New Concept for Studying the Classical and Quantum Three-Body Problem: Fundamental Irreversibility and Time’s Arrow of Dynamical Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
One geometry cannot be more accurate than another, it may only be more convenient... A. Poincaré
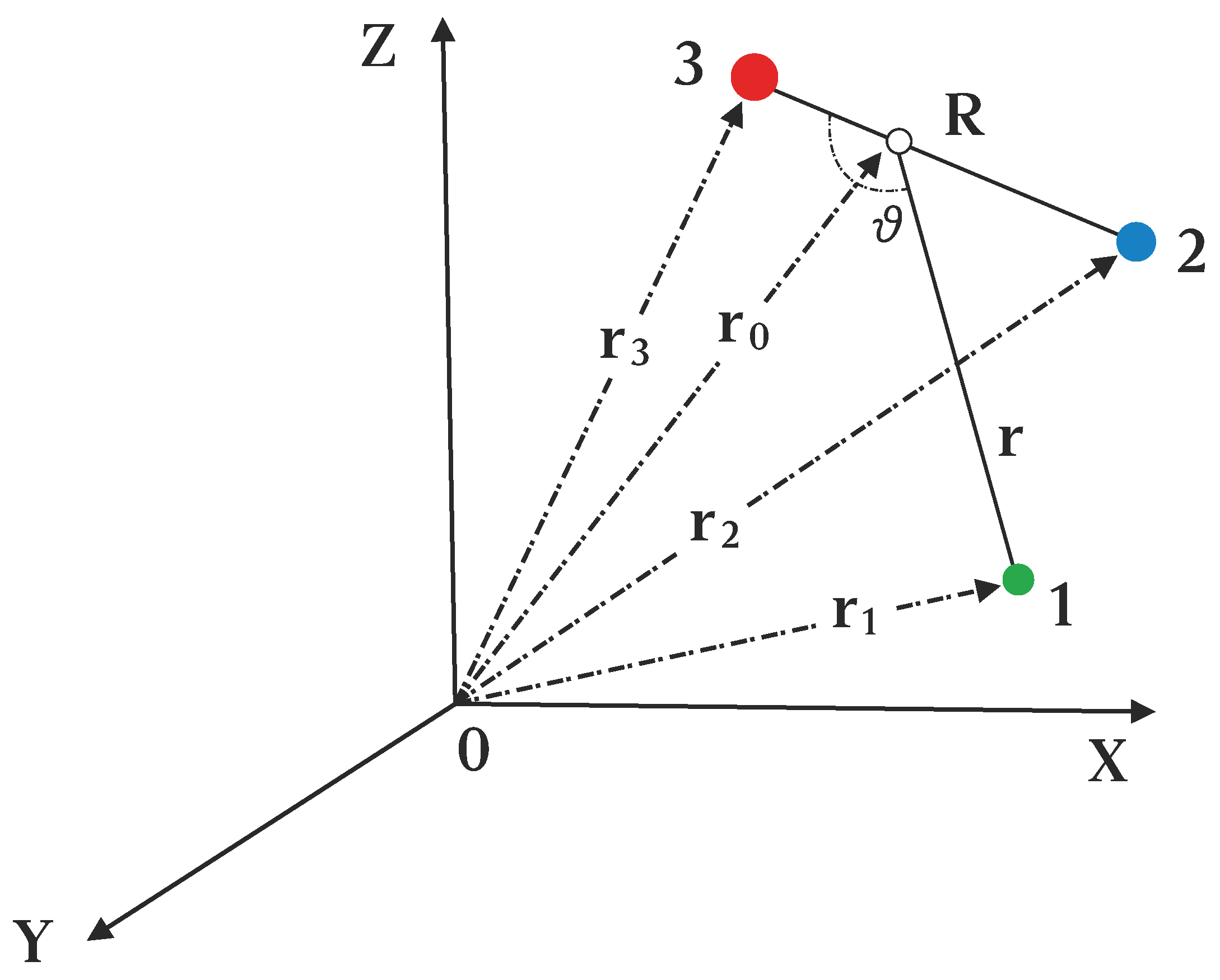
2. The Classical Three-Body Problem
3. Three-Body Problem as a Problem of Geodesic Flows on Riemannian Manifold
Reduced Hamiltonian in the Internal Space
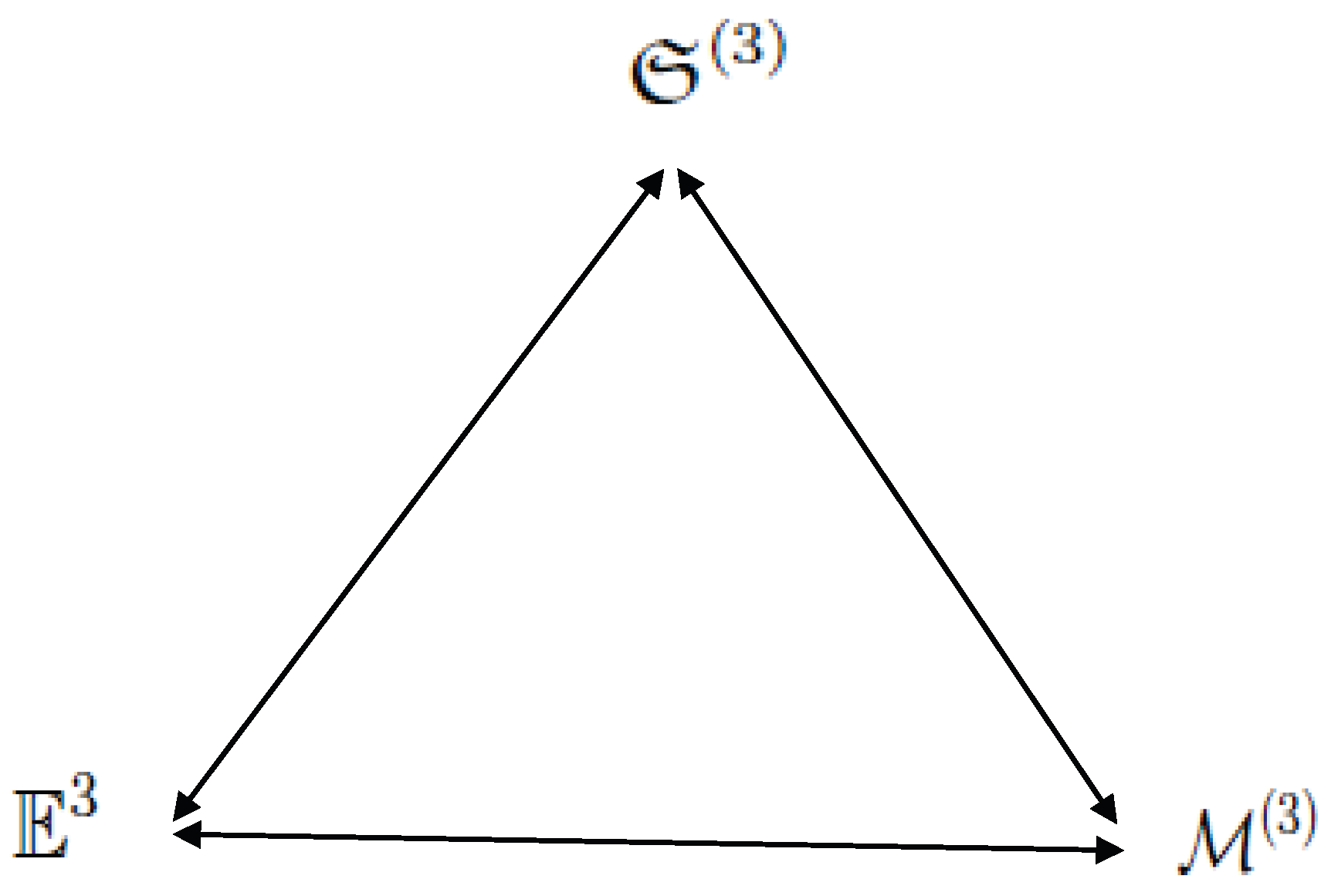
4. The Mappings between 6D Euclidean and 6D Conformal-Euclidean Subspaces
- When , the system of Equation (26) obviously describes a restricted three-body problem.
- When , we are dealing with a typical scattering problem in a three-body system.
- When . This is a special and very important case, which, generally speaking, requires an extension of the Maupertuis-Hamilton principle of least action on the case of complex-classical trajectories. In this article, we will touch upon this problem problem when considering a restricted three-body problem.
On a Homeomorphism between the Subspace and the Manifold
