Towards a Low-Cost Precision Viticulture System Using Internet of Things Devices


Abstract
1. Introduction
2. Background Information
3. Related Work
4. System Architecture
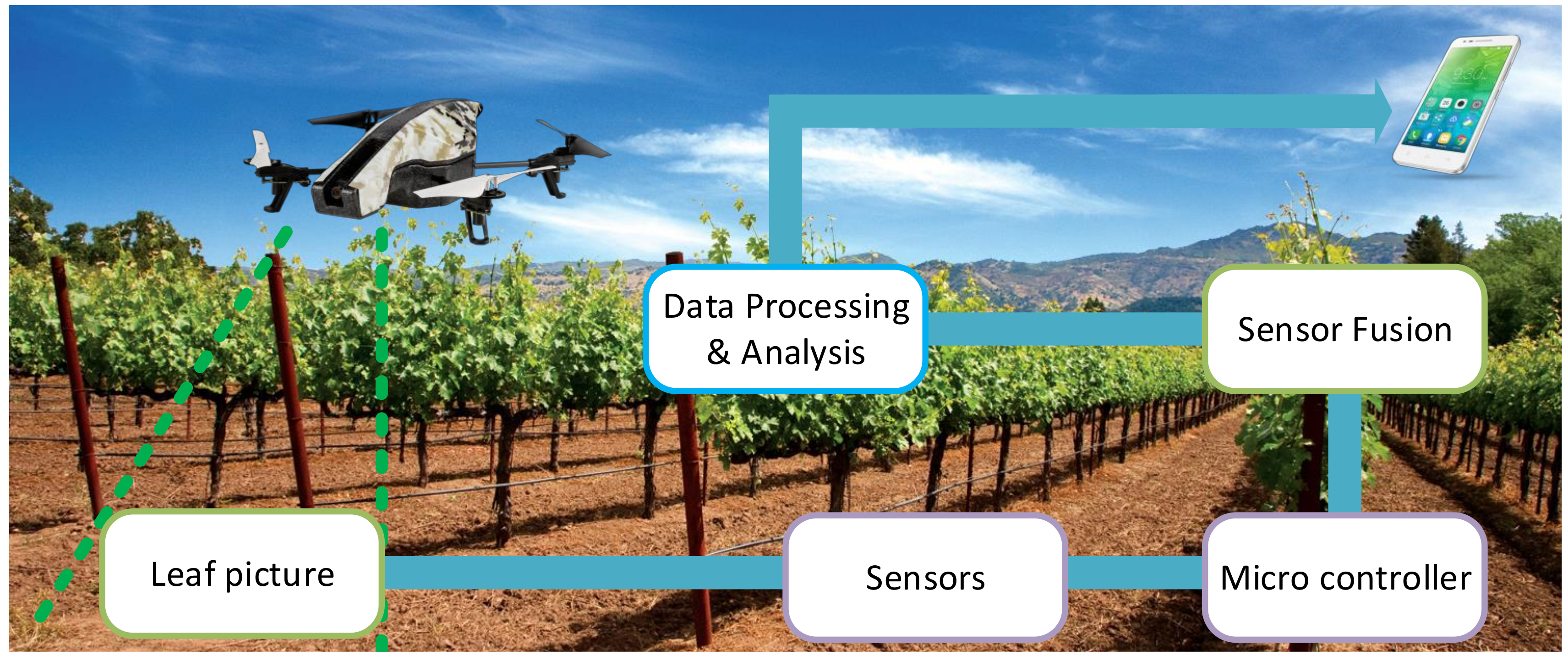
4.1. Application Scenario
- The monitoring node collects environmental information on the plant or the immediate vicinity where the node is located.
- The monitoring node transmits the collected information in a packet toward the destination node through the relay nodes.
- The collected data is then stored in a system containing a database of previous information collected at that location. The system can then analyze the new data with historical records and with existing models which are known for the different diseases in order to determine if conditions are favorable for the development of a disease or the presence of a pest.
- If attention is required the UAV is ordered to the area for surveillance images to be taken. To find the exact location, the UAV uses its GPS.
- Once the UAV reaches the required location it takes images of the area and then it returns to the control room.
