Abstract
The aim of this note is to provide a quick overview of the installation and adjustment of an exclusively mechanical standalone automatic device that self-adjusts to weather changes to control the frequency and duration of the irrigation. The “hydraulic evapotranspiration multisensor” (HEM) is composed of a reduced evaporation pan with water, a magnet with a floater floating in the pan, a hydraulic device operated by a magnetic hydraulic valve that has the ability to adjust the frequency of irrigation, and a hydraulic system that returns water to the pan during each irrigation event through an adjustable dripper to replace the water lost due to the fact of evaporation. This note is particularly relevant for arid–semi-arid regions where agricultural production is fully dependent on irrigation.
1. Introduction
In the process of evaluating the effects of atmospheric conditions on water consumption in irrigation scheduling, experiments are needed to investigate the hydrological cycle of evapotranspiration (ET) across varying field conditions. One model that adequately describes these processes is surely the Penman–Monteith equation, which concerns the influence of different climatic variables (e.g., air temperature and humidity, solar radiation, and wind velocity) [1,2]. Different models have been used for irrigation control in open-field and protected types of cultivation based on the original evapotranspiration equation by Penman–Monteith. However, when using such models, it is difficult to measure variables, including the canopy and aerodynamic resistance of crop surfaces [3]. Additionally, the model equation’s coefficients must first be calibrated for the specific crop under the prevailing climatic conditions. Alternatively, the optimal approaches to irrigation control may include plant stress sensing as opposed to climate or substrate irrigation-based approaches. Nowadays, companies that manufacture irrigation systems have released weather-sensitive irrigation regulators on the market that sense the weather constituents affecting ET. Readings from said sensors are fed into computer models to assess ET using intelligent decision algorithms that modify the irrigation schedule, which is set for normal weather conditions. For deviations from a normal to lower ET rate, these models increase the time interval between consecutive irrigation cycles to avoid excessive irrigation. Thus, companies claim up to 30% water savings [4].
An enabler of precision irrigation system is the adaptation of Internet of Things applications [5]. IoT bridges the gap between the physical and cyber worlds through the integration of sensor-based information, data communication, data cloud or fog-computing acquisition, and intelligent processing in real time [6]. Artificial neural network-based models for estimating evaporation were proposed in [2], which took into account climatic parameters. Along this line, other authors have indicated that the water requirements for several crops can be sufficiently modeled for the considered climate based on virtual sensors and fuzzy logic control systems [7,8]. Li et al. [9] proposed a composite irrigation controller that considers predictive algorithms, crop coefficients, fuzzy algorithms, and sliding mode control methods for maize irrigation scheduling.
Estimating ET from climate variables, however, can be a difficult task for farmers, who may not be familiar with the use of complex hydrological and energy models. Because most of the Earth’s irrigated lands are located in developing countries, where climatological data are often incomplete and inaccurate, it is thus important to use the cheapest, simplest, and most practical monitoring method to improve efficiency in irrigation [10].
Commonly used timer-based controllers (i.e., no feedback irrigation decision support system) apply excess water in weather conditions when irrigation is not necessary. For example, along the central coast of California, open-loop control irrigation systems apply more than 200% of the actual evapotranspiration requirements of vegetables through sprinklers’ irrigation systems [11].
In arid and semi-arid regions, the need for water management at the farm level is of high importance due to the fact of a rainfall deficit, which calls for crop irrigation during most of the growing season. Under these conditions, dry farming productivity is very low and restricted to a few drought-resistant species, as the rainfall varies from year to year and its occurrence is unpredictable. However, the adoption of micro-irrigation techniques, such as drip irrigation and sprinkler irrigation, the adaptation of planting dates, the selection of drought-resistant varieties, and the use of mulch-based cultivation techniques would be beneficial for improving water-use efficiency and conserving water resources [12,13]. The number of irrigation events required for optimal yields of the main irrigated crops are estimated to be between eight and fifty-eight (e.g., in Cyprus), with a total amount of irrigation water applied being between 355 mm (e.g., vegetable crops) and 2400 mm (e.g., Colocasia crops) from April to October [13]. Since there are so many applications of water, the strategic timing of irrigation events is critical. Cyprus’ water resources depend entirely on rainfall, and Cyprus is expected to experience the most adverse climate change effects of any Eastern Mediterranean country, including changes in precipitation and increases in temperature [14]. Important waterworks that store river water were constructed approximately 60 years ago, and this was a multiannual operation. The optimum capacity was provided using mathematical models based on the rainfall records that were available at the time. Around the 1990s, it was realized that the amount of water stored in the dam was less than expected. An analysis of the rainfall records up to 1993 revealed that the rainfall values used to calibrate the model, which were prior to the dam’s construction, were too high. A graphical presentation of the yearly rainfall record for Cyprus in the hydrological year 1900–1901 revealed a steady rainfall decrease in the 30-year moving average. This decrease persists up to today at a rate of approximately 1.1 mm y−1. This decrease in rainfall since the construction of Cyprus’ most important dam until today is approximately 13%, which means a run-off reduction of approximately 40% [15].
