
Driplines Layout Designs Comparison of Moisture Distribution in Clayey Soils, Using Soil Analysis, Calibrated Time Domain Reflectometry Sensors, and Precision Agriculture Geostatistical Imaging for Environmental Irrigation Engineering


Abstract
1. Introduction
2. Materials and Methods
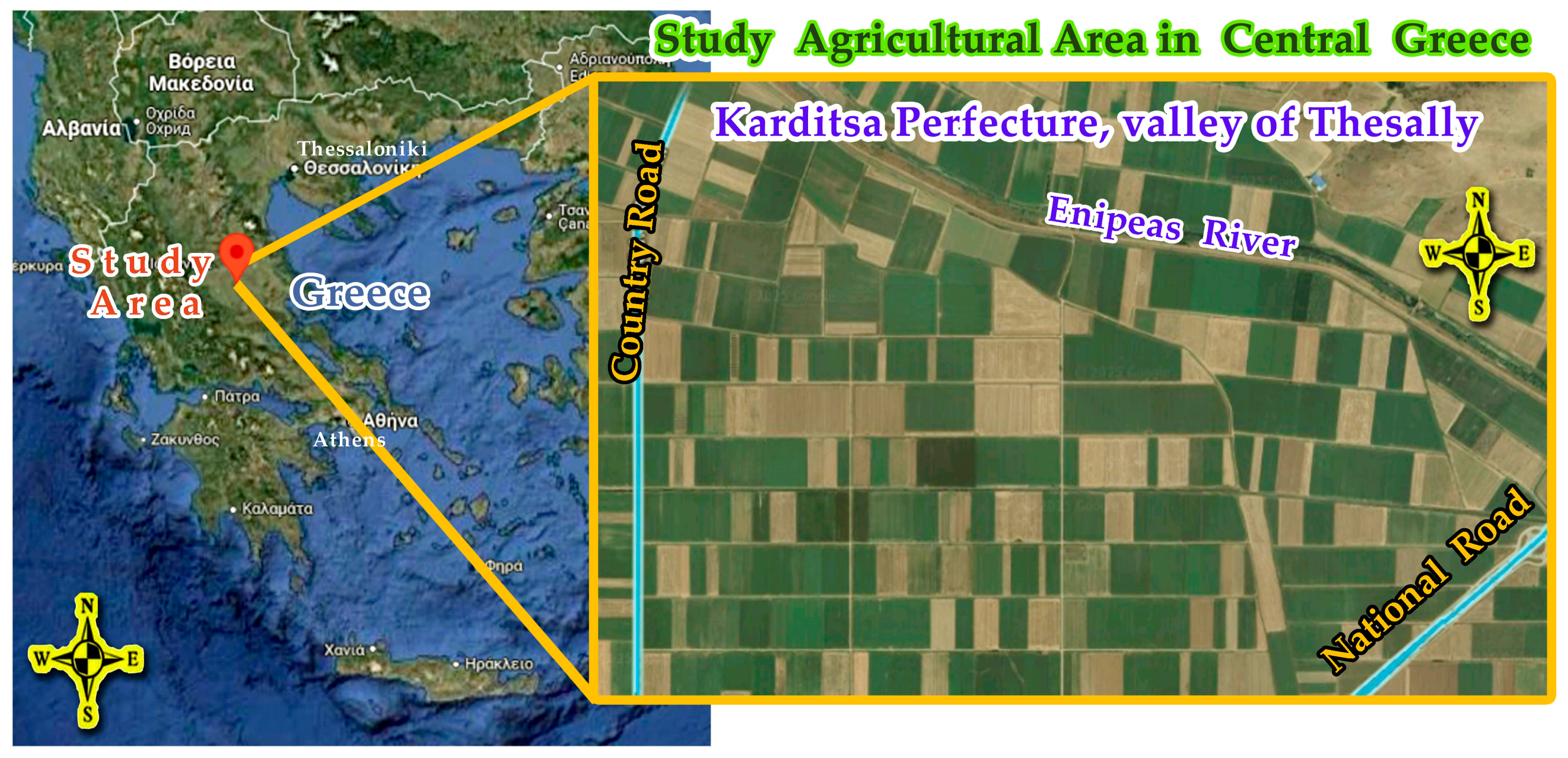
2.1. Study Area and Climatic Conditions
2.2. Sugarbeet Cultivation, Farm Machines, Farm Field Management, Fertilization, and Irrigation Pipeline System Modules and Testing
2.3. Driplines Layout Designs, Soil Moisture Treatments and Setup Under Field Conditions in Clayey Textured Soils
2.4. Sampling of Soil Layers, Laboratory Soil and Hydraulic Analysis
2.5. Soil Moisture TDR Sensor Measurements and Calibration Models Under Field Conditions
2.6. Statistical Analysis and Validation Metrics of Moisture Sensors’ Various Model Calibrations
2.7. Geostatistics Modeling for Soil Characteristics and Moisture GIS Maps Utilizing Precision Agriculture, Exploratory Data Analysis, Interpolation, Modelling and Validation Measures
3. Results and Discussion
3.1. Climate of Experimental Sites and of Emitters’ Testing
3.2. Soil’s Granular and Hydraulic Analyses
3.3. Exploratory Data Analysis and Precision Agriculture Geostatistical Modelling of Soil’s Granular and Hydraulic Parameters
3.4. Results and Discussion of TDR Sensor Measurements of Rootzone Soil Water Content () Under Sugarbeet Field Conditions Using Various Methods of TDR Sensor Calibration
3.5. Validation Statistical Measures of Different Calibration Methods of TDR Sensors Under Sugarbeet Field Conditions
3.6. Results and Discussion of Exploratory Data Analysis and Precision Agriculture Geostatistical Modelling of TDR Sensor Measurements of Rootzone Soil Water Content () Under Sugarbeet Field Conditions Using Various Methods of TDR Sensor Calibration
3.7. Results and Discussion of Best-Fitted Semi-Variogram Models, Spatial Dependence, Geostatistical Mapping–Validation of Soil’s Hydraulic and Granular Characteristics, and Soil’s Water Content () Using Various Sensor Calibration Methods and Model Cross-Validation
4. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Easterling, D.R.; Meehl, G.A.; Parmesan, C.; Changnon, S.A.; Karl, T.R.; Mearns, L.O. Climate extremes: Observations, modeling, and impacts. Science 2000, 289, 2068–2074. [Google Scholar] [CrossRef]
- Tilman, D.; Fargione, J.; Wolff, B.; D’Antonio, C.; Dobson, A.; Howarth, R.; Schindler, D.; Schlesinger, W.H.; Simberloff, D.; Swackhamer, D. Forecasting Agriculturally Driven Global Environmental Change. Science 2001, 292, 281–284. [Google Scholar] [CrossRef] [PubMed]
- Howden, S.M.; Soussana, J.F.; Tubiello, F.N.; Chhetri, N.; Dunlop, M.; Meinke, H. Adapting agriculture to climate change. Proc. Natl. Acad. Sci. USA 2007, 104, 19691–19696. [Google Scholar] [CrossRef]
- Koutseris, Ε.; Filintas, A.; Dioudis, P. Antiflooding prevention, protection, strategic environmental planning of aquatic resources and water purification: The case of Thessalian basin, in Greece. Desalination 2010, 250, 318–322. [Google Scholar] [CrossRef]
- Filintas, A. Land Use Evaluation and Environmental Management of Biowastes, for Irrigation with Processed Wastewaters and Application of Bio-Sludge with Agricultural Machinery, for Improvement-Fertilization of Soils and Crops, with the Use of GIS-Remote Sensing, Precision Agriculture and Multicriteria Analysis. Ph.D. Thesis, University of the Aegean, Mitilini, Greece, 2011. [Google Scholar]
- Stamatis, G.; Parpodis, K.; Filintas, A.; Zagana, E. Groundwater quality, nitrate pollution and irrigation environmental management in the Neogene sediments of an agricultural region in central Thessaly (Greece). Environ. Earth Sci. 2011, 64, 1081–1105. [Google Scholar] [CrossRef]
- Dymond, S.F.; Bradford, J.B.; Bolstad, P.V.; Kolka, R.K.; Sebestyen, S.D.; DeSutter, T.M. Topographic, edaphic, and vegetative controls on plant available water. Ecohydrology 2017, 10, e1897. [Google Scholar] [CrossRef]
- Liu, X.; Lai, Q.; Yin, S.; Bao, Y.; Qing, S.; Bayarsaikhan, S.; Bu, L.; Mei, L.; Li, Z.; Niu, J.; et al. Exploring grassland ecosystem water use effiency using indicators of precipitation and soil moisture across the Mongolian Plateau. Ecol. Indic. 2022, 142, 109207. [Google Scholar] [CrossRef]
- Earles, J.M.; Stevens, J.T.; Sperling, O.; Orozco, J.; North, M.P.; Zwieniecki, M.A. Extreme mid-winter drought weakens tree hydraulic–carbohydrate systems and slows growth. New Phytol. 2018, 219, 89–97. [Google Scholar] [CrossRef]
- Filintas, A. Soil Moisture Depletion Modelling Using a TDR Multi-Sensor System, GIS, Soil Analyzes, Precision Agriculture and Remote Sensing on Maize for Improved Irrigation-Fertilization Decisions. Eng. Proc. 2021, 9, 36. [Google Scholar] [CrossRef]
- Raczka, N.C.; Carrara, J.E.; Brzostek, E.R. Plant–microbial responses to reduced precipitation depend on tree species in a temperate forest. Glob. Change Biol. 2022, 28, 5820–5830. [Google Scholar] [CrossRef]
- Filintas, A.; Nteskou, A.; Kourgialas, N.; Gougoulias, N.; Hatzichristou, E. A Comparison between Variable Deficit Irrigation and Farmers’ Irrigation Practices under Three Fertilization Levels in Cotton Yield (Gossypium hirsutum L.) Using Precision Agriculture, Remote Sensing, Soil Analyses, and Crop Growth Modeling. Water 2022, 14, 2654. [Google Scholar] [CrossRef]
- Adams, P.W.; Flint, A.L.; Fredriksen, R.L. Long-term patterns in soil moisture and revegetation after a clearcut of a Douglas-fir forest in Oregon. For. Ecol. Manag. 1991, 41, 249–263. [Google Scholar] [CrossRef]
