
Development of a Portable Device for Surface Traction Characterization at the Shoe–Floor Interface



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
3. Results
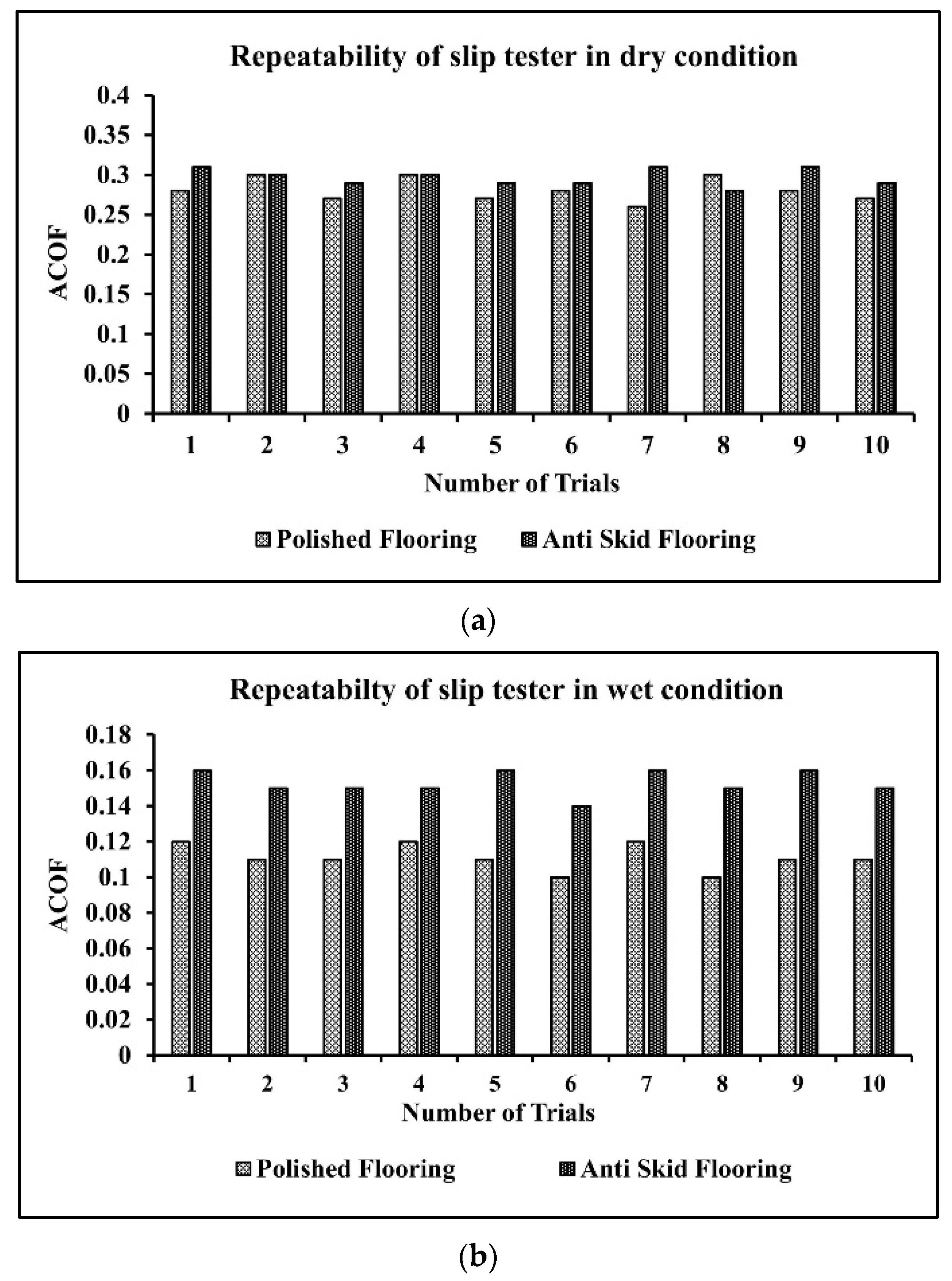
3.1. Evaluation of Biofidelity and Repeatability of Slip Tester
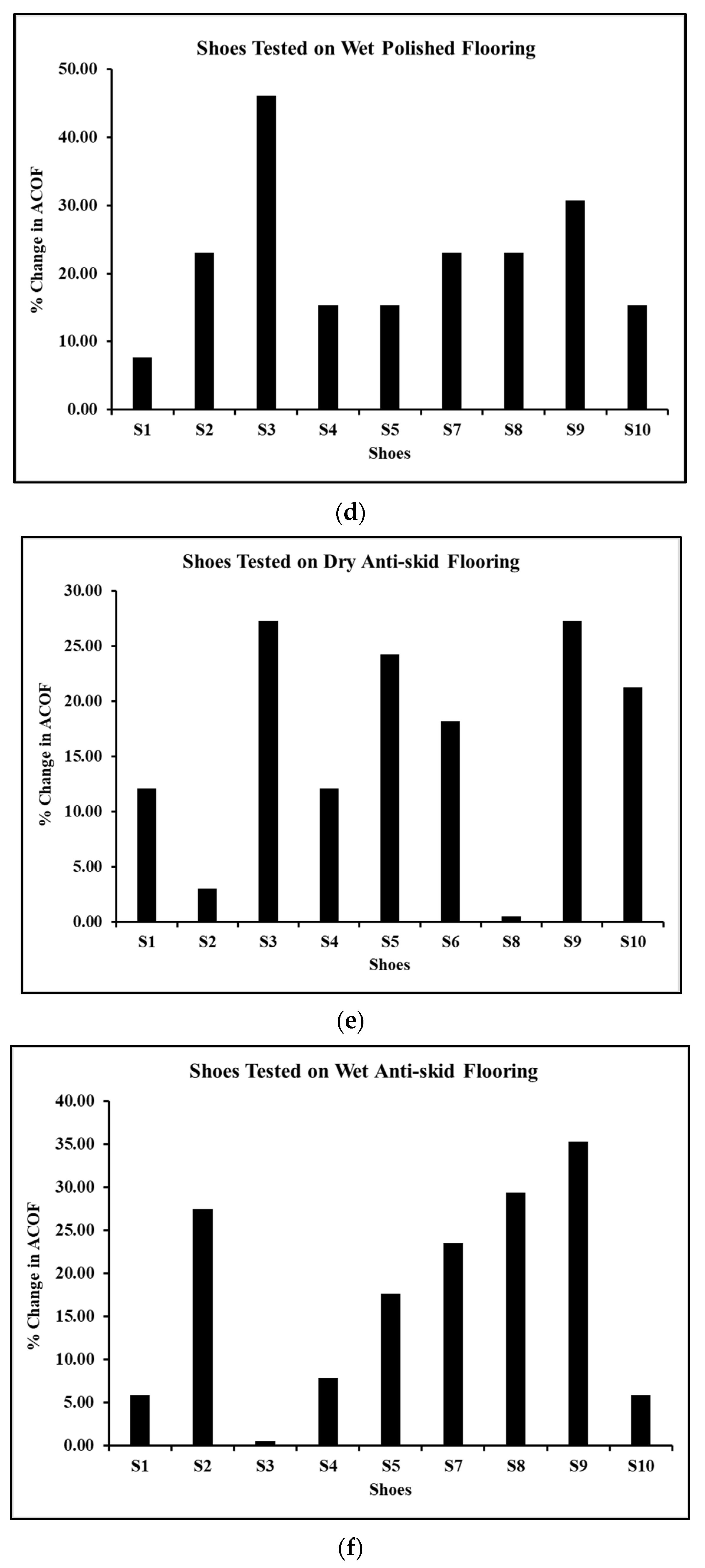
3.2. Ability of Slip Tester to Differentiate Shoes Tested on Similar Slippery Conditions
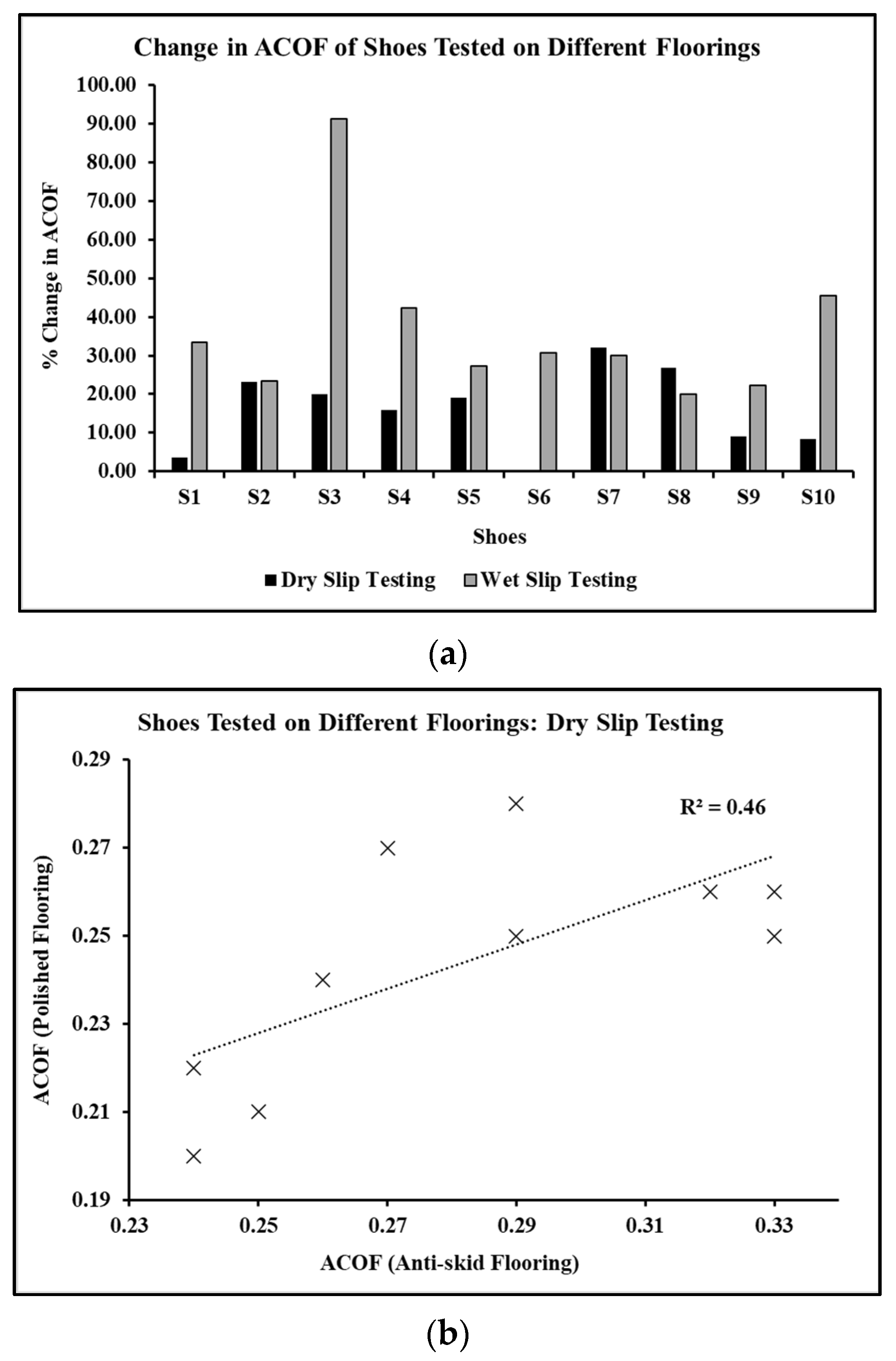
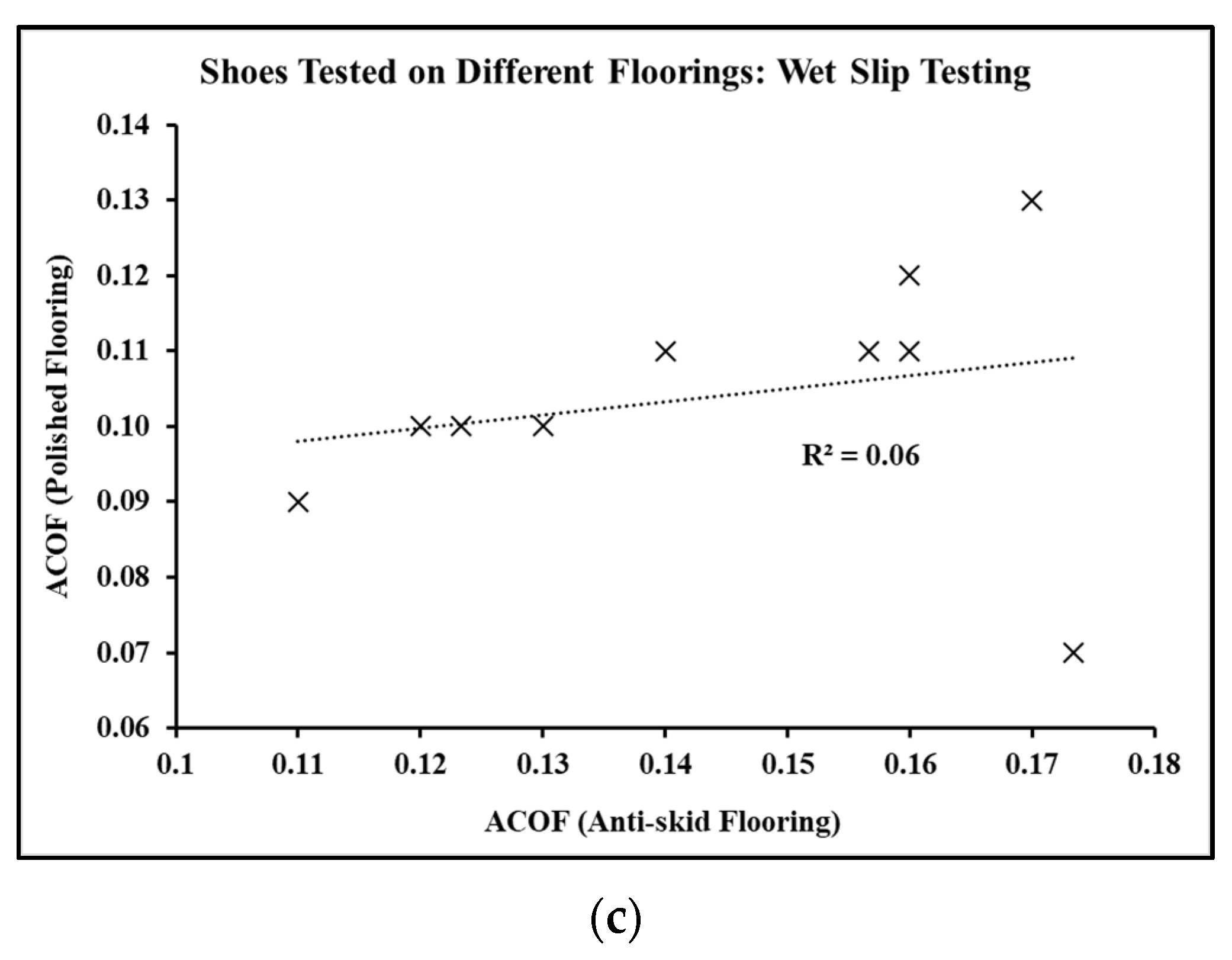
3.3. Ability of Slip Tester to Differentiate Shoes Tested on Different Floorings
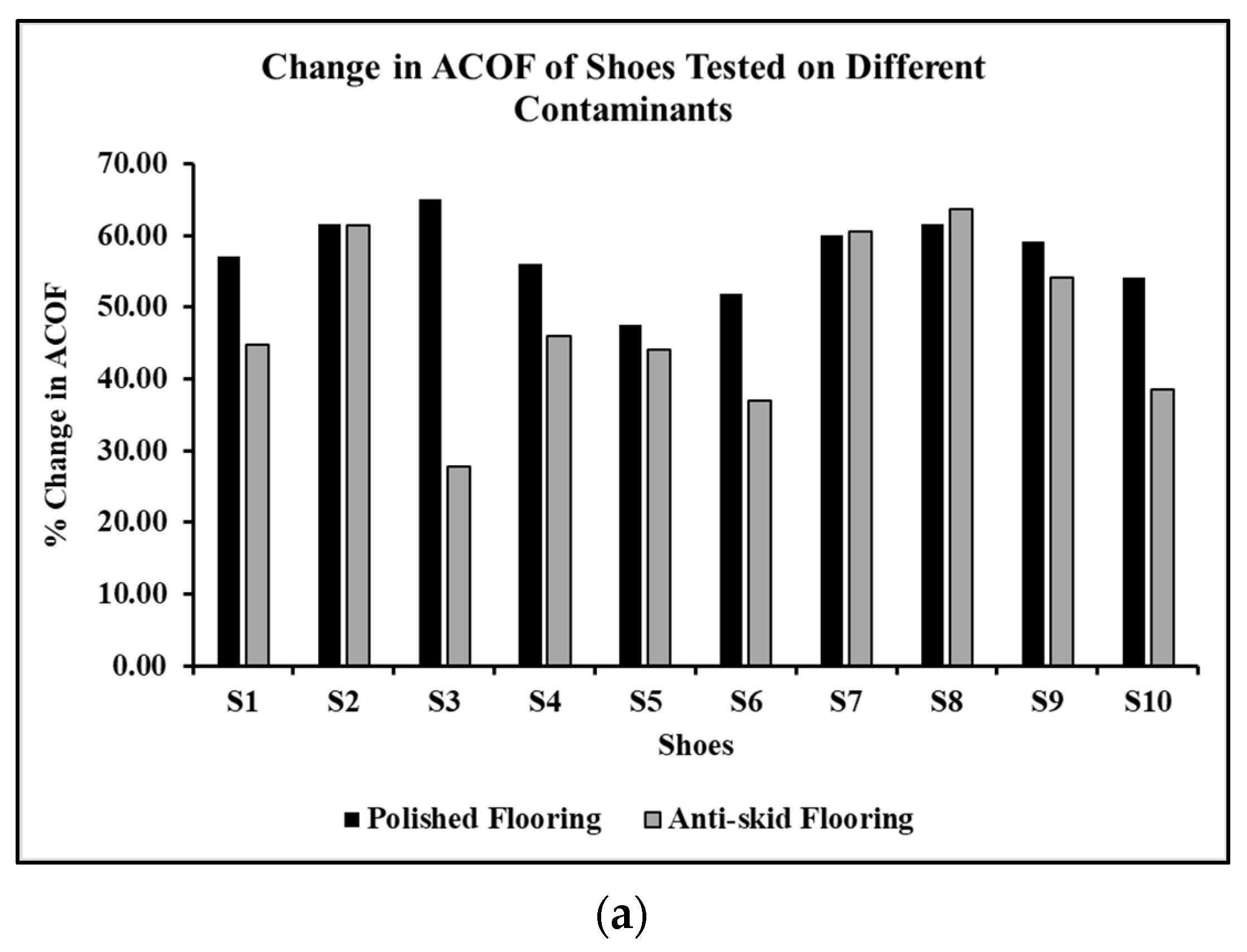
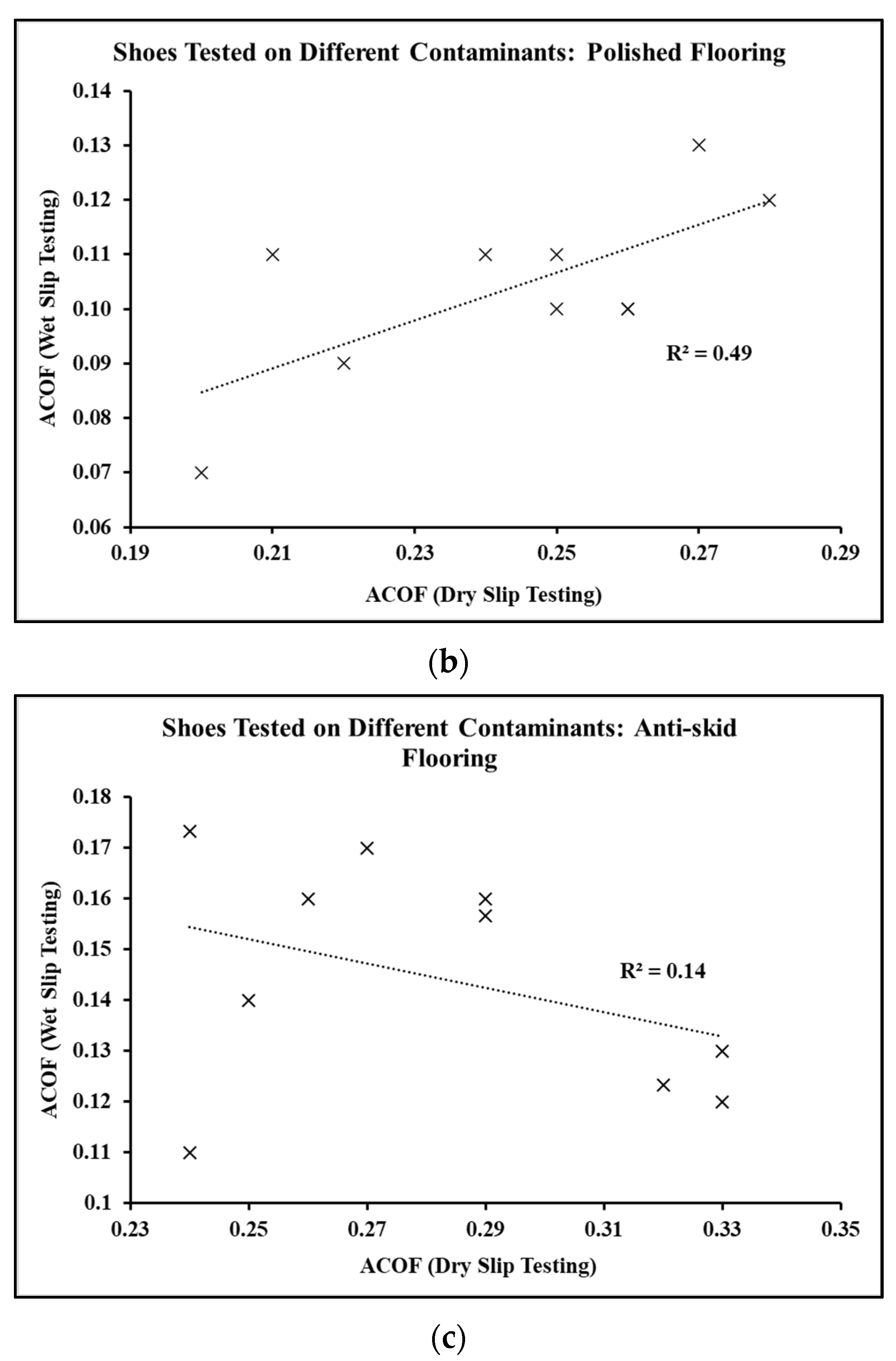
3.4. Ability of Slip Tester to Differentiate Shoes Tested with Different Contaminants
4. Discussions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- U.S. Bureau of Labor Statistics. Number of Nonfatal Occupational Injuries and Illnesses Involving Days Away from Work by Industry and Selected Events or Exposures Leading to Injury or Illness, Private Industry. 2020. Available online: https://www.cdc.gov/niosh/topics/violence/fastfacts.html (accessed on 13 April 2022).