In Cyprus, approximately 70% of the amount used for irrigated agriculture is freshwater, and every effort must be made to reduce the waste of irrigation water through promoting low-cost means and practices that simple farmers can afford, understand, and accept. So, a novel, environmentally friendly system that does not require software, electricity and batteries, or weathermatic and that both saves irrigation water and protects plantations from water deficit stress is the proposed hydraulic evapotranspiration multisensor system. Its installation and adjustments are explained in this paper [15].
Class A evaporation pans (i.e., large open, circular containers that are 120.7 cm in diameter and 25.4 cm deep, filled with water) have been used around the world as a ready source of evaporation data. Several individuals have used this method because of their simplicity and low cost to estimate ET and irrigation scheduling, as it may still be the most practical and accurate meteorological method [10,16,17]. Their simplicity and high degree of adaptation at the farm level, which are characteristics of the evaporation pan, seem to be the primary reason for the pan’s expansion among producers. The work of Thomson and Fisher (2006) [9], who designed an evaporimeter based on a washtub for easy cotton irrigation scheduling, is relevant. Similarly, other researchers have proposed activating a drip irrigation system based on a water level sensing system in a mini-pan [18]. Additionally, field devices that integrate environmental effects and measure evaporation such as atmometers can also be used to schedule irrigation [19,20].
The “hydraulic evapotranspiration multisensor” (HEM) product’s design and operation, as an exclusively mechanical standalone automatic device for irrigation scheduling, is described in detail in [21]. The novelty of an HEM lies in its integrated approach to irrigation scheduling, which considers only the energy obtained from piped water by monitoring water evaporation in the pan. It is composed of a reduced evaporation pan, a magnet with a floater floating in the pan, a hydraulic device operating with a magnetic hydraulic valve with the ability to adjust the frequency of irrigation, and a hydraulic system that returns water to the pan through a dripper to replace the water lost due to the fact of evaporation. The information in this note is aimed at providing a quick overview of the HEM’s installation and adjustment. During the installation of the HEM, the frequency and duration of the irrigation were considered the crop water requirements, which were calculated using the classical pan A method, with a statistically correct water volume (Cv), under average weather conditions for each month at different topographical elevations.
2. Installation
The HEM prototype (Figure 1) was installed at an inland, semi-arid location in southern Cyprus, near the (1) water supply pipe of a pressurized irrigation system in which a pressure controller was set to reduce the pressure to 2 Bar from 4.5 Bar (i.e., drip irrigation system pressure requirements). On an outlet from this pipe, a common solenoid irrigation valve transformed into a (2) hydraulic irrigation valve was installed after a (3) faucet, which, for the moment, was closed. Τhe location of the installation was selected to ensure uninterrupted sunshine with no barriers that would block the flow of wind in order to sense the changes in the all-weather constituents in holistic way. A vertical angle (4) iron pole was driven into the ground at the upper end of which a fixture supported a (5) magnetic hydraulic valve with the (6) stem in the vertical position. This was inserted in the base (7) pipe of the (8) evaporation pan, which was placed in a horizontal position without water. Then, the (10) floater was left to slide down gently on the base pipe until it was stopped by the (9) ring screw. Slightly before, a click noise was heard, which meant that the magnet reached the correct level to raise the (11) magnetic rod, opening the magnetic hydraulic valve. No adjustment with the ring screw was necessary. The next step was to connect a small pipe to the (12) inlet of the said valve and to the chamber of the (13) hydraulic irrigation valve in order to be controlled by the HEM. When the magnetic hydraulic valve is closed, the water in the said chamber is kept under pressure, and the hydraulic irrigation valve is closed. The (14) outlet of the magnetic hydraulic valve was connected with a small pipe to run the escaping water to the irrigation line through the (15) adaptor, which replaced the solenoid of the transformed solenoid irrigation valve. To the said outlet, one end of the (16) water return pipe was connected to the transfer part of the water escaping towards the evaporation pan. At the other end, an (17) adjustable dripper was connected, fixed at the edge of the pan, returning the water lost by evaporation, and resetting the system. At this stage, by removing the floater, the (11) magnetic rod dropped keeping the magnetic hydraulic valve closed. The faucet was opened, filling the (13) chamber of the hydraulic irrigation valve and the (6) stem of the magnetic hydraulic valve with water under pressure that kept the hydraulic irrigation valve closed. At this stage, the (18) frequency screw was set at an intermediate indication, and the floater was replaced, opening both the magnetic and irrigation valves. The water was released for irrigation, and from the fully opened adjustable dripper water started flowing in the evaporation pan with its level quickly raised. To complete the installation, the irrigation frequency was adjusted with the frequency screw and the watering duration also through the adjustable dripper, as explained below.