- Rodriguez-Iturbe, I.; D’Odorico, P.; Porporato, A.; Ridolfi, L. On the spatial and temporal links between vegetation, climate, and soil moisture. Water Resour. Res. 1999, 35, 3709–3722. [Google Scholar] [CrossRef]
- Detto, M.; Montaldo, N.; Albertson, J.D.; Mancini, M.; Katul, G. Soil moisture and vegetation controls on evapotranspiration in a heterogeneous Mediterranean ecosystem on Sardinia, Italy. Water Resour. Res. 2006, 42, W08419. [Google Scholar] [CrossRef]
- Tromp-van Meerveld, H.J.; McDonnell, J.J. On the interrelations between topography, soil depth, soil moisture, transpiration rates and species distribution at the hillslope scale. Adv. Water Resour. 2006, 29, 293–310. [Google Scholar] [CrossRef]
- Troch, P.A.; Martinez, G.F.; Pauwels, V.R.N.; Durcik, M.; Sivapalan, M.; Harman, C.; Brooks, P.D.; Gupta, H.; Huxman, T. Climate and vegetation water use efficiency at catchment scales. Hydrol. Process. 2009, 23, 2409–2414. [Google Scholar] [CrossRef]
- Breshears, D.B.; Myers, O.B.; Barnes, F.J. Horizontal heterogeneity in the frequency of plant-available water with woodland intercanopy-canopy vegetation patch type rivals that occurring vertically by soil depth. Ecohydrology 2009, 2, 503–519. [Google Scholar] [CrossRef]
- Cavanaugh, M.L.; Kurc, S.A.; Scott, R.L. Evapotranspiration partitioning in semiarid shrubland ecosystems: A two-site evaluation of soil moisture control on transpiration. Ecohydrology 2011, 4, 671–681. [Google Scholar] [CrossRef]
- Filintas, A.; Gougoulias, N.; Kourgialas, N.; Hatzichristou, E. Management Soil Zones, Irrigation, and Fertigation Effects on Yield and Oil Content of Coriandrum sativum L. Using Precision Agriculture with Fuzzy k-Means Clustering. Sustainability 2023, 15, 13524. [Google Scholar] [CrossRef]
- Deardorff, J.W. A parameterization of ground-surface moisture content for use in atmospheric prediction models. J. Appl. Meteorol. (1962–1982) 1977, 16, 1182–1185. [Google Scholar] [CrossRef]
- Delworth, T.; Manabe, S. Climate variability and land surface processes. Adv. Water Resour. 1993, 16, 3–20. [Google Scholar] [CrossRef]
- Jung, M.; Reichstein, M.; Ciais, P.; Seneviratne, S.I.; Sheffield, J.; Goulden, M.L.; Bonan, G.; Cescatti, A.; Chen, J.; De Jeu, R.; et al. Recent decline in the global land evapotranspiration trend due to limited moisture supply. Nature 2010, 467, 951–954. [Google Scholar] [CrossRef] [PubMed]
- Mittelbach, H.; Lehner, I.; Seneviratne, S.I. Comparison of four soil moisture sensor types under field conditions in Switzerland. J. Hydrol. 2012, 430–431, 39–49. [Google Scholar] [CrossRef]
- Koutseris, Ε.; Filintas, A.; Dioudis, P. Environmental control of torrents environment: One valorisation for prevention of water flood disasters. WIT Trans. Ecol. Environ. 2007, 104, 249–259. [Google Scholar] [CrossRef]
- Scott, R.L. Using watershed water balance to evaluate the accuracy of eddy covariance evaporation measurements for three semiarid ecosystems. Agric. For. Meteorol. 2010, 150, 219–225. [Google Scholar] [CrossRef]
- Garten, C.T., Jr.; Classen, A.T.; Norby, R.J. Soil moisture surpasses elevated CO2 and temperature as a control on soil carbon dynamics in a multi-factor climate change experiment. Plant. Soil 2009, 319, 85–94. [Google Scholar] [CrossRef]
- Dioudis, P.; Filintas, A.; Koutseris, E. GPS and GIS based N-mapping of agricultural fields’ spatial variability as a tool for non-polluting fertilization by drip irrigation. Int. J. Sustain. Dev. Plann. 2009, 4, 210–225. [Google Scholar] [CrossRef]
- Holsten, A.; Vetter, T.; Vohland, K.; Krysanova, V. Impact of climate change on soil moisture dynamics in Brandenburg with a focus on nature conservation areas. Ecol. Model. 2009, 220, 2076–2087. [Google Scholar] [CrossRef]
- Filintas, A.; Dioudis, P.; Prochaska, C. GIS modeling of the impact of drip irrigation, of water quality and of soil’s available water capacity on Zea mays L, biomass yield and its biofuel potential. Desalination Water Treat. 2010, 13, 303–319. [Google Scholar] [CrossRef]
- Falloon, P.; Jones, C.D.; Ades, M.; Paul, K. Direct soil moisture controls of future global soil carbon changes: An important source of uncertainty. Glob. Biogeochem. Cycles 2011, 25, GB3010. [Google Scholar] [CrossRef]
- Filintas, A.; Wogiatzi, E.; Gougoulias, N. Rainfed cultivation with supplemental irrigation modelling on seed yield and oil of Coriandrum sativum L. using precision agriculture and GIS moisture mapping. Water Supply 2021, 21, 2569–2582. [Google Scholar] [CrossRef]
- Broedel, E.; Tomasella, J.; Cândido, L.A.; Randow, C. Deep soil water dynamics in an undisturbed primary forest in central mazonia: Diffrences between normal years and the 2005 drought. Hydrol. Process. 2017, 31, 1749–1759. [Google Scholar] [CrossRef]
- Rigden, A.J.; Salvucci, G.D.; Entekhabi, D.; Short Gianotti, D.J. Partitioning evapotranspiration over the continental United States using weather station data. Geophys. Res. Lett. 2018, 45, 9605–9613. [Google Scholar] [CrossRef]
- Jiao, L.; An, W.; Li, Z.; Gao, G.; Wang, C. Regional variation in soil water and vegetation characteristics in the Chinese Loess Plateau. Ecol. Indic. 2020, 115, 106399. [Google Scholar] [CrossRef]
- Filintas, A.; Nteskou, A.; Katsoulidi, P.; Paraskebioti, A.; Parasidou, M. Rainfed and Supplemental Irrigation Modelling 2D GIS Moisture Rootzone Mapping on Yield and Seed Oil of Cotton (Gossypium hirsutum) Using Precision Agriculture and Remote Sensing. Eng. Proc. 2021, 9, 37. [Google Scholar] [CrossRef]
- Falkenmark, M.; Rockström, J. Balancing Water for Humans and Nature. The New Approach in Ecohydrology; Earthscan: London, UK, 2004; p. 247. [Google Scholar]