- Layne, L.A.; Pollack, K.M. Nonfatal occupational injuries from slips, trips, and falls among older workers treated in hospital emergency departments, United States 1998. Am. J. Ind. Med. 2004, 46, 32–41. [Google Scholar] [CrossRef] [PubMed]
- Luo, G.; Stefanyshyn, D. Identification of critical traction values for maximum athletic performance. Footwear Sci. 2011, 3, 127–138. [Google Scholar] [CrossRef]
- Berg, W.P.; Alessio, H.M.; Mills, E.M.; Tong, C. Circumstances and consequences of falls in independent community-dwelling older adults. Age Ageing 1997, 26, 261–268. [Google Scholar] [CrossRef] [PubMed]
- Bell, J.L.; Collins, J.W.; Wolf, L.; Gronqvist, R.; Chiou, S.; Chang, W.R.; Sorock, G.S.; Courtney, T.K.; Lombardi, D.A.; Evanoff, B. Evaluation of a comprehensive slip, trip and fall prevention programme for hospital employees. Ergonomics 2009, 51, 1906–1925. [Google Scholar] [CrossRef] [PubMed]
- Campbell, A.J.; Borrie, M.J.; Spears, G.F.; Jackson, S.L.; Brown, J.S.; Fitzgerald, J.L. Circumstances and Consequences of Falls Experienced by a Community Population 70 Years and over during a Prospective Study. Age Ageing 1990, 19, 136–141. [Google Scholar] [CrossRef]
- Gupta, S.; Chatterjee, S.; Chanda, A. Effect of footwear material wear on slips and falls. Mater Today Proc. 2022, 62, 3508–3515. [Google Scholar] [CrossRef]
