
Analysis of Sensitivity of Distance between Embedded Ultrasonic Sensors and Signal Processing on Damage Detectability in Concrete Structures



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Experimental Program
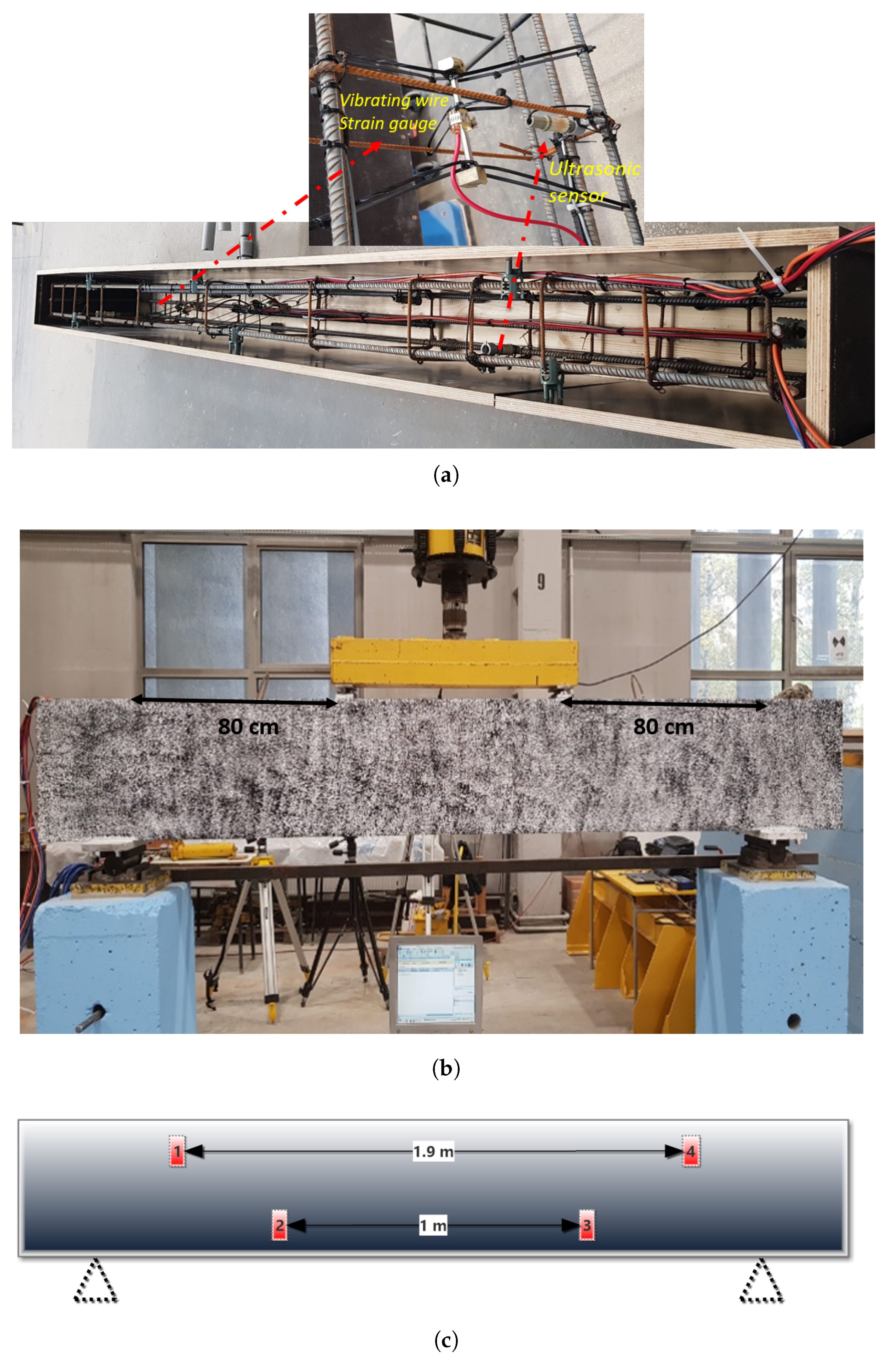
2.1. Benchmark RC Beam
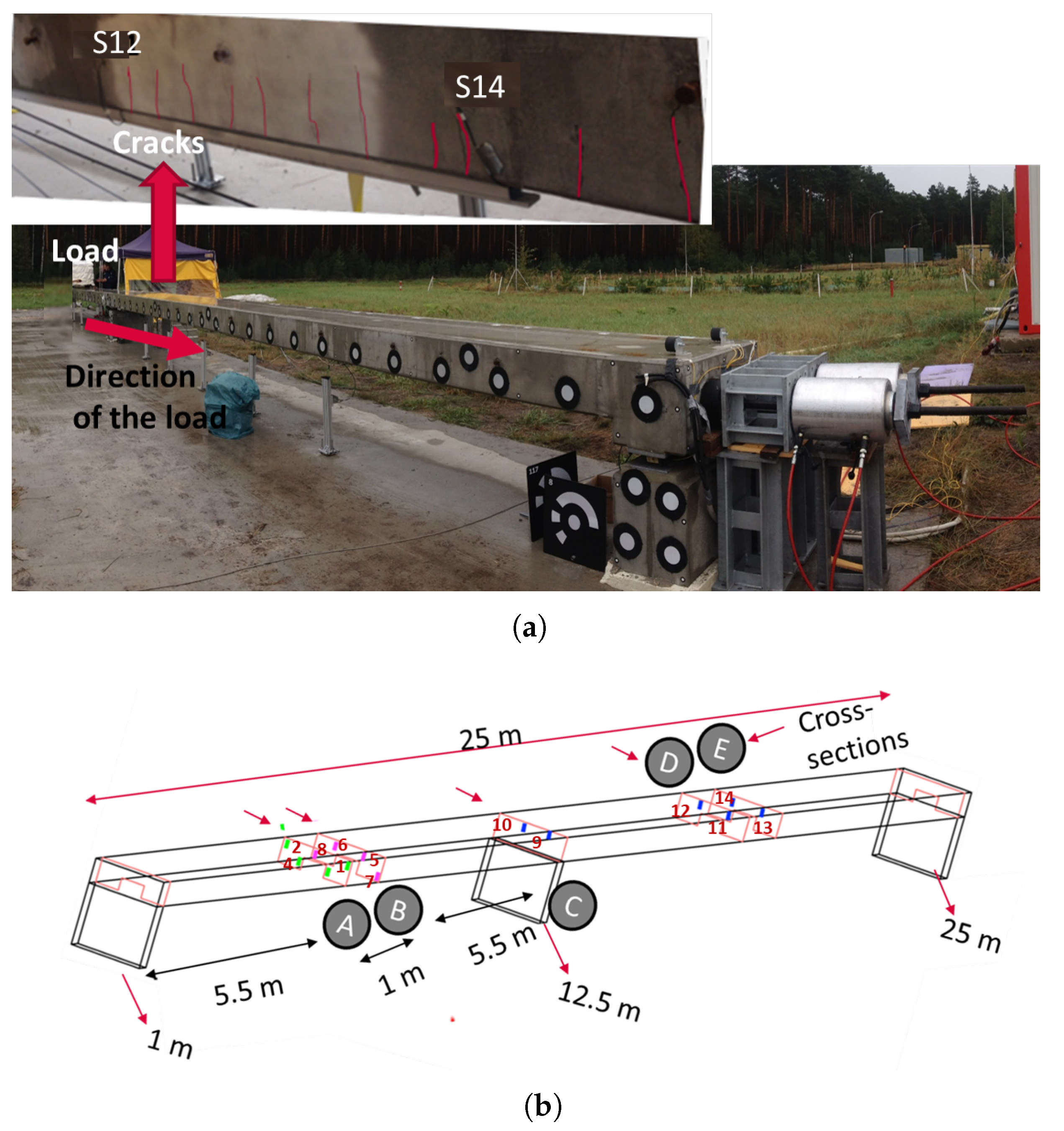
2.2. Reference Real Structure
