1. Introduction
Two decades ago, time reversal was introduced in the scientific community as a physical process that refocuses the waves back to the original source that created them [
1]. Since then, the technique has been utilized as a computational tool for solving inverse wave propagation problems [
2]. There are two main distinct steps in the time reversal technique, namely, the forward and backward steps. During the forward step, a source excitation is used to generate the propagating field and the response of the medium is acquired using recorders. The signals acquired during the forward step are then time reversed and re-emited. This is the backward step, during which the field re-focuses at the location of the forward’s step excitation source. One of these steps or even both of them might be performed numerically, giving birth to a computational approach. As two typical examples, we refer to the problem of source localization, where the backward step is usually realized numerically, while for some energy focusing applications, the forward step could be the design step and the backward step could be the one to be performed physically in order to succeed the energy focusing.
In some previous studies [
3], a detailed Signal-to-Noise ratio (SNR) analysis for the time reversal process on bounded acoustic domains was presented for both source and defect localization. The SNR definition used, which is retained here, is the value of the image at the true source or defect (here novelty) location, divided by the maximal value of the image outside a small region around the true source (or novelty) location. A study of the time reversal approach in an elastodynamic bounded domain has been presented in [
4], where a singular value decomposition of the array response matrix was used in order to detect multiple scatterers. In another work [
5], some initial effort on the application of the time reversal process on structures has been presented and further developed in [
6], where some theoretical links with classical reciprocity theorems have also been attempted. Furthermore, a study of the sensor’s placement together with a variety of applications are given in that latter work.
In the current work, we extend previous efforts in the framework of coupled structural-acoustic systems, which we will call vibro-acoustic environments. A first attempt for an experimental evidence of time reversal in an elasto-acoustic medium is given in [
7], while a numerical reproduction for the case where ultrasound elastic waves are time reversed back to their source with a time reversal mirror in a fluid adjacent to the solid is given in [
8]. The combination of microphone-acquired data together with a kinematic response (i.e., displacements, velocities or accelerations) was presented in [
9], where a methodology was designed for fault detection following the previous published approaches [
10]. In this work, the authors considered the acquisition of acoustic data via microphones in combination with a numerical vibro-acoustic model and suggested that this could be a viable way to achieve non-intrusive sensing with a high accuracy. They further exploited this feature for fault detection in a plate. Later, this setup was extended, considering also the Time-Reversal MUltiple SIgnal Classification (TR-MUSIC) algorithm in order to successfully localize extended defects [
11]. A study on the improvement of the sensor’s placement has been presented [
12] in regard to the latter TR-MUSIC approach on vibro-acoustic systems. The main difference with the framework introduced in our work is that the time reversal approach for fault detection presented in the aforementioned references is based on a costly and difficult minimization approach using a set of reference trial models with different fault locations, while here we use the difference between the response of the vibro-acoustic system that contains the novelty and the original vibro-acoustic system (i.e., before the novelty was introduced).
In what follows, we present in
Section 2 a detailed description of the problem and the expected goals. The equations governing the response on each component of the vibro-acoustic system as well as the coupling between these components and the assumptions made are given in
Section 3. The computational time reversal approach adopted here is presented in
Section 4. Finally, numerical experiments are designed, solved and discussed in
Section 5 and our final conclusions are presented in
Section 6.
2. Statement of the Problem
Time reversibility in a vibro-acoustic environment is a promising procedure that can be useful in several applications, e.g., scatterer (cavities or obstacles) identification and localization as well as crack or general defect and damage localization in a non destructive testing context [
13].
The first problem we are interested in is source localization. Here, we try to infer the spatial location of the original source that created the signals measured from a collection of receivers that record the acoustic pressure responses via microphones as well as the kinematic responses, via accelerometers. The source might be a mechanical or acoustic excitation (e.g., a blast). It has been demonstrated that using kinematic responses together with acoustic recordings makes the procedure more stable and less sensitive to background noise, especially since microphones are prone to such noise [
11]. On the other hand, the use of microphones offers the opportunity to speed-up the inspection by saving time in the sensor installation. Additionally, there are certain applications where it is difficult to place sensors onto the structure in order to acquire kinematic response or it is not proper to modify the dynamics of the system by added masses (i.e., lightweight structures). In such cases, the use of microphones is found to be beneficial [
9].