- Iraqi, A.; Beschorner, K.E. Vertical ground reaction forces during unexpected human slips. Proc. Hum. Factors Ergon. Soc. 2017, 61, 924–928. [Google Scholar] [CrossRef]
- Chang, W.R.; Grönqvist, R.; Leclercq, S.; Myung, R.; Makkonen, L.; Strandberg, L.; Brungraber, R.J.; Mattke, U.; Thorpe, S.C. The role of friction in the measurement of slipperiness, Part 1: Friction mechanisms and definition of test conditions. Ergonomics 2010, 44, 1217–1232. [Google Scholar] [CrossRef]
- Beschorner, K.E.; Redfern, M.S.; Porter, W.L.; Debski, R.E. Effects of slip testing parameters on measured coefficient of friction. Appl. Ergon. 2007, 38, 773–780. [Google Scholar] [CrossRef]
- Iraqi, A.; Cham, R.; Redfern, M.S.; Beschorner, K.E. Coefficient of friction testing parameters influence the prediction of human slips. Appl. Ergon. 2018, 70, 118–126. [Google Scholar] [CrossRef]
- Iraqi, A.; Vidic, N.S.; Redfern, M.S.; Beschorner, K.E. Prediction of coefficient of friction based on footwear outsole features. Appl. Ergon. 2020, 82, 102963. [Google Scholar] [CrossRef] [PubMed]
- Chanda, A.; Jones, T.G.; Beschorner, K.E. Generalizability of Footwear Traction Performance across Flooring and Contaminant Conditions. IISE Trans. Occup. Ergon. Hum. Factors 2018, 6, 98–108. [Google Scholar] [CrossRef] [PubMed]
