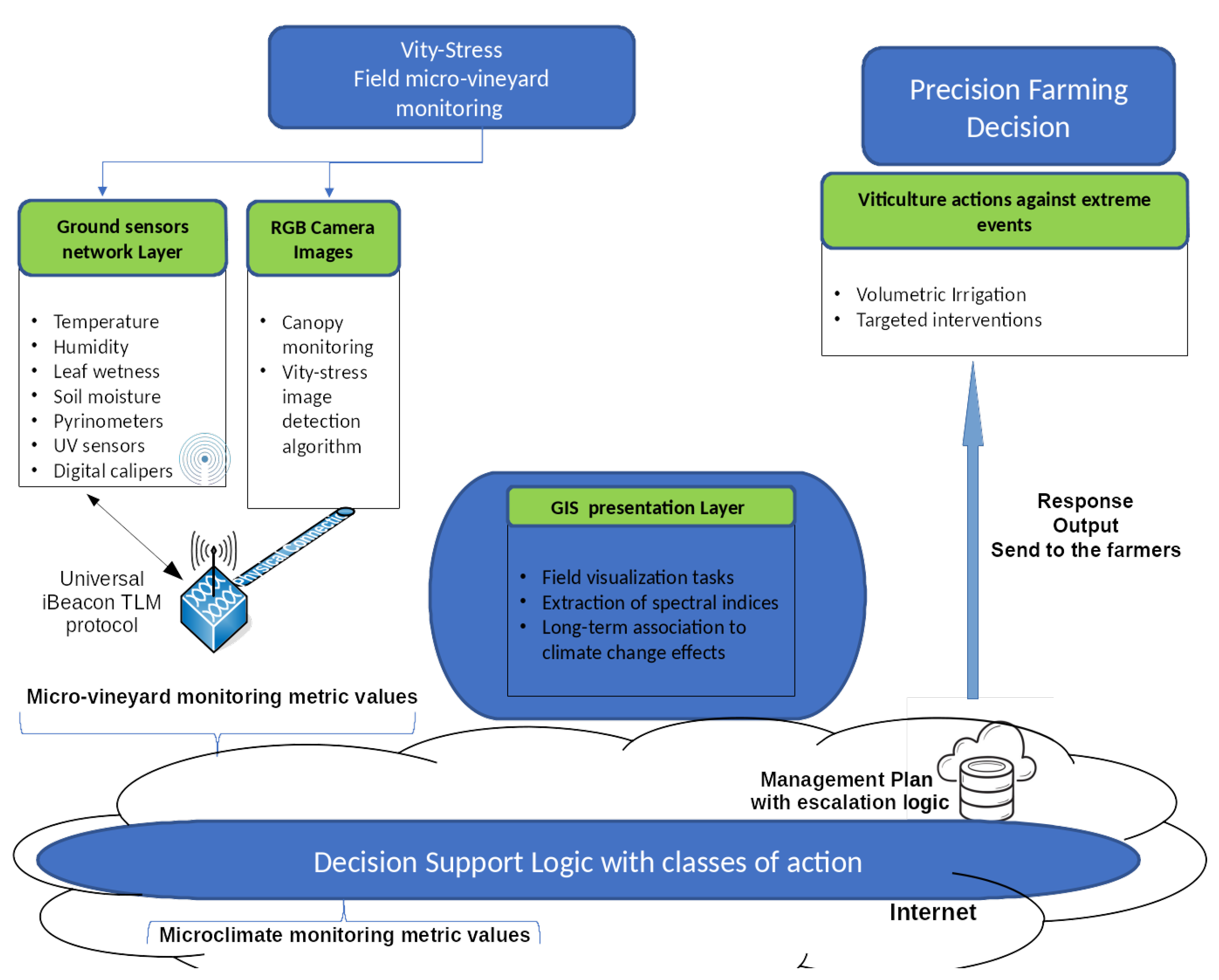
- Providing viticulture stump detailed output response to farmers. Sensors assist the precision protocols’ selection process (assessment methodology as presented at Section 3.1) and facilitate their application, using data mining and machine learning processes. Such incorporation provides GIS real-time measures’ visualization, alerts to farmers on phenomena initiation, predicts its duration, along with indications and sensory trained model feedback for the deployed framework WSN.