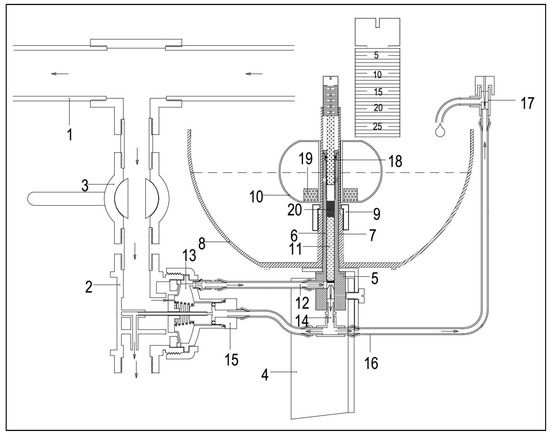
Figure 1.
Details of the HEM prototype: (1) pressurized irrigation system; (2) hydraulic irrigation valve; (3) faucet; (4) iron pole; (5) fixture supporting the magnetic hydraulic valve; (6) stem of the magnetic hydraulic valve; (7) base pipe fixed perpendicularly at the base of the evaporation pan; (8) evaporation pan; (9) ring screw to stop the floater at the right level; (10) ring screw; (11) magnetic rod; (12) small pipe; (13) chamber of the valve; (14) outlet of the magnetic hydraulic valve; (15) adaptor replacing the solenoid; (16) water return pipe; (17) adjustable dripper; (18) frequency screw; (19) permanent magnet; (20) magnetic component of the rod [22].
3. Setting the Time Interval
The hydraulic evapotranspiration multisensor (HEM) has one sensor to assess, in a holistic way, the changes in the all-weather components affecting evapotranspiration. This is accomplished by monitoring the water evaporation rate in the evaporation pan, as shown in Figure 1, with a floater that floats in the water of the pan, moving in a vertical direction following a drop in the water level because of evaporation. The rate of this drop defines the time interval between the consecutive irrigation cycles. In evapotranspiration formulas, the readings from a Class A evaporation pan are important components. An electronic-based, weighable reduced pan A evaporimeter (i.e., RS-EVA-N01-2; Shandong Renke Control Technology Co., Ltd.; Jinan City; China) for the automatic monitoring of the evaporation process was installed, based on the manufacturer’s instructions, for correlation purposes of the pan readings with those of the HEM pan readings. To make the HEM readings easy and accurate, an external tube that graduated in mm, which was a floating object with a flat upper surface, as the reference line was installed. This tube was connected to the HEM’s evaporation pan (Figure 2). The per day water level drop rate of the pan, because of evaporation, was expected to be analogous with that of the Class A evaporation pan but less because the open water area in the multisensor pan was partly covered by the floater. The drop in mm of the water level in the multisensor pan per day, Dday, was (Equation (1)):
where Eca is the per day evaporation in the Class A evaporation pan in mm, Ap is the cross-sectional area of the evaporation pan, and Af is that of the floater at the water level in cm2.

Figure 2.
External tube connected to the HEM prototype for use as a water evaporated (mm) metering device.
Equation (1) can be regarded as an empirical equation. The correct volume of evaporated water in the HEM (mm) can be obtained by regressing the measured evaporation in the Class A evaporation pan against that measured in the HEM. The potential evapotranspiration (i.e., ETO, the capacity of the atmosphere to remove water from a surface over a specified region with an unlimited water supply through plant transpiration and evaporation) and water evaporation from pans are governed by the same climatic factors. Consequently, a strong correlation between them exists.