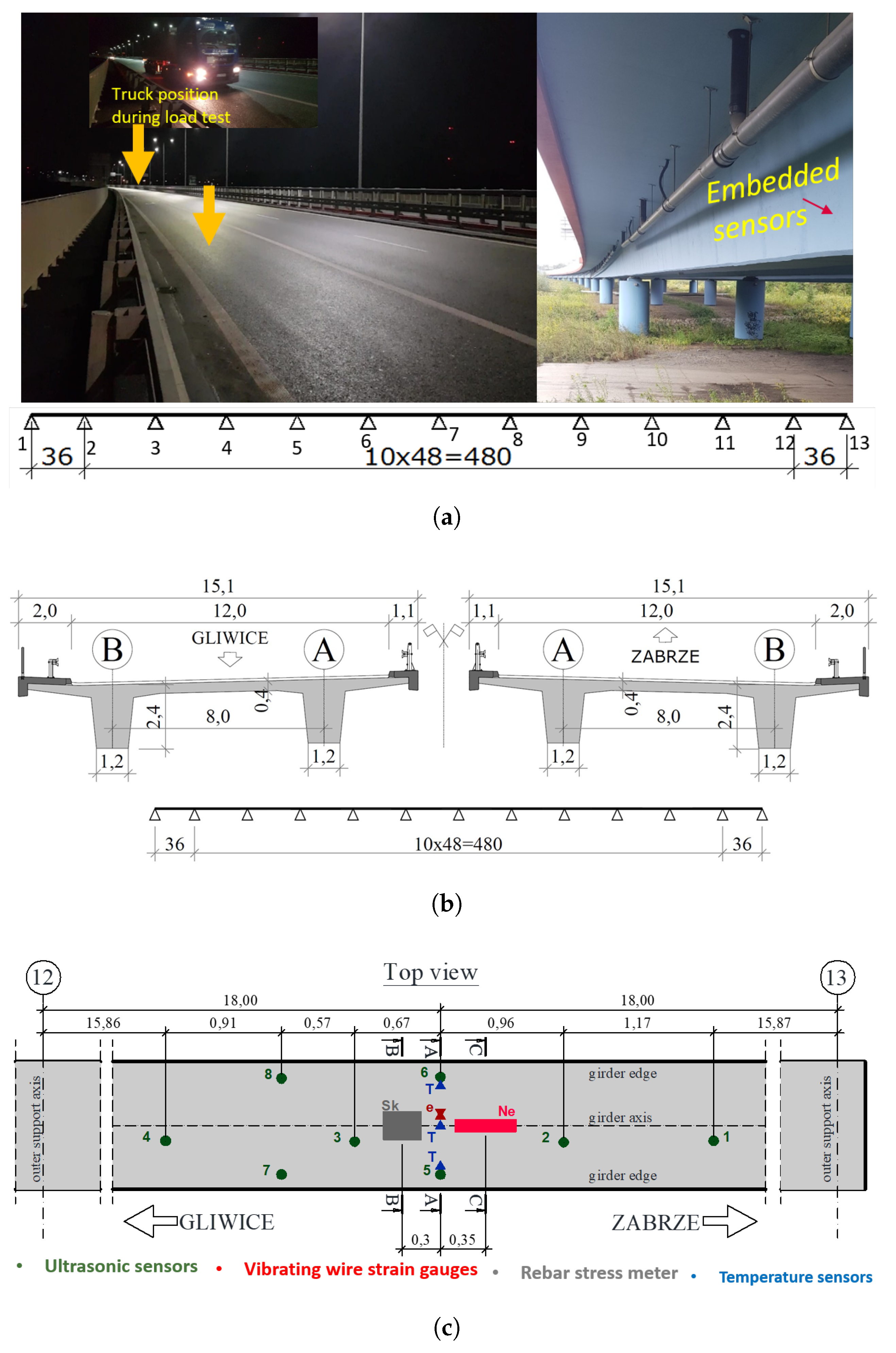
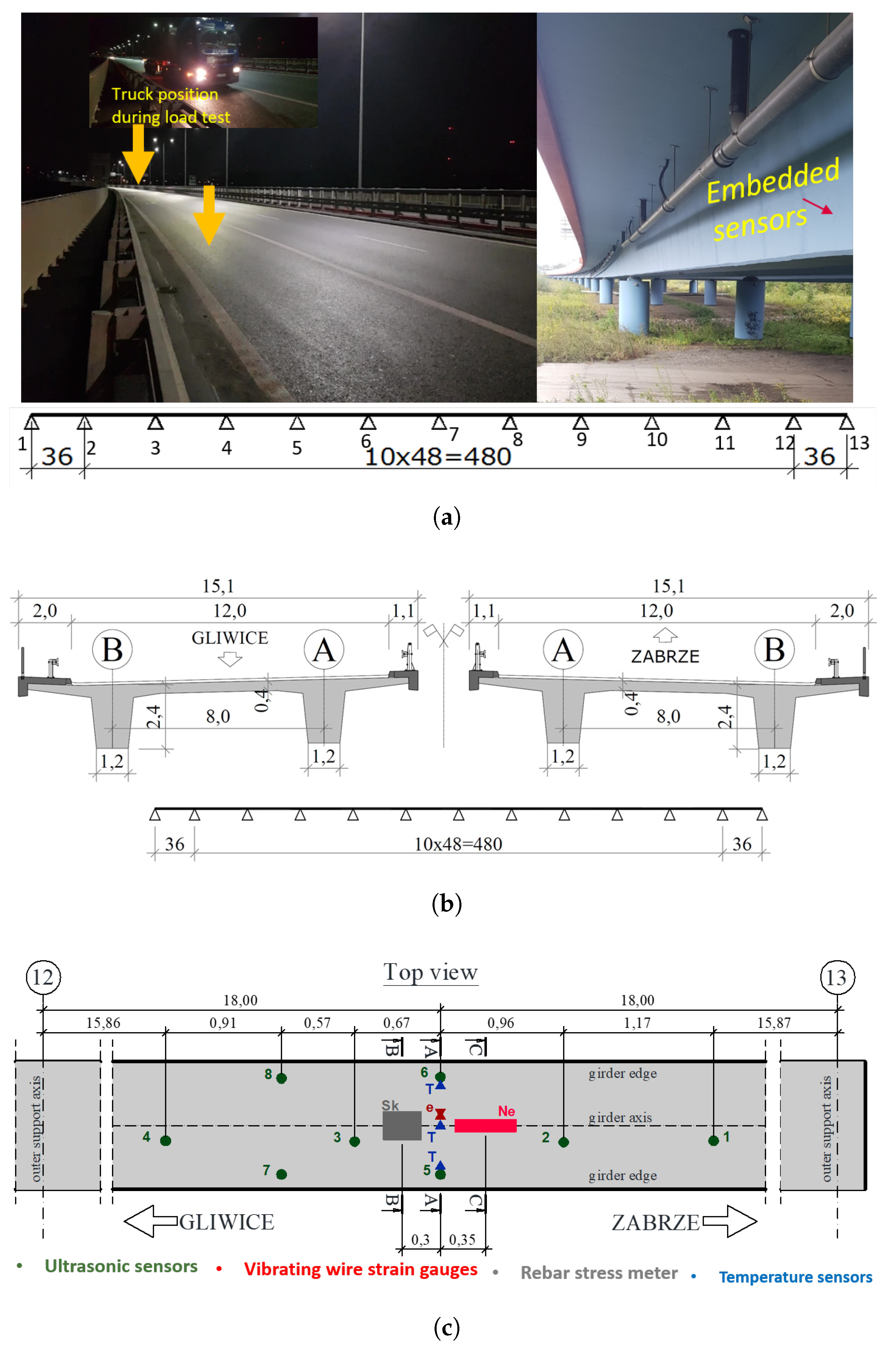
2.3. Real Bridge
3. Methodology
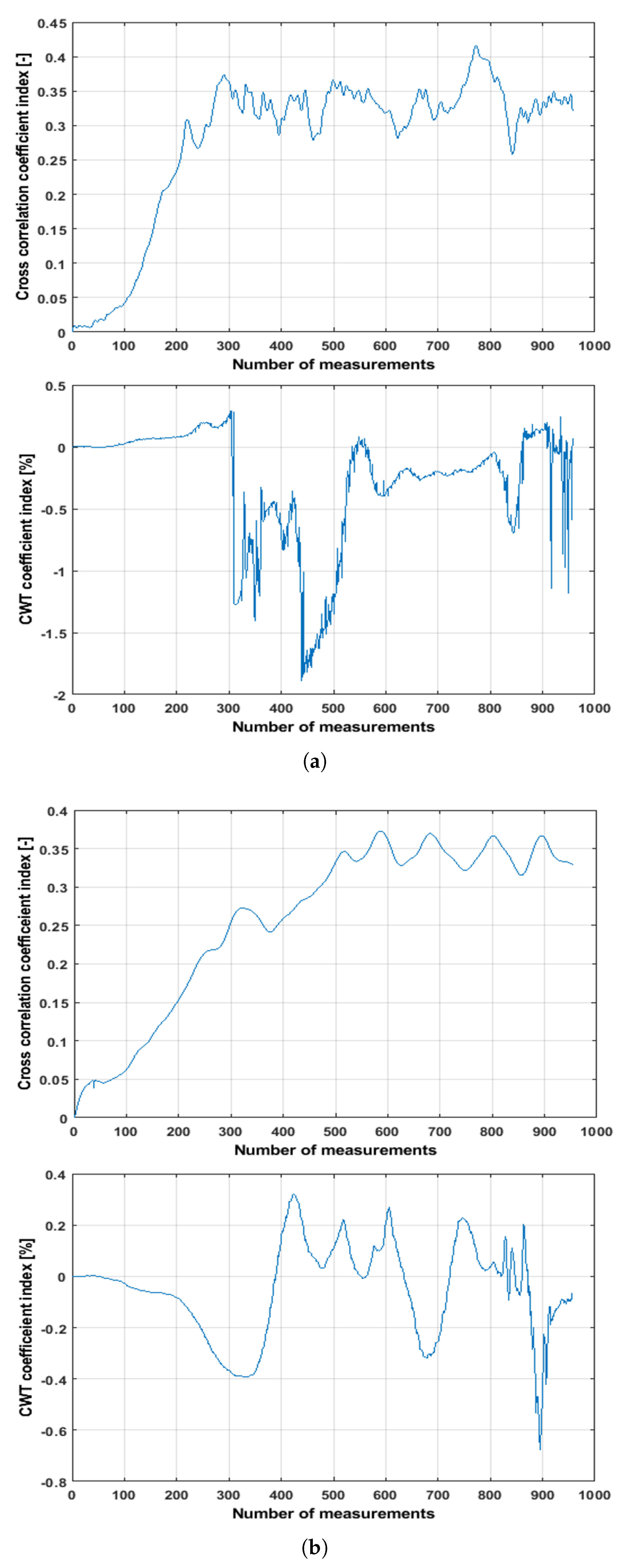
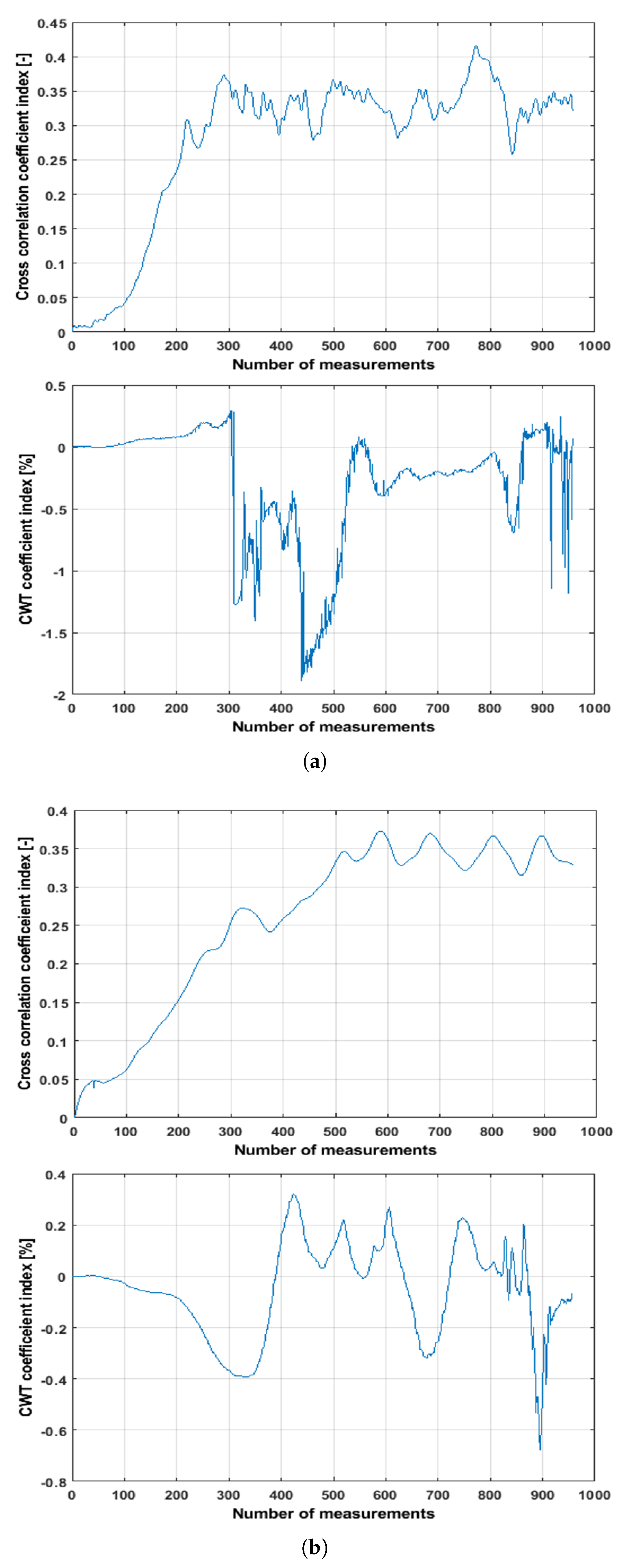
