
Design, Integration, and Experiment of Transplanting Robot for Early Plug Tray Seedling in a Plant Factory


Abstract
1. Introduction
2. Materials and Methods
2.1. Materials
2.1.1. Robot System Setup
- Structural composition
- 2.
- Analysis of robot workspace
- 3.
- End effector control
- 4.
- Control system
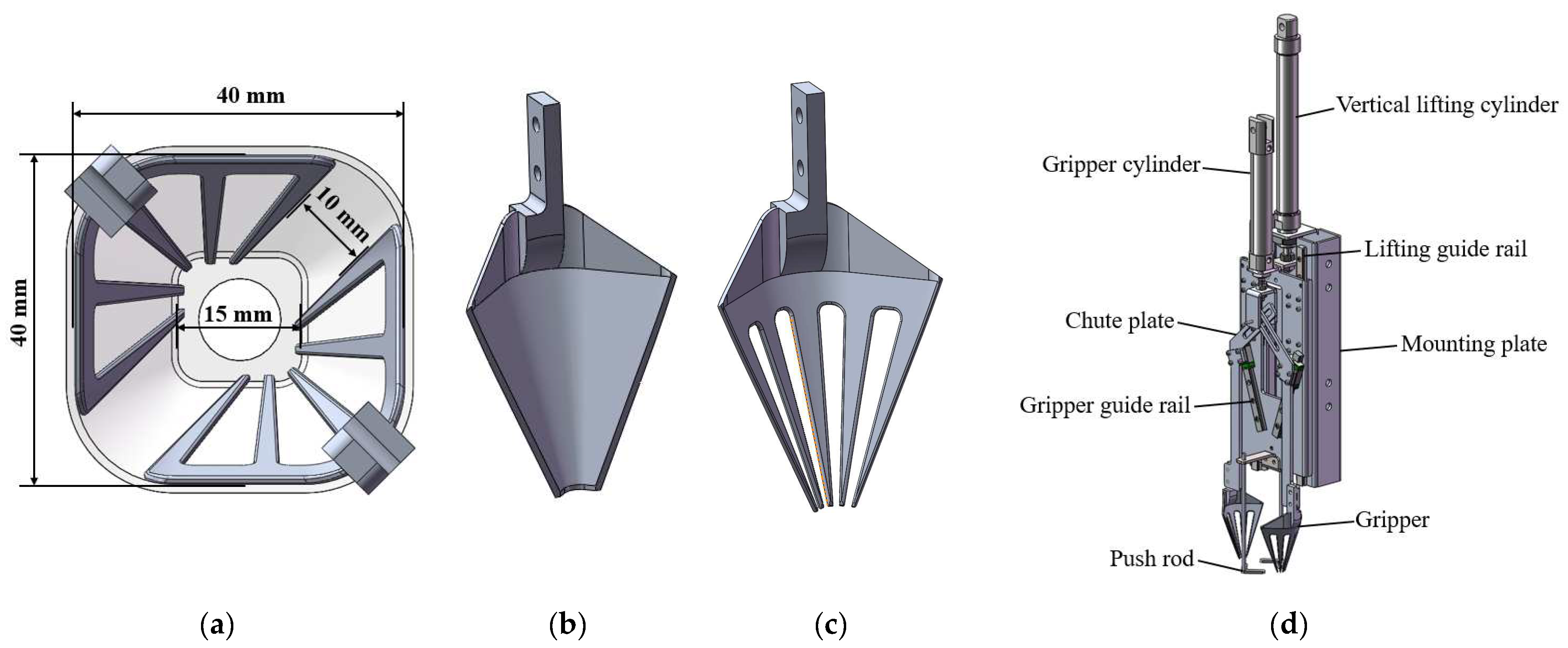
2.1.2. Design of End Effector
2.1.3. Seedlings for Experiment
2.2. Methods
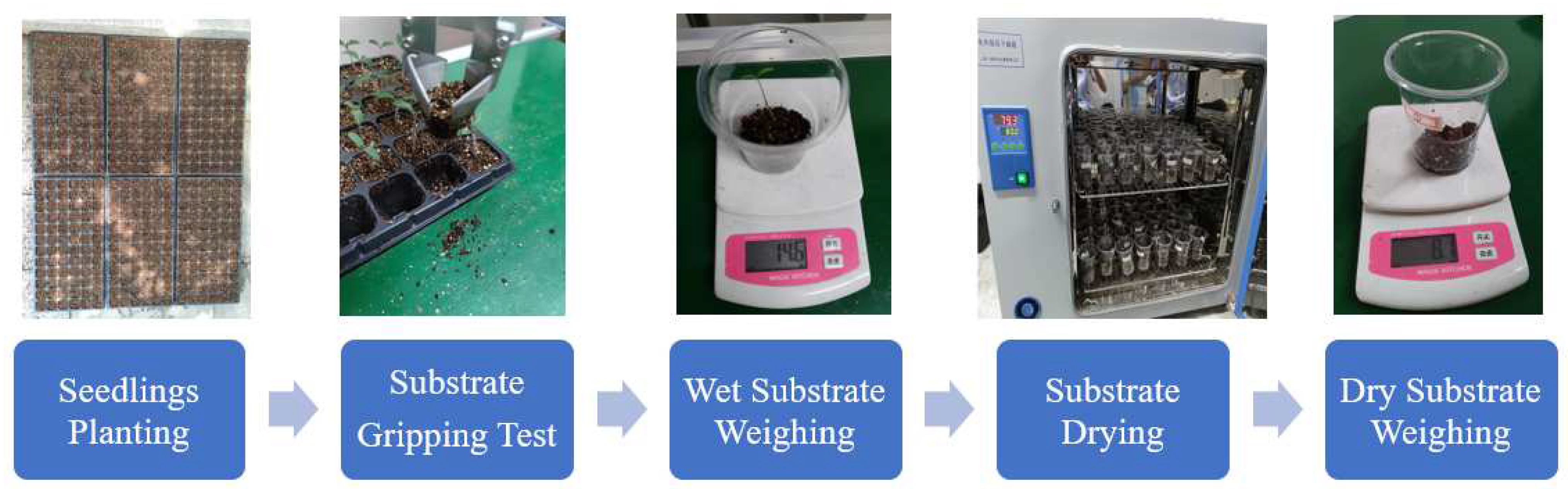
2.2.1. Grasping Test Method