However, as plant surfaces react differently to the prevailing climatic conditions, it is necessary to establish experimentally the relationship between the potential evapotranspiration and pan evaporation. The relationship also depends on the size, shape, and exposure of the pan (i.e., pan coefficient KP; ETO = KP × Eca) with a high degree of accuracy concerning the wind speed and relative humidity. If the pan calibration is to be extrapolated to other sites, it is necessary to standardize the type of the pan and its exposure. Ertek [23] suggested that the proper use of the pan coefficient and its calibration are relevant.
The linear regression analysis that was developed considers the water evaporation rate from the HEM (E HEM, mm) as a predictor and the water evaporation rate from the reduced A pan evaporimeter (E reduce pan, mm) as the dependent variable (Figure 3). For a specific time period, the mean values of the E HEM (mm) was shown to be a significant predictor for the E reduce pan (mm), with a coefficient of determination of r2 = 0.98.
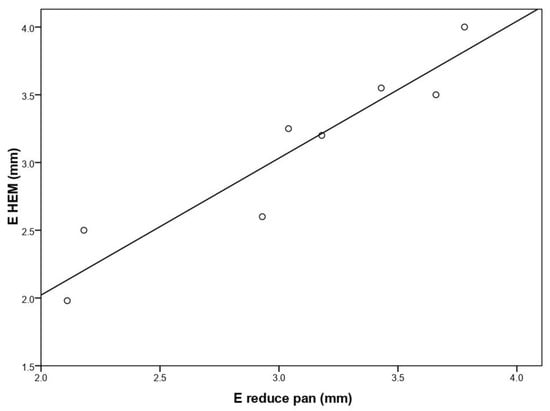
Figure 3.
Linear regression modeling between evaporation (mm) measured with the HEM and the reduced pan.
As with other automatic irrigation regulators, an original irrigation schedule was set for delivery over a month or season and for the correct water volume for the statistically expected average weather conditions by setting the irrigation time interval (Ti) in days and in combination with the watering time (Wt) and the installation’s watering capacity. A one-day time interval was required for the water level in the evaporation pan to drop (Dday) in mm over a normal day. The frequency screw with graduations in mm was turned to set the preferred time interval in days at the indication on the screw (Is) in mm:
where Dday is the per normal day drop in the water level in mm; Ti is the wished time interval in days; Sm is the sensitivity of the regulator in mm, which is the necessary rise in the water level in mm to push the floater up to overcome the force of the magnet holding the magnetic rod to let it drop and terminate the irrigation. Sm is usually 2 to 4 mm, depending on the magnetic force and the floater’s diameter.
The common timer regulators kept the time interval between all irrigation cycles and watering duration as set in the schedule. For the hydraulic evapotranspiration multisensor, the time interval was the time required for the water surface and, thus, the floater to be lowered from the high level, at which the irrigation was terminated, to the low level, at which the magnet raised the rod to start the irrigation, changing with the evaporation rate. This time period was increased for low evaporation and evapotranspiration rates to save water, and it was diminished at high rates to protect plantations.
