Abstract
Due to the dynamic and harsh underwater environment, which involves a long propagation delay, high bit error rate, and limited bandwidth, it is challenging to achieve reliable communication in underwater wireless sensor networks (UWSNs) and network support applications, like environmental monitoring and natural disaster prediction, which require energy efficiency and low latency. To tackle these challenges, we introduce AC-RL-based power control (ACRLPC), a novel hybrid MAC protocol that can efficiently integrate Carrier Sense Multiple Access with Collision Avoidance (CSMA/CA)-based MAC and Time Division Multiple Access (TDMA) with Actor–Critic Reinforcement Learning (AC-RL). The proposed framework employs adaptive strategies, utilizing adaptive power control and intelligent access methods, which adjust to fluctuating conditions on the network. Harsh and dynamic underwater environment performance evaluations of the proposed scheme confirm a significant outperformance of ACRLPC compared to the current protocols of FDU-MAC, TCH-MAC, and UW-ALOHA-QM in all major performance measures, like energy consumption, throughput, accuracy, latency, and computational complexity. The ACRLPC is an ultra-energy-efficient protocol since it provides higher-grade power efficiency by maximizing the throughput and limiting the latency. Its overcoming of computational complexity makes it an approach that greatly relaxes the processing requirement, especially in the case of large, scalable underwater deployments. The unique hybrid architecture that is proposed effectively combines the best of both worlds, leveraging TDMA for reliable access, and the flexibility of CSMA/CA serves as a robust and holistic mechanism that meets the desired enablers of the system.
1. Introduction
UWSNs play a pivotal role in supporting a wide array of underwater operations—ranging from real-time critical tasks, like tsunami forecasting and military reconnaissance, to long-term environmental monitoring, marine biodiversity assessment, and subaqueous exploration [1,2,3,4]. The effectiveness of these applications is deeply rooted in reliable channel estimation and precise synchronization mechanisms. In the absence of these, the sensor data relayed to the BS or courier node risks becoming fragmented or irrelevant, especially in latency-sensitive scenarios. Operating in complex, ever-changing aquatic conditions, UWSNs demand rigorous attention to data integrity and synchronization. Overlooking these foundational requirements can compromise mission success—particularly in contexts such as defense surveillance, where precision and timing are paramount [5,6,7,8,9]. The harsh nature of underwater environments, characterized by fluctuating physical conditions and high signal attenuation, has pushed researchers to develop robust MAC protocols that can endure these challenges.
Over the years, the design of MAC protocols for UWSNs has become a vibrant area of study. This surge in interest is primarily fueled by the need to address underwater-specific issues, such as spatial–temporal uncertainty, multipath fading, energy limitations, and the difficulty of time synchronization [10,11,12,13,14,15]. As a result, protocol designs have gradually evolved to reflect these constraints while ensuring energy efficiency, data reliability, and seamless communication across underwater networks [15]. Parallel to the advancements in UWSNs, UWANs have also witnessed growing academic and industrial interest. Their applications span navigation assistance, unmanned underwater exploration, maritime surveillance, and hazardous material detection, among others. As global interest in oceanic exploration intensifies, the significance of UWANs continues to rise. These networks typically consist of a mix of surface buoys, mobile nodes below the surface, and stationary underwater sensors (Figure 1).
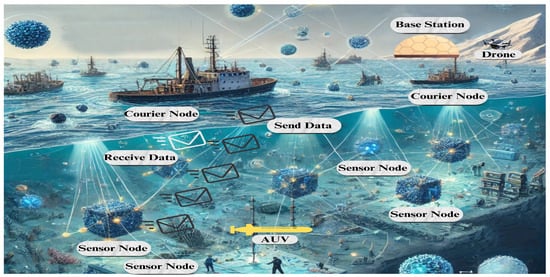
Figure 1.
UWSN deployment scenario with sensor nodes and data flow paths.
At the core of UWANs is underwater acoustic communication—currently the most feasible long-range, wireless communication method under water. This technology underpins collaborative underwater missions and supports diverse applications, including seabed mapping, marine ecosystem monitoring, ocean farming, and integrated sea–air–land systems [15,16,17]. However, UWANs are inherently constrained by slow propagation speeds, constantly shifting topologies, and the limited energy availability of their nodes—all of which can degrade network performance [18]. Some of the major hurdles in UWAN development include extended propagation delays, narrow bandwidths (often in the kHz range), and the limited computational and storage capabilities of underwater nodes [15]. Moreover, battery life remains a bottleneck due to energy-intensive operations and the impracticality of frequent recharging or replacement in remote underwater locations [15]. These challenges emphasize the need for highly specialized communication strategies tailored for underwater environments.
Developing an efficient MAC protocol for UWANs is particularly challenging due to the unique physical properties of acoustic channels [14]. Compared to terrestrial networks, underwater channels suffer from greater delay, limited data capacity, and a higher likelihood of bit errors. Traditional MAC protocols—designed for terrestrial systems—tend to perform poorly under these conditions, often generating excessive control overhead and inefficient bandwidth use [19,20,21,22]. While EM waves dominate terrestrial wireless communications, they are largely ineffective underwater due to rapid signal attenuation and seawater’s corrosive effects, which compromise both transmission equipment and cables. Optical communication, though capable of high-speed data transfer, remains cost-prohibitive and limited in range. In response, acoustic modems have emerged as a practical, low-energy solution, enabling broader and more sustainable deployment in underwater environments.
An effective MAC protocol is essential for regulating access to the communication medium in UWANs. It must ensure equitable resource allocation among nodes while coping with slow propagation, fluctuating delays, bandwidth constraints, and high energy costs. Environmental noise, shifting topologies, and intermittent connectivity further complicate protocol design. Thus, MAC protocols for UACNs must be specifically crafted to handle these demanding conditions. Given the defining traits of UASNs—such as long transmission delays, constrained energy reserves, low data rates, high BER, and dynamic node arrangements—each network layer must adopt purpose-built protocols. The MAC layer, in particular, plays a critical role in maintaining system efficiency and extending network lifetime, empowering sensor nodes to carry out their roles effectively under challenging underwater conditions [23].