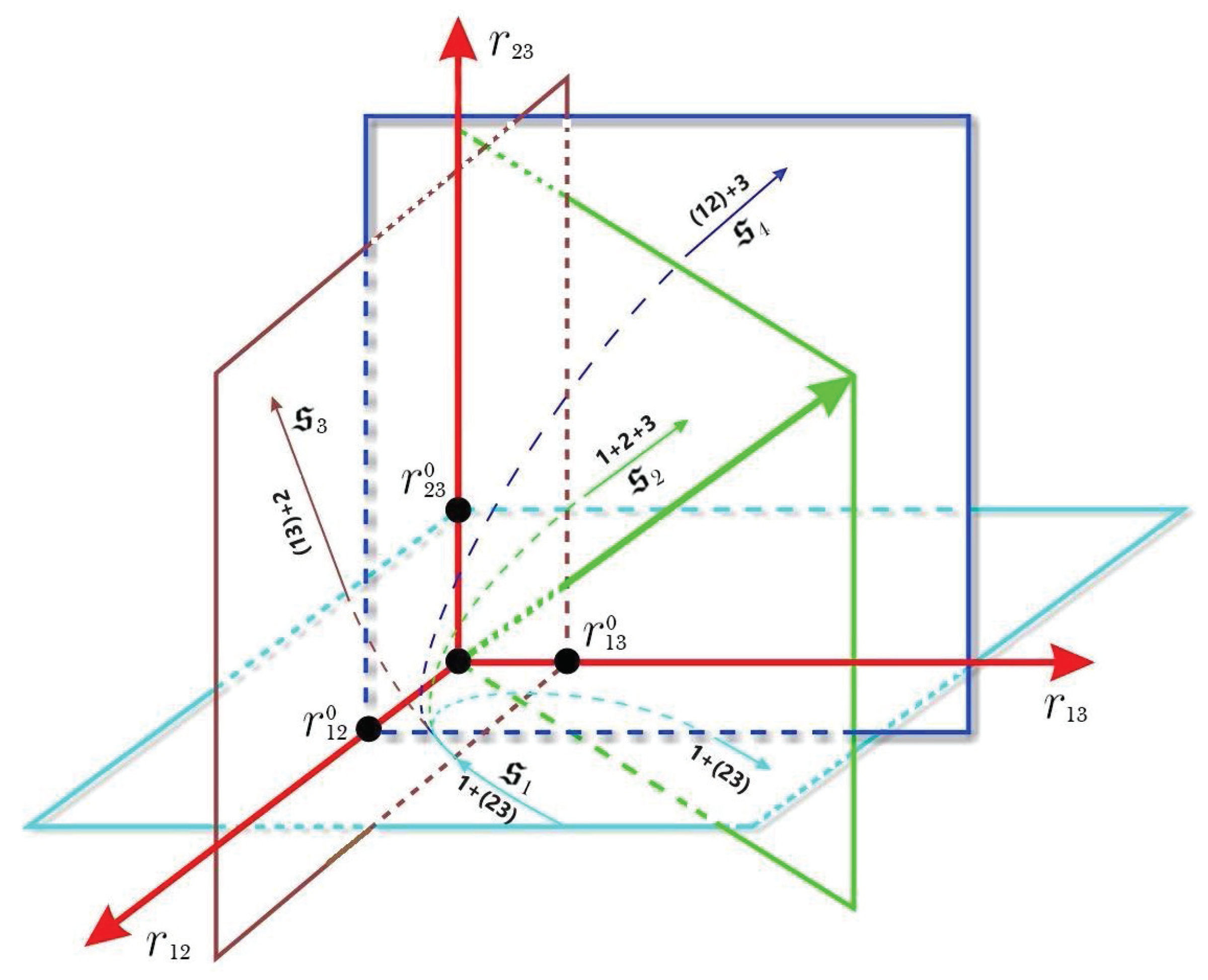
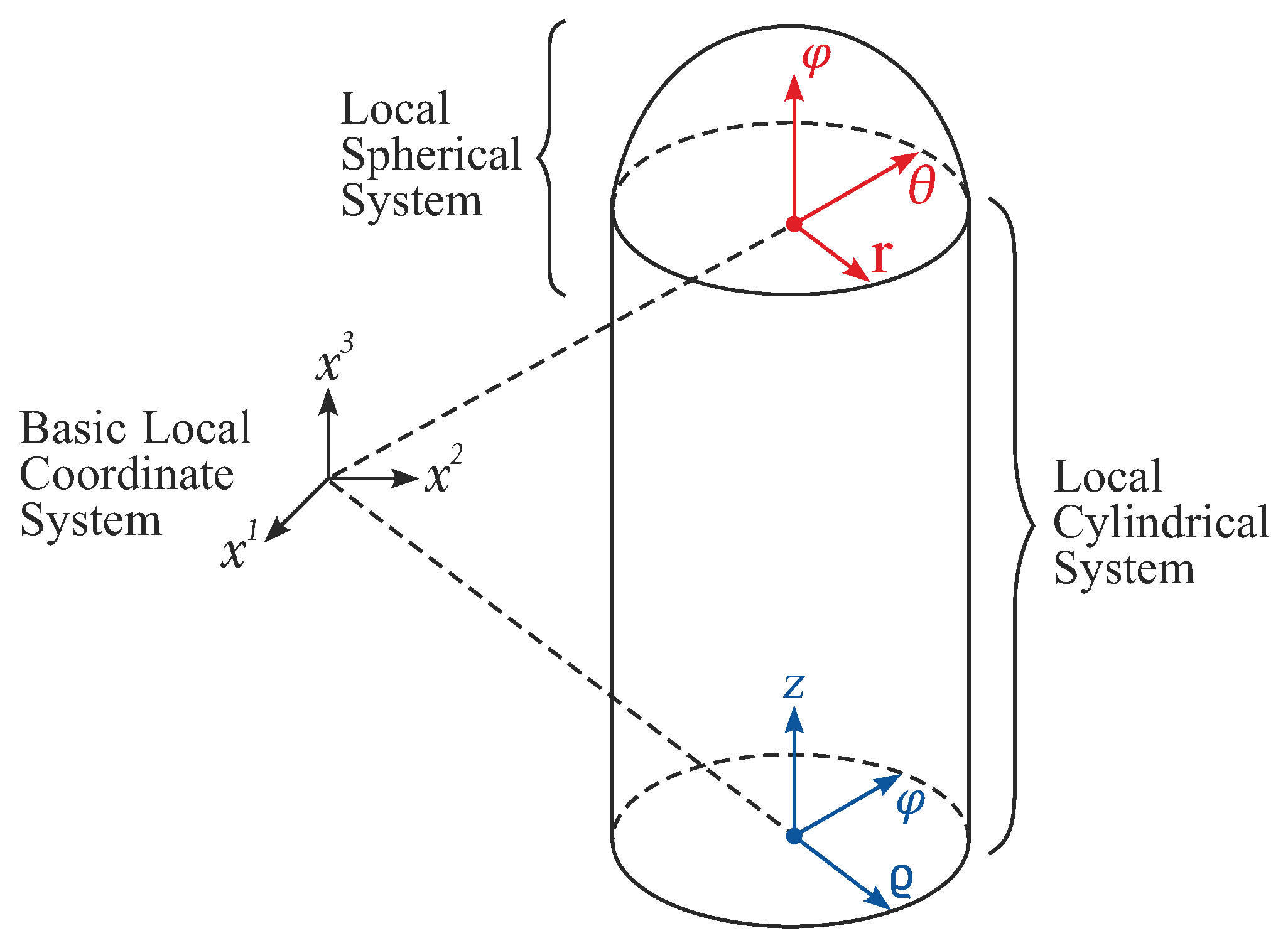
5. Transformations between Global and Local Coordinate Systems and Features of Internal Time
6. The Restricted Three-Body Problem with Holonomic Connections
7. Deviation of Geodesic Trajectories of One Family
8. Three-Body System in a Random Environment
9. A New Criterion for Estimating Chaos in Classical Systems
10. The Quantum Three-Body Problem on Conformal-Euclidean Manifold
- When three bodies form a bound state, i.e., , and, accordingly,
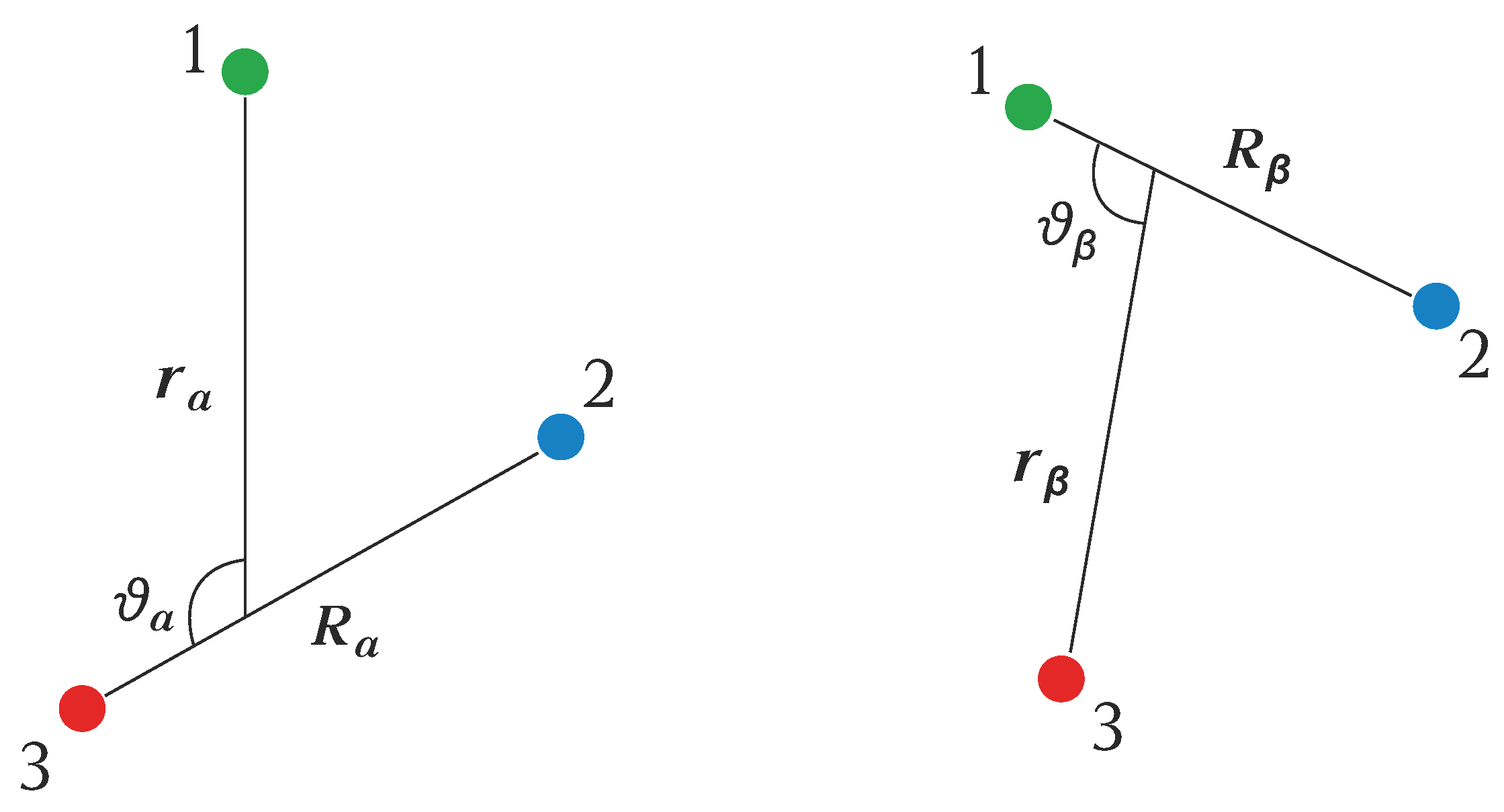
- when scattering in a system occurs with a rearrangement of bodies, for example; (see Scheme 1). Recall that in this case the scattering processes in the system occur under the condition
10.1. The Three-Body Coupled States
10.2. Quantum Multichannel Scattering in a Three-Body System
11. Conclusions
- The Riemannian geometry with its local coordinate system in the most general case allows us to reveal additional hidden symmetries of the internal motion of a dynamical system. This circumstance makes