
Assessment of Laser Scanner Use under Different Settings in Two Differently Managed Vineyards for Estimating Pruning Wood Parameters


 ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
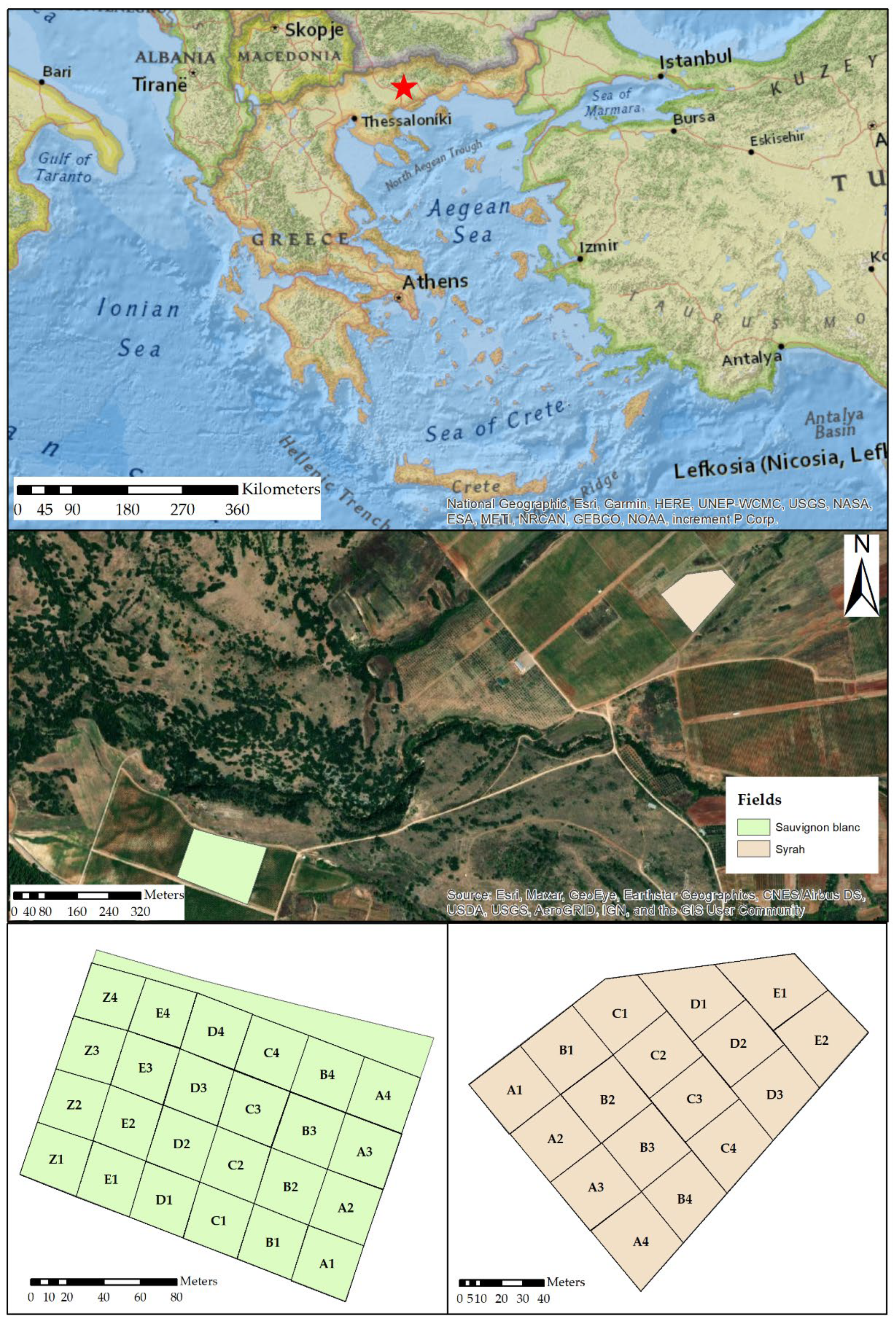
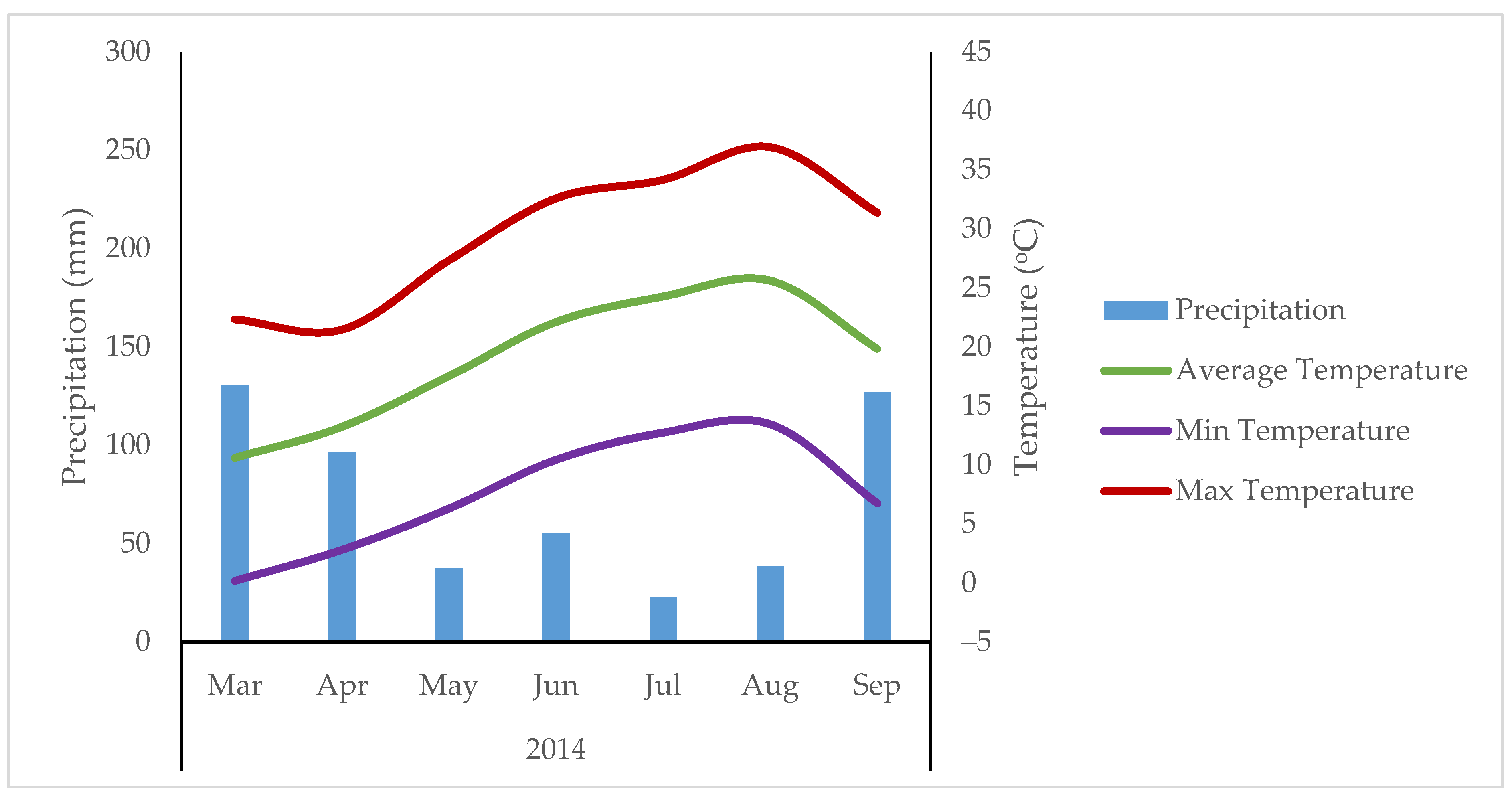
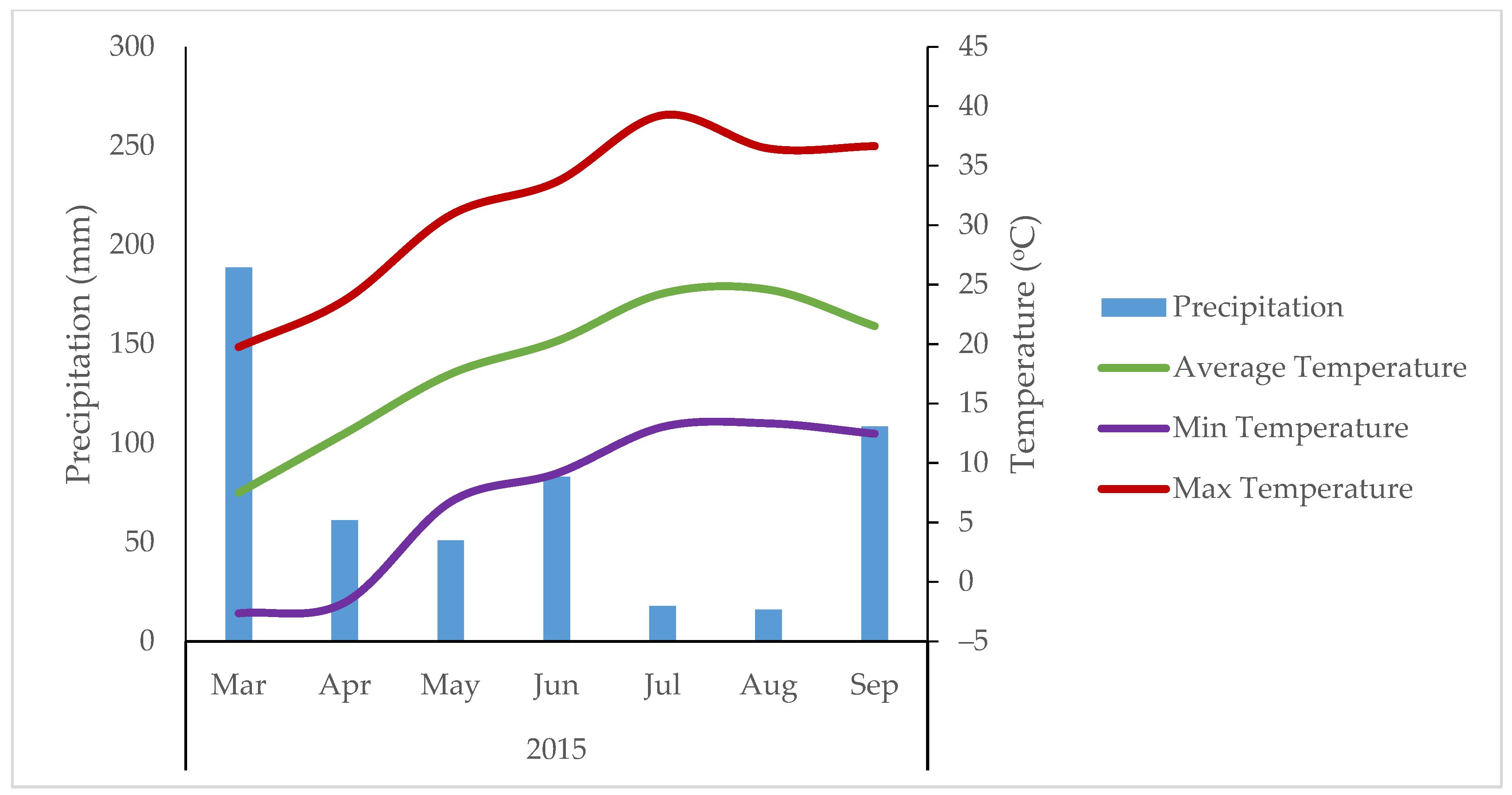
2.1. Experimental Fields
2.2. Field Measurements
2.3. Statistical Analysis
3. Results
3.1. Sauvignon Blanc Vineyard
3.1.1. Descriptive Statistics
3.1.2. Pearson’s Correlation
3.1.3. Linear Regression Models
3.2. Syrah Vineyard
3.2.1. Descriptive Statistics
3.2.2. Pearson’s Correlation
3.2.3. Linear Regression Models
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Arnó, J.; Martínez Casasnovas, J.A.; Ribes Dasi, M.; Rosell, J.R. Review. Precision Viticulture. Research Topics, Challenges and Opportunities in Site-Specific Vineyard Management. Span. J. Agric. Res. 2009, 7, 779. [Google Scholar] [CrossRef] [Green Version]
- Bramley, R.; Pearse, B.; Chamberlain, P. Being Profitable Precisely—A Case Study of Precision Viticulture from Margaret River. Australian and New Zealand Grapegrower and Winemaker [Annual Technical Issue]. CSIRO Res. Pub. Reposit. 2003, 473a, 84–87. [Google Scholar]
- Kitchen, N.R.; Sudduth, K.A.; Myers, D.B.; Drummond, S.T.; Hong, S.Y. Delineating Productivity Zones on Claypan Soil Fields Using Apparent Soil Electrical Conductivity. Comput. Electron. Agric. 2005, 46, 285–308. [Google Scholar] [CrossRef]
- Zarco-Tejada, P.J.; González-Dugo, V.; Berni, J.A.J. Fluorescence, Temperature and Narrow-Band Indices Acquired from a UAV Platform for Water Stress Detection Using a Micro-Hyperspectral Imager and a Thermal Camera. Remote Sens. Environ. 2012, 117, 322–337. [Google Scholar] [CrossRef]
- Zhong, Z.; Sun, H.; Li, M.; Zhang, F.; Li, X. Development of a Vehicle-Mounted Crop Detection System. J. Integr. Agric. 2014, 13, 1284–1292. [Google Scholar] [CrossRef]