3.1. Vity-Stress Framework Assessments
Controlled Irrigation processes
Water harvesting
Irrigating vineyards using wastewater
Using organic fertilizer such as manure
Water constraint natural materials
Appropriate vine pruning techniques
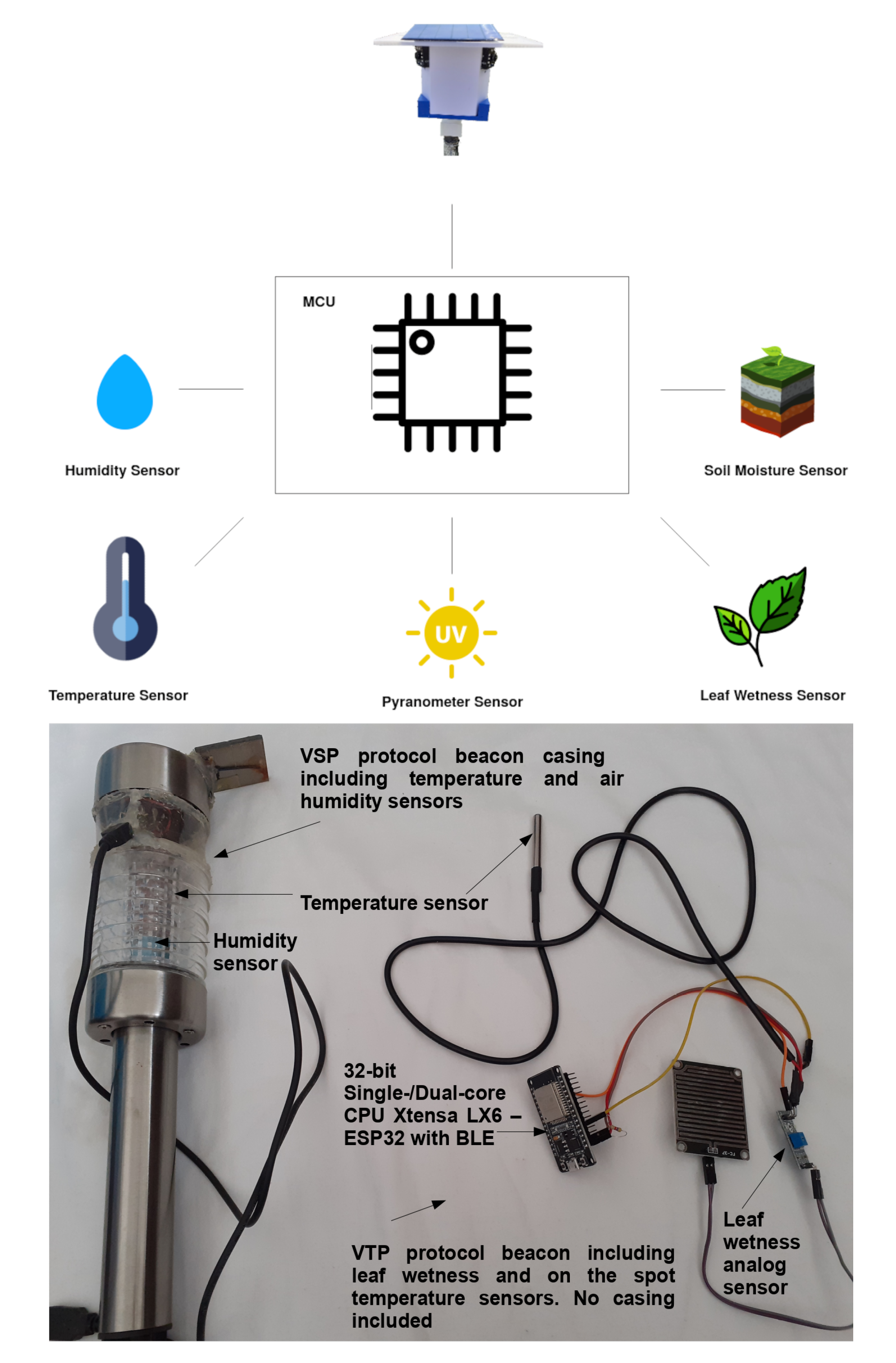
3.2. Vity-Stress Monitoring System
- Temperature and air humidity sensor pack;
- Temperature and leaf moisture sensor pack;
- Temperature and two soil moisture sensors (TDR or resistive) pack;
- Three resistive soil moisture sensors pack;
- Pyranometer and UV (preferably UVA or UVB) sensor pack;
- Leaf wetness and digital caliper pack.
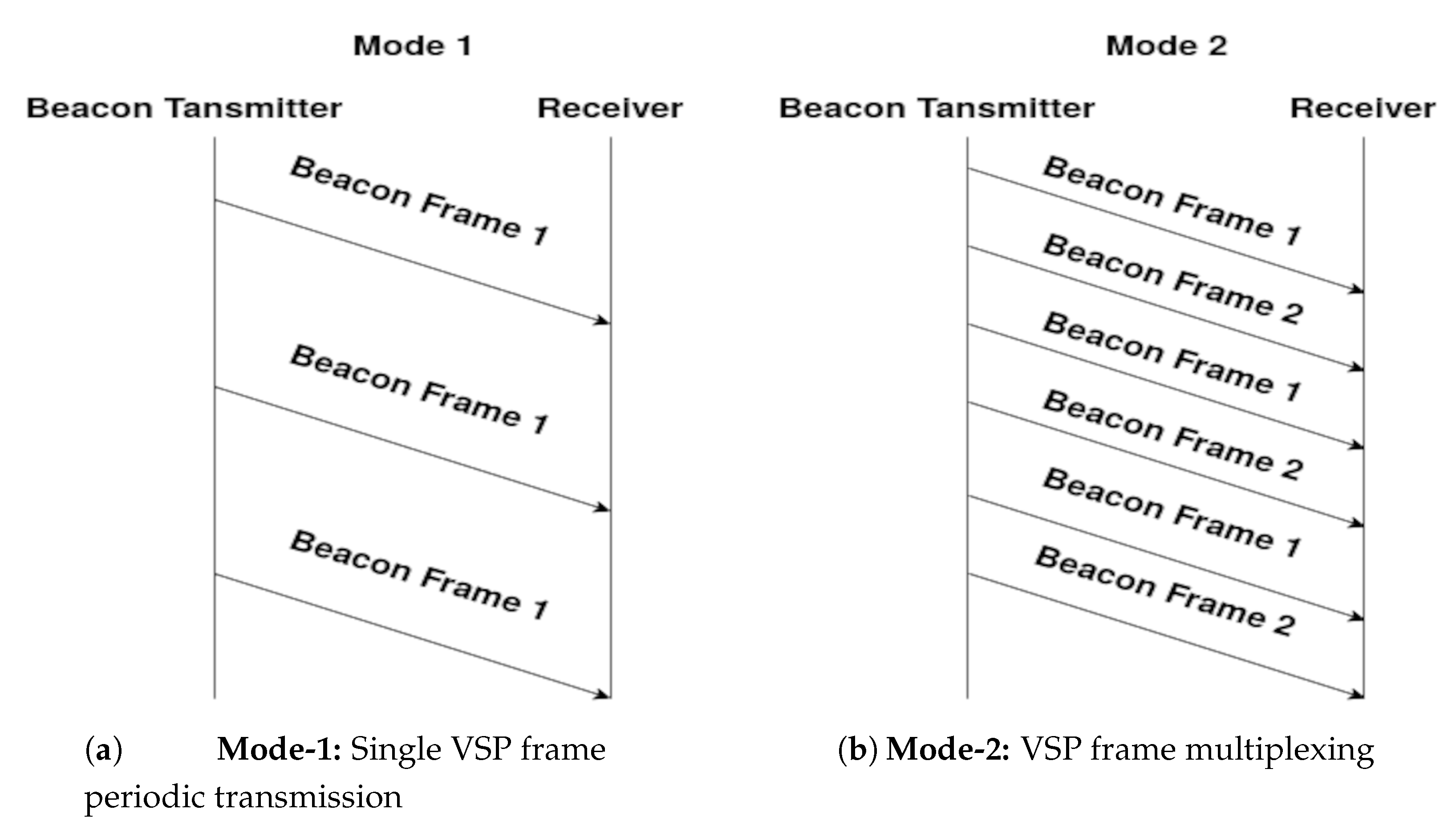
3.3. Proposed Vity-Stress Protocol
- Each beacon device cannot communicate with other beacon device and can only communicate with the concentrator.