The MAC protocols can efficiently schedule the use of resources within the network and avoid data collision [24]. And the mobile nodes in UACNs, such as, for example, Autonomous Underwater Vehicles (AUVs), Unmanned Underwater Vehicles (UUVs), and free-floaters, are essential for tracking underwater activities and transmitting information about the environment with the help of acoustic channels. Table 1 provides a comparative overview of communication technologies, highlighting the existing alternatives to acoustic communication channels, and it also clearly illustrates why acoustic channels are considered a high priority. The use of acoustic channels enables data collaboration to take place close to the network or even remote data centers. Mobile UWASNs have mobile sensor nodes that can provide cost- and energy-efficient data gathering and monitoring, as well as greater resiliency against node failures, allowing them to be used in short term missions, such as target detection, oil spill monitoring, and underwater surveillance. The information gained from the data collected assists in making decisions by allowing for information to be analyzed and integrated into decisions taken [19,20]. The mobility of nodes adds an extra layer of complexity to MAC design as it necessitates adjustments to handle dynamic node locations and to promote resilience in the face of rapidly changing environmental conditions. These networks are a collection of sensor nodes deployed in underwater environments that can be used to gather essential information about changes in oceanography [25]. Recently, reinforcement learning (RL) has been identified as a feasible approach to develop UWASN-MAC protocols at this abstraction level while keeping communication cost low [21]. The proposed protocols implement all sensor nodes as RL agents, which gives the agents the ability to sequentially refine the selection of good transmission strategies by continuous interaction with the environment. Many protocols employing various optimization methods, especially novel ML algorithms, have been suggested for the improvement of the energy efficiency in UWSNs. In this regard, one of these protocols, TDTSPC-MAC, address time synchronization, power control, clustering, and sleep mechanisms to minimize the energy utilization in 3D UWSNs [13]. UWSN deployment scenarios with sensor nodes and data flow paths are shown in Figure 1. In [26], the energy-efficient routing method in UWSNs is proposed to enhance the overall energy utilization, circumventing the limited energy source issue. Throughput, which is also enhanced in the proposed framework, is another important evaluation criterion of transmission performance.

Table 1.
Comparison of underwater wireless communication technologies.
In the proposed ACRLPC protocol for a UWSN, an optimized communication channel utilizes a hybrid MAC protocol that employs both CSMA/CA and TDMA, as shown in Figure 2, by employing an AC-RL technique and a Communication Channel-Optimized Adaptive Power Control (OAPC-MAC) method to vary the network performance according to the changing underwater environment. To solve both of these problems, a hybrid TDMA/CSMA MAC layer protocol that takes both the availability of TDMA and CSMA/CA at the MAC layer of a UWSN was designed. A hybrid approach to MAC, combining CSMA/CA and TDMA, was designed for UWSNs. This framework tackles the key challenges of energy efficiency and throughput in UWSNs, both of which are essential for their sustainable operation. In addition, we introduced a new power control strategy aimed at reducing energy consumption while optimizing transmission slot allocation. The entire process, outlined in the Section 3, is managed using RL-AC. In Section 2, we will discuss related works, the material and methods will be discussed in Section 3, the results and discussion will be presented in Section 4, and the conclusion will be made in Section 5.
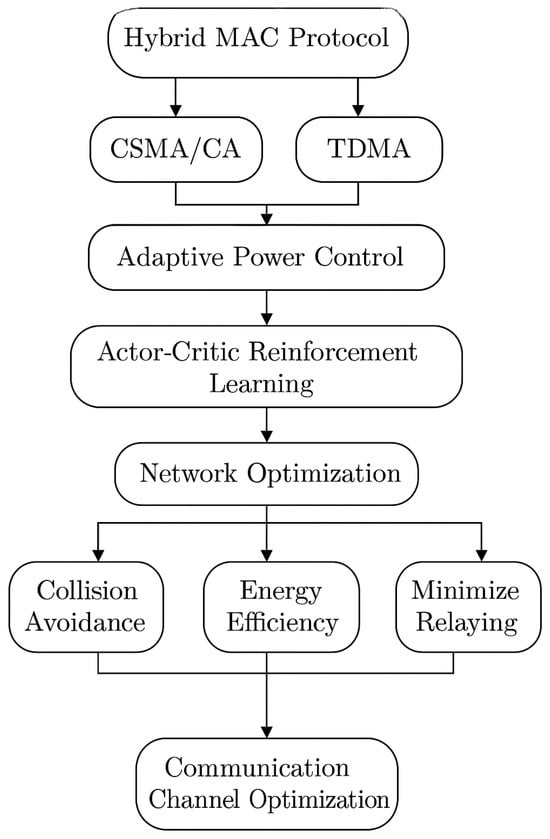
Figure 2.
Workflow of the proposed ACRLCPC-MAC framework.
2. Related Work
Over the past few years, the development of MAC protocols for UWSNs has advanced considerably, with growing emphasis on overcoming three core challenges: optimizing energy consumption, mitigating data collisions, and adapting effectively to the unpredictable nature of underwater environments. Researchers have explored various protocol structures, broadly categorized into contention-based, schedule-based, and hybrid models—each presenting their own balance of benefits and trade-offs across key performance indicators. For instance, UW-ALOHA-Q [27] employs reinforcement learning to support adaptive channel access, though it falls short in delivering a comprehensive evaluation of energy efficiency. RA-MAC [28], on the other hand, integrates a relay mechanism that supports both real-time and short-range transmissions. While this enhances energy performance, it introduces added complexity in managing relay nodes. Many of these protocols show potential under dynamic conditions but tend to suffer from issues, such as hidden terminal interference and limited scalability, especially in densely populated network scenarios.
Protocols like OCMAC applies synchronous duty cycling with RTS scheduling to reduce energy overhead, while O-ED-MAC attempt to address collisions through depth-aware scheduling in [29,30], respectively. These approaches, although efficient in relatively stable environments, often assume fixed or minimally mobile node topologies, limiting their effectiveness in mobile UWSNs. CA-MAC [31] attempts to integrate time synchronization and power control into a unified framework, yet the complexity of its implementation presents practical barriers. More recently, hybrid designs, such as TDTSPC-MAC [13], have been proposed, incorporating TDMA structures alongside power control strategies. Similarly, DC-MAC [32] utilizes game-theoretic approaches to facilitate collision-free scheduling among nodes. While learning-based solutions like RL-MAC [33] bring adaptiveness to the forefront, they often require considerable computational resources, which may not be suitable for energy-constrained nodes. RAP-MAC [34], for example, has demonstrated strong performance in real-world underwater testing environments, but it still lacks depth in its handling of energy optimization strategies.
The evolving research in UWSNs has driven notable innovation in MAC protocol design, with particular focus on addressing spatial fairness, managing long propagation delays, and mitigating hidden terminal issues. One notable contribution is the SFM-MAC protocol [35], which introduces a multichannel approach for a single transceiver system. This solution utilizes a Markov chain-based reservation model to assess control channel access, facilitating theoretical evaluation of the throughput under multichannel collision scenarios. In contrast, OA-CMAC [36] integrates optical and acoustic techniques to achieve high-speed, real-time data transmission. Through using optical links, it extends node lifetime by nearly 30% compared to conventional acoustic communication, and it enhances data delivery using a combination of CSMA/CA and SDMA-derived methods. Acoustic signaling is used for positioning, while optical handshakes validate channel availability. In unstable optical conditions, high-priority messages are automatically rerouted via acoustic links, ensuring data delivery continuity.