- Kalavrouziotis, I.K.; Filintas, A.T.; Koukoulakis, P.H.; Hatzopoulos, J.N. Application of multicriteria analysis in the Management and Planning of Treated Municipal Wastewater and Sludge reuse in Agriculture and Land Development: The case of Sparti’s Wastewater Treatment Plant, Greece. Fresenious Environ. Bull. 2011, 20, 287–295. [Google Scholar]
- Bonan, G. Ecological Climatology: Concepts and Applications, 1st ed.; Cambridge University Press: Cambridge, UK, 2002; p. 690. [Google Scholar]
- Zhang, J.; Wu, L.; Dong, W. Land-atmosphere Coupling and Summer Climate Variability over East Asia. J. Geophys. Res. 2011, 116, D05117. [Google Scholar] [CrossRef]
- Vogel, M.M.; Orth, R.; Cheruy, F.; Hagemann, S.; Lorenz, R.; van den Hurk, B.J.J.M.; Seneviratne, S.I. Regional Amplification of Projected Changes in Extreme Temperatures Strongly Controlled by Soil Moisture-Temperature Feedbacks. Geophys. Res. Lett. 2017, 44, 1511–1519. [Google Scholar] [CrossRef]
- Zhou, S.; Williams, A.P.; Berg, A.M.; Cook, B.I.; Zhang, Y.; Hagemann, S.; Lorenz, R.; Seneviratne, S.I.; Gentine, P. Land–atmosphere Feedbacks Exacerbate Concurrent Soil Drought and Atmospheric Aridity. Proc. Natl. Acad. Sci. USA 2019, 116, 18848–18853. [Google Scholar] [CrossRef]
- Seneviratne, S.; Lüthi, D.; Litschi, M.; Schar, C. Land–atmosphere Coupling and Climate Change in Europe. Nature 2006, 443, 205–209. [Google Scholar] [CrossRef]
- Schmugge, T.; Jackson, T.J.; McKim, H.L. Survey of methods for soil moisture determination. Water Resour. Res. 1980, 16, 961–979. [Google Scholar] [CrossRef]
- Lunt, I.A.; Hubbard, S.S.; Rubin, Y. Soil moisture content estimation using ground-penetrating radar reflection data. J. Hydrol. 2005, 307, 254–269. [Google Scholar] [CrossRef]
- Stafford, J.V. Remote, non-contact and in situ measurement of soil moisture content: A review. J. Agric. Eng. Res. 1988, 41, 151–172. [Google Scholar] [CrossRef]
- Evett, S.R.; Parkin, G.W. Advances in soil water content sensing: The continuing maturation of technology and theory. Vadose Zone J. 2005, 4, 986–991. [Google Scholar] [CrossRef]
- Muñoz-Carpena, R. Field Devices for Monitoring Soil Water Content; Publication #BUL343; Agricultural and Biological Engineering Department, University of Florida: Gainesville, FL, USA, 2012; Available online: https://edis.ifas.ufl.edu/publication/AE266 (accessed on 22 April 2025).
- Puma, M.J.; Celia, M.A.; Rodriguez-Iturbe, R.; Guswa, A.J. Functional relationship to describe temporal statistics of soil moisture averaged over different depths. Adv. Water Resour. 2005, 28, 553–566. [Google Scholar] [CrossRef]
- Mattikalli, N.M.; Engman, E.T.; Ahuja, L.R.; Jackson, T.J. Microwave remote sensing of soil moisture for estimation of profile soil property. Int. J. Remote Sens. 1998, 19, 1751–1767. [Google Scholar] [CrossRef]
- Engman, E.T.; Gurney, R.J. Remote Sensing in Hydrology Remote Sensing Applications; Chapman & Hall: London, UK, 1991; p. 225. [Google Scholar]
- Chanasyk, D.S.; Naeth, M.A. Field measurement of soil moisture using neutron probe. Can. J. Soil Sci. 1996, 76, 317–323. [Google Scholar] [CrossRef]
- Evett, S.R. Some Aspects of Time Domain Reflectometry (TDR), Neutron Scattering, and Capacitance Methods of Soil Water Content Measurement. In Comparison of Soil Water Measurement Using the Neutron Scattering, Time Domain Reflectometry and Capacitance Methods; IAEA-TECDOC-1137; International Atomic Energy Agency (IAEA): Vienna, Austria, 2000. [Google Scholar]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.L. Measurement of soil water content using time-domain reflectometry: A field evaluation. Soil Sci. Soc. Am. J. 1985, 49, 19–24. [Google Scholar] [CrossRef]
- Zegelin, S.J.; White, I.; Russel, G.F. A critique of the time domain reflectometry technique for determining field soil-water content. In Advances in Measurement of Soil Physical Properties: Bringing Theory into Practice; SSSA Special Publication: Madison, WI, USA, 1992; Volume 30, pp. 187–208. [Google Scholar]
- Robinson, D.A.; Gardner, C.M.K.; Cooper, J.D. Measurement of relative permittivity in sandy soils using TDR, Capacitance and Theta Probe: Comparison, including the effect of bulk soil electrical conductivity. J. Hydrol. 1999, 223, 198–211. [Google Scholar] [CrossRef]
- Huisman, J.A.; Hubbard, S.S.; Redman, J.D.; Annan, P.A. Measuring soil water content with ground penetrating radar: A review. Vadose Zone J. 2003, 2, 476–491. [Google Scholar] [CrossRef]
- Klotzsche, A.; Jonard, F.; Looms, M.C.; van der Kruk, J.; Huisman, J.A. Measuring Soil Water Content with Ground Penetrating Radar: A Decade of Progress. Vadose Zone J. 2018, 17, 1–9. [Google Scholar] [CrossRef]
- Dean, T.J.; Bell, J.P.; Baty, A.B.J. Soil moisture measurement by an improved capacitance technique: I. Sensor design and performance. J. Hydrol. 1987, 93, 67–78. [Google Scholar] [CrossRef]
- Environmental Sensors, Inc. MP-917 Soil Moisture Instrument Operational Manual; E.S.I.: Sidney, BC, Canada, 1997. [Google Scholar]
- Western, W.A.; Grayson, R.B.; Blöschl, G. Scaling of soil moisture: A hydrologic perspective. Annu. Rev. Earth Planet. Sci. 2002, 30, 149–180. [Google Scholar] [CrossRef]
- Hook, W.R.; Livingston, N.J. Errors in converting time domain reflectometry measurements of propagation velocity to estimates of soil water content. Soil Sci. Soc. Am. J. 1996, 60, 35–41. [Google Scholar] [CrossRef]
- ISO 9261; Agricultural Irrigation Equipment Emitting Pipe Systems-Specifications and Test Methods. International Organization for Standardization (ISO): Geneva, Switzerland, 1991.