- Each beacon device has a unique identifier (UUID).
- Frames are 30 bytes long.
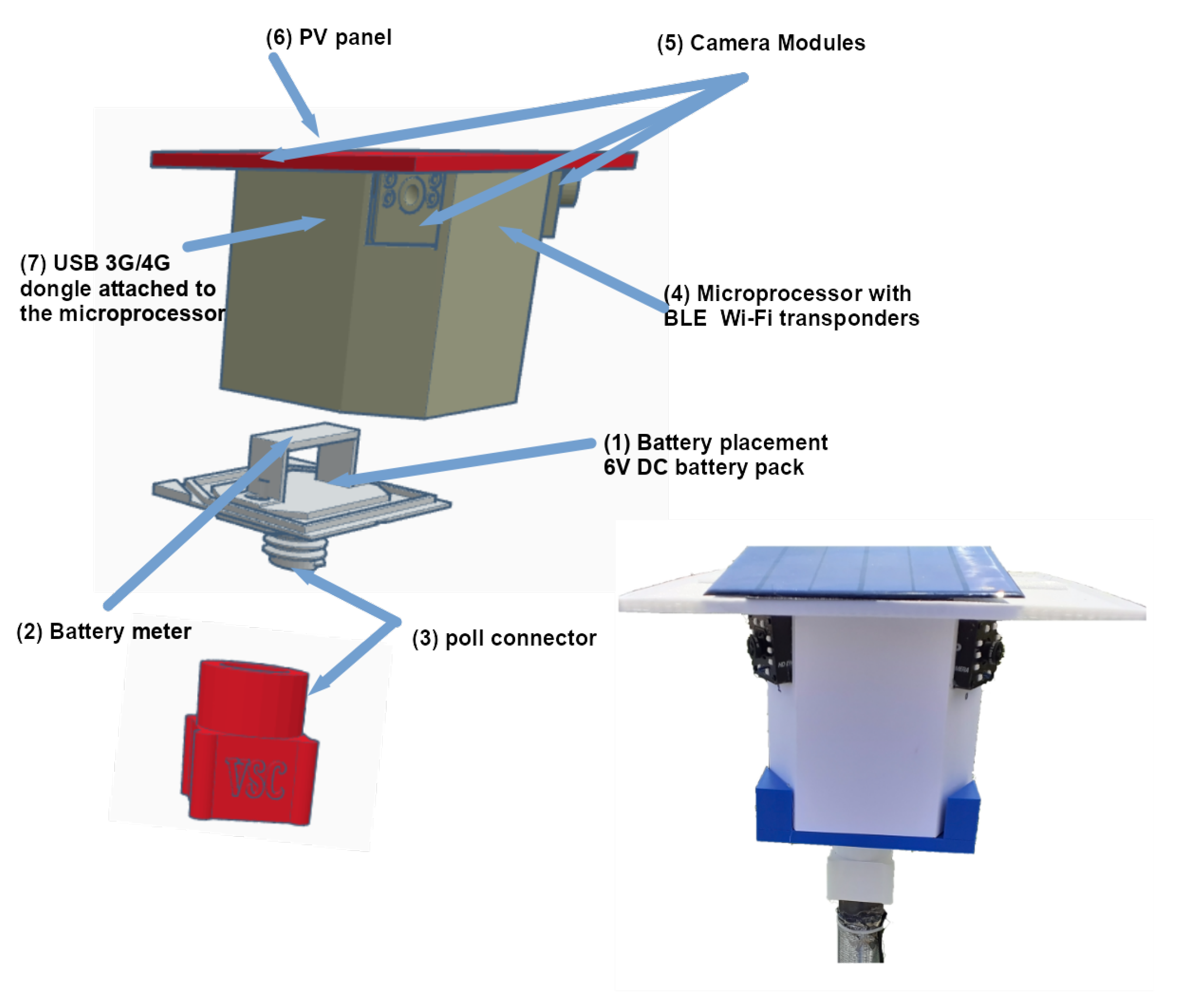
3.4. Vity-Stress Concentrator Architecture
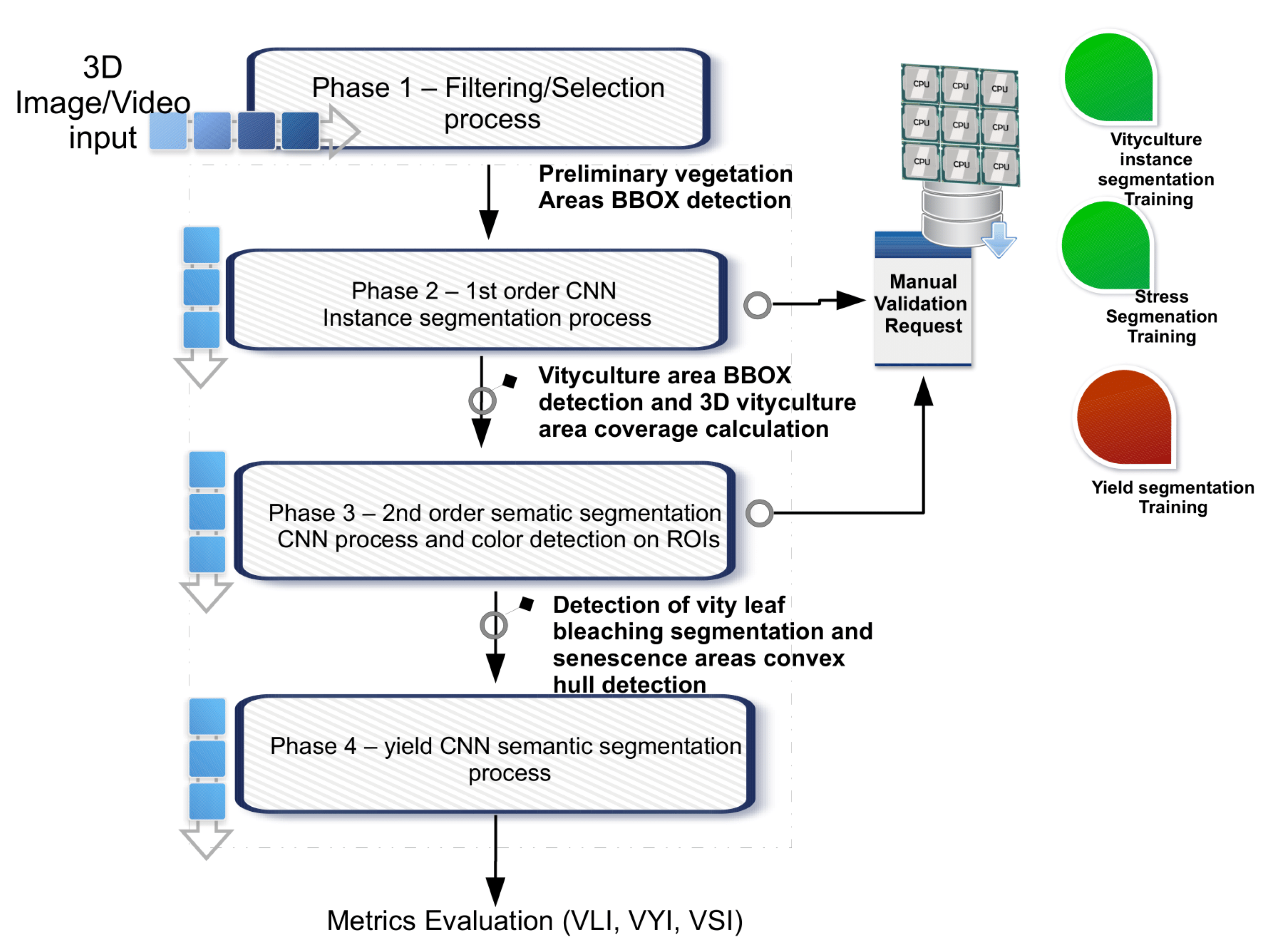
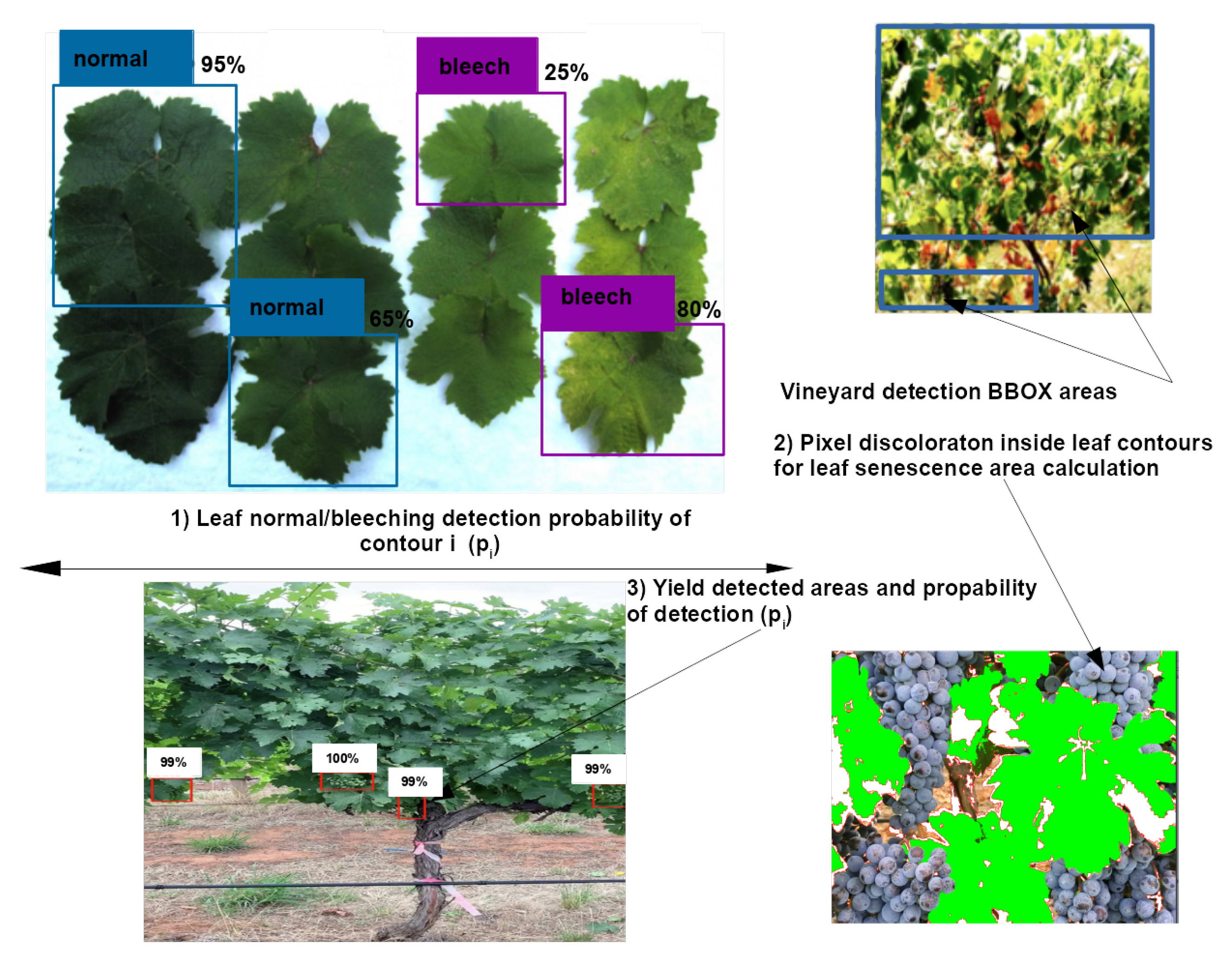
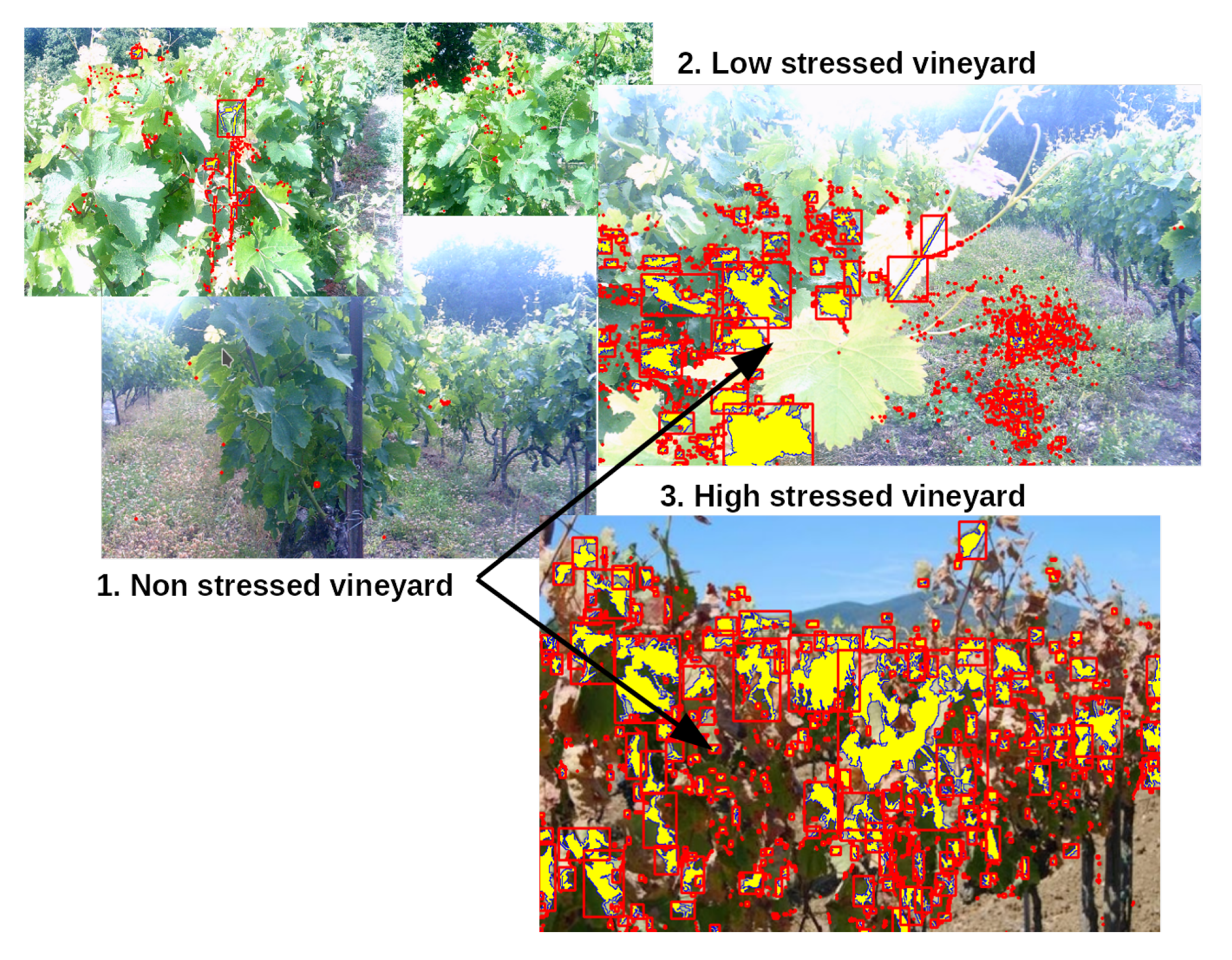
4. Proposed Vity-Stress Image Detection Process
5. Vity-Stress System Experimentation
5.1. Experimental Scenario and Results of the Vity-Stress Protocol
5.2. Validation of the Viticulture Stress Index
