

Design, Optimization, and Experimental Validation of Dynamic Vibration Absorber for Vibration Suppression in Cantilevered Plate Structures



Abstract
1. Introduction
2. Theoretical Modeling
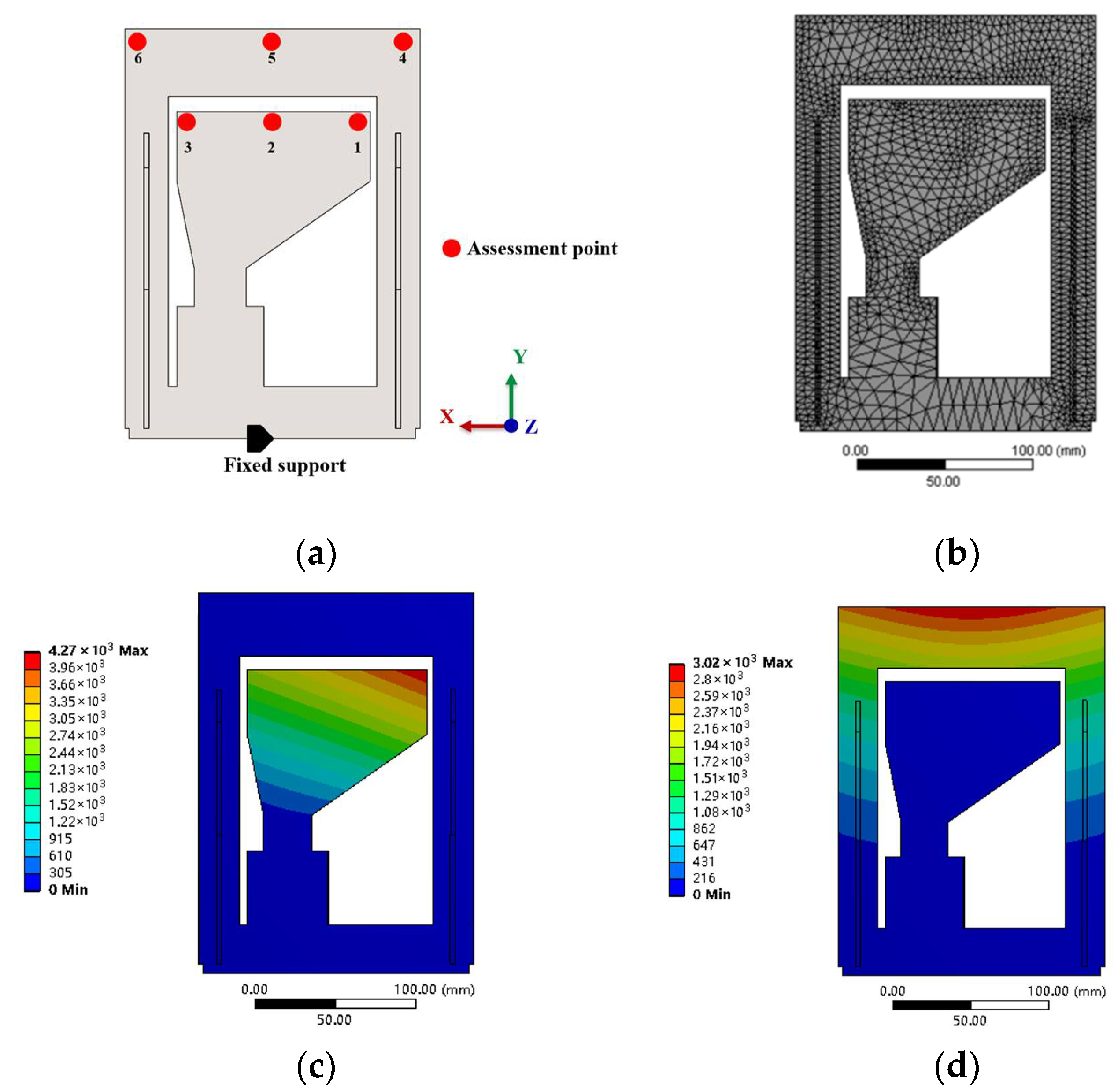
2.1. Modeling and Parametric Design of the Main Structure with DVA
2.2. Parameter Design of DVA
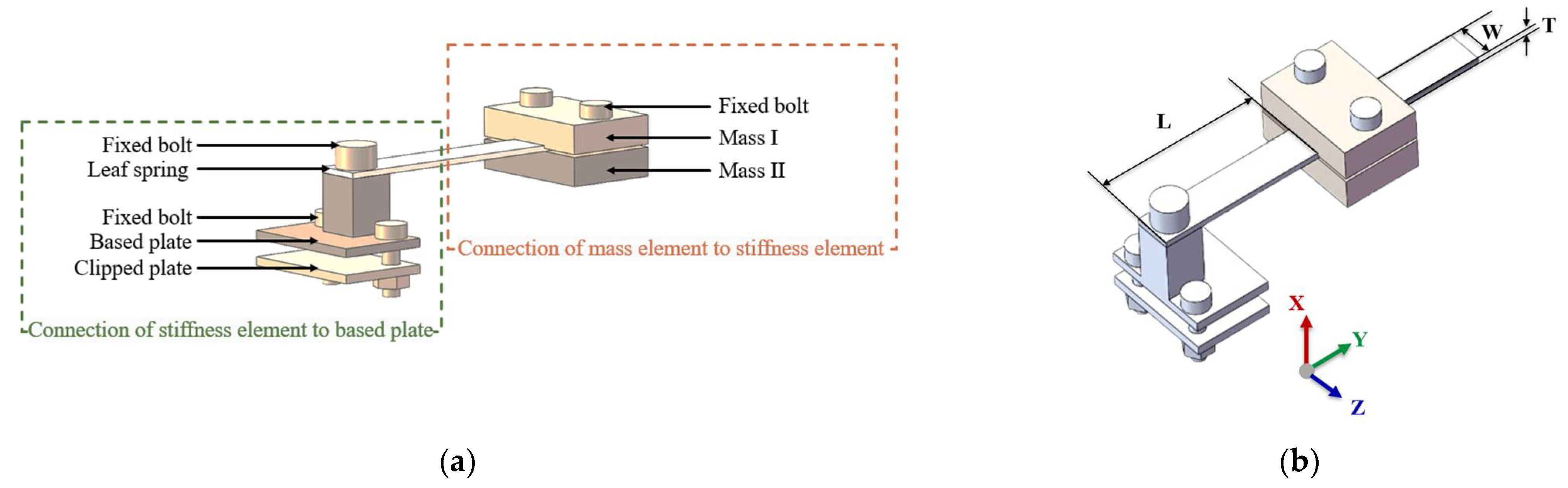
3. Structural Design of DVA
