
A Review of Parking Slot Types and their Detection Techniques for Smart Cities

Abstract
:1. Introduction
1.1. Parallel Parking
1.2. Perpendicular Parking
1.3. Angled Parking
2. Related Work
3. Techniques of Parking Detection
3.1. Sensor-Based Techniques
3.1.1. Ultrasonic Sensors
3.1.2. Infrared Sensors
3.1.3. Magnetic Sensor
3.1.4. Inductive Loop Detector Sensors
3.1.5. Light Detection and Ranging (LiDAR)
3.1.6. Microwave Radio Detection and Ranging (Radar)
3.1.7. Radio Frequency Identification (RFID)
3.1.8. Anisotropic Magneto Resistance (AMR) Sensors
3.1.9. Piezoelectric Sensors
3.1.10. Microwave Radar Sensor
3.2. Position-Based Techniques
3.2.1. Surface-Mounted Sensors
3.2.2. Buried Sensors
3.2.3. Wireless Sensor
3.2.4. Multi-Level Sensors
- Accuracy: sensor-based systems can determine whether a vehicle is present or not with greater precision and reliability, and this is particularly important in low-light or adverse weather conditions.
- Consistency: sensor-based systems provide consistent results, regardless of lighting conditions or other external factors, and this makes them more reliable and predictable, and less prone to errors or false positives.
- Lower cost: sensor-based systems are generally less expensive, as they require fewer components and are easier to install and maintain.
- Integration with other technologies: other smart city technologies, such traffic management systems, can be easily integrated with sensor-based systems, to provide a more comprehensive and efficient solution for parking and transportation management.
3.3. Vision-Based Techniques
3.3.1. Object Detection Based
- YOLO (You Only Look Once) is a popular object detection algorithm that can detect objects in real time by dividing the image into a grid of cells and predicting the class and location of the object in each cell. YOLO can detect multiple objects in an image and has been applied to parking detection tasks with high accuracy and speed [52].
- SSD (Single Shot Detector) is a single-shot object identification system that uses several convolutional feature maps of various scales to predict the kind and location of objects. SSD can detect objects of different sizes and aspect ratios and has been applied to parking detection tasks with high accuracy and efficiency [53].
- Faster R-CNN is a state-of-the-art object detection algorithm that uses a region proposal network (RPN) to generate object proposals and a convolutional neural network (CNN) to classify the proposals and refine their bounding boxes. Faster R-CNN has shown promising results in detecting cars in parking lots, and it can handle different parking lot layouts, lighting conditions, and car orientations [54].
- RetinaNet is a recent object detection algorithm that uses a novel focal loss function to address the class imbalance problem in object detection tasks. RetinaNet can detect objects with high precision and recall and has been applied to parking detection tasks with promising results [55].
- Mask R-CNN is a variant of Faster R-CNN that can also predict object masks in addition to bounding boxes and class labels. Mask R-CNN has been applied to parking detection tasks to segment and track cars in parking lots [56]. To identify the presence of automobiles in parking places, they are frequently utilized in parking detection systems.
3.3.2. Background Subtraction Based
- Gaussian Mixture Model (GMM) is a widely used background subtraction algorithm that models the pixel intensities of the background as a mixture of Gaussian distributions. GMM can adapt to changes in the scene and can detect moving objects in real time. GMM has been applied to parking detection tasks to detect cars in parking lots and estimate parking space occupancy [57].
- Adaptive background subtraction methods update the background model continuously based on the current image and the previous background model. This method can handle gradual changes in the scene and can detect moving objects in real time. Adaptive background subtraction methods have been applied to parking detection tasks to detect cars in parking lots and estimate parking space occupancy [58].
- ViBe is a background subtraction algorithm that uses a pixel-based sampling strategy to detect moving objects in the scene. ViBe can learn the background model from a few frames and can detect objects with low computational cost. ViBe has been applied to parking detection tasks with promising results [59].
3.3.3. Feature Based
- Hough Transform is a feature-based approach that detects straight lines in the image. In parking detection tasks, Hough Transform can be used to detect the edges of parking spaces and estimate their orientation and position. Hough Transform can also be combined with other techniques such as color segmentation and contour detection to improve its accuracy and robustness [60].
- Haar-like features are rectangular features that can be used to detect edges and corners in the image. Haar-like features have been applied to parking detection tasks to detect parking spaces and estimate their occupancy. Haar-like features can also be combined with machine learning techniques such as AdaBoost and SVM to improve their accuracy and efficiency [61].
- Local Binary Patterns (LBP) is a texture-based feature extraction method that can detect local patterns in the image. LBP can be used to detect the texture of parking spaces and estimate their occupancy. LBP can be combined with other techniques such as edge detection and clustering to improve its accuracy and robustness [62].
- Scale-Invariant Feature Transform (SIFT) is a feature extraction technique that can find and match important image points. SIFT can be used to detect the corners and edges of parking spaces and estimate their occupancy. SIFT can be combined with other techniques such as contour detection and clustering to improve its accuracy and robustness [63].
3.3.4. Deep Learning Based
- Deep convolutional neural networks (DCNNs) are a type of neural network that can be used for parking detection tasks. DCNNs use multiple layers of convolutional filters to extract features from the input image and predict the occupancy of parking spaces. DCNNs can be trained on large datasets of parking lot images to improve their accuracy and robustness [64].
- Transfer learning is a technique that involves a pre-trained neural network model for parking detection tasks. Transfer learning can be used to leverage the knowledge learned by the pre-trained model on large datasets of images and apply it to parking detection tasks. Transfer learning can be used with various neural network models including VGGNet, ResNet, and InceptionNet [65].
- More detailed information: Vision-based systems can provide more detailed information about the parking environment, such as the type of vehicle, its orientation, and its license plate number. This information can be valuable for parking management and enforcement purposes.
- Greater flexibility: Vision-based systems can be more flexible and adaptable to changing environments or different parking scenarios. For example, they can detect multiple vehicles in the same parking space or detect vehicles parked in non-designated areas.
- More accurate in certain scenarios: vision-based systems can be more accurate in certain scenarios, such as detecting vehicles parked partially outside of a designated parking space or detecting motorcycles or bicycles.
- Higher resolution: vision-based systems can provide higher resolution images or video feeds, which can be used for additional applications, such as security or surveillance.
- Easy installation: Vision-based systems require minimal physical installation, as they can be mounted on existing infrastructure or deployed using mobile units. This can make them more cost-effective and easier to install than sensor-based systems.
- Visual data input: image-based parking systems rely on visual data captured by cameras or dashcams installed in parking areas.
- Machine learning algorithms: these systems often employ machine learning algorithms, such as convolutional neural networks (CNNs), for object detection and recognition.
- Dataset requirements: training image-based parking systems typically require large and diverse datasets of parking scenarios to achieve accurate results.
- Real-time processing: some image-based systems are capable of real-time image analysis to detect parking space availability.
- Object detection: they are effective at detecting various objects in parking lots, including vehicles, pedestrians, and obstacles.
- High-resolution images: image-based systems can provide high-resolution images, allowing for detailed analysis of parking spaces and their surroundings.
- Detailed information: These systems can offer detailed information about the parking environment, including vehicle type, orientation, and even license plate recognition.
- Flexibility: they can adapt to changing environments, handle multiple vehicles in the same space, and detect vehicles parked outside designated areas.