3.1. Window-Based Cross-Correlation
3.2. Continuous Wavelet Transform
4. Experimental Setup and Results
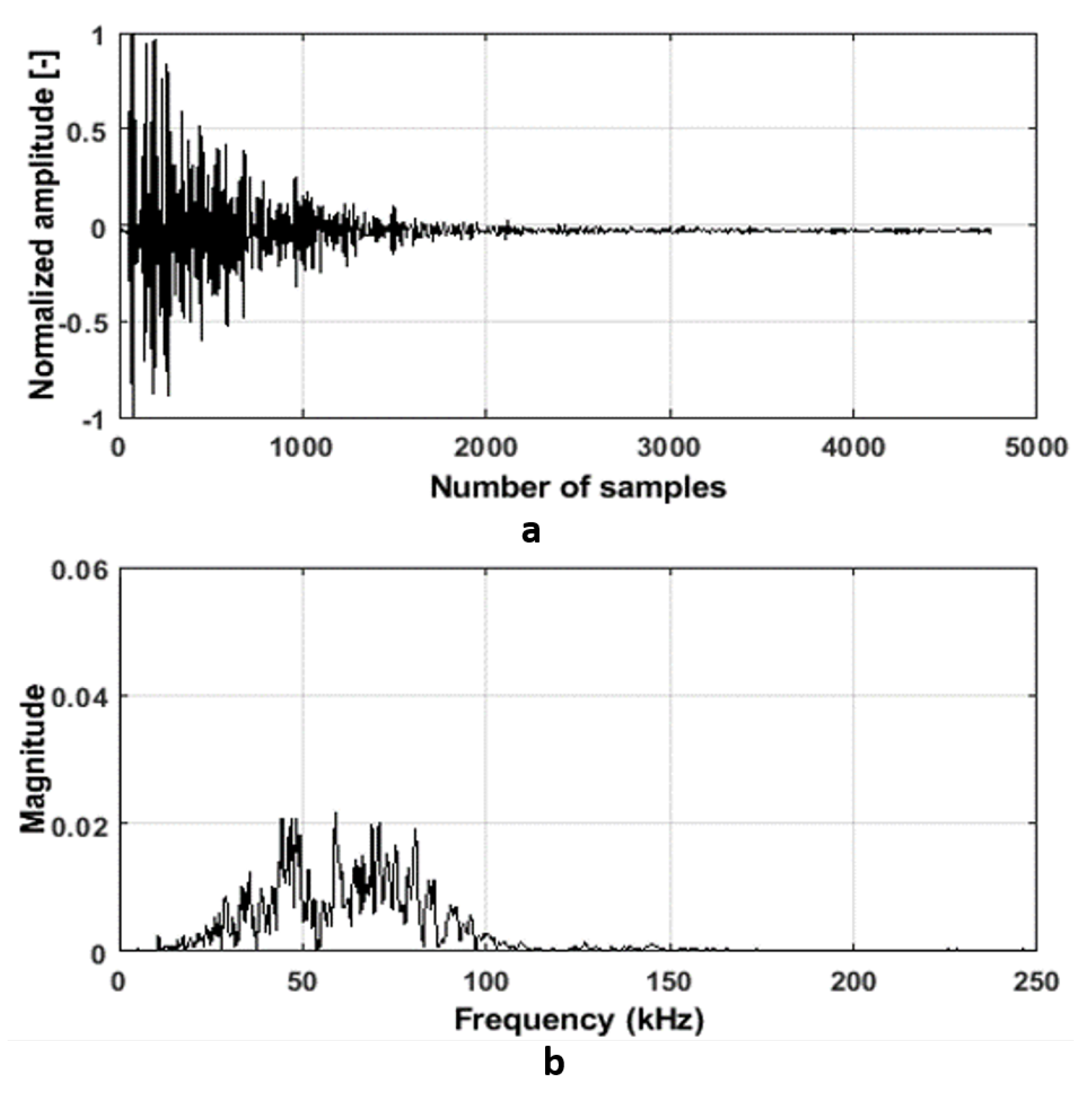