Meanwhile, the MAC framework proposed in [37] adopts a multi-level quorum system for scheduling collision-free time slots in high-load networks. By dynamically assigning non-overlapping slots to conflicting nodes, it enhances spatial reuse and ensures fairness via data-driven allocation logic. A lightweight retransmission technique is embedded to minimize delay effects, bolstering overall reliability and energy performance. On the other hand, OCMAC [29] emphasizes synchronous duty-cycled communication. Its performance was modeled through a Markov chain, demonstrating significant energy savings alongside acceptable levels of throughput and reliability. The protocol leverages RTS-based scheduling to curb collisions and boost communication efficiency. RA-MAC [28] introduces a relay-assisted architecture to improve energy efficiency by offloading direct transmissions to nearby relay nodes. It adopts a random access method with feedback while keeping control overhead minimal. Relay counts can be increased to enhance energy savings without significantly affecting throughput. The embedded feedback loop continually refines forwarding decisions, optimizing both performance and resource usage.
In the context of UWSNs carrying multimedia data, a reinforcement learning-driven MAC protocol [33] was proposed to optimize both energy consumption and transmission reliability. The protocol follows a two-phase approach: it first adjusts sensing time slots using RL algorithms, and it then adaptively tunes the contention window through network feedback. A Q-learning framework is applied in the absence of beacon or relay support to enable collision-free communication. A TXOP-based method is further employed to improve multi-hop transmission efficiency while limiting the need for frequent acknowledgments. The CA-MAC protocol [31] was designed to tackle long delays, low data rates, and high BER in UWSNs. It integrates time synchronization with adaptive power control to reduce interference and energy consumption. By adjusting transmission power based on node proximity, CA-MAC ensures precise, energy-efficient communication while extending the network’s lifespan.
In [38], the AVCW-MAC protocol introduced a dynamic contention window based on individual node propagation delay. This adaptive backoff method, shaped by delay metrics and tuning factors K1 and K2, improves fairness in accessing the channel and maintains communication stability, even in large-scale deployments. TDTSPC-MAC [13] approaches energy-efficient communication through a hybrid mechanism combining clustering, time sync, power control, and layered sleep scheduling in a 3D UASN context. Spatial partitioning is guided by a distributed clustering algorithm to reduce contention and optimize resource use. Similarly, DC-MAC [32] employs game theory to design a delay-aware, collision-avoidant MAC protocol. Nodes operate based on a non-cooperative game model that adjusts transmission probability according to network size and CH density, with CH degree used as a metric for optimizing communication scheduling through informed handshakes.
A reinforcement learning-based TRC-aware MAC protocol was introduced in [39] for decentralized, energy-conscious, multi-hop UWSNs. It features a contention-based relay strategy that is guided by environmental feedback and an RL agent to adaptively manage relay node selection. It utilizes ALOHA-inspired access and intermediate helper nodes to streamline long-range underwater transmissions while balancing energy consumption. Additionally, EE-UWSNs propose a joint MAC-routing scheme that manages power through transmission scoping, node inactivation, and multi-hop routing, optimizing communication over finite underwater environments. RAP-MAC [34] presents a robust and adaptive MAC framework suited for UA-SN scenarios, particularly in string-topology acoustic networks. It incorporates concurrent scheduling and real-time reconfiguration to adapt to changing network demands. Field tests in the South China Sea have demonstrated exceptional reliability and reach—achieving 601.6 bps at a distance of 87 km, outperforming conventional benchmarks by a substantial margin.
Another promising work [40] introduced a MAC protocol based on receiver-initiated handshakes driven by traffic estimation. Here, the receiver only initiates communication after gauging the current network load, enhancing collision avoidance and overall efficiency. Similarly, DAMAC was designed as a delay-sensitive MAC protocol for ad hoc UWSNs with static topologies, especially for critical infrastructure monitoring, like undersea pipelines. By removing pre-handshake packets and using simultaneous transmission scheduling, it lowers latency and improves energy usage. However, its static design may limit applicability in more mobile or dynamic network configurations.
Research Gaps and Our Contribution
As summarized in Table 2, existing protocols either focus on singular performance aspects or introduce excessive complexity. The proposed ACRLPC framework addresses these gaps by combining the following:
Table 2.
Comparative analysis of UWSN MAC protocols.
- Hybrid CSMA/CA-TDMA channel access.
- Actor–Critic RL for dynamic adaptation.
- Optimized power control.
- Lightweight synchronization.
This integrated approach achieves superior energy efficiency while maintaining low latency and high reliability in dynamic underwater environments.
3. System Model
Designing an effective MAC layer protocol in UWSNs is essential to enhance energy efficiency, throughput, and network reliability. The suggested framework combines a ’hybrid TDMA and CSMA-CA architecture’ to benefit from the strengths of each method while addressing their inherent constraints. Before detailing the hybrid architecture, the following provides an explanation of the unique advantages of ’TDMA’ and ’CSMA-CA’, as well as how their combined utilization enhances the effectiveness of the proposed solution.
TDMA is a contention-free MAC protocol that allocates specific time slots, ensuring transmissions occur without collisions, to nodes, as noted by [41]. In underwater sensor networks (UWSNs), where acoustic communication experiences long propagation delays, TDMA provides several advantages. First, it enhances energy efficiency by minimizing idle listening and overhearing, as nodes only transmit during their assigned time slots. Second, it guarantees collision-free communication, unlike contention-based protocols, which boosts network throughput and reliability. Additionally, TDMA offers deterministic access, giving each node a predefined transmission opportunity, which is particularly beneficial for real-time and mission-critical applications. However, conventional TDMA faces challenges such as synchronization overhead and underutilization, especially in dynamic traffic conditions.
CSMA/CA is a contention-based protocol that requires nodes to check the channel before transmitting to avoid collisions, unlike TDMA. This protocol offers several benefits, including adaptive traffic handling, as it provides flexible channel access, making it ideal for bursty and unpredictable traffic patterns. Additionally, CSMA/CA is easier to implement than TDMA as it does not require strict synchronization mechanisms, reducing protocol complexity. Furthermore, it allows efficient utilization of the channel as any node with data to send can access the channel, maximizing resource usage. However, even with these advantages, CSMA/CA faces drawbacks, such as collisions and increased energy consumption, due to frequent channel listening and retransmissions.
The ’hybrid MAC architecture’ strategically combines TDMA and CSMA-CA to optimize the MAC layer-based performance in UWSNs using a customized ’superframe’. The ’superframe structure’ consists of the following:
- TDMA Period: Allocated for periodic and high-priority data transmissions, ensuring deterministic and collision-free access.
- CSMA-CA Period: Designed for dynamic and event-driven transmissions, allowing flexible access for bursty traffic.
- Inactive Period: Nodes enter a low-power mode to conserve energy when no transmissions are required.
By incorporating this hybrid structure, the proposed framework enhances energy efficiency, throughput, and adaptability to varying network conditions. The integration of TDMA ensures efficient channel allocation, while CSMA-CA handles unexpected traffic variations, providing a balanced MAC solution. The optimized UWSN communication channel employs a hybrid MAC protocol that combines CSMA/CA and TDMA, as shown in Figure 3. This framework integrates an AAC-RL strategy with Communication Channel-Optimized Adaptive Power Control (ACRLCPC), enabling dynamic adjustment of network parameters in response to the evolving conditions of the underwater environment.