- The images taken by the UAV are forwarded to the control room and then to the system administrator.
- Any further actions that need to be taken for the plant are done by the system administrator.
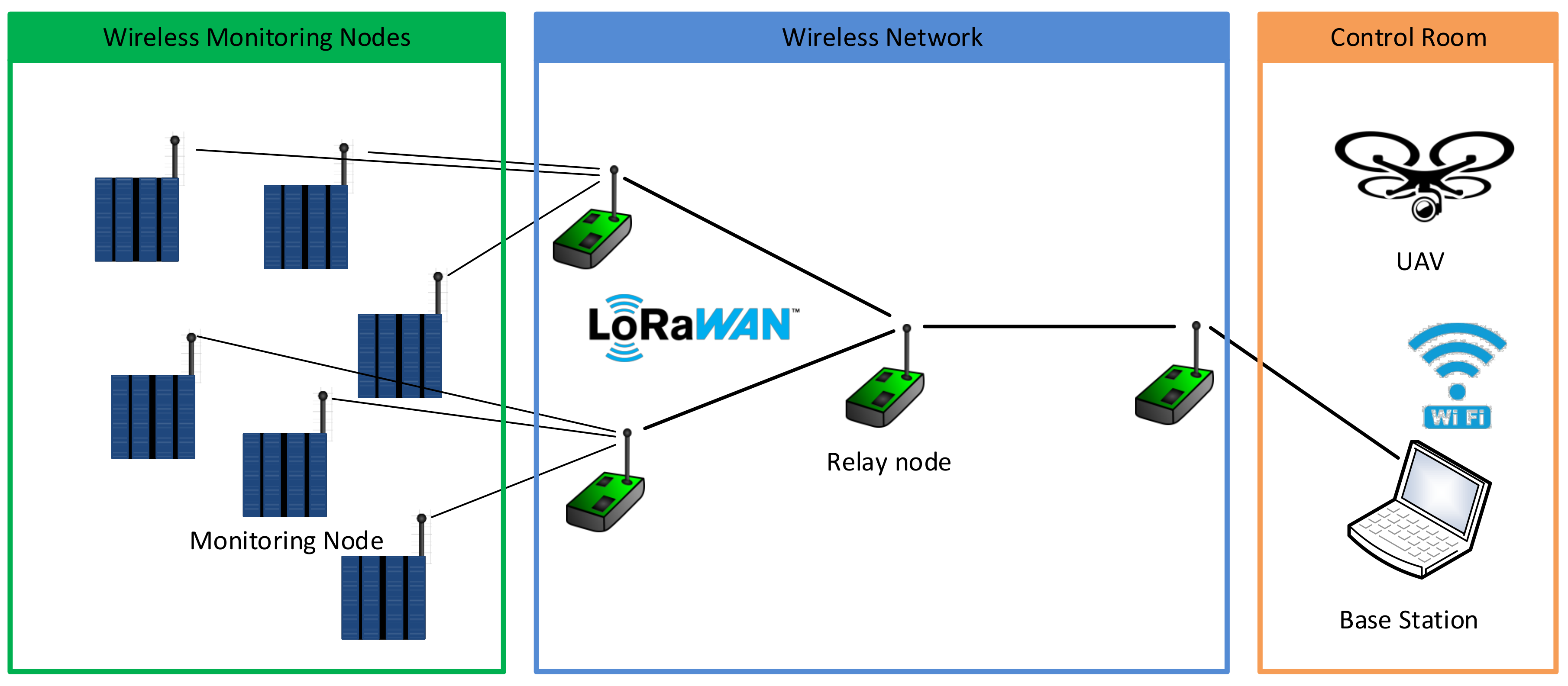
4.2. System Framework
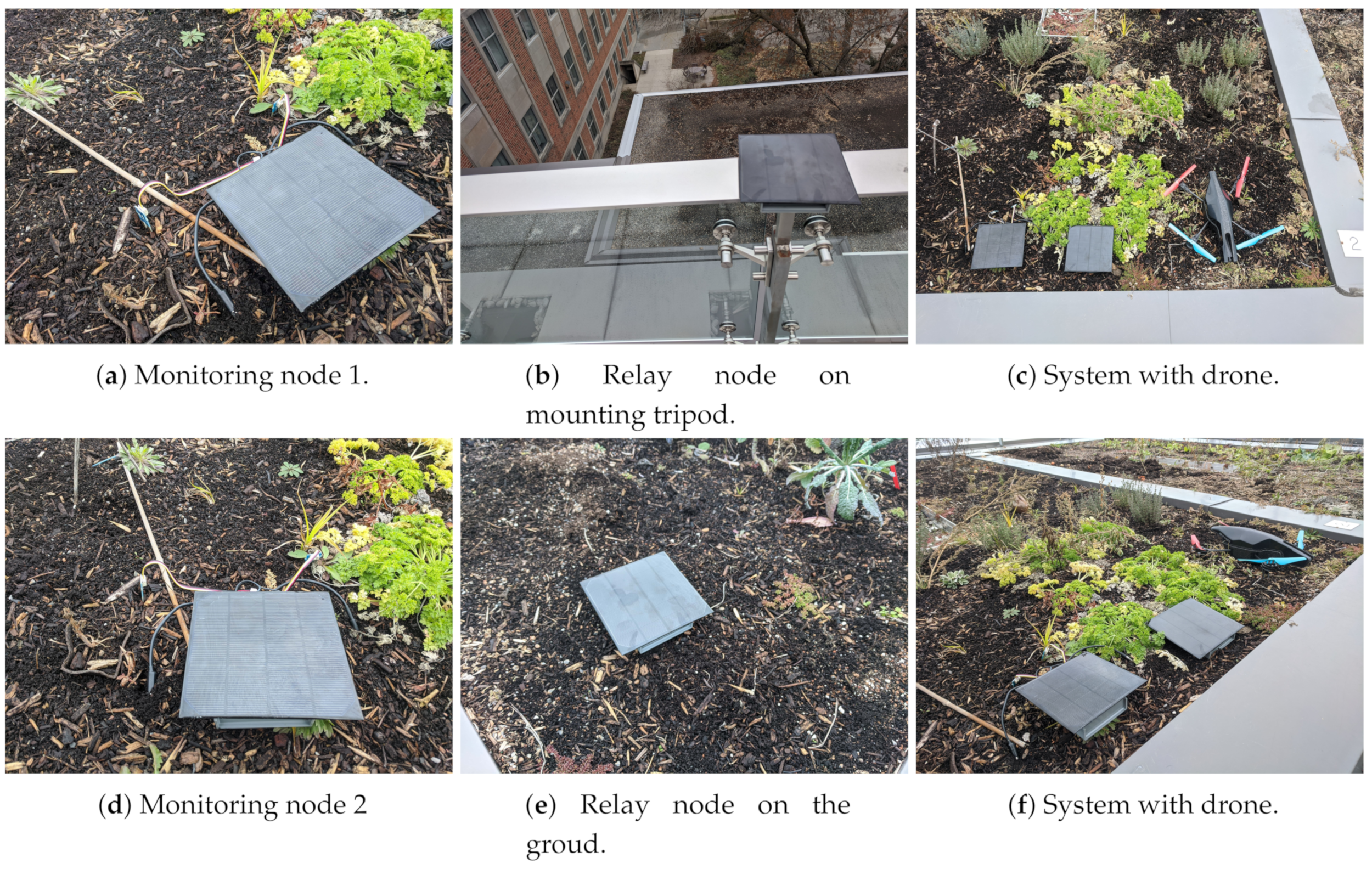
- The first component includes the wireless monitoring nodes. The wireless monitoring nodes are equipped with a low energy processing unit, wired soil and moisture sensors and a wireless communication unit. Each node has four soil moisture and four soil temperature sensors. The nodes are powered through a rechargeable battery. The battery is charged through a solar panel. The sensor data are passed to the processing unit for initial filtering and to form data packets. The data packets are passed to the wireless communication unit to forward them wirelessly to the relay nodes.
- The second important component is the wireless network that forwards all the sensor data from the monitoring nodes to the control room. The network is composed of relay nodes. The relay nodes have only the necessary communication unit to forward the data as well as similar energy harvesting capabilities with the monitoring nodes. However, the relay nodes do not have any sensors. Each relay node is able to receive and to forward the data packets towards the control room.
