1. Introduction
Tillage—as a key agricultural process that strongly influences physical, chemical, and biological soil properties—has a major impact on the agricultural ecosystem and crop productivity, which in turn determines the yield of the crops grown in the soil [
1]. Plowing is one of the main technological operations in agricultural production and has a direct impact on the quality of crop growth [
2,
3]. According to Schneider et al. [
4], deep plowing is required in many crop production fields to provide deep-rooted plants with additional nutrients stored in the subsoil. Equally important aspects of tillage targeting are managing crop residues and increasing uniform moisture distribution, increasing nutrient supply to the crop, and reducing pests and weeds [
4,
5]. Despite its potential benefits, conventional tillage has serious drawbacks in terms of soil moisture loss, soil structure disruption, loss of soil organic matter, and facilitation of soil erosion [
5,
6]. Soil erosion is a global environmental problem, causing soil degradation and affecting thousands of millions of hectares of land worldwide [
7,
8]. Soil erosion is considered to be one of the most serious environmental problems in agriculture globally [
7,
9].
Traditional agricultural practices use a uniform tillage depth method, which applies the tillage effect evenly over the entire cultivated field area. The choice of tillage depth is usually based on the soil structure. Deep tillage is a rather difficult technological process that depends on the crop, previous crop and crop residues, soil characteristics, climatic conditions, available equipment, etc. to be performed properly. However, conventional tillage at a uniform depth is still more attractive than variable depth tillage because it requires less knowledge of site-specific tillage and special spectral equipment to find problem areas in the soil [
10]. However, traditional deep tillage is the most energy-intensive and costly field operation; specifically, the depth of tillage has an impact on the tractive effort of agricultural machinery, which is directly related to the tractor’s fuel consumption [
11]. Applying the same tillage depth for many years creates favorable conditions for the formation of a compacted layer: the plough pan. On the other hand, the use of heavy agricultural machinery for deep tillage can over-compact the soil, reducing soil porosity and water retention and increasing bulk density, which limits the penetration of plant roots into deeper soil layers [
12]. Soil compaction is related to several physical and mechanical properties and is defined as the change in soil volume resulting from short-term loading caused by rolling, compression, and vibration [
13,
14]. The compaction conditions of extremely wet soils change compared to soils of normal moisture. Compaction is defined as the compaction of soil by the removal of air, so highly water-saturated soils cannot be compacted normally. However, machine tires and implements can smear the soil and disrupt the integrity of the soil pores in such very wet and soft soil conditions. This results in reduced hydraulic conductivity, which can have a greater negative effect on plant root penetration than compaction [
15]. Han et al. [
16] mentioned that plowing too deeply can not only change the physical properties of the soil but also negatively affect the engine performance of agricultural machinery. Variations in soil resistance during deep tillage can also cause variations in engine load and affect the uniformity of tillage depth and tractor efficiency. When deep tilling the soil in complex or strongly changing conditions in different field locations, the physical properties of the soil can change very quickly and the machine operator must be able to react in time to change the technological parameters of the tillage so that the load does not exceed the permissible engine load, which could lead to engine overload and the engine stopping during work [
16]; this could shorten the life of an expensive machine.
Variable depth tillage is usually associated with deep tillage, but with the recent increase in reduced tillage, strip tillage, and no-tillage techniques, a compacted soil layer can also form in shallower soil layers or even on the soil surface. Reichert et al. [
17] pointed out that the long-term use of no-tillage also creates the conditions for the formation of a compacted soil layer, also known as a no-till pan. The depth of this layer depends on the working depth of the coulters and is typically 7–20 cm deep. A no-till pan, like a tillage pan, can limit plant root growth and water infiltration due to the high bulk density, low porosity and high mechanical resistance of the soil [
17].
Rationalization of tillage practices to replace conventional tillage with variable depth tillage may be a suitable alternative to achieve economic crop production and reduce damage to agroecosystems [
5]. However, variable depth tillage (VDT) has so far been rarely used, and there is a general lack of experimental research results on tillage depth [
18]. Although VDT has been known theoretically for many years, it can be considered a relatively new practice in terms of its practical applicability in the farmer’s field. Therefore, there is still a lack of published information on the traction and energy requirements of VDT, which is undoubtedly an important consideration when choosing a tillage method. In addition, there is a lack of work to determine the influence of tractor speed and soil parameters such as texture, moisture, and electrical conductivity on energy requirements in relation to site-specific tillage depth. This can be attributed to the fact that long, expensive, time-consuming experimental studies requiring additional equipment and knowledge lead farmers to prefer conventional technologies rather than VDT [
19]. Where VDT has been used in the field, however, the depth settings have mostly been done manually. The aim of this study was to carry out a detailed review of scientific work on variable depth tillage, highlighting the importance of soil compaction and VDT; the measurement methods and equipment used, and the impact on soil, crops, the environment, and the economy.