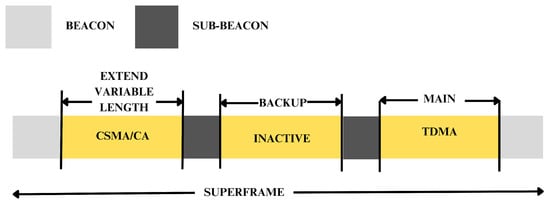
Figure 3.
Proposed hybrid TDMA and CSMA-CA MAC architecture for UWSNs.
The proposed hybrid MAC protocol’s mathematical modeling formulation combines the mathematical models of CSMA/CA and TDMA to efficiently control channel access. The system operates by adapting to varying network loads, utilizing CSMA/CA in low-load conditions and TDMA in high-load conditions to ensure efficient communication. Both of these adaptions are defined in specific mathematical models, as described in the following text.
In CSMA/CA, the probability of transmission, , is modeled as a function of the contention window size, W, and the transmission attempt probability, p. The transmission probability is given by the following:
where
- -
- p is the probability of a node attempting to transmit in a given time slot,
- -
- W is the contention window size.
The probability of successful transmission, denoted as , is defined as the likelihood that no competing node initiates transmission within the same time slot. This probability can be mathematically expressed as follows:
Here, N denotes the total number of nodes attempting to transmit within the same time slot.
In the TDMA protocol, the communication timeline is partitioned into discrete time slots, with each node assigned a dedicated slot for data transmission. Let denote the duration of a complete frame, and let slot the duration of an individual time slot. The total number of slots per frame, represented by S, can then be calculated as follows:
where
- -
- frame represents the total duration of a complete TDMA frame.
- -
- slot denotes the duration allocated to each individual time slot within the frame.
In this scenario, each node is assigned a time slot such that no collisions occur, and the transmission within each time slot is guaranteed to be collision-free. The probability of a successful transmission in TDMA, , is as follows:
where
- -
- is the probability of collision for node i, which is zero in a well-synchronized TDMA system where each node has a dedicated time slot.
The mathematical modeling of the hybrid architecture switches between CSMA/CA and TDMA depending on the network load. Let L denote the network load, where L is the ratio of the total count of currently active nodes to the total number of nodes. If , CSMA/CA is used, and, if , TDMA is used.
The switching condition is given by the following:
where
- -
- is the number of active nodes.
- -
- N is the total number of nodes in the network.
When crosses the threshold, the system switches from CSMA/CA to TDMA, ensuring optimal performance for both low and high network loads.
To mathematically formulate the optimization model of energy efficiency, each node adjusts its transmission power based on environmental conditions, such as path loss, depth, and temperature. The transmission power of a node is modeled as a function of the distance d to the receiver, the path loss exponent , and the environmental factors :
where
- -
- is the base transmission power.
- -
- is the reference distance.
- -
- is the path loss exponent.
- -
- represents environmental conditions affecting signal strength.
By dynamically adjusting the transmission power, the system can minimize energy consumption while ensuring reliable communication.
Network architecture model formulation was the subsequent step to then give due consideration. To elaborate on this specific aspect, the initial considered scenario (Figure 1) needed to be briefly outlined again. The UWSN consists of sensor nodes positioned at different underwater sites, creating a multihop communication topology. The system time is divided into superframes, each composed of a beacon frame; a control period (CP), which is referred to as a BEACON; and a data transmission period (DTP). The system operates on K orthogonal channels, with each node selecting a channel during the CP and using it for communication during the DTP.
The hybrid MAC protocol combines CSMA/CA and TDMA to manage channel access efficiently. CSMA/CA is used in low-load conditions to avoid unnecessary transmission collisions, while TDMA is used for guaranteed collision-free transmission when the load is high. This dual approach optimizes the network’s throughput and reduces interference.
The adaptive power control is another aspect that is worthy of discussing here. The adaptive ability is achieved using reinforcement learning, where each node dynamically adjusts its wake-up schedules and transmission power based on environmental conditions (such as path loss, depth, and temperature). Actor–Critic RL is employed to optimize network performance, ensuring efficient energy use and avoiding collisions in varying sensor node locations.
3.1. Optimization Model Mathematical Formulation
Let the set of sensor nodes be denoted by , and let the set of available channels be denoted by . The network’s objective is to optimize channel allocation and power control while minimizing collisions and energy consumption.
The optimization problem is formulated as follows:
where is the probability of successful transmission on channel k for node i at time t; is the indicator function that equals 1 if node i is assigned to channel k at time t; and 0 otherwise.
The reward function for the Actor–Critic RL is given by the following:
where and are constants, and represents the energy consumption of node i at time t.
3.2. AC-RL-Based Power Control (ACRLPC) Framework
In this system, the Actor–Critic RL model optimizes the channel allocation policy by balancing exploration and exploitation. The action at each time step is selected based on the policy , and the value function is updated according to the Bellman equation:
where is the discount factor, is the transition probability, and is the reward function.
The optimal policy is derived as follows:
where is the action-value function, which is updated by the RL agent to reflect the expected cumulative reward.
3.3. Energy Efficiency and Reliability
The framework optimizes energy efficiency by dynamically adjusting, depending on the distance between nodes and the environmental conditions, the transmission power. This is expressed as follows:
where is the energy efficiency factor, is the transmission power of node i, and is the distance between node i and its communication partner.
3.4. Summarizing the System Model
The system model being proposed combines a hybrid MAC protocol with adaptive power control and RL-based optimization to tackle the obstacles in underwater communication. The mathematical model captures the changing conditions of the environment and offers a strong solution for enhancing throughput, minimizing collisions, and improving energy efficiency in UWSNs. Table 3 presents the key input parameters used in the AC-RL-based optimization component of the proposed MAC framework.
Table 3.
Input parameters for AC-RL-based optimization in the proposed MAC framework.
4. Results and Discussion
A performance analysis for the proposed hybrid MAC protocol integration that utilizes CSMA/CA and TDMA in UWSN communication will be carried out in this section. The results illustrate the effects of multiple network properties on the throughput, energy efficiency, and collision prevention. In addition, we will discuss the performance of the system in relation to the adaptability of the system to changes in the network load conditions and articulate how the hybrid protocol performs and maintains good communication capabilities, even with the influence of potentially adverse environmental parameters.
Finally, we highlight the performance of the system through a number of benchmarks to investigate it against state-of-the-art protocols in consideration of certain constraints, like energy consumption, transmission success rate, and scalability. The following subsections provide results of envy evaluation for various benchmark scenarios, showcasing that the proposed approach significantly outperforms the methods based on the evolution of envy per round.
- Benchmark 1
In general, this benchmark, as outlined in [26], more specifically considers the WSN-based scenario. The proposed framework has solved one of the critical issues for performance enhancement: real scenario implementation of WSNs with limited power. This means energy efficiency improvement is their main focus. In addition to energy efficiency, maximum throughput, i.e., another performance metric for transmission, is also considered for maximized performance. Summarizing this point, ref. [26] broached the factors of employing a hybrid protocol that consists of TDMA and CSMA at the MAC layer for WSNs. High-level data frameworks enable concurrent transmission, mitigating solving both of the problems. This hybrid approach makes use of both TDMA and CSMA for more optimized network performance. They also present a new power control, which guarantees more energy saving and efficient usage of transmission slots.