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Saadi, S.; Todorovic, M.; Tanasijevic, L.; Pereira, L.S.; Pizzigalli, C.; Lionello, P. Climate change and Mediterranean agriculture: Impacts on winter wheat and tomato crop evapotranspiration, irrigation requirements and yield. Agric. Water Manag. 2015, 147, 103–115. [Google Scholar] [CrossRef]
- Marquardt, D.; Füssel, H.M.; Kehvola, H.M.; Vanneuville, W.; Picatoste, J.; Van Aardenne, J.; Christiansen, T.; Lükewille, A.; Qoul, C.; Kazmierczak, A.; et al. Climate Change Adaptation in the Agriculture Sector in Europe— Climate-ADAPT; Technical Report; European Environment Agency, Publication Office of the European Union: Luxembourg, 2019. [Google Scholar]
- Migliore, G.; Zinnanti, C.; Schimmenti, E.; Borsellino, V.; Schifani, G.; Patrizia Di Franco, C.; Asciuto, A. A Ricardian analysis of the impact of climate change on permanent crops in a Mediterranean region—New Medit. New Medit A Mediterr. J. Econ. Agric. Environ. 2019, 18, 41–52. [Google Scholar]
- Climate Change on Your Plate. 2018. Available online: https://ec.europa.eu/info/news/climate-change-your-plate-2018-dec-03_en (accessed on 3 June 2020).