2. Methodology of the Study
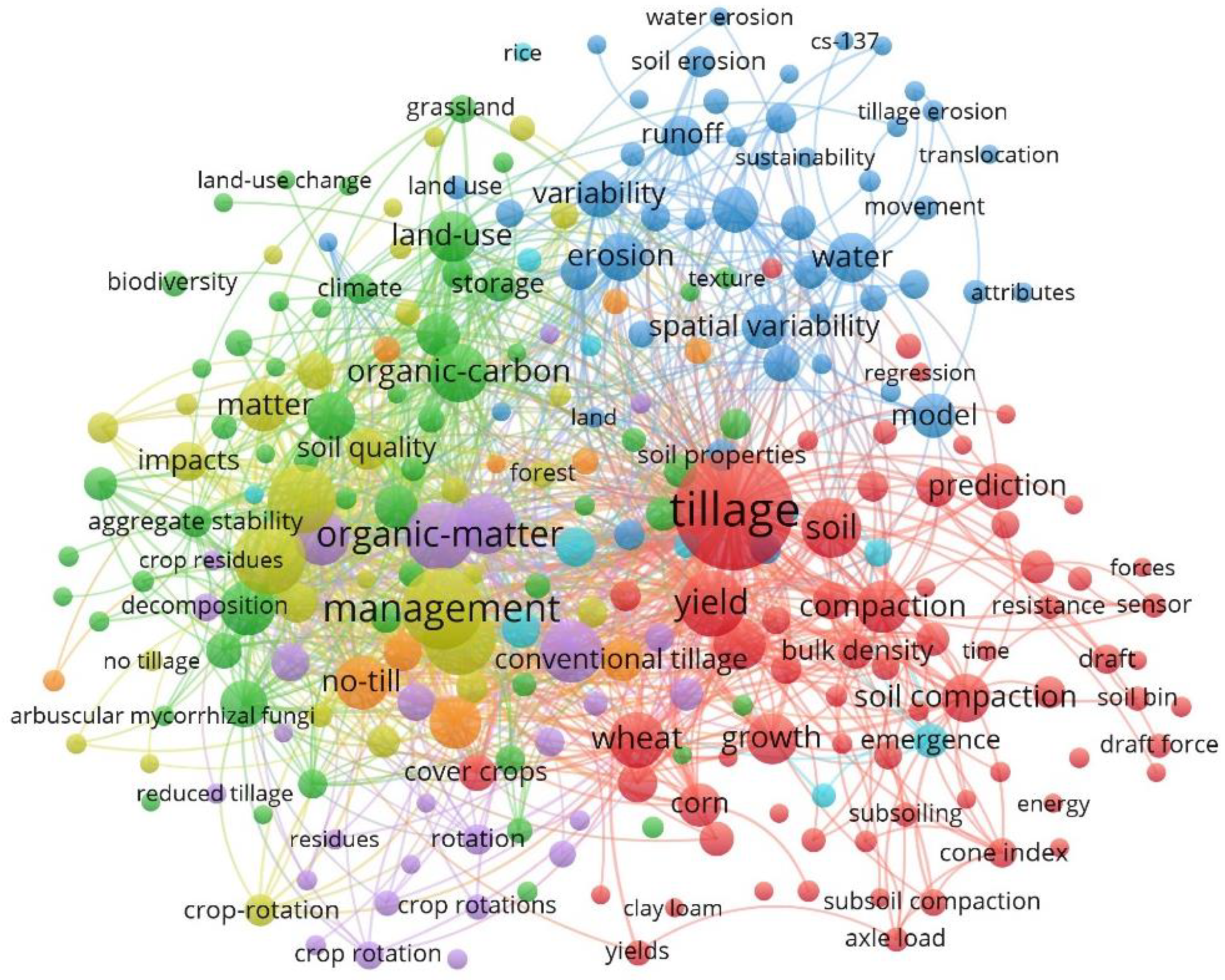
The right choice of keywords by the authors of the publications is of great importance to introduce the research topic well, present the scientific article, and inform the scientific community [
20]. The “VOSviewer” computer program and the Clarivate Analytics Web of Science (WoS) database of scientific publications, which is important in the scientific community, were used to perform a detailed analysis of the chosen topic. “VOSviewer” (version 1.6.20) is a software tool developed by researchers at the Centre for Science and Technology Studies at Leiden University in 2023, which can be used to construct and visualize bibliometric networks and to create network visualization maps. This computer application links keywords to the metadata of articles found in the database. As keywords are usually provided by the authors of the publication themselves, they reflect the main questions, themes, or concepts addressed in scientific articles [
21]. Analyses can include journals, researchers, or individual publications and can be constructed based on citation, bibliographic linkage, co-citation, or co-authorship [
22]. “VOSviewer” performs keyword duplication analysis of publications, identifying keyword pairs and word combinations that often appear together in the same articles. The frequency of all occurrences determines the strength of the relationship between keyword pairs. Based on the analysis of the total occurrences, “VOSviewer” can create three maps: a network visualization, an overlay visualization, and a density visualization. In the network map, each keyword is represented as a round node. The links between these nodes show co-occurrence relationships and the strength of these links affects the appearance of the network. This application visualizes this network, where keywords are connected by links with co-occurrence links [
23]. The size of the nodes and the color of the links provide information about the importance and strength of the links between keywords. Larger nodes mean that these words are frequently used in publications, darker lines mean that these words are more frequently used together, and lighter lines mean that they are used less frequently.
