
Energy and Spectral Efficiency Analysis for UAV-to-UAV Communication in Dynamic Networks for Smart Cities


Abstract
Highlights
- The study provides a comprehensive analysis of UAV-to-UAV communication, focusing on energy and spectral efficiency across multiple frequency bands (2.4 GHz, 5.8 GHz, 28 GHz, and 60 GHz) in dynamic smart city environments.
- Results indicate that sub-6 GHz frequencies offer superior energy efficiency (up to 0.15 bits/Joule). At the same time, millimetre-wave bands (28 GHz and 60 GHz) suffer from higher path loss and reduced efficiency.
- Smart city UAV networks should adopt multi-band communication strategies, leveraging sub-6 GHz for long-range and energy-efficient connectivity while utilising mmWave bands for high-data-rate applications in close-proximity scenarios.
- Adaptive trajectory planning, dynamic frequency selection, and machine-learning-driven power control are essential to optimising UAV network efficiency, ensuring sustainable and high-performance communication in urban environments.
Abstract
1. Introduction
- 1.
- 2.
- 3.
- 4.
- An evaluation of energy efficiency and spectral efficiency across different UAV altitudes, distances, and weather conditions, utilising realistic multipath fading models such as Rayleigh and Rician fading to accurately simulate urban environments.
- This study examines the trade-offs between energy efficiency and spectral efficiency, offering insights into the design of communication protocols that effectively balance these two metrics.
- Strategies for enhancing UAV communication systems in smart cities, focusing on scalability, sustainability, and operational reliability.
2. System Model for UAV-to-UAV Communication in Dynamic Networks for Smart Cities
2.1. Channel Model for UAV-to-UAV Communication
- Path Loss and Fading: We integrate classical models with scenario-based parameters for urban settings. This guarantees the inclusion of both Line-of-Sight (LoS) and Non-Line-of-Sight (NLoS) circumstances characteristic of urban environments.
- Mobility Profiles: The locations of UAVs change over time, imitating flight corridors or random waypoint trajectories. Distances , therefore, transform into time-dependent functions, illustrating the influence of altitudes and horizontal velocities on received signal strength.
- represents the large-scale path loss, which depends on the distance between UAVs and environmental attenuation;
- captures small-scale fading, modelled as a complex Gaussian random variable .
2.1.1. Path Loss Model
- is the wavelength of the transmitted signal, with c is the speed of light, and f is the carrier frequency;
- is the distance between UAVs and ;
- is the environmental attenuation coefficient.
2.1.2. Distance Model in 3D Space
2.1.3. Small-Scale Fading Model
- is the peak amplitude of the LoS component;
- is the modified Bessel function of the first kind.
2.2. Beamforming and Adaptive Communication
- and are the indices for horizontal and vertical array elements, respectively;
- and are the elevation and azimuth angles of the transmitted beam;
- d is the element spacing within the array.
2.3. Received Power with Beamforming
- is the transmit power of UAV ;
- is the time-varying channel response matrix;
- is the adaptive steering vector.
2.4. Mobility and Dynamic Adaptation
3. Receiver Sensitivity Considerations for UAV Communication: Mathematical Analysis
3.1. Baseline Formulation of Receiver Sensitivity
- The constant, , is the thermal noise power density at ;
- B is the system bandwidth in Hz;
- (dB) is the receiver noise figure quantifying additional amplifier and mixer noise;
- (dB) is the minimal SNR required for the target BER under the chosen modulation and coding scheme.
3.2. Time-Varying Receiver Sensitivity Margin
3.3. Sensitivity in a Multi-UAV Network
Continuous Spatial UAV Distribution
3.4. Coverage Regions and Sensitivity Threshold
3.5. Sensitivity Constraints vs. Energy and Spectral Efficiency
- Increasing Transmit Power: This increases total power , impacting . If throughput cannot keep pace, overall energy efficiency suffers.
- Enhancing Beamforming Gains: Gains help offset the gap to , but require complex antenna arrays and precise real-time alignment. For high mobility or multi-trajectory UAV swarms, the overhead in scanning and tracking is significant.
- Adaptive Modulation/Coding: The system can reduce modulation order to lower the needed SNR, effectively decreasing in (11), but sacrificing spectral efficiency .
4. Energy Efficiency Analysis for UAV-to-UAV Communication in Dynamic Networks for Smart Cities
- : Energy efficiency.
- : Total communication capacity (bits per second).
- : Aggregate power consumption (watts).
4.1. Communication Capacity with Dynamic Channels
- B: Communication bandwidth (Hz).
- : Impairment factor modelling hardware imperfections.
- e: Euler’s number (base of the natural logarithm).
- : Signal-to-Noise Ratio (SNR).
- : Mathematical constant (ratio of a circle’s circumference to its diameter).
- : Minimum communication distance (meters).
- : Maximum communication distance (meters).
- : Transmitter power (watts).
- : Transmitter antenna gain (unitless).
- : Receiver antenna gain (unitless).
- : Wavelength of the transmitted signal (meters).
- : Path loss as a function of distance d (unitless).
4.2. Power Consumption Model
- : Transmission power (watts).
- : Power amplifier efficiency (unitless).
- : System power (watts).
- : Circuit power (watts).
- M: Number of UAVs in the communication network (unitless).
- : Control system power per UAV (watts).
- : Mobility-induced power (watts), modelled as:
- : Coefficient for acceleration-related power consumption (watts per ).
- : Rate of change of velocity (acceleration, ).
- : Coefficient for altitude-related power consumption (watts per meter).
- h: Altitude (meters).
- : Constant power offset for mobility (watts).
4.3. Energy Efficiency Formulation
- T: Total mission time (seconds).
5. Spectral Efficiency Analysis for UAV-to-UAV Communication in Dynamic Networks for Smart Cities
- is the spectral efficiency in bits per second per Hertz (bps/Hz);
- is the transmit power from UAV ;
- is the antenna gain between UAV and UAV ;
- represents the channel fading power between UAVs and ;
- is the interference power received by UAV from other UAVs or external sources;
- is the noise power spectral density;
- B is the bandwidth of the communication channel;
- denotes the expectation operator over fading realizations.