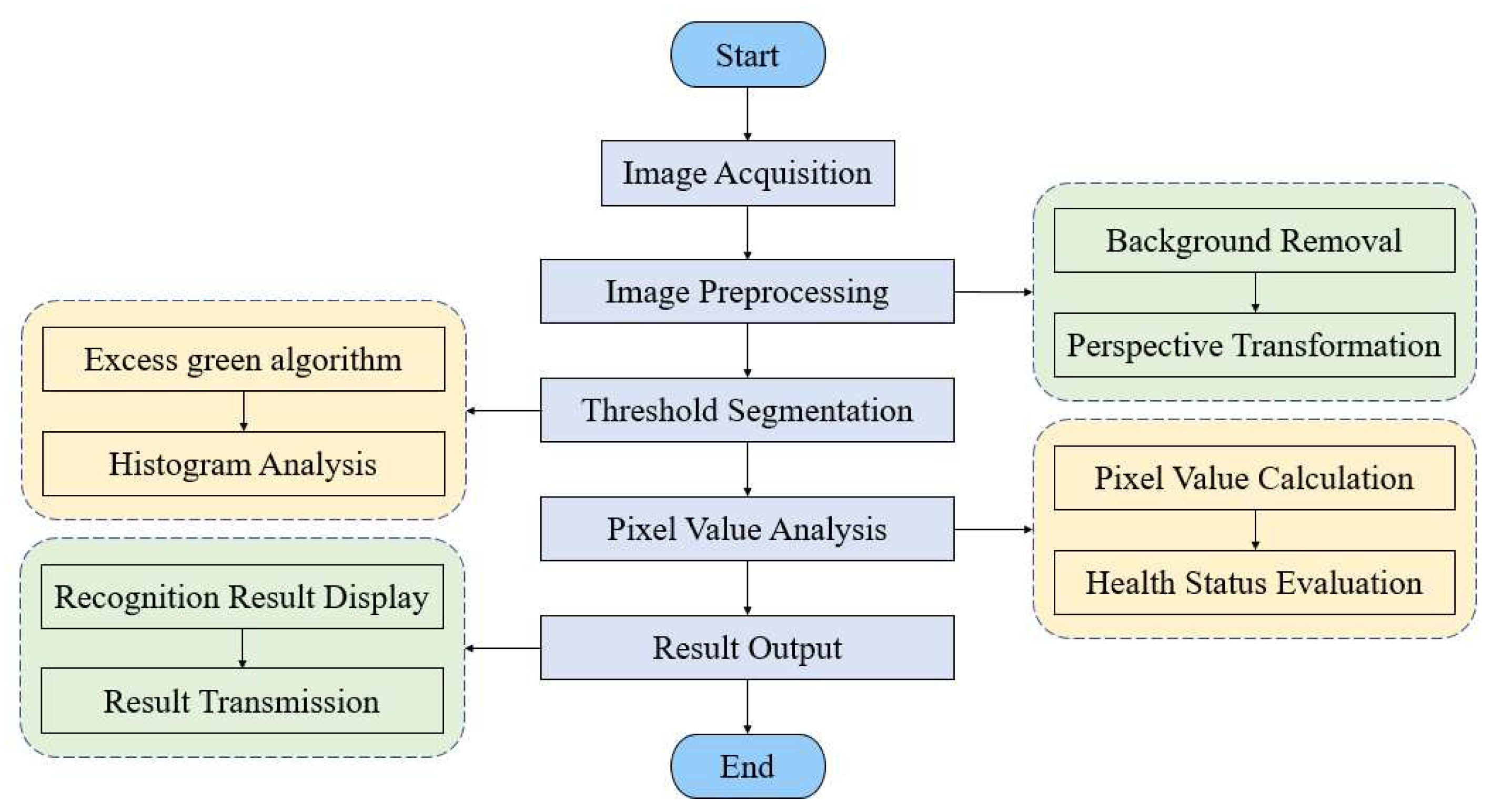
2.2.2. Visual Recognition Method
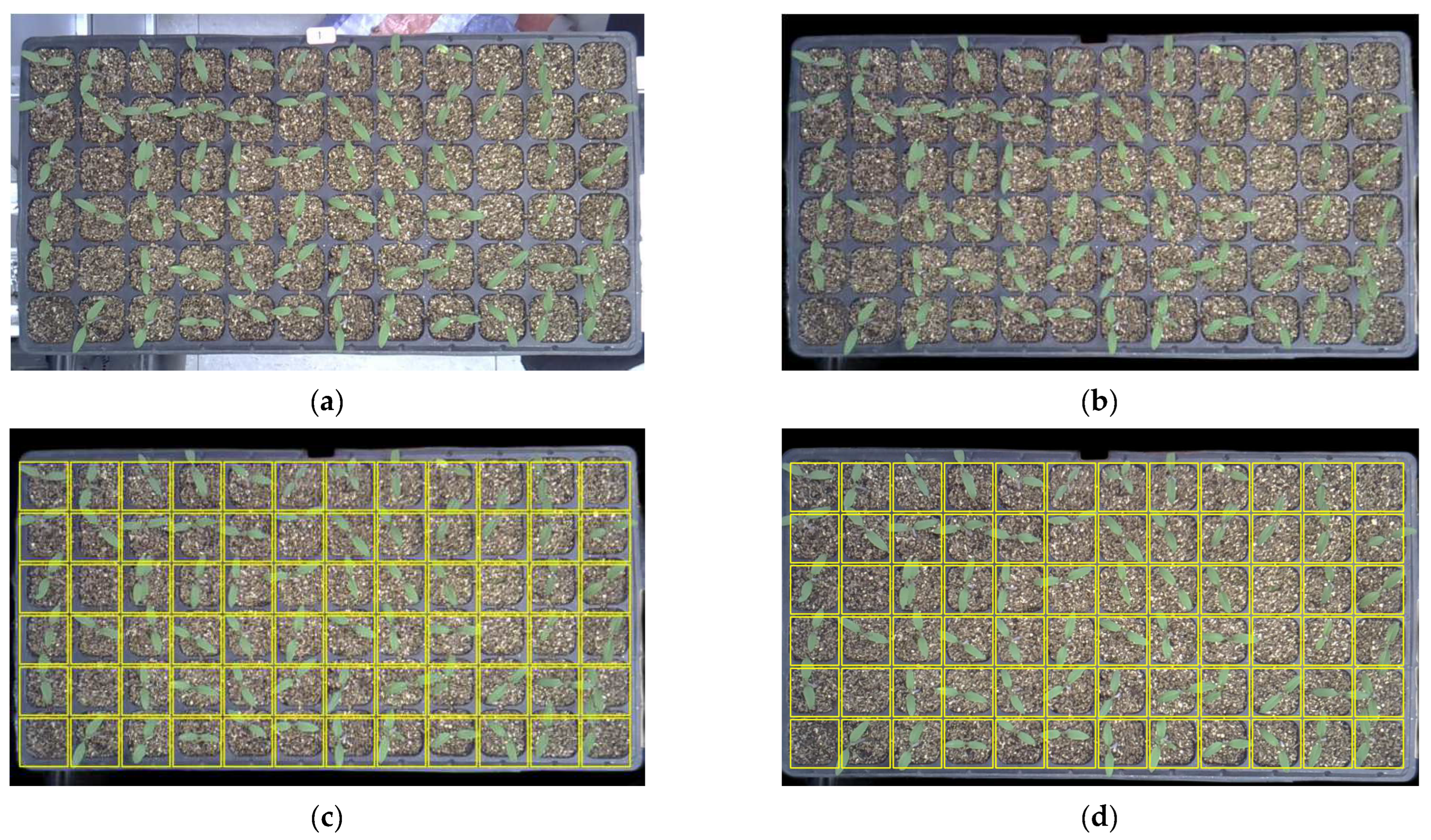
- Image preprocessing: Firstly, the rembg algorithm, an open-source tool available on GitHub, was employed for background removal in the seedling tray images. This algorithm, built upon the u2net deep learning model, exhibits rapid and precise background elimination capabilities. Compared to the original image in Figure 7a, the image without background using the rembg algorithm has less noise, as shown in Figure 7b. Due to discrepancies in the camera’s installation position and angle, image skewness was observed. To mitigate the impact of image skewness on recognition accuracy, a perspective transformation was applied to rectify the images. We superimposed a grid on both the original and the corrected images, with grid cells matching the size of the holes, as shown in Figure 7c,d. It became evident that the corrected image aligned better with the grid, indicating improved alignment and accuracy.