- Accuracy: image-based systems can be highly accurate in various scenarios, including detecting vehicles partially outside designated spaces or identifying smaller vehicles like motorcycles and bicycles.
- Ease of installation: they require minimal physical installation, often using existing infrastructure or mobile units.
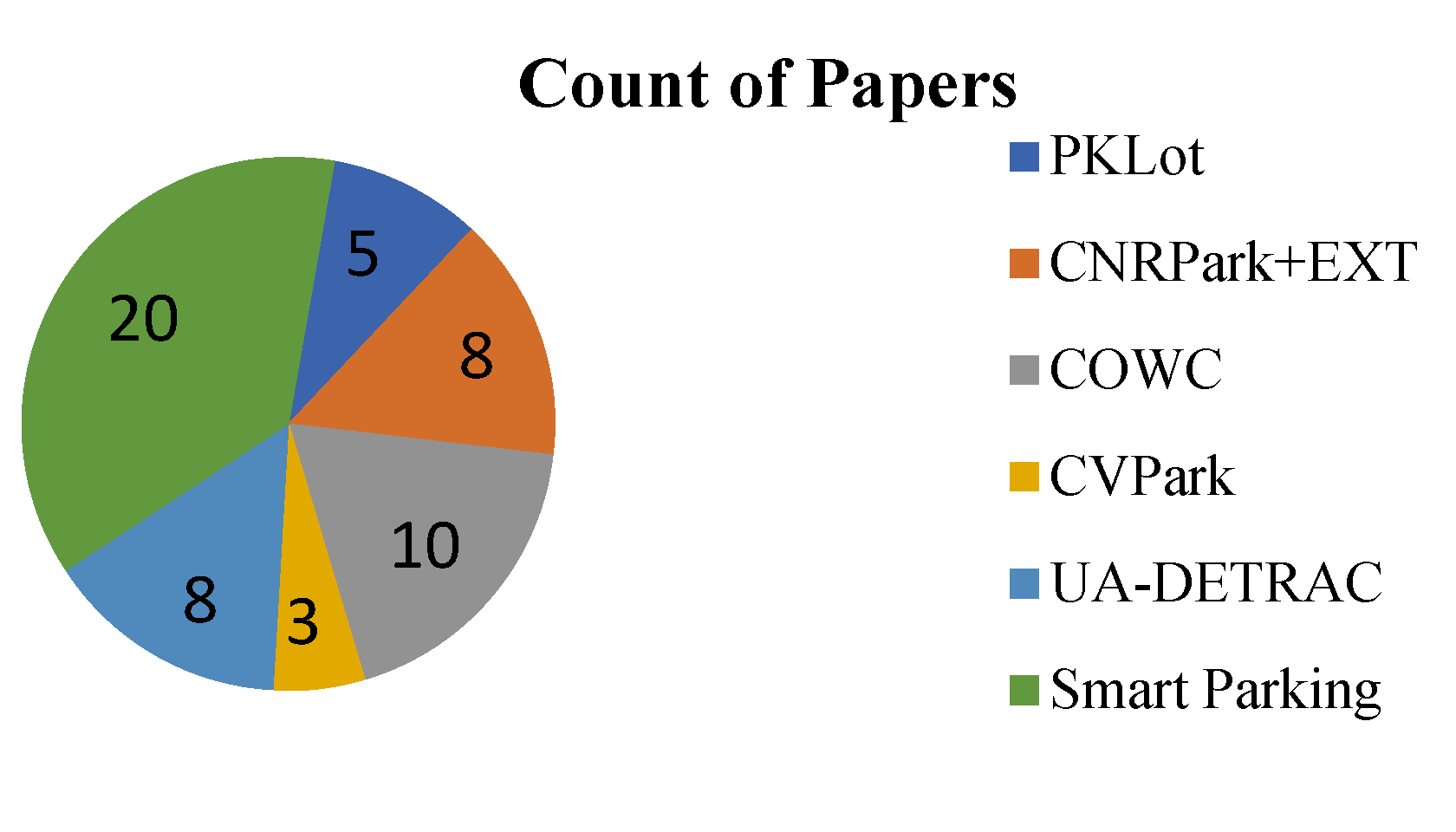
4. Parking Datasets
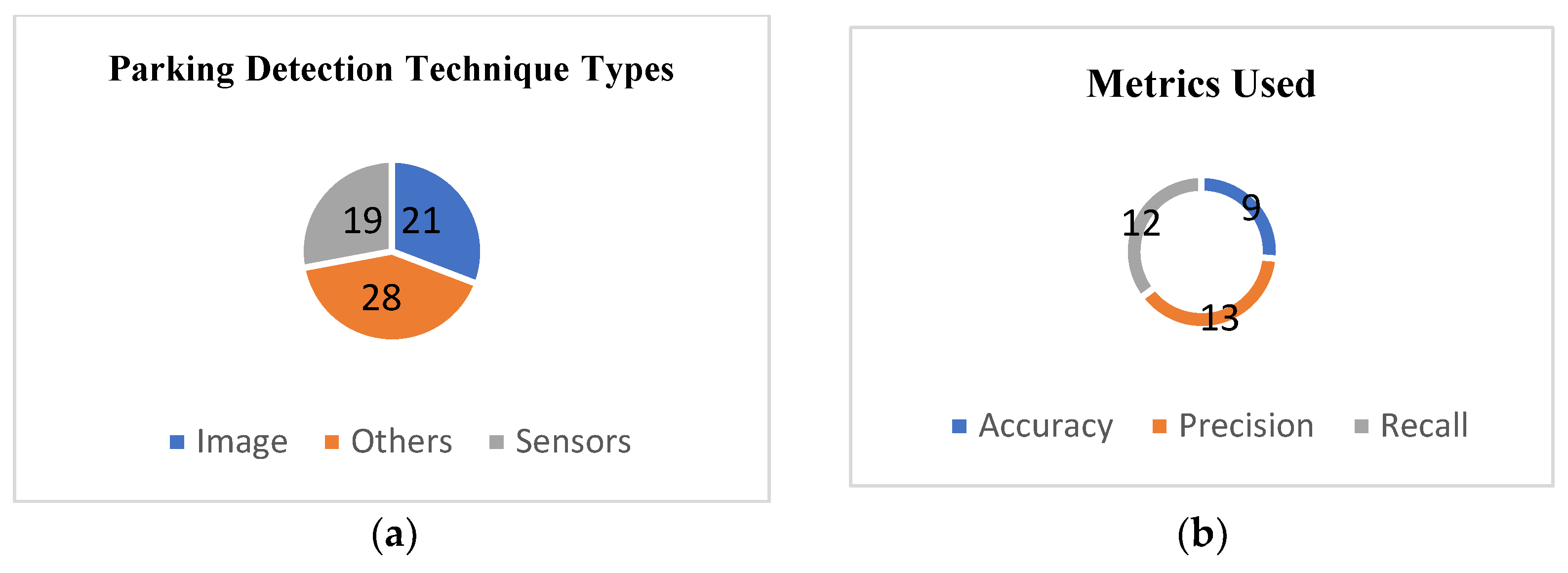
- Accuracy: Accuracy measures the overall correctness of the parking detection system’s predictions. It quantifies the percentage of correct predictions out of all predictions made. A higher accuracy score indicates a more reliable system.
- Precision: Precision evaluates the system’s ability to make correct positive predictions. It quantifies the percentage of true positive predictions out of all positive predictions made. A higher precision score suggests that the system minimizes false alarms, making it suitable for applications where false positives are costly.