6. UAV-to-UAV Simulation Analysis Consideration in a Dynamic Network for Smart Cities
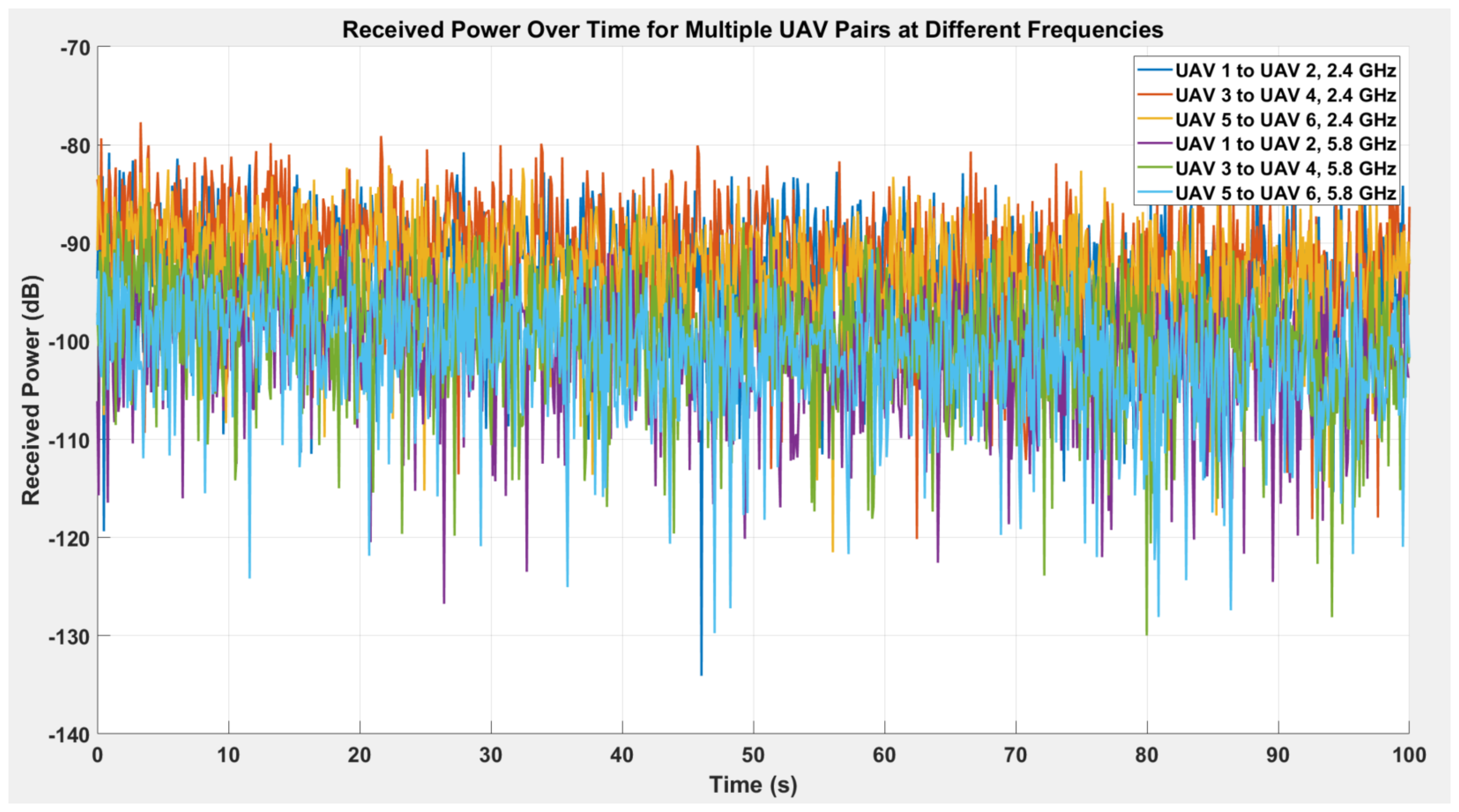
6.1. Analysis of Received Power Variability in UAV-to-UAV Communication Dynamic Network
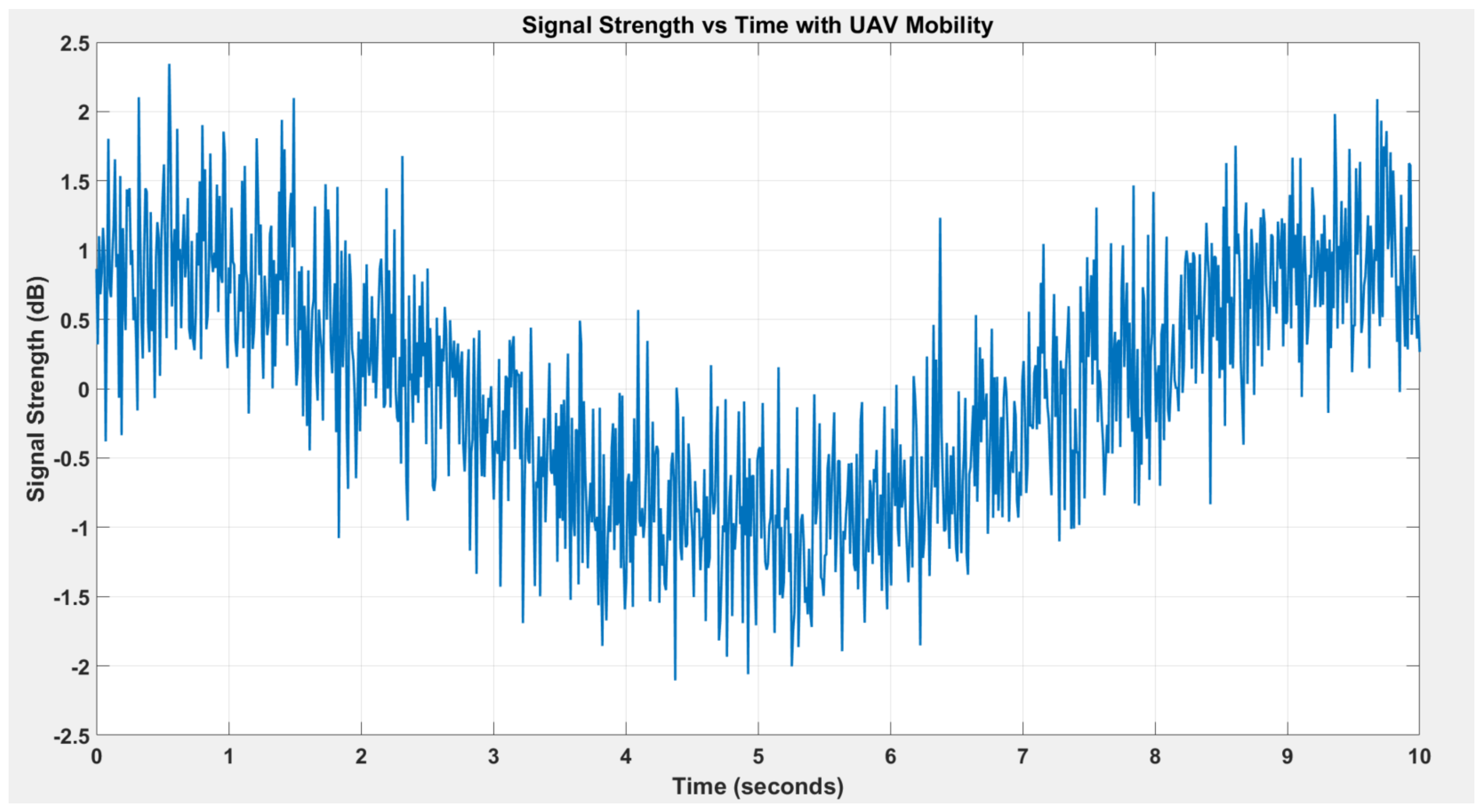
6.2. Impact of UAV Mobility on Signal Strength Variability over Time