- Nandibewoor, A.; Hebbal, S.B.; Hegadi, R. Remote Monitoring of Maize Crop through Satellite Multispectral Imagery. Procedia Comput. Sci. 2015, 45, 344–353. [Google Scholar] [CrossRef] [Green Version]
- Anastasiou, E.; Balafoutis, A.; Darra, N.; Psiroukis, V.; Biniari, A.; Xanthopoulos, G.; Fosuntas, S. Satellite and Proximal Sensing to Estimate the Yield and Quality of Table Grapes. Agriculture 2018, 8, 94. [Google Scholar] [CrossRef] [Green Version]
- Paulus, S.; Schumann, H.; Kuhlmann, H.; Léon, J. High-Precision Laser Scanning System for Capturing 3D Plant Architecture and Analysing Growth of Cereal Plants. Biosyst. Eng. 2014, 121, 1–11. [Google Scholar] [CrossRef]
- Sanz, R.; Rosell, J.R.; Llorens, J.; Gil, E.; Planas, S. Relationship between Tree Row LIDAR-Volume and Leaf Area Density for Fruit Orchards and Vineyards Obtained with a LIDAR 3D Dynamic Measurement System. Agric. For. Meteorol. 2013, 171–172, 153–162. [Google Scholar] [CrossRef] [Green Version]
- Tsoulias, N.; Paraforos, D.S.; Fountas, S.; Zude-Sasse, M. Estimating Canopy Parameters Based on the Stem Position in Apple Trees Using a 2D LiDAR. Agronomy 2019, 9, 740. [Google Scholar] [CrossRef] [Green Version]
- Chatzinikos, A.; Gemtos, T.A.; Fountas, S. The Use of a Laser Scanner for Measuring Crop Properties in Three Different Crops in Central Greece. In Proceedings of the Precision Agriculture ’13, Lleida, Spain, 7–11 July 2013; Stafford, J.V., Ed.; Academic Publishers: Wageningen, The Netherlands, 2013; pp. 129–136. [Google Scholar]
- Llorens, J.; Gil, E.; Llop, J.; Queraltó, M. Georeferenced LiDAR 3D Vine Plantation Map Generation. Sensors 2011, 11, 6237–6256. [Google Scholar] [CrossRef]
- Tagarakis, A.C.; Koundouras, S.; Fountas, S.; Gemtos, T. Evaluation of the Use of LIDAR Laser Scanner to Map Pruning Wood in Vineyards and Its Potential for Management Zones Delineation. Precis. Agric. 2018, 19, 334–347. [Google Scholar] [CrossRef]