- The third component is the control room which consists of a computer and a UAV. At the control room, all the data are collected and processed. If the collected data exceeds a predefined threshold, the control room sends a notification to the UAV. The UAV then can maneuver to the points of interest as determined by the sensor nodes.
4.3. Flow Diagrams of the Processes
4.3.1. Monitoring Process
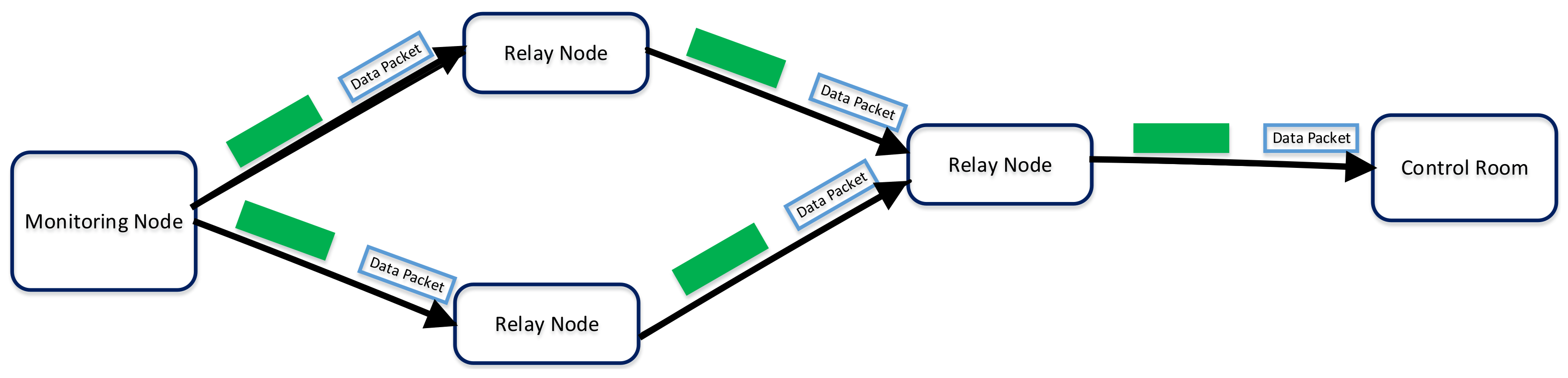
4.3.2. Data Forwarding Process
4.3.3. Image Capture Process
5. Hardware Infrastructure
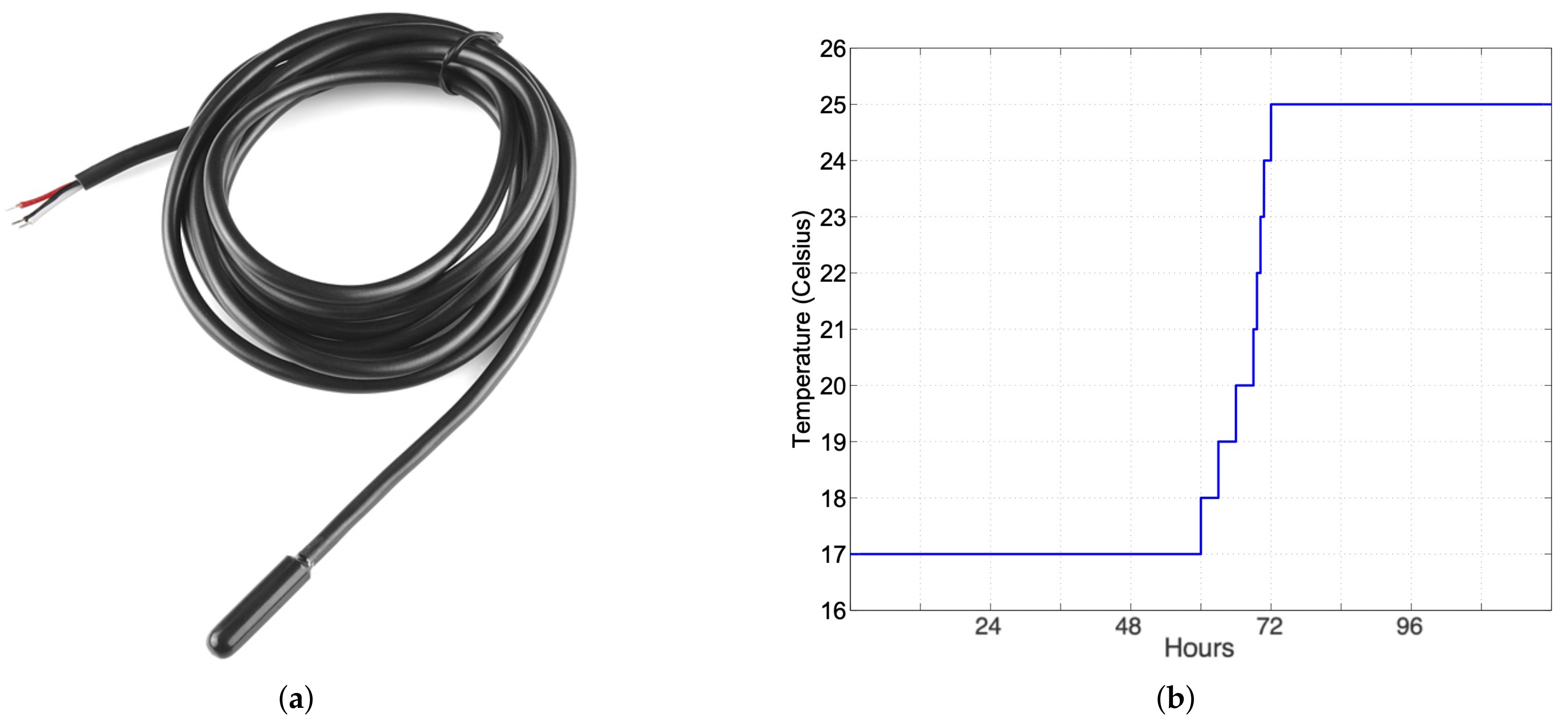
5.1. Sensor Unit
5.2. Processing Unit
5.3. Radio Unit
5.4. UAV
6. Experimental Results
6.1. Energy Consumption
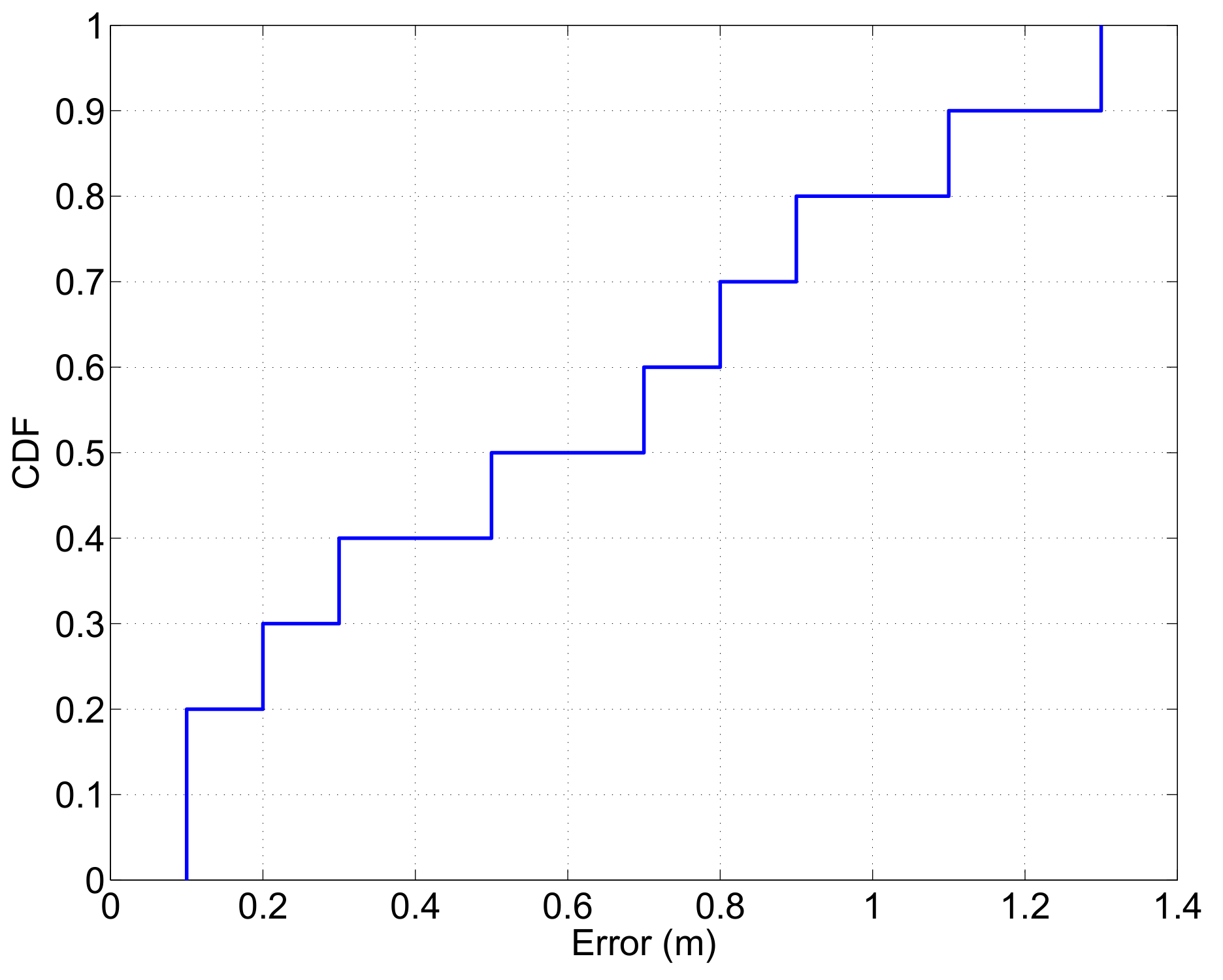
6.2. Location Accuracy
7. Conclusions
Funding
Conflicts of Interest
References
- Mulla, D.J. Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. Biosyst. Eng. 2013, 114, 358–371. [Google Scholar] [CrossRef]
- Ponti, M.; Chaves, A.A.; Jorge, F.R.; Costa, G.B.P.; Colturato, A.; Branco, K.R.L.J.C. Precision Agriculture: Using Low-Cost Systems to Acquire Low-Altitude Images. IEEE Comput. Graph. Appl. 2016, 36, 14–20. [Google Scholar] [CrossRef] [PubMed]