- Recall: Recall, also known as sensitivity or true positive rate, assesses the system’s ability to correctly identify all positive instances. It quantifies the percentage of true positive predictions out of all actual positive instances. A higher recall score is crucial when it is essential to minimize false negatives, ensuring that no parking spaces are overlooked.
5. Automatic Parking
- Automated parking facility (APF): The goal of an automated (car) parking system (APS) is to minimize the amount of space and volume required to park cars. In order to increase parking places while using the least amount of land possible, an APS offers parking for cars on many floors stacked vertically [66].
- Mechanical parking: Mechanical parking refers to a parking system that uses techniques like multi-story garages, automated parking systems, stack parking, etc., to reduce the overall amount of space needed to park the vehicles. These techniques are typically powered by hydraulic or electrical devices [67].
- Car parking system: A car parking system is a mechanical device that increases the number of parking spaces in a lot. Electric motors or hydraulic pumps are frequently used to power parking systems, which move cars into a storage position. In comparison to a conventional facility with the same capacity, automatic multi-story automated car park systems are less expensive per parking space, likely to require less building volume, and typically require less ground area [68].
- Robotic parking garage: PSs are helpful because they help preserve space, enabling more cars to fit in a compact place. This is particularly true for parking systems that run completely automatically and do not require personnel to park cars. Each vehicle can be parked nearer to the following one because no one will need to exit their vehicles [69]. This technology combines sensors, radars, and cameras to assume autonomous control of certain parking chores or the entire parking exercise, allowing drivers safely and securely store their vehicle without damaging it or other automobiles parked nearby [70].
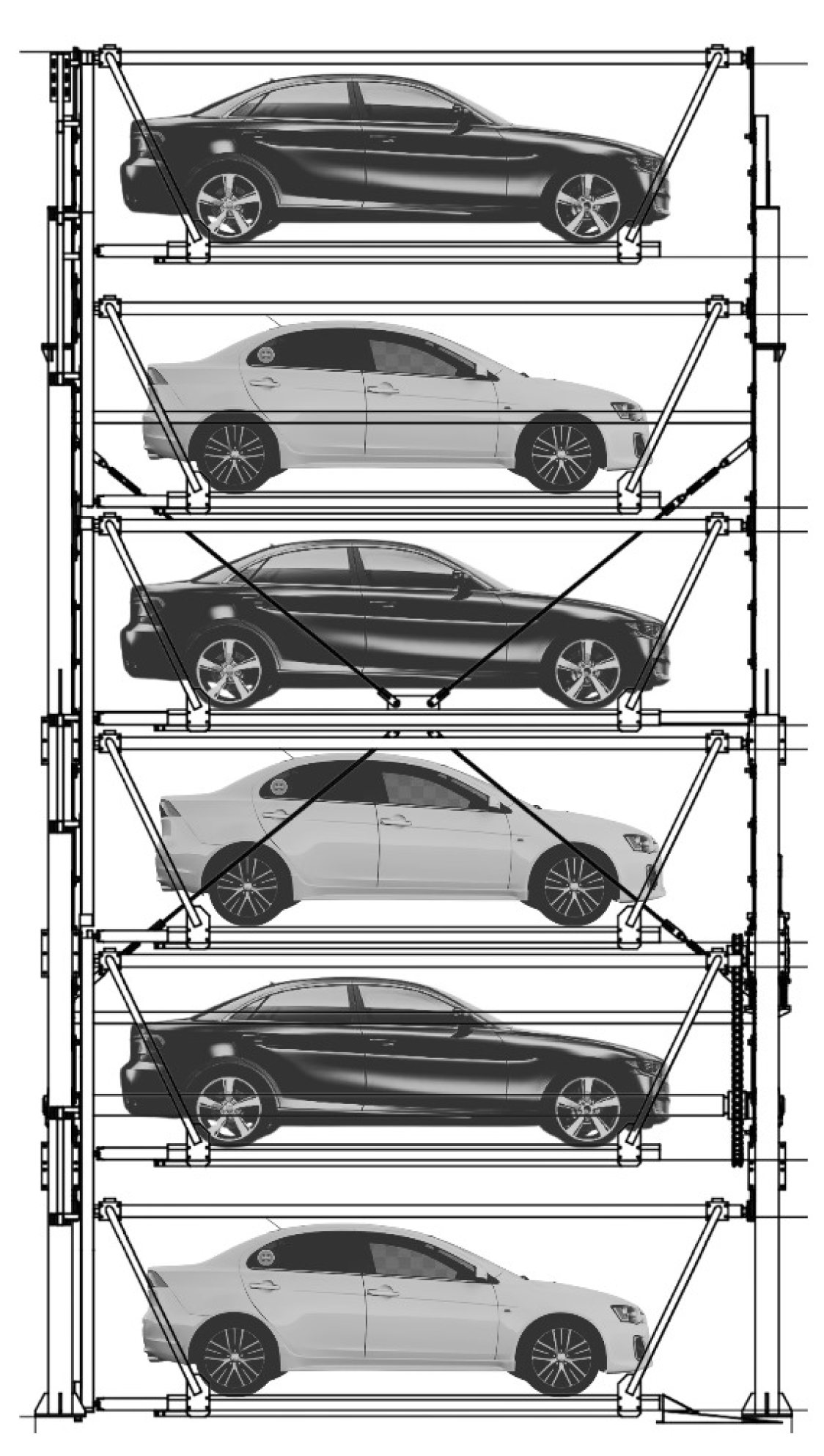
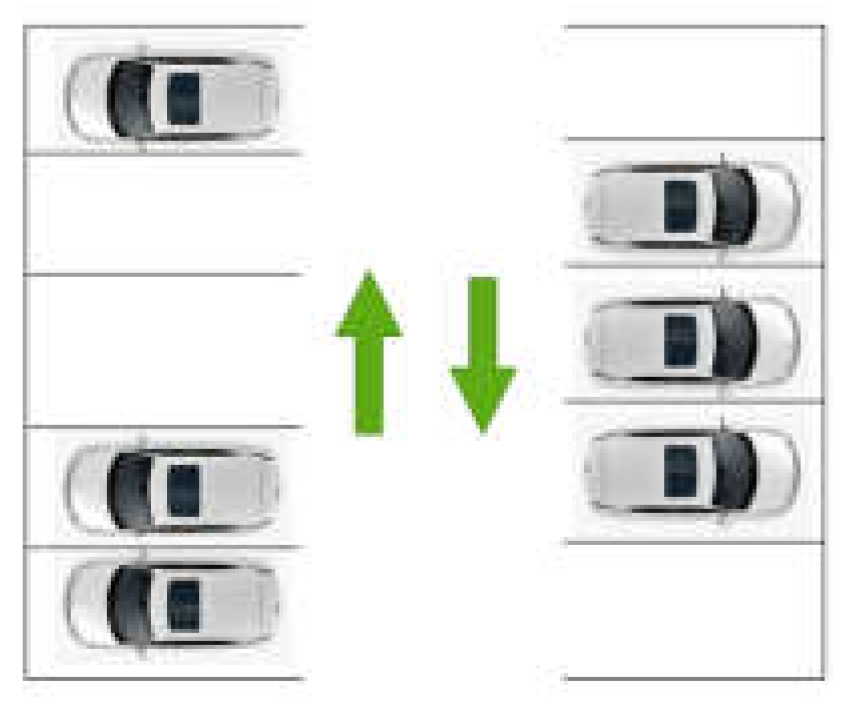
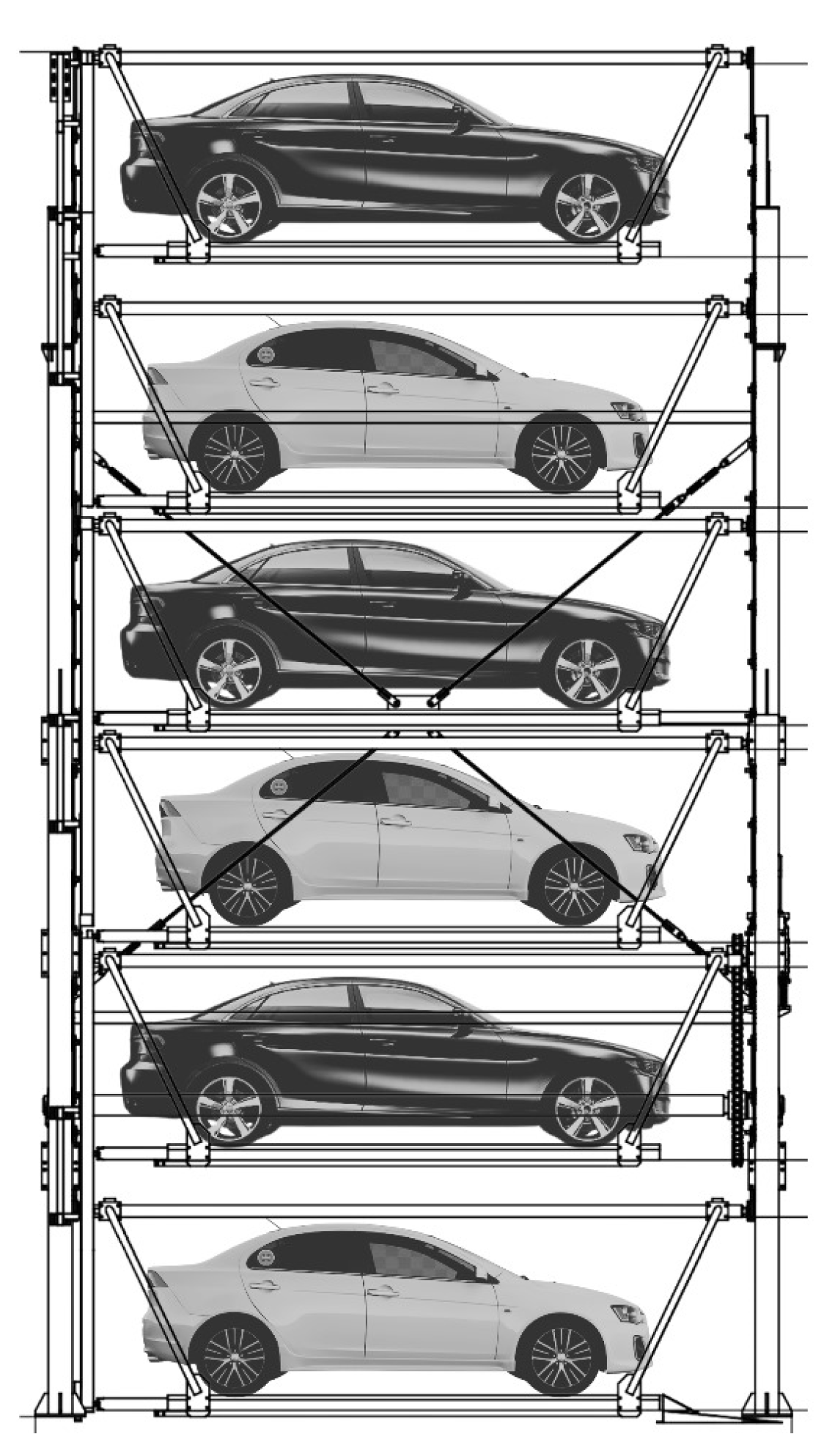
- Shuttle parking system: Using self-driving shuttles and lifts, this type of parking system parks and retrieves vehicles. Using the pallet exchanger or conveyor belts on the shuttle, the car is then transferred from the shuttle to the parking space, and vice versa, before being parked or picked up at the agreed location [71]. The shuttles store vehicles on racks that are perpendicular to the fixed rails on both sides while moving horizontally along fixed tracks in a single direction. Construction of the structure uses either concrete or steel racking [72]. Typically serving bigger parking capacities, shuttle systems span from single level to multi-level. The parking system is only suitable for basement and outdoor parking. In this system, the car pulls up to the lift’s ground floor entrance. The car is taken to the floor by the elevator [73]. In order to pick up the automobile from the lift and deliver it to the assigned parking places, there is at least one shuttle on each floor. The representation of the shuttle parking system is shown in Figure 7.