- Siebers, M.H.; Edwards, E.J.; Jimenez-Berni, J.A.; Thomas, M.R.; Salim, M.; Walker, R.R. Fast Phenomics in Vineyards: Development of GRover, the Grapevine Rover, and LiDAR for Assessing Grapevine Traits in the Field. Sensors 2018, 18, 2924. [Google Scholar] [CrossRef] [Green Version]
- Grocholsky, B.; Nuske, S.; Aasted, M.; Achar, S.; Bates, T. A Camera and Laser System for Automatic Vine Balance Assessment. In Proceedings of the American Society of Agricultural and Biological Engineers (ASABE) Annual International Meeting, Louisville, KY, USA, 1 July 2011; Volume 7. [Google Scholar]
- Fountas, S.; Anastasiou, E.; Balafoutis, A.; Koundouras, S.; Theoharis, S.; Theodorou, N. The Influence of Vine Variety and Vineyard Management on the Effectiveness of Canopy Sensors to Predict Winegrape Yield and Quality. In Proceedings of the International Conference of Agricultural Engineering, Zurich, Switzerland, 6–10 July 2014. [Google Scholar]
- Anastasiou, E.; Castrignanò, A.; Arvanitis, K.; Fountas, S. A Multi-Source Data Fusion Approach to Assess Spatial-Temporal Variability and Delineate Homogeneous Zones: A Use Case in a Table Grape Vineyard in Greece. Sci. Total Environ. 2019, 684, 155–163. [Google Scholar] [CrossRef] [PubMed]
- Gutiérrez-Gamboa, G.; Díaz-Galvéz, I.; Verdugo-Vásquez, N.; Moreno-Simunovic, Y. Leaf-to-Fruit Ratios in Vitis Vinifera L. Cv. “Sauvignon Blanc”, “Carmenère”, “Cabernet Sauvignon”, and “Syrah” Growing in Maule Valley (Chile): Influence on Yield and Fruit Composition. Agriculture 2019, 9, 176. [Google Scholar] [CrossRef] [Green Version]
- Current Weather and Forecast—OpenWeatherMap. Available online: https://openweathermap.org/ (accessed on 17 February 2022).
- Balint, G.; Reynolds, A.G. Effect of Different Irrigation Strategies on Vine Physiology, Yield, Grape Composition and Sensory Profiles of Vitis Vinifera L. Cabernet-Sauvignon in a Cool Climate Area. OENO One 2014, 48, 269–292. [Google Scholar] [CrossRef]
