Guided Lamb waves are multimodal, i.e., the number of modes being excited depends on the excitation frequency. For most practical purposes, only the first symmetric (S
0) and anti-symmetric (A
0) wave modes are used. These fundamental wave modes are independent of each other and propagate at different velocities. Due to different propagation velocities of the A
0 and S
0 waves, the time between the arrivals of the A
0 and S
0 wave modes gets larger with increasing propagation distance. A sufficient distance between the source and the sensor may completely separate these waveforms, in which case the starting and ending instants of each mode can be detected. In this situation, where the wave modes are separated, several methods are found in the literature for finding the Time of Arrival (ToA), such as: the Akaike Information Criterion (AIC) [
34,
35], the threshold and rising edge of the envelope slope [
36]. Bai et al. offered a comparative analysis between the aforementioned techniques and time correlation, Continuous-time Wavelet Transform (CWT) correlation and CWT binary map for wave mode identification [
37].
3.1. Hilbert Transform Calculation for Phase and Instantaneous Frequency Analysis
The Hilbert Transform (
HT) is used for the calculation of the analytic signal
xa(
t) of a given real signal
xr(
t). The result is a complex signal whose real part coincides with the original signal [
38], while the imaginary part is its
HT, provided in Equation (1) as:
where
j is the imaginary unit, and
H[
xr(
t)] is the
HT of
xr(
t).
The imaginary part in Equation (1) is such that the frequency spectrum of the analytic signal has zero amplitude in the negative frequency range. In the positive frequency range, the spectrum of the analytic signal coincides with the spectrum of the real signal, with twice the energy to compensate for the loss of spectral energy from the negative frequencies. In order to accomplish this definition, the imaginary part
xHT(
t) is a ±90° shifted version of the real signal. The shift is positive for negative frequencies and vice-versa. In the frequency domain, with angular frequency
ω, this shift is equivalent to multiplying by ±
j, imaginary unit, and therefore, the imaginary part of the analytic signal can be obtained from the original signal in the frequency domain
Xr(
ω) as described by Equation (2).
where
Xr(
ω) is the FFT of
xr(
t). With the definition of the
HT in the frequency domain provided in Equation (2), the analytic signal results in Equation (3).
The analytic signal
xa(
t) so described may be generated based on the Fast Fourier Transform (FFT). This method has also the advantage of generating
xa(
t) and
xHT(
t) at the same time. As followed in Equation (4), after the FFT of
xr(
t) is performed, the amplitudes of the negative frequency components are set to 0, and the amplitudes of the positive frequencies are multiplied by 2, obtaining
Xa(
ω). Finally, the inverse FFT is applied to the resulting function in order to get the analytic signal back in the time domain.
The magnitude of this signal
xa(
t) is the envelope of the original real signal, while the argument corresponds to its phase, as provided in Equation (5).
The phase of a signal or wave packet with a dominant or central frequency
fc, increases linearly with time, at a rate that is proportional to this frequency. In other words, the variation of the phase of a signal with respect to time approximates its instantaneous circular frequency
ωinst(t), calculated from the phase of its analytic signal as:
where
finst is the instantaneous frequency.
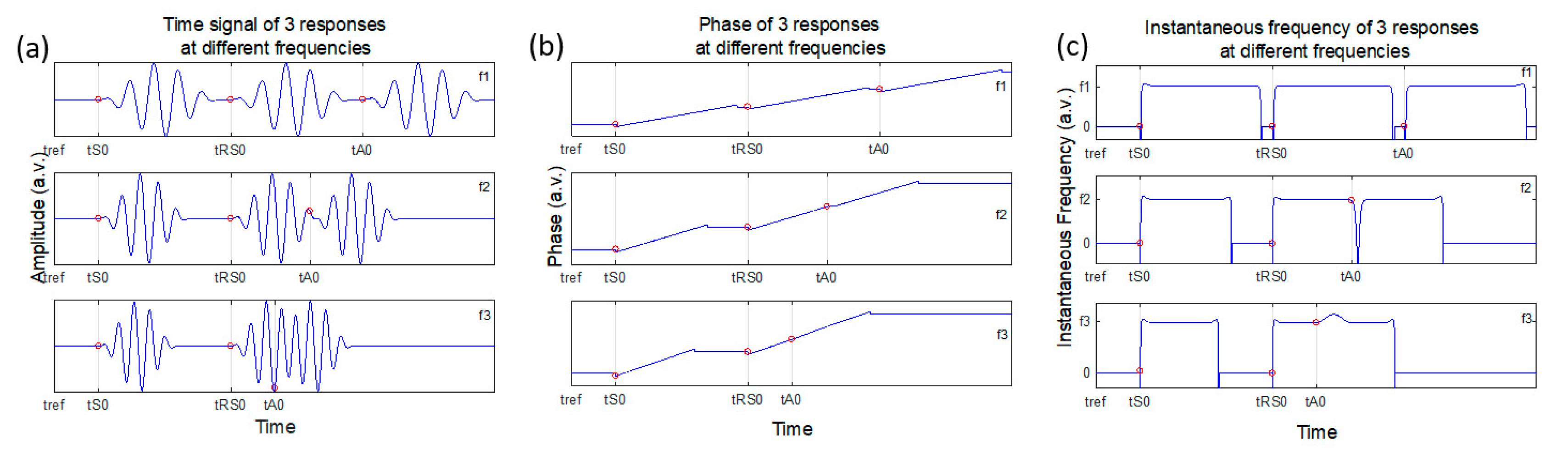
As an example of the application of these calculations,
Figure 4 shows a numerical example of the arrival of mode S
0 (
tS
0), its reflections from the boundaries (
tRS
0), and mode A
0 (
tA
0), at three different arbitrary frequencies
f1–
f3.
In
Figure 4a, the three waves overlap at a specific instant, depending on their frequencies and the travelling distance. This overlapping makes it challenging to determine the instant of time when the second or third waveform starts due to constructive and destructive effects of wave overlapping. In this situation, the methods based on signal analyzed in time domain or envelope slope are not enough for the determination of the arrival time of each of these waves.
The phase analysis of the signal obtained from the Hilbert Transform (
HT) is proposed for modes separation and later identification in this paper. The start of a wave packet interfering with noise and/or a different wave packet is characterized by a variation on the evolution of the phase of the signal, and the corresponding frequency change, as shown in
Figure 4b,c respectively. These changes are also present at the end of the wave packet, which is an indication of its duration. In the case of Lamb waves, both S
0 and A
0 modes can be identified by their respective phase changes.
It is not possible to experimentally excite a signal at a single frequency. Hence a bandwidth around the central or dominant frequency will always be present. The first consequence is that the instantaneous frequency of a wave packet cannot be a single value, contrary to what is shown in
Figure 4c. As such, a small variation around the dominant frequency is expected.