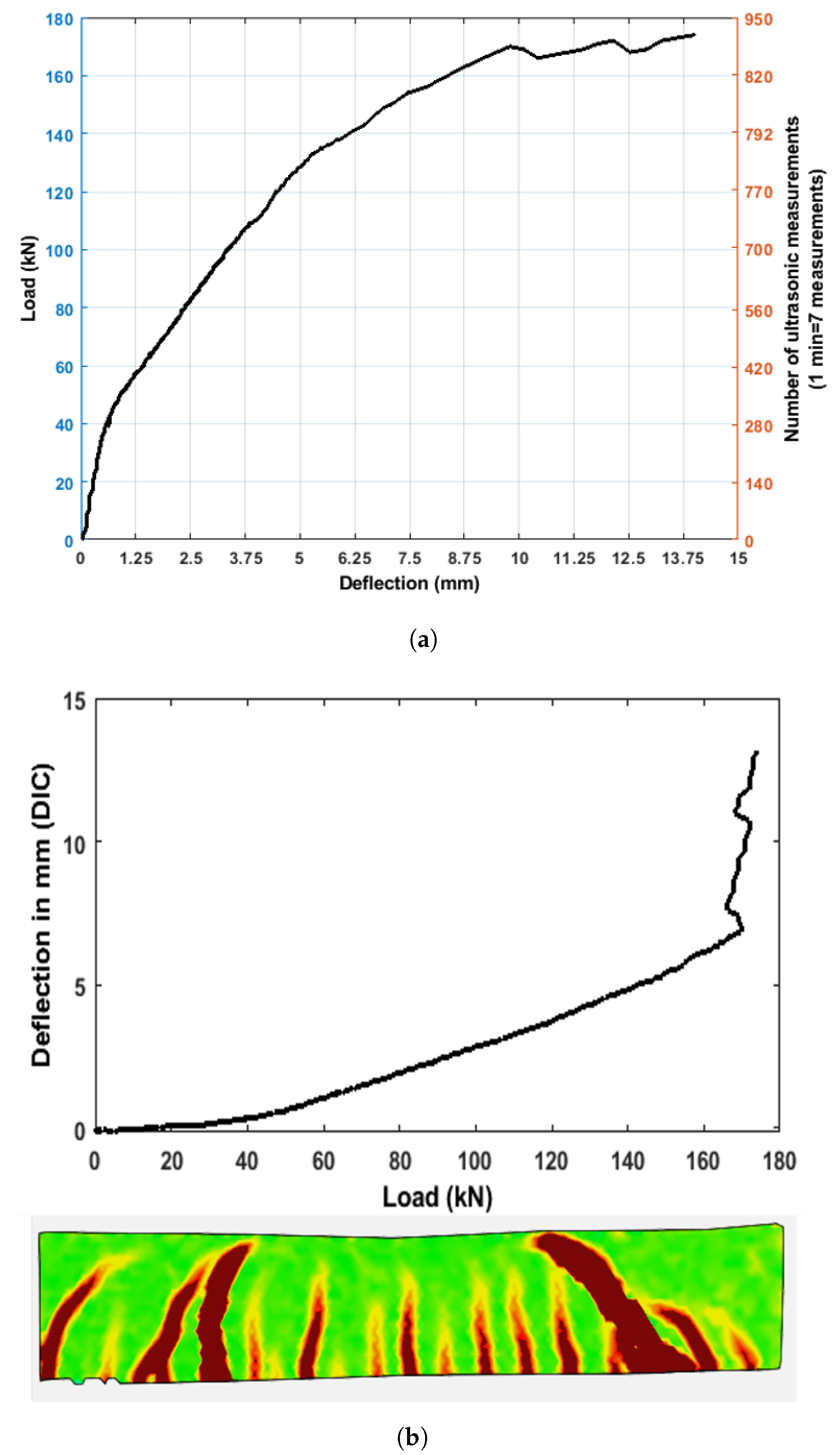
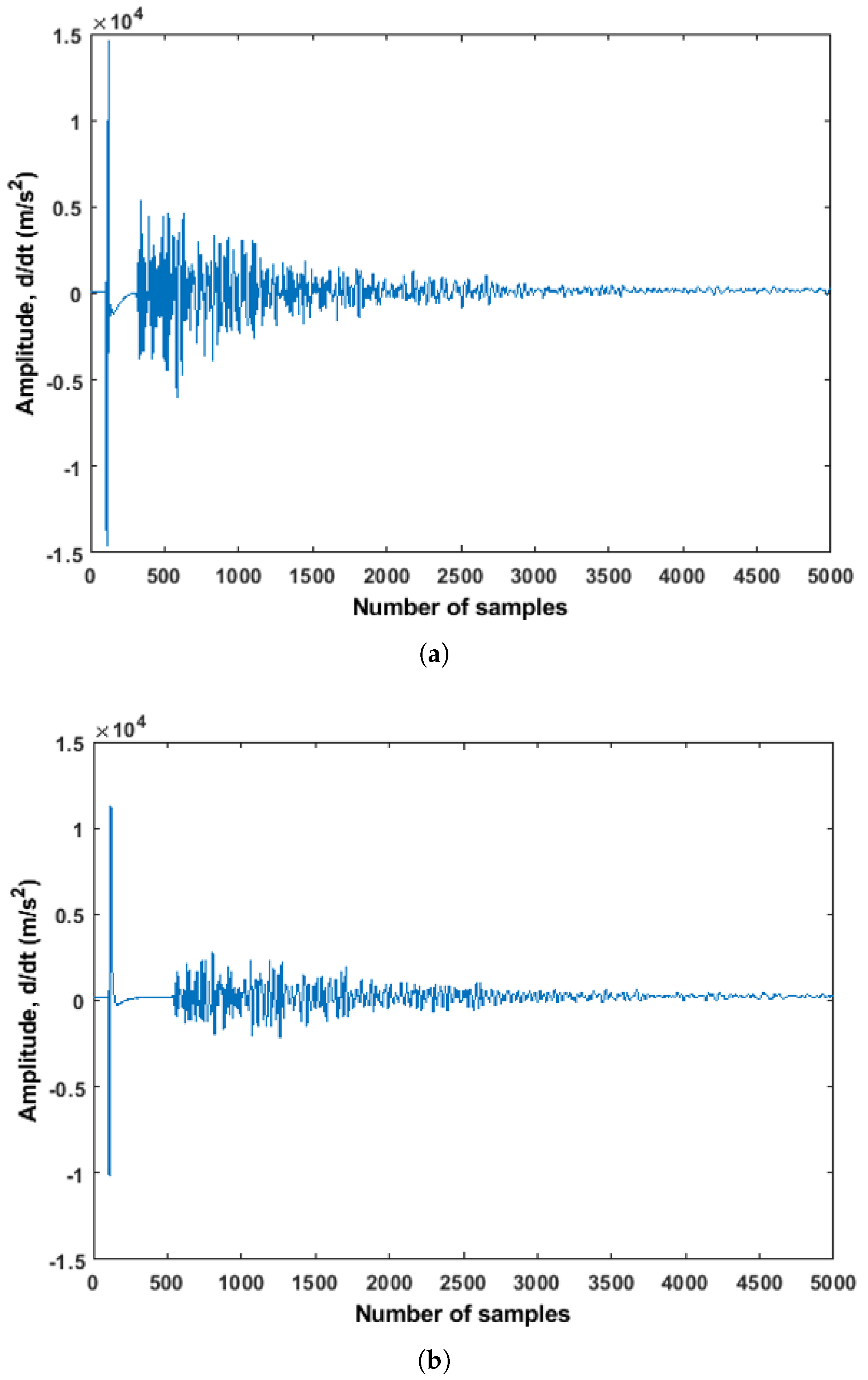
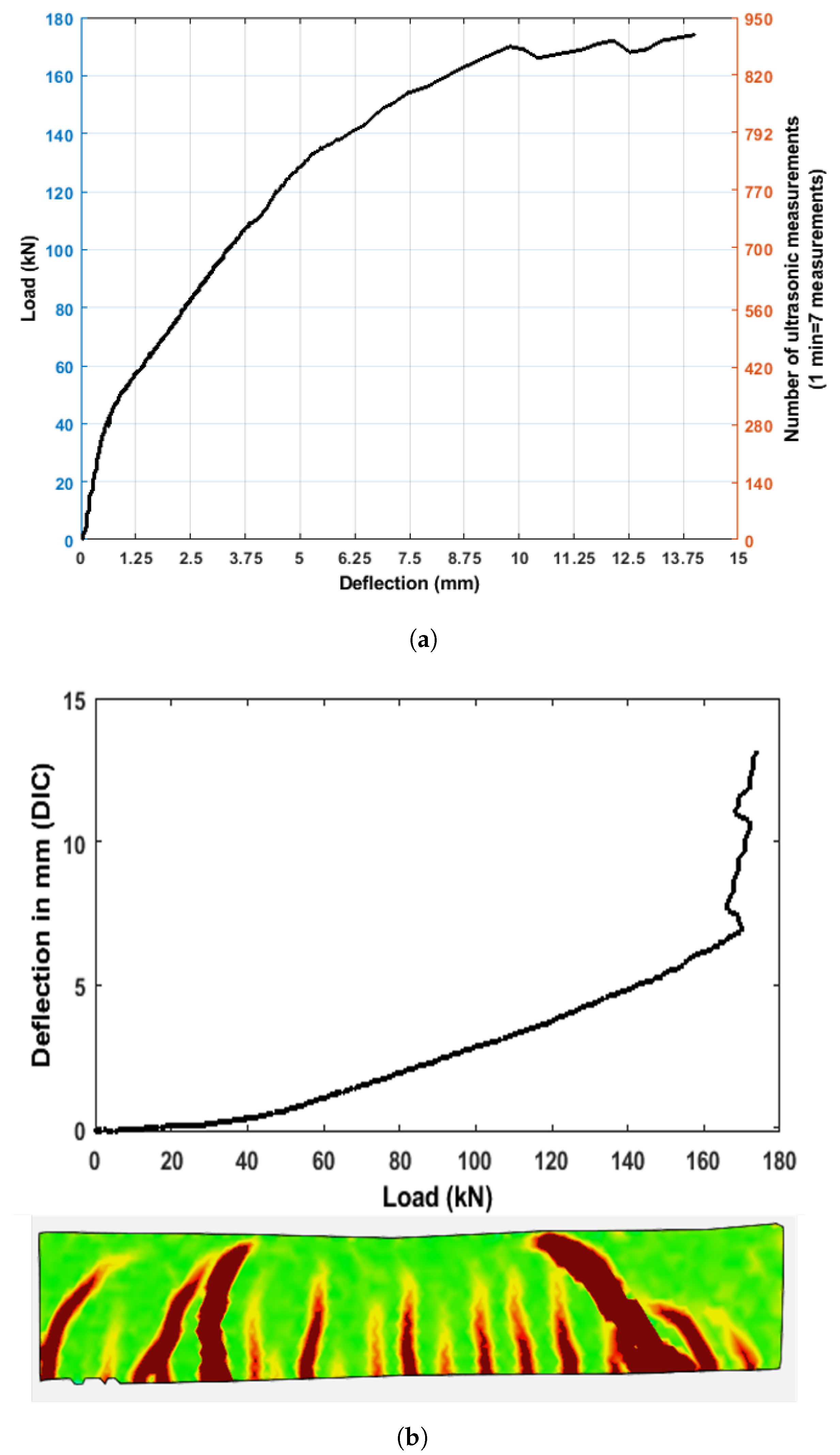
4.1. Benchmark RC Structure
4.2. Reference Real RC Structure