- Cabral, I.L.; Carneiro, A.; Nogueira, T.; Queiroz, J. Regulated Deficit Irrigation and Its Effects on Yield and Quality of Vitis Vinifera L., Touriga Francesa in a Hot Climate Area (Douro Region, Portugal). Agriculture 2021, 11, 774. [Google Scholar] [CrossRef]
- Caruso, G.; Palai, G.; Gucci, R.; D’Onofrio, C. The Effect of Regulated Deficit Irrigation on Growth, Yield, and Berry Quality of Grapevines (Cv. Sangiovese) Grafted on Rootstocks with Different Resistance to Water Deficit. Irrig. Sci. 2022, 1–15. [Google Scholar] [CrossRef]
- Baeza, P.; Junquera, P.; Peiro, E.; Lissarrague, J.R.; Uriarte, D.; Vilanova, M. Effects of Vine Water Status on Yield Components, Vegetative Response and Must and Wine Composition; IntechOpen: London, UK, 2019; ISBN 978-1-78984-613-3. [Google Scholar]
- Matthews, M.A.; Anderson, M.M.; Schultz, R. Phenologic and Growth Responses to Early and Late Season Water Deficits in Cabernet Franc. Vitis 1987, 26, 147–160. [Google Scholar]
- Bois, B.; Pauthier, B.; Brillante, L.; Mathieu, O.; Leveque, J.; Van Leeuwen, C.; Castel, T.; Richard, Y. Sensitivity of Grapevine Soil–Water Balance to Rainfall Spatial Variability at Local Scale Level. Front. Environ. Sci. 2020, 8, 110. [Google Scholar] [CrossRef]
- Del-Campo-Sanchez, A.; Moreno, M.; Ballesteros, R.; Hernandez-Lopez, D. Geometric Characterization of Vines from 3D Point Clouds Obtained with Laser Scanner Systems. Remote Sens. 2019, 11, 2365. [Google Scholar] [CrossRef] [Green Version]
- Cabo, C.; Del Pozo, S.; Rodríguez-Gonzálvez, P.; Ordóñez, C.; González-Aguilera, D. Comparing Terrestrial Laser Scanning (TLS) and Wearable Laser Scanning (WLS) for Individual Tree Modeling at Plot Level. Remote Sens. 2018, 10, 540. [Google Scholar] [CrossRef] [Green Version]
- Lichti, D.D.; Jamtsho, S. Angular Resolution of Terrestrial Laser Scanners. Photogramm. Rec. 2006, 21, 141–160. [Google Scholar] [CrossRef]