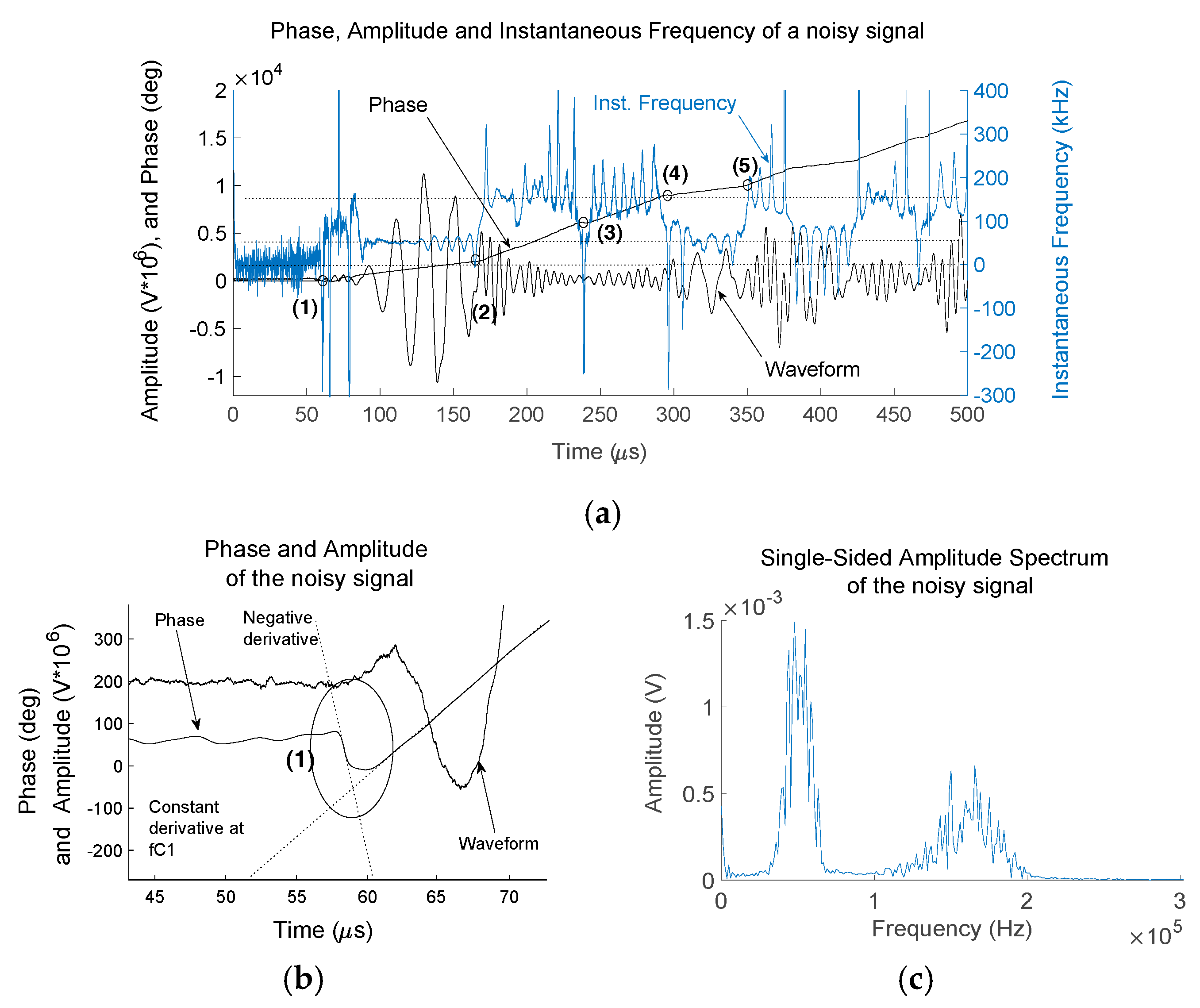
When two waveforms of different central frequency are overlapped, the resulting instantaneous frequency is a value between the frequencies of the overlapping waves. Hence, the instant when a waveform of central frequency f
C2 is overlapped with a waveform of central frequency f
C1 can be detected by an instant change in the slope of the phase, and the corresponding change in the
finst(
t), as depicted in
Figure 5.
Figure 5a shows an example of the amplitude, phase and instantaneous frequency of an experimentally obtained waveform. The waveform has two different central frequencies at 50 kHz and 150 kHz respectively, as indicated by the FFT of the signal in
Figure 5c. Referring to
Figure 5a, instant (1) is the arrival of the first wave packet at central frequency 50 kHz, indicated by the sudden change in the phase slope, where the constant derivative of the slope suddenly changes. This instant is highlighted within an ellipse in
Figure 5b, the magnified view of instant (1). This sudden variation on the phase of the signal generates a significant variation of its derivative with time, or instantaneous frequency as it is defined by Equation (6). This derivative may take positive or negative values. Instant (1) is an example of a negative derivative, followed by the constant phase variation at frequency 50 kHz. Instant (2) corresponds to the arrival of a wave at frequency 150 kHz, interfering with the end of the wave at 50 kHz. Instant (3) is the arrival of a second wave at 150 kHz, interfering with the previous one. Instants (4) and (5) are examples of the interference of wave packets at 50 and 150 kHz, indicated by the different slopes of the phase plot. Higher slopes correspond to higher frequencies, or faster variation of phase with time.
