Model Predictive Control of a Road Junction


Abstract
:1. Introduction
2. MPC Control Logic
| Algorithm 1: MPC control of a road junction. |
 |
3. MPC Road Junction Optimization Problem
3.1. Model of a TL
3.2. Model of the Queue at a TL
Number of Vehicles in Queue
3.3. Conflict Avoiding Constraints
3.4. Objective Function
3.5. Overall MPC Optimization Problem
3.6. MPC Optimality and Stability
4. Validation by Simulation
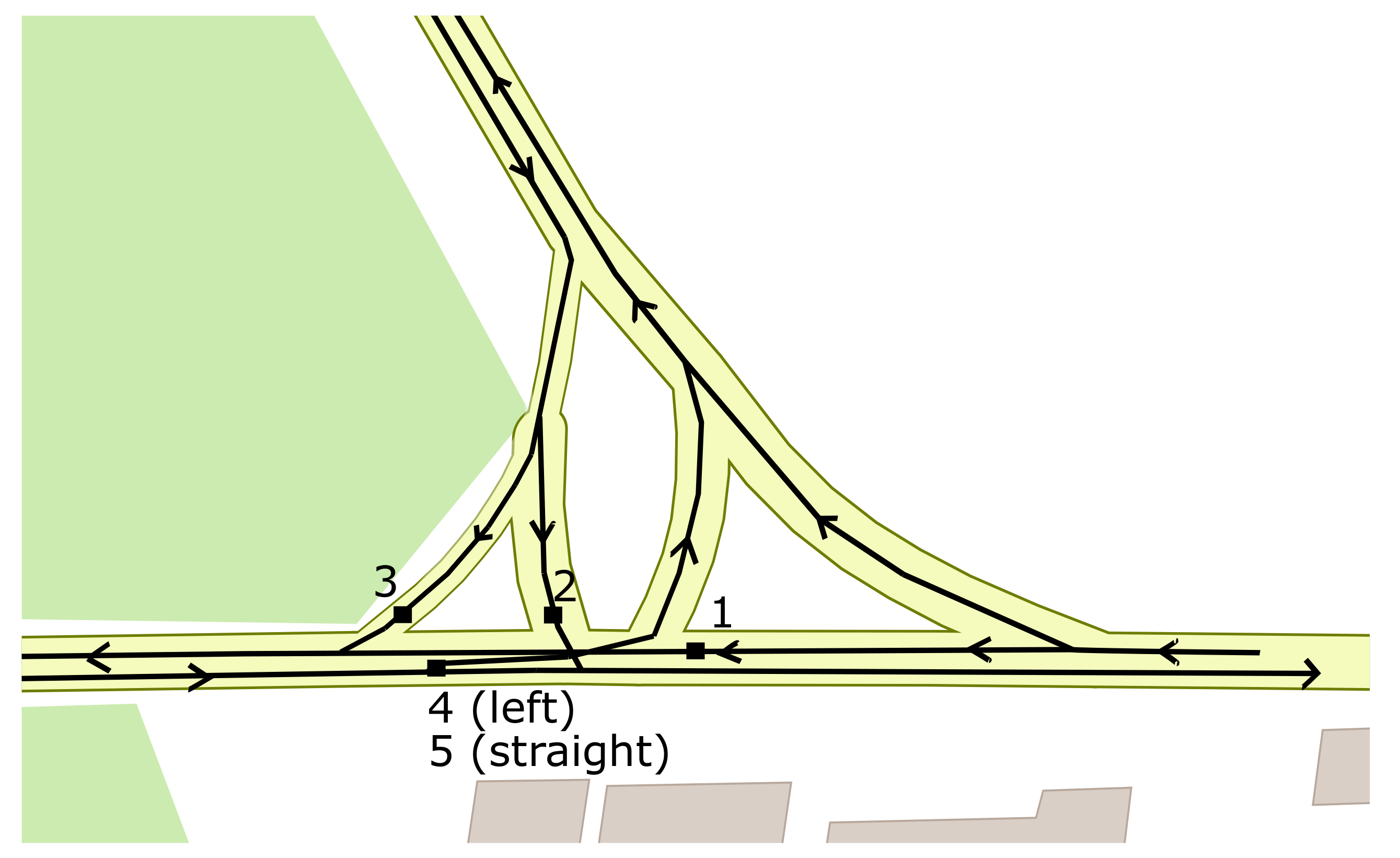
4.1. Case Study, Simulation Scenario and Setup
- TLs 1 and 5 are green for 40 s;
- TL 1 is yellow and TL 5 is green for 5 s;
- TLs 5 and 4 are green for 15 s;
- TLs 5 and 4 are yellow for 5 s;
- TLs 2 and 3 are green for 25 s;
- TLs 2 and 3 are yellow for 5 s, then a new cycle starts.