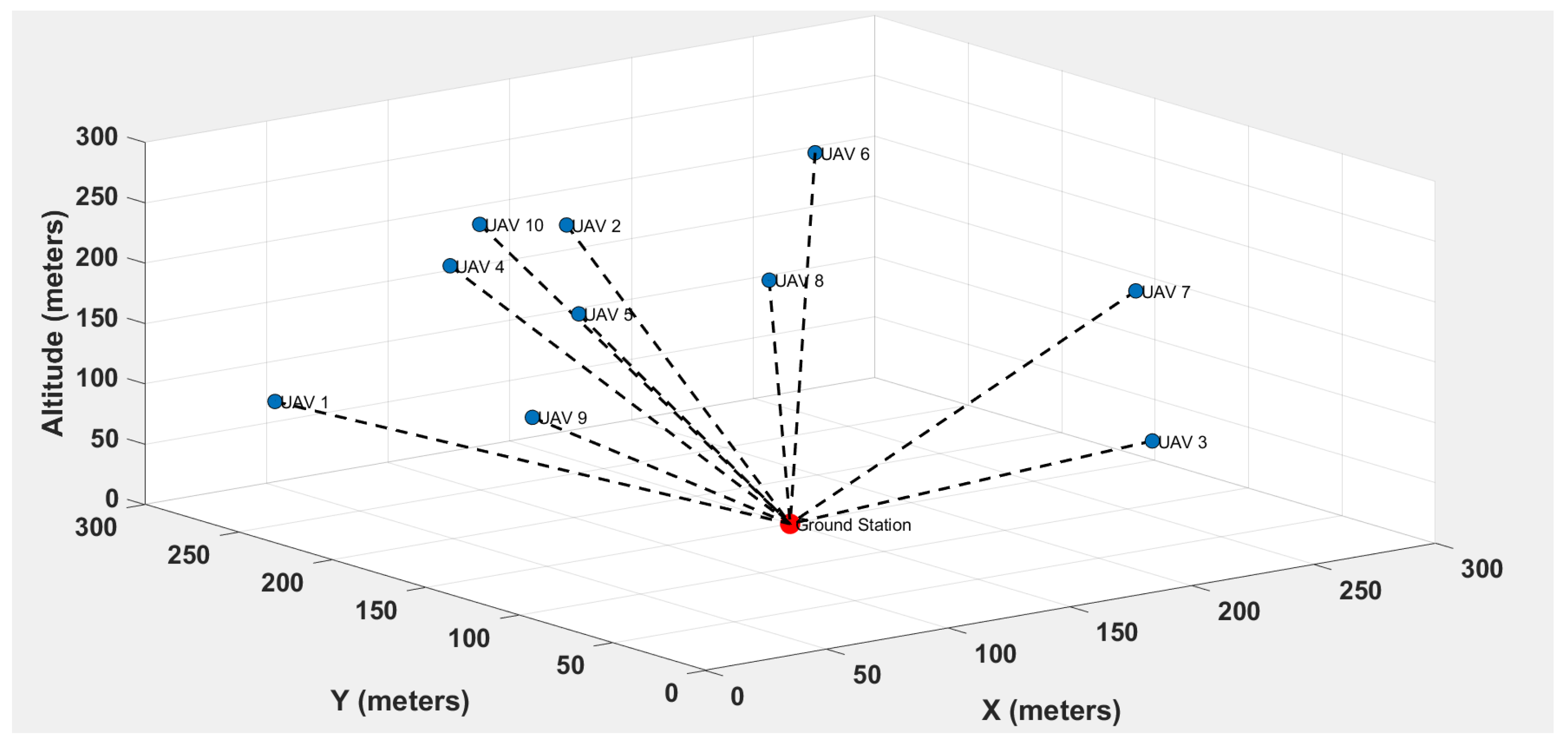
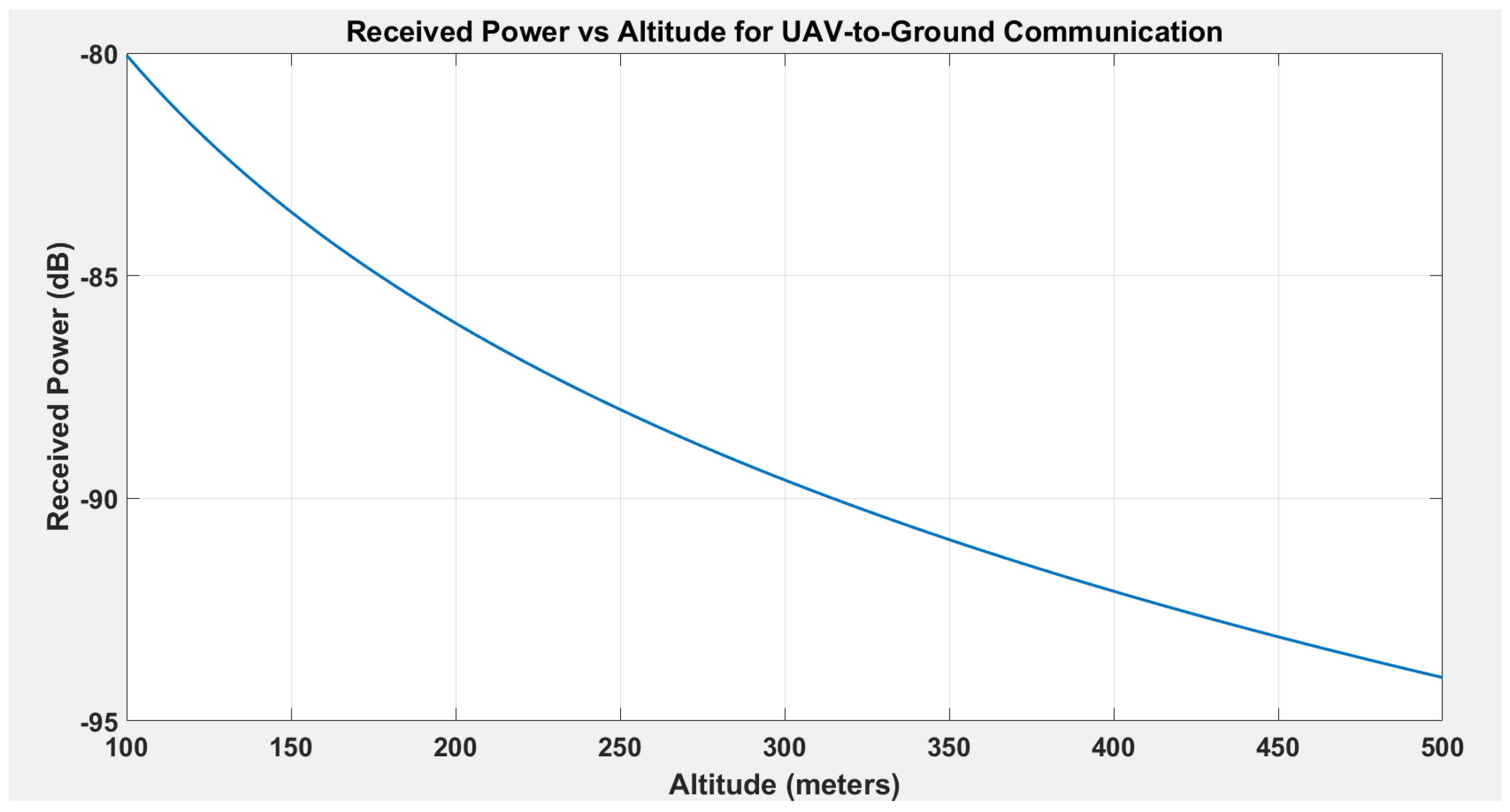
6.3. Received Power Dynamics in UAV-to-Ground Communication at Varying Altitudes
6.4. Impact of Multipath Fading on UAV Communication with Varying Distances
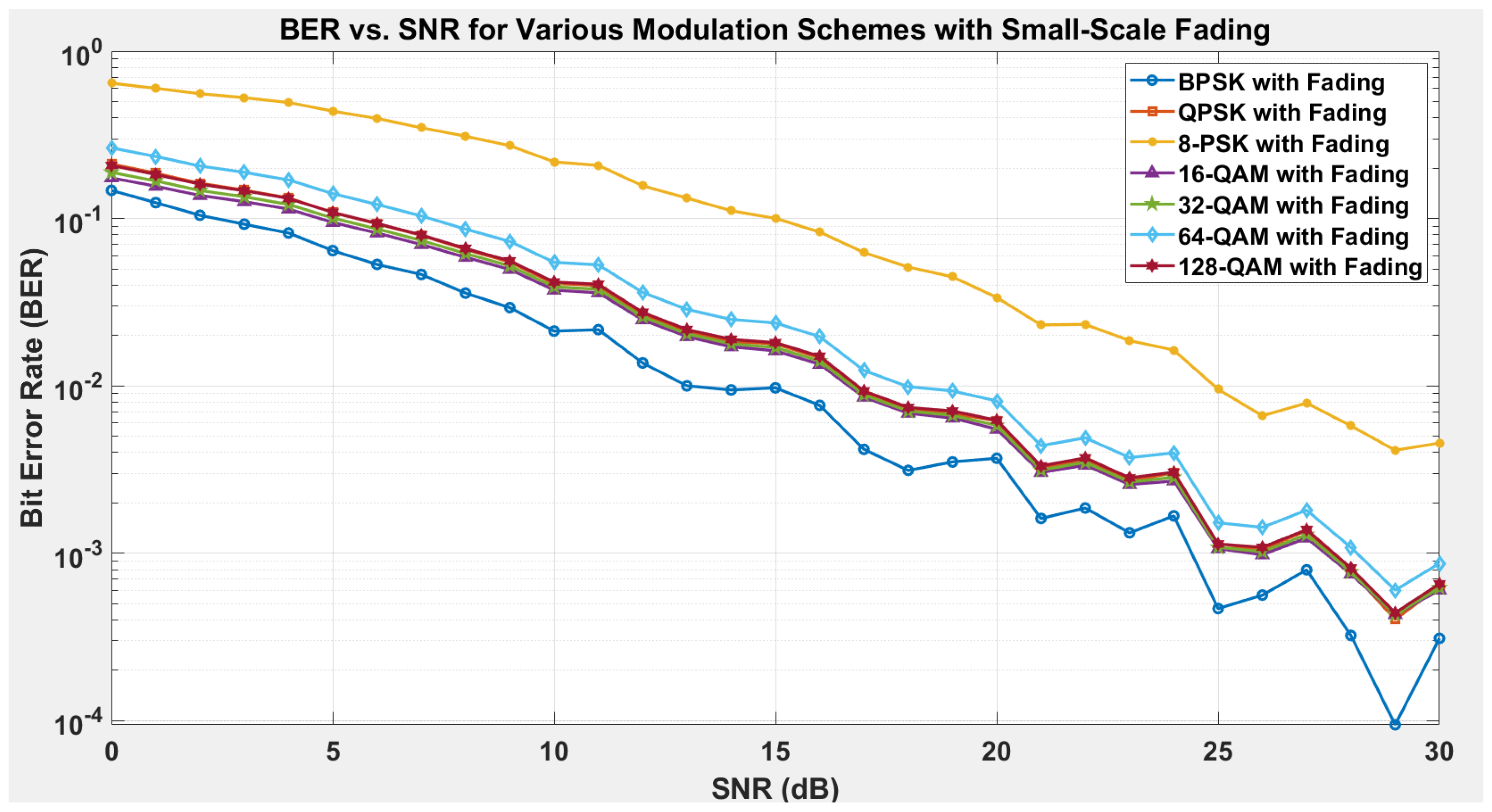
6.5. BER Performance of Modulation Schemes Under Small-Scale Fading in UAV Networks