- Benchmark 2
The second benchmark [42] shows how far the developers have achieved developing underwater full-duplex sensors, which is one of the key technologies (currently) feasible due to the narrow bandwidth and long end-to-end transmission delays in UASNs. Based on the proposed framework, they have proposed a machine learning-based duplex MAC protocol for single-hop underwater acoustic sensor networks. But, much more importantly, it can also help to optimize throughput, delay, and access fairness.
The benchmark guidelines introduce a protocol that has independent procedures to access the medium for uplink and downlink transmissions adapted to their use cases. The downlink access scheme is contention-free as a means to ensure that collision of command information to the sensor nodes could be minimized. A hybrid access scheme is adopted in the uplink to improve the network throughput and meet the transmission demand generated due to monitoring the data observation of sensor nodes. This keeps transmission resources flowing in a more efficient and just manner.
The newly established communication benchmark [42] also introduces, into the MAC protocol, the design of a special propagation time imperfection that exists only in underwater acoustic communication. The numerical results and performance comparison show that the new proposed protocol outperforms all existing state-of-the-art MAC protocols in UWSNs in terms of the throughput, end-to-end time delay, and transmission fairness.
- Benchmark 3
The third benchmark [43] focuses on the unmanned exploration and exploitation of the oceans of the Earth, compelling interests in developing more robust methods for unmanned underwater mobile vehicles management and relevant task scheduling. But, for these unmanned vehicles as nodes, due to their displacement, a number of methods are struggling to minimize the amount of signaling, and thus delays [43,44]. As such, they have not produced an adaptive solution that is highly efficient in multiple conditions-based scenarios. Due to the mobility of nodes and specific characteristics of the underwater channel, the signaling of free MAC design introduced in a new manner already adapts to regularly changing conditions as signaling incurs delays.
With multi-agent reinforcement learning, based on the UW-ALOHA-QM protocol [43], this benchmark gives nodes the ability to interact with the dynamic underwater wireless environment in a trial-and-error manner. This provides additional resilience and flexibility to the network. In order to assess our approach, they carried out multiple simulations based on four greatly varying scenarios, it is a known fact that each where nodes move differently [45,46,47]. This demonstrated an improvement of 300% in the channel utilization of the UW-ALOHA-QM Protocol compared to existing mobile network protocols.
4.1. Comparison of the Energy Consumption
We also compared the various frameworks using energy consumption metrics, as shown in Figure 4. The results indicate that the energy consumption of the ACRLPC framework is less than that with other constraints in energy, like 120 Joules. The highest energy of 160 Joules was consumed by the UW-ALOHA-QM framework. The high diversity in rapid growth demonstrates the efficiency of the ACRLPC framework, which may prove advantageous in contexts where conserving energy is the leading concern. Intermediate energy consumption results for the FDU-MAC and TCH-MAC frameworks are 135 Joules and 120 Joules measured in this case, respectively. These results illustrate that both of the frameworks outperform UW-ALOHA-QM but still yield lower energy efficiency in comparison to the ACRLPC.
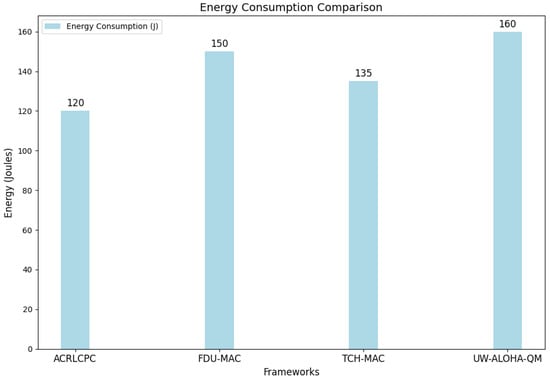
Figure 4.
Energy consumption comparison of ACRLCPC with benchmark techniques.
4.2. Throughput Comparison
Figure 5 reveals the throughput comparison, where all frameworks showed a relatively higher throughput; ACRLPC enabled a peak throughput of 95 Mbps and TCH-MAC closely followed with a throughput of 90 Mbps. FDU-MAC dropped slightly, obtaining a throughput of 85 Mbps, whereas UW-ALOHA-QM had the lowest throughput of 80 Mbps. This outcome shows that while ACRLPC achieved better throughput than TCH-MAC, TCH-MAC was also competitive with ACRLPC and that both of these schemes outperformed FDU-MAC and UW-ALOHA-QM. When throughput is essential for high data rates, then the server can either use LRMAC, ACRLPC, and TCH-MAC, which make them suitable for these types of environments.
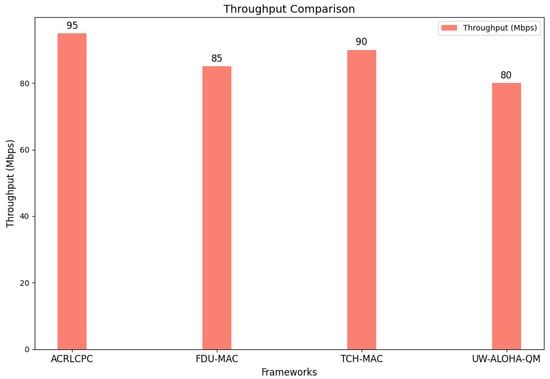
Figure 5.
Throughput comparison of ACRLCPC with benchmark techniques.
4.3. Computation Accuracy Comparison
As indicated in Figure 6, the accuracy comparison suggested that the ACRLPC framework outperformed its counterparts with an accuracy of 92%. TCH-MAC was second with an accuracy of 88%, and FDU-MAC and UW-ALOHA-QM were slightly less accurate at 85% and 80%, respectively. Moreover, ACRLPC achieved a higher accuracy in comparison to the other techniques, which was due to its optimization mechanisms that improve the overall performance and trustworthiness of the model. Although ACRLPC provided a higher recall than TCH-MAC, TCH-MAC showed itself to be more effective than ACRLPC in providing a good balance between throughput and accuracy.
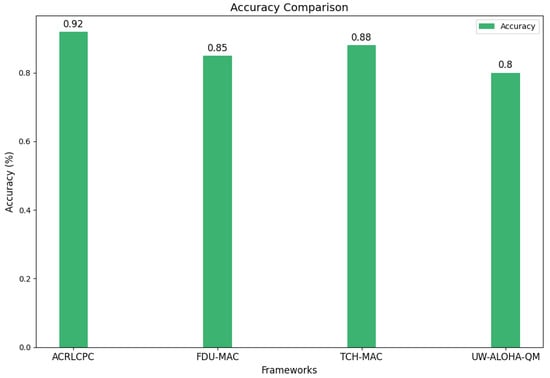
Figure 6.
Accuracy comparison of ACRLCPC with benchmark techniques.