- Che, E.; Olsen, M.J. Multi-Scan Segmentation of Terrestrial Laser Scanning Data Based on Normal Variation Analysis. ISPRS J. Photogramm. Remote Sens. 2018, 143, 233–248. [Google Scholar] [CrossRef]
- Sun, S.; Li, C.; Paterson, A.H. In-Field High-Throughput Phenotyping of Cotton Plant Height Using LiDAR. Remote Sens. 2017, 9, 377. [Google Scholar] [CrossRef] [Green Version]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement Method | Sensor Moving Speed | Angular Resolution of Laser Scanner | Measurement of Pruning Wood Surface | Laser Scanner Distance from Pruning Wood | Laser Scanner Distance from Soil |
|---|---|---|---|---|---|
| Ι | 2 km/h | 1° | Entire pruning wood surface | 0.5 m | 1.2 m |
| ΙΙ | 2 km/h | 1° | Lower half of pruning wood surface | 0.3 m | 0.9 m |
| ΙΙΙ | 2 km/h | 1° | Upper half of pruning wood surface | 0.3 m | 1.5 m |
| IV | 4 km/h | 1° | Entire pruning wood surface | 0.5 m | 1.2 m |
| V | 2 km/h | 0.5° | Entire pruning wood surface | 0.5 m | 1.2 m |
| VI | 2 km/h | 0.25° | Entire pruning wood surface | 0.5 m | 1.2 m |
| Parameter | Minimum | Maximum | Mean | Standard Deviation | CV (%) |
|---|---|---|---|---|---|
| 2014 | |||||
| Method Ι | 22 | 40 | 31 | 5 | 16.2 |
| Method ΙI | 22 | 38 | 30 | 4 | 12.7 |
| Method ΙII | 21 | 36 | 28 | 4 | 15.6 |
| Method ΙV | 23 | 40 | 31 | 4 | 13.5 |
| Method V | 39 | 83 | 62 | 12 | 18.7 |
| Method VΙ | 100 | 171 | 129 | 18 | 14.1 |
| Pruning Wood Weight | 0.46 | 1.43 | 0.90 | 0.240 | 26.8 |
| Canes per vine | 10 | 15 | 12 | 1 | 11.7 |
| 2015 | |||||
| Method Ι | 19 | 37 | 30 | 4 | 14.9 |
| Method ΙI | 22 | 36 | 31 | 3 | 11.0 |
| Method ΙII | 14 | 37 | 25 | 6 | 23.4 |
| Method ΙV | 23 | 44 | 32 | 4 | 14.1 |
| Method V | 42 | 87 | 62 | 11 | 18.4 |
| Method VΙ | 90 | 159 | 118 | 17 | 14.5 |
| Pruning Wood Weight | 0.63 | 1.93 | 1.18 | 0.369 | 31.2 |
| Canes per vine | 9 | 14 | 12 | 1 | 9.9 |
| All years | |||||
| Method Ι | 19 | 40 | 31 | 5 | 15.9 |
