
DRBO—A Regional Scale Simulator Calibration Framework Based on Day-to-Day Dynamic Routing and Bayesian Optimization
 , , ,
, , ,  and
and
Abstract
Highlights
- Developed the DRBO framework, which successfully integrates dynamic routing and Bayesian optimization to calibrate large-scale regional traffic simulators, significantly enhancing calibration efficiency and accuracy.
- Validated DRBO using SFCTA demand data, achieving close alignment between simulated speed distributions and real-world observations, thereby demonstrating the framework’s reliability and scalability for regional traffic network calibration.
- Facilitates informed urban transportation planning by enabling accurate and efficient calibration of large-scale traffic simulators, thus supporting better infrastructure and policy decisions.
- Advances traffic simulation methodologies, providing a robust framework that can be adapted for various regional transportation networks, enhancing the reliability and scalability of traffic modeling efforts.
Abstract
1. Introduction
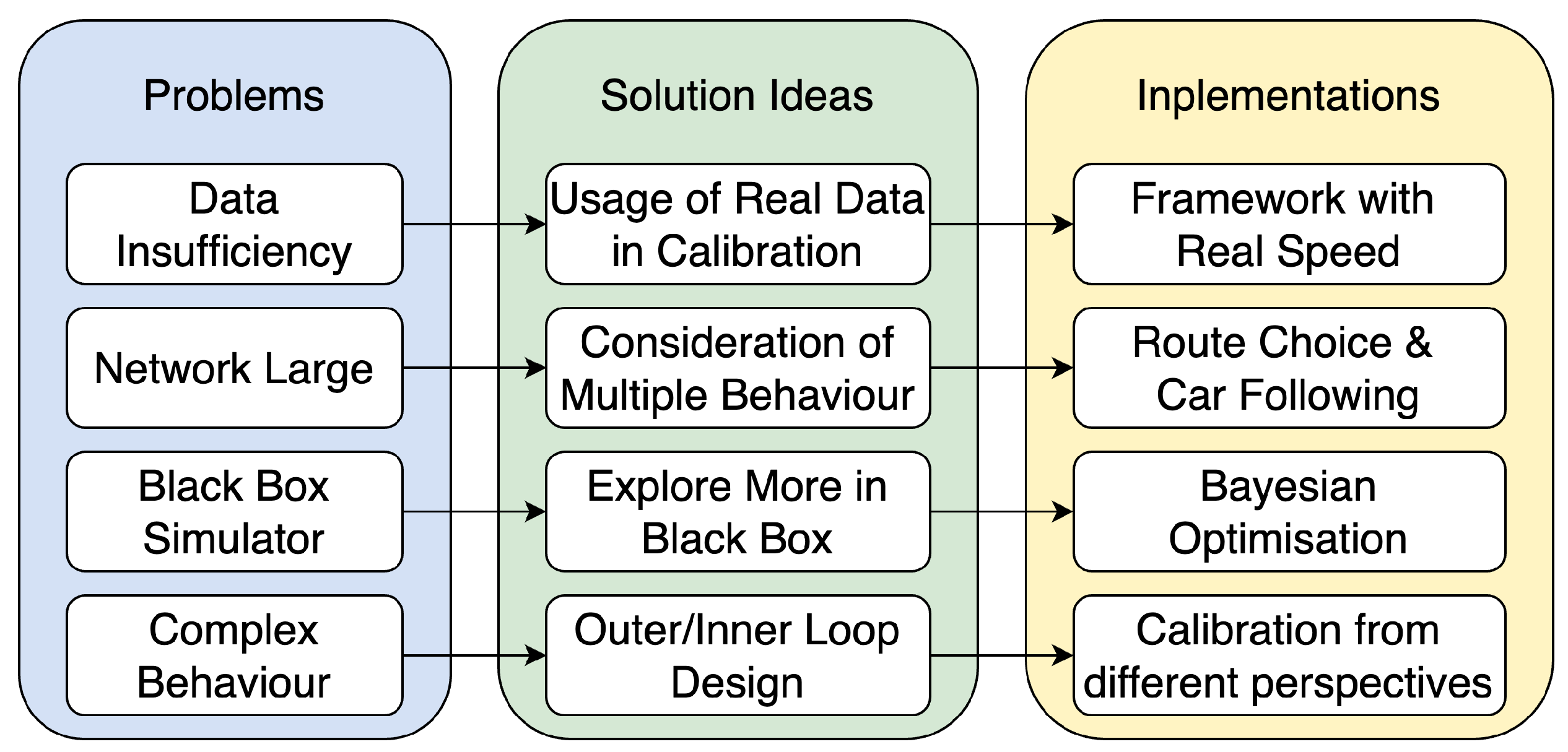
- Data Insufficiency: We have limited real data compared to the large-scale network (in the case of the Bay Area, the simulator has a route network composed of 547,697 edges and 223,328 nodes), which encompasses the average traveling speed of each link and the flow amount of part of the link in different time periods. Compared to the traditional car-following parameter calibration [11], we do not have vehicle-level trajectory data or real-time speed data.