- Hamrita, T.K.; Durrence, J.S.; Vellidis, G. Precision farming practices. IEEE Ind. Appl. Mag. 2009, 15, 34–42. [Google Scholar] [CrossRef]
- Mahaffee, W.F.; Stoll, R. The ebb and flow of airborne pathogens: Monitoring and use in disease management decisions. Phytopathology 2016, 106, 420–431. [Google Scholar] [CrossRef] [PubMed]
- Griffiths, H.; Shen, H.; Li, N.; Rojas, S.; Perkins, N.; Liu, M. Vineyard management in virtual reality: autonomous control of a transformable drone. Proc. SPIE 2017. [Google Scholar] [CrossRef]
- Koshy, S.S.; Nagaraju, Y.; Palli, S.; Prasad, Y.; Pola, N. Wireless Sensor Network based Forewarning Models for Pests and Diseases in Agriculture—A Case Study on Groundnut. Int. J. Adv. Res. Technol. 2014, 3, 74–82. [Google Scholar]
- Qi, F.; Zhu, X.; Mang, G.; Kadoch, M.; Li, W. UAV Network and IoT in the Sky for Future Smart Cities. IEEE Netw. 2019, 33, 96–101. [Google Scholar] [CrossRef]
- Menouar, H.; Guvenc, I.; Akkaya, K.; Uluagac, A.S.; Kadri, A.; Tuncer, A. UAV-Enabled Intelligent Transportation Systems for the Smart City: Applications and Challenges. IEEE Commun. Mag. 2017, 55, 22–28. [Google Scholar] [CrossRef]