- Page, A.L.; Miller, R.H.; Keeney, D.R. Methods of Soil Analysis Part 2: Chemical and Microbiological Properties; Agronomy, ASA and SSSA: Madison, WI, USA, 1982; p. 1159. [Google Scholar]
- Pepin, S.; Livingston, N.J.; Hook, W.R. Temperature-dependent errors in time domain reflectometry determination of soil water. Soil Sci. Soc. Am. J. 1995, 59, 38–43. [Google Scholar] [CrossRef]
- Webster, R. Statistics to support soil research and their presentation. Eur. J. Soil Sci. 2001, 52, 331–340. [Google Scholar] [CrossRef]
- Willmott, C.J.; Wicks, D.E. An empirical method for the spatial interpolation of monthly precipitation within California. Phys. Geogr. 1980, 1, 59–73. [Google Scholar] [CrossRef]
- Willmott, C.J. On the validation of models. Phys. Geogr. 1981, 2, 184–194. [Google Scholar] [CrossRef]
- Willmott, C.J. Some comments on the evaluation of model performance. Bull. Am. Meteorol. Soc. 1982, 63, 1309–1313. [Google Scholar] [CrossRef]
- Willmott, C.J.; Matsuura, K. Advantages of the mean absolute error (MAE) over the root mean square error (RMSE) in assessing average model performance. Clim. Res. 2005, 30, 79–82. [Google Scholar] [CrossRef]
- Filintas, A.; Gougoulias, N.; Kourgialas, N.; Hatzichristou, E. Management Zones Delineation, Correct and Incorrect Application Analysis in a Coriander Field Using Precision Agriculture, Soil Chemical, Granular and Hydraulic Analyses, Fuzzy k-Means Zoning, Factor Analysis and Geostatistics. Water 2023, 15, 3278. [Google Scholar] [CrossRef]
- Norusis, M.J. IBM SPSS Statistics 19 Advanced Statistical Procedures Companion; Pearson: London, UK, 2011. [Google Scholar]
- Davis, J.C. Statistics and Data Analysis in Geology; Wiley: New York, NY, USA, 1986. [Google Scholar]
- Krige, D.G. A statistical approach to some basic mine problems on the Witwatersrand. J. Chem. Metall. Min. Soc. S. Afr. 1951, 52, 119–139. [Google Scholar]
- Krige, D.G. Two-dimensional weighted moving average trend surfaces for ore evaluation. J. S. Afr. Inst. Min. Metall. 1966, 66, 13–38. [Google Scholar]
- Matheron, G. Principles of geostatistics. Econ. Geol. 1963, 58, 1246–1266. [Google Scholar] [CrossRef]
- Matheron, G. Les Variables Régionalisées et leur Estimation; Masson: Paris, France, 1965. [Google Scholar]
- McBratney, A.B.; Webster, R. Choosing functions for semivarigrams of soil properties and fitting them to sampling estimates. J. Soil Sci. 1986, 37, 617–639. [Google Scholar] [CrossRef]
- Olea, R.A. Geostatistics for Engineers and Earth Scientists; Kluwer Academic Publishers: Boston, MA, USA, 1999. [Google Scholar]
- Oliver, M.A. (Ed.) Geostatistical Applications in Precision Agriculture; Springer: Dordrecht, Germany, 2010. [Google Scholar]
- Oliver, M.A.; Webster, R. A tutorial guide to geostatistics: Computing and modeling variograms and kriging. Catena 2014, 113, 56–69. [Google Scholar] [CrossRef]
- Carlson, D.H.; Thurow, T.L.; Knight, R.W.; Heitschmidt, R.K. Effect of honey mesquite on the water balance of Texas Rolling Plains rangeland. J. Range Manag. 1990, 43, 491–496. [Google Scholar] [CrossRef]
- Huxman, T.E.; Wilcox, B.P.; Breshears, D.D.; Scott, R.L.; Snyder, K.A.; Small, E.E.; Hultine, K.; Pockman, W.T.; Jackson, R.B. Ecohydrological implications of woody plant encroachment. Ecology 2005, 86, 308–319. [Google Scholar] [CrossRef]
- Scott, R.L.; Huxman, T.E.; Cable, W.L.; Emmerich, W.E. Partitioning of evapotranspiration and its relation to carbon dioxide exchange in a Chihuahuan Desert shrubland. Hydrol. Process. 2006, 20, 3227–3243. [Google Scholar] [CrossRef]
- Filintas, A. Geostatistics Precision Agriculture Modeling on Moisture Root Zone Profiles in Clay Loam and Clay Soils, Using Time Domain Reflectometry Multisensors and Soil Analysis. Hydrology 2025, 12, 183. [Google Scholar] [CrossRef]
- Nash, J.E.; Sutcliffe, J.V. River flow forecasting through conceptual models Part I—A discussion of principles. J. Hydrol. 1970, 10, 282–290. [Google Scholar] [CrossRef]
- Motovilov, Y.G.; Gottschalk, L.; Engeland, K.; Rodhe, A. Validation of a Distributed Hydrolofical Model Against Spatial Observations. Agric. For. Meteorol. 1999, 98, 257–277. [Google Scholar] [CrossRef]
- Moriasi, D.N.; Arnold, J.G.; Van Liew, M.W.; Bingner, R.L.; Harmel, R.D.; Veith, T.L. Model evaluation guidelines for systematic quantification of accuracy in watershed simulations. Trans. ASABE 2007, 50, 885–900. [Google Scholar] [CrossRef]
- Dioudis, P.; Filintas, A.; Papadopoulos, A.; Sakellariou-Makrantonaki, M. The influence of different drip irrigation layout designs on sugar beet yield and their contribution to environmental sustainability. Fresen. Environ. Bull. 2010, 19, 818–831. [Google Scholar]
- Doorenbos, J.; Kassam, A.H. Yield Response to Water, FAO Irrigation and Drainage Paper 33; Food and Agriculture Organisation of the United Nations (FAO): Rome, Italy, 1986. [Google Scholar]
- Allen, R.; Pereira, L.; Raes, D.; Smith, M. Crop Evapotranspiration; Drainage & Irrigation Paper Nº56; FAO: Rome, Italy, 1998. [Google Scholar]
- Cass, A. Interpretation of some soil physical indicators for assessing soil physical fertility. In Soil Analysis: An Interpretation Manual, 2nd ed.; Peverill, K.I., Sparrow, L.A., Reuter, D.J., Eds.; CSIRO Publishing: Melbourne, Australia, 1999; pp. 95–102. [Google Scholar]
- Blanco-Canqui, H.; Gantzer, C.J.; Anderson, S.H.; Alberts, E.E.; Ghidey, F. Saturated Hydraulic Conductivity and Its Impact on Simulated Runoff for Claypan Soils. Soil Sci. Soc. Am. J. 2002, 66, 1596–1602. [Google Scholar] [CrossRef]
- Geeves, G.W.; Craze, B.; Hamilton, G.J. Soil physical properties. In Soils—Their Properties and Management, 3rd ed.; Charman, P.E.V., Murphy, B.W., Eds.; Oxford University Press: Melbourne, Australia, 2007; pp. 168–191. [Google Scholar]
- Wischmeier, W.H.; Smith, D.D. Predicting Rainfall Erosion Losses: A Guide to Conservation Planning; Agriculture Handbook 537; USDA-ARS-58; Department of Agriculture, Science and Education Administration: Washington, DC, USA, 1978. [Google Scholar]
- USDA. Department of Agriculture—Agricultural Research Service: Revised Universal Soil Loss Equation, Version 2 (RUSLE2). 2013. Available online: https://www.ars.usda.gov/ARSUserFiles/60600505/RUSLE/RUSLE2_Science_Doc.pdf (accessed on 22 April 2025).