| Method ΙI | 22 | 38 | 30 | 4 | 12.0 |
| Method ΙII | 14 | 37 | 27 | 5 | 20.2 |
| Method ΙV | 23 | 44 | 31 | 4 | 14.0 |
| Method V | 39 | 87 | 62 | 11 | 18.4 |
| Method VΙ | 90 | 171 | 124 | 18 | 14.8 |
| Pruning Wood Weight | 0.46 | 1.93 | 1.04 | 0.339 | 32.6 |
| Canes per vine | 9 | 15 | 12 | 1 | 10.7 |
| Measurement Method | 2014 | 2015 | All Years | |||
|---|---|---|---|---|---|---|
| Pruning Wood Weight | Canes per Vine | Pruning Wood Weight | Canes per Vine | Pruning Wood Weight | Canes per Vine | |
| Method I | 0.806 ** | 0.152 | 0.529 ** | 0.065 | 0.503 ** | 0.129 |
| Method II | 0.634 ** | 0.146 | 0.520 ** | 0.134 | 0.555 ** | 0.123 |
| Method III | 0.600 ** | 0.013 | 0.607 ** | 0.001 | 0.420 ** | 0.026 |
| Method IV | 0.624 ** | −0.105 | 0.358 | 0.327 | 0.460 ** | 0.096 |
| Method V | 0.839 ** | 0.049 | 0.291 | −0.093 | 0.448 ** | −0.017 |
| Method VI | 0.664 ** | 0.098 | 0.374 | 0.206 | 0.292 * | 0.160 |
| Year | Plot of Fitted Model | Model Parameters | Results |
|---|---|---|---|
| 2014 | 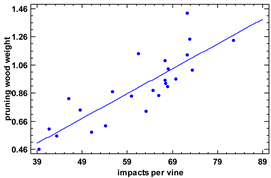 | Equation | Pruning wood weight = 0.018 × Method V − 0.183 |
| R2 | 0.71 | ||
| Mean Absolute Error | 0.104 kg/vine | ||
| 2015 | 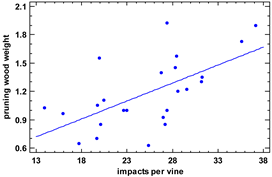 | Equation | Pruning wood weight = 0.038 × Method III + 0.227 |
| R2 | 0.37 | ||
| Mean Absolute Error | 0.234 kg/vine | ||
| All years | 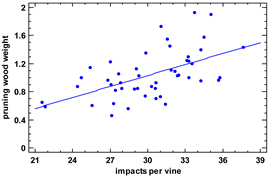 | Equation | Pruning wood weight = 0.052 × Method II − 0.530 |
| R2 | 0.31 | ||
| Mean Absolute Error | 0.220 kg/vine |
| Parameter | Minimum | Maximum | Mean | Standard Deviation | CV (%) |
|---|---|---|---|---|---|
| 2014 | |||||
| Method Ι | 10 | 31 | 21 | 6 | 26.1 |
| Method ΙI | 11 | 29 | 21 | 5 | 24.9 |
| Method ΙII | 7 | 28 | 18 | 6 | 32.4 |
| Method ΙV | 8 | 32 | 21 | 6 | 30.6 |
| Method V | 16 | 61 | 41 | 13 | 32.8 |
| Method VΙ | 34 | 120 | 79 | 23 | 28.7 |
| Pruning Wood Weight | 0.070 | 0.610 | 0.327 | 0.039 | 28.7 |