In the case of a broadband signal, there are multiple frequencies contributing to a varying instantaneous frequency. This variation in the instantaneous frequency is no longer constant, as it would for a central frequency signal, and yet it results in a clear phase slope variation at the arrival of the very first wave packet, the S0 mode. However, the overlapping of the different frequency components, together with the interference of the multiple reflections from the complex geometry of the structure, complicates the separation of the individual wave packets, and therefore the clear identification of mode A0. As such, phase analysis by Hilbert Transform (HT) is then combined with dispersion curves and geometry considerations, for wave mode identification.
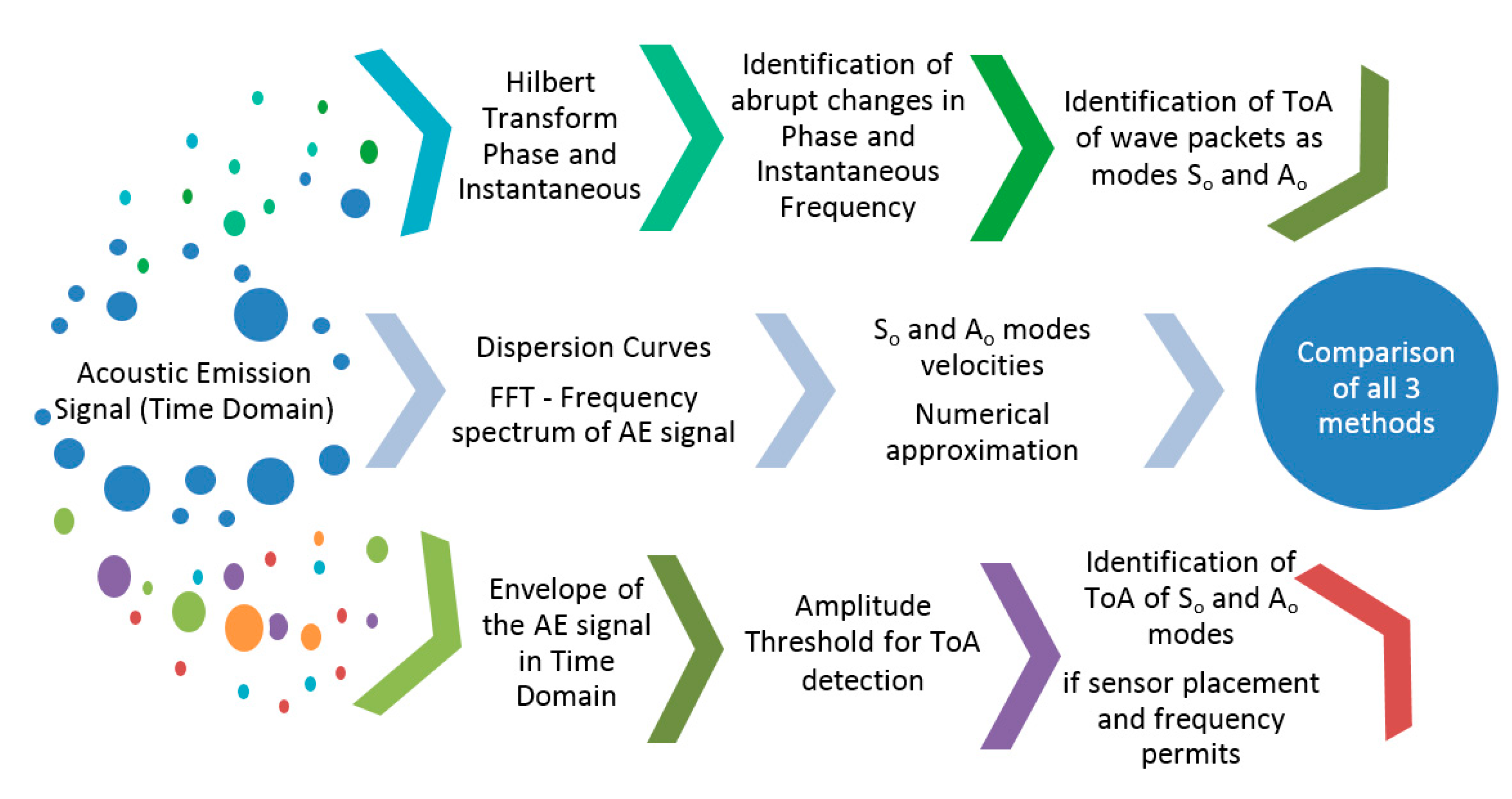
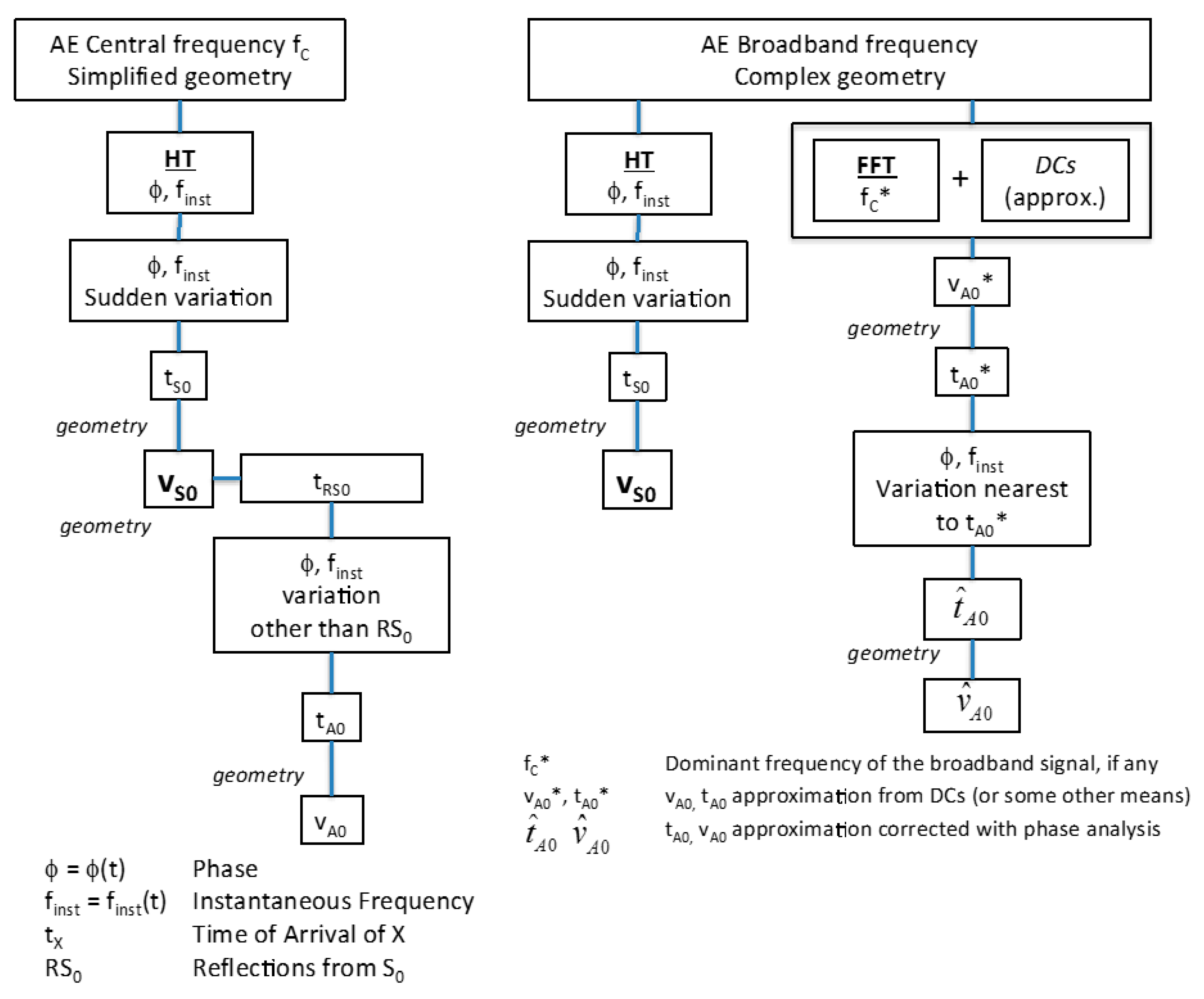
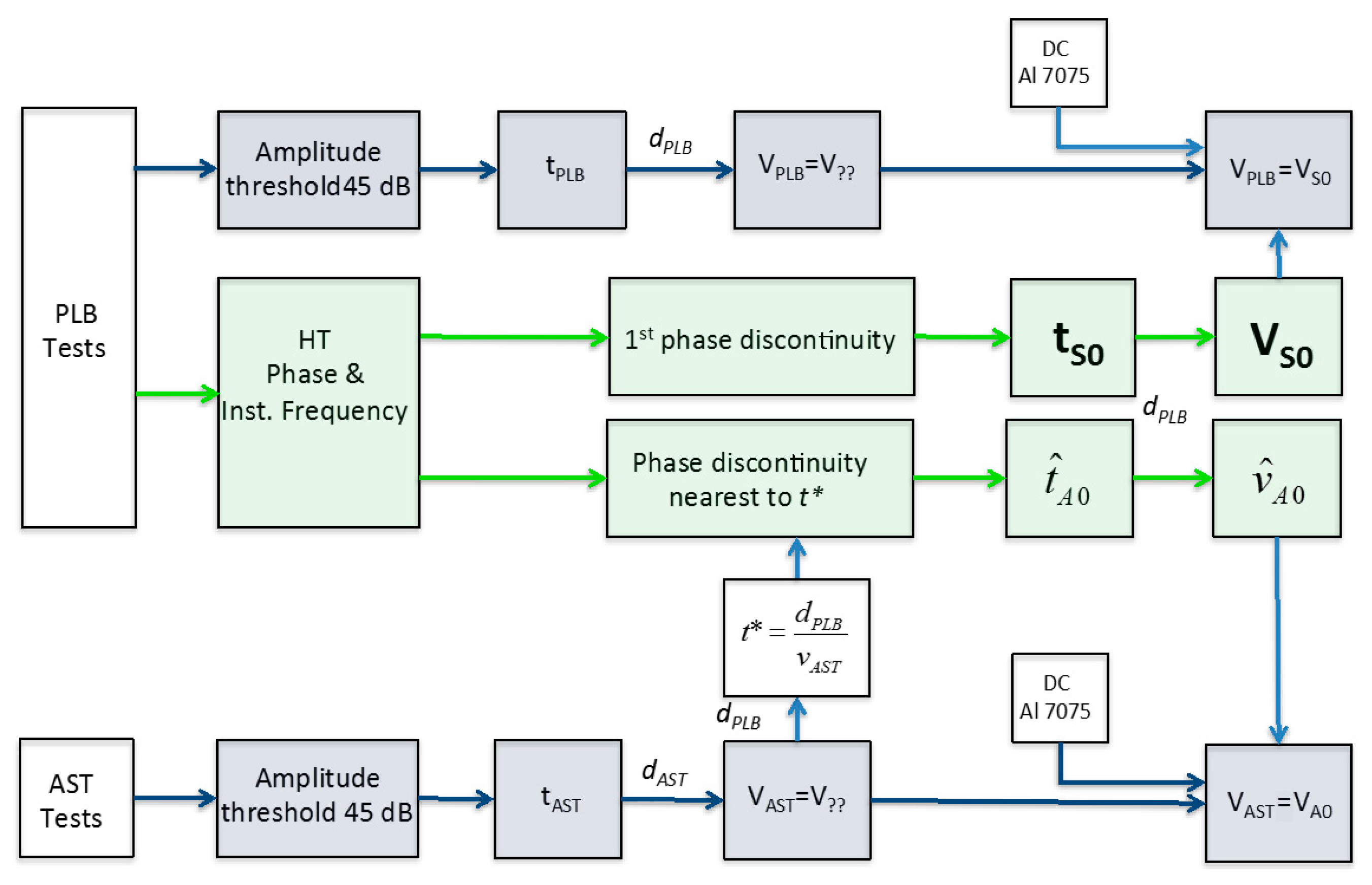
The process followed for the mode identification using phase analysis, either for central frequency content or broadband signals, in simple or complex structures is summarized in
Figure 6. The
HT of the AE provides the phase of the signal, and its instantaneous frequency calculated as the variation of phase with time. The arrival of the first wave packet is identified by the first sudden change in the slope of the phase, and the corresponding instantaneous frequency peak. In the propagation of Lamb waves, mode S
0 is the fastest mode and therefore this first change in phase indicates the ToA of mode S
0. Knowing the distance between the AE source and the sensor provides the wave velocity of mode S
0.