it possible to reduce the dynamical system from the 18th to the 6th order (see Equation (26)) instead of the generally accepted 8th order. In case when the energy of the system is fixed, the dynamical problem is reduced to a 5th-order system. Obviously, the fact of a more complete reduction of the equations system is very useful for creating efficient algorithms for numerical simulation. Note that the obtained system of differential equations differs in principle from the Newtonian equations in that it is symmetric with respect to all variables and is non-linear since it includes quadratic terms of the velocity projections. These equations play a crucial role in deriving equations for a probability distributions of geodesic flows both in the phase and configuration spaces.
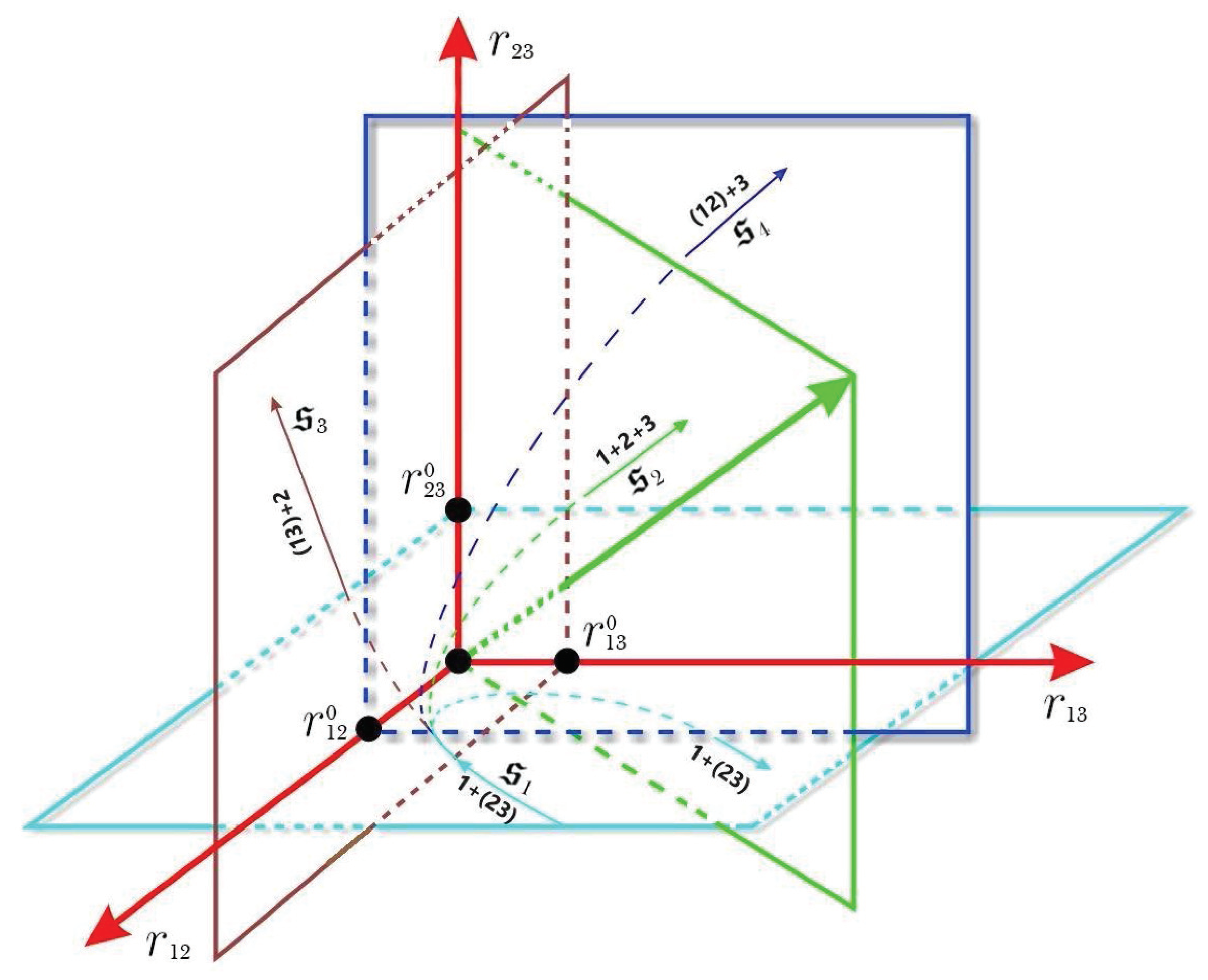
- The equivalence between the Newtonian three-body problem (16) and the problem of geodesic flows on the Riemannian manifold (26) provides the coordinate transformations (43) together with the system of algebraic Equation (37). Note that due to the algebraic system, which is absent in Krylov’s representation, the chronological parameter of the s dynamical system, conventionally called internal time s (see Figure 3), can branch and fluctuate. Moreover, in some intervals it may show a chaotic character that essentially distinguishes it from usual time t. As the analysis shows, the internal time in this microscopic classical problem has the same non-trivial behavior as the time’s arrow of more complex systems [81]. Obviously, internal time “s” makes the system of Equation (26) irreversible, because it has a structure and an arrow of development, which significantly distinguishes it from ordinary time t. The latter radically changes our understanding of time as a trivial parameter that chronologizing events in a dynamical system and connects the past with the future through the present. And, in spite of the pessimistic statements of Bergson and Prigogine [82,83,84], a new approach, in our view, will allow classical mechanics to describe the whole spectrum of various phenomena, including the irreversibility inherent of elementary atomic-molecular processes.