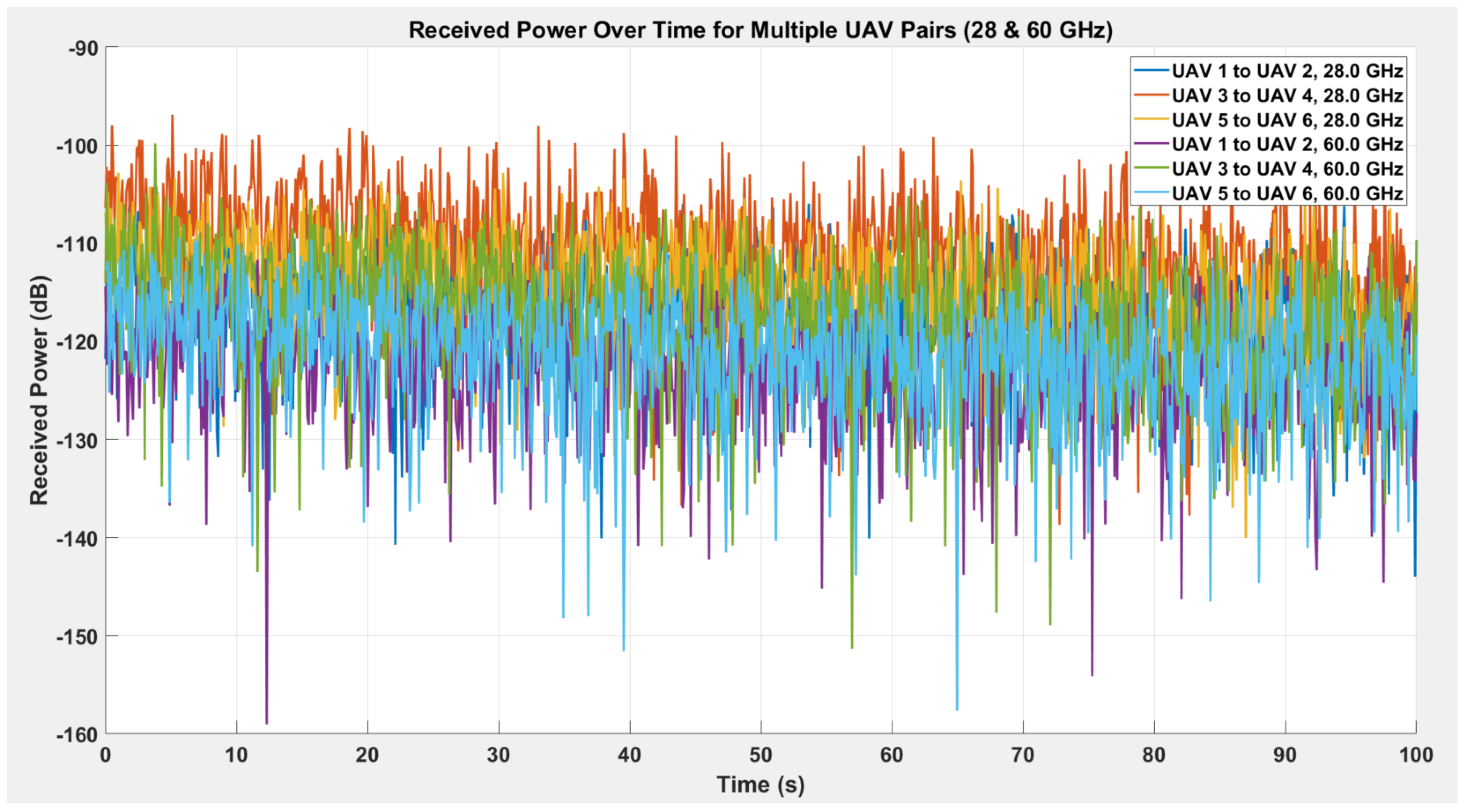
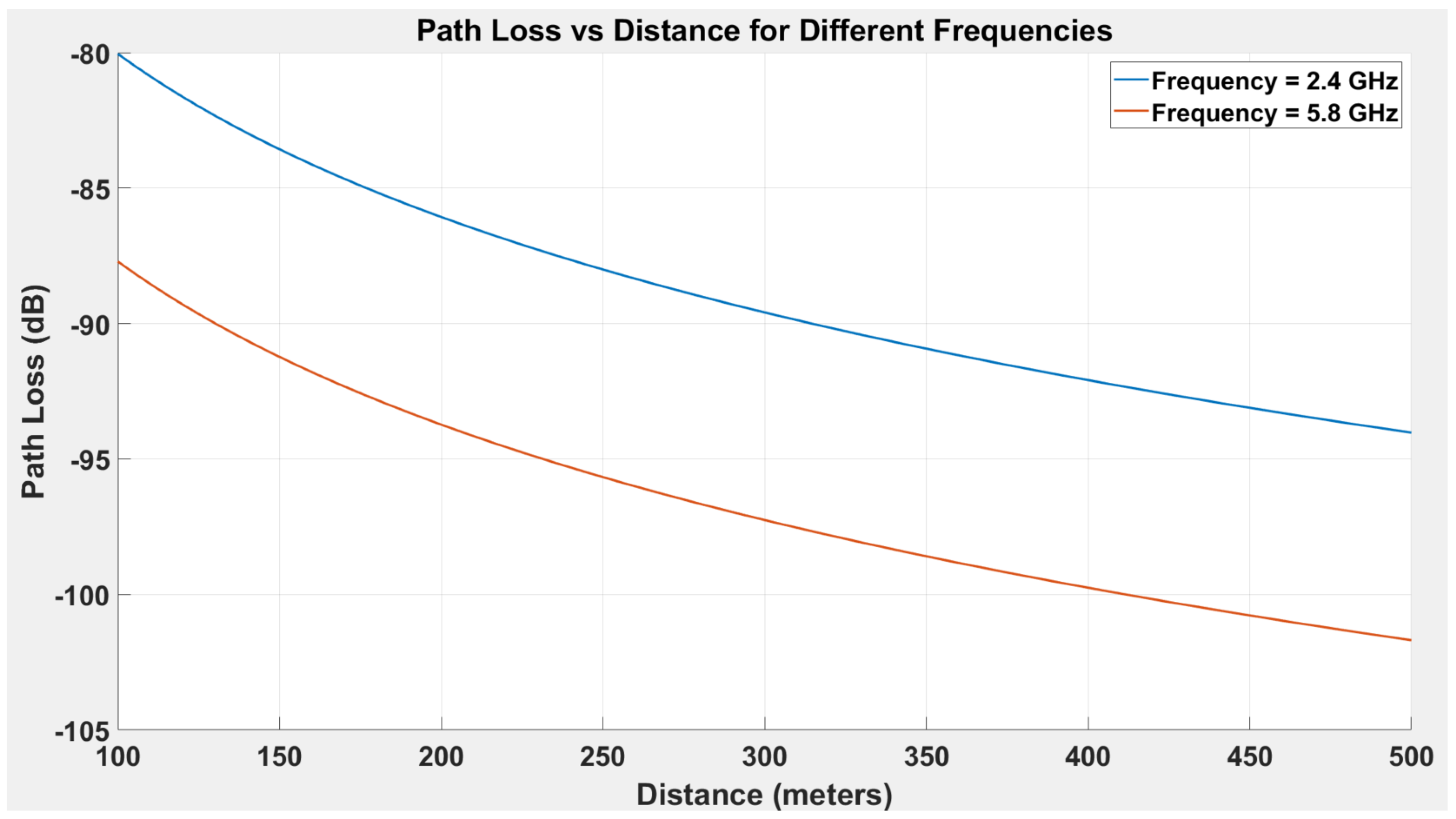
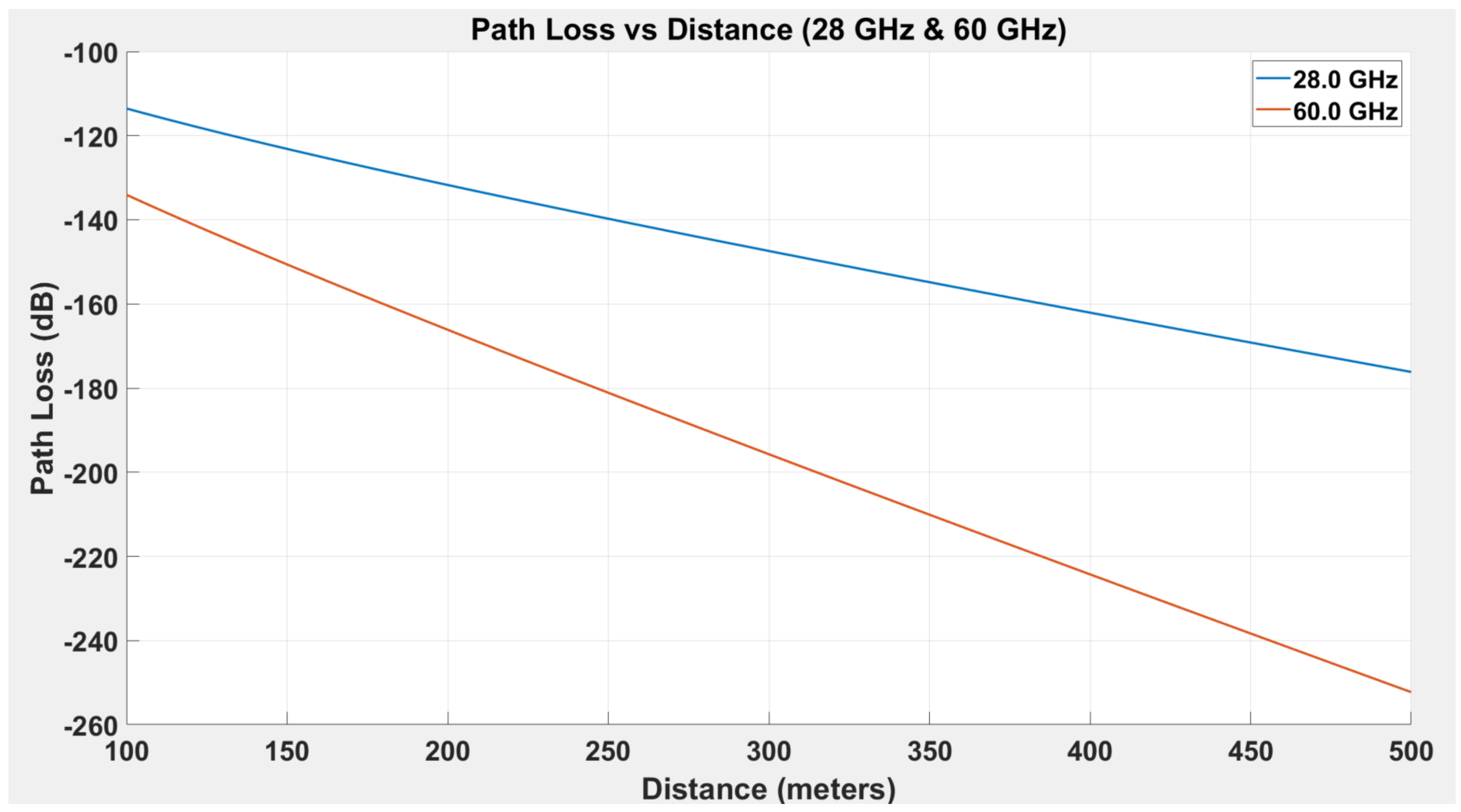
6.6. Path Loss Analysis for Different Frequencies in UAV Networks
- The 60 GHz offers a significantly wider bandwidth, which enhances spectral efficiency.
- However, the increased path loss and corresponding higher power requirement drastically reduce energy efficiency.
- Use 28 GHz for longer-range UAV corridors.
- Reserve 60 GHz for short-range, high-capacity data bursts within UAV clusters.
- Implement dynamic frequency switching to optimize both spectral and energy efficiency in real time.