For simple geometries, like flat plates, the distances between AE and sensor are easy to determine. If the geometry is complex, the most direct propagation path needs to consider the different structural parts. The velocity of mode S0 calculated in this manner is an average velocity for this propagation path.
The consecutive changes in phase are due to mode A0 and the reflections of both S0 and A0 with the geometric boundaries. The ToA of the reflections of mode S0 are estimated from the velocity of propagation of this mode already obtained and geometry considerations, that is the distances of the reflecting elements (edges, stiffeners, etc.) to the sensor. Then the corresponding S0 and RS0 changes of phase (and instantaneous frequency) are discriminated and excluded for the identification of ToA of mode A0.
This procedure for modes identification can be quite straightforward for narrow band frequency signals, and simple geometries, in which case distances to boundaries and directions of propagation have a relatively simple determination. However, it gets complicated when applied to complex geometries and broadband signals. The ToA of the AE reaching a particular sensor is accurately determined by the sudden change in phase upon arrival, as described in
Section 3.1. This is the time for mode S
0 to propagate following the direct propagation path between source and sensor. This velocity that is accurately determined, is then assumed as an average of the velocity for this path and its surrounding area, where the possible closest reflections can be generated and arrive at the sensor before the arrival of mode A
0. This velocity is then used in the calculation of the ToA of the closest possible reflections susceptible to interfere with A
0. Once these ToA are calculated, their corresponding phase and instantaneous frequency events are discarded for the consideration of ToA of A
0. An approximation of the Dispersion Curves (DCs) and a pre-analysis of the frequency content of the AE, such as the frequency spectrum from the FFT of the signal, provide a first approximation of the velocity of mode A
0, named v
A0*, and from this an approximation of its ToA, t
A0*. Then the nearest phase change instant, after discarding the S
0 reflections, is picked as a correction of this approximate ToA. In the present analysis the AST test results served as such additional means of validation.