- The developed representation allows taking into account external regular and random forces on the evolution of the dynamical system without using perturbation theory methods. In particular, equations have been obtained that describe the propagation of probabilistic flows of geodesic trajectories in both the phase space (54) and the configuration space (58). Note that this makes it possible to calculate the probabilities of elementary transitions between different asymptotic subspaces taking into account the multichannel character of scattering with all its complexities.
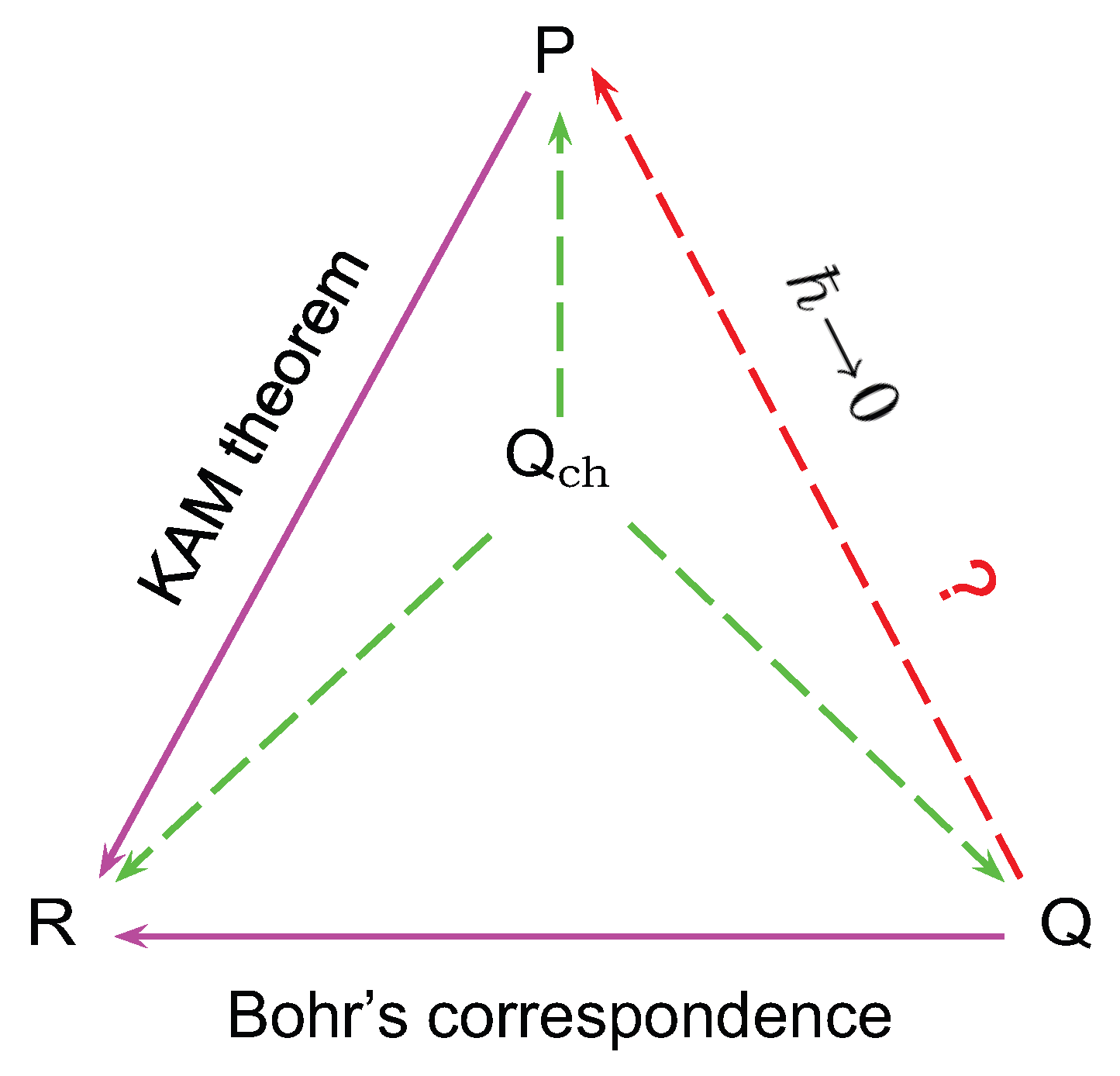
- The quantization of the reduced Hamiltonian (27), taking into account algebraic Equation (37) and coordinate transformations (43) makes the quantum-mechanical Equations (62) and (64) irreversible. This circumstance is a necessary condition for generating chaos in the wave function. The latter without violating the quantum generalization of Arnold’s theorem, in the limit allows us to make the transition from the quantum region to the region of classical chaotic motion, that solves an important open problem of the quantum-classical correspondence (see [66,67]).