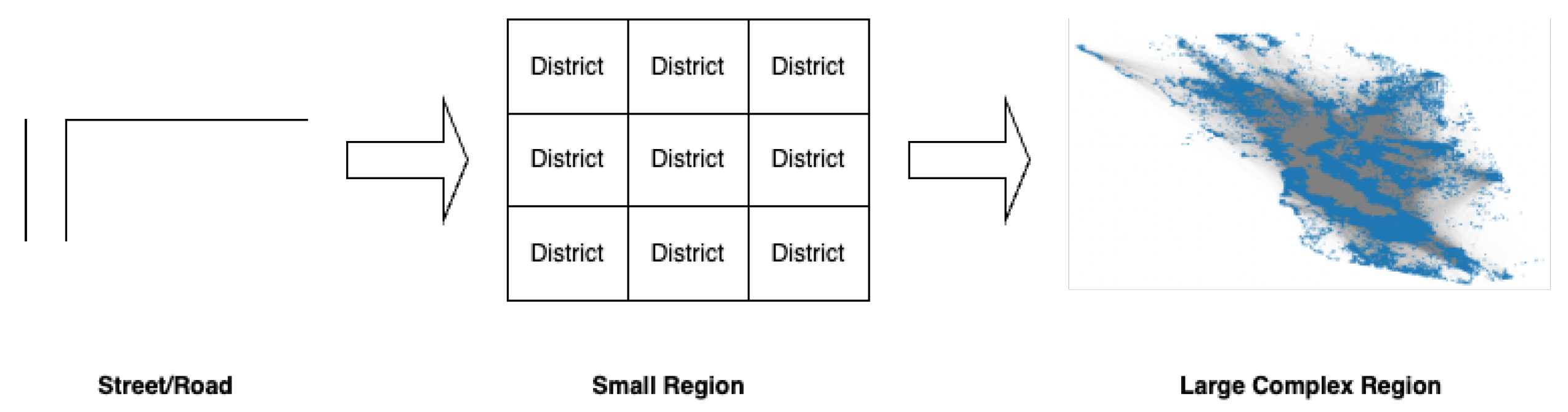
- Large Network Scale: Due to the large scale of the simulator, the traffic condition will be much more complex compared to the district- or city-level calibration [9,14] researchers conducted before. The growing complexity results in the advanced design of exploring the black box structure in the traffic simulator.
2. Literature Review
2.1. Simulation Calibration in Transportation Simulator
2.2. Routing Behavior
Factors in Routing Problem
2.3. Routing Problem as Game
2.4. Bayesian Optimization
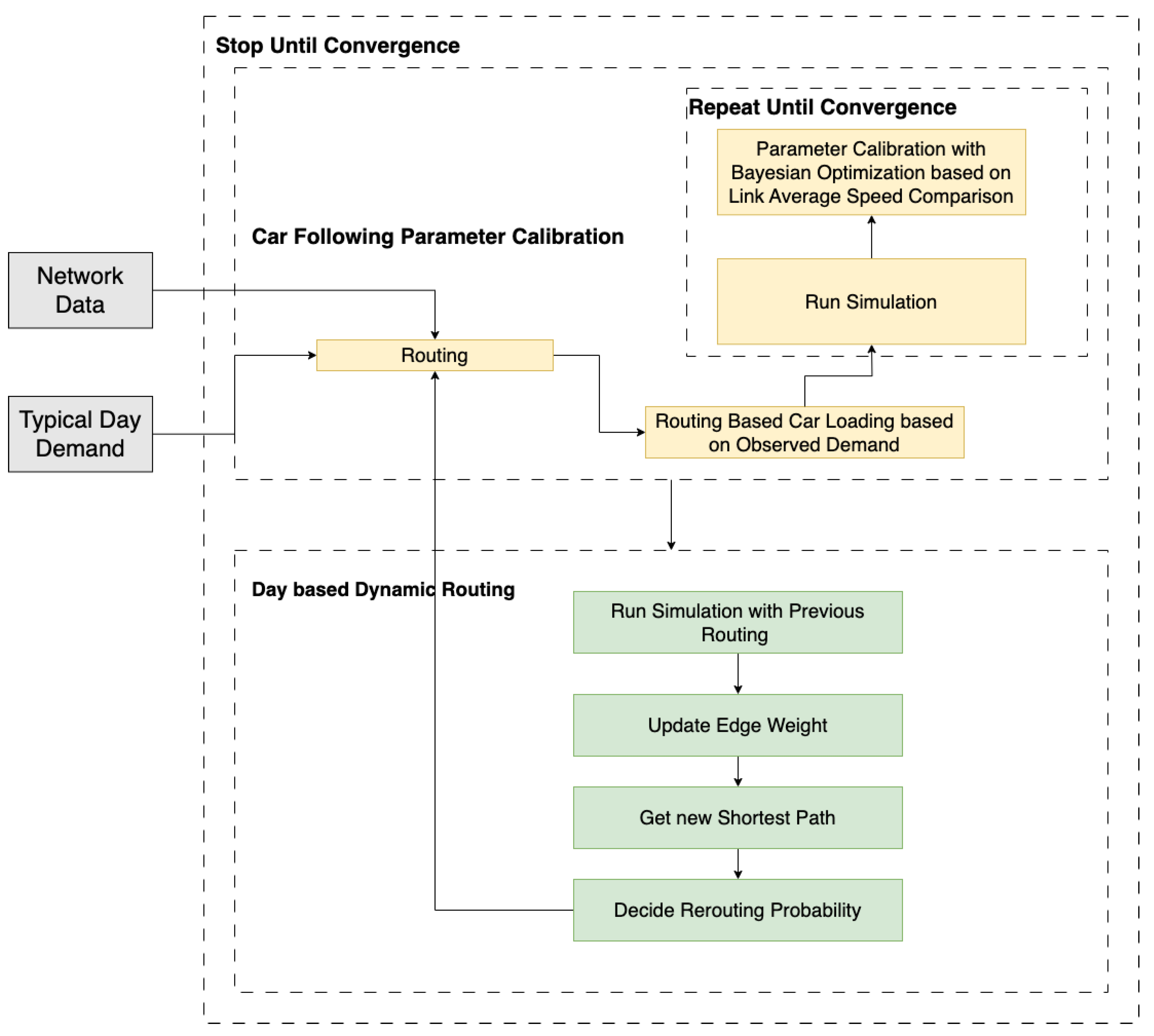
3. Calibration Framework
3.1. Framework Contents
3.2. Calibration Part A—Route Choice Behavior
| Algorithm 1 Routing Calibration Procedure in Outer Loop-Agent Level w |
| Input: t (Current Inner Loop Iteration), (Graph of the network with edges e and nodes n), (Free Flow Speed) Parameter: (Scaling factor for rerouting probability sensitivity), (Small positive constant to ensure numerical