- Rosewell, C.J.; Loch, R.J. Estimation of the RUSLE soil erodibility factor. In Soil Physical Measurement and Interpretation for Land Evaluation: A Laboratory Handbook; McKenzie, N.J., Cresswell, H., Coughlan, K., Eds.; CSIRO Publishing: Melbourne, Australia, 2002; pp. 360–369. [Google Scholar]
- Wilding, L.P. Spatial variability: Its documentation, accommodation and implication to soil survey. In Soil Spatial Variability; Nielsen, D.R., Bouma, J., Eds.; Pudoc: Wagenigen, The Netherlands, 1985; pp. 166–189. [Google Scholar]
- Webster, R.; Oliver, M.A. Geostatistics for Environmental Scientists, 2nd ed.; John Wiley & Sons: Chichester, UK, 2007; p. 271. Available online: https://onlinelibrary.wiley.com/doi/book/10.1002/9780470517277 (accessed on 22 April 2024).
- Soropa, G.; Mbisva, O.M.; Nyamangara, J.; Nyakatawa, E.Z.; Nyapwere, N.; Lark, R.M. Spatial variability and mapping of soil fertility status in a high-potential smallholder farming area under sub-humid conditions in Zimbabwe. SN Appl. Sci. 2021, 3, 396. [Google Scholar] [CrossRef]
- Loague, K.; Green, R.E. Statistical and graphical methods for evaluating solute transport models: Overview and application. J. Contam. Hydrol. 1991, 7, 51–73. [Google Scholar] [CrossRef]
- Bogunovic, I.; Mesic, M.; Zgorelec, Z.; Jurisic, A.; Bilandzija, D. Spatial variation of soil nutrients on sandy-loam soil. Soil Tillage Res. 2014, 144, 174–183. [Google Scholar] [CrossRef]
- Isaaks, E.H.; Srivastava, R.M. An Introduction to Applied Geostatistics; Oxford University Press: New York, NY, USA, 1989. [Google Scholar]
- Hatzopoulos, N.J. Topographic Mapping, Covering the Wider Field of Geospatial Information Science & Technology (GIS&T); Universal Publishers: Irvine, CA, USA, 2008. [Google Scholar]
- Lu, G.Y.; Wong, D.W. An adaptive inverse-distance weighting spatial interpolation technique. Comput. Geosci. 2008, 34, 1044–1055. [Google Scholar] [CrossRef]
- Qu, M.K.; Li, W.D.; Zhang, C.R.; Wang, S.Q. Effect of land use types on the spatial prediction of soil nitrogen. GISci. Remote Sens. 2012, 49, 397–411. [Google Scholar] [CrossRef]
- Ferreiro, J.P.; Pereira De Almeida, V.; Cristina Alves, M.; Aparecida De Abreu, C.; Vieira, S.R.; Vidal Vázquez, E. Spatial variability of soil organic matter and cation exchange capacity in an Oxisol under different land uses. Commun. Soil. Sci. Plant Anal. 2016, 47 (Suppl. S1), 75–89. [Google Scholar] [CrossRef]
- Yang, P.G.; Byrne, J.M.; Yang, M. Spatial variability of soil magnetic susceptibility, organic carbon and total nitrogen from farmland in northern China. Catena 2016, 145, 92–98. [Google Scholar] [CrossRef]
- Goovaerts, P. Geostatistical tools for characterizing the spatial variability of microbiological and physico-chemical soil properties. Biol. Fertil. Soils 1998, 27, 315–334. [Google Scholar] [CrossRef]
- Heathman, G.C.; Starks, P.J.; Brown, M.A. Time domain reflectometry field calibration in the Little Washita River experimental watershed. Soil Sci. Soc. Am. J. 2003, 67, 52–61. [Google Scholar] [CrossRef]
- Zhang, S.-W.; Shen, C.-Y.; Chen, X.-Y.; Ye, H.-C.; Huang, Y.-F.; Lai, S. Spatial Interpolation of Soil Texture Using Compositional Kriging and Regression Kriging with Consideration of the Characteristics of Compositional Data and Environment Variables. J. Integr. Agric. 2013, 12, 1673–1683. [Google Scholar] [CrossRef]
- Lin, H. Earth’s critical zone and hydropedology: Concepts, characteristics, and advances. Hydrol. Earth Syst. Sci. 2010, 14, 25–45. [Google Scholar] [CrossRef]
- Venkatesh, B.; Lakshman, N.; Purandara, B.K.; Reddy, V.B. Analysis of observed soil moisture patterns under different land covers in Western Ghats, India. J. Hydrol. 2011, 397, 281–294. [Google Scholar] [CrossRef]
- Zhao, P.; Shao, M.-A.; Horton, R. Performance of soil particle-size distribution models for describing deposited soils adjacent to constructed dams in the China Loess Plateau. Acta Geophys. 2011, 59, 124–138. [Google Scholar] [CrossRef]
- Montenegro, S.; Ragab, R. Impact of possible climate and land use changes in the semi arid regions: A case study from North Eastern Brazil. J. Hydrol. 2012, 434–435, 55–68. [Google Scholar] [CrossRef]
- Yao, X.; Fu, B.; Lü, Y.; Chang, R.; Wang, S.; Wang, Y.; Su, C. The multi-scale spatial variance of soil moisture in the semi-arid Loess Plateau of China. J. Soils Sediments 2012, 12, 694–703. [Google Scholar] [CrossRef]
- Zhang, X.; Zhao, W.; Wang, L.; Liu, Y.; Liu, Y.; Feng, Q. Relationship between soil water content and soil particle size on typical slopes of the Loess Plateau during a drought year. Sci. Total Environ. 2019, 648, 943–954. [Google Scholar] [CrossRef] [PubMed]
- Addis, H.K.; Klik, A. Predicting the spatial distribution of soil erodibility factor using USLE nomograph in an agricultural watershed, Ethiopia. Int. Soil Water Conserv. Res. 2015, 3, 282–290. [Google Scholar] [CrossRef]
- Rodríguez-Pérez, Á.M.; García-Chica, A.; Caparros-Mancera, J.J.; Rodríguez, C.A. Turbine-Based Generation in Greenhouse Irrigation Systems. Hydrology 2024, 11, 149. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SN | Parameter | Range | Minimum | Maximum | Mean | StD * | Variance | CV (%) | CV Category |
|---|---|---|---|---|---|---|---|---|---|
| Clay Loam (CL) Soils of Sites A and B | |||||||||
| 1 | Clay (<0.002 mm) (%) | 10.32 | 29.66 | 39.98 | 34.00 | 2.67 | 7.15 | 7.87 | Low |