- Puzzle parking system: Jigsaw parking is a semi-automated method for parking and retrieving vehicles that uses combination pallets to move parking spaces both horizontally and vertically. It is a standalone parking system that can be easily customized to meet any property needs [74]. The number of parking places in a parking lot is increased by a mechanical part of the system. Electric motors or hydraulic pumps are frequently used in these parking systems to move vehicles into storage positions. This approach is suitable for parking outside. Matrix comparisons are used to separate these parking types. This is how the car pulls into the ground level parking slot. After that, the automobile is lowered into the lift using a car pickup pallet. The lift transports the car to various floors. To take the car from the lift and place it in the specified bays, there is at least one shuttle accessible on each floor. The entry and exit is from ground level. The representation of puzzle parking system is shown in Figure 8 [75].
- Rotary parking system: Due to the circular parking structure, more than two cars can fit in the horizontal space. The building can house six automobiles in two spaces and, depending on the needs of the user, it can be modified to hold a greater number. For areas with little space, it is a practical solution. The automobile approaches the parking space on the ground floor in this configuration. Then, all the cars are turned in a clockwise direction until the first floor has an empty bay. Until the desired vehicle is at ground level, all the cars are turned clockwise to unload them. The driver now exits the system in order for the next car to be loaded or another car to be emptied [76]. Figure 9 shows the representation of rotary parking system [77].
- Stacker parking system: Instead of using a pallet, the stacker parking system uses a moving object called a “stacker” and offers short access and exit times for cars. The operation of this system is very similar to that of older ones, which is very convenient for the driver. Simultaneous vertical and horizontal movement can significantly shorten the time it takes to get in and out of the car. A robotic gadget moves the car to and from the lift/parking bay by pushing and pulling it [78].
- Automated guided vehicle (AGV) parking system: The AGV Parking System is meant to be put in the enclosed parking vault. This parking system can be constructed in a variety of conventional and unconventional configurations. It makes use of a number of levels above, on, and below slope to increase parking efficiency [79]. A mono-path system, which is limited to one lane of lateral movement along a steel rail, operates differently from this based system. AGV systems employ software technologies in order to move effortlessly over solid concrete slabs and around obstructions. This allows for quicker retrieval [80]. The technology will operate on solid polished concrete floors. It can move in both lengthwise and sideways directions along predetermined courses, as well as quickly rotate. AGVs drive beneath the vehicle platform in transfer cabins where vehicles are parked on platforms. They then elevate the platform, move it from the cabin into the system, and lower it. Warehouses that need automation are among its applications [81].