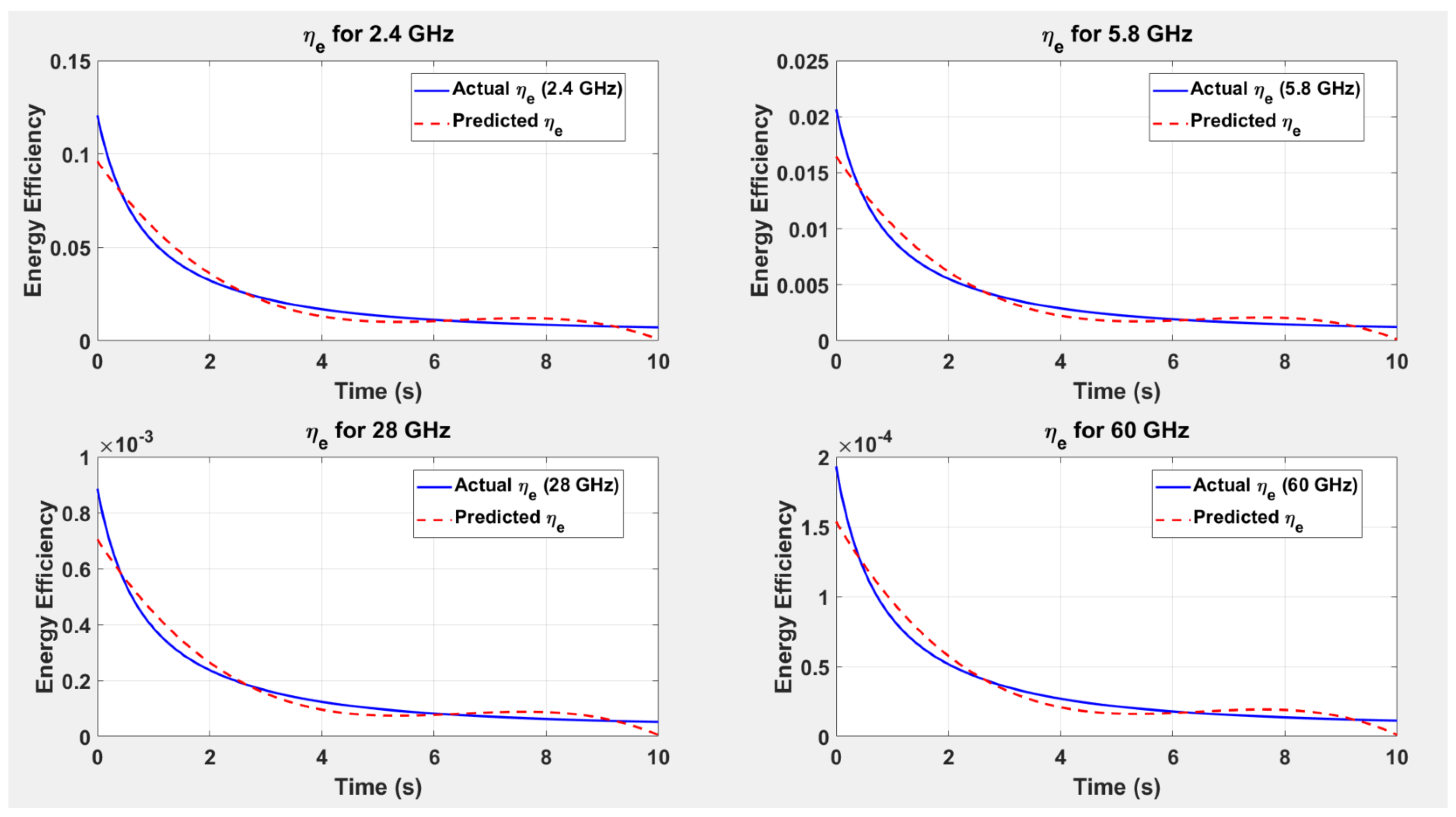
6.7. Comparison of Predicted and Actual Energy Efficiency for UAV Communication
6.8. Spectral Efficiency Analysis for Dynamic UAV Networks
6.8.1. Spectral Efficiency Analysis vs. Time for UAV-to-UAV Communication at 2.4 GHz and 5.8 GHz for Dynamic UAV Networks
6.8.2. Spectral Efficiency Analysis vs. Time for UAV-to-UAV Communication at 28 GHz and 60 GHz for Dynamic UAV Networks
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2020, 153, 119293. [Google Scholar] [CrossRef]
- Kuru, K. Planning the future of smart cities with swarms of fully autonomous unmanned aerial vehicles using a novel framework. IEEE Access 2021, 9, 6571–6595. [Google Scholar] [CrossRef]
- Colding, J.; Barthel, S.; Sörqvist, P. Wicked problems of smart cities. Smart Cities 2019, 2, 512–521. [Google Scholar] [CrossRef]
- Uko, M.; Ekpo, S.C.; Enahoro, S.; Elias, F. Performance Optimization of 5G–Satellite Integrated Networks for IoT Applications in Smart Cities: A Two-Ray Propagation Model Approach. Smart Cities 2024, 7, 3895–3913. [Google Scholar] [CrossRef]
- Bellini, P.; Bologna, D.; Nesi, P.; Pantaleo, G. A Unified Knowledge Model for Managing Smart City/IoT Platform Entities for Multitenant Scenarios. Smart Cities 2024, 7, 2339–2365. [Google Scholar] [CrossRef]
- Elberzhager, F.; Mennig, P.; Polst, S.; Scherr, S.; Stüpfert, P. Towards a digital ecosystem for a smart city district: Procedure, results, and lessons learned. Smart Cities 2021, 4, 686–716. [Google Scholar] [CrossRef]
- Uko, M.; Ekpo, S. 8-12 GHz pHEMT MMIC low-noise amplifier for 5G and fiber-integrated satellite applications. Int. Rev. Aerosp. Eng. (IREASE) 2020, 13, 99–107. [Google Scholar] [CrossRef]
- Tcholtchev, N.; Schieferdecker, I. Sustainable and reliable information and communication technology for resilient smart cities. Smart Cities 2021, 4, 156–176. [Google Scholar] [CrossRef]
- Gu, X.; Duan, W.; Zhang, G.; Wen, M.; Choi, J.; Ho, P.H. Aerial reconfigurable intelligent surface-assisted terrestrial communications. IEEE Internet Things Mag. 2024, 7, 54–60. [Google Scholar]
- Elias, F.; Ekpo, S.; Alabi, S.; Uko, M.; Enahoro, S.; Ijaz, M.; Ji, H.; Unnikrishnan, R.; Olasunkanmi, N. Design of Multi-Sourced MIMO Multiband Hybrid Wireless RF-Perovskite Photovoltaic Energy Harvesting Subsystems for Iots Applications in Smart Cities. Technologies 2025, 13, 92. [Google Scholar] [CrossRef]
- López-Pérez, D.; De Domenico, A.; Piovesan, N.; Xinli, G.; Bao, H.; Qitao, S.; Debbah, M. A survey on 5G radio access network energy efficiency: Massive MIMO, lean carrier design, sleep modes, and machine learning. IEEE Commun. Surv. Tutor. 2022, 24, 653–697. [Google Scholar]
- Pandey, G.K.; Gurjar, D.S.; Yadav, S.; Jiang, Y.; Yuen, C. UAV-assisted communications with RF energy harvesting: A comprehensive survey. IEEE Commun. Surv. Tutor. 2024. [Google Scholar] [CrossRef]
- Xiao, Z.; Zhu, L.; Liu, Y.; Yi, P.; Zhang, R.; Xia, X.G.; Schober, R. A survey on millimeter-wave beamforming enabled UAV communications and networking. IEEE Commun. Surv. Tutor. 2021, 24, 557–610. [Google Scholar]
- Tabatabaei, S.A.H.; Fleury, M.; Qadri, N.N.; Ghanbari, M. Improving propagation modeling in urban environments for vehicular ad hoc networks. IEEE Trans. Intell. Transp. Syst. 2011, 12, 705–716. [Google Scholar]
- Li, J.; Niu, Y.; Wu, H.; Ai, B.; Chen, S.; Feng, Z.; Zhong, Z.; Wang, N. Mobility support for millimeter wave communications: Opportunities and challenges. IEEE Commun. Surv. Tutor. 2022, 24, 1816–1842. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.; Hayajneh, K.F.; Abdel-Razeq, S.; Al-Fuqaha, A. A systematic review of interference mitigation techniques in current and future UAV-assisted wireless networks. IEEE Open J. Commun. Soc. 2024, 5, 2815–2846. [Google Scholar]
- Haq, A.U.; Sefati, S.S.; Nawaz, S.J.; Mihovska, A.; Beliatis, M.J. Need of UAVs and Physical Layer Security in Next-Generation Non-Terrestrial Wireless Networks: Potential Challenges and Open Issues. IEEE Open J. Veh. Technol. 2025, 6, 554–595. [Google Scholar]
- Azari, M.M.; Geraci, G.; Garcia-Rodriguez, A.; Pollin, S. UAV-to-UAV communications in cellular networks. IEEE Trans. Wirel. Commun. 2020, 19, 6130–6144. [Google Scholar]
- Zhang, S.; Zhang, H.; Di, B.; Song, L. Cellular UAV-to-X communications: Design and optimization for multi-UAV networks. IEEE Trans. Wirel. Commun. 2019, 18, 1346–1359. [Google Scholar]
- Jin, H.; Jin, X.; Zhou, Y.; Guo, P.; Ren, J.; Yao, J.; Zhang, S. A survey of energy efficient methods for UAV communication. Veh. Commun. 2023, 41, 100594. [Google Scholar]
- Abubakar, A.I.; Ahmad, I.; Omeke, K.G.; Ozturk, M.; Ozturk, C.; Abdel-Salam, A.M.; Mollel, M.S.; Abbasi, Q.H.; Hussain, S.; Imran, M.A. A survey on energy optimization techniques in UAV-based cellular networks: From conventional to machine learning approaches. Drones 2023, 7, 214. [Google Scholar] [CrossRef]
- Tsiropoulos, G.I.; Dobre, O.A.; Ahmed, M.H.; Baddour, K.E. Radio resource allocation techniques for efficient spectrum access in cognitive radio networks. IEEE Commun. Surv. Tutor. 2014, 18, 824–847. [Google Scholar]