| 2 | Gravel (% wt) | 0.24 | 0.01 | 0.25 | 0.09 | 0.05 | 0.00 | 54.36 | High |
| 3 | Sand pr (0.2–2 mm) (%) | 3.91 | 10.32 | 14.22 | 12.00 | 0.97 | 0.94 | 8.07 | Low |
| 4 | Silt (0.002–0.02 mm) (%) | 8.71 | 36.46 | 45.17 | 39.94 | 2.06 | 4.26 | 5.17 | Low |
| 5 | Soil erodibility [Kfactor] (Mg·ha·h·ha−1·MJ−1·mm−1) | 0.01 | 0.03 | 0.04 | 0.04 | 0.00 | 0.00 | 8.99 | Low |
| 6 | Vfs sand (0.02–0.2 mm) (%) | 3.80 | 12.08 | 15.89 | 14.07 | 0.84 | 0.71 | 5.98 | Low |
| 7 | Bulk density (g·cm−3) | 0.22 | 1.24 | 1.46 | 1.34 | 0.05 | 0.00 | 3.48 | Low |
| 8 | Field capacity θfc (% vol.) | 3.61 | 37.25 | 40.86 | 38.87 | 0.84 | 0.71 | 2.17 | Low |
| 9 | Plant available water (m3·m−3) | 0.03 | 0.12 | 0.15 | 0.14 | 0.01 | 0.00 | 4.48 | Low |
| 10 | Saturation θsat (% vol.) | 6.69 | 47.37 | 54.06 | 51.75 | 1.63 | 2.64 | 3.14 | Low |
| 11 | Sat. hydraulic conductivity Ks (10−3·cm·s−1) | 17.30 | 4.37 | 21.67 | 14.15 | 3.85 | 14.81 | 27.19 | Moderate |
| 12 | Wilting point θwp (% vol.) | 5.01 | 22.34 | 27.36 | 24.38 | 1.18 | 1.39 | 4.83 | Low |
| Parameter | Clay (C) soils of sites A and B | ||||||||
| 13 | Clay (<0.002 mm) (%) | 7.32 | 41.63 | 48.94 | 44.36 | 2.75 | 7.56 | 6.20 | Low |
| 14 | Gravel (% wt) | 0.07 | 0.01 | 0.08 | 0.05 | 0.03 | 0.00 | 58.86 | High |
| 15 | Sand pr (0.2–2 mm) (%) | 1.64 | 7.65 | 9.30 | 8.45 | 0.69 | 0.48 | 8.20 | Low |
| 16 | Silt (0.002–0.02 mm) (%) | 5.54 | 32.67 | 38.21 | 35.18 | 1.76 | 3.08 | 4.99 | Low |
| 17 | Soil erodibility [Kfactor] (Mg·ha·h·ha−1·MJ−1·mm−1) | 0.01 | 0.04 | 0.04 | 0.04 | 0.00 | 0.00 | 5.75 | Low |
| 18 | Vfs sand (0.02–0.2 mm) (%) | 2.57 | 10.74 | 13.31 | 12.01 | 1.20 | 1.45 | 10.02 | Low |
| 19 | Bulk density (g·cm−3) | 0.04 | 1.68 | 1.72 | 1.70 | 0.01 | 0.00 | 0.73 | Low |
| 20 | Field capacity θfc (% vol.) | 1.53 | 33.45 | 34.98 | 33.93 | 0.55 | 0.30 | 1.61 | Low |
| 21 | Plant available water (m3·m−3) | 0.01 | 0.11 | 0.12 | 0.12 | 0.00 | 0.00 | 3.68 | Low |
| 22 | Saturation θsat (% vol.) | 3.06 | 35.64 | 38.71 | 37.24 | 0.92 | 0.84 | 2.47 | Low |
| 23 | Sat. hydraulic conductivity Ks (10−3·cm·s−1) | 0.83 | 0.08 | 0.91 | 0.33 | 0.26 | 0.07 | 78.83 | High |
| 24 | Wilting point θwp (% vol.) | 2.72 | 20.74 | 23.46 | 21.97 | 0.90 | 0.80 | 4.07 | Low |
| Correlations of Granular Group Parameters Maps | Clay (<0.002 mm) (%) | Gravel (% wt) | Sand pr (0.2–2 mm) (%) | Silt (0.002–0.02 mm) (%) | Kfactor (Mg·ha·h·ha−1·MJ−1·mm−1) | Vfs Sand (0.02–0.2 mm) (%) |
|---|---|---|---|---|---|---|
| Clay (<0.002 mm) (%) | 1 | |||||
| Gravel (% wt) | −0.100 | 1 | ||||
| Sand pr (0.2–2 mm) (%) | −0.707 ** | 0.440 ** | 1 | |||
| Silt (0.002–0.02 mm) (%) | −0.909 ** | 0.114 | 0.580 ** | 1 | ||
| Soil erodibility [Kfactor] (Mg·ha·h·ha−1·MJ−1·mm−1) | −0.169 | −0.479 ** | −0.237 | 0.038 | 1 | |
| Vfs sand (0.02–0.2 mm) (%) | −0.675 ** | −0.425 ** | 0.543 ** | 0.492 ** | 0.228 | 1 |
| Correlations of Hydraulic Group Parameters Maps | Bulk Density (g·cm−3) | Field Capacity θfc (% vol.) | Plant Available Water (m3·m−3) | Saturation θsat (% vol.) | Ks (10−3·cm·s−1) | Wilting Point θwp (% vol.) |
|---|---|---|---|---|---|---|
| Bulk density (g·cm−3) | 1 | |||||
| Field capacity θfc (% vol.) | −0.680 ** | 1 | ||||
| Plant available water (m3·m−3) | −0.770 ** | 0.243 | 1 | |||
| Saturation θsat (% vol.) | −0.718 ** | 0.787 ** | 0.484 ** | 1 | ||
| Sat. Hydraulic conductivity Ks (10−3·cm·s−1) | −0.681 ** | 0.360 ** | 0.790 ** | 0.775 ** | 1 | |
| Wilting point θwp (% vol.) | −0.485 ** | 0.916 ** | 0.020 | 0.547 ** | 0.082 | 1 |
| SN | Treatment (Tr.) | N | Range | Minimum | Maximum | Mean | StD | Variance | CV (%) | CV (Category) |
|---|---|---|---|---|---|---|---|---|---|---|
| Soil-Cores water content θvg (m3·m−3) results using gravimetric method [5,65] | ||||||||||
| 1 | Tr. A-All soils | 150 | 0.2730 | 0.1288 | 0.4018 | 0.2586 | 0.0602 | 0.0036 | 23.2680 | Moderate |
| 2 | Tr. A-Clay Loam soils | 125 | 0.2730 | 0.1288 | 0.4018 | 0.2551 | 0.0639 | 0.0041 | 25.0335 | Moderate |
| 3 | Tr. A-Clay soils | 25 | 0.1258 | 0.2226 | 0.3485 | 0.2762 | 0.0320 | 0.0010 | 11.5794 | Low |
| 4 | Tr. B-All soils | 150 | 0.2556 | 0.1323 | 0.3879 | 0.2703 | 0.0569 | 0.0032 | 21.0348 | Moderate |
| 5 | Tr. B-Clay Loam soils | 125 | 0.2556 | 0.1323 | 0.3879 | 0.2656 | 0.0604 | 0.0037 | 22.7529 | Moderate |
| 6 | Tr. B-Clay soils | 25 | 0.0925 | 0.2406 | 0.3331 | 0.2934 | 0.0228 | 0.0005 | 7.7762 | Low |
| 7 | Combined Tr.A & B -All soils | 300 | 0.2730 | 0.1288 | 0.4018 | 0.2645 | 0.0587 | 0.0034 | 22.2082 | Moderate |
| 8 | Combined Tr.A & B -Clay Loam soils | 250 | 0.2730 | 0.1288 | 0.4018 | 0.2604 | 0.0623 | 0.0039 | 23.9171 | Moderate |
| 9 | Combined Tr.A & B -Clay soils | 50 | 0.1258 | 0.2226 | 0.3485 | 0.2848 | 0.0288 | 0.0008 | 10.1236 | Low |
| TDR sensors field measurements results, of soil water content (m3·m−3) based on method 1 of sensor calibration according to Factory (Environmental Sensors Inc., 1997) [61] | ||||||||||
| 10 | Tr. A-All soils | 150 | 0.2800 | 0.1700 | 0.4500 | 0.3113 | 0.0701 | 0.0049 | 22.5166 | Moderate |
| 11 | Tr. A-Clay Loam soils | 125 | 0.2800 | 0.1700 | 0.4500 | 0.3062 | 0.0743 | 0.0055 | 24.2723 | Moderate |
| 12 | Tr. A-Clay soils | 25 | 0.1051 | 0.2700 | 0.3751 | 0.3369 | 0.0339 | 0.0011 | 10.0640 | Low |
| 13 | Tr. B-All soils | 150 | 0.2990 | 0.1660 | 0.4650 | 0.3305 | 0.0670 | 0.0045 | 20.2754 | Moderate |