- Spachos, P.; Gregori, S. Integration of Wireless Sensor Networks and Smart UAVs for Precision Viticulture. IEEE Internet Comput. 2019, 23, 8–16. [Google Scholar] [CrossRef]
- Malveaux, C.; Hall, S.G.; Price, R. Using drones in agriculture: Unmanned aerial systems for agricultural remote sensing applications. In Proceedings of the 2014 Montreal, Quebec, QC, Canada, 13–16 July 2014; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2014; p. 1. [Google Scholar]
- Elijah, O.; Rahman, T.A.; Orikumhi, I.; Leow, C.Y.; Hindia, M.N. An Overview of Internet of Things (IoT) and Data Analytics in Agriculture: Benefits and Challenges. IEEE Internet Things J. 2018, 5, 3758–3773. [Google Scholar] [CrossRef]
- Carisse, O.; Bacon, R.; Lasnier, J.; McFadden-Smith, W. Identification Guide to the Major Diseases of Grapes [electronic Resource]; Agriculture and Agri-Food Canada: Ottawa, ON, Canada, 2006. [Google Scholar]
- Carroll, J.; Weigle, T. 2016 Organic Production and IPM Guide for Grapes; New York State IPM Program: Geneva, NY, USA, 2016. [Google Scholar]
- Carter, K.; Huffman, L. Impacts of Cold Temperatures on Wine Grapes. 2014. Available online: http://www.omafra.gov.on.ca/english/crops/hort/news/hortmatt/2014/01hrt14a1.htm/ (accessed on 19 February 2020).