- Behres, A.; Georgiev, A.; Carraro, M. Future Impacts of Climate Change across Europe; Centre for European Policy Studies: Brussels, Belgium, 2010; Volume 324, ISBN 978-92-9079-972-6. [Google Scholar]
- Miras-Avalos, J.; Intrigliolo, D. Grape composition under Abiotic Constrains: Water stress and Salinity. Front. Plant Sci. 2017, 8, 1718–1836. [Google Scholar] [CrossRef] [PubMed]
- Gerhards, M.; Schlerf, M.; Mallick, K.; Udelhoven, T. Challenges and Future Perspectives of Multi-/Hyperspectral Thermal Infrared Remote Sensing for Crop Water-Stress Detection: A Review. Remote Sens. 2019, 11, 1240. [Google Scholar] [CrossRef]
- Al-Saddik, H.; Simon, J.C.; Cointault, F. Development of Spectral Disease Indices for ‘Flavescence Dorée’ Grapevine Disease Identification. Sensors 2017, 17, 2772. [Google Scholar] [CrossRef]
- Stuart, M.B.; McGonigle, A.J.S.; Willmott, J.R. Hyperspectral Imaging in Environmental Monitoring: A Review of Recent Developments and Technological Advances in Compact Field Deployable Systems. Sensors 2019, 19, 3071. [Google Scholar] [CrossRef]
- Karakizi, C.; Oikonomou, M.; Karantzalos, K. Vineyard Detection and Vine Variety Discrimination from Very High Resolution Satellite Data. Remote Sens. 2016, 8, 235. [Google Scholar] [CrossRef]
- Heryadi, Y.; Miranda, E. Land Cover Classification Based on Sentinel-2 Satellite Imagery Using Convolutional Neural Network Model: A Case Study in Semarang Area, Indoneasia. In Intelligent Information and Database Systems: Recent Developments in Computational Intelligence; Springer: Cham, Switzerland, 2020; Volume 830, pp. 191–206. [Google Scholar]
- Bhanarkar, M.; Korake, P. Soil salinity and moisture measurement system for grapes field by wireless sensor netwrok. Cogent Eng. 2016, 3, 1164021. [Google Scholar] [CrossRef]
- Tomtsis, D.; Kokkonis, G.; Kontogiannis, S. Evaluating existing wireless technologies for IoT data transferring. In Proceedings of the 2017 South Eastern European Design Automation, Computer Engineering, Computer Networks and Social Media Conference (SEEDA-CECNSM), Kastoria, Greece, 23–25 September 2017; Volume 1, pp. 1–4. [Google Scholar] [CrossRef]
- Kontogiannis, S.; Kokkonis, G.; Ellinidou, S.; Valsamidis, S. Proposed Fuzzy-NN Algorithm with LoRaCommunication Protocol for Clustered Irrigation Systems. Future Internet 2017, 9, 78. [Google Scholar] [CrossRef]
- ESA. Available online: https://earth.esa.int/web/guest/-/proba-hrc-1489 (accessed on 15 March 2012).
- NASA. Landsat Programme. 2020. Available online: https://landsat.gsfc.nasa.gov/ (accessed on 12 February 2009).
- Meygret, A.; Baillarin, S.; Gascon, F.; Hillairet, E.; Dechoz, C.; Lacherade, S.; Martimort, P.; Spoto, F.; Henry, P.; Duca, R. SENTINEL-2 image quality and level processing. Int. Soc. Opt. Eng. 2009. [Google Scholar] [CrossRef]
- Giannaros, C.; Kotroni, V.; Lagouvardos, K.; Giannaros, M.T.; Pikridas, C. Assessing the Impact of GNSS ZTD Data Assimilation into the WRF Modeling System during High-Impact Rainfall Events over Greece. Remote Sens. 2020, 12, 383. [Google Scholar] [CrossRef]
- Haralambous, H.; Oikonomou, C.; Pikridas, C.; Lagouvardos, K.; Kotroni, V.; Guerova, G.; Tymvios, F.; Dimitrova, T. Project-Balkan-Mediterranean Real Time Severe Weather Service. In Proceedings of the 2019 IEEE International Geoscience and Remote Sensing Symposium, IGARSS 2019, Yokohama, Japan, 28 July–2 August 2019; pp. 9879–9882. [Google Scholar] [CrossRef]
- Jiang, Z.; Huete, A.; Chen, J.; Chen, Y.; Li, J.; Yan, G.; Zou, Y. Analysis of NVDI and scaled difference vegetation index retrievals of vegetation fraction. Remote Sens. Environ. 2006, 101, 366–378. [Google Scholar] [CrossRef]
- Matsushita, B.; Yang, W.; Chen, J.; Yuyuchi, O.; Guoyu, Q. Sensitivity of the Enhabced Vegetation Index (EVI) and Normalized Difference Vegetation Index (NDVI) to Topographic Effects: A Case Study in High-Density Cypress Forest. Sensors 2007, 7, 2636–2651. [Google Scholar] [CrossRef]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. Hindawi—J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef]
- Gamon, J.; Serrano, L.; Surfus, J. The Photochemical Reflectance Index: An Optical Indicator of Photosynthetic Radiation Use Efficiency across Species, Functional Types, and Nutrient Levels. Oecologia 1997, 112, 492–501. [Google Scholar] [CrossRef]
- Garbulsky, M.F.; Peñuelas, J.; Gamon, J.; Inoue, Y.; Filella, I. The photochemical reflectance index (PRI) and the remote sensing of leaf, canopy and ecosystem radiation use efficiencies: A review and meta-analysis. Remote Sens. Environ. 2011, 115, 281–297. [Google Scholar] [CrossRef]
- Hu, R.; Yan, G.; Mu, X.; Luo, J. Indirect measurement of leaf area index on the basis of path length distribution. Remote Sens. Environ. 2014, 155, 239–247. [Google Scholar] [CrossRef]
- Almutairi, B.; Battay, A.; Belaid, M.; Mohamed, N. Comparative Study of SAVI and NDVI Vegetation Indices in Sulaibiya Area (Kuwait) Using Worldview Satellite Imagry. Int. J. Geosci. Geomat. 2013, 1, 50–53. [Google Scholar]
- Jimenez, A.; Salamance, J.M.; Medina, M.J.Q.; Perez, O.E.A. Crops Diagnosis Using Digital Image Processing and Precision Agriculture Technologies. INGE CUC 2015, 63–71. [Google Scholar] [CrossRef]
- Zinas, N.; Kontogiannis, S.; Kokkonis, G.; Pikridas, C. A novel microclimate forecasting system architecture integrating GPS measurements and meteorological-sensor data. In Proceedings of the Balkan Conference in Informatics, BCI ’13, Thessaloniki, Greece, 19–21 September 2013; pp. 82–88. [Google Scholar] [CrossRef]
- WunderGround. Local Weather Forecast, News and Conditions|Weather Underground. 2007. Available online: https://www.wunderground.com/ (accessed on 3 November 2011).