stability), (Travel Path of the agent on day ), (Travel Time on edge at day for all routes connecting the agent-specific OD pair in an hour), (Travel time of the agent on day ) Output: Route () based on previous experience and rerouting criteria
|
3.3. Calibration Part B—Car-Following Parameter
| Algorithm 2 Parameter Calibration for link e in the time interval at the t -th outer loop |
| Initialization-a: Flow density distribution at final simulation run at outer loop Initialization-b: Standard flow amount for link e at the time interval Initialization-c: Load the agents based on initialization a and b Optimization: Using Bayesian Optimization to iteratively update the parameters in the simulation system. (Surrogate Model: Gaussian Process; Acquisition function: Expectation Improvement) |
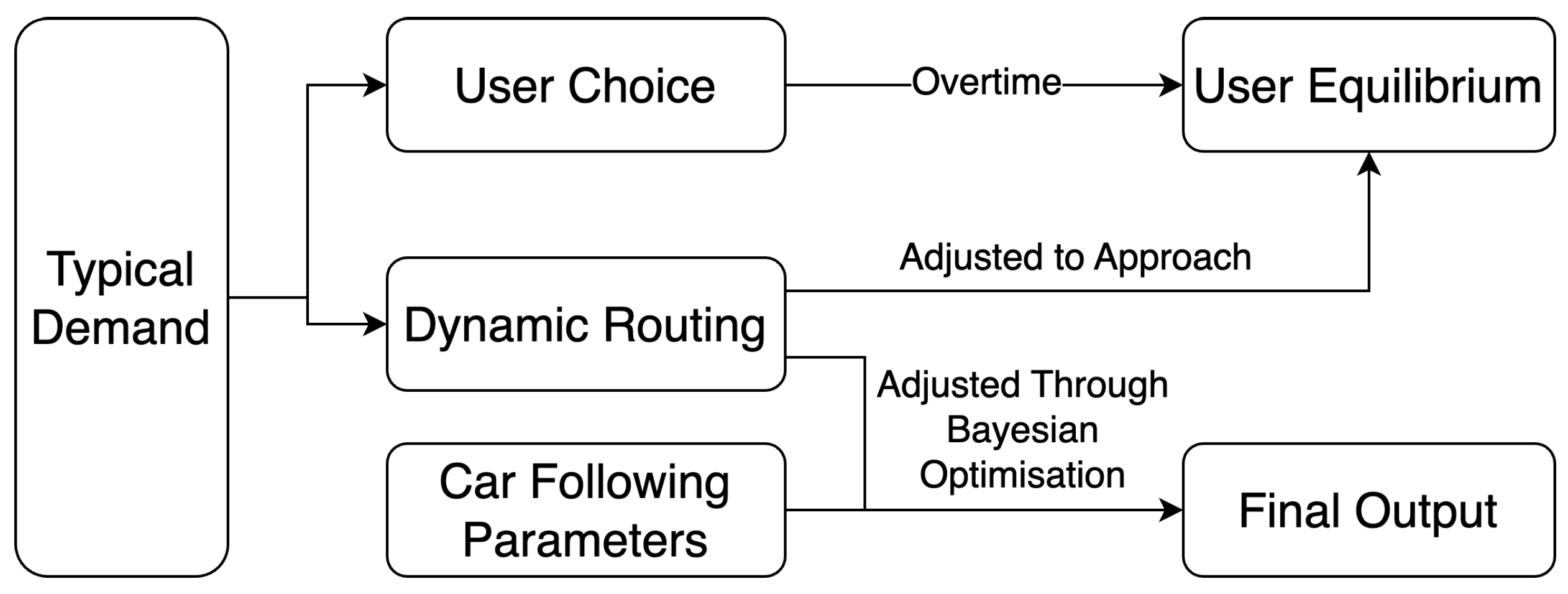
3.4. Further Discussion—Intuition Behind Framework Design
- Is the user equilibrium the best route choice for the simulator calibration?