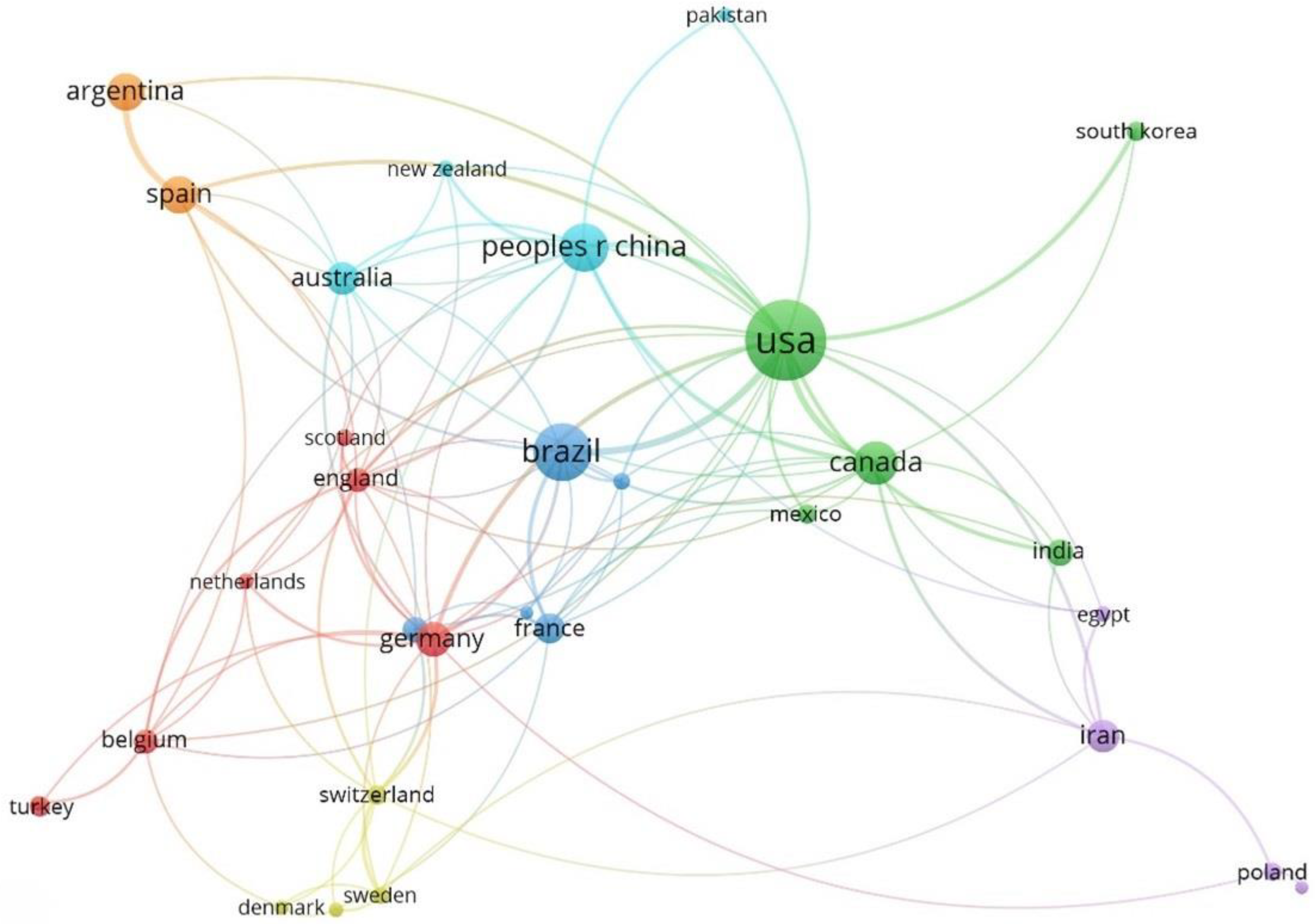
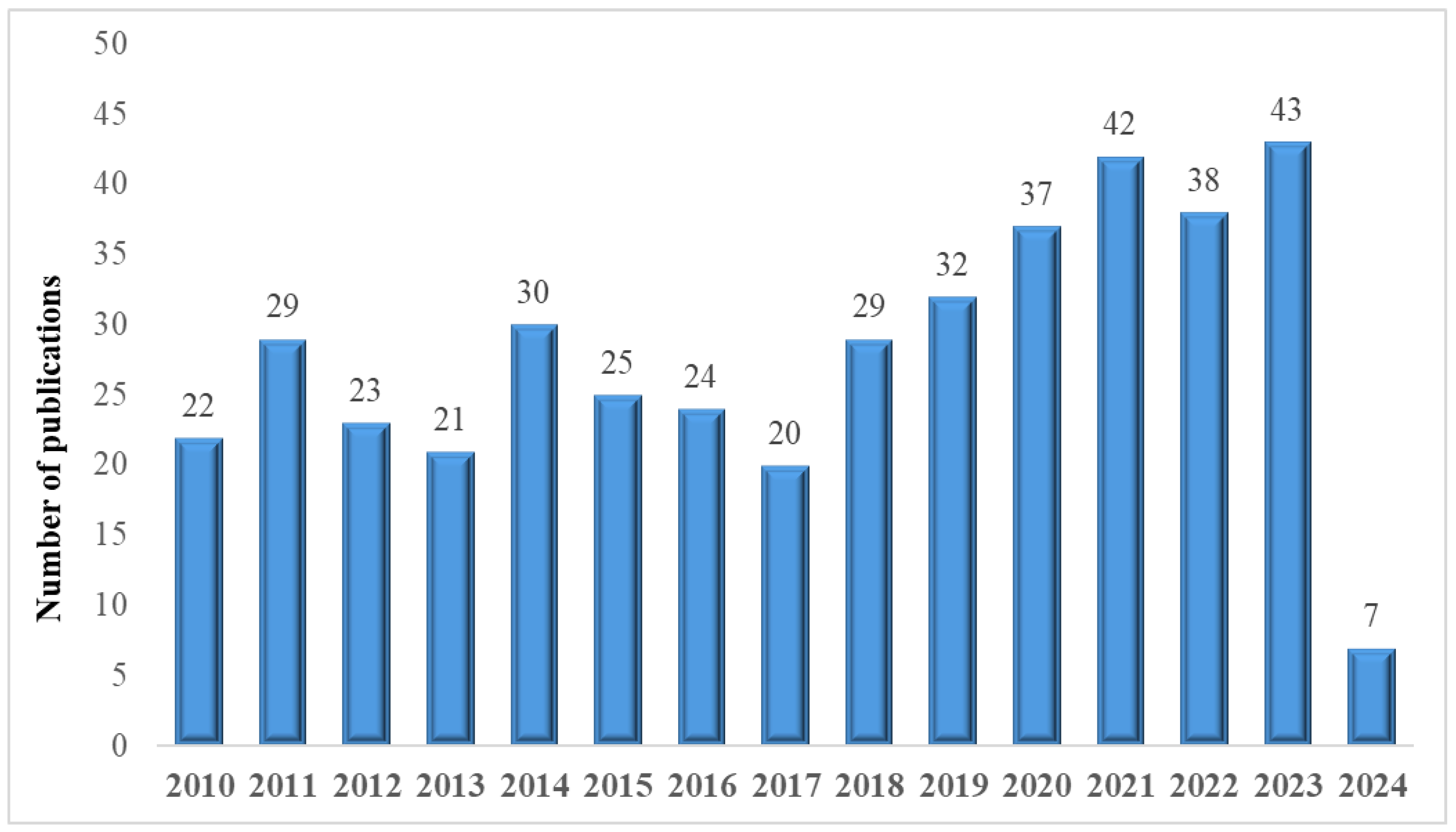
When reviewing scientific papers on a specific agricultural topic, it is very important to select keywords that identify the area of scientific research and visible links to other areas and topics. Appropriate keywords can facilitate the analysis of research papers on the topic, the understanding of the influence of close factors on the topic under consideration, and also the impact of the analyzed topic on related fields. In this study, the analysis was carried out for the keyword “variable depth tillage”. A visualization map was created based on the most important keywords found on this topic and their interrelationships. Another important factor is which country’s authors work most extensively on the topic, as this may indicate relevance to specific climates, specific crops and other conditions. The links between authors’ countries indicate that this topic is relevant to a larger number of countries. For this reason, a visualization map was also created according to the countries whose authors published the most articles on the topic. To assess publication trends, a figure showing publication dynamics by year was produced.
Other chapters of this study cover aspects of the dependence of VDT on soil properties; the measurement methods and equipment used to justify variable-depth tillage; and the impact of VDT on soil, plants, agricultural machinery, the environment, and the economy.
4. Soil Compaction, Its Causes, and Consequences
The need for tillage and, at the same time, the need for variable depth tillage is very much related to the compaction of the soil layers. This means that when considering VDT, it is very important to analyze cases of soil compaction and their possible effects. There is no doubt that a good understanding of the problem of soil compaction layers can lead to appropriate decision-making to manage this increasingly important issue.
Soil compaction associated with increased mechanical loading, engine vibration, tillage under unsuitable conditions, reduced crop diversity, and intensive grazing is a concern for farmers as it increases soil bulk density and soil strength; and reduces soil aggregate stability, hydraulic conductivity, and nutrient availability [
24].