In some occasions the phase changes are not easily detected at a first glance. That is the main reason for the combination of phase and instantaneous frequency within the same analysis. There are small fluctuations in phase, some of them due to noise, some due to the frequency dependency of the Hilbert Transform. A still small variation in phase, but in this case due to the interference of 2 waves, can be more prominent and easier to detect from its 1st derivative, which is the instantaneous frequency. Once the instantaneous frequency marks this instant as an event of interest, a closer observation of the phase evolution shows a change more pronounced than expected as the phase variation for a single wave packet.
3.2. Wave Calibration between Automatic Sensor Test (AST), Pencil Lead Break (PLB) and Phase Analysis
The assumption of using the standard wave speeds commonly found in the literature for specific material would result in incorrect location of the emissions captured by the Acoustic Emission (AE) system, especially in complex multi-material structures. As part of implementing AE on any structure, it is standard to perform Pencil Lead Break (PLB) and Automatic Sensor Test (AST) prior to acquiring data from that structure. An AE operator will perform a calibration by identifying the location of the AST and/or PLB with respect to the sensor placement. This study makes use of these two types of signals while following the method described in the previous section in order to identify the corresponding wave modes. AST, PLB, or cracks emanating in a thin plate-like structure contain several Lamb waves modes excited at wide range of frequencies. For most practical purposes, the frequency range is below the first cut-off frequency, where only the fundamental symmetric (S0) and anti-symmetric (A0) Lamb modes are considered.
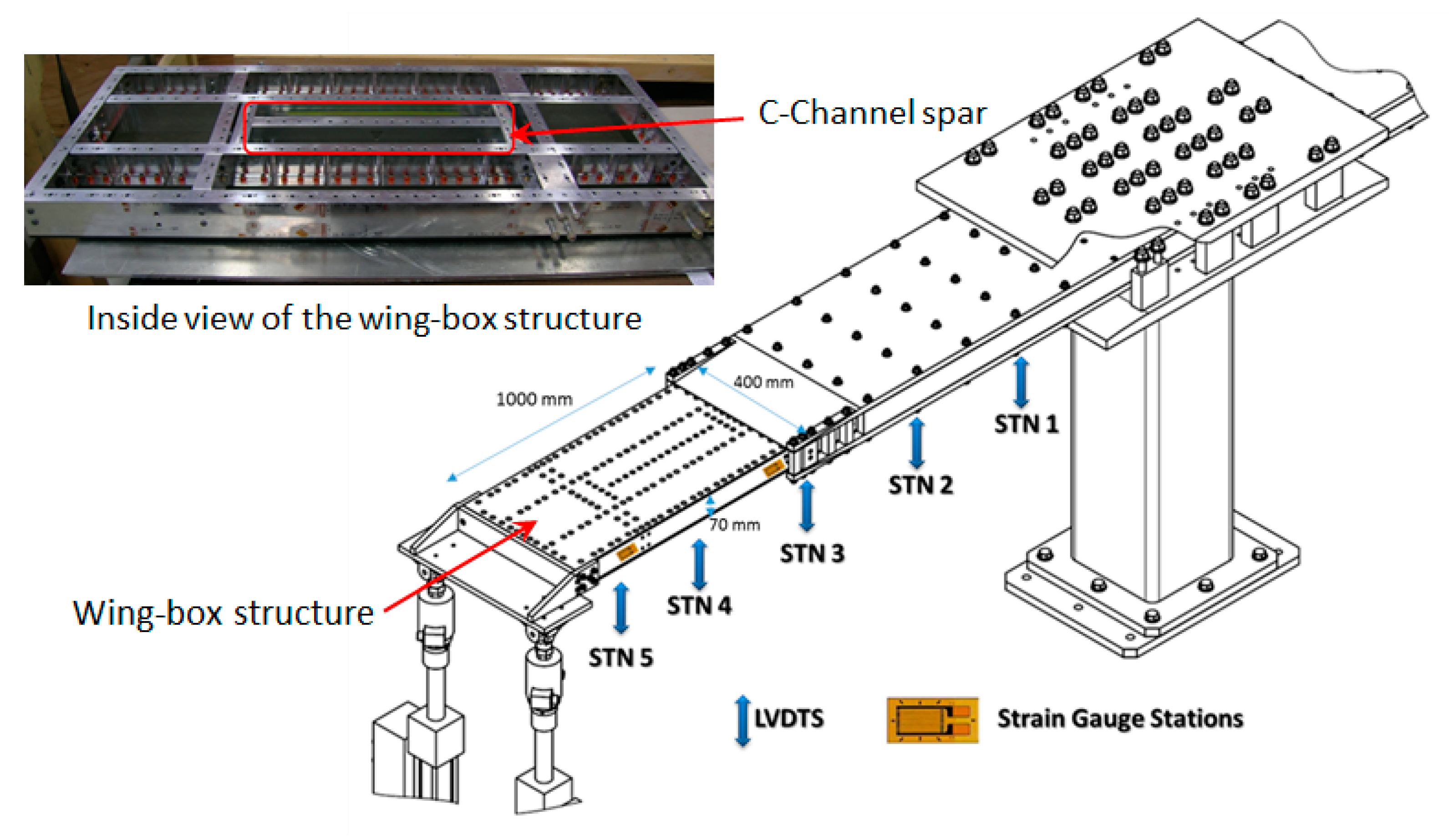
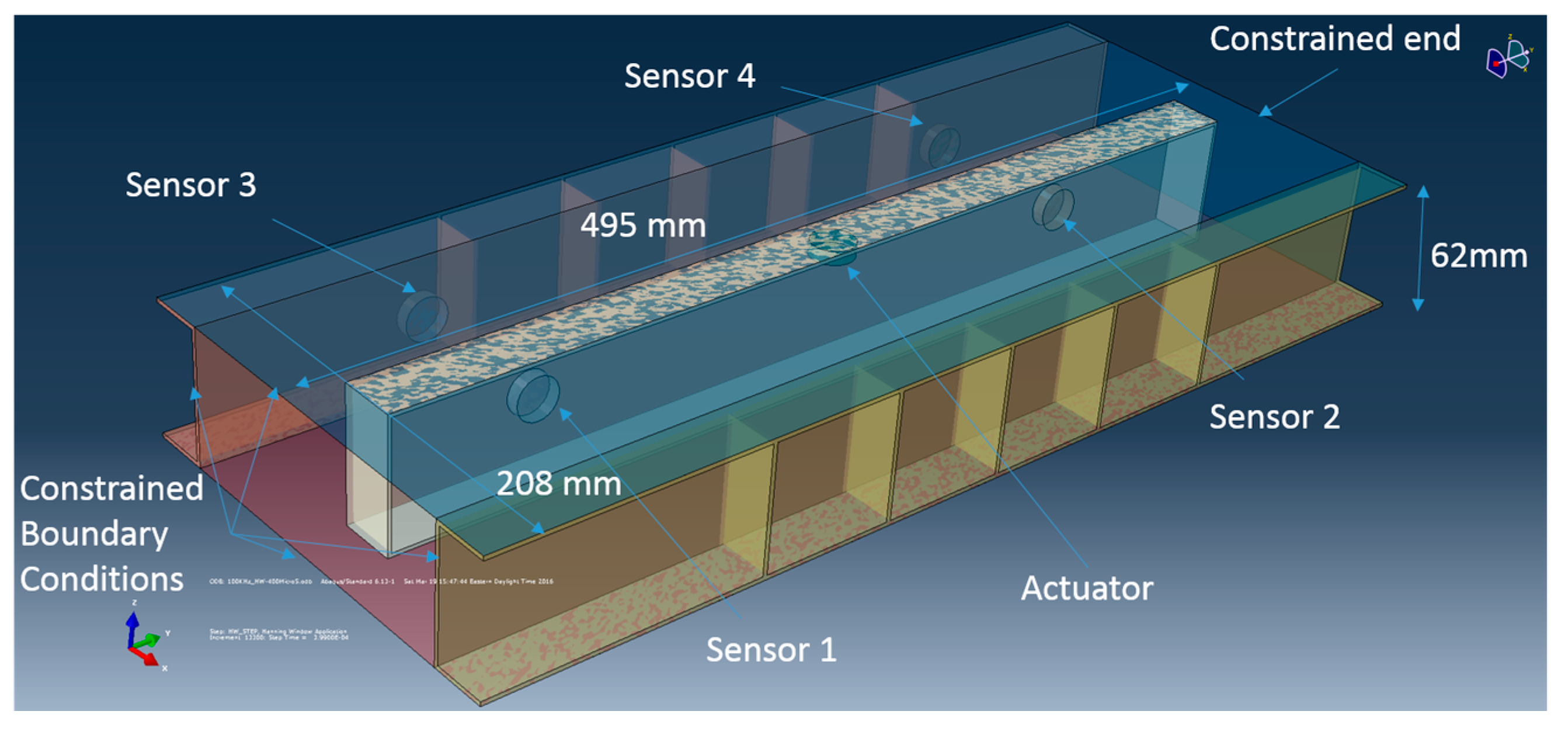
The AST within the Physical Acoustic system [
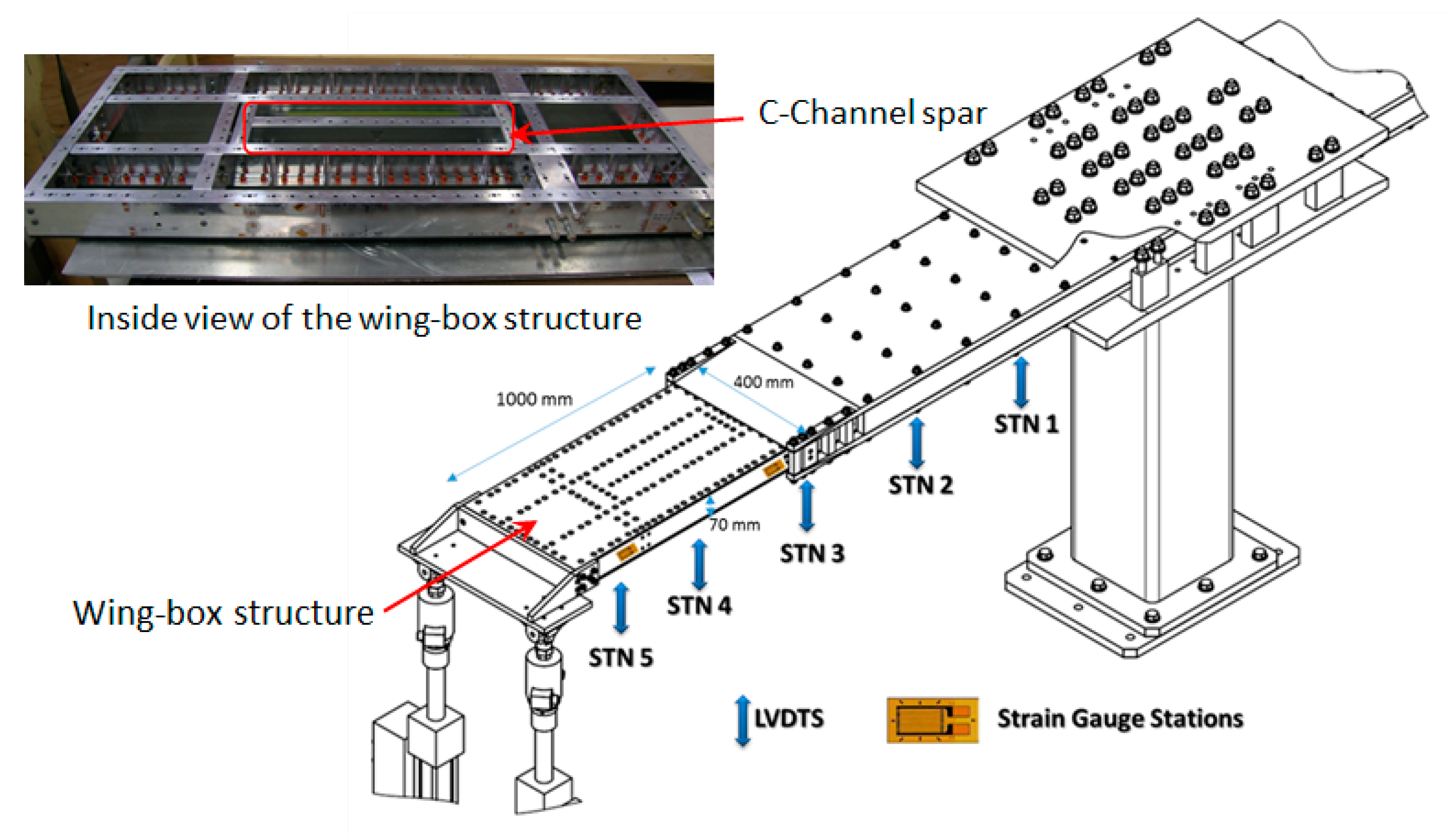
39] consists of an acoustic pulse sent from a known actuation location, receiving the response to this actuation at another known location, which allows for the determination of the propagating average speed in the structure along its path. Two different paths (Sensors 1–4) were evaluated in both directions of propagation, obtaining the Time of Arrival (ToA) by setting the detection amplitude threshold at 45 dB. The average ToA was obtained from the responses to 50 AST pulses.