- Can we use the route choice adjustment strategy to approach the ideal routing strategy which minimizes the gap of simulator output and the real data?
4. Experiment
4.1. Data Source
4.1.1. Demand Data
4.1.2. Flow Data
- F&P: Counts that were collected and passed to us.
- SFMTA: Counts obtained from tube detectors.
- Freeway performance measurement system (PeMS): 30 s loop detector data in California [49].
- CMP’s “multimodal counts data”: Our dataset is segmented into several time periods:
- –
- Early Morning (EA) from 3:00 a.m. to 6:00 a.m.;
- –
- Morning Peak (AM) from 6:00 a.m. to 9:00 a.m.;
- –
- Midday (MD) from 9:00 a.m. to 3:30 p.m.;
- –
- Afternoon Peak (PM) from 3:30 p.m. to 6:30 p.m.;
- –
- Evening (EV) from 6:30 p.m. to 3:00 a.m.
4.1.3. Link Average Speed Data
4.2. Practical Error Measure
4.3. Experiment Results
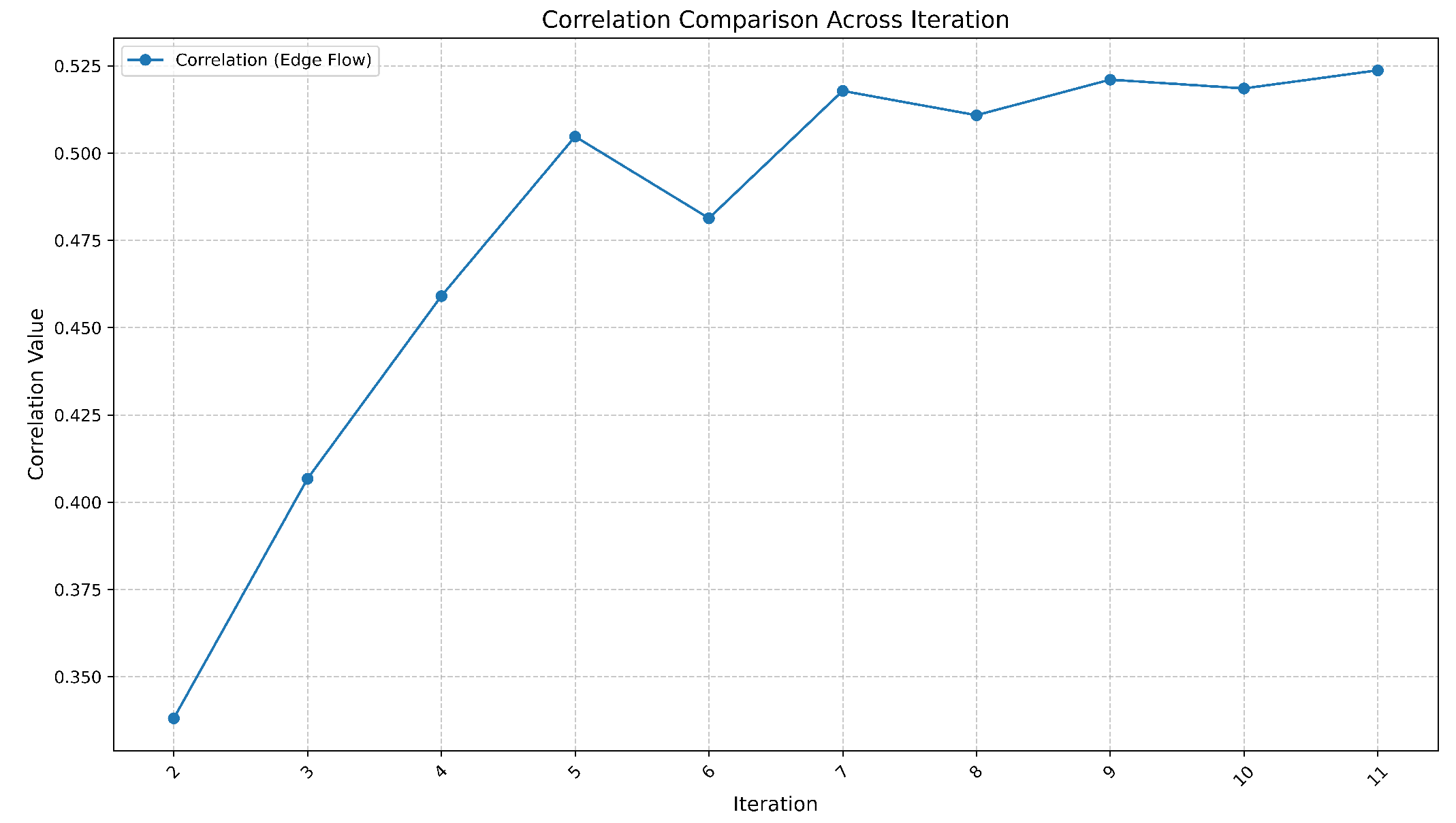
4.3.1. Flow Correlation
4.3.2. Speed Distribution Comparison
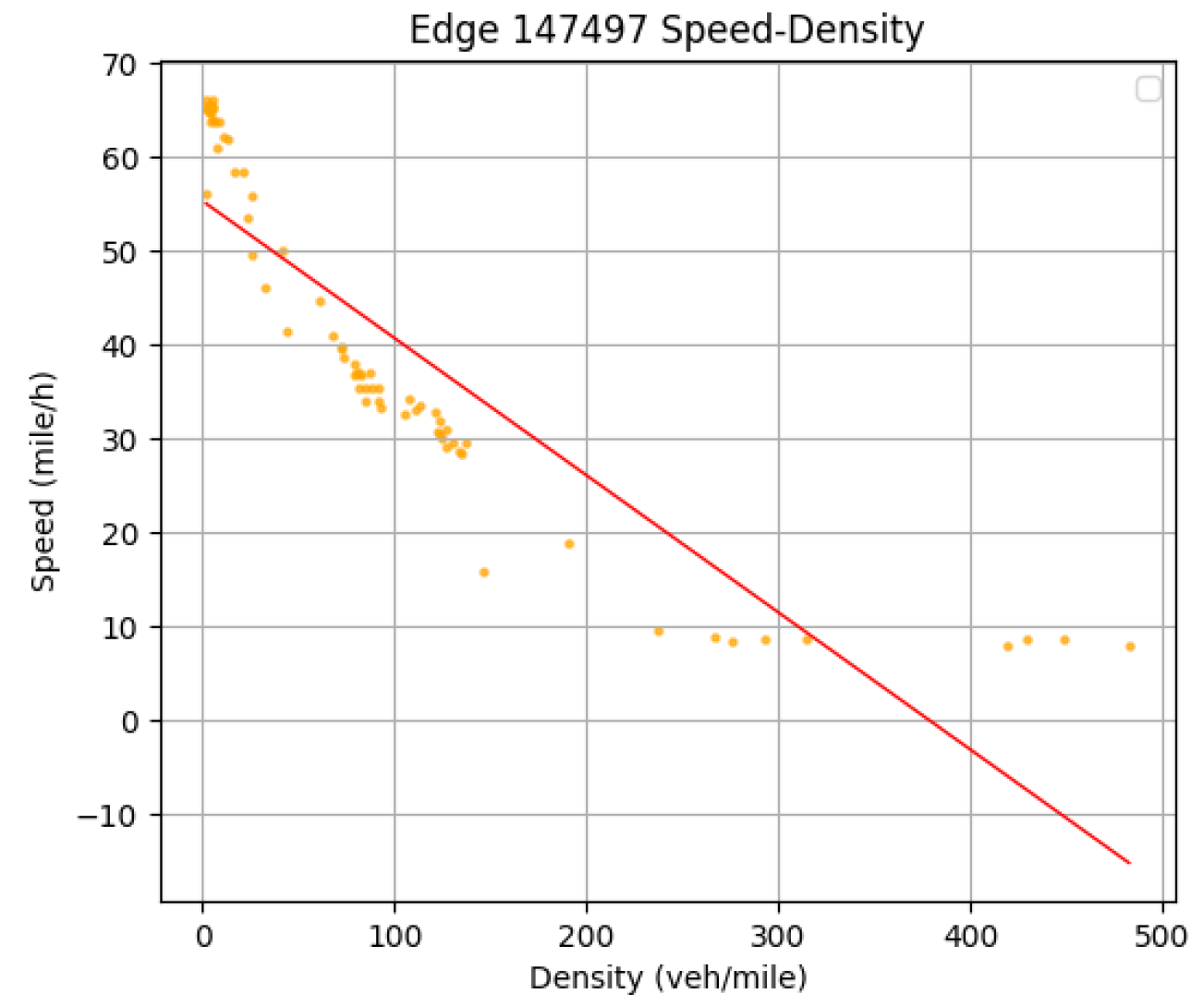
4.3.3. Link Fundamental Diagram (FD)
- The free-flow region is observed at densities below approximately 250 veh/mile, where flow increases almost linearly with density. This region reflects uncongested traffic conditions, where vehicles can travel at near-optimal speeds.
- The capacity point occurs at a density of approximately 250 veh/mile, with a maximum flow of around 4500 veh/h. This corresponds to the critical density, indicating the maximum throughput achievable on the link.