Increasing the productivity of agricultural machinery inevitably increases the mass of these machines. This is one of the main reasons why tractors, combine harvesters, and other agricultural machinery with high mass have a strong impact on different soil layers. High soil compaction triggers various soil degradation processes related to soil erosion, uneven distribution of nutrients and fertilizers in the soil, conditional “locking” of the soil; and physical, chemical, and biological degradation [
24,
25,
26]. Without timely action, the scale of the problem can only increase, as reducing soil compaction requires the use of deeper and deeper tillage implements, which may not be very environmentally friendly. The long-term direct and indirect consequences of soil compaction can be costly, with losses of hundreds of millions of euros in individual countries [
26].
Soil compaction is strongly influenced by repeated driving in agricultural fields during different farming operations. Studies have shown that up to 95.3% of the total field area is covered by the wheels of agricultural machinery at least once a year in conventional tillage [
27]. Minimum tillage and direct drilling resulted in up to 72.8% and 55.7% of the total field area being wheeled, respectively. Researchers [
27] estimated that 90.9% of the total field area could be affected by the wheels of agricultural machinery through repeated application of conventional tillage; 44.8% by minimum tillage, and 18.4% by direct drilling. Tullberg et al. [
28] reported that, given normal tractor-tire combinations and normal levels of traction efficiency, the field area affected by wheel traffic is typically 20–35% for each operation. The more tillage, sowing, crop maintenance, and harvesting operations and the smaller the natural width of the agricultural machinery, the more the total field area is affected. Liu et al. [
29] point out that in headlands and field edges, the frequency of agricultural machinery traffic is even more intense compared to the middle part of the field, which results in even stronger soil compaction in these areas. The most common areas of soil compaction are at field entrances and headlands, where machinery turns around or materials are transported during fertilization, spraying, and harvesting operations. Taghavifar and Mardani [
30] investigated the effect of speed, wheel load and multiple passes on soil compaction. They found that the highest compaction at a depth of 210 mm occurred after three passes with the highest wheel load and slowest speed. Wheel load had a greater influence than did speed and number of passes.