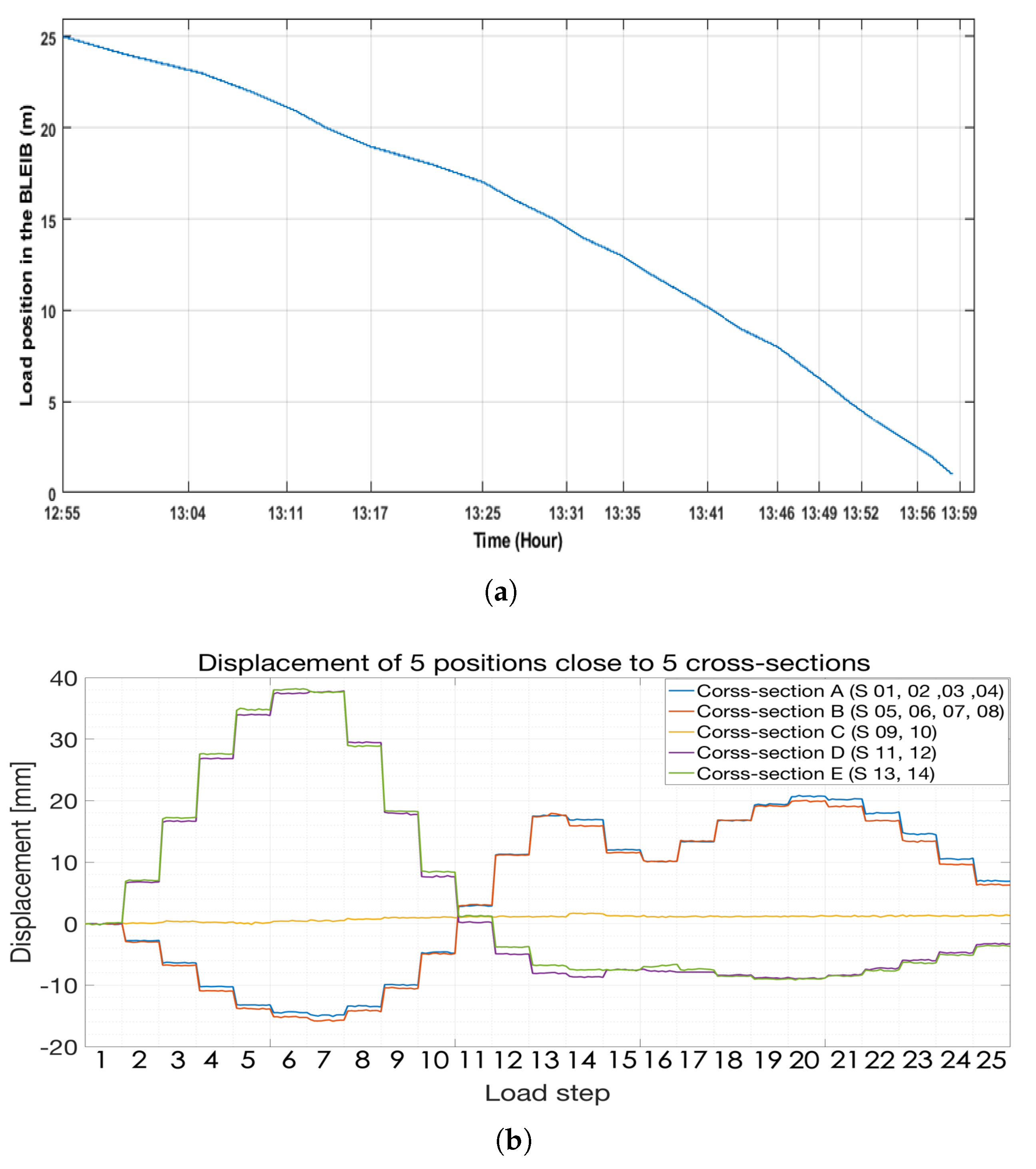
4.3. Results from Real Bridge
5. Conclusions
- The applied signal processing to extract features was verified from three different structures.