- Beyond this point, in the congested region, flow decreases as density increases. This indicates over-saturated traffic conditions, where vehicle interactions and reduced speeds dominate.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Description of the Example Large Scale Simulator
References
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO–simulation of urban mobility: An overview. In Proceedings of the SIMUL 2011, the Third International Conference on Advances in System Simulation, ThinkMind, Barcelona, Spain, 23–29 October 2011. [Google Scholar]
- Yedavalli, P.; Kumar, K.; Waddell, P. Microsimulation analysis for network traffic assignment (MANTA) at metropolitan-scale for agile transportation planning. Transp. A Transp. Sci. 2021, 18, 1278–1299. [Google Scholar] [CrossRef]
- Jiang, X.; Agerup, J.F.; Tang, Y. Benchmarking and Preparing LPSim for Scalability on Multiple GPUs; University of California: Berkeley, CA, USA, 2023. [Google Scholar]
- Archetti, C.; Speranza, M.G.; Weyland, D. A simulation study of an on-demand transportation system. Int. Trans. Oper. Res. 2018, 25, 1137–1161. [Google Scholar] [CrossRef]
- Esser, J.; Schreckenberg, M. Microscopic simulation of urban traffic based on cellular automata. Int. J. Mod. Phys. C 1997, 8, 1025–1036. [Google Scholar] [CrossRef]
- Huang, J.; Cui, Y.; Zhang, L.; Tong, W.; Shi, Y.; Liu, Z. An overview of agent-based models for transport simulation and analysis. J. Adv. Transp. 2022, 2022, 1252534. [Google Scholar] [CrossRef]
- Goyal, R.; Reiche, C.; Fernando, C.; Serrao, J.; Kimmel, S.; Cohen, A.; Shaheen, S. Urban Air Mobility (UAM) Market Study; NASA Technical Reports Server (NTRS): Washington, DC, USA, 2018; Volume 30. [Google Scholar]
- Sha, D.; Ozbay, K.; Ding, Y. Applying Bayesian optimization for calibration of transportation simulation models. Transp. Res. Rec. 2020, 2674, 215–228. [Google Scholar] [CrossRef]
- Tay, T.; Osorio, C. Bayesian optimization techniques for high-dimensional simulation-based transportation problems. Transp. Res. Part B Methodol. 2022, 164, 210–243. [Google Scholar] [CrossRef]
- Park, B.; Qi, H. Development and Evaluation of a Procedure for the Calibration of Simulation Models. Transp. Res. Rec. 2005, 1934, 208–217. [Google Scholar] [CrossRef]
- Li, L.; Chen, X.M.; Zhang, L. A global optimization algorithm for trajectory data based car-following model calibration. Transp. Res. Part C Emerg. Technol. 2016, 68, 311–332. [Google Scholar] [CrossRef]
- Ho, M.C.; Lim, J.M.Y.; Chong, C.Y.; Chua, K.K.; Siah, A.K.L. High dimensional origin destination calibration using metamodel assisted simultaneous perturbation stochastic approximation. IEEE Trans. Intell. Transp. Syst. 2023, 24, 3845–3854. [Google Scholar] [CrossRef]
- Monteil, J.; O’Hara, N.; Cahill, V.; Bouroche, M. Real-time estimation of drivers’ behaviour. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; IEEE: New York, NY, USA, 2015; pp. 2046–2052. [Google Scholar]
- Malu, M.; Dasarathy, G.; Spanias, A. Bayesian optimization in high-dimensional spaces: A brief survey. In Proceedings of the 2021 12th International Conference on Information, Intelligence, Systems & Applications (IISA), Chania Crete, Greece, 12–14 July 2021; IEEE: New York, NY, USA, 2021; pp. 1–8. [Google Scholar]
- Balakrishna, R.; Antoniou, C.; Ben-Akiva, M.; Koutsopoulos, H.N.; Wen, Y. Calibration of microscopic traffic simulation models: Methods and application. Transp. Res. Rec. 2007, 1999, 198–207. [Google Scholar] [CrossRef]
- Lee, J.B.; Ozbay, K. New calibration methodology for microscopic traffic simulation using enhanced simultaneous perturbation stochastic approximation approach. Transp. Res. Rec. 2009, 2124, 233–240. [Google Scholar] [CrossRef]
- Aghabayk, K.; Sarvi, M.; Young, W.; Kautzsch, L. A novel methodology for evolutionary calibration of Vissim by multi-threading. In Proceedings of the Australasian Transport Research Forum, Brisbane, Australia, 2–4 October 2013; Volume 36, pp. 1–15. [Google Scholar]
- Azevedo, C.L.; Ciuffo, B.; Cardoso, J.L.; Ben-Akiva, M.E. Dealing with uncertainty in detailed calibration of traffic simulation models for safety assessment. Transp. Res. Part C Emerg. Technol. 2015, 58, 395–412. [Google Scholar] [CrossRef]
- Chiappone, S.; Giuffrè, O.; Granà, A.; Mauro, R.; Sferlazza, A. Traffic simulation models calibration using speed–density relationship: An automated procedure based on genetic algorithm. Expert Syst. Appl. 2016, 44, 147–155. [Google Scholar] [CrossRef]