- Alippi, C.; Boracchi, G.; Camplani, R.; Roveri, M. Wireless Sensor Networks for Monitoring Vineyards. In Methodologies and Technologies for Networked Enterprises: ArtDeco: Adaptive Infrastructures for Decentralised Organisations; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2012; pp. 295–310. [Google Scholar]
- Baker, T.; Miller, E. Weather Swings Affecting Local Farmers’ Crops. 2020. Available online: https://www.wtkr.com/news/weather-swings-affecting-local-farmers-crops (accessed on 3 April 2020).
- Kameoka, S.; Isoda, S.; Hashimoto, A.; Ito, R.; Miyamoto, S.; Wada, G.; Watanabe, N.; Yamakami, T.; Suzuki, K.; Kameoka, T. A Wireless Sensor Network for Growth Environment Measurement and Multi-Band Optical Sensing to Diagnose Tree Vigor. Sensors 2017, 17, 966. [Google Scholar] [CrossRef]
- Zinas, N.; Kontogiannis, S.; Kokkonis, G.; Valsamidis, S.; Kazanidis, I. Proposed open source architecture for Long Range monitoring. The case study of cattle tracking at Pogoniani. In Proceedings of the Pan-Hellenic Conference on Informatics (PCI), PCI 2017, Larissa, Greece, 28–30 September 2017; pp. 157–162. [Google Scholar] [CrossRef]
- Patil, S.; Thorat, S. Vineyard Monitoring and Recommendations using Wireless Sensor Network. In Proceedings of the International Conference on Computing Communication and Energy Systems (ICCCES), Malappuram, India, 26–27 February 2020. [Google Scholar]
- Matese, A.; Di Gennaro, S.F.; Zaldei, A.; Genesio, L.; Vaccari, F.P. A wireless sensor network for precision viticulture: The NAV system. Comput. Electron. Agric. 2009, 69, 51–58. [Google Scholar] [CrossRef]
- E-GVAP. 2014. Available online: https://www.eumetnet.eu/activities/observations-programme/current-activities/e-gvap/ (accessed on 31 July 2014).
- Will, B.; Rolfes, I. A miniaturized soil moisture sensor based on time domain transmissometry. In Proceedings of the IEEE Sensors Applications Symposium (SAS), Queenstown, New Zealand, 18–20 February 2014; pp. 233–236. [Google Scholar] [CrossRef]
- Ferrarezi, R.S.; Dove, S.K.; Iersel, M.W.V. An Automated System for Monitoring Soil Moisture and Controlling Irrigation Using Low-cost Open-source Microcontrollers. HortTechnology 2015, 25, 110–118. [Google Scholar] [CrossRef]
- Gladstones, J. Wine, Terroir and Climate Change; Wakefield Press: Kent Town, CT, USA, 2011; ISBN 978-1-86254-924-1. [Google Scholar]
- Jones, V.G.; Duff, A.; Hall, A.; Myers, W. Spatial Analysis of Climate in Wine Grape Growing Regions in the Western United States. Am. J. Enol. Vitic. 2010, 61, 323–326. [Google Scholar]
- Blanco-Ward, D.; Ribeiro, A.; Barreales, D.; Castro, J.; Verdial, J.; Feliciano, M.; Viceto, C.; Rocha, A.; Carlos, C.; Silveira, C.; et al. Climate change potential effects on grapevine bioclimatic indices: A case study for the Portuguese demarcated Douro Region (Portugal). BIO Web Conf. 2019. [Google Scholar] [CrossRef]
- Vivar, M.; Fuentes, M.; Norton, M.; Makrides, G.; de Bustamante, I. Estimation of sunshine duration from the global irradiance measured by a photovoltaic silicon solar cell. Renew. Sustain. Energy Rev. 2014, 36, 26–33. [Google Scholar] [CrossRef]
- Yang, H.; Li, J.; Yang, J.; Wang, H.; Zou, J.; He, J. Effects of Nitrogen Application Rate and Leaf Age on the Distribution Pattern of Leaf SPAD Readings in the Rice Canopy. PLoS ONE 2014. [Google Scholar] [CrossRef] [PubMed]
- Fraigneau, C. Precision Agriculture—Tools to Measure and Manage Vineyards; Technical Report; School of Geosciences, University of Aberdeen: Aberdeen, Scotland, 2019; Available online: https://www.abdn.ac.uk/geosciences/documents/Precision_Viticulture_tools_Fraigneau.pdf (accessed on 25 May 2019).