- Rail guided parking system: Vehicles are placed on pallets and positioned in parking modules. RGCs drive beneath the vehicle pallet, lift it, and then move the vehicle to move it from a parking module and into the system. The RGC may move side-to-side as well as forward and backward. RGC systems function effectively on firm concrete surfaces and can move longitudinally and laterally through tiny guide rails put on the floor [82,83,84].
- Crane parking system: Crane-parking systems in multi-level systems carry out the vertical journey with a distinct lift component. A single mechanism can move the vehicle that needs to be parked or retrieved both horizontally and vertically at the same time. The crane moves along tracks that stretch down the center aisle and are mounted to the floor and ceiling. The crane mechanism moves horizontally on rails that are typically situated on the floor and ceiling of the parking system [36]. Vehicles that need to be parked and picked up are positioned on a newly constructed vertical lift platform. The system’s main benefit for quickly arranging objects is the crane’s ability to move in both the up–down and left–right directions at the same time.
- Silo parking system: The single, centrally positioned parking and retrieval mechanism is a feature of cylindrical silo systems. Parking lots for automobiles surround the center. One vehicle can only be manipulated at a time because the lifting/rotating mechanism that occupies the core and completes the positioning. Simultaneous axial and up/down placement is possible with silo mechanisms, which can move the vehicles swiftly [37]. Parking silos can also be erected above ground; however, they are best suited for locations with extremely poor soil conditions. While typically just one automobile can be parked or retrieved at a time, silo systems allow the use of one or more parking modules.
6. Comparative Study
- Automation levels: Parking techniques have been divided into groups based on how automated they are, from low to high. High degrees of automation, such as those found in stacker parking and automated garages, have the ability to maximize space utilization but also come at a higher expense and with more complexity.
- Space efficient parking: The space efficiency of various parking techniques varies. In heavily crowded metropolitan locations, multi-level and AGV parking systems are desirable solutions since they are excellent space optimizers.
- Cost factors: The expenses involved in implementing each parking solution vary greatly. When compared to automated garages and AGV parking, rotary parking and silo parking are more reasonably priced.
- Installation difficulty: These approaches vary in terms of how difficult they are to deploy, with some, like puzzle parking, enabling simpler deployment. Advanced functionalities can be provided by higher complexity systems like rail guided and crane parking.
- Flexibility: We evaluated how well these techniques might be tailored to various parking conditions. Others, like puzzle parking, provide a more moderate level of versatility, while some, like multi-level parking, may have limited adaptability.
- AI and IoT integration: To increase the effectiveness of smart parking systems, future research should examine how AI and the Internet of Things (IoT) may be combined. Real-time insights for improved parking management can be obtained using IoT-enabled sensors and AI-driven predictive analytics.
- Sustainability and green parking: Researching the environmental effects of various parking strategies and coming up with eco-friendly solutions has to be a top concern.
- User experience and accessibility: This involves creating intuitive mobile applications, direction systems, and accessible features for people with special needs.
- Security and privacy: Security and privacy issues are raised as a result of the collection and processing of data using smart parking systems. For smart parking solutions that are to be widely used, it will be essential to look into reliable security measures and ensure data protection.
- Urban planning and policy: To create standards and laws that make it easier to integrate smart parking systems into municipal infrastructure, researchers should work with urban planners and lawmakers.
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Nyambal, J.; Klein, R. Automated parking space detection using convolutional neural networks. In Proceedings of the 2017 Pattern Recognition Association of South Africa and Robotics and Mechatronics (PRASA-RobMech), Bloemfontein, South Africa, 30 November 2017–1 December 2017; pp. 1–6. [Google Scholar]
- Wu, M.C.; Yeh, M.C. Early detection of vacant parking spaces using dashcam videos. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, No. 01. pp. 9613–9618. [Google Scholar]
- Gkolias, K.; Vlahogianni, E.I. Convolutional neural networks for on-street parking space detection in urban networks. IEEE Trans. Intell. Transp. Syst. 2018, 20, 4318–4327. [Google Scholar] [CrossRef]
- Yang, K.; Hu, X.; Bergasa, L.M.; Romera, E.; Wang, K. Pass: Panoramic annular semantic segmentation. IEEE Trans. Intell. Transp. Syst. 2019, 21, 4171–4185. [Google Scholar] [CrossRef]
- Min, C.; Xu, J.; Xiao, L.; Zhao, D.; Nie, Y.; Dai, B. Attentional graph neural network for parking-slot detection. IEEE Robot. Autom. Lett. 2021, 6, 3445–3450. [Google Scholar] [CrossRef]
- Li, W.; Cao, L.; Yan, L.; Liao, J.; Wang, Z. Vacant parking slot detection and tracking during driving and parking with a standalone around view monitor. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 1539–1551. [Google Scholar] [CrossRef]
- Chun, S.; Kim, J.S.; Yoo, Y.; Choi, Y.; Jung, S.J.; Jang, D.; Lee, G.; Song, K.-I.; Nam, K.S.; Youn, I.; et al. An artificial neural tactile sensing system. Nat. Electron. 2021, 4, 429–438. [Google Scholar] [CrossRef]
- Biyik, C.; Allam, Z.; Pieri, G.; Moroni, D.; O’fraifer, M.; O’Connell, E.; Olariu, S.; Khalid, M. Smart parking systems: Reviewing the literature, architecture and ways forward. Smart Cities 2021, 4, 623–642. [Google Scholar] [CrossRef]
- Khalid, M.; Wang, K.; Aslam, N.; Cao, Y.; Ahmad, N.; Khan, M.K. From smart parking towards autonomous valet parking: A survey, challenges and future Works. J. Netw. Comput. Appl. 2021, 175, 102935. [Google Scholar] [CrossRef]
- Do, H.; Choi, J.Y. Context-based parking slot detection with a realistic dataset. IEEE Access 2020, 8, 171551–171559. [Google Scholar] [CrossRef]
- Amato, G.; Carrara, F.; Falchi, F.; Gennaro, C.; Vairo, C. Car parking occupancy detection using smart camera networks and deep learning. In Proceedings of the 2016 IEEE Symposium on Computers and Communication (ISCC), Messina, Italy, 27–30 June 2016; pp. 1212–1217. [Google Scholar]