Soil compaction caused by anthropogenic activities is one of the most important factors limiting crop yields, as it reduces soil pore size, alters pore size distribution, increases soil hardness, reduces air and water permeability, increases bulk density, and—most importantly—impairs conditions for root infiltration [
31]. Studies have shown that in headlands and the edges of the field, crop yields were between 2.49 and 12.20% lower than in the center of the field due to heavy traffic from agricultural machinery [
29].
There is no sign that agriculture will be able to do without powerful and heavy tractors, combine harvesters, and other agricultural machinery for decades to come. Therefore, soil compaction problems will remain and subsoilers or other deep tillage machinery will have to be used to loosen compacted soil layers. This already entails additional costs in terms of fuel, machinery, labor time, and other economic costs. Each additional centimeter of tillage can increase fuel consumption by between 0.5 and 1.5 L per hectare [
32], depending on the soil’s granulometric composition. Increasing the amount of diesel fuel burned increases the cost of agricultural production and environmental pollution [
26].
The search for agro-engineering solutions to optimize the technological parameters of deep tillage operations must be accelerated to minimize the negative impact on the soil and the environment as a whole. Solutions related to variable depth tillage can help to achieve this. VDT is not new, as a lot of theoretical and some episodic experimental research work has already been carried out; but its practical application in agriculture is still weak. It is important to recognize that VDT is not the only method of reducing soil compaction. Cover crops with strong tap roots can also be effective in reducing soil compaction, especially with no-till, but this may take longer [
33].
Soil compaction is strongly influenced by the soil’s physical properties, which are mainly determined by soil types [
34,
35]. Physical properties can be assessed by examining soil texture and structure. The effects of compaction are reflected in soil density, porosity, and permeability [
24]. Soil compaction leads to an imbalance between the liquid and gaseous parts of the soil, which is defined as an increase in soil mass in the same volume.
5. Methods and Equipment for Determining Soil Compaction
When planning to apply a precision variable depth tillage (VDT) system in agriculture, it is necessary to have a good understanding of soil compaction problems. Accurate identification of compacted soil layers can facilitate the application of VDT, but this requires a good knowledge of the available methods and tools for determining soil compaction.
Typically, compacted soil layers can be detected with penetrometers that are hand-held or mounted on SUVs, ATVs, or other machinery. Different groups of researchers [
36,
37,
38] have used penetrometers to determine variations in soil resistance to penetration. Such studies have been quite time consuming and have produced very variable and, in some cases, misleading results in dry soils [
39].
Differences in soil characteristics can be detected before the tillage operation and in real time during tillage. Measurements of field soil characteristics before tillage have the disadvantage of requiring additional time. Meselhy [
31] developed a horizontal penetrometer consisting of a tine with several horizontal sensors using replaceable cone tips. The purpose of the instrument was to measure soil penetration resistance at multiple depths. The sensor tips were mounted horizontally on the front of the tines. The sensing shafts were mounted horizontally on the tines at depths of 25, 35, and 45 cm from the soil surface. This measuring device is designed to measure and record changes in output voltages by changes in variable resistance.
Mouazen and Ramon [
40] carried out experimental studies with a developed device consisting of a sensor system for online measurement of soil density. Measurements of depth and draught were made using a metal wheel equipped with the necessary sensors. Soil moisture was measured online using a Vis-NIR spectrometer sensor. The position of the machine was recorded by a GPS and radar. The results showed that the overall mean error of the online soil density measurements was small (2.3%). However, measurements in very dry soil conditions did not allow proper detection of compacted zones, and showed relatively high errors.
Atanasov et al. [
41] presented a cultivator-based method for measuring soil density. Soil density measurement can be carried out using a cultivator with a strain gauge fitted to each working body. Once the cutting resistance of the soil has been measured, the sensors provide reliable information on the soil density, and a soil density map of the treated area can be produced. The advantage of this measurement method is that standard tillage machinery can be used rather than machinery specially adapted for the measurement. The distance traveled is measured over time based on the working speed, and GPS equipment must be added to know the exact coordinates of the measured points and to create a field map. Fox et al. [
42] developed a “smart plow” system that measured soil density directly during plowing and adjusted the depth of tillage in real time based on the data obtained. The study showed that the fuel consumption of the VDT was 45% lower than that of constant-depth tillage.
Another soil property that is used to determine the variability of soil characteristics is apparent electrical conductivity (ECa). It depends on the soil’s granulometric composition and texture. Different soils have different ECa, with sand having low conductivity, silt having medium conductivity, and clay having high conductivity [
43]. Abbaspour-Gilandeh et al. [
19] found that ECa increases with increasing clay content in the soil and obtained a strong linear relationship between soil ECa and soil texture and tillage draft requirement. Knowing the interaction between ECa and soil compaction, this approach may be promising for the application of a soil compaction map-based VDT system [
25].
However, for higher productivity and to be able to change the tillage depth in real time during VDT, smart sensors that can predict possible compaction of soil layers at different depths based on soil properties are needed. A schematic diagram of the impact of soil properties, sensors, and VDT on soil, plants, agricultural machinery, the environment, and the economy is presented in
Figure 4.
The sensors used to determine soil compaction have been described in detail by other researchers [
44,
45]. They classify sensors for soil compaction into three groups; i.e., water content, soil strength, and fluid permeability sensors. Hemmat and Adamchuk [
44] point out that the mechanical strength of the soil is highly dependent on the moisture content of the soil, and therefore it is useful to measure the water content of the soil and the mechanical strength of the soil simultaneously. This type of water content sensor can be integrated into vertical cone penetrometers. Mouazen et al. [
46] have developed a sensor for the online measurement of water content using a fiber-type visible and near-infrared (NIR) spectrophotometer. Such a sensor was attached to the backside of a subsoiler chisel to detect the reflection of light from the bottom of the chisel-opened furrow. They demonstrated that the spatial patterns of soil’s water content obtained using this sensor and oven-drying soil samples were similar [
44,
46].