- McDonald, B.A.; Stukenbrock, E.H. Rapid emergence of pathogens in agro-ecosystems: global threats to agricultural sustainability and food security. Philos. Trans. R. Soc. Lond. Ser. B Biol. Sci. 2016, 371. [Google Scholar] [CrossRef] [PubMed]
- Jiang, P.; Chen, Y.; Liu, B.; He, D.; Liang, C. Real-Time Detection of Apple Leaf Diseases Using Deep Learning Approach Based on Improved Convolutional Neural Networks. IEEE Access 2019, 7, 59069–59080. [Google Scholar] [CrossRef]
- Latouche, G.; Poutaraud, A.; Bellow, S.; Evain, S.; Ley, L.; Brown, S.C.; Cerovic, Z.G. Detection of downy mildew in the field on grapevine leaves using a new portable fluorescence sensor. In Proceedings of the Seventh International Workshop on Grapevine Downy and Powdery Mildew, Vitoria, Spain, 30 June–4 July 2014; pp. 118–121. [Google Scholar]
- Di Gennaro, S.F.; Battiston, E.; Di Marco, S.; Facini, O.; Matese, A.; Nocentini, M.; Palliotti, A.; Mugnai, L. Unmanned Aerial Vehicle (UAV)-based remote sensing to monitor grapevine leaf stripe disease within a vineyard affected by esca complex. Phytopathol. Mediterr. 2016, 55, 262. [Google Scholar]
- Rilling, S.; Nielsen, M.; Milella, A.; Jestel, C.; Fröhlich, P.; Reina, G. A multisensor platform for comprehensive detection of crop status: Results from two case studies. In Proceedings of the 2017 14th IEEE International Conference on Advanced Video and Signal Based Surveillance (AVSS), Lecce, Italy, 29 August–1 September 2017; pp. 1–6. [Google Scholar]
- Salam, A. Internet of Things for Sustainable Community Development, 1st ed.; Springer Nature: London, UK, 2020. [Google Scholar] [CrossRef]
- Viani, F.; Bertolli, M.; Polo, A. Low-Cost Wireless System for Agrochemical Dosage Reduction in Precision Farming. IEEE Sens. J. 2017, 17, 5–6. [Google Scholar] [CrossRef]
- Viani, F.; Bertolli, M.; Salucci, M.; Polo, A. Low-Cost Wireless Monitoring and Decision Support for Water Saving in Agriculture. IEEE Sens. J. 2017, 17, 4299–4309. [Google Scholar] [CrossRef]
- Seng, K.P.; Ang, L.; Schmidtke, L.M.; Rogiers, S.Y. Computer Vision and Machine Learning for Viticulture Technology. IEEE Access 2018, 6, 67494–67510. [Google Scholar] [CrossRef]
- Dong, X.; Vuran, M.C.; Irmak, S. Autonomous precision agriculture through integration of wireless underground sensor networks with center pivot irrigation systems. Ad Hoc Netw. 2013, 11, 1975–1987. [Google Scholar] [CrossRef]
- González, R.; Rodríguez, F.; Sánchez-Hermosilla, J.; Donaire, J. Navigation techniques for mobile robots in greenhouses. Appl. Eng. Agric. 2009, 25, 153–165. [Google Scholar] [CrossRef]
- Soil Moisture Sensor. Available online: https://www.sparkfun.com/products/13322 (accessed on 19 February 2020).