- Chen, J.; Zhang, L.; Shen, Y.; Ma, Y.; Zhao, S.; Zhou, Y. A study of parking-slot detection with the aid of pixel-level domain adaptation. In Proceedings of the 2020 IEEE International Conference on Multimedia and Expo (ICME), London, UK, 6–10 July 2020; pp. 1–6. [Google Scholar]
- Zhang, L.; Huang, J.; Li, X.; Xiong, L. Vision-based parking-slot detection: A DCNN-based approach and a large-scale benchmark dataset. IEEE Trans. Image Process. 2018, 27, 5350–5364. [Google Scholar] [CrossRef]
- Yu, Z.; Gao, Z.; Chen, H.; Huang, Y. SPFCN: Select and prune the fully convolutional networks for real-time parking slot detection. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; pp. 445–450. [Google Scholar]
- Huang, J.; Zhang, L.; Shen, Y.; Zhang, H.; Zhao, S.; Yang, Y. DMPR-PS: A novel approach for parking-slot detection using directional marking-point regression. In Proceedings of the 2019 IEEE International Conference on Multimedia and Expo (ICME), Shanghai, China, 8–12 July 2019; pp. 212–217. [Google Scholar]
- Zinelli, A.; Musto, L.; Pizzati, F. A deep-learning approach for parking slot detection on surround-view images. In Proceedings of the 2019 IEEE intelligent vehicles symposium (IV), Paris, France, 9–12 June 2019; pp. 683–688. [Google Scholar]
- Xu, C.; Hu, X. Real time detection algorithm of parking slot based on deep learning and fisheye image. J. Phys. Conf. Ser. 2020, 1518, 012037. [Google Scholar] [CrossRef]
- Suhr, J.K.; Jung, H.G. End-to-end trainable one-stage parking slot detection integrating global and local information. IEEE Trans. Intell. Transp. Syst. 2021, 23, 4570–4582. [Google Scholar] [CrossRef]
- Wu, Y.; Yang, T.; Zhao, J.; Guan, L.; Jiang, W. VH-HFCN based parking slot and lane markings segmentation on panoramic surround view. In Proceedings of the 2018 IEEE Intelligent Vehicles Symposium (IV), Changshu, China, 26–30 June 2018; pp. 1767–1772. [Google Scholar]
- Poddar, D.; Nagori, S.; Mathew, M.; Maji, D.; Garud, H. Deep learning based parking spot detection and classification in fish-eye images. In Proceedings of the 2019 IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 26–27 July 2019; pp. 1–5. [Google Scholar]
- Zhang, C.; Du, B. Image-based approach for parking-spot detection with occlusion handling. J. Transp. Eng. Part A Syst. 2020, 146, 04020098. [Google Scholar] [CrossRef]
- Chen, Z.; Qiu, J.; Sheng, B.; Li, P.; Wu, E. GPSD: Generative parking spot detection using multi-clue recovery model. Vis. Comput. 2021, 37, 2657–2669. [Google Scholar] [CrossRef]
- Athira, A.; Lekshmi, S.; Vijayan, P.; Kurian, B. Smart parking system based on optical character recognition. In Proceedings of the 2019 3rd International Conference on Trends in Electronics and Informatics (ICOEI), Tirunelveli, India, 23–25 April 2019; pp. 1184–1188. [Google Scholar]
- Bacchiani, G.; Patander, M.; Cionini, A.; Giaquinto, D. Parking slots detection on the equivalence sphere with a progressive probabilistic Hough transform. In Proceedings of the 2017 IEEE 20th International Conference on Intelligent Transportation Systems (ITSC), Yokohama, Japan, 16–19 October 2017; pp. 1–6. [Google Scholar]
- Hamada, K.; Hu, Z.; Fan, M.; Chen, H. Surround view based parking lot detection and tracking. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 29 June–1 July 2015; pp. 1106–1111. [Google Scholar]
- Jung, H.G.; Lee, Y.H.; Kim, J. Uniform user interface for semiautomatic parking slot marking recognition. IEEE Trans. Veh. Technol. 2009, 59, 616–626. [Google Scholar] [CrossRef]
- Jian, D.H.; Lin, C.H. Vision-based parking slot detection based on end-to-end semantic segmentation training. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 4–6 January 2020; pp. 1–4. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. Ssd: Single Shot Multibox Detector. Computer Vision—ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Springer: Cham, Switzerland, 2016; pp. 21–37. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the Proceedings of the IEEE conference on computer vision and pattern recognition, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 779–788. [Google Scholar]
- Wang, R.J.; Li, X.; Ling, C.X. Pelee: A real-time object detection system on mobile devices. Adv. Neural Inf. Process. Syst. 2018, 31. [Google Scholar]
- Lou, L.; Zhang, J.; Xiong, Y.; Jin, Y. An Improved Roadside Parking Space Occupancy Detection Method Based on Magnetic Sensors and Wireless Signal Strength. Sensors 2019, 19, 2348. [Google Scholar] [CrossRef]
- Cheung, S.Y.; Ergen, S.C.; Varaiya, P. Traffic surveillance with wireless magnetic sensors. In Proceedings of the 12th ITS world congress, San Francisco, CA, USA, 6–10 November 2005; Volume 1917. [Google Scholar]
- Abd Kadir, M.M.; Osman, M.N.; Othman, N.A.; Sedek, K.A. IoT based car parking management system using IR sensor. J. Comput. Res. Innov. (JCRINN) 2020, 5, 75–84. [Google Scholar] [CrossRef]
- Meenaloshini, M.; Ilakkiya, J.; Sharmila, P.; Malar, J.S.; Nithyasri, S. Smart Car Parking System in Smart Cities Using IR. In Proceedings of the International Conference on Computing and Communications Technologies, Chennai, India, 21–22 February 2019. [Google Scholar] [CrossRef]
- Pavan, V.S.; Nishanth, N.V.; Kathirvelan, J. Automation of vehicular parking using loop detector with single lane traffic: A design approach. Int. J. Eng. Technol. 2013, 5, 2471–2475. [Google Scholar]
- Abidin, M.Z.; Pulungan, R. A systematic review of machine-vision-based smart parking systems. Sci. J. Inform. 2020, 7, 213–227. [Google Scholar]
- Allbadi, Y.; Shehab, J.N.; Jasim, M.M. The Smart Parking System Using Ultrasonic Control Sensors. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1076, 012064. [Google Scholar] [CrossRef]
- Lee, C.; Han, Y.; Jeon, S.; Seo, D.; Jung, I. Smart Parking System for Internet of Things. In Proceedings of the International Conference on Consumer Electronics, Las Vegas, NV, USA, 7–11 January 2016. [Google Scholar] [CrossRef]
- Revathi, G.; Dhulipala, V.R.S. Smart parking systems and sensors: A survey. In Proceedings of the 2012 International Conference on Computing, Communication and Applications, Dindigul, India, 22–24 February 2012. [Google Scholar]
- Balfaqih, M.; Jabbar, W.; Khayyat, M.; Hassan, R. Design and development of smart parking system based on fog computing and internet of things. Electronics 2021, 10, 3184. [Google Scholar] [CrossRef]
- Park, K.; Im, G.; Kim, M.; Park, J. Parking space detection based on camera and LIDAR sensor fusion. J. Korea Robot. Soc. 2019, 14, 170–178. [Google Scholar] [CrossRef]
- Ibisch, A.; Stümper, S.; Altinger, H.; Neuhausen, M.; Tschentscher, M.; Schlipsing, M.; Salinen, J.; Knoll, A. Towards autonomous driving in a parking garage: Vehicle localization and tracking using environment-embedded lidar sensors. In Proceedings of the 2013 IEEE intelligent vehicles symposium (IV), Gold Coast, QLD, Australia, 23–26 June 2013. [Google Scholar]