- Chatterjee, S.; Chanda, A. Development of a Tribofidelic Human Heel Surrogate for Barefoot Slip Testing. J. Bionic. Eng. 2022, 19, 429–439. [Google Scholar] [CrossRef]
- Deshpande, N.; Metter, E.J.; Lauretani, F.; Bandinelli, S.; Guralnik, J.; Ferrucci, L. Activity restriction induced by fear of falling and objective and subjective measures of physical function: A prospective cohort study. J. Am. Geriatr. Soc. 2011, 26, 1805–1810. [Google Scholar] [CrossRef]
- Chatterjee, S.; Gupta, S.; Chanda, A. Barefoot slip risk assessment of Indian manufactured ceramic flooring tiles. Mater. Today Proc. 2022, 62, 3699–3706. [Google Scholar] [CrossRef]
- Jones, T.; Iraqi, A.; Beschorner, K. Performance testing of work shoes labeled as slip resistant. Appl. Ergon. 2018, 68, 304–312. [Google Scholar] [CrossRef]
- Meehan, E.E.; Vidic, N.; Beschorner, K.E. In contrast to slip-resistant shoes, fluid drainage capacity explains friction performance across shoes that are not slip-resistant. Appl. Ergon. 2022, 100, 103663. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Katsurashima, Y.; Hokkirigawa, K. Effect of rubber block height and orientation on the coefficients of friction against smooth steel surface lubricated with glycerol solution. Tribol. Int. 2017, 110, 96–102. [Google Scholar] [CrossRef]