- Waterproof DS18B20 Digital Temperature Sensor. Available online: https://www.adafruit.com/product/381 (accessed on 19 February 2020).
- Arduino MKR 1300. Available online: https://store.arduino.cc/usa/mkr-wan-1300 (accessed on 19 February 2020).
- Arduino MKR 1010. Available online: https://store.arduino.cc/usa/mkr-wifi-1010 (accessed on 19 February 2020).
- Monsoon Power Monitor. Available online: http://www.msoon.com/LabEquipment/PowerMonitor/ (accessed on 19 February 2020).
- Parrot AR Drone 2.0 Elite Edition. Available online: https://www.parrot.com/global/drones/parrot-ardrone-20-elite-edition (accessed on 19 February 2020).















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Disease | Weather Conditions | Temperature Range (°C) | Time Period |
|---|---|---|---|
| Downy Mildew | Heavy Rain | 22–26 | June–August |
| Powdery Mildew | Overcast | 20–28 | Mid June–August |
| Anthracnose | Rain, Heavy Rain | 20–26 | June–Mid September |
| Grey Mold | Overcast, Rain, Heavy Rain | 15–25 | June–Mid July, September |
| Black Rot | Rain, Heavy Rain | 20–25 | Mid June–July |
| Crown Gall | Heavy Rain | 20–32 | Mid May–Mid July |
| Pest | Target |
|---|---|
| Grape Berry Moth | Grapes |
| Grape Leafhopper | Leaves |
| Japanese Beetles | Leaves and Grapes |
| Spider Mites | Leaves |
| Microcontroller | SAMD21 Cortex-M0+ 32bit low power ARM MCU |
|---|---|
| Power Supply | 5 V |
| Digital I/O Pins | 8 |
| Analog Input Pins | 7 |
| Length × Width | 67.64 mm × 25 mm |
| Technology | Transmission Range (m) | Bitrate (Mbit/s) | Power Requirements | Advantages | Disadvantages |
|---|---|---|---|---|---|
| Wi-Fi | up to 100 | 288.8 | Moderate | High availability, does not require extra hardware | Prone to noise, high energy consumption |
| BLE v4 | up to 60 | 25 | Low | Low energy consumption | Prone to interference |
| LoRaWAN | up to 15000 | 0.05 | Extremely Low | Very long transmission range, low energy consumption | Requires extra hardware |
| MCU | Protocol | Frequency | IEEE Standard |
|---|---|---|---|
| MKR 1010 | Wi-Fi | 2.40–2.50 GHz | 802.11 b/g/n |
| MKR 1010 | BLE v4 | 2.40–2.48 GHz | 802.15.1 |
| MKR 1300 | LoRaWAN | 433/868/915 MHz | 802.11 ah |
| Battery | 1500 mAh LiPo |
|---|---|
| Camera | HD camera 720p, 30 fps video output |
| Flight Time | 18 min |
| Interfaces | Wi-Fi 802.11b/g |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spachos, P. Towards a Low-Cost Precision Viticulture System Using Internet of Things Devices. IoT 2020, 1, 5-20. https://doi.org/10.3390/iot1010002
Spachos P. Towards a Low-Cost Precision Viticulture System Using Internet of Things Devices. IoT. 2020; 1(1):5-20. https://doi.org/10.3390/iot1010002
Chicago/Turabian StyleSpachos, Petros. 2020. "Towards a Low-Cost Precision Viticulture System Using Internet of Things Devices" IoT 1, no. 1: 5-20. https://doi.org/10.3390/iot1010002
APA StyleSpachos, P. (2020). Towards a Low-Cost Precision Viticulture System Using Internet of Things Devices. IoT, 1(1), 5-20. https://doi.org/10.3390/iot1010002