- Jiménez, D.; Muñoz, F.; Arias, S.; Hincapie, J. Software for calibration of transmodeler traffic microsimulation models. In Proceedings of the 2016 IEEE 19th International Conference on Intelligent Transportation Systems (ITSC), Rio de Janeiro, Brazil, 1–4 November 2016; IEEE: New York, NY, USA, 2016; pp. 1317–1323. [Google Scholar]
- Markou, I.; Papathanasopoulou, V.; Antoniou, C. Dynamic car–following model calibration using spsa and isres algorithms. Period. Polytech. Transp. Eng. 2019, 47, 146–156. [Google Scholar] [CrossRef]
- Schultz, L.; Sokolov, V. Practical Bayesian optimization for transportation simulators. arXiv 2018, arXiv:1810.03688. [Google Scholar]
- Ossen, S.; Hoogendoorn, S.P. Validity of trajectory-based calibration approach of car-following models in presence of measurement errors. Transp. Res. Rec. 2008, 2088, 117–125. [Google Scholar] [CrossRef]
- Sharma, A.; Zheng, Z.; Bhaskar, A. Is more always better? The impact of vehicular trajectory completeness on car-following model calibration and validation. Transp. Res. Part B Methodol. 2019, 120, 49–75. [Google Scholar] [CrossRef]
- Punzo, V.; Zheng, Z.; Montanino, M. About calibration of car-following dynamics of automated and human-driven vehicles: Methodology, guidelines and codes. Transp. Res. Part C Emerg. Technol. 2021, 128, 103165. [Google Scholar] [CrossRef]
- Kesting, A.; Treiber, M. Calibrating car-following models by using trajectory data: Methodological study. Transp. Res. Rec. 2008, 2088, 148–156. [Google Scholar] [CrossRef]
- Pourabdollah, M.; Bjärkvik, E.; Fürer, F.; Lindenberg, B.; Burgdorf, K. Calibration and evaluation of car following models using real-world driving data. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; IEEE: New York, NY, USA, 2017; pp. 1–6. [Google Scholar]
- Bertsekas, D. Dynamic behavior of shortest path routing algorithms for communication networks. IEEE Trans. Autom. Control 1982, 27, 60–74. [Google Scholar] [CrossRef]
- Fan, D.; Shi, P. Improvement of Dijkstra’s algorithm and its application in route planning. In Proceedings of the 2010 Seventh International Conference on Fuzzy Systems and Knowledge Discovery, Yantai, China, 10–12 August 2010; IEEE: New York, NY, USA, 2010; Volume 4, pp. 1901–1904. [Google Scholar]
- Ash, G.; Cardwell, R.H.; Murray, R. Design and optimization of networks with dynamic routing. Bell Syst. Tech. J. 1981, 60, 1787–1820. [Google Scholar] [CrossRef]
- Xiang, S.; Wang, L.; Xing, L.; Du, Y. An effective memetic algorithm for UAV routing and orientation under uncertain navigation environments. Memetic Comput. 2021, 13, 169–183. [Google Scholar] [CrossRef]
- Tyagi, N.; Singh, J.; Singh, S. A review of routing algorithms for intelligent route planning and path optimization in road navigation. In Recent Trends in Product Design and Intelligent Manufacturing Systems: Select Proceedings of IPDIMS 2021; Springer: Singapore, 2022; pp. 851–860. [Google Scholar]
- Peeta, S.; Ziliaskopoulos, A.K. Foundations of dynamic traffic assignment: The past, the present and the future. Netw. Spat. Econ. 2001, 1, 233–265. [Google Scholar] [CrossRef]
- Szeto, W.; Lo, H.K. Dynamic traffic assignment: Properties and extensions. Transportmetrica 2006, 2, 31–52. [Google Scholar] [CrossRef]
- Friesz, T.L.; Bernstein, D.; Smith, T.E.; Tobin, R.L.; Wie, B.W. A variational inequality formulation of the dynamic network user equilibrium problem. Oper. Res. 1993, 41, 179–191. [Google Scholar] [CrossRef]
- Cominetti, R.; Scarsini, M.; Schröder, M.; Stier-Moses, N. Approximation and convergence of large atomic congestion games. Math. Oper. Res. 2023, 48, 784–811. [Google Scholar] [CrossRef]
- Shou, Z.; Chen, X.; Fu, Y.; Di, X. Multi-agent reinforcement learning for Markov routing games: A new modeling paradigm for dynamic traffic assignment. Transp. Res. Part C Emerg. Technol. 2022, 137, 103560. [Google Scholar] [CrossRef]
- Zhang, K.; Mittal, A.; Djavadian, S.; Twumasi-Boakye, R.; Nie, Y.M. RIde-hail vehicle routing (RIVER) as a congestion game. Transp. Res. Part B Methodol. 2023, 177, 102819. [Google Scholar] [CrossRef]
- Frazier, P.I. A tutorial on Bayesian optimization. arXiv 2018, arXiv:1807.02811. [Google Scholar]
- Daulton, S.; Balandat, M.; Bakshy, E. Parallel bayesian optimization of multiple noisy objectives with expected hypervolume improvement. Adv. Neural Inf. Process. Syst. 2021, 34, 2187–2200. [Google Scholar]
- Zhao, X.; Wan, C.; Sun, H.; Xie, D.; Gao, Z. Dynamic rerouting behavior and its impact on dynamic traffic patterns. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2763–2779. [Google Scholar] [CrossRef]