- Muzaffar, M.U.; Sharqi, R. A review of spectrum sensing in modern cognitive radio networks. Telecommun. Syst. 2024, 85, 347–363. [Google Scholar]
- Zhou, L.; Ma, H.; Yang, Z.; Zhou, S.; Zhang, W. Unmanned aerial vehicle communications: Path-loss modeling and evaluation. IEEE Veh. Technol. Mag. 2020, 15, 121–128. [Google Scholar]
- Duangsuwan, S. Measurement of Path Loss Characterization and Prediction Modeling for Swarm UAVs Air-to-Air Wireless Communication Systems. J. Commun. 2021, 16, 228–235. [Google Scholar]
- Liu, T.; Zhang, Z.; Jiang, H.; Qian, Y.; Liu, K.; Dang, J.; Wu, L. Measurement-based characterization and modeling for low-altitude UAV air-to-air channels. IEEE Access 2019, 7, 98832–98840. [Google Scholar]
- Ekpo, S. Thermal subsystem operational times analysis for ubiquitous small satellites relay in LEO. Int. Rev. Aerosp. Eng. (IREASE) 2018, 11, 48–57. [Google Scholar]
- Mishra, L.; Kaabouch, N. Impact of Weather Factors on Unmanned Aerial Vehicles’ Wireless Communications. Future Internet 2025, 17, 27. [Google Scholar] [CrossRef]
- Arya, S.; Yang, J.; Wang, Y. Towards the designing of low-latency sagin: Ground-to-uav communications over interference channel. Drones 2023, 7, 479. [Google Scholar] [CrossRef]
- Uko, M.; Ekpo, S.; Elias, F.; Alabi, S. A 3.2-3.8 GHz low-noise amplifier for 5G/6G satellite-cellular convergence applications. e-Prime-Adv. Electr. Eng. Electron. Energy 2024, 8, 100559. [Google Scholar]
- Sowdagar, F.S.; Karamtot, K.N. Simulation and analysis of 5G waveforms to reduce BER for vehicular communications. Veh. Commun. 2024, 47, 100777. [Google Scholar] [CrossRef]
- Alhaj, N.A.; Jamlos, M.F.; Manap, S.A.; Abdelsalam, S.; Bakhit, A.A.; Mamat, R.; Jamlos, M.A.; Gismalla, M.S.M.; Hamdan, M. Integration of hybrid networks, AI, ultra massive-MIMO, THz frequency, and FBMC modulation toward 6G requirements: A review. IEEE Access 2023, 12, 483–513. [Google Scholar] [CrossRef]
- Liu, R.; Guo, K.; An, K.; Zhou, F.; Wu, Y.; Huang, Y.; Zheng, G. Resource allocation for NOMA-enabled cognitive satellite–UAV–terrestrial networks with imperfect CSI. IEEE Trans. Cogn. Commun. Netw. 2023, 9, 963–976. [Google Scholar] [CrossRef]
- Yan, X.; An, K.; Liang, T.; Zheng, G.; Ding, Z.; Chatzinotas, S.; Liu, Y. The application of power-domain non-orthogonal multiple access in satellite communication networks. IEEE Access 2019, 7, 63531–63539. [Google Scholar] [CrossRef]
- Zhang, H.; Xi, S.; Jiang, H.; Shen, Q.; Shang, B.; Wang, J. Resource allocation and offloading strategy for UAV-assisted LEO satellite edge computing. Drones 2023, 7, 383. [Google Scholar] [CrossRef]
- Saraswat, D.; Verma, A.; Bhattacharya, P.; Tanwar, S.; Sharma, G.; Bokoro, P.N.; Sharma, R. Blockchain-based federated learning in UAVs beyond 5G networks: A solution taxonomy and future directions. IEEe Access 2022, 10, 33154–33182. [Google Scholar] [CrossRef]
- Wang, Z.; Cao, Y.; Chang, Z.; Lv, T.; Ni, W. Energy efficiency maximization in UAV communication networks with nonlinear energy harvesting. Comput. Netw. 2024, 241, 110222. [Google Scholar] [CrossRef]
- Abbas, N.; Abbas, Z.; Liu, X.; Khan, S.S.; Foster, E.D.; Larkin, S. A survey: Future smart cities based on advance control of Unmanned Aerial Vehicles (UAVs). Appl. Sci. 2023, 13, 9881. [Google Scholar] [CrossRef]
- Cao, B.; Sun, Z.; Zhang, J.; Gu, Y. Resource allocation in 5G IoV architecture based on SDN and fog-cloud computing. IEEE Trans. Intell. Transp. Syst. 2021, 22, 3832–3840. [Google Scholar] [CrossRef]
- Nguyen, T.; Katila, R.; Gia, T.N. An advanced Internet-of-Drones System with Blockchain for improving quality of service of Search and Rescue: A feasibility study. Future Gener. Comput. Syst. 2023, 140, 36–52. [Google Scholar] [CrossRef]
- Khan, A.; Gupta, S.; Gupta, S.K. Emerging UAV technology for disaster detection, mitigation, response, and preparedness. J. Field Robot. 2022, 39, 905–955. [Google Scholar] [CrossRef]
- Alfakih, T.; Hassan, M.M.; Al-Razgan, M. Multi-objective accelerated particle swarm optimization with dynamic programing technique for resource allocation in mobile edge computing. IEEE Access 2021, 9, 167503–167520. [Google Scholar] [CrossRef]
- Deng, C.; Fang, X.; Wang, X. UAV-enabled mobile-edge computing for AI applications: Joint model decision, resource allocation, and trajectory optimization. IEEE Internet Things J. 2022, 10, 5662–5675. [Google Scholar] [CrossRef]
- Li, K.; Xie, S.; Zhu, T.; Wang, H. Constrained Multiobjective Optimization for UAV-assisted Mobile Edge Computing in Smart Agriculture: Minimizing Delay and Energy Consumption. IEEE Trans. Sustain. Comput. 2024, 9, 948–957. [Google Scholar]
- Nawaz, M.W.; Zhang, W.; Flynn, D.; Zhang, L.; Swash, R.; Abbasi, Q.H.; Imran, M.A.; Popoola, O. 6G edge-networks and multi-UAV knowledge fusion for urban autonomous vehicles. Phys. Commun. 2024, 67, 102479. [Google Scholar] [CrossRef]
- Al-Dosari, K.; Fetais, N. A new shift in implementing unmanned aerial vehicles (UAVs) in the safety and security of smart cities: A systematic literature review. Safety 2023, 9, 64. [Google Scholar] [CrossRef]