| 14 | Tr. B-Clay Loam soils | 125 | 0.2990 | 0.1660 | 0.4650 | 0.3248 | 0.0710 | 0.0050 | 21.8533 | Moderate |
| 15 | Tr. B-Clay soils | 25 | 0.0954 | 0.2930 | 0.3884 | 0.3590 | 0.0289 | 0.0008 | 8.0409 | Low |
| 16 | Combined Tr.A & B -All soils | 300 | 0.2990 | 0.1660 | 0.4650 | 0.3209 | 0.0691 | 0.0048 | 21.5414 | Moderate |
| 17 | Combined Tr.A & B -Clay Loam soils | 250 | 0.2990 | 0.1660 | 0.4650 | 0.3155 | 0.0731 | 0.0053 | 23.1760 | Moderate |
| 18 | Combined Tr.A & B -Clay soils | 50 | 0.1184 | 0.2700 | 0.3884 | 0.3480 | 0.0331 | 0.0011 | 9.5143 | Low |
| TDR sensors field measurements results, of soil water content (m3·m−3) based on method 2 of sensor calibration according to Hook and Livingston (1996) [63] | ||||||||||
| 19 | Tr. A-All soils | 150 | 0.2661 | 0.1615 | 0.4276 | 0.2958 | 0.0666 | 0.0044 | 22.5166 | Moderate |
| 20 | Tr. A-Clay Loam soils | 125 | 0.2661 | 0.1615 | 0.4276 | 0.2910 | 0.0706 | 0.0050 | 24.2723 | Moderate |
| 21 | Tr. A-Clay soils | 25 | 0.0998 | 0.2566 | 0.3564 | 0.3201 | 0.0322 | 0.0010 | 10.0640 | Low |
| 22 | Tr. B-All soils | 150 | 0.2841 | 0.1577 | 0.4419 | 0.3141 | 0.0637 | 0.0041 | 20.2754 | Moderate |
| 23 | Tr. B-Clay Loam soils | 125 | 0.2841 | 0.1577 | 0.4419 | 0.3087 | 0.0675 | 0.0046 | 21.8533 | Moderate |
| 24 | Tr. B-Clay soils | 25 | 0.0906 | 0.2784 | 0.3690 | 0.3411 | 0.0274 | 0.0008 | 8.0409 | Low |
| 25 | Combined Tr.A & B -All soils | 300 | 0.2841 | 0.1577 | 0.4419 | 0.3050 | 0.0657 | 0.0043 | 21.5414 | Moderate |
| 26 | Combined Tr.A & B -Clay Loam soils | 250 | 0.2841 | 0.1577 | 0.4419 | 0.2998 | 0.0695 | 0.0048 | 23.1760 | Moderate |
| 27 | Combined Tr.A & B -Clay soils | 50 | 0.1125 | 0.2566 | 0.3690 | 0.3306 | 0.0315 | 0.0010 | 9.5143 | Low |
| Treatment (Tr.) | Validation Statistical Measures of TDR Sensor Measurements Results of Soil Water Content () Using Different Calibration Methods (M1 1 & M2 2) of TDR Sensors | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| N | MAE | Pbias | RMSE | U95 | RMSRE | rRMSE | t-Statistic | ||||||||
| M1 | M2 | M1 | M2 | M1 | M2 | M1 | M2 | M1 | M2 | M1 | M2 | M1 | M2 | ||
| Tr. A All soils | 150 | 0.0577 | 0.0426 | 0.2376 | 0.1761 | 0.0610 | 0.0461 | 0.1315 | 0.0970 | 0.2478 | 0.1883 | 24.91 | 18.80 | 15.60 | 13.15 |
| Tr. A Clay Loam soils | 125 | 0.0563 | 0.0415 3 | 0.2364 | 0.1750 | 0.0599 | 0.0452 | 0.1274 | 0.0943 | 0.2477 | 0.1884 | 24.91 | 18.81 | 13.37 | 11.28 |
| Tr. A Clay soils | 25 | 0.0649 | 0.0484 | 0.2435 | 0.1816 | 0.0664 | 0.0501 | 0.3070 | 0.1987 | 0.2484 | 0.1875 | 24.80 | 18.70 | 9.36 | 7.49 |
| Tr. B All soils | 150 | 0.0648 | 0.0487 | 0.2530 | 0.1906 | 0.0670 | 0.0509 | 0.1482 | 0.1093 | 0.2577 | 0.1962 | 26.00 | 19.75 | 20.58 | 17.99 |
| Tr. B Clay Loam soils | 125 | 0.0636 | 0.0478 | 0.2531 | 0.1907 | 0.0660 | 0.0502 | 0.1449 | 0.1072 | 0.2585 | 0.1971 | 26.06 | 19.82 | 17.53 | 15.28 |
| Tr. B Clay soils | 25 | 0.0707 | 0.0533 | 0.2528 | 0.1905 | 0.0715 | 0.0540 | 0.3640 | 0.2340 | 0.2540 | 0.1918 | 25.64 | 19.39 | 13.89 | 12.14 |
| Tr.A & B All soils | 300 | 0.0612 | 0.0457 | 0.2453 | 0.1834 | 0.0641 | 0.0485 | 0.1328 | 0.0992 | 0.2528 | 0.1923 | 25.50 | 19.31 | 24.98 | 21.42 |
| Tr.A & B Clay Loam soils | 250 | 0.0599 | 0.0447 | 0.2447 | 0.1828 | 0.0631 | 0.0478 | 0.1299 | 0.0973 | 0.2531 | 0.1928 | 25.53 | 19.35 | 21.41 | 18.36 |
| Tr.A & B Clay soils | 50 | 0.0678 | 0.0508 | 0.2482 | 0.1860 | 0.0690 | 0.0521 | 0.2354 | 0.1593 | 0.2512 | 0.1897 | 25.25 | 19.07 | 16.27 | 13.48 |
| SNP | Group’s Parameters List | Best-Fitted Geostatistical Models | Percentage of Group’s Best-Fitted Model (%) | Model’s N:S Ratio | Spatial Dependence | RRMSE | RRMSE Class |
|---|---|---|---|---|---|---|---|
| Granular group | |||||||
| 1 | Clay (size: <0.002 mm) (%) | Circular | 16.667 | 0.02 | Strong | 6.46 | Good |
| 2 | Kfactor (Mg·ha·h·ha−1·MJ−1·mm−1) | Exponential | 33.333 | 0.14 | Strong | 6.84 | Good |
| 3 | Vf sand (size: 0.02–0.2 mm) (%) | 0.24 | Strong | 7.74 | Good | ||
| 4 | Sand pr (size: 0.2–2 mm) (%) | Pentaspherical | 33.333 | 0.11 | Strong | 8.54 | Good |
| 5 | Silt (size: 0.002–0.02 mm) (%) | 0.11 | Strong | 3.91 | Good | ||
| 6 | Gravel (% wt) | Spherical | 16.667 | 0.99 | Weak | 71.24 | Poor |
| Hydraulic group | |||||||
| 7 | Plant available water (m3·m−3) | Circular | 16.665 | 0.98 | Weak | 7.21 | Good |
| 8 | Bulk density (g·cm−3) | Exponential | 66.670 | 0.35 | Medium | 9.66 | Good |
| 9 | Field capacity θfc (% vol.) | 0.07 | Strong | 3.89 | Good | ||
| 10 | Saturation θsat (% vol.) | 0.99 | Weak | 3.58 | Good | ||
| 11 | Sat.Hydr. Cond. Ks (10−3·cm·s−1) | 0.44 | Medium | 50.04 | Poor | ||
| 12 | Wilting point θwp (% vol.) | Spherical | 16.665 | 0.04 | Strong | 3.88 | Good |
| Soil’s apparent dielectric Kα | |||||||
| 13 | Kα (w.m.u.) of 1st week | Gaussian | 100.000 | 0.14 | Strong | 15.24 | Moderate |
| 14 | Kα (w.m.u.) of 2nd week | 0.17 | Strong | 16.65 | Moderate | ||
| 15 | Kα (w.m.u.) of 3rd week | 0.06 | Strong | 20.68 | Moderate | ||
| 16 | Kα (w.m.u.) of 4th week | 0.12 | Strong | 14.32 | Good | ||
| 17 | Kα (w.m.u.) of 5th week | 0.16 | Strong | 15.76 | Moderate | ||
| SWC Group using Sensor calibration method 1 1 [61] | |||||||
| 18 | (m3·m−3) of 1st week | Spherical | 20.000 | 0.03 | Strong | 14.01 | Good |
| 19 | (m3·m−3) of 2nd week | Exponential | 80.000 | 0.01 | Strong | 14.56 | Good |