| Canes per vine | 7 | 16 | 11 | 2 | 21.2 |
| 2015 | |||||
| Method Ι | 8 | 33 | 21 | 6 | 30.6 |
| Method ΙI | 13 | 32 | 23 | 6 | 27.5 |
| Method ΙII | 5 | 27 | 15 | 7 | 43.8 |
| Method ΙV | 9 | 32 | 21 | 7 | 34.3 |
| Method V | 20 | 59 | 41 | 13 | 31.1 |
| Method VΙ | 39 | 120 | 83 | 25 | 29.8 |
| Pruning Wood Weight | 0.110 | 0.700 | 0.359 | 0.191 | 53.1 |
| Canes per vine | 6 | 15 | 11 | 3 | 26.4 |
| All years | |||||
| Method Ι ( | 8 | 33 | 21 | 6 | 28.4 |
| Method ΙI | 11 | 32 | 22 | 6 | 26.1 |
| Method ΙII | 5 | 28 | 17 | 6 | 38.1 |
| Method ΙV | 8 | 32 | 21 | 7 | 32.0 |
| Method V | 16 | 61 | 41 | 13 | 31.4 |
| Method VΙ | 34 | 120 | 81 | 24 | 28.9 |
| Pruning Wood Weight | 0.070 | 0.700 | 0.342 | 0.174 | 51.0 |
| Canes per vine | 6 | 16 | 11 | 3 | 23.6 |
| Measurement Method | 2014 | 2015 | All Years | |||
|---|---|---|---|---|---|---|
| Pruning Wood Weight | Canes per Vine | Pruning Wood Weight | Canes per Vine | Pruning Wood Weight | Canes per Vine | |
| Method Ι | 0.918 ** | 0.683 ** | 0.614 ** | 0.679 ** | 0.737 ** | 0.686 ** |
| Method ΙΙ | 0.871 ** | 0.398 | 0.660 ** | 0.532 * | 0.749 ** | 0.462 ** |
| Method ΙΙΙ | 0.912 ** | 0.468 | 0.734 ** | 0.567 * | 0.762 ** | 0.522 ** |
| Method IV | 0.940 ** | 0.527 * | 0.806 ** | 0.685 ** | 0.861 ** | 0.604 ** |
| Method V | 0.710 ** | 0.611 ** | 0.784 ** | 0.639 ** | 0.741 ** | 0.619 ** |
| Method VI | 0.966 ** | 0.660 ** | 0.803 ** | 0.768 ** | 0.872 ** | 0.707 ** |
| Year | Plot of Fitted Model | ModelParameters | Results |
|---|---|---|---|
| 2014 | 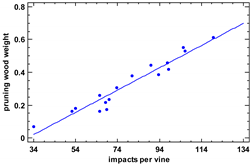 | Equation | Pruning wood weight = 0.007 × Method VI − 0.209 |
| R2 | 0.93 | ||
| MeanAbsolute Error | 0.035 kg/vine | ||
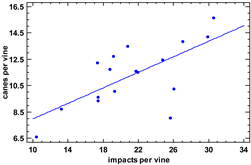 | Equation | Canes per vine = 0.295 × Method I + 5.025 | |
| R2 | 0.47 | ||
| MeanAbsolute Error | 1.26 canes/vine | ||