4. Setting Watering Time
The watering time (Wt) for the hydraulic evapotranspiration multisensor is the length of time to return the amount of water required to replace that lost from the evaporation pan due to the fact of evaporation in order to increase the level from when the irrigation started to that when the irrigation is terminated. During this time, part of the water that escapes from the outlet of the magnetic hydraulic valve with the return water is replaced, obtained from the irrigation line or another suitable place. It is directed through the adjustable dripper towards the evaporation pan. The flow of the return water is set to a low flow rate (Rr) in order for the watering time (Wt) to last as long as necessary and to provide the correct water volume to plantations, in consideration with the irrigation frequency (Ti) and watering capacity of the network. The same parameters, in days, for the frequency and watering duration, in minutes or hours, are set by the farmers on the automatic irrigation timers, either from their own experience or after scientific advice. The difference with timers is that at every irrigation cycle, the correct water volume for the season remains constant, while in HEM an original irrigation schedule is prepared to meet the watering needs for the statistically averaged weather, but in reality, this deviates from the normal schedule, according to weather deviations. The effect of water evaporation rate on the time interval between consecutive irrigation cycles, or frequency was previously indicated, in connection to some construction details of every particular apparatus. The watering duration (Wt), in minutes, at a steady water supply pressure remains the same for irrigation cycles, as set in the original irrigation schedule. This depends on the flow rate of the return water (Rr), in ml min−1; the area open to evaporation of the water level of the evaporation pan (Ap)m, in cm2; normal day water level drop (Dday), in cm; and frequency (Fd) in days. These are connected in the following formula:
In case the return rate is set through an adjustable dripper, adjustments are repeated until measurements, using a timer and a volumetric tube, result in the correct value, as given by the follow formula:
5. Adjustments in a Pilot Plot
The plantation on which the hydraulic evapotranspiration multisensor prototype was installed for irrigation is an existing one with a variety of trees scheduled to be irrigated over the hot season at 2-day intervals with a watering duration of a half an hour. To continue using the same irrigation practice as the original, an irrigation schedule was prepared. The decisive factor controlling the irrigation frequency of the HEM was the evaporation rate, from which the time depended on the water level in the evaporation pan, which decreased or increased, resulting in the termination or start of the irrigation. This drop depends also on the number of days set between the irrigation cycles, certain dimensions of the multisensor components affecting the water volume, and the sensitivity of the equipment. The dimensions of the particular equipment: evaporation pan, ΦP = 232 mm; floater, ΦF = 120 mm. The sensitivity was approximately 3 mm. Sensitivity was the increase in the water level of the pan required for the floater to push the magnet up, overcoming the magnetic force holding the magnetic rod, releasing and dropping to close the magnetic hydraulic valve. This depended on the size of the magnetic component of the rod, strength of the magnet, and size of the floater.
As the original irrigation schedule was prepared for average weather conditions, the highest average daily value of evaporation recorded in a Class A evaporation pan in Cyprus was 9 mm, which was for the hottest month, and this value was used as a guide. However, it was expected that the corresponding drop in the water level in the evaporation pan would be less, because part of the area of the pan was covered by the floater, and the pan was not filled up to the edge. The daily drop in the water level accepted in this case was 7 mm, considering Equation (1) and several comparisons between the water evaporation measured with the HEM and the potential evapotranspiration calculated with the Penman–Monteith equation based onsite climatic data, as mentioned in [12].
So, for this hydraulic evapotranspiration multisensor prototype, the frequency screw was set at a graduation (upper end of the Screw) for a two-day frequency reading 11 mm, 14 mm, as expected for two average days in the hot season, and less than 3 mm for the sensitivity.
The watering duration is defined by the flow rate at which water returns from the irrigation line to the evaporation pan to replace that lost by evaporation and to reset the HEM. This volume, in mL, is the product of the water surface area, in cm2; the expected daily water level drop, in cm; and the frequency, in number of days, which in this case was 423 × 0.7 × 2 = 592 mL (this volume in mL is the product of the water surface area, in cm2; expected daily water level drop, in cm; and frequency, in number of days). This calculated volume had to be replaced in 30 min, which was covered at a rate of 19.74 mL min−1. The adjustable dripper flow for the return water was set at 20 mL min−1. The flow rate measurements were carried out using a volumetric tube and a timer.
6. Further Application to Vegetables Crops
Two tables with estimated return rate values for spring and autumn potato plantations in a coastal semi-arid location of southern Cyprus (lat. 35°1’50 N, long. 33°46’17 E, and altitude 20 m, m.s.l) are presented as examples, with the hydraulic evapotranspiration multisensor prototype having Ap = 422.5 cm2 and Af = 113 cm2, considering average Eca values from the two nearest Class A evaporation pans in the area (Table 1 and Table 2).

Table 1.
Water return rate (Rr, mL min−1) for various watering times and frequencies.
Table 2.
Water return rate (Rr, mL min−1) for various watering times and frequencies.
The spring potato season is March–May, and the watering requirements is a total of 300 m3 1000 m−2 [6], the irrigation installations delivers 10 m3 h−1, and the average Eca for the season is 4.5 mm day−1. For this case, Dday 0.35 cm day−1 was considered (Table 1).
To achieve 300 m3 for the season at 10 m3 h−1, a 3-day frequency screw, and a 1 h watering duration, the return rate (Rr) must be adjusted to 7.4 mL min−1. With the frequency screw set at 4 day intervals and 1 h irrigation durations, the adjustable screw was set for a return rate at 9.8 mL min−1. The reduced irrigation events at 22.5 imposed an increase of the installations’ capacity to 13.3 m3 h−1. Alternatively, with 10 m3 h−1, the installations capacity of the adjustable screw was set at a 7.5 mL min−1 return rate.