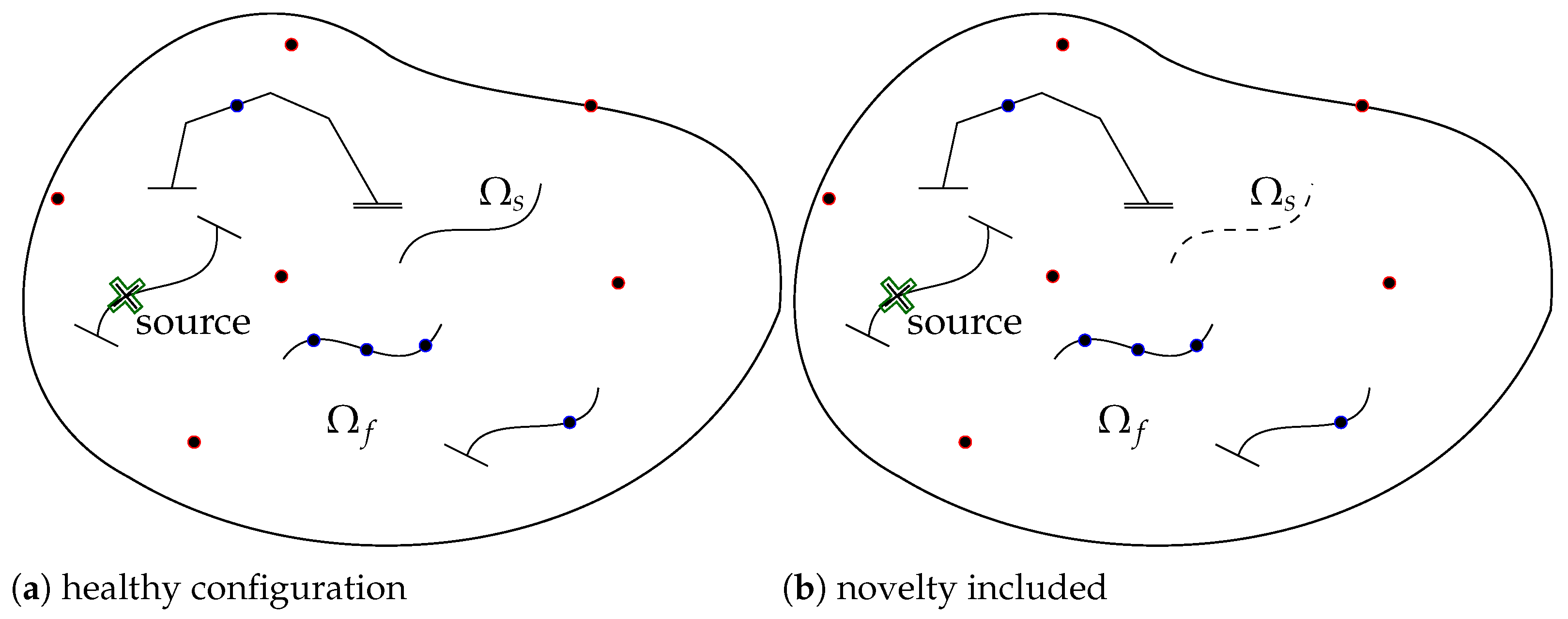
The second problem we are interested in is the localization of novelties taking place within the coupled vibro-acoustic system. These novelties may appear in either the acoustic or the mechanical elastic part. It is more common for such novelties to happen in the elastic part, e.g., in the form of some occurred damage on the elastic body or on the support of it. In order to find which part of the structural assembly has suffered such modifications and to accurately define its spatial location, we assume that such a novelty will act as a secondary source. Using the time reversibility of the waves, it is possible to localize this secondary source similarly to the original excitation source. In this case, to focus on the field produced by the novelty, we subtract the wavefield produced by the original source when the novelty did not exist. By using this latter signal, which is the difference of the fields recorded before and after the appearance of the novelty, we are able to localize the novelty.
Let us now describe the procedure to be numerically implemented using the descriptive sketch of
Figure 1. For the source localization in a healthy medium, as shown in
Figure 1a, a source acts as acoustic or mechanic excitation at time
, and the response to this excitation is recorded on a finite number of recording stations as pressure (via microphones) or kinematic responses (using accelerometers or displacement/velocity sensors) for a duration time
T. We denote this wavefield
, including both acoustic and elastic responses, while the acquisition process is called the forward step. In the current computational approach, all data are obtained numerically using simulations of virtual experiments. Time reversibility assures us that reverting in time the recorded signals and re-emitting them as excitation, in a procedure called backward step, an energy focus will occur at the time
on the spatial location of the original source. Note that actually, one needs to revert the whole wavefield and re-emit it, although it is well documented that the reduced (or incomplete) time reversal, where the signal is recorded at a finite number of sensors, still keeps the refocusing property. This is the source localization process, while for the novelty localization, a few extra datum are needed. In this case, we record the wavefield for a modified system configuration, which includes the novelty, e.g., some modification on one of the beams in the domain as depicted in
Figure 1b; we call this wavefield
. By re-emitting the reversed signal of
, we expect to localize the original source by energy refocusing on its position at
, while for novelty, the localization will occur at time
, with
being the time needed for the wave to travel from the source location to the novelty location. Finally, by re-emitting the signal resulting from the difference
, we expect again energy refocusing on the novelty position at time
.
3. Governing Equations of Structure and Acoustic Mediums and Their Coupling
We consider an elastic solid at equilibrium occupying the domain
. The unknown displacement field of the solid is denoted by
, while linearized associated stress and strain tensors are indicated by
and
, respectively. The equation of motion for the solid, fixed on some part
of the boundary and subject to a given force density
on the rest boundary part
, is
where here we have also assumed silent initial conditions. The acoustic domain is considered to be a compressible inviscid and irrotational fluid, where using the pressure scalar field
p, the equation of motion is given as,
being the speed of sound in the acoustic medium and
the added mass per unit volume. Similar to the solid, the fluid is assumed to be at rest with silent initial conditions.