- Mahmassani, H.S.; Liu, Y.H. Dynamics of commuting decision behaviour under advanced traveller information systems. Transp. Res. Part C Emerg. Technol. 1999, 7, 91–107. [Google Scholar] [CrossRef]
- Khattak, A.; Polydoropoulou, A.; Ben-Akiva, M. Modeling revealed and stated pretrip travel response to advanced traveler information systems. Transp. Res. Rec. 1996, 1537, 46–54. [Google Scholar] [CrossRef]
- Paz, A.; Peeta, S. Behavior-consistent real-time traffic routing under information provision. Transp. Res. Part C Emerg. Technol. 2009, 17, 642–661. [Google Scholar] [CrossRef]
- Ma, Z.; Shao, C.; Song, Y.; Chen, J. Driver response to information provided by variable message signs in Beijing. Transp. Res. Part F Traffic Psychol. Behav. 2014, 26, 199–209. [Google Scholar] [CrossRef]
- Bent, E.; Koehler, J.; Erhardt, G. Evaluating regional pricing strategies in San Francisco–application of the SFCTA activity-based regional pricing model. In Proceedings of the 89th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 10–14 January 2010. [Google Scholar]
- Outwater, M.L.; Charlton, B. The san francisco model in practice. Innov. Travel Demand Model. 2006, 24, 1–207. [Google Scholar]
- Chan, C.; Kuncheria, A.; Macfarlane, J. Simulating the Impact of Dynamic Rerouting on Metropolitan-Scale Traffic Systems. ACM Trans. Model. Comput. Simul. 2023, 33, 1–29. [Google Scholar] [CrossRef]
- Choe, T.; Skabardonis, A.; Varaiya, P. Freeway performance measurement system: Operational analysis tool. Transp. Res. Rec. 2002, 1811, 67–75. [Google Scholar] [CrossRef]
- Jiang, X.; Sengupta, R.; Demmel, J.; Williams, S. Large scale multi-GPU based parallel traffic simulation for accelerated traffic assignment and propagation. Transp. Res. Part C Emerg. Technol. 2024, 169, 104873. [Google Scholar] [CrossRef]
- Rüschendorf, L. The Wasserstein distance and approximation theorems. Probab. Theory Relat. Fields 1985, 70, 117–129. [Google Scholar] [CrossRef]
- Treiber, M.; Kesting, A. Traffic Flow Dynamics; Traffic Flow Dynamics: Data, Models and Simulation; Springer: Berlin/Heidelberg, Germany, 2013; pp. 983–1000. [Google Scholar]
- Iqbal, M.S.; Choudhury, C.F.; Wang, P.; González, M.C. Development of origin–destination matrices using mobile phone call data. Transp. Res. Part C Emerg. Technol. 2014, 40, 63–74. [Google Scholar] [CrossRef]
- Choudhury, C.F.; Ben-Akiva, M.E.; Toledo, T.; Lee, G.; Rao, A. Modeling cooperative lane changing and forced merging behavior. In Proceedings of the 86th Annual Meeting of the Transportation Research Board, Washington, DC, USA, 21–25 January 2007. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Authors | Network Scope | Measurement | Calibration Algorithm |
|---|---|---|---|
| Balakrishna et al. [15] | 2564 segments, 400+ OD | Flow | SPSA |
| Lee and Ozbay [16] | Small scale | Flow; speed; headway | Bayesian sampling; E-SPSA |
| Aghabayk et al. [17] | All scale (no experiment) | NA | Evolutionary algorithm |
| Azevedo et al. [18] | Urban motorway | Flow; speed; acceleration; deceleration; headway | Kriging, WSPSA |
| Chiappone et al. [19] | A22 Freeway | Speed–density relationship | Genetic algorithm |
| Jiménez et al. [20] | Pereira, Colombia (small scale) | GoF | Genetic algorithm |
| Markou et al. [21] | Naples, Italy (small scale) | Distance; speed | SPSA |
| Schultz and Sokolov [22] | POLARIS (small scale) | Travel time | Bayesian optimization; active subspace; deep neural networks |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, X.; Zhao, Y.; Jiang, C.; Cao, J.; Skabardonis, A.; Kurzhanskiy, A.; Sengupta, R. DRBO—A Regional Scale Simulator Calibration Framework Based on Day-to-Day Dynamic Routing and Bayesian Optimization. Smart Cities 2025, 8, 49. https://doi.org/10.3390/smartcities8020049
Jiang X, Zhao Y, Jiang C, Cao J, Skabardonis A, Kurzhanskiy A, Sengupta R. DRBO—A Regional Scale Simulator Calibration Framework Based on Day-to-Day Dynamic Routing and Bayesian Optimization. Smart Cities. 2025; 8(2):49. https://doi.org/10.3390/smartcities8020049
Chicago/Turabian StyleJiang, Xuan, Yibo Zhao, Chonghe Jiang, Junzhe Cao, Alexander Skabardonis, Alex Kurzhanskiy, and Raja Sengupta. 2025. "DRBO—A Regional Scale Simulator Calibration Framework Based on Day-to-Day Dynamic Routing and Bayesian Optimization" Smart Cities 8, no. 2: 49. https://doi.org/10.3390/smartcities8020049
APA StyleJiang, X., Zhao, Y., Jiang, C., Cao, J., Skabardonis, A., Kurzhanskiy, A., & Sengupta, R. (2025). DRBO—A Regional Scale Simulator Calibration Framework Based on Day-to-Day Dynamic Routing and Bayesian Optimization. Smart Cities, 8(2), 49. https://doi.org/10.3390/smartcities8020049