- Rahman, M.H.; Sejan, M.A.S.; Aziz, M.A.; Tabassum, R.; Baik, J.I.; Song, H.K. A comprehensive survey of unmanned aerial vehicles detection and classification using machine learning approach: Challenges, solutions, and future directions. Remote Sens. 2024, 16, 879. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Sym | 2.4 GHz | 5.8 GHz | 28 GHz | 60 GHz |
|---|---|---|---|---|---|
| Energy efficiency (bits/Joule) | 5 | 4.5 | 2.5 | 1.8 | |
| Total communication capacity (bps) | |||||
| Aggregate power consumption | 1 W | 1 W | 2 W | 3 W | |
| Communication bandwidth (Hz) | B | ||||
| Impairment factor | 0.8 | 0.8 | 0.7 | 0.6 | |
| Euler’s number | e | 2.718 | 2.718 | 2.718 | 2.718 |
| Signal-to-Noise Ratio (SNR) | 15 | 15 | 12 | 10 | |
| Minimum communication distance | 100 m | 100 m | 50 m | 30 m | |
| Maximum communication distance | 500 m | 500 m | 300 m | 150 m | |
| Transmitter power | 1 W | 1 W | 2 W | 3 W | |
| Transmitter antenna gain | 3 | 3 | 8 | 10 | |
| Receiver antenna gain | 3 | 3 | 8 | 10 | |
| Wavelength | 0.125 m | 0.0517 m | 0.0107 m | 0.005 m | |
| Path loss | 2 | 2.2 | 3.5 | 4.5 | |
| Transmission power | 0.5 W | 0.5 W | 1.5 W | 2 W | |
| Power amplifier efficiency | 0.35 | 0.35 | 0.25 | 0.20 | |
| System power | 1 W | 1 W | 2 W | 3 W | |
| Circuit power | 1 W | 1 W | 1.5 W | 2 W | |
| Number of UAVs | M | 10 | 10 | 10 | 10 |
| Control system power per UAV | 0.3 W | 0.3 W | 0.4 W | 0.5 W | |
| Acceleration power coefficient | 0.1 | 0.1 | 0.12 | 0.15 | |
| Rate of change of velocity | 10 | 10 | 5 | 3 | |
| Altitude power coefficient | 0.05 | 0.05 | 0.05 | 0.05 | |
| Altitude | h | 500 m | 500 m | 500 m | 500 m |
| Constant power offset | 0.1 | 0.1 | 0.15 | 0.2 | |
| Total mission time | T | 3600 s | 3600 s | 3600 s | 3600 s |
| Ref. | Technology Focus | Methodology Used | Performance Metrics | Experimental Validation | Relevance to Smart Cities |
|---|---|---|---|---|---|
| [4] 2024 | 5G-Satellite UAV Networks | Two-Ray Propagation Model | Spectral Efficiency, Path Loss | Simulation-based only | High |
| [17] 2025 | 5G NTN for IoT | Adaptive Beamforming | Coverage, Latency | Theoretical + Real-world case study | High |
| [32] 2023 | 6G Satellite–IoT | AI-driven 6G Networks | QoS, Latency | Conceptual model, lacks real tests | High |
| [33] 2023 | UAV-Assisted 5G | Hybrid 5G-satellite networks | Throughput, Delay | Simulation + real testbed | High |
| [34] 2019 | IoT via Satellite | Multi-Access Edge Computing | Latency, Network Coverage | Small satellite experiments | Moderate |
| [35] 2023 | UAV–Satellite Swarm | Deep RL for resource allocation | Power Efficiency | AI-based simulations | High |
| [36] 2022 | Edge UAV-IoT | Federated Learning | Latency, Energy | Some testbed experiments | High |
| [37] 2024 | Energy Harvesting UAVs | Backscatter Communication | Energy Efficiency | Theoretical | High |
| [38] 2023 | UAV Air Quality Monitoring | IoT-enabled UAVs | Data Throughput | Real-world validation | High |
| [39] 2021 | 5G-Satellite for V2X | UAV Relay for Vehicles | Reliability, Delay | Real-world testing | High |
| [40] 2023 | Blockchain UAV Networks | Secure resource allocation | Security, Latency | Simulated prototype | High |
| [41] 2022 | UAV Disaster Monitoring | AI-powered remote sensing | Data Accuracy | Field experiments | High |
| [42] 2021 | UAV Edge Computing | Federated Learning IoT | Data Processing Speed | Testbed experiments | High |
| [43] 2022 | AI UAV Resource Allocation | Mobile Edge Computing | Energy, Spectrum | AI-driven performance analysis | High |
| [44] 2024 | UAVs for Smart Agriculture | IoT sensor fusion | Data Efficiency | Experimental validation | Moderate |
| [45] 2024 | UAVs for 6G Edge AI | Adaptive AI routing | Delay, Energy | Simulated AI testing | High |
| [46] 2023 | IoT UAV for Public Safety | AI-based real-time awareness | Emergency Response | Real-world testing | High |
| [47] 2024 | UAV Smart Grid Inspection | AI-UAV for Energy Grids | Grid Stability | Industrial-scale testing | High |
| This work | UAV-to-UAV Smart Cities | MATLAB-based simulation | Energy, Spectral Efficiency | Mathematical analysis | High |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Uko, M.; Ekpo, S.; Ukommi, U.; Iwok, U.; Alabi, S. Energy and Spectral Efficiency Analysis for UAV-to-UAV Communication in Dynamic Networks for Smart Cities. Smart Cities 2025, 8, 54. https://doi.org/10.3390/smartcities8020054
Uko M, Ekpo S, Ukommi U, Iwok U, Alabi S. Energy and Spectral Efficiency Analysis for UAV-to-UAV Communication in Dynamic Networks for Smart Cities. Smart Cities. 2025; 8(2):54. https://doi.org/10.3390/smartcities8020054
Chicago/Turabian StyleUko, Mfonobong, Sunday Ekpo, Ubong Ukommi, Unwana Iwok, and Stephen Alabi. 2025. "Energy and Spectral Efficiency Analysis for UAV-to-UAV Communication in Dynamic Networks for Smart Cities" Smart Cities 8, no. 2: 54. https://doi.org/10.3390/smartcities8020054
APA StyleUko, M., Ekpo, S., Ukommi, U., Iwok, U., & Alabi, S. (2025). Energy and Spectral Efficiency Analysis for UAV-to-UAV Communication in Dynamic Networks for Smart Cities. Smart Cities, 8(2), 54. https://doi.org/10.3390/smartcities8020054