- Osypka, P.; Rheinfelden, H. Apparatus for Examining or Monitoring Plants. U.S. Patent 2009/0278555 A1, 12 November 2009. [Google Scholar]
- Andreoli, V.; Cassardo, C.; Lacona, L.T.; Spanna, F. Description and Preliminary Simulations with the Italian Vineyard Integrated Numerical Model for Estimating Physiological Values (IVINE). Agronomy 2019, 9, 94. [Google Scholar] [CrossRef]
- Anschutz, J.; Kome, A.; Nederlof, M.; Neef, R.; Ven, T. Water Harvesting and Soil Oisture Retention; Agromisa Foundation: Wangeningen, The Netherlands, 2003; Volume 2, ISBN 90-77073-40-X. [Google Scholar]
- Etchebarne, F.; Aveni, P.; Escudier, J.; Ojeda, H. Reuse of treated wastewater in viticulture: Can it be an alternative source of nutrient-rich water? In Proceedings of the 41st World Congress Vine Wine, Geneva, Switzerland, 15–19 July 2019; Volume 12, pp. 2161–2172. [Google Scholar] [CrossRef]
- Samra, N.; Kady, M.; Hassan, A.H.; El-Mansi, A. Using some organic fertilizers on Thompson Seedless vineyard. J. Wuhan Univ. Technol.-Mater. Sci. Ed. 2007, 32, 2161–2172. [Google Scholar]
- Lehmann, J.; Amonette, E.; Roberts, K. Role of Biochar in Mitigation of Climate Change. In Handbook of Climate Change and Agroecosystems; World Scientific: Singapore, 2010; pp. 343–363. [Google Scholar] [CrossRef]
- Orykta.gr. Attapulgite. 2020. Available online: https://www.orykta.gr/oryktes-protes-yles-tis-ellados/latomika-orykta/biomihanika-orykta/55-attapoulgitis (accessed on 4 April 2020).
- Akkula, V.S.; Wani, S.P. Zeolites: Potential soil amendments for improving nutrient and water use efficiency and agriculture productivity. Sci. Rev. Chem. Commun. 2018, 8, 1–15. [Google Scholar]
- Apple iBeacon. 2013. Available online: https://developer.apple.com/ibeacon/ (accessed on 8 February 2014).
- Hernández-Rojas, D.L.; Fernández-Caramés, T.M.; Fraga-Lamas, P.; Escudero, C.J. Design and Practical Evaluation of a Family of Lightweight Protocols for Heterogeneous Sensing through BLE Beacons in IoT Telemetry Applications. Sensors 2018, 18, 57. [Google Scholar] [CrossRef] [PubMed]
- Lin, Y.W.; Lin, C.Y. An Interactive Real-Time Locating System Based on Bluetooth Low-Energy Beacon Network. Sensors 2018, 18, 1637. [Google Scholar] [CrossRef]
- Spence, Andrew. Digital Platform Gives Riverland Vineyards an Irrigation Edge. Library Catalog: Theleadsouthaustralia.com.au Section: Primary Industries. 2020. Available online: http://theleadsouthaustralia.com.au/industries/technology/digital-platform-gives-riverland-vineyards-an-irrigation-edge/ (accessed on 22 January 2020).
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 2980–2988. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks. In Advances in Neural Information Processing Systems 28; Cortes, C., Lawrence, N.D., Lee, D.D., Sugiyama, M., Garnett, R., Eds.; Curran Associates, Inc.: Red Hook, NY, USA, 2015; pp. 91–99. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision—ECCV 2016; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VSP Classes in Hex Data | Sensor Type |
|---|---|
| 0x01 | Temperature |
| 0x02 | Humidity |
| 0x04 | Soil moisture |
| 0x08 | Leaf wetness |
| 0x10 | Pyranometer |
| 0x20 | Reserved for future use |
| 0x40 | Reserved for future use |
| 0x80 | Reserved for future use |
| VSP Class | Temperature | Text | Soil Moisture | Leaf Wetness | Pyranometer |
|---|---|---|---|---|---|
| 0x01 | ✔ | ||||
| 0x0A | ✔ | ✔ | |||
| 0x14 | ✔ | ✔ | |||
| 0x11 | ✔ | ✔ | |||
| 0x18 | ✔ | ✔ |
| Distance (m) | Frame Count | Frames Mean Deviation (Case 1–Case 2) | % Packet Loss |
|---|---|---|---|
| 5 | 35,268 | 250 | 2.03 |
| 20 | 31,897 | 2070 | 11.39 |
| 40 | 28,890 | 1048 | 19.75 |
| 60 | 18,890 | 2560 | 47.52 |
| 80 | 5120 | 4150 | 85.77 |
| Distance (m) | RSSI (dBm) | Deviation (Case 1–Case 2) (dBm) |
|---|---|---|
| 5 | −62 | |
| 20 | −68 | |
| 40 | −75 | |
| 60 | −78 | ±4 |
| 80 | −81 | ±2 |
| SSD ROI Confidence ≥0.5 | SSD ROI Confidence ≥0.7 | ||
|---|---|---|---|
| VSI Index Limits | Characterization | VSI Index Limits | Characterization |
| 0.01–0.23 | Non stressed vineyard | 0.01–0.15 | Non stressed vineyard |
| 0.24–0.45 | Low stressed vineyard | 0.16–0.32 | Low stressed vineyard |
| >0.45 | High stressed vineyard | >0.32 | High stressed vineyard |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kontogiannis, S.; Asiminidis, C. A Proposed Low-Cost Viticulture Stress Framework for Table Grape Varieties. IoT 2020, 1, 337-359. https://doi.org/10.3390/iot1020020
Kontogiannis S, Asiminidis C. A Proposed Low-Cost Viticulture Stress Framework for Table Grape Varieties. IoT. 2020; 1(2):337-359. https://doi.org/10.3390/iot1020020
Chicago/Turabian StyleKontogiannis, Sotirios, and Christodoulos Asiminidis. 2020. "A Proposed Low-Cost Viticulture Stress Framework for Table Grape Varieties" IoT 1, no. 2: 337-359. https://doi.org/10.3390/iot1020020
APA StyleKontogiannis, S., & Asiminidis, C. (2020). A Proposed Low-Cost Viticulture Stress Framework for Table Grape Varieties. IoT, 1(2), 337-359. https://doi.org/10.3390/iot1020020