| 20 | (m3·m−3) of 3rd week | Exponential | 0.02 | Strong | 13.83 | Good | |
| 21 | (m3·m−3) of 4th week | Exponential | 0.02 | Strong | 13.43 | Good | |
| 22 | (m3·m−3) of 5th week | Exponential | 0.02 | Strong | 14.34 | Good | |
| SWC Group using Sensor calibration method 2 2 [63] | |||||||
| 23 | (m3·m−3) of 1st week | Spherical | 20.000 | 0.02 | Strong | 13.77 | Good |
| 24 | (m3·m−3) of 2nd week | Exponential | 20.000 | 0.02 | Strong | 14.66 | Good |
| 25 | (m3·m−3) of 3rd week | Spherical | 20.000 | 0.03 | Strong | 12.83 | Good |
| 26 | (m3·m−3) of 4th week | Exponential | 20.000 | 0.03 | Strong | 13.54 | Good |
| 27 | (m3·m−3) of 5th week | Spherical | 20.000 | 0.15 | Strong | 13.80 | Good |
| SN | Parameter (Units) | Best-Fitted Geostatistical Model | Validation Geostatistical Measures | ||||||
|---|---|---|---|---|---|---|---|---|---|
| En-s (NSE) | MPE | RMSE | MSPE | RMSSE | ASE | MSDR | |||
| 1 | Clay (<0.002 mm) (%) | Circular | 0.8418 | −0.26065 | 1.8613 | −0.0568 | 1.4680 | 2.8899 | 0.5194 |
| 2 | Kfactor (Mg·ha·h·ha−1·MJ−1·mm−1) | Exponential | 0.5580 | −0.00002 | 0.0024 | −0.0051 | 1.4251 | 0.0025 | 0.7352 |
| 3 | Vf sand (0.02–0.2 mm) (%) | Exponential | 0.5157 | 0.04575 | 0.8203 | 0.0335 | 4.4719 | 0.9356 | 1.0235 |
| 4 | Sand pr (0.2–2 mm) (%) | Pentaspherical | 0.6010 | 0.09175 | 1.0249 | 0.0464 | 2.8196 | 1.2033 | 1.3856 |
| 5 | Silt (0.002–0.02 mm) (%) | Pentaspherical | 0.9095 3 | −0.01955 | 0.8009 | −0.0018 | 1.6513 | 1.3217 | 0.8578 |
| 6 | Gravel (% wt) | Spherical | −0.2433 | 0.00684 | 0.0520 | 0.0320 | 6.6458 | 0.0866 | 4.2821 |
| 7 | PAW (m3·m−3) | Circular | 0.4247 | 0.00029 | 0.0078 | 0.0354 | 1.8364 | 0.0092 | 1.7170 |
| 8 | Bulk density (g·cm−3) | Exponential | 0.1924 | −0.00610 | 0.1252 | −0.0312 | 4.6771 | 0.1200 | 5.4839 |
| 9 | Field capacity θfc (% vol.) | Exponential | 0.4936 | 0.12182 | 1.4464 | 0.0415 | 2.5016 | 1.6178 | 1.5813 |
| 10 | Saturation θsat (% vol.) | Exponential | 0.8845 | −0.10719 | 1.9076 | −0.0539 | 1.8234 | 1.9697 | 0.8472 |
| 11 | Ks (10−3·cm·s−1) | Exponential | 0.0955 | 0.18019 | 5.9151 | 0.0204 | 8.1641 | 5.7881 | 0.8296 |
| 12 | Wilting point θwp (% vol.) | Spherical | 0.8001 | 0.05867 | 0.6422 | 0.0410 | 2.2446 | 1.0224 | 0.7379 |
| 13 | Kα (w.m.u.) of 1st week | Gaussian | 0.6595 | −0.14041 | 2.5287 | −0.0285 | 1.9781 | 2.7217 | 0.7266 |
| 14 | Kα (w.m.u.) of 2nd week | Gaussian | 0.6224 | −0.22495 | 2.8017 | −0.0506 | 2.0151 | 3.0314 | 0.8060 |
| 15 | Kα (w.m.u.) of 3rd week | Gaussian | 0.4953 | −0.10091 | 3.2106 | −0.1231 | 3.3503 | 2.5906 | 1.1399 |
| 16 | Kα (w.m.u.) of 4th week | Gaussian | 0.6848 | −0.12164 | 2.5641 | −0.0252 | 1.8037 | 2.6964 | 0.7120 |
| 17 | Kα (w.m.u.) of 5th week | Gaussian | 0.6568 | −0.26544 | 2.6868 | −0.0695 | 6.2618 | 2.7800 | 0.7725 |
| 18 | M1 1 (m3·m−3) of 1st week | Spherical | 0.5855 | −0.00089 | 0.0438 | 0.0017 | 12.5532 | 0.0581 | 0.7488 |
| 19 | M2 2 (m3·m−3) of 1st week | Spherical | 0.5989 | −0.00303 | 0.0409 | −0.0472 | 2.9942 | 0.0434 | 0.9412 |
| 20 | M1 (m3·m−3) of 2nd week | Exponential | 0.5731 | −0.00258 | 0.0460 | −0.0286 | 4.3778 | 0.0560 | 0.8244 |
| 21 | M2 (m3·m−3) of 2nd week | Exponential | 0.5683 | −0.00248 | 0.0440 | −0.0288 | 2.5424 | 0.0532 | 0.8415 |
| 22 | M1 (m3·m−3) of 3rd week | Exponential | 0.5624 | −0.00390 | 0.0448 | −0.0542 | 2.5592 | 0.0565 | 1.0337 |
| 23 | M2 (m3·m−3) of 3rd week | Spherical | 0.6229 | −0.00434 | 0.0395 | −0.0748 | 5.1296 | 0.0441 | 1.0986 |
| 24 | M1 (m3·m−3) of 4th week | Exponential | 0.5624 | −0.00328 | 0.0447 | −0.0449 | 2.2958 | 0.0562 | 1.0382 |
| 25 | M2 (m3·m−3) of 4th week | Exponential | 0.5562 | −0.00371 | 0.0428 | −0.0553 | 9.3349 | 0.0536 | 1.0352 |
| 26 | M1 (m3·m−3) of 5th week | Exponential | 0.5850 | −0.00363 | 0.0458 | −0.0476 | 3.3552 | 0.0539 | 0.7873 |
| 27 | M2 (m3·m−3) of 5th week | Spherical | 0.6156 | −0.00363 | 0.0419 | −0.0599 | 3.9487 | 0.0433 | 0.9937 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Filintas, A. Driplines Layout Designs Comparison of Moisture Distribution in Clayey Soils, Using Soil Analysis, Calibrated Time Domain Reflectometry Sensors, and Precision Agriculture Geostatistical Imaging for Environmental Irrigation Engineering. AgriEngineering 2025, 7, 229. https://doi.org/10.3390/agriengineering7070229
Filintas A. Driplines Layout Designs Comparison of Moisture Distribution in Clayey Soils, Using Soil Analysis, Calibrated Time Domain Reflectometry Sensors, and Precision Agriculture Geostatistical Imaging for Environmental Irrigation Engineering. AgriEngineering. 2025; 7(7):229. https://doi.org/10.3390/agriengineering7070229
Chicago/Turabian StyleFilintas, Agathos. 2025. "Driplines Layout Designs Comparison of Moisture Distribution in Clayey Soils, Using Soil Analysis, Calibrated Time Domain Reflectometry Sensors, and Precision Agriculture Geostatistical Imaging for Environmental Irrigation Engineering" AgriEngineering 7, no. 7: 229. https://doi.org/10.3390/agriengineering7070229
APA StyleFilintas, A. (2025). Driplines Layout Designs Comparison of Moisture Distribution in Clayey Soils, Using Soil Analysis, Calibrated Time Domain Reflectometry Sensors, and Precision Agriculture Geostatistical Imaging for Environmental Irrigation Engineering. AgriEngineering, 7(7), 229. https://doi.org/10.3390/agriengineering7070229