4.2. Queue Balancing
5. Conclusions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| KPI | Key performance indicator |
| MPC | Model predictive control |
| TL | Traffic Light |
References
- Smith, M.J.; Iryo, T.; Mounce, R.; Rinaldi, M.; Viti, F. Traffic control which maximises network throughput: Some simple examples. Transp. Res. Part C Emerg. Technol. 2019, 107, 211–228. [Google Scholar] [CrossRef]
- Chow, A.H.; Sha, R.; Li, S. Centralised and decentralised signal timing optimisation approaches for network traffic control. Transp. Res. Part C Emerg. Technol. 2019, 113, 108–123. [Google Scholar] [CrossRef]
- Małecki, K.; Pietruszka, P.; Iwan, S. Comparative analysis of selected algorithms in the process of optimization of traffic lights. In Asian Conference on Intelligent Information and Database Systems; Springer: Cham, Switzerland, 2017; pp. 497–506. [Google Scholar]
- Liang, X.; Du, X.; Wang, G.; Han, Z. A deep reinforcement learning network for traffic light cycle control. IEEE Trans. Veh. Technol. 2019, 68, 1243–1253. [Google Scholar] [CrossRef] [Green Version]
- Bui, K.H.N.; Jung, J.E.; Camacho, D. Game theoretic approach on Real-time decision making for IoT-based traffic light control. Concurr. Comput. Pract. Exp. 2017, 29, e4077. [Google Scholar] [CrossRef]
- Leal, S.S.; de Almeida, P.E.M.; Chung, E. Active control for traffic lights in regions and corridors: An approach based on evolutionary computation. Transp. Res. Procedia 2017, 25, 1769–1780. [Google Scholar] [CrossRef]
- Garg, H.; Kaushal, E.G. Traffic Lights Control System for Indian Cities Using WSN and Fuzzy Control. Traffic 2017, 4, 56–65. [Google Scholar]
- Ye, B.L.; Wu, W.; Ruan, K.; Li, L.; Chen, T.; Gao, H.; Chen, Y. A survey of model predictive control methods for traffic signal control. IEEE/CAA J. Autom. Sin. 2019, 6, 623–640. [Google Scholar] [CrossRef]
- Kamal, M.; Imura, J.; Hayakawa, T.; Ohata, A.; Aihara, K. Traffic Signal Control in an MPC Framework Using Mixed Integer Programming. IFAC Proc. Vol. 2013, 46, 645–650. [Google Scholar] [CrossRef]
- Kamal, M.A.S.; Imura, J.i.; Hayakawa, T.; Ohata, A.; Aihara, K. Traffic signal control of a road network using MILP in the MPC framework. Int. J. Intell. Transp. Syst. Res. 2015, 13, 107–118. [Google Scholar] [CrossRef]
- Jin, S.; Hou, Z.; Chi, R.; Bu, X. Model free adaptive predictive control approach for phase splits of urban traffic network. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 5750–5754. [Google Scholar]
- Wang, Q.; Abbas, M. Optimal urban traffic model predictive control for NEMA standards. Transp. Res. Rec. 2019, 2673, 413–424. [Google Scholar] [CrossRef]
- Eini, R.; Abdelwahed, S. Distributed Model Predictive Control for Intelligent Traffic System. In Proceedings of the 2019 International Conference on Internet of Things (iThings) and IEEE Green Computing and Communications (GreenCom) and IEEE Cyber, Physical and Social Computing (CPSCom) and IEEE Smart Data (SmartData), Atlanta, GA, USA, 14–17 July 2019; pp. 909–915. [Google Scholar]
- Li, X.; Sun, J.Q. Multi-objective optimal predictive control of signals in urban traffic network. J. Intell. Transp. Syst. 2019, 23, 370–388. [Google Scholar] [CrossRef]
- Wu, N.; Li, D.; Xi, Y.; de Schutter, B. Distributed Event-Triggered Model Predictive Control for Urban Traffic Lights. IEEE Trans. Intell. Transp. Syst. 2020, 1–11. [Google Scholar] [CrossRef]