- Hemler, S.L.; Charbonneau, D.N.; Beschorner, K.E. Effects of Shoe Wear on Slipping-Implications for Shoe Replacement Threshold. Proc. Hum. Factors Ergon. Soc. Annu. Meet. 2017, 61, 1424–1428. [Google Scholar] [CrossRef]
- Sundaram, V.H.; Hemler, S.L.; Chanda, A.; Haight, J.M.; Redfern, M.S.; Beschorner, K.E. Worn region size of shoe outsole impacts human slips: Testing a mechanistic model. J. Biomech. 2020, 105, 109797. [Google Scholar] [CrossRef]
- Chang, W.R.; Grönqvist, R.; Leclercq, S.; Brungraber, R.J.; Mattke, U.; Strandberg, L.; Thorpe, S.C.; Myung, R.; Makkonen, L.; Courtney, T.K. The role of friction in the measurement of slipperiness, Part 2, Survey of friction measurement devices. Ergonomics 2001, 44, 1233–1261. [Google Scholar] [CrossRef] [PubMed]
- Chang, W.R.; Lesch, M.F.; Chang, C.C. The effect of contact area on friction measured with the portable inclinable articulated strut slip tester (PIAST). Ergonomics 2009, 51, 1984–1997. [Google Scholar] [CrossRef] [PubMed]