- Lombacher, J.; Hahn, M.; Dickmann, J.; Wohler, C. Detection of arbitrarily rotated parked cars based on radar sensors. In Proceedings of the 2015 16th International Radar Symposium (IRS), Dresden, Germany, 24–26 June 2015. [Google Scholar]
- Prophet, R.; Hoffmann, M.; Vossiek, M.; Li, G.; Sturm, C. Parking space detection from a radar based target list. In Proceedings of the 2017 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Nagoya, Japan, 19–21 March 2017. [Google Scholar]
- Floris, A.; Girau, R.; Porcu, S.; Pettorru, G.; Atzori, L. Implementation of a magnetometer based vehicle detection system for smart parking applications. In Proceedings of the 2020 IEEE International Smart Cities Conference (ISC2), Piscataway, NJ, USA, 28 September–1 October 2020; pp. 1–7. [Google Scholar]
- Wolff, J.; Heuer, T.; Gao, H.; Weinmann, M.; Voit, S.; Hartmann, U. Parking monitor system based on magnetic field senso. In Proceedings of the 2006 IEEE Intelligent Transportation Systems Conference, Toronto, ON, Canada, 17–20 September 2006; pp. 1275–1279. [Google Scholar]
- Zhang, Z.; Tao, M.; Yuan, H. A parking occupancy detection algorithm based on AMR sensor. IEEE Sens. J. 2014, 15, 1261–1269. [Google Scholar] [CrossRef]
- Elaouad, S.; Benmakhlouf, S.; Tobaji, N.; Dmini, M.A.; Alj, Y.S. Car parking management system using AMR-sensor technology. In Proceedings of the 2015 International Conference on Electrical and Information Technologies (ICEIT), Marrakech, Morocco, 25–27 March 2015. [Google Scholar]
- Saxena, A. Piezoelectric based Smart Parking System. Int. J. Res. Appl. Sci. Eng. Technol. 2020, 8, 2517–2519. [Google Scholar] [CrossRef]
- Meng, X.; Wan, H.; Qin, T. Design of urban parking space monitoring system based on LPWAN. In Proceedings of the 2020 IEEE 20th International Conference on Communication Technology (ICCT), Nanning, China, 28–31 October 2020; pp. 1029–1034. [Google Scholar]
- Trafford, R.; Linden, R.; Donovan, J.; Neville, E.; Marroquin, W.; Tan, S. Retrofitting Rural Infrastructure for Smart Parking and Traffic Monitoring. In Proceedings of the 2017 IEEE Sensors Applications Symposium (SAS), Glassboro, NJ, USA, 13–15 March 2017. [Google Scholar]
- Paidi, V.; Fleyeh, H.; Håkansson, J.; Nyberg, R.G. Smart Parking Sensors, Technologies and Applications for Open Parking Lots: A Review. IET Intell. Transp. Syst. 2018, 12, 735–741. [Google Scholar] [CrossRef]
- Bao, X.; Zhan, Y.; Xu, C.; Hu, K.; Zheng, C.; Wang, Y. A novel dual microwave Doppler radar based vehicle detection sensor for parking lot occupancy detection. IEICE Electron. Express 2017, 14, 20161087. [Google Scholar] [CrossRef]
- Hoang, T.M.; Nguyen, P.H.; Truong, N.Q.; Lee, Y.W.; Park, K.R. Deep retinanet-based detection and classification of road markings by visible light camera sensors. Sensors 2019, 19, 281. [Google Scholar] [CrossRef]
- Kumar, H.; Singh, M.K.; Gupta, M.P.; Madaan, J. Moving towards smart cities: Solutions that lead to the Smart City Transformation Framework. Technol. Forecast. Soc. Change 2020, 153, 119281. [Google Scholar] [CrossRef]
- Patel, K.R.; Meduri, P. Faster R-CNN based automatic parking space detection. In Proceedings of the 2020 The 3rd International Conference on Machine Learning and Machine Intelligence, Shanghai, China, 6–8 November 2020. [Google Scholar]
- Padmasiri, H.; Madurawe, R.; Abeysinghe, C.; Meedeniya, D. Automated vehicle parking occupancy detection in real-time. In Proceedings of the 2020 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 28–30 July 2020. [Google Scholar]
- Amato, G.; Carrara, F.; Falchi, F.; Gennaro, C.; Meghini, C.; Vairo, C. Deep learning for decentralized parking lot occupancy detection. Expert Syst. Appl. 2017, 72, 327–334. [Google Scholar] [CrossRef]
- Agrawal, T.; Urolagin, S. Multi-angle parking detection system using mask r-cnn. In Proceedings of the 2020 2nd International Conference on Big Data Engineering and Technology, Singapore, 3–5 January 2020. [Google Scholar]
- Akhawaji, R.; Sedky, M.; Soliman, A.H. Illegal parking detection using Gaussian mixture model and kalman filter. In Proceedings of the 2017 IEEE/ACS 14th International Conference on Computer Systems and Applications (AICCSA), Hammamet, Tunisia, 30 October–3 November 2017. [Google Scholar]
- Choeychuen, K. Automatic parking lot mapping for available parking space detection. In Proceedings of the 2013 5th International Conference on Knowledge and Smart Technology (KST), Chonburi, Thailand, 31 January–1 February 2013. [Google Scholar]
- Xu, Y.; Yu, G.; Wang, Y.; Wu, X.; Ma, Y. Car detection from low-altitude UAV imagery with the faster R-CNN. J. Adv. Transp. 2017, 2017, 2823617. [Google Scholar] [CrossRef]
- Park, J.; Kang, S. Development of an Automatic Parking Detection System Using a Pneumatic Road Tube Sensor. Appl. Sci. 2019, 9, 4412. [Google Scholar] [CrossRef]
- Rahman, S.; Ramli, M.; Arnia, F.; Muharar, R.; Luthfi, M.; Sundari, S. Analysis and comparison of hough transform algorithms and feature detection to find available parking spaces. J. Phys. Conf. Ser. 2020, 1566, 012092. [Google Scholar] [CrossRef]
- Wang, Y.; Li, M.; Lin, X.; He, F. Online operations strategies for automated multistory parking facilities. Transp. Res. Part E Logist. Transp. Rev. 2021, 145, 102135. [Google Scholar] [CrossRef]
- Fahim, A.; Hasan, M.; Chowdhury, M.A. Smart parking systems: Comprehensive review based on various aspects. Heliyon 2021, 7, e07050. [Google Scholar] [CrossRef]
- Awaisi, K.S.; Abbas, A.; Zareei, M.; Khattak, H.A.; Khan, M.U.S.; Ali, M.; Din, I.U.; Shah, S. Towards a fog enabled efficient car parking architecture. IEEE Access 2019, 7, 159100–159111. [Google Scholar] [CrossRef]
- Al-Turjman, F.; Malekloo, A. Smart parking in IoT-enabled cities: A survey. Sustainable Cities and Society 2019, 49, 101608. [Google Scholar] [CrossRef]
- Ali, G.; Ali, T.; Irfan, M.; Draz, U.; Sohail, M.; Glowacz, A.; Sulowicz, M.; Mielnik, R.; Bin Faheem, Z.; Martis, C. IoT based smart parking system using deep long short memory network. Electronics 2020, 9, 1696. [Google Scholar] [CrossRef]
- Wu, G.; Xu, X.; Lu, X. Considering the influence of queue length on performance improvement for a new compact robotic automated parking system. Int. J. Inf. Manag. 2020, 50, 487–497. [Google Scholar] [CrossRef]
- Shuttle Parking System. Available online: https://jagteq.in/sector/car-parking-systems/shuttle-car-parking-systems/ (accessed on 10 July 2023).
- Puzzle Parking System. Available online: http://citylift.co.in/carparking/puzzle-parking.html (accessed on 10 July 2023).
- Rotary Parking System. Available online: https://www.researchgate.net/figure/Rotary-smart-parking-10_fig1_340580862 (accessed on 10 July 2023).