4.4. Latency Comparison
The latency comparison shown in Figure 7 depicts how long each framework took to respond, which is one of the widely compared key Performance Indices (KPIs) [48,49,50]. The latency of ACRLPC was 30 ms, which was much lower than the others in the framework. The latencies for FDU-MAC and TCH-MAC were 50 ms and 40 ms, respectively, and 60 ms for UW-ALOHA-QM. In real-time applications, a lower latency is much preferred; thus, ACRLPC outperformed the other algorithms in this event and can be considered a good choice for time-sensitive tasks. FDU-MAC is competitive with TCH-MAC, but UW-ALOHA-QM suffers from a much higher latency that could limit its usefulness in these types of applications.
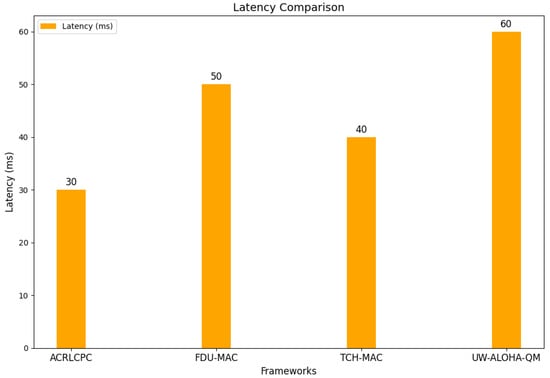
Figure 7.
Latency comparison of ACRLCPC with benchmark techniques.
4.5. Analysis of the Computational Complexity
In this section, we will analyze the computational complexity of the ACRLPC framework in comparison to the three benchmark methods (FDU-MAC, TCH-MAC, and UW-ALOHA-QM). The main motivation behind this comparison was to analyze the computational efficiency of the ACRLPC framework compared to these other methods. This paper provides both theoretical derivation of orders of computational complexity and empirical validation through views plots.
4.5.1. The Orders of Computational Complexity: Mathematical Derivation
The four methods contemplated exhibit unique computational complexity properties, discernible from their respective algorithms:
- ACRLPC Framework: The computational complexity of the ACRLPC framework mainly relies on the number of operations needed to measure energy consumption, throughput, accuracy and latency. The complexity for a system to collate N data points is owing to how sorting and aggregate operations are implemented in the system—in other words, how the system is designed. The ACRLPC architecture has been tuned to minimize overhead, resulting in decreased computational cost compared to legacy systems.
- FDU-MAC: A frequency division multiplexing-based framework with a complexity of was mainly constructed because of the need for parallel frequency assignment and coordination between nodes in the network. The fundamental overhead associated with handling various frequency bands makes it more computationally intensive than the ACRLPC framework.
- TCH-MAC: The channel multiplexing techniques based on time division cause a computational burden of since this is a resource allocation-based scheme, where time slots are assigned to each user in the network. While the time-slot allocation process, as well as synchronization, introduces additional complexity, our protocol is still less efficient than the ACRLPC framework.
- UW-ALOHA-QM: The computational complexity of the UW-ALOHA-QM framework is since it adopts a simpler random access mechanism. But the visual comparison metrics between the throughput and accuracy showed that the performance was lower due to the simplicity that it offers.
4.5.2. Empirical Performance and Computational Complexity Discussion
Figure 8 plots the actual computational complexity for each framework and validates the orders of the computational complexity in the theoretical analysis. This common graph allows for a test of how good this view of computational complexity was voted.
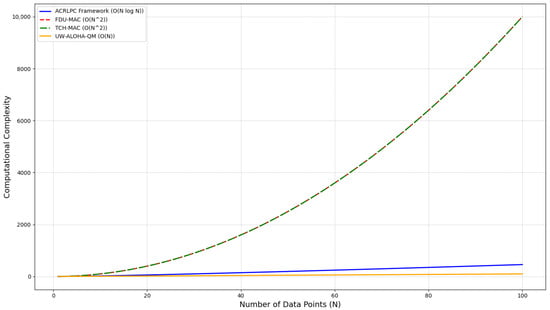
Figure 8.
Computational complexity comparison of the ACRLPC framework and benchmark methods.
It is clear from the plot that the following observations can be made:
- The ACRLPC framework (solid blue line) has a computational complexity of . This rate of growth is slower than that of a complexity with , thus computationally establishing the greater efficiency of the ACRLPC framework (where the system is expected to be expanded on larger datasets).
- The FDU-MAC (red dashed line) and TCH-MAC (green dashdot line) frameworks present a quadratic order () behavior regarding computational complexity. This indicates that they require growing computational resources from the system, and, when a system scales up, they are less applicable in such large-scale applications where calculation speed is the main concern.
- The UW-ALOHA-QM framework (as indicated by the solid orange line) is linear in its growth of computational complexity (). The ACRLPC framework outperforms this system both in terms of throughput and accuracy metrics, even though the adopted structure is relatively more efficient.
It is evident that the ACRLPC framework is scalable (both theoretically and practically) and computationally cheaper than the other three methods. The ACRLPC framework has a slow growth rate, which allows it to have a very low resource consumption for larger datasets.
5. Conclusions
The comparative performance on the energy consumption, throughput, accuracy, latency, and computational complexity of the proposed ACRLPC framework with a few other relevant frameworks has led to some interesting insights worth sharing. As illustrated in the results, ACRLPC was found to be superior to the others under most metrics. It was the most energy efficient, achieving the fastest throughput+accuracy+latency at the lowest energy cost to make it. These results highlight the needs of energy efficiency and performance optimization at the level of network framework components. The TCH-MAC framework managed to produce competitive throughput and accuracy compared to the other frameworks, and, even with relatively more energy consumed, it is still a strong candidate for situations when throughput is the dominant concern. Although FDU-MAC and UW-ALOHA-QM give reasonable delays in some cases, due to their higher energy consumption and latency, they are only capable of tackling less performance-sensitive cases. An in-depth analysis of how various factors impact the implementation of these frameworks is crucial to achieving a balanced trade-off between energy consumption, throughput, accuracy, latency, and computational complexity. This understanding is essential for identifying the strengths and limitations of each framework. However, future research should focus on further optimizing these frameworks, exploring hybrid models that integrate the distinct advantages of different approaches. For example, incorporating techniques, such as edge learning, and leveraging emerging smart distributed infrastructures could offer significant improvements.
Author Contributions
Conceptualization, W.U.R. and Q.G.; methodology, W.U.R. and F.Z.; software, W.U.R. and M.A.; validation, Q.G., F.Z. and S.Z.X.; formal analysis, W.A. and M.T.; investigation, W.U.R. and M.I.K.; resources, Q.G. and F.Z.; data curation, M.A. and S.Z.X.; writing—original draft preparation, W.U.R.; writing—review and editing, F.Z. and M.T.; visualization, W.A.; supervision, Q.G.; project administration, F.Z.; funding acquisition, Q.G. All authors have read and agreed to the published version of the manuscript.
Funding
This research is funded and supported by the Fundamental Research Funds for the Central Universities No. 3072025Z0502 and Heilongjiang Provincial Natural Science Foundation JQ2023A004.