- Bergström, A.; Åström, H.; Magnusson, R. Friction Measurement on Cycleways Using a Portable Friction Tester. J. Cold Reg. Eng. 2003, 17, 37–57. [Google Scholar] [CrossRef]
- Andres, R.O.; Chaffin, D.B. Ergonomic analysis of slip-resistance measurement devices. Ergonomics 2007, 28, 1065–1079. [Google Scholar] [CrossRef]
- Grönqvist, R.; Roine, J.; Järvinen, E.; Korhonen, E. An apparatus and a method for determining the slip resistance of shoes and floors by simulation of human foot motions. Ergonomics 2007, 32, 979–995. [Google Scholar] [CrossRef]
- Blanchette, M.G.; Powers, C.M. The influence of footwear tread groove parameters on available friction. Appl. Ergon. 2015, 50, 237–241. [Google Scholar] [CrossRef]
- Beschorner, K.E.; Iraqi, A.; Redfern, M.S.; Cham, R.; Li, Y. Predicting slips based on the STM 603 whole-footwear tribometer under different coefficient of friction testing conditions. Ergonomics 2019, 62, 668–681. [Google Scholar] [CrossRef]
- Beschorner, K.E.; Chanda, A.; Moyer, B.E.; Reasinger, A.; Griffin, S.C.; Johnston, I.M. Validating the ability of a portable shoe-floor friction testing device, NextSTEPS, to predict human slips. Appl. Ergon. 2023, 106, 103854. [Google Scholar] [CrossRef]