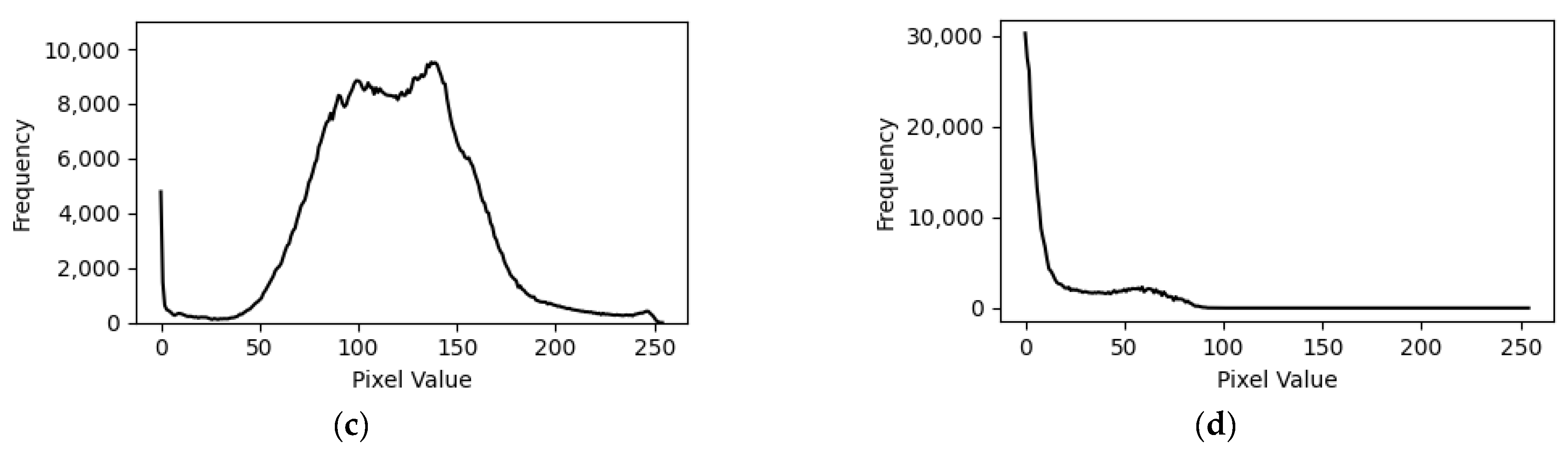
- Grayscale processing: Two grayscale algorithms were compared for image processing. The first one utilizes the grayscale algorithm provided by OpenCV with the formula 0.114 ×b + 0.587 × g + 0.299 × r. The second one is the Excess green (ExG) algorithm with the formula: 2 ×g − b − r. The processed images and grayscale histogram images are shown in Figure 8a–d. By comparing the results of these two methods (Figure 8a and Figure 8b), it is evident that the ExG algorithm effectively reduces the prominence of the tray and substrate in the image and provides better extraction of green leaves. The pixel-value histograms of the images processed by the ExG algorithm (Figure 8c) show more significant differentiation than the grayscale algorithm provided by OpenCV (Figure 8d), which is more favorable for subsequent leaf segmentation processes.
- Threshold segmentation: Gaussian filtering was applied to the grayscale image to reduce noise. Subsequently, we used both adaptive threshold and Otsu’s method [35] to binarize the denoised grayscale image. As shown in the results, the image processed using the adaptive threshold method (Figure 9a) still contains a significant amount of substrate that was not effectively removed, resulting in considerable noise. Otsu’s method (Figure 9b) produced better segmentation results than the adaptive threshold method. Therefore, we chose to use Otsu’s method for threshold in our further analysis.