Soil structure, pore size distribution, hydraulic conductivity, and air permeability can be characterized as soil quality attributes that influence the so-called fluid permeability [
44]. Laboratory or field measurements of fluid permeability can use water as the fluid that diffuses through the bulk soil. A low rate of water movement through the soil indicates soil compaction caused by heavy traffic or plowing in wet conditions. These principles can be applied to better understand soil’s structural changes and make better management decisions [
45].
Soil strength sensors are widely used to assess the degree of soil compaction. They can be used to determine general or local compaction in each soil layer by measuring traction or vertical force using bulk soil strength or vertically actuated sensors. Alternatively, soil strength profiles can be determined in the field using conventional tip-based or tine-based soil sensors. Soil mechanical resistance determined by sensors is usually expressed in pressure units and represents the force required to penetrate the soil layer [
45].
6. The Effect of Variable Depth Tillage
There is not much experimental research in the world specifically on the effects of variable depth tillage on crops, the economy, and the environment. However, there have been a number of studies on different types of deep tillage. Huang et al. [
18] carried out a meta-analysis based on over 200 studies conducted worldwide, which showed that crop yield increases with deep tillage at 25–35 cm depth and then decreases with increasing tillage depth. According to the authors [
18], the optimal depth of tillage for wheat, maize and soybean worldwide is 35 cm; and this depends on different climatic regions. Areas with humid climates required deeper tillage than arid areas. In addition, soils with higher clay content and bulk density required deeper tillage. The analysis showed that a depth of 30 cm was more suitable for temperate zones such as the western United States, northern Europe, southern Russia and eastern China, which could increase crop yields. In general, 35 cm was suitable for most tropical regions and parts of temperate zones such as North and South America, Europe, Africa, South Asia, and southern Australia [
18].
Variable depth tillage (VDT) refers to the possibility of adjusting the depth of tillage in agricultural operations. This flexibility is very important for several reasons. VDT can have a positive impact on soil properties, soil health, moisture management, weed control, effective erosion prevention, reduced costs for crop production, and environmental sustainability [
31,
47]. In essence, variable depth tillage allows farmers to have more control over soil management, allowing them to tailor their practices according to the needs of their crops and field conditions. This can lead to improved yields, better soil health, and more sustainable farming practices [
26,
42].
VDT is particularly useful when there is high field variability. Fields often vary in soil type, texture, and compaction level. VDT allows farmers to adapt tillage operations to different areas of the field, optimizing soil preparation for sowing and promoting uniform crop growth. Another very important factor is crop rotation, as different crops have different rooting depths and requirements, which strengthens the interrelationship between crop rotation and tillage [
48]. VDT allows tillage to be adjusted to meet the specific needs of the plants in each rotation, promoting healthier root development and improving overall crop performance. Compacted soil areas are important for successful crop production. Agricultural fields with compacted soil layers can benefit from deep tillage to reduce compaction and improve soil structure [
47]. VDT directs attention to compacted areas of the field and at the same time reduces disturbance in areas of the field where the soil structure is already favorable. Different tillage practices can be incorporated into integrated weed management strategies [
49] to disrupt weed seed germination and reduce weed pressure [
5]. By adjusting tillage depth, weed seeds can be buried deep where they are less likely to germinate, which reduces the need for herbicides. The use of VDT for deep subsoil loosening; i.e., changing the physical characteristics of the soil only in areas where tillage is required for crop growth, can reduce the need for labor, fuel, and other inputs [
50].
Different crops have different root systems and soil conditions can also vary considerably from one field site to another [
4]. Adjusting tillage depth can better adapt to field heterogeneities and ensure that the soil is tilled to the optimal depth for root growth and nutrient uptake. Deep tillage may be needed to break up compacted layers, while shallow tillage may be sufficient in areas where the soil structure is already favorable [
31], suggesting that VDT can play a strong role here [
25]. A value of 2 MPa can be considered as a critical value of the cone index, where root penetration and plant development are severely hampered. At a cone index value of 3 MPa, crop growth becomes limited [
31]. Studies have shown that VDT—in particular intermittent deep tillage—optimizes soil structure, the underground ecological system, and soil fertility, leading to improved soil physical properties, reduced soil compaction, and better conditions for plant growth [
51].
Moisture management. VDT can be used to manage soil moisture levels more effectively, especially in areas of drought or excessive precipitation. Deeper tillage can attract moisture from the lower layers of the soil profile and help to improve water infiltration and retention, which can be beneficial in dry conditions. Conversely, shallow tillage can help to conserve moisture by reducing evaporation from the soil surface, and can prevent waterlogging. Deep subsoiling can break up compacted topsoil, also known as “hardpan”, without the need to turn over and mix soil layers [
47]. Researchers [
52] conducted a study and found that deep subsoiling improves water infiltration, internal drainage, and soil aeration; ameliorates the intensity and development of deeper root penetration; and allows for deeper fertilizer application. These researchers also evaluated the effect of tillage depth on soil physical properties and found that deep tillage (>20 cm) resulted in lower penetration resistance, lower soil bulk density, higher soil air-filled pore volume, and higher soil hydraulic conductivity [
52]. The water content of the soil has a strong influence on the measurement of soil density as one of the key factors for planning appropriate agrotechnical measures [
41].