- Rotary Parking System. Available online: https://www.electronicwings.com/users/swapwaghul/projects/242/automatic-rotary-car-parking-system (accessed on 10 July 2023).
- Vis, I.F. Survey of research in the design and control of automated guided vehicle systems. Eur. J. Oper. Res. 2006, 170, 677–709. [Google Scholar] [CrossRef]
- Rotary Parking System. Available online: https://www.hardingsteel.com/parking-blog/2021/1/13/what-is-a-stack-parkingsytem#:~:text=Their%20main%20purpose%2C%20as%20you,ordinarily%20house%20only%20one%20vehicle (accessed on 10 July 2023).
- Alfieri, A.; Cantamessa, M.; Monchiero, A.; Montagna, F. Heuristics for puzzle-based storage systems driven by a limited set of automated guided vehicles. J. Intell. Manuf. 2012, 23, 1695–1705. [Google Scholar] [CrossRef]
- De Ryck, M.; Versteyhe, M.; Debrouwere, F. Automated guided vehicle systems, state-of-the-art control algorithms and techniques. J. Manuf. Syst. 2020, 54, 152–173. [Google Scholar] [CrossRef]
- Nandyal, S.; Sultana, S.; Anjum, S. Smart car parking system using arduino uno. Int. J. Comput. Appl. 2017, 169, 13–18. [Google Scholar] [CrossRef]
- Kanteti, D.; Srikar, D.V.S.; Ramesh, T.K. Intelligent smart parking algorithm. In Proceedings of the 2017 International Conference On Smart Technologies For Smart Nation (SmartTechCon), Bengaluru, India, 17–19 August 2017; pp. 1018–1022. [Google Scholar]
- Kubler, S.; Robert, J.; Hefnawy, A.; Cherifi, C.; Bouras, A.; Främling, K. IoT-based smart parking system for sporting event management. In Proceedings of the 13th International Conference on Mobile and Ubiquitous Systems: Computing, Networking and Services, Hiroshima, Japan, 28 November–1 December 2016; pp. 104–114. [Google Scholar]
- Ahmad, S.; Ali, J.; Jamil, F.; Whangbo, T.K.; Kim, D. Complex problems solution as a service based on predictive optimization and tasks orchestration in smart cities. Safety 2021, 7, 8. [Google Scholar] [CrossRef]
- Ibrahim, M.; Imran, M.; Jamil, F.; Lee, Y.J.; Kim, D.H. EAMA: Efficient adaptive migration algorithm for cloud data centers (CDCs). Symmetry 2021, 13, 690. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No. | Year | Type of Model | Dataset | Number of Images | Accuracy | Precision | Recall | Model Type | Input Size | AUC |
|---|---|---|---|---|---|---|---|---|---|---|
| [1] | 2017 | CNN | Custome Dataset | 2702 | AlexNet 95% LeNet 93% | Not reported | Not reported | LeNet AlexNet | 1000 × 1000 pixels | Not reported |
| [2] | 2019 | Deep Learning | Custome Dataset | 5800 | 86.00% | 82.50% | 80.00% | 3D-CNN + LSTM | Not specified | Not reported |
| [3] | 2018 | CNN | Custome Dataset | 8336 | 90.00% | Not reported | Not reported | Sequential | 128 × 56 pixels | Not reported |
| [5] | 2021 | Graph Neural Network | PS2 | 12,165 | Not reported | 97.05% | 90.70% | - | 600 × 600 pixels | Not reported |
| [6] | 2021 | YOLOv3 | Custome Dataset | 4900 | 94.70% | 98.61% | 98.94% | Object detection model | - | Not reported |
| [10] | 2020 | Deep Learning | Custome Dataset | 22,817 | Not reported | 87.75% | 88.52% | MobileNetV2 YOLOv3 | 64 × 192 pixels 256 × 768 pixels | Not reported |
| [11] | 2016 | Deep Learning | CNRPark and PKLot | 12,000 | 98.10% | Not reported | Not reported | CNN (AlexNet variant) | 224 × 224 pixels | 98.90% |
| [12] | 2020 | DeepPS DMPRPS | PS2 + Synthetic images | 23,000 | Not reported | 95.25% 95.33% | 94.19% 97.39% | - | - | Not reported |
| [13] | 2018 | DeepPS | PS2 | 12,165 | Not reported | 99.54% | 98.89% | AlexNet YoloV2 | 416 × 416 pixels | 0.982 |
| [14] | 2020 | SPFCN | PS2 | 11,665 | 98.00% | 98.26% | 97.56% | SPFCN | 224 × 224 pixels | Not reported |
| [15] | 2019 | DMPR-PS | PS2 | 12,165 | Not reported | 99.42% | 99.37% | VGG-16 | 224 × 224 pixels | Not reported |
| [16] | 2019 | Deep Learning | Custome Dataset | 400 | Not reported | mAP = 60.2% | Not reported | Faster R-CNN | - | Not reported |
| [17] | 2020 | Deep Learning | Custome Dataset | 40,000 | Not reported | 98.72% | 99.14% | Yolov3 | 1280 × 720 pixels | Not reported |
| [18] | 2021 | Deep Learning | PS2 | 12,165 | Not reported | 99.77% | 99.77% | VGG-16 | 416 × 416 pixels | Not reported |
| [19] | 2018 | VH-HFCN | Custome Dataset | 4200 | Mean IoU 46.51% | Not reported | Not reported | MatConvNet | 640 × 480 pixels | Not reported |
| [21] | 2020 | CNN | Custome Dataset | Not reported | 97.80% | Not reported | Not reported | - | - | Not reported |
| [22] | 2021 | cGAN | HERV | 1240 | Not reported | 98.63% | 98.97% | cGAN and autoencoder | 360 × 240 900 × 350 pixels | Not reported |
| [24] | 2017 | PPHT | Custome Dataset | 3264 | Not reported | 98.80% | 91.70% | Progressive Probabilistic Hough Transform | 1600 × 1200 pixels | Not applicable |
| [25] | 2015 | - | Custome Dataset | Not reported | Not reported | Not reported | Not reported | Not reported | Not reported | Not applicable |
| [58] | 2020 | CNN | PKLot | Not reported | Not reported | Not reported | Not reported | Faster R-CNNYolo | - | Not reported |
| [60] | 2020 | CNN | COWC | 12,000 | 95% | Not reported | Not reported | Mask R-CNN | - | Not reported |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, K.; Singh, V.; Raja, L.; Bhagirath, S.N. A Review of Parking Slot Types and their Detection Techniques for Smart Cities. Smart Cities 2023, 6, 2639-2660. https://doi.org/10.3390/smartcities6050119
Kumar K, Singh V, Raja L, Bhagirath SN. A Review of Parking Slot Types and their Detection Techniques for Smart Cities. Smart Cities. 2023; 6(5):2639-2660. https://doi.org/10.3390/smartcities6050119
Chicago/Turabian StyleKumar, Kamlesh, Vijander Singh, Linesh Raja, and Swami Nisha Bhagirath. 2023. "A Review of Parking Slot Types and their Detection Techniques for Smart Cities" Smart Cities 6, no. 5: 2639-2660. https://doi.org/10.3390/smartcities6050119
APA StyleKumar, K., Singh, V., Raja, L., & Bhagirath, S. N. (2023). A Review of Parking Slot Types and their Detection Techniques for Smart Cities. Smart Cities, 6(5), 2639-2660. https://doi.org/10.3390/smartcities6050119