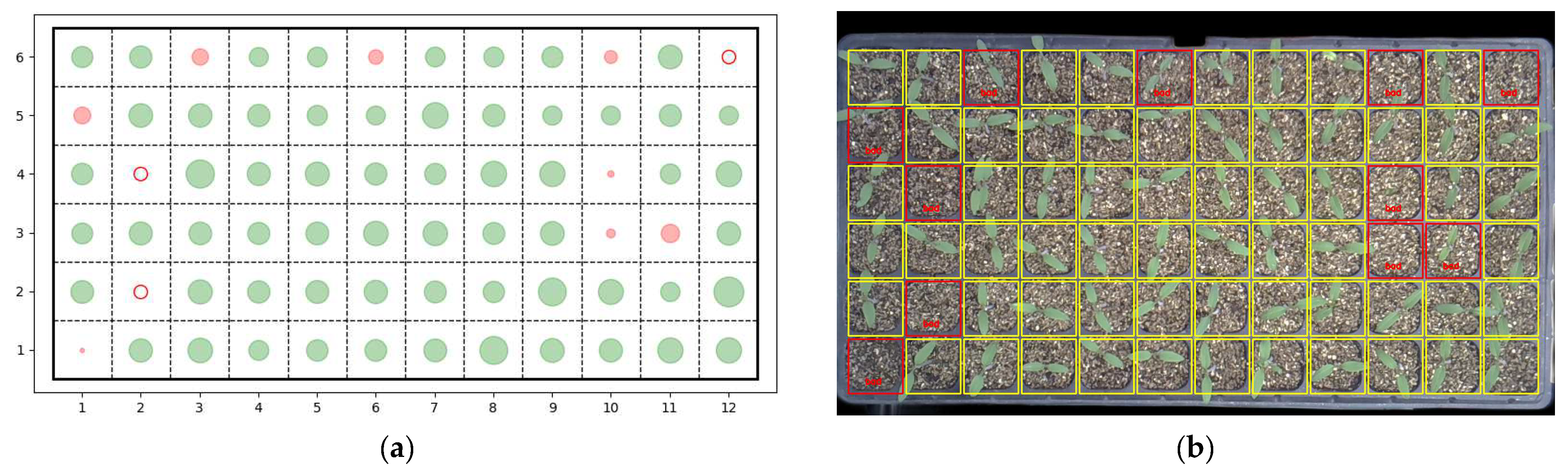
- Pixel value analysis and result output: Following the previously mentioned method, a grid matching the size of the tray’s holes was overlaid on the binarized image. Then, the pixel values in each grid were counted. The qualification of seedlings was determined by setting an appropriate pixel threshold. These pixel values were visualized using Matplotlib, as shown in Figure 10a, where more giant bubbles represented higher pixel values. Green bubbles represented healthy seedlings, red bubbles represented inferior ones, and red hollow circles indicated pixel values of 0, signifying the absence of seedlings in those regions. Finally, the processing results were displayed, as shown in Figure 10b, and the row and column data for unhealthy seedlings were output as arrays for robot control.
2.2.3. Robot Positioning Method
- Use the plug tray positioning block to limit the target tray and the seedling supply tray to fixed positions, ensuring that the positions of the two trays relative to the UR5 robot base remain unchanged during removing and replanting operations.
- Number the hole positions of the tray in row M and column N, and manually teach the robot to move to the three corner positions of the tray (as shown in Figure 11) at , , and , and record the coordinate values of the robot at these three points in the world coordinate system of the robot.
- Due to installation errors causing misalignment between the coordinate axes of the robot system and the edges of the plug tray in the robot’s coordinate system, vector methods can be employed to calculate the position coordinates of target points. The visual system identifies the inferior seedling according to the method in Section 2.2.2 after the image of the plug tray seedlings is obtained. If the position of the inferior seedling is in row i and column j, as shown in Figure 11a, the vectors satisfy the following relationships:
- After calculating the coordinate data of the hole position, the computer sends the position data to the UR5 robot controller through wireless communication, thereby controlling the robot to eliminate inferior seedlings sequentially according to the planned path.