The autumn potato season is from July to November, and the watering requirements are a total of 502 m3 1000 m−2 [6]. The irrigation installations delivered 10 m3 h−1 and the average Eca for the season was 5.8 mm day−1. The Dday for this apparatus was taken as 0.43 cm day−1 (Table 2).
To achieve 500 m3 for the season at 10 m3 h−1, a 3-day frequency screw, and a 1 h watering duration, the return rate (Rr) had to be adjusted to 9 mL min−1. With the frequency screw set at 4-day intervals and 1 h irrigation durations, the irrigation events were reduced to 37.5, the installation’s capacity increased to 13.3 m3 h−1, and the adjustable screw was set for a return rate of 12 mL min−1. Alternatively, with 10 m3 h−1, the installation’s capacity of the adjustable screw was set at a 16 mL min−1 return rate.
7. Conclusions
Irrigation agriculture consumes the largest proportion of water diverted for various uses in semi-arid areas of the world. In response, farmers must manage their water more effectively, and this requires the incorporation of irrigation scheduling techniques into their standard management practices. Irrigation scheduling may require farm managers to make decisions as frequently as daily for the crop production system. One of the essential elements of an irrigation scheduling program is the availability of climatic data. However, in many locations, the complete datasets of meteorological variables required are not available. A hydraulic evapotranspiration multisensor (HΕΜ) prototype for the on-farm monitoring of evaporated water was developed and used in a pilot plot. Continual access to the effects of climatic parameters on water evaporated will allow a farmer to better manage his irrigation scheduling system. The HΕΜ senses changes in the weather constituents (e.g., rainfall, temperature, humidity, wind velocity, and sunshine) in a holistic way, thus more efficiently, and it is applicable where drip or sprinkler irrigation is practiced, no matter whether electric power is available. This product meets the criteria for farmers’ acceptance, as it easy to install and maintain, and it requires minimal record keeping and evaluation. The configuration, operation, and use of this device will undoubtedly be refined and improved as more farmers use and depend on it.
Author Contributions
Conceptualization, D.K.; methodology, D.K.; writing—original draft preparation, G.N., D.N., D.K. and E.E.; writing—review and editing, G.N., D.N. and E.E.; visualization, D.K., D.N. and G.N.; supervision, E.E. and G.N.; All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Lovelli, S.; Perniola, M.; Arcieri, M.; Rivelli, R.; Di Tommaso, T. Water use assessment in muskmelon by the Penman-Monteith ‘one-step’ approach. Agric. Water Manag. 2008, 95, 1153–1160. [Google Scholar] [CrossRef]
- Kumar, N.; Upadhyay, G.; Kumar, P. Comparative Performance of Multiple Linear Regression and Artificial Neural Network Based Models in Estimation of Evaporation. Adv. Res. 2017, 11, 1–11. [Google Scholar] [CrossRef]
- Fernández, M.D.; Bonachela, S.; Orgaz, F.; Thompson, R.; López, J.C.; Granados, M.R.; Gallardo, M.; Fereres, E. Measurement and estimation of plastic greenhouse reference evapotranspiration in a Mediterranean climate. Irrig. Sci. 2010, 28, 497–509. [Google Scholar] [CrossRef]
- Al-Ghobari, H.M.; Mohammad, F.S.; El Marazky, M.S.A. Evaluating two irrigation controllers under subsurface drip irrigated tomato crop. Span. J. Agric. Res. 2016, 14, 4. [Google Scholar] [CrossRef]
- Jha, K.; Doshi, A.; Patel, P.; Shah, M. A comprehensive review on automation in agriculture using artificial intelligence. Artif. Intell. Agric. 2019, 2, 1–12. [Google Scholar] [CrossRef]
- Zamora-Izquierdo, M.A.; Santa, J.; Martínez, J.A.; Martínez, V.; Skarmeta, A.F. Smart Farming IoT Platform Based on Edge and Cloud Computing. Biosyst. Eng. 2019, 177, 4–17. [Google Scholar] [CrossRef]