Data Availability Statement
Dataset available on request from the authors.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Fan, R.; Boukerche, A.; Pan, P.; Jin, Z.; Su, Y.; Dou, F. Secure Localization for Underwater Wireless Sensor Networks via AUV Cooperative Beamforming with Reinforcement Learning. IEEE Trans. Mob. Comput. 2024, 24, 924–938. [Google Scholar] [CrossRef]
- Alhassan, I.B.; Mitchell, P.D. Packet flow-based reinforcement learning MAC protocol for underwater acoustic sensor networks. Sensors 2021, 21, 2284. [Google Scholar] [CrossRef] [PubMed]
- Hsu, T.-H.; Yen, P.-Y. Adaptive Time Division Multiple Access Based Medium Access Control Protocol for Energy Conserving and Data Transmission in Wireless Sensor Networks. IET Commun. 2011, 5, 2662–2672. [Google Scholar] [CrossRef]
- Khan, Z.U.; Gang, Q.; Muhammad, A.; Muzzammil, M.; Khan, S.U.; El Affendi, M.; Ali, G.; Ullah, I.; Khan, J. RETRACTED: A Comprehensive Survey of Energy-Efficient MAC and Routing Protocols for Underwater Wireless Sensor Networks. Electronics 2022, 11, 3015. [Google Scholar] [CrossRef]
- Alfouzan, F.A.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. An Energy-Conserving Collision-Free MAC Protocol for Underwater Sensor Networks. IEEE Access 2019, 7, 27155–27171. [Google Scholar] [CrossRef]
- Alablani, I.A.; Arafah, M.A. EE-UWSNs: A Joint Energy-Efficient MAC and Routing Protocol for Underwater Sensor Networks. J. Mar. Sci. Eng. 2022, 10, 488. [Google Scholar] [CrossRef]
- Wang, Y.; Shang, F.; Lei, J. Reliability optimization for channel resource allocation in multihop wireless network: A multigranularity deep reinforcement learning approach. IEEE Internet Things J. 2022, 9, 19971–19987. [Google Scholar] [CrossRef]
- Guqhaiman, A.A.; Akanbi, O.; Aljaedi, A.; Alharbi, A.R.; Chow, C.E. DAMAC: A Delay-Aware MAC Protocol for Ad Hoc Underwater Acoustic Sensor Networks. Sensors 2021, 21, 5229. [Google Scholar] [CrossRef]
- Liu, S.; Adil, M.; Ma, L.; Mazhar, S.; Qiao, G. DenseNet-Based Robust Channel Estimation in OFDM for Improving Underwater Acoustic Communication. IEEE J. Ocean. Eng. 2025, 50, 1518–1537. [Google Scholar] [CrossRef]
- Rahman, W.U.; Gang, Q.; Zhou, F.; Tahir, M.; Ali, W.; Adil, M.; Khattak, M.I. Deep Q-Learning Based Adaptive MAC Protocol with Collision Avoidance and Efficient Power Control for UWSNs. J. Mar. Sci. Eng. 2025, 13, 616. [Google Scholar] [CrossRef]
- Liu, H.; Ma, L.; Wang, Z.; Qiao, G. Channel prediction for underwater acoustic communication: A review and performance evaluation of algorithms. Remote Sens. 2024, 16, 1546. [Google Scholar] [CrossRef]
- Liu, B.; Huang, S.; Zheng, B.; Chen, X.; Zhao, J.; Qi, X.; Liu, S. Tunable composite lattice structure for low-frequency and ultra-broadband underwater sound absorption. J. Acoust. Soc. Am. 2023, 153, 415–422. [Google Scholar] [CrossRef] [PubMed]
- Chen, Y.; Jin, Z.; Xing, G.; Zeng, Q.; Chen, Y.; Zhou, Z. An Energy-Efficient MAC Protocol for Three-Dimensional Underwater Acoustic Sensor Networks With Time Synchronization and Power Control. IEEE Access 2023, 11, 20842–20860. [Google Scholar] [CrossRef]
- Bharany, S.; Sharma, S.; Alsharabi, N.; Tag, E.; Ghamry, E.N.A. Energy-efficient clustering protocol for underwater wireless sensor networks using optimized glowworm swarm optimization. Front. Mar. Sci. 2023, 10, 1117787. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Luo, H.; Wu, K.; Ruby, R.; Hong, F.; Guo, Z.; Ni, L.M. Simulation and experimentation platforms for underwater acoustic sensor networks: Advancements and challenges. ACM Comput. Surv. (CSUR) 2017, 50, 28. [Google Scholar] [CrossRef]
- Luo, J.; Fan, L.; Wu, S.; Yan, X. Research on localization algorithms based on acoustic communication for underwater sensor networks. Sensors 2018, 18, 67. [Google Scholar] [CrossRef]
- Tian, X.; Du, X.; Wang, L. MAC protocol of underwater acoustic network based on state coloring. Chin. J. Sens. Technol. 2023, 36, 24–134. [Google Scholar]
- Noh, Y.; Lee, U.; Han, S.; Wang, P.; Torres, D.; Kim, J. DOTS: A Propagation Delay-Aware Opportunistic MAC Protocol for Mobile Underwater Networks. IEEE Trans. Mob. Comput. 2014, 13, 766–782. [Google Scholar] [CrossRef]
- Zhang, Y.; Chen, H.; Xu, W. A Load-Adaptive CSMA/CA MAC Protocol for Mobile Underwater Acoustic Sensor Networks. In Proceedings of the 2018 10th International Conference on Wireless Communications and Signal Processing (WCSP), Hangzhou, China, 18–20 October 2018; pp. 1–7. [Google Scholar]
- Mao, J.; Chen, S.; Yu, J.; Gu, Y.; Yu, R.; Xu, Y. LTM-MAC: A location-based TDMA MAC protocol for mobile underwater networks. In Proceedings of the OCEANS 2016, Shanghai, China, 10–13 April 2016; pp. 1–5. [Google Scholar]
- Khattak, M.I.; Yuan, H.; Khan, A.; Ahmad, A.; Ullah, I.; Ahmed, M. Evolving Multi-Access Edge Computing (MEC) for Diverse Ubiquitous Resources Utilization: A Survey; Telecommunication Systems; Springer: Berlin/Heidelberg, Germany, 2025; Volume 88. [Google Scholar]
- Islam, K.Y.; Ahmad, I.; Habibi, D.; Waqar, A. A survey on energy efficiency in underwater wireless communications. J. Netw. Comput. Appl. 2022, 198, 103295. [Google Scholar] [CrossRef]
- Ma, G.; Shen, X.; Wang, H.; Ma, S. Clustering Quantization ShortTime Energy Feature Extraction Method for MAC Protocol Identification in Non-cooperative UWANs. In Proceedings of the 2022 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 25–27 October 2022. [Google Scholar]
- Jouhari, M.; Ibrahimi, K.; Tembine, H.; Ben-Othman, J. Underwater Wireless Sensor Networks: A Survey on Enabling Technologies, Localization Protocols, and Internet of Underwater Things. IEEE Access 2019, 7, 96879–96899. [Google Scholar] [CrossRef]