3. Results
3.1. Grasping Effect
3.2. Test of Inferior Seedling Recognition
3.3. Removal and Replanting Test
3.3.1. Automatic Removal Test
3.3.2. Automatic Replanting Test
3.3.3. Effect Analysis of Transplanting Operation
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, Z.; Yang, R.; Gao, F.; Wang, W.; Fu, L.; Li, R. Segmentation of Abnormal Leaves of Hydroponic Lettuce Based on DeepLabV3+ for Robotic Sorting. Comput. Electron. Agric. 2021, 190, 106443. [Google Scholar] [CrossRef]
- Hiwasa-Tanase, K.; Ezura, H. Molecular Breeding to Create Optimized Crops: From Genetic Manipulation to Potential Applications in Plant Factories. Front. Plant Sci. 2016, 7, 539. [Google Scholar] [CrossRef]
- Li, J.; Wu, T.; Huang, K.; Liu, Y.; Liu, M.; Wang, J. Effect of LED Spectrum on the Quality and Nitrogen Metabolism of Lettuce Under Recycled Hydroponics. Front. Plant Sci. 2021, 12, 678197. [Google Scholar] [CrossRef]
- Patil, J.A.; Yadav, S.; Kumar, A. Management of Root-Knot Nematode, Meloidogyne incognita and Soil Borne Fungus, Fusarium oxysporum in Cucumber Using Three Bioagents under Polyhouse Conditions. Saudi J. Biol. Sci. 2021, 28, 7006–7011. [Google Scholar] [CrossRef]
- Viršilė, A.; Brazaitytė, A.; Vaštakaitė-Kairienė, V.; Miliauskienė, J.; Jankauskienė, J.; Novičkovas, A.; Laužikė, K.; Samuolienė, G. The Distinct Impact of Multi-Color LED Light on Nitrate, Amino Acid, Soluble Sugar and Organic Acid Contents in Red and Green Leaf Lettuce Cultivated in Controlled Environment. Food Chem. 2020, 310, 125799. [Google Scholar] [CrossRef]
- Zou, T.; Huang, C.; Wu, P.; Ge, L.; Xu, Y. Optimization of Artificial Light for Spinach Growth in Plant Factory Based on Orthogonal Test. Plants 2020, 9, 490. [Google Scholar] [CrossRef]
- Hanafi, A.; Papasolomontos, A. Integrated Production and Protection under Protected Cultivation in the Mediterranean Region. Biotechnol. Adv. 1999, 17, 183–203. [Google Scholar] [CrossRef] [PubMed]
- Tong, J.; Qiu, Z.; Zhou, H.; Bashir, M.K.; Yu, G.; Wu, C.; Du, X. Optimizing the Path of Seedling Transplanting with Multi-End Effectors by Using an Improved Greedy Annealing Algorithm. Comput. Electron. Agric. 2022, 201, 107276. [Google Scholar] [CrossRef]
- Graamans, L.; Baeza, E.; van den Dobbelsteen, A.; Tsafaras, I.; Stanghellini, C. Plant Factories versus Greenhouses: Comparison of Resource Use Efficiency. Agric. Syst. 2018, 160, 31–43. [Google Scholar] [CrossRef]
- Kozai, T.; Niu, G. Role of the Plant Factory with Artificial Lighting (PFAL) in Urban Areas. In Plant Factory; Elsevier: Amsterdam, The Netherlands, 2020; pp. 7–34. ISBN 978-0-12-816691-8. [Google Scholar]
- van Delden, S.H.; SharathKumar, M.; Butturini, M.; Graamans, L.J.A.; Heuvelink, E.; Kacira, M.; Kaiser, E.; Klamer, R.S.; Klerkx, L.; Kootstra, G.; et al. Current Status and Future Challenges in Implementing and Upscaling Vertical Farming Systems. Nat. Food 2021, 2, 944–956. [Google Scholar] [CrossRef]
- Du, X.; Si, L.; Jin, X.; Li, P.; Yun, Z.; Gao, K. Classification of Plug Seedling Quality by Improved Convolutional Neural Network with an Attention Mechanism. Front. Plant Sci. 2022, 13, 967706. [Google Scholar] [CrossRef]
- Xu, S.; Zhang, Y.; Dong, W.; Bie, Z.; Peng, C.; Huang, Y. Early Identification and Localization Algorithm for Weak Seedlings Based on Phenotype Detection and Machine Learning. Agriculture 2023, 13, 212. [Google Scholar] [CrossRef]
- Liu, W.; Tian, S.; Wang, Q.; Jiang, H. Key Technologies of Plug Tray Seedling Transplanters in Protected Agriculture: A Review. Agriculture 2023, 13, 1488. [Google Scholar] [CrossRef]
- Jin, X.; Li, D.; Ma, H.; Ji, J.; Zhao, K.; Pang, J. Development of Single Row Automatic Transplanting Device for Potted Vegetable Seedlings. Int. J. Agric. Biol. Eng. 2018, 11, 67–75. [Google Scholar] [CrossRef]
- Vera, S.; Prado, S. Synthesis and Optimization of a Needles Robotic Gripper Mechanism for Transplanting Seedlings. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020; pp. 1–6. [Google Scholar]