PLB on the other hand, consists of the reception of eight PLB events at two pairs of sensors, named Location Group 1 and Location Group 2 shown in
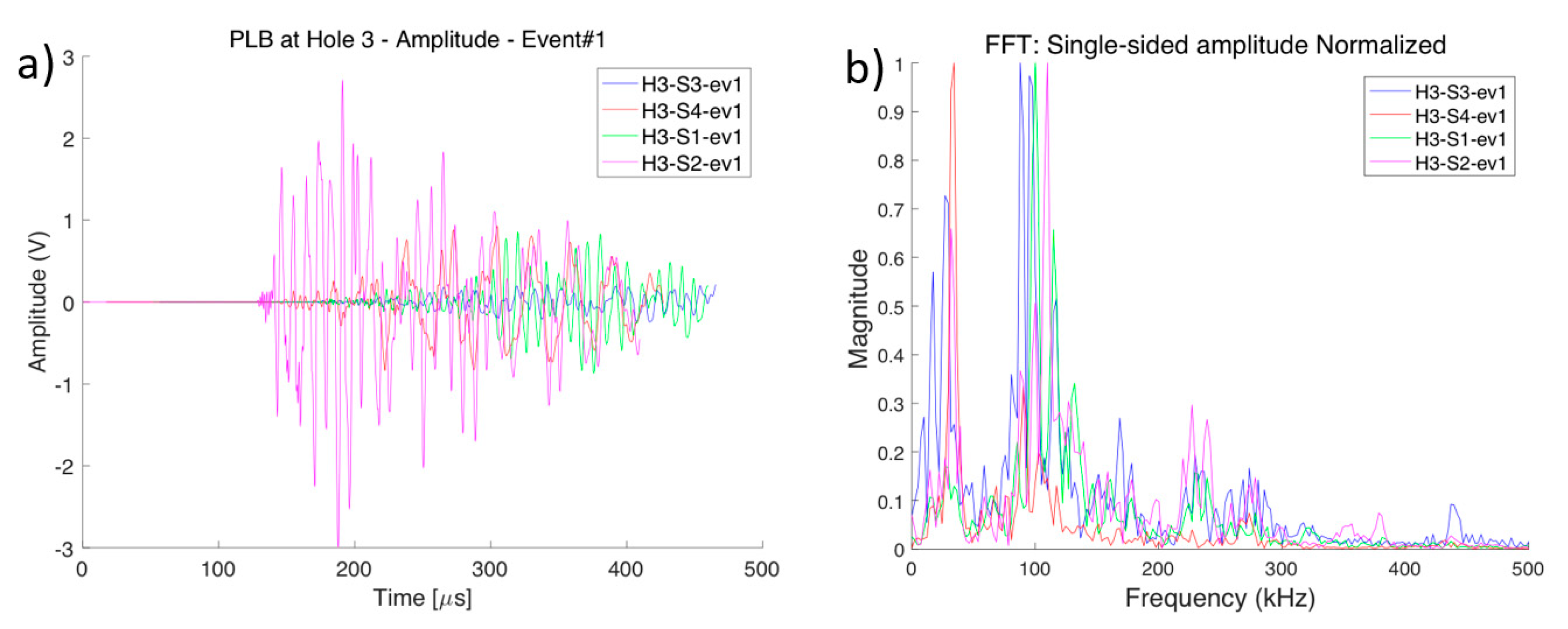
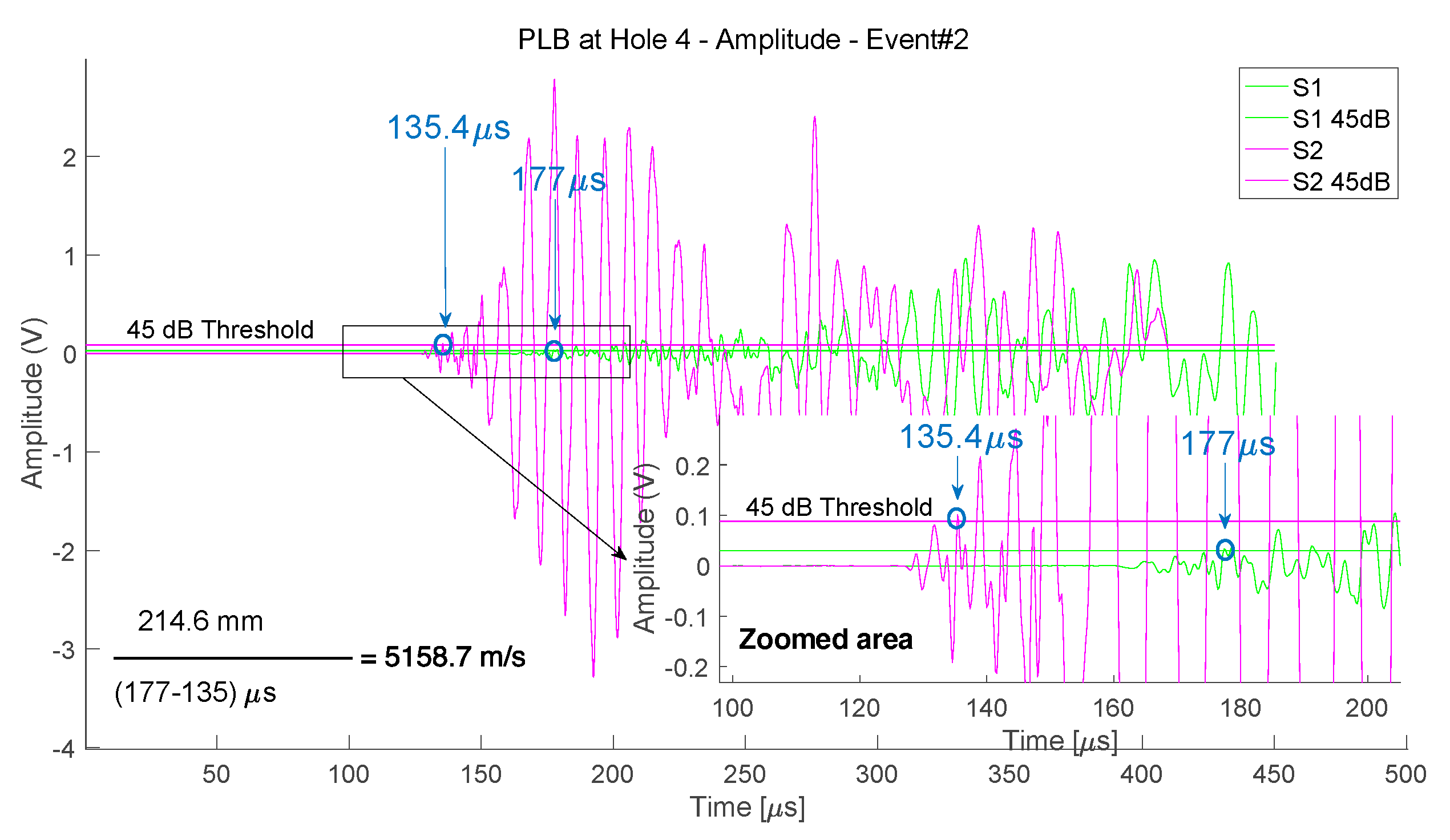
Figure 2. Four of the PLB events were performed at Hole 3 location, and the other four events at Hole 4. The ToA were obtained with an amplitude threshold of 45 dB and an average of four events at each PLB location.