- The proposed signal processing techniques with embedded ultrasonic sensors methodology is suitable for the structural health monitoring of real civil objects.
- The optimal placement of sensors in a real structure is around 1.5 m, which will ensure the reliability of the results.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abraham, O.; Niederleithinger, E.; Chapeleau, X.; Klikowicz, P.; Brühwiler, E.; Bassil, A.; Wang, X.; Chakraborty, J.; Bayane, I.; Leduc, D.; et al. Addressing the Need to Monitor Concrete Fatigue with Nondestructive Testing: Preliminary Results of Infrastar European Project. In Proceedings of the NDE/NDT Structural Materials Technology for Highways and Bridges (SMT) and the International Symposium on Non-Destructive Testing in Civil Engineering, Columbus, OH, USA, 27 August 2018; p. 12. [Google Scholar]
- Ko, J.M.; Ni, Y.Q. Technology developments in structural health monitoring of large-scale bridges. Eng. Struct. 2005, 27, 1715–1725. [Google Scholar] [CrossRef]
- Wu, J.; Yan, Q.; Wu, X. System Identification of One Historical Bridge Using Dynamic Test Data. Arabian J. Sci. Eng. 2017, 42, 4145–4155. [Google Scholar] [CrossRef]
- Cantero, D.; González, A. Bridge Damage Detection Using Weigh-in-Motion Technology. J. Bridge Eng. 2015, 20, 04014078. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y.; Xia, L. Investigation of the Ultimate Capacity of NSM FRP-Strengthened Concrete Bridge Deck Slabs. Arab. J. Sci. Eng. 2017, 43, 1597–1615. [Google Scholar] [CrossRef]
- Scott, M.; Rezaizadeh, A.; Delahaza, A.; Santos, C.G.; Moore, M.; Graybeal, B.; Washer, G. A comparison of nondestructive evaluation methods for bridge deck assessment. NDT E Int. 2003, 36, 245–255. [Google Scholar] [CrossRef]
- Hussain, A.; Akhtar, S. Review of Non-Destructive Tests for Evaluation of Historic Masonry and Concrete Structures. Arab. J. Sci. Eng. 2017, 42, 925–940. [Google Scholar] [CrossRef]
- Hellier, C. Handbook of Nondestructive Evaluation, 2nd ed.; McGraw-Hill Education, Europe: Blue Ridge Summit, PA, USA, 2012. [Google Scholar]
- Sikorski, W. Acoustic Emission—Research and Applications; InTech: Vienna, Austria, 2013. [Google Scholar]
- Nirbhay, M.; Dixit, A.; Misra, R.K. Finite Element Modelling of Lamb Waves Propagation in 3D Plates and Brass Tubes for Damage Detection. Russ. J. Nondestruct. Test. 2017, 53, 308–329. [Google Scholar] [CrossRef]
- Aggelis, D.G.; Shiotani, T.; Momoki, S.; Hirama, A. Acoustic Emission and Ultrasound for Damage Characterization of Concrete Elements. ACI Mater. J. 2009, 106, 509–514. [Google Scholar]
- Wang, C.; Yang, S.; Li, X.; Jiang, C.; Li, M. Study on the Failure Characteristics of Concrete Specimen Under Confining Pressure. Arab. J. Sci. Eng. 2018, 44, 4119–4129. [Google Scholar] [CrossRef]
- Mutlib, N.K.; Baharom, S.; Nuawi, M.Z.; El-Shafie, A. Ultrasonic Surface Wave Monitoring for Steel Fibre-Reinforced Concrete Using Gel-Coupled Piezoceramic Sensors: A Case Study. Arab. J. Sci. Eng. 2015, 41, 1273–1281. [Google Scholar] [CrossRef]
- Rose, J.L.; Nagy, P. Ultrasonic Waves in Solid Media. J. Acoust. Soc. Am. 2000, 107, 1807–1808. [Google Scholar] [CrossRef]
- Budenkov, G.A.; Nedzvetskaya, O.V.; Shishkina, S.I.; Polyankin, G.A. Stabilization of Acoustic Coupling for Ultrasonic Testing. Russ. J. Nondestruct. Test. 2000, 36, 910–915. [Google Scholar] [CrossRef]
- Niederleithinger, E.; Wolf, J.; Mielentz, F.; Wiggenhauser, H.; Pirskawetz, S. Embedded Ultrasonic Transducers for Active and Passive Concrete Monitoring. Sensors 2015, 15, 9756–9772. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karaiskos, G.; Deraemaeker, A.; Aggelis, D.G.; Hemelrijck, D.V. Monitoring of concrete structures using the ultrasonic pulse velocity method. Smart Mater. Struct. 2015, 24, 113001. [Google Scholar] [CrossRef] [Green Version]
- Lu, Y.; Michaels, J.E. A methodology for structural health monitoring with diffuse ultrasonic waves in the presence of temperature variations. Ultrasonics 2005, 43, 717–731. [Google Scholar] [CrossRef] [PubMed]
- Cruz, A.; Vélez, W.; Thomson, P. Optimal sensor placement for modal identification of structures using genetic algorithms—A case study: The olympic stadium in Cali, Colombia. Ann. Oper. Res. 2009, 181, 769–781. [Google Scholar] [CrossRef]
- Chen, B.; Huang, Z.; Zheng, D.; Zhong, L. A hybrid method of optimal sensor placement for dynamic response monitoring of hydro-structures. Int. J. Distrib. Sens. Netw. 2017, 13. [Google Scholar] [CrossRef]
- Sun, H.; Büyüköztürk, O. Optimal sensor placement in structural health monitoring using discrete optimization. Smart Mater. Struct. 2015, 24, 125034. [Google Scholar] [CrossRef]
- Guo, H.Y.; Zhang, L.; Zhang, L.L.; Zhou, J.X. Optimal placement of sensors for structural health monitoring using improved genetic algorithms. Smart Mater. Struct. 2004, 13, 528–534. [Google Scholar] [CrossRef] [Green Version]
- Rao, A.R.M.; Lakshmi, K.; Krishnakumar, S. A Generalized Optimal Sensor Placement Technique for Structural Health Monitoring and System Identification. Procedia Eng. 2014, 86, 529–538. [Google Scholar]
- Soman, R.; Kudela, P.; Balasubramaniam, K.; Singh, S.K.; Malinowski, P. A Study of Sensor Placement Optimization Problem for Guided Wave-Based Damage Detection. Sensors 2019, 19, 1856. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marks, R.; Clarke, A.; Featherston, C.A.; Pullin, R. Optimization of acousto-ultrasonic sensor networks using genetic algorithms based on experimental and numerical data sets. Int. J. Distrib. Sens. Netw. 2017, 13, 155014771774370. [Google Scholar] [CrossRef]
- Chakraborty, J.; Katunin, A.; Klikowicz, P.; Salamak, M. Early Crack Detection of Reinforced Concrete Structure Using Embedded Sensors. Sensors 2019, 19, 3879. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, A.; Wang, L.; Bornn, L.; Farrar, C. Robust structural health monitoring under environmental and operational uncertainty with switching state-space autoregressive models. Struct. Health Monitor. 2018, 18, 435–453. [Google Scholar] [CrossRef]