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B



Appendix C
Appendix D
Appendix E
- Case 1: When , there are three real solutions:
- Case 2: When , depending on the sign of the parameter , there are three possible solutions.
- , there is one real solution:
- , in this case, the real solution is:
- , in this case, the real solution, accordingly, has the form:
- Case 3: When , there are three real solutions, however, two of them coincide:
Appendix F
Appendix G
- Into the algebraic equation:when one of the inequalities holds; or , or when take place of both inequalities and , and, accordingly,
- Into the ODE for the radial wave function of bodies system (see (68) ), if and .
- Case 2. When and , the Wigner symbol is calculated in the same way and gives the result similarly (A42).
- Case 3. When , in addition, and . For this case we obtain:
Appendix H
References
- Poincaré, H. New Methods of Celestial Mechanics; American Institute of Physics: Woodbury, NY, USA; Springer: Berlin, Germany, 1993; Volume 1, Chapter 1. [Google Scholar]
- Whittaker, E.T. A Treatise on the Analytical Dynamicals of Particles and Rigid Bodies; With an Introduction to the Problem of Three Bodies; University Press in Cambridge: Cambridgeshire, UK, 1988. [Google Scholar]
- Chenciner, A. Poincaré and the Three-Body Problem, Poincaré, 1912–2012; Séminaire Poincaré XVI; Springer: Berlin, Germany, 2012; pp. 45–133. [Google Scholar]
- Valtonen, M.; Karttunen, H. The Three-Body Problem; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Lin, F.J. Symplectic reduction, geometric phase, and internal dynamicals in three-body molecular dynamicals. Phys. Lett. A 1997, 234, 291–300. [Google Scholar] [CrossRef]
- Lemaître, G. The Three-Body Problem, NASA CR-110. Available at NASA Technical Report Server; 1964. Available online: http://ntrs.nasa.gov/ (accessed on 29 July 2020).
- Bruns, E.H. Über die Integrale des Vielekörperproblems. Acta Math. 1887, 11, 25. [Google Scholar] [CrossRef]
- Arnold, V.I.; Kozlov, V.V.; Neishtadt, A.I. Mathematical Aspects of Classical and Celestial Mechanics, 3rd ed.; Dynamical Systems III, Encyclopaedia of Mathematical Sciences; Springer: Berlin, Germany, 2006; Volume 3. [Google Scholar]
- Marchal, C. The Three-Body Problem; Elsevier: Amsterdam, The Netherlands, 2006. [Google Scholar]
- Bruno, A.D. The Restricted Three-Body Problem: Plane Periodic Orbits; Walter de Gruyter: Berlin, Germany, 1994. [Google Scholar]
- Šuvakov, M.; Dmitrašinovič, V. Three Classes of Newtonian Three-Body Planar Periodic Orbits. Phys. Rev. Lett. 2013, 110, 114301. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Liao, S. More than six hundred new families of Newtonian periodic planar collisionless three-body orbits. Sci. China Phys. Mech. Astron. 2017, 60, 129511. [Google Scholar] [CrossRef] [Green Version]
- Orlov, V.; Titov, V.; Shombina, L. Periodic orbits in the free-fall three-body problem. Astron. Rep. 2016, 60, 1083–1089. [Google Scholar] [CrossRef]
- Li, X.; Jing, Y.; Liao, S. Over a thousand new periodic orbits of a planar three-body system with unequal masses. Publ. Astron. Soc. Jpn. 2018, 70, 64. [Google Scholar] [CrossRef]
- Herschbach, D.R. Reactive collisions in crossed molecular beams. Discuss. Faraday Soc. 1962, 33, 149–161. [Google Scholar] [CrossRef] [Green Version]
- Levine, R.D.; Bernstein, R.B. Molecular Reaction Dynamicals and Chemical Reactivity; Oxford University Press: New York, NY, USA, 1987. [Google Scholar]
- Cross, R.J.; Herschbach, D.R. Classical scattering of an atom from a diatomic rigid rotor. J. Chem. Phys. 1965, 43, 3530–3540. [Google Scholar] [CrossRef]
- Guichardet, A. On rotation and vibration motions of molecules. Ann. Inst. H. Poincaré, Phys. Tháor. 1984, 40, 329–342. [Google Scholar]
- Iwai, T. A geometric setting for classical molecular dynamicals. Ann. Inst. H. Poincaré Phys. Tháor. 1987, 47, 199–219. [Google Scholar]
- Lin, F.J. Hamiltonian dynamics of atom-diatomic molecular complexes and collisions. Disc. Cont. Dyn. Syst. Suppl. 2007, 2007, 655–666. [Google Scholar]
- Kryulov, N.S. Foundations of Statistical Physics; Princeton University Press: Princeton, NJ, USA; Guildford, UK, 1980; p. 283. [Google Scholar]
- Savvidy, G.K. The Yang-Mills classical mechanics as a Kolmogorov K-system. Phys. Lett. B 1983, 130, 303–307. [Google Scholar] [CrossRef]
- Gurzadian, V.G.; Savvidy, G.K. On Problem of Relaxation of Stellar System. Dokl. AN SSSR 1984, 277, 69–73. [Google Scholar]
- Gurzadian, V.G.; Savvidy, G.K. Collective Relaxation of Stellar Systems. Astron. Astrophys. 1986, 160, 203–210. [Google Scholar]
- Gevorkyan, A.S. On reduction of the general three-body Newtonian problem and the curved geometry. J. Phys. Conf. Ser. 2014, 496, 012030. [Google Scholar] [CrossRef] [Green Version]
- Ayryan, E.A.; Gevorkyan, A.S.; Sevastyanova, L.A. On the Motion of a Three Body System on Hypersurface of Proper Energy. Phys. Part. Nucl. Lett. 2013, 10, 1–8. [Google Scholar] [CrossRef]