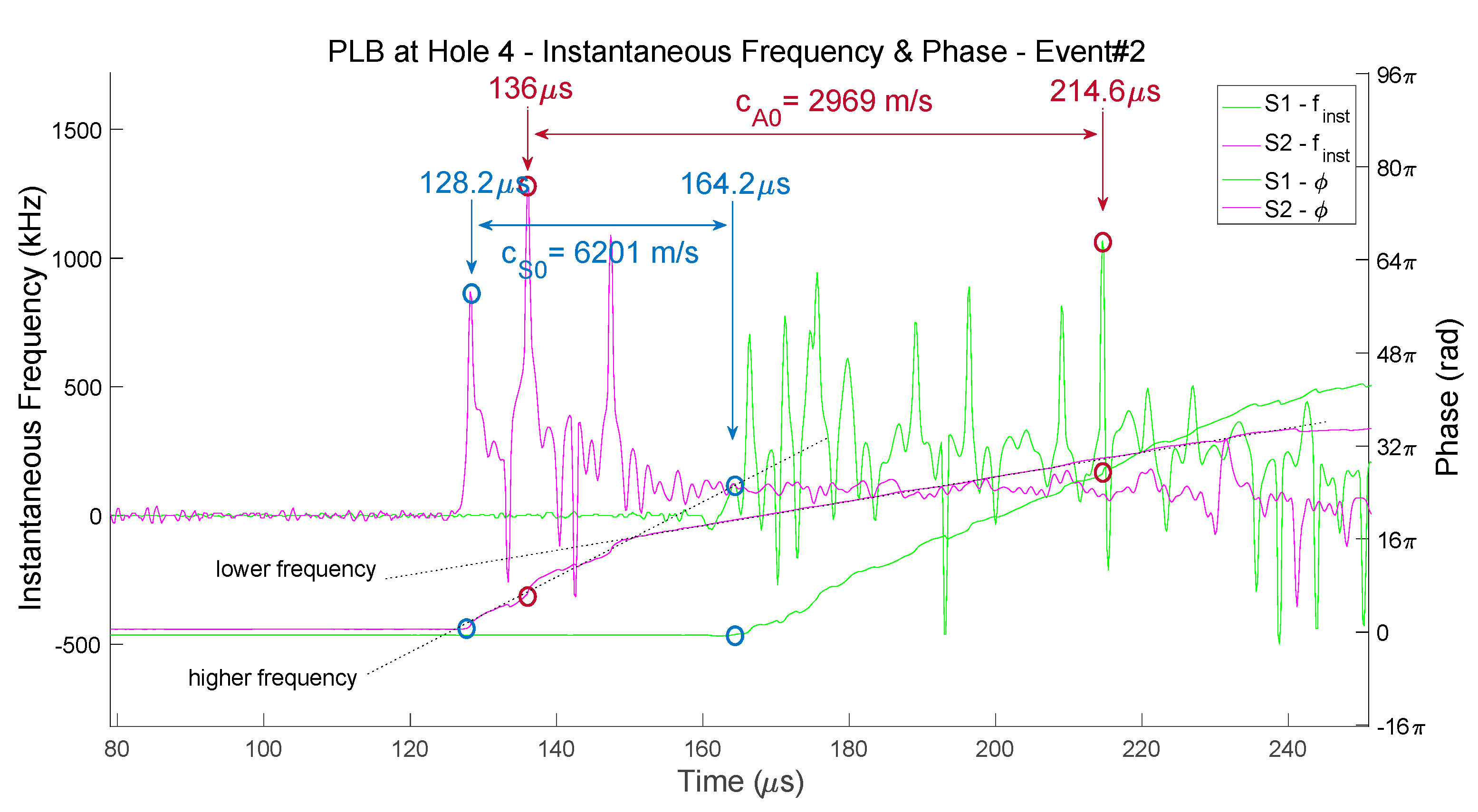
The experimental results from the PLB were additionally analyzed in phase domain through the HT operator. The ToA of mode S0 was accurately calculated, while mode A0 was interfering with the multiple reflections corresponding to the complex geometry, and the high dispersion due to the broadband frequency. Therefore, the amplitude threshold results from AST and PLB were used as a first approximation for the identification of the phase variations due to the A0 wave arrival.