Now considering there is a part of the solid immersed or in touch with the fluid, we should appropriately consider the coupling of the domains and their responses. We denote that part as
, where the fluid particles and the solid move together in the normal direction of
. The normal unit vector external to the fluid is
and on the common part
is
, with
the normal unit vector external to the solid. We finally denote the unit normal as
n, which is equal to
, while on
, the following holds,
together with the continuity of pressure,
In order to couple the two different physics domains, a Neumann–Neumann approach [
14] is followed, where Equation (
4) is used for the realization of Equation (1c) and Equation (
3) for Equation (2c), respectively. For the latter case, we use the linearized Euler equation, which because of Equation (
3) takes the form,
Without loss of generality, in this work we focus on structures consisting of beams or frame structures lying inside a two-dimensional acoustic field. Therefore, we consider here the case of a solid in the form of one-dimensional beam, as shown in
Figure 2.
The above has been implemented using the SDE, which is a Java-based environment with numerical procedure capabilities [
15]. This java numerical methods framework is mostly created by one of the authors. The implementation follows mainly the fluid–structure interaction approach, as implemented in CALFEM [
16]. Verification has been further accomplished by comparing with results obtained from commercial finite element multiphysics software [
17], with very good agreement. We should mention that in our implementation, we have adopted the assumption of pressure continuity on the beam’s line, which is a fair hypothesis for our problems, yet not appropriate to study problems of pressure gaps. Using finite elements for the vibro-acoustic system [
18], the semi-discrete equation of motion [
19] for the coupled system in matrix form, is
where
and
stands for the mass and stiffness matrices of the structural part and
and
for the fluid, respectively. The degrees of freedom indicated by
d refer to kinematic variables (i.e., displacements and rotations) while
p stands for the acoustic pressure and
,
are excitation forces on the structural and acoustic part, respectively. Matrix
H actually contains the coupling coefficients. Finally, some damping could be considered in the form of Rayleigh damping, among other possible models.
4. Computational Vibro-Acoustic Time Reversal
In computational time reversal, at least one of the two steps (forward or backward), is supposed to be performed numerically by using some appropriate method, e.g., finite differences or a finite element method (FEM), as it is conducted in this work. Here, we use the conventional FEM, which is very common for the solution of structural dynamics problems. We present numerical experiments both for data acquisition during the forward step as well as for refocusing during the backward step. The methodology could be described according to the set-up presented in
Figure 1. Consider a coupled vibro-acoustic system, which is here represented by an acoustic field incorporating a number of beams and frame structures. In the forward step, we assume that a source (acoustic or mechanic) acts on some point
and that the response
is recorded on some point
for a time duration
T. It is possible to record both acoustic pressure and kinematic motion signals. Then, in the backward step, the time reversed signal response
is re-emitted as excitation from the respective
point. In that backward step, an energy refocusing will appear on the
point after the same duration of time
T. This main application is called source localization. Furthermore, another application is that of novelty localization, which considers location
as the point at which a secondary source exists (novelty). In this case, we use the difference between the original signal and the one recorded after the novelty has been introduced. This can be expressed as:
In other words, contains both primal and secondary source influence on the response, contains only the influence of the original source, while the influence of the novelty related field. Therefore, by re-emitting (in the backward step) the signal reversed in time, one could locate the original source; by re-emitting , one could locate the secondary source due to novelty; and finally, by re-emission, one could, possibly, locate both the original and secondary sources.
Of crucial importance is the choice of quantity to be monitored in order to observe the refocusing during the backward step. That is more prominent in the case of different physics domain coupling, where variables with different scales may coexist. The refocusing at an appropriate discrete time [
5] or using time averaging techniques [
20] will indicate the spatial location of the original source excitation used during the forward step. Regarding the monitoring quantity, here we consider the pressure field, while some more general quantity, e.g., the Euclidean norm of all the components of existing degrees of freedom on each spatial position, could also be appropriate.
For the source localization problem, we expect refocusing during the backward step, at the location of original source point at time
,
being the peak of the pulse. The refocusing time in the novelty localization will be
, where
is the time needed for the wave to propagate from the source point to the novelty location. Since the location of the novelty is the main unknown in our problem, the time
is also unknown. A solution to this problem is to use a time average approach [
20], or to utilize the evolution of appropriate measures (e.g., Shannon entropy, Bounded Variation) [
21]. A simple yet efficient approach for defining the refocusing time could be based on the arrival time of waves from the source to the sensor while interacting with the novelty location [
22]. More specifically, we can consider sensors (microphones) for the recording of the healthy configuration responses
as well as
, as given in Equation (
7). Using these signals, we can estimate the arrival time of
as
and that of the original source’s incident wave
as
, while the difference of these time intervals,
is an estimation of time
needed for the wave to travel from the source point to the novelty location. By using several sensors, we can derive an average time
, resulting hopefully in an improved estimate of the unknown time
. Then, the refocusing during the backward step should be expected to appear at time
.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}