- Gevorkyan, A.S. On the motion of classical three-body system with consideration of quantum fluctuations. Phys. Atomic Nucl. 2017, 80, 358–365. [Google Scholar] [CrossRef] [Green Version]
- Gevorkyan, A.S. The Three-body Problem in Riemannian Geometry. Hidden Irreversibility of the Classical Dynamical System. Lob. J. Math. 2019, 40, 1058–1068. [Google Scholar] [CrossRef]
- Briggs, G.A.D.; Butterfield, J.N.; Zeilinger, A. The Oxford Questions on the foundations of quantum physics. Proc. R. Soc. A 2013, 469, 20130299. [Google Scholar] [CrossRef] [Green Version]
- Devlin, K.J. The Millennium Problems: The Seven Greatest Unsolved Mathematical Puzzles of Our Time; Basic Books: New York, NY, USA, 2002; ISBN 0-465-01729-0. [Google Scholar]
- Delves, L.M. Tertiary and general-order collisions. Nucl. Phys. 1958, 9, 391–399. [Google Scholar] [CrossRef]
- Klar, H. Use of alternative hyperspherical coordinates for three-body systems. J. Math. Phys. 1985, 26, 1621. [Google Scholar] [CrossRef]
- Johnson, B.R. The classical dynamicals of three particles in hyperspherical coordinates. J. Chem. Phys. 1980, 73, 5051. [Google Scholar] [CrossRef]
- Ragni, M.G.; Bitencourt, A.C.P.; Aquilanti, V. Hyperspherical and related types of coordinates for the dynamical treatment of three-body systems. In Topics in the Theory of Chemical and Physical Systems; Springer: Berlin, Germany, 2007. [Google Scholar]
- Smorodinski, Y.A.; Efros, V.D. Orthogonal Transformations of Multidimensional Angular Harmonics. Sov. J. Nucl. Phys. 1973, 76, 107. [Google Scholar]
- Kupperman, A. Reactive Scattering with Row-Orthonormal Hyperspherical Coordinates. 2. Transformation Properties and Hamiltonian for Tetraatomic Systems. J. Phys. Chem. A 1997, 101, 6368–6383. [Google Scholar] [CrossRef]
- Schatz, G.C.; Kupperman, A. A classical path approach to reactive scattering. Chem. Phys. 1976, 65, 4642. [Google Scholar]
- Soloviev, E.A.; Vinitsky, S.I. Suitable coordinates for the three-body problem in the adiabatic representation. J. Phys. 1985, B18, 557. [Google Scholar] [CrossRef]
- Gusev, V.V.; Puzynin, V.I.; Kostrykin, V.V.; Kvitsinsky, A.A.; Merkuriev, S.P.; Ponomarev, L.I. Adiabatic hyperspherical approach to the Coulomb three-body problem: Theory and numerical method. Few-Body Syst. 1990, 9, 137. [Google Scholar] [CrossRef]
- Fiziev, P.P.; Fizieva, T.Y. Modification of Hyperspherical Coordinates in the Classical Three-Particle Problem. Few-Body Syst. 1987, 2, 71–80. [Google Scholar] [CrossRef]
- Arnold, V.I. Mathematical Methods of Classical Mechanics. In Graduate Texts in Mathematics, 2nd ed.; Springer: Berlin, Germany, 1989; Volume 60. [Google Scholar]
- Norden, A.P. Spaces with an Affine Connection; Nauka: Moscow-Leningrad, Russia, 1976. (In Russian) [Google Scholar]
- Dubrovin, B.A.; Fomenko, A.T.; Novikov, S.P. Modern Geometry Methods and Applications: Part I; Springer: Berlin, Germany, 1984. [Google Scholar]
- James, R.C. Advanced Calculus; Wadsworth: Belmont, CA, USA, 1966. [Google Scholar]
- Poincaré, H. Sur le problème des trois corps et les èquations de la dynamique. Acta Math. 1890, 13, 1–270. [Google Scholar]
- Poincaré, H. Œuvres VII, 262–490 (Theorem 1 Section 8). Available online: https://eprints.soton.ac.uk/398356/1/2016%2520Mathematical%2520Source%2520References.pdf (accessed on 29 July 2020).
- Carathéodory, C. Über den Wiederkehrsatz von Poincaré; Walter de Gruyter: Berlin, Germany, 1919; pp. 580–584. [Google Scholar]
- Euler, L. Nov. Commun. Acad. Imp. Petropolitanae 1760, 10, 207–242.
- Euler, L. Nov. Commun. Acad. Imp. Petropolitanae 1760, 11, 152–184.
- Euler, L. Mém. Acad. Berl. 1760, 11, 228–249.
- Lagrange, J.-L. Mećanique Analytique, Courcier; Cambridge University Press: Cambridge, UK, 2009. [Google Scholar]
- Hill, G.W. Researches in the lunar theory. Am. J. Math. 1878, 1, 5–26, 129–147, 245–260. [Google Scholar] [CrossRef]
- Broucke, R.; Boggs, D. Periodic orbits in the planar general three-body problem. Celest. Mech. 1975, 11, 13. [Google Scholar] [CrossRef]
- Hadjidemetriou, J.D.; Christides, T. Families of periodic orbits in the planar three-body problem. Celest. Mech. 1975, 12, 175. [Google Scholar] [CrossRef]
- Henon, M. A family of periodic solutions of the planar three-body problem, and their stability. Celest. Mech. 1976, 13, 267. [Google Scholar] [CrossRef]
- Klatskin, J.I. Statistical Description of Dynamical System with Fluctuating Parameters; Nauka: Moscow, Russia, 1975. [Google Scholar]
- Lifshits, I.M.; Gredeskul, S.A.; Pastur, L.A. Introduction to the Theory of Disordered Systems; John Wiley and Sons: Hoboken, NJ, USA, 1988. [Google Scholar]
- Wigner, E.P. On the quantum correction for thermodynamical equilibrium. Phys. Rev. 1932, 40, 749–759. [Google Scholar] [CrossRef]
- Weyl, H. The Theory of Groups and Quantum Mechanics; Dover: New York, NY, USA, 1931. [Google Scholar]
- Nelson, E. Derivation of the Schrödinger equation from Newtonian mechanics. Phys. Rev. 1966, 150, 1079–1085. [Google Scholar] [CrossRef]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Skorniakov, G.V.; Ter-Martirosian, K.A. Three Body Problem for Short Range Forces. I. Scattering of Low Energy Neutrons by Deuterons. Sov. Phys. JETP 1957, 4, 648–660. [Google Scholar]