Cost savings and efficiencies. By adjusting the depth of tillage, farmers can optimize the use of inputs such as fertilizers and pesticides. By directing these inputs to the root zone of the crop, farmers can improve efficiency and reduce waste. It is estimated that for about three-quarters of the field area, tillage operations can be shallower than conventional deep tillage [
31]. VDT systems can help farmers reduce fuel consumption and machinery wear and tear by allowing them to adapt tillage operations to specific field conditions. This can lead to cost savings over time. The energy required to pull a tillage implement is directly related to working depth, implement geometry, travel speed, implement working width, and soil properties [
31]. The most important soil properties that can increase the energy input for subsoil tillage are moisture content, bulk density, cone index, and soil texture [
53]. The most common application of energy-intensive uniform subsoiling assumes that compacted soil layers are at a constant depth. However, the relative depth of compacted layers, including the pan formed by a plow plowing at a constant depth, can vary between fields and between locations within a field [
31,
54]. A uniform depth of subsoil can be applied in areas of the field where there are no soil compaction problems. However, the energy used and diesel fuel burned in constant depth tillage may not achieve the desired soil conditions. Variable depth tillage may therefore have advantages over constant depth tillage. VDT is geared towards achieving sustainable agricultural objectives by using precision farming methods to detect soil variability in the field and to obtain more accurate soil compaction records. VDT can be the key to reducing the energy and fuel costs of tillage, and delivering benefits for crop profitability, ecology, and the environment. Raper et al. [
55] reported that shallow tillage (about 18 cm) generally had about 50% lower draught and energy requirements compared to deep tillage (about 33 cm). Other researchers have reported that energy consumption could be reduced by up to 34% [
56] and fuel consumption by up to 50% [
57] using a VDT system. Research by Khalilian et al. [
58] showed that VDT saved 42.8% energy and 28.4% fuel compared to tillage at the same depth. Similar research published in another scientific paper showed that VDT application at 25 and 35 cm depths resulted in a 35% and 59% reduction in tractive effort and a 27% and 43% reduction in fuel consumption, respectively, compared to tillage at the same 45 cm depth [
59]. In three different tillage depths of 25, 35, and 45 cm under uniform depth and VDT methods, it was found that VDT reduced fuel consumption by 35%, 35%, and 23%, respectively; and field productivity increased by about 21% using VDT compared to constant depth tillage [
31]. Abbaspour-Gilandeh et al. [
19] presented in their study the effect of VDT on fuel and energy reduction compared to traditional uniform tillage depth depending on soil type, soil moisture, and travel speed. They found that, in sandy loam soil, VDT reduced energy and fuel consumption by 21% and 8%; and in sandy soil by 26.1% and 8.5% respectively. They note that for all soil types, draft force increases with increasing driving speed, but tillage depth has a greater influence than speed. After assessing the influence of soil moisture on fuel consumption, it was found that fuel consumption is negatively correlated with soil moisture [
19].
Environmental and economic impact. Deep tillage can help loosen compacted soil layers, improve water infiltration, and reduce surface runoff. This can help prevent soil erosion, especially in sloping terrain. The choice of the right tillage strategy to solve soil compaction problems can make a strong contribution to reducing negative environmental impacts; in terms of reduced diesel fuel burned by high-power tractors, better uptake of chemical fertilizers, and reduced leaching of chemical fertilizers into water bodies [
26]. Equally importantly, proper management of soil compaction can improve the economic situation of farming [
60]. Reduced fuel and crop inputs, and slower wear and tear of farm machinery parts reduce costs while managing soil degradation results in lower losses of fertile soil, preserved soil structure of higher quality and higher organic carbon content, and the potential for increased crop yields and economic benefits [
26,
60].
7. Methods and Equipment for Determining VDT
For more than three decades, researchers have been focusing on the design of control algorithms, control systems, and the structure of the main components of an electrohydraulically actuated coupling system [
61,
62]. As early as the 1970s, electronic technologies were applied to agricultural machinery to electronically control tractor hydraulic linkage mechanisms [
63,
64,
65]. Anthonis et al. [
66] described a mathematical model based on the relationship between tractive effort and three factors such as speed, tillage depth, and soil resistance. Accordingly, the dynamic characteristics of the three models were investigated, which provided the basis for the design of an electrohydraulically controlled hitch system [
63]. Accurate measurements of tillage depth are the basis for the control and optimization of VDT processes. Currently, three main methods are commonly used to measure tillage depth; namely, distance measurement-based (DMB), mechanical installation-based (MIB), and tillage angle measurement-based (TAMB) [
1]. DMB methods are among the simplest, using distance sensors to measure changes in the height of the agricultural equipment from the soil, thus providing real-time data on tillage depth [
1]. MIB methods require much more expertise and special equipment to be mounted on a tractor or implement to measure angles or displacements and to create correlated patterns that allow high-precision measurements [
1]. The TAMB method is characterized by easy installation, high accuracy, and low environmental sensitivity; making it suitable for a wide range of applications. The method uses data from inertial tillage sensors attached to a hydraulic suspension mechanism. The measurement of tillage depth is based on the determination of a geometric correlation between depth and angle parameters [
1].