- Li, M.; Ren, W.X.; Huang, T.L.; Wang, N.B. Experimental investigations on the cross-correlation function amplitude vector of the dynamic strain under varying environmental temperature for structural damage detection. J. Low Freq. Noise Vib. Active Control 2018, 39, 631–649. [Google Scholar] [CrossRef]
- Chakraborty, J.; Wang, X.; Stolinski, M. Damage Detection in Multiple RC Structures Based on Embedded Ultrasonic Sensors and Wavelet Transform. Buildings 2021, 11, 56. [Google Scholar] [CrossRef]
- Żak, G.; Wyłomańska, A.; Zimroz, R. Local damage detection method based on distribution distances applied to time-frequency map of vibration signal. In Proceedings of the 2017 IEEE 11th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Tinos, Greece, 29 August–1 September 2017; pp. 134–140. [Google Scholar]
- Willatzen, M.; Søndergaard, P.; Latino, C.; Voss, F.; Andersen, N.L.; Brokate, M.; Bounaim, A. Arrival-Time Detection and Ultrasonic Flow-Meter Applications. J. Phys. Conf. Ser. 2006, 52, 58–72. [Google Scholar] [CrossRef]
- Rojas, E.; Baltazar, A.; Loh, K.J. Damage detection using the signal entropy of an ultrasonic sensor network. Smart Mater. Struct. 2015, 24, 075008. [Google Scholar] [CrossRef]
- Kazakov, V.V. An Amplitude-Phase Method for Testing Acoustic Contact of Ultrasonic Transducer. Russ. J. Nondestruct. Test. 2019, 55, 169–172. [Google Scholar] [CrossRef]
- Bai, L.; Velichko, A.; Drinkwater, B.W. Ultrasonic defect characterisation—Use of amplitude, phase, and frequency information. J. Acoust. Soc. Am. 2018, 143, 349–360. [Google Scholar] [CrossRef] [Green Version]
- Stähler, S.C.; Sens-Schönfelder, C.; Niederleithinger, E. Monitoring stress changes in a concrete bridge with coda wave interferometry. J. Acoust. Soc. Am. 2011, 129, 1945–1952. [Google Scholar] [CrossRef] [Green Version]
- Fröjd, P.; Ulriksen, P. Frequency selection for coda wave interferometry in concrete structures. Ultrasonics 2017, 80, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Abraham, O.; Larose, E.; Planes, T.; Duff, A.L.; Lascoup, B.; Tournat, V.; Guerjouma, R.E.; Cottineau, L.M.; Durand, O.; et al. Following stress level modification of real size concrete structures with coda wave interferometry (CWI). AIP Conf. Proc. 2011, 1335, 1291–1298. [Google Scholar]
- Wang, X.; Niederleithinger, E. Coda Wave Interferometry used to detect loads and cracks in a concrete structure under field conditions. In Proceedings of the 9th European Workshop on Structural Health Monitoring Series, Manchester, UK, 10–13 July 2018; pp. 10–13. [Google Scholar]
- Chakraborty, J.; Stoliński, M.; Katunin, A. Addressing the detection capability for scalable energy consumption using primary data acquisition system of embedded ultrasonic sensors in SHM. In Proceedings of the 5th International Conference on Advances in Electrical Engineering (ICAEE), Dhaka, Bangladesh, 26–28 September 2019. [Google Scholar]
- Chakraborty, J.; Katunin, A. Detection of structural changes in concrete using embedded ultrasonic sensors based on autoregressive model. Diagnostyka 2019, 20, 103–110. [Google Scholar] [CrossRef]
- Klikowicz, P.; Salamak, M.; Poprawa, G. Structural Health Monitoring of Urban Structures. Procedia Eng. 2016, 161, 958–962. [Google Scholar] [CrossRef] [Green Version]
- Chakraborty, J.; Katunin, A.; Klikowicz, P.; Salamak, M. Embedded ultrasonic transmission sensors and signal processing techniques for structural change detection in the Gliwice bridge. Procedia Struct. Integr. 2019, 17, 387–394. [Google Scholar] [CrossRef]
- Yang, Z.; Mueller, R. Spatial-spectral cross-correlation for change detection: A case study for citrus coverage change detection. In Proceedings of the ASPRS 2007 Annual Conference, Tampa, FL, USA, 7–11 May 2007; pp. 767–777. [Google Scholar]
- Chakraborty, J.; Ottoy, G.; Goemaere, J.P.; Strycker, L.D. Modeling acoustic localization accuracy for scalable energy consumption in wireless sensor swarms. In Proceedings of the 2014 Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS), Corpus Christ, TX, USA, 20–21 November 2014. [Google Scholar]
- Tsai, D.M.; Lin, C.T. Fast normalized cross correlation for defect detection. Pattern Recognit. Lett. 2003, 24, 2625–2631. [Google Scholar] [CrossRef]
- Melhem, H.; Kim, H. Damage Detection in Concrete by Fourier and Wavelet Analyses. J. Eng. Mech. 2003, 129, 571–577. [Google Scholar] [CrossRef]
- Katunin, A. Diagnostics of Composite Structures Using Wavelets; The Publishing House of the Institute for Sustainable Technologies, National Research Institute: Gliwice, Poland, 2015. [Google Scholar]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chakraborty, J.; Wang, X.; Stolinski, M. Analysis of Sensitivity of Distance between Embedded Ultrasonic Sensors and Signal Processing on Damage Detectability in Concrete Structures. Acoustics 2022, 4, 89-110. https://doi.org/10.3390/acoustics4010007
Chakraborty J, Wang X, Stolinski M. Analysis of Sensitivity of Distance between Embedded Ultrasonic Sensors and Signal Processing on Damage Detectability in Concrete Structures. Acoustics. 2022; 4(1):89-110. https://doi.org/10.3390/acoustics4010007
Chicago/Turabian StyleChakraborty, Joyraj, Xin Wang, and Marek Stolinski. 2022. "Analysis of Sensitivity of Distance between Embedded Ultrasonic Sensors and Signal Processing on Damage Detectability in Concrete Structures" Acoustics 4, no. 1: 89-110. https://doi.org/10.3390/acoustics4010007
APA StyleChakraborty, J., Wang, X., & Stolinski, M. (2022). Analysis of Sensitivity of Distance between Embedded Ultrasonic Sensors and Signal Processing on Damage Detectability in Concrete Structures. Acoustics, 4(1), 89-110. https://doi.org/10.3390/acoustics4010007