- Faddeev, L.D. Scattering theory for a three-particle system. Sov. Phys. JETP 1961, 12, 1014–1019. [Google Scholar]
- Kosloff, R. Time-dependent quantum-mechanical methods for molecular dynamics. J. Phys. Chem. 1988, 92, 2087. [Google Scholar] [CrossRef]
- Balint-Kurti, G.G. Wavepacket theory of photodissociation and reactive scattering. Adv. Chem. Phys. 2003, 128, 244. [Google Scholar]
- Hannay, J.H.; Berry, M.V. Quantization of linear maps on a torus-fresnel diffraction by a periodic grating. Physics D 1980, 1, 267. [Google Scholar] [CrossRef]
- Schuster, H.G. Deterministic Chaos: An Introduction; Wiley: Hoboken, NJ, USA, 1984. [Google Scholar]
- Pöschel, J. A Lecture on the Classical KAM Theorem. Proc. Symp. Pure Math. 2001, 2000, 707–732. [Google Scholar]
- Sommerfeld, A.; Hartmann, H. Künstliche grenzbedingungen in der wellenmechanik. der beschränkte rotator. Ann. Der. Phys. 1940, 37, 333–343. [Google Scholar] [CrossRef]
- Arfken, G.B.; Weber, H.J. Mathematical Methods for Physicists; Academic Press: Cambridge, MA, USA, 2001; ISBN 978-0-12-059825-0. [Google Scholar]
- Newton, R.G. Scattering Theory of Waves and Particles; McGraw-Hill Book Company: New York, NY, USA, 1966. [Google Scholar]
- Gevorkyan, A.S.; Balint-Kurti, G.; Nyman, G. A New Approach To The Evaluation of the S -Matrix in Atom-Diatom Quantum Reactive Scattering Theory. arXiv 2006, arXiv:physics/0607093. [Google Scholar]
- Edmonds, A.R. Angular Momentum in Quantum Mechanics; Princeton University Press: Princeton, NJ, USA, 1960. [Google Scholar]
- Zare, R.N. Angular Momentum, Understanding Special Abstracts in Chemistry and Physics; John Wiley and Sons: New York, NY, USA, 1986; Volume 349. [Google Scholar]
- Wigner, E.P. Group Theory and Its Application to the Quantum Mechanics of Atomic Spectra; Academic Press: New York, NY, USA, 1959. [Google Scholar]
- Gevorkyan, A.S. Dissertation of the Dr. Sci. Microscopic Models of Collisions and Relaxations in the Dynamics of Chemical Reacting Gas; S.Un.St-P.: St. Petersburg, Russia, 2000; p. 275. [Google Scholar]
- Gevorkyan, A.S.; Balint-Kurti, G.G.; Nyman, G. Novel algorithm for simulation of 3D quantum reactive atom-diatom scattering. Procedia Comput. Sci. 2010, 1, 1195–1201. [Google Scholar] [CrossRef] [Green Version]
- Walker, R.B.; Light, J.C.; Altenberger-Siczek, A. Chemical reaction theory for asymetric atom-molecular collisions. J. Chem. Phys. 1976, 64, 1166. [Google Scholar] [CrossRef]
- Gutzwiller, M.C. Chaos in Classical and Quantum Mechanics; Springer: New York, NY, USA, 1990. [Google Scholar]
- Gevorkyan, A.S.; Bogdanov, A.V.; Nyman, G. Regular and chaotic quantum dynamics in atom-diatom reactive collisions. Phys. Atomic Nucl. 2008, 71, 876–883. [Google Scholar] [CrossRef]
- Misra, B.; Prigogine, I. Irreversibility and Nonlocality. Lett. Math. Phys. 1983, 7, 421–429. [Google Scholar] [CrossRef]
- Szendrei, E.V.; Bergson, H.; Prigogine, I. The Rediscovery of Time. Process Stud. 1989, 18, 181–193. [Google Scholar] [CrossRef]
- Bergson, H. Time and Free Will; George Allen and Unwin: London, UK; Macmillan: New York, NY, USA, 1910. [Google Scholar]
- Prigogine, I. From Being to Becoming; W. H. Freeman and Co.: San Francisco, CA, USA, 1980. [Google Scholar]
- Hobson, E.W. The Theory of Spherical and Ellipsoidal Harmonics; Cambridge Academ: Cambridge, UK, 2012; ISBN 978-1107605114. [Google Scholar]
- Wigner, E.P. On the Matrices Which Reduce the Kronecker Products of Representations of Simply Reducible Groups; Quantum Theory of Angular Momentum; Biedenharn, L.C., van Dam, H., Eds.; Academic Press: New York, NY, USA, 1965. [Google Scholar]
- Mavromatis, H.A.; Alassar, R.S. A Generalized Formula for the Integral of Three Associated Legendre Polynomials. Appl. Math. Lett. 1999, 12, 101–105. [Google Scholar] [CrossRef] [Green Version]
- Dong, S.-H.; Lemu, R. The Overlap Integral of Three Associated Legendre Polynomials. Appl. Math. Lett. 2002, 15, 541–546. [Google Scholar] [CrossRef] [Green Version]





© 2020 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gevorkyan, A.S. New Concept for Studying the Classical and Quantum Three-Body Problem: Fundamental Irreversibility and Time’s Arrow of Dynamical Systems. Particles 2020, 3, 576-620. https://doi.org/10.3390/particles3030039
Gevorkyan AS. New Concept for Studying the Classical and Quantum Three-Body Problem: Fundamental Irreversibility and Time’s Arrow of Dynamical Systems. Particles. 2020; 3(3):576-620. https://doi.org/10.3390/particles3030039
Chicago/Turabian StyleGevorkyan, A. S. 2020. "New Concept for Studying the Classical and Quantum Three-Body Problem: Fundamental Irreversibility and Time’s Arrow of Dynamical Systems" Particles 3, no. 3: 576-620. https://doi.org/10.3390/particles3030039
APA StyleGevorkyan, A. S. (2020). New Concept for Studying the Classical and Quantum Three-Body Problem: Fundamental Irreversibility and Time’s Arrow of Dynamical Systems. Particles, 3(3), 576-620. https://doi.org/10.3390/particles3030039