| 2015 | 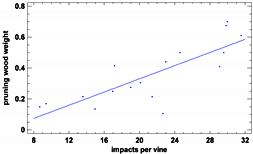 | Equation | Pruning wood weight = 0.021 × Method IV − 0.097 |
| R2 | 0.65 | ||
| MeanAbsolute Error | 0.087 kg/vine | ||
 | Equation | Canes per vine = 0.089 × Method VI + 3.402 | |
| R2 | 0.60 | ||
| MeanAbsolute Error | 1.47 canes/vine | ||
| All years | 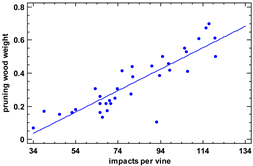 | Equation | Pruning wood weight = 0.006 × Method VI − 0.184 |
| R2 | 0.76 | ||
| MeanAbsolute Error | 0.064 kg/vine | ||
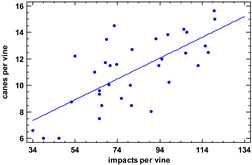 | Equation | Canes per vine = 0.078 × Method VI + 4.686 | |
| R2 | 0.50 | ||
| MeanAbsolute Error | 1.51 canes/vine |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Anastasiou, E.; Balafoutis, A.; Theocharis, S.; Theodorou, N.; Koundouras, S.; Fountas, S. Assessment of Laser Scanner Use under Different Settings in Two Differently Managed Vineyards for Estimating Pruning Wood Parameters. AgriEngineering 2022, 4, 733-746. https://doi.org/10.3390/agriengineering4030047
Anastasiou E, Balafoutis A, Theocharis S, Theodorou N, Koundouras S, Fountas S. Assessment of Laser Scanner Use under Different Settings in Two Differently Managed Vineyards for Estimating Pruning Wood Parameters. AgriEngineering. 2022; 4(3):733-746. https://doi.org/10.3390/agriengineering4030047
Chicago/Turabian StyleAnastasiou, Evangelos, Athanasios Balafoutis, Serafeim Theocharis, Nikolaos Theodorou, Stefanos Koundouras, and Spyros Fountas. 2022. "Assessment of Laser Scanner Use under Different Settings in Two Differently Managed Vineyards for Estimating Pruning Wood Parameters" AgriEngineering 4, no. 3: 733-746. https://doi.org/10.3390/agriengineering4030047
APA StyleAnastasiou, E., Balafoutis, A., Theocharis, S., Theodorou, N., Koundouras, S., & Fountas, S. (2022). Assessment of Laser Scanner Use under Different Settings in Two Differently Managed Vineyards for Estimating Pruning Wood Parameters. AgriEngineering, 4(3), 733-746. https://doi.org/10.3390/agriengineering4030047