- Glover, F. Improved linear integer programming formulations of nonlinear integer problems. Manag. Sci. 1975, 22, 455–460. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Liu, H.X. Estimating traffic volumes for signalized intersections using connected vehicle data. Transp. Res. Part C Emerg. Technol. 2017, 79, 347–362. [Google Scholar] [CrossRef] [Green Version]
- Han, E.; Lee, H.P.; Park, S.; So, J.J.; Yun, I. Optimal signal control algorithm for signalized intersections under a V2I communication environment. J. Adv. Transp. 2019, 2019. [Google Scholar] [CrossRef]
- Bemporad, A.; Morari, M. Control of systems integrating logic, dynamics, and constraints. Automatica 1999, 35, 407–427. [Google Scholar] [CrossRef]
- Little, J.D.; Graves, S.C. Little’s law. In Building Intuition: Insights from Basic Operations Management Models and Principles; Springer: Berlin/Heidelberg, Germany, 2008; pp. 81–100. [Google Scholar]
- Stellato, B.; Naik, V.V.; Bemporad, A.; Goulart, P.; Boyd, S. Embedded mixed-integer quadratic optimization using the OSQP solver. In Proceedings of the 2018 European Control Conference (ECC), Limassol, Cyprus, 12–15 June 2018; pp. 1536–1541. [Google Scholar]
- Sahinidis, N.V. Mixed-Integer Nonlinear Programming 2018; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar]
- Simon, D.; Löfberg, J. Stability analysis of model predictive controllers using Mixed Integer Linear Programming. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 7270–7275. [Google Scholar]
- Bezanson, J.; Edelman, A.; Karpinski, S.; Shah, V. Julia: A Fresh Approach to Numerical Computing. SIAM Rev. 2017, 59, 65–98. [Google Scholar] [CrossRef] [Green Version]
- Dunning, I.; Huchette, J.; Lubin, M. JuMP: A Modeling Language for Mathematical Optimization. SIAM Rev. 2017, 59, 295–320. [Google Scholar] [CrossRef]
- Shamlitskiy, Y.I.; Mironenko, S.; Kovbasa, N.; Bezrukova, N.; Tynchenko, V.; Kukartsev, V. Evaluation of the effectiveness of traffic control algorithms based on a simulation model in the AnyLogic. Phys. Conf. Ser. 2019, 1353, 012101. [Google Scholar] [CrossRef] [Green Version]
- Lopez, P.A.; Behrisch, M.; Bieker-Walz, L.; Erdmann, J.; Flötteröd, Y.P.; Hilbrich, R.; Lücken, L.; Rummel, J.; Wagner, P.; Wießner, E. Microscopic Traffic Simulation using SUMO. In Proceedings of the 21st IEEE International Conference on Intelligent Transportation Systems, Maui, HI, USA, 4–7 November 2018. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Traffic Intensity | |||||
|---|---|---|---|---|---|
| Low | 0.13 | 0.086 | 0.086 | 0.05 | 0.2 |
| Medium | 0.52 | 0.35 | 0.35 | 0.2 | 0.8 |
| High | 0.975 | 0.645 | 0.645 | 0.375 | 1.5 |
| Average Queue Length | |||||
|---|---|---|---|---|---|
| Hour 1 (low traffic) | 0.47 (0.35) | 0.62 (0.58) | 0.68 (0.58) | 0.37 (0.42) | 0.58 (0.34) |
| Hour 2 (medium) | 1.47 (2.34) | 1.32 (2.35) | 1.02 (2.17) | 1.02 (1.60) | 1.95 (1.80) |
| Hour 3 (high) | 5.29 (10.44) | 7.72 (8.46) | 2.54 (7.51) | 3.43 (8.60) | 6.96 (7.23) |
© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liberati, F. Model Predictive Control of a Road Junction. Smart Cities 2020, 3, 806-817. https://doi.org/10.3390/smartcities3030041
Liberati F. Model Predictive Control of a Road Junction. Smart Cities. 2020; 3(3):806-817. https://doi.org/10.3390/smartcities3030041
Chicago/Turabian StyleLiberati, Francesco. 2020. "Model Predictive Control of a Road Junction" Smart Cities 3, no. 3: 806-817. https://doi.org/10.3390/smartcities3030041
APA StyleLiberati, F. (2020). Model Predictive Control of a Road Junction. Smart Cities, 3(3), 806-817. https://doi.org/10.3390/smartcities3030041