- Ben Ali, R.; Bouadila, S.; Mami, A. Development of a Fuzzy Logic Controller applied to an agricultural greenhouse experimentally validated. Appl. Therm. Eng. 2018, 141, 798–810. [Google Scholar] [CrossRef]
- Pérez-Castro, A.; Sánchez-Molina, J.A.; Castilla, M.; Sánchez-Moreno, J.; Moreno-Úbedac, J.C.; Magán, J.J. FertigUAL: A fertigation management app for greenhouse vegetable crops. Agric. Water Manag. 2017, 183, 186–193. [Google Scholar] [CrossRef]
- Li, X.; Li, Z.; Xie, D.; Wang, M.; Zhou, G.; Chen, L. Design of Farm Irrigation Control System Based on the Composite Controller. Actuators 2023, 12, 81. [Google Scholar] [CrossRef]
- Stanhill, G. Is the class A evaporation pan still the most practical and accurate meteorological method for determining irrigation water requirements? Agric. For. Meteorol. 2002, 112, 233–236. [Google Scholar] [CrossRef]
- Smith, R.; Cahn, M.; Hartz, T.; Love, P.; Farrara, B. Nitrogen Dynamics of Cole Crop Production: Implications for Fertility Management and Environmental Protection. HortScience 2016, 51, 1586–1591. [Google Scholar] [CrossRef]
- Kumar, N.; Upadhyay, G.; Choudhary, S.; Patel, B.; Chhokar, R.S.; Gill, S.C. Resource conserving mechanization technologies for dryland agriculture. In Enhancing Resilience of Dryland Agriculture Under Changing Climate: Interdisciplinary and Convergence Approaches; Springer Nature Singapore: Singapore, 2023; pp. 657–688. [Google Scholar]
- Nikolaou, G.; Neocleous, D.; Christou, A.; Kitta, E.; Katsoulas, N. Implementing Sustainable Irrigation in Water-Scarce Regions under the Impact of Climate Change. Agronomy 2020, 10, 1120. [Google Scholar] [CrossRef]
- Zachariadis, T. Springer Briefs in Environmental Science. In Climate Change in Cyprus, Review ofthe Impacts and Outline ofan Adaptation Strategy; Springer International Publishing: Cham, Switzerland, 2016. [Google Scholar]
- Kypris, D. Cyclic Climatic Changes in Cyprus as Evidenced from Historic Documents and One Century’s Rainfall Records. In Diachronic Climatic Impacts on Water Resources, with Emphasis on Mediterranean Region; Angelakis, A.N., Issar, A.S., Eds.; NATO ASI Series 1; Global Environmental Change; Volume 36, pp. 111–128. Available online: https://link.springer.com/chapter/10.1007/978-3-642-61084-4_6 (accessed on 20 March 2023).
- Rameshwaran, P.; Tepe, A.; Yazar, A.; Ragab, R. Effects of drip-irrigation regimes with saline water on pepper productivity and soil salinity under greenhouse conditions. Sci. Hortic. 2015, 199, 114–123. [Google Scholar] [CrossRef]
- Nikolaou, G.; Neocleous, D.; Katsoulas, N.; Kittas, C. Irrigation of greenhouse crops. Horticulturae 2019, 5, 7. [Google Scholar] [CrossRef]
- Yıldırım, M. Drip irrigation automation with a water level sensing system in a greenhouse. J. Anim. Plant Sci. 2016, 26, 131–138. [Google Scholar]
- Thomson, S.J.; Fisher, D.K. Calibration and use of the UGA EASY evaporation pan for low frequency sprinkler irrigation of cotton in a clay soil. J. Cotton Sci. 2006, 10, 210–223. [Google Scholar]
- Schiattone, M.I.; Viggiani, R.; Di Venereb, D.; Sergiob, L.; Cantore, V.; Todorovic, M.; Perniola, M.; Candido, V. Impact of irrigation regime and nitrogen rate on yield, quality and water use efficiency of wild rocket under greenhouse conditions. Sci. Hortic. 2018, 229, 182–192. [Google Scholar] [CrossRef]
- Kypris, D.; Nikolaou, G.; Evangellides, E.; Neocleous, D. A Hydraulic Evapotranspiration Multisensor. Agriengineering 2022, 4, 1164–1170. [Google Scholar] [CrossRef]
- Kypris, D.C. Automatic Irrigation Regulator Controlled by Water Evaporation. Patent No 4,967,789, 6 November 1990. [Google Scholar]
- Ertek, A. Importance of pan evaporation for irrigation scheduling and proper use of crop-pan coefficient (Kcp), crop coefficient (Kc) and pan coefficient (Kp). Afr. J. Agric. Res. 2011, 6, 6706–6718. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).