- Ren, L.; Zhao, B.; Cao, W.; Song, W.; Zhao, M. Design of Stretchable Style Pick-Up Device for Tomato Seedling Transplanters. Agriculture 2022, 12, 707. [Google Scholar] [CrossRef]
- Jiang, Z.; Hu, Y.; Jiang, H.; Tong, J. Design and Force Analysis of End-Effector for Plug Seedling Transplanter. PLoS ONE 2017, 12, e0180229. [Google Scholar] [CrossRef]
- Zhao, X.; Cheng, D.; Dong, W.; Ma, X.; Xiong, Y.; Tong, J. Research on the End Effector and Optimal Motion Control Strategy for a Plug Seedling Transplanting Parallel Robot. Agriculture 2022, 12, 1661. [Google Scholar] [CrossRef]
- Tian, Z.; Ma, W.; Yang, Q.; Yao, S.; Guo, X.; Duan, F. Design and Experiment of Gripper for Greenhouse Plug Seedling Transplanting Based on EDM. Agronomy 2022, 12, 1487. [Google Scholar] [CrossRef]
- Du, X.; Yun, Z.; Jin, X.; Li, P.; Gao, K. Design and Experiment of Automatic Adjustable Transplanting End-Effector Based on Double-Cam. Agriculture 2023, 13, 987. [Google Scholar] [CrossRef]
- Tian, S.; Qiu, L.; Kondo, N.; Yuan, T. Development of Automatic Transplanter for Plug Seedling. IFAC Proc. Vol. 2010, 43, 79–82. [Google Scholar] [CrossRef]
- Vivek, P.; Duraisamy, V.M.; Kavitha, R. Development Of A Gripper For Robotic Picking And Transplanting Operation Of Protray Grown Vegetable Seedlings. Innov. Farming 2019, 4, 097–104. [Google Scholar]
- Li, M.; Jin, X.; Ji, J.; Li, P.; Du, X. Design and Experiment of Intelligent Sorting and Transplanting System for Healthy Vegetable Seedlings. Int. J. Agric. Biol. Eng. 2021, 14, 208–216. [Google Scholar] [CrossRef]
- Mao, H.; Han, L.; Hu, J.; Kumi, F. Development of a Pincette-Type Pick-Up Device for Automatic Transplanting of Greenhouse Seedlings. Appl. Eng. Agric. 2014, 30, 547–556. [Google Scholar] [CrossRef]
- Pei, D.; Meng, F.; Wang, H. Research Progress of Visual Inspection of Tray Seedling and the System of Automatic Transplanting. Int. J. Multimed. Ubiquitous Eng. 2016, 11, 57–68. [Google Scholar] [CrossRef]
- Peng, W.; Xiuhua, Z.; Fukun, H.; Shuo, H.; Maokai, J. Design and Simulation of Taking-Putting Seedling Manipulator of Plug Seedling Transplanter. In Proceedings of the 2021 ASABE Annual International, Virtual Meeting, 12–16 July 2021; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2021. [Google Scholar]
- Tong, J. Health Information Acquisition and Position Calculation of Plug Seedling in Greenhouse Seedling Bed. Comput. Electron. Agric. 2021, 185, 106146. [Google Scholar] [CrossRef]
- Tong, J.; Li, J.B.; Jiang, H.Y. Machine Vision Techniques for the Evaluation of Seedling Quality Based on Leaf Area. Biosyst. Eng. 2013, 115, 369–379. [Google Scholar] [CrossRef]
- Wen, Y.; Zhang, L.; Huang, X.; Yuan, T.; Zhang, J.; Tan, Y.; Feng, Z. Design of and Experiment with Seedling Selection System for Automatic Transplanter for Vegetable Plug Seedlings. Agronomy 2021, 11, 2031. [Google Scholar] [CrossRef]
- Yan, Z.; Zhao, Y.; Luo, W.; Ding, X.; Li, K.; He, Z.; Shi, Y.; Cui, Y. Machine Vision-Based Tomato Plug Tray Missed Seeding Detection and Empty Cell Replanting. Comput. Electron. Agric. 2023, 208, 107800. [Google Scholar] [CrossRef]
- Jin, X.; Tang, L.; Li, R.; Zhao, B.; Ji, J.; Ma, Y. Edge Recognition and Reduced Transplantation Loss of Leafy Vegetable Seedlings with Intel RealsSense D415 Depth Camera. Comput. Electron. Agric. 2022, 198, 107030. [Google Scholar] [CrossRef]
- Jin, X.; Li, R.; Tang, Q.; Wu, J.; Jiang, L.; Wu, C. Low-Damage Transplanting Method for Leafy Vegetable Seedlings Based on Machine Vision. Biosyst. Eng. 2022, 220, 159–171. [Google Scholar] [CrossRef]
- Song, J. Effects of Daily Light Integral and Sowing Density on Seedling Quality of Tomato and Its Energy Consumption analysis. J. Chin. Agric. Mech. 2023, 44, 143. [Google Scholar] [CrossRef]
- Liu, J.; Xiao, Z.; Tan, Y.; Sun, E.; He, B.; Ma, G. A Study on the Optimal Grasping Angle Algorithm for Plug Seedlings Based on Machine Vision. Agronomy 2023, 13, 2253. [Google Scholar] [CrossRef]