Borchelt and Smith [
67] proposed some schemes for tillage depth control based on position control, traction control, and mixed traction–position control. Position control means that once the exact depth of tillage is set, no matter how tillage resistance changes, the depth of tillage remains constant. Position control is more appropriate when the implement is shallow and the soil resistance is low. However, in deep tillage, the tractor engine load increases as the soil resistance increases. Deep tillage can therefore cause the engine to overload and stall when the load reaches its maximum limit. To adjust the plowing, it is advisable to adjust the depth according to the change in soil resistance. When the soil resistance to plowing is below the limit, the depth of tillage will not change, but when it exceeds the limit, the depth of tillage will be reduced in order to reduce the soil’s resistance to plowing and avoid engine overload.
Han et al. [
16] propose a comprehensive control method based on engine load and tillage depth. Such a method evaluates the engine load status through the load characteristics of the engine, then adjusts the plow tillage depth and adjusts the engine operating condition by changing the tillage depth. This method can automatically control the tillage depth and allow the engine to work more efficiently.
Gao et al. [
63] presented a tested electrohydraulically controlled hitch system for agricultural machinery consisting of a hydraulic device, a three-point hitch mechanism, and a control system. The hydraulic device is electronically controlled by an ECU control system, where an electromagnetic proportional valve can change the flow rate and direction of the hydraulic oil flow according to a control signal, allowing the hitch to be operated and the implement to be raised or lowered. The test results of these authors [
63] showed that the motion of the hydraulic actuator was stable and responded well to the depth control.
Tahmasebi et al. [
50] developed and tested a pneumatic multi-nozzle sensor to measure the mechanical resistance of soil by injecting air flow into the soil and simultaneously measuring resistance to air permeability. Such a sensor, with three 10 mm diameter nozzles mounted on a tine at the front of the tractor, was able to simultaneously predict the depth in three soil layers (15, 30, and 45 cm) and to transmit a signal to the control of the VDT implement.
Large agricultural machinery manufacturing companies such as John Deere, CASE, and Topcon have already developed depth monitoring and control systems for tillage machinery [
47]. Topcon has developed a tillage depth sensing system for NORAC machines that relies on four ultrasonic sensors to detect the tillage depth of four-disc gangs [
47]. The special feature of this system is that it can adjust the tillage depth of each disc pair individually, according to surface changes. CASE agricultural machinery manufacturers have adapted their intelligent AFS (Advanced Farming Systems) with an auxiliary hydraulic system to monitor tillage depth [
47]. John Deere has developed the TruSet monitoring system with an ultrasonic sensor attached to the main frame of the tillage machine to measure working depth directly from the soil surface. This system requires no intervention from the tractor driver and adapts to different field conditions [
68]. Such control systems can accurately determine the depth of tillage and fine-tune the depth of the tillage machine to the desired values [
47].
Recent advances in the field of tillage depth monitoring are mainly related to the technologies used for real-time automatic depth measurements, which can be divided into two main categories: contact-type and non-contact-type [
69]. Ultrasonic and optical sensors, which are commonly used for non-contact measurements, have been extensively investigated by several researchers [
70,
71,
72] in previous years. Tillage depth can be determined by an ultrasonic sensor mounted on the tillage implement or by an optical distance meter mounted on the tractor [
73]. The accuracy of non-contact sensors can be strongly influenced by the condition of the soil surface, especially when the surface is covered by crop residues, in the case of conservation tillage or no-tillage technologies [
64]. In contrast, contact tillage depth measurements, where a physical element is used in direct contact with the actual surface, can still be applied on covered land. Several researchers [
74,
75] have presented a contact method based on a geometric relationship between tillage depth and the tractor lift arm angle. However, this system can only measure the tillage depth on a horizontal surface, as the measurement is made relative to the horizontal plane. Many works show that there is still a lack of a simple, tractor-mounted measurement system that can be adapted to the soil surface and can be used for real-time monitoring of the depth of tillage [
69].
8. Summation and Future Perspectives
To summarize the results of this review of scientific papers: it was found that variable depth tillage (VDT) can be a very important factor in solving the problems caused by compacted soil layers. It should be emphasized that neither conventional deep tillage nor VDT can solve all the problems associated with soil compaction and plant root penetration; but in many cases, they can successfully contribute to or complement the solution. The results of the analysis showed that tillage is closely related to many issues such as soil bulk density, soil properties, soil quality, organic carbon, plants, crop rotation, germination, erosion, climate, draft force, etc.; which tillage can influence or be influenced by.
Optimizing tillage depth can improve soil health, conserve resources and improve overall agricultural sustainability. However, the analysis of the review showed that applying the principles of VDT is not easy. Researchers from different countries have analyzed the practical application of different compaction detection methods and sensors, but still have not found simpler solutions for VDT use.
Looking to the near future, there is no doubt that precision tillage technologies, including agro-engineering solutions associated with the wider use of VDT in agriculture, will become increasingly popular. However, there are still many uncertainties associated with the use of fully automated depth control of tillage systems based on input data obtained from on-the-go (also known as online) proximal soil sensing. In addition, there are still many unanswered questions when analysing the application of VDT to strip tillage and minimum tillage, where compacted soil layers are formed at shallower depths. Smart farmers will face considerable challenges in applying VDT while maintaining similar travel speeds, process quality, accuracy, and labor efficiency as those achieved with uniform depth. The use of proximal soil sensing technologies coupled with electromagnetic induction, gamma rays, and multi-sensor data fusion to provide input for recommended tillage depth would be beneficial in the future.


{kind=link}
{kind=link}
{kind=link}
{kind=link}