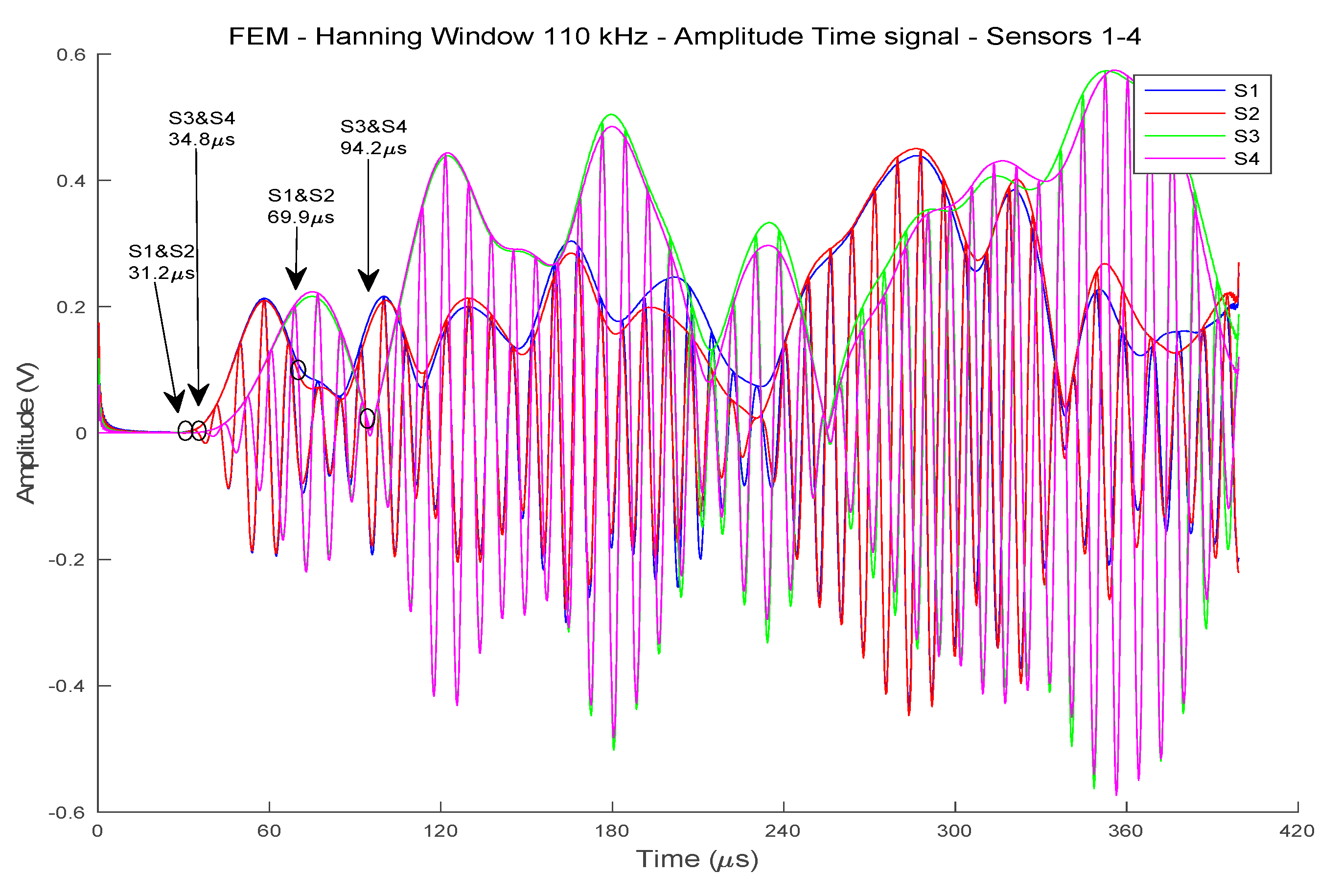
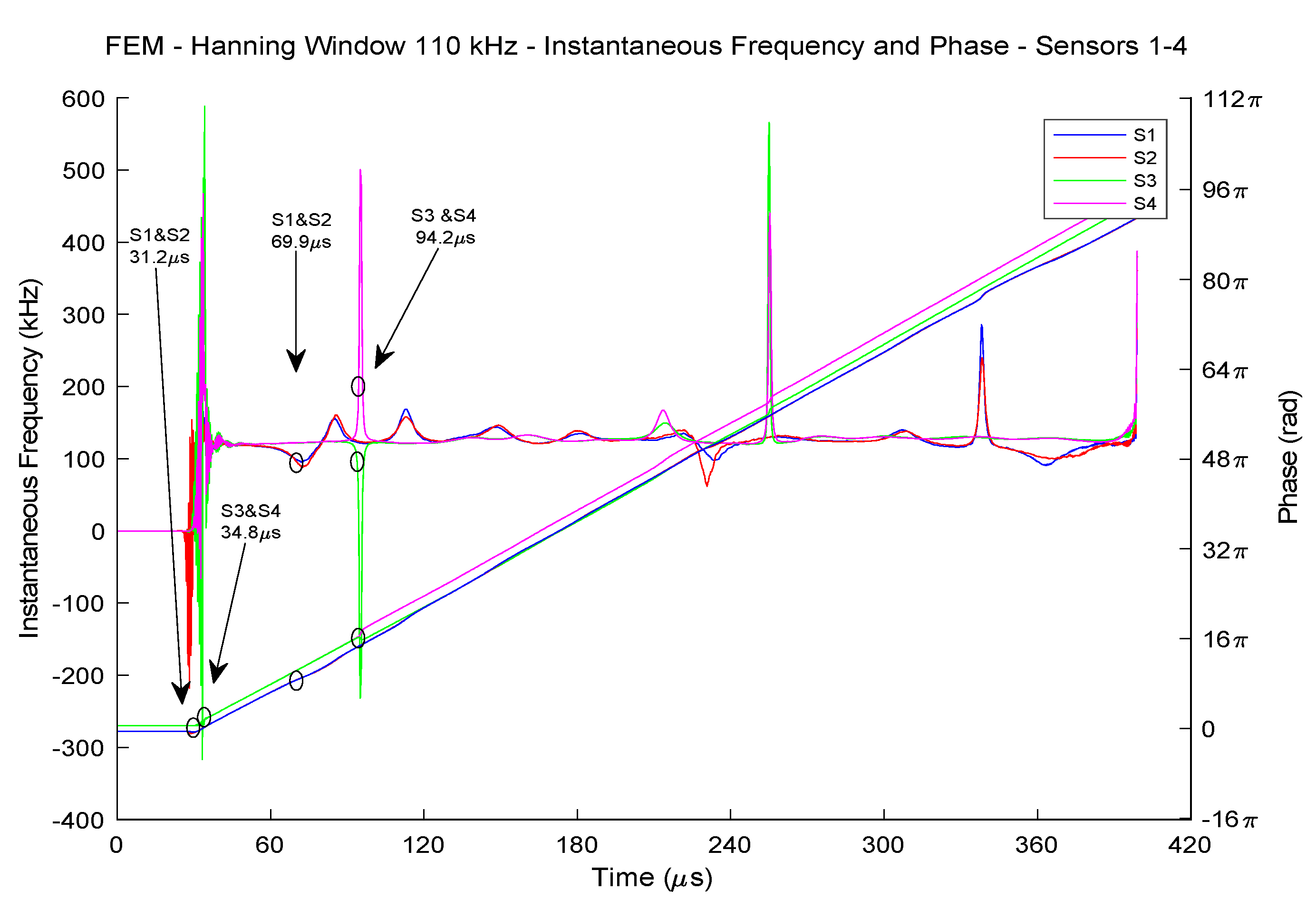
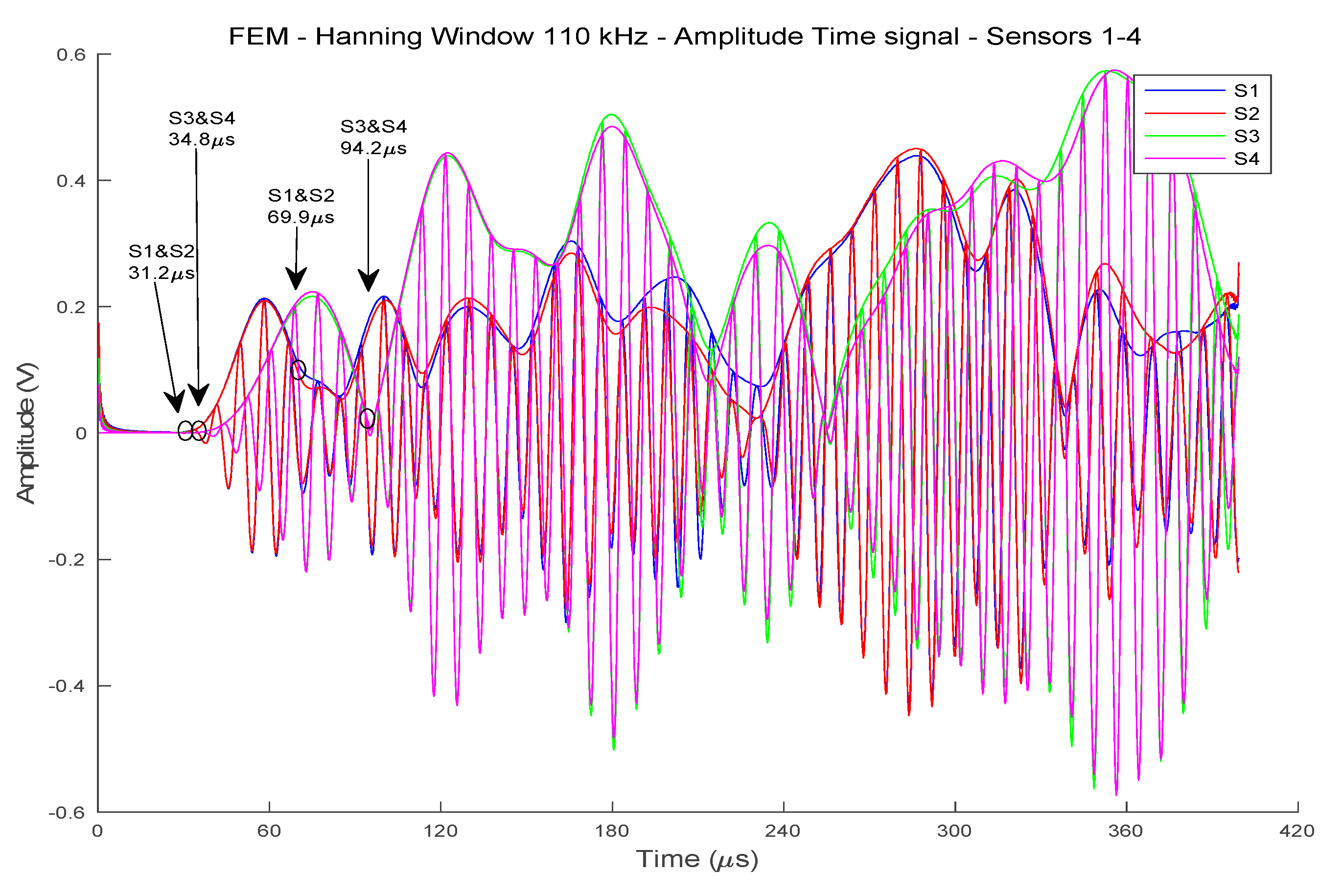
Despite the broadband range of frequencies, the Fast Fourier Transform (FFT) of the PLB signals revealed the existence of a predominant frequency. This frequency was then used as central frequency of the excitation signal in the Finite Element Model (FEM) developed for the analysis of the waves propagation in this complex structure.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}