- Wang, Y.; Xiao, X.; Liang, X.; Wang, J.; Wu, C.; Xu, J. Plug Hole Positioning and Seedling Shortage Detecting System on Automatic Seedling Supplementing Test-Bed for Vegetable Plug Seedlings. Trans. Chin. Soc. Agric. Eng. 2018, 34, 35–41. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Camera | Robot Manipulator | ||||
|---|---|---|---|---|---|
| Feature | Parameter | Unit | Feature | Parameter | Unit |
| Model | Logi-C270 | - | Model | UR5 | - |
| Type | RGB camera | - | DoF | 6 | - |
| Resolution | 720 P/30 fps | - | Work range | 850 | mm |
| FoV | 60 | ° | Weight | 18.4 | kg |
| Sensor | CMOS | - | Load (kg) | 5 | kg |
| Interface | USB2.0 | - | Pose Repeatability | ±0.1 | mm |
| Feature | Parameter | Unit |
|---|---|---|
| Nursery temperature | 20–26 | °C |
| Nursery humidity | 800–1200 | ppm |
| Air pressure of cylinders | 0.45 | MPa |
| Grasping speed | 0.4 | m/s |
| Lifting speed | 0.2 | m/s |
| Drying temperature | 80 | °C |
| Seedling Age/(Day) | NO. of Trays | Number of Seedlings | Number of Recognition Errors | Recognition Accuracy | Time Cost/(s/Tray) |
|---|---|---|---|---|---|
| 8 | 1 | 72 | 3 | 95.83% | 1.19 |
| 2 | 72 | 1 | 98.61% | 1.27 | |
| 9 | 3 | 72 | 1 | 98.61% | 1.20 |
| 4 | 72 | 2 | 97.22% | 1.20 | |
| 10 | 5 | 72 | 2 | 97.22% | 1.24 |
| 6 | 72 | 1 | 98.61% | 1.23 |
| NO. of Trays | Number of Inferior Seedlings | Number of Successfully Removed Seedlings | Success Rate | Time Cost/(s) |
|---|---|---|---|---|
| 1 | 14 | 14 | 100% | 64.01 |
| 2 | 7 | 7 | 100% | 38.81 |
| 3 | 13 | 13 | 100% | 61.18 |
| 4 | 21 | 21 | 100% | 96.04 |
| NO. of Tests | Number of Inferior Seedlings | Number of Successfully Replanting Seedlings | Success Rate | Time Cost/(s) |
|---|---|---|---|---|
| 1 | 6 | 6 | 100% | 30.55 |
| 2 | 30 | 20 | 66.67% | 152.28 |
| 3 | 22 | 15 | 68.18% | 132.83 |
| 4 | 27 | 16 | 59.26% | 158.62 |
| NO. of Trays | Number of Inferior Seedlings | Number of Successfully Replanting Seedlings | Success Rate | Time Cost/(s) |
|---|---|---|---|---|
| 1 | 20 | 20 | 100% | 127.96 |
| 2 | 20 | 18 | 90% | 128.22 |
| 3 | 20 | 19 | 95% | 128.23 |
| 4 | 20 | 18 | 90% | 129.90 |
| 5 | 20 | 20 | 100% | 128.16 |
| Manufacturer/Model | Advantage | Disadvantage |
|---|---|---|
| TTA/FlexPlanter | Highly efficient and operationally reliable. | Unable to be used for the transplantation of early seedlings in loose substrate. Expensive and space-consuming, it cannot be used in plant factory environments. |
| Flier Systems/Plug Fixer | Highly efficient and operationally reliable. | Dedicated air-assisted seedling removal equipment is required. Expensive and space-consuming, it cannot be used in plant factory environments. |
| Viscon/Fix-O-Mat TIFS-IV | Highly efficient and operationally reliable. | Unable to be used for the transplantation of early seedlings in loose substrate. Expensive and space-consuming, it cannot be used in plant factory environments. |
| Ours | The end effector can grasp loose substrates, is cost-effective, occupies minimal space, and is suitable for use in plant factories. | Single end effector operation is employed, and there is room for further improvement in efficiency. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, W.; Xu, M.; Jiang, H. Design, Integration, and Experiment of Transplanting Robot for Early Plug Tray Seedling in a Plant Factory. AgriEngineering 2024, 6, 678-697. https://doi.org/10.3390/agriengineering6010040
Liu W, Xu M, Jiang H. Design, Integration, and Experiment of Transplanting Robot for Early Plug Tray Seedling in a Plant Factory. AgriEngineering. 2024; 6(1):678-697. https://doi.org/10.3390/agriengineering6010040
Chicago/Turabian StyleLiu, Wei, Minya Xu, and Huanyu Jiang. 2024. "Design, Integration, and Experiment of Transplanting Robot for Early Plug Tray Seedling in a Plant Factory" AgriEngineering 6, no. 1: 678-697. https://doi.org/10.3390/agriengineering6010040
APA StyleLiu, W., Xu, M., & Jiang, H. (2024). Design, Integration, and Experiment of Transplanting Robot for Early Plug Tray Seedling in a Plant Factory. AgriEngineering, 6(1), 678-697. https://doi.org/10.3390/agriengineering6010040