- Shibata, K.; Abe, S.; Yamaguchi, T.; Hokkirigawa, K. Development of a Cart-type Friction Measurement Device for Evaluation of Slip Resistance of Floor Sheets. J. JAPAN Soc. Des. Eng. 2016, 51, 721–736. [Google Scholar] [CrossRef]
- Yamaguchi, T.; Yamada, R.; Warita, I.; Shibata, K.; Ohnishi, A.; Sugama, A.; Hinoshita, M.; Sakauchi, K.; Matsukawa, S.; Hokkirigawa, K. Relationship between slip angle in ramp test and coefficient of friction values at shoe-floor interface measured with cart-type friction measurement device. J. Biomech. Sci. Eng. 2018, 13, 17–00389. [Google Scholar] [CrossRef]
- Aschan, C.; Hirvonen, M.; Mannelin, T.; Rajamäki, E. Development and validation of a novel portable slip simulator. Appl. Ergon. 2005, 36, 585–593. [Google Scholar] [CrossRef] [PubMed]
- Albert, D.; Moyer, B.; Beschorner, K.E. Three-Dimensional Shoe Kinematics During Unexpected Slips: Implications for Shoe–Floor Friction Testing. Ergonomics 2016, 5, 1–11. [Google Scholar] [CrossRef]
- Keshan, H.; Thornburg, J.; Ustun, T.S. Comparison of lead-Acid and lithium ion batteries for stationary storage in off-grid energy systems. IET Conf. Publ. 2016, 2016, 1–7. [Google Scholar] [CrossRef]
- Yuan, Q.; Chen, I.M. Localization and velocity tracking of human via 3 IMU sensors. Sens. Actuators A Phys. 2014, 212, 25–33. [Google Scholar] [CrossRef]