- Yang, X.; Wang, L.; Xie, J.; Zhang, Z. Energy efficiency TDMA/CSMA hybrid protocol with power control for WSN. Wirel. Commun. Mob. Comput. 2018, 2018, 4168354. [Google Scholar] [CrossRef]
- Cuzme-Rodríguez, F.; Velasco-Suárez, A.; Domínguez-Limaico, M.; Suárez-Zambrano, L.; Farinango-Endara, H.; Mediavilla-Valverde, M. Application for the Study of Underwater Wireless Sensor Networks: Case Study. In Proceedings of the International Conference on Advances in Emerging Trends and Technologies, Online, 26–28 October 2022. [Google Scholar]
- Dugaev, D.; Peng, Z. RA-MAC: A Relay Assisted MAC Protocol for Energy-efficient Underwater Wireless Sensor Networks. In Proceedings of the 14th International Conference on Underwater Networks & Systems, Atlanta, GA, USA, 23–25 October 2019. [Google Scholar]
- Alfouzan, F.; Shahrabi, A.; Ghoreyshi, S.M.; Boutaleb, T. An Efficient Scalable Scheduling MAC Protocol for Underwater Sensor Networks. Sensors 2018, 18, 2806. [Google Scholar] [CrossRef]
- Roy, A.; Sarma, N. A synchronous duty-cycled reservation based MAC protocol for underwater wireless sensor networks. Digit. Commun. Netw. 2021, 7, 385–398. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, Z.; Zeng, Q.; Yang, Q. A Collision-Avoided MAC Protocol With Time Synchronization and Power Control for Underwater Sensor Networks. IEEE Sens. J. 2022, 22, 19073–19087. [Google Scholar] [CrossRef]
- Zhu, R.; Liu, L.; Li, P.; Chen, N.; Feng, L.; Yang, Q. DC-MAC: A Delay-Aware and Collision-Free MAC Protocol Based on Game Theory for Underwater Wireless Sensor Networks. IEEE Sens. J. 2024, 24, 6930–6941. [Google Scholar] [CrossRef]
- Gazi, F.; Ahmed, N.; Misra, S.; Wei, W. Reinforcement Learning-Based MAC Protocol for Underwater Multimedia Sensor Networks. ACM Trans. Sens. Netw. 2022, 18, 1–25. [Google Scholar] [CrossRef]
- Pan, X.; Liu, M.; Zhu, J.; Huo, L.; Peng, Z.; Liu, J.; Cui, J.-H. RAP-MAC: A Robust and Adaptive Pipeline MAC Protocol for Underwater Acoustic String Networks. Remote Sens. 2024, 16, 2195. [Google Scholar] [CrossRef]
- Dong, W.; Yang, Q.; Huang, X.; Chen, Y.; Sun, S.; Li, D. Research on Underwater Wireless Sensor Network and MAC Protocol and Location Algorithm. IEEE Access 2019, 7, 56606–56616. [Google Scholar]
- Wang, J.; Shen, J.; Shi, W.; Qiao, G.; Wu, S.; Wang, X. A Novel Energy-Efficient Contention-Based MAC Protocol Used for OA-UWSN. Sensors 2019, 19, 183. [Google Scholar] [CrossRef]
- Sun, N.; Wang, X.; Han, G.; Peng, Y.; Jiang, J. Collision-free and low delay MAC protocol based on multi-level quorum system in underwater wireless sensor networks. Comput. Commun. 2021, 173, 56–69. [Google Scholar] [CrossRef]
- Guo, Y.; Obaidat, M.S.; Guo, J.; Wu, T.-Y.; Tey, F.J. Adaptive Varying Contention Window MAC Protocol Based on Underwater Acoustic Propagation Delay. IEEE Sens. J. 2023, 23, 15019–15031. [Google Scholar] [CrossRef]
- Dugaev, D.; Peng, Z.; Luo, Y.; Pu, L. Reinforcement-Learning Based Dynamic Transmission Range Adjustment in Medium Access Control for Underwater Wireless Sensor Networks. Electronics 2020, 9, 1727. [Google Scholar] [CrossRef]
- Dong, Y.; Pu, L.; Luo, Y.; Peng, Z.; Mo, H.; Meng, Y.; Zhao, Y.; Zhang, Y. Receiver-Initiated Handshaking MAC Based on Traffic Estimation for Underwater Sensor Networks. Sensors 2018, 18, 3895. [Google Scholar] [CrossRef]
- Israr, I.; Yaqoob, M.M.; Javaid, N.; Qasim, U.; Khan, Z.A. Simulation Analysis of Medium Access Techniques. arXiv 2012, arXiv:1208.2406. [Google Scholar]
- Zhang, W.; Li, J.; Wan, Y.; Yao, X.; Li, M. Machine learning-based performance-efficient MAC protocol for single hop underwater acoustic sensor networks. J. Grid Comput. 2022, 20, 41. [Google Scholar] [CrossRef]
- Park, S.H.; Mitchell, P.D.; Grace, D. Reinforcement Learning Based MAC Protocol (UW-ALOHA-QM) for Mobile Underwater Acoustic Sensor Networks. IEEE Access 2021, 9, 5906–5919. [Google Scholar] [CrossRef]
- Sanchez, A.; Blanc, S.; Yuste, P.; Serrano, J.J. A low cost and high efficient acoustic modem for underwater sensor networks. In Proceedings of the OCEANS, Santander, Spain, 6–9 June 2011; pp. 1–10. [Google Scholar]
- Tomovic, S.; Radusinovic, I. DR-ALOHA-Q: A Q-Learning-Based Adaptive MAC Protocol for Underwater Acoustic Sensor Networks. Sensors 2023, 23, 4474. [Google Scholar] [CrossRef]
- Zhuo, X.; Qu, F.; Yang, H.; Wei, Y.; Wu, Y.; Li, J. Delay and Queue Aware Adaptive Scheduling- Based MAC Protocol for Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 56263–56275. [Google Scholar] [CrossRef]
- Liu, Z.; Elhanany, I. RL-MAC: A reinforcement learning based MAC protocol for wireless sensor networks. Int. J. Sens. Netw. 2006, 1, 117–124. [Google Scholar] [CrossRef]
- Chu, Y.; Mitchell, P.D.; Grace, D. ALOHA and Q-learning based MAC for wireless sensor networks. In Proceedings of the 2012 International Symposium on Wireless Communication Systems (ISWCS), Paris, France, 28–31 August 2012; pp. 511–515. [Google Scholar]
- Jin, L.; Huang, D.D. A slotted CSMA based reinforcement learning approach for extending the lifetime of underwater acoustic wireless sensor networks. Comput. Commun. 2013, 36, 1094–1099. [Google Scholar] [CrossRef]
- Park, S.H.; Mitchell, P.D.; Grace, D. Performance of the ALOHA-Q MAC protocol for underwater acoustic networks. In Proceedings of the 2018 International Conference on Computing, Electronics & Communications Engineering (iCCECE), Southend, UK, 16–17 August 2018; pp. 189–194. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).