- Moghaddam, S.R.M.; Hemler, S.L.; Redfern, M.S.; Jacobs, T.D.B.; Beschorner, K.E. Computational model of shoe wear progression: Comparison with experimental results. Wear 2019, 422–423, 235–241. [Google Scholar] [CrossRef]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gupta, S.; Malviya, A.; Chatterjee, S.; Chanda, A. Development of a Portable Device for Surface Traction Characterization at the Shoe–Floor Interface. Surfaces 2022, 5, 504-520. https://doi.org/10.3390/surfaces5040036
Gupta S, Malviya A, Chatterjee S, Chanda A. Development of a Portable Device for Surface Traction Characterization at the Shoe–Floor Interface. Surfaces. 2022; 5(4):504-520. https://doi.org/10.3390/surfaces5040036
Chicago/Turabian StyleGupta, Shubham, Ayush Malviya, Subhodip Chatterjee, and Arnab Chanda. 2022. "Development of a Portable Device for Surface Traction Characterization at the Shoe–Floor Interface" Surfaces 5, no. 4: 504-520. https://doi.org/10.3390/surfaces5040036
APA StyleGupta, S., Malviya, A., Chatterjee, S., & Chanda, A. (2022). Development of a Portable Device for Surface Traction Characterization at the Shoe–Floor Interface. Surfaces, 5(4), 504-520. https://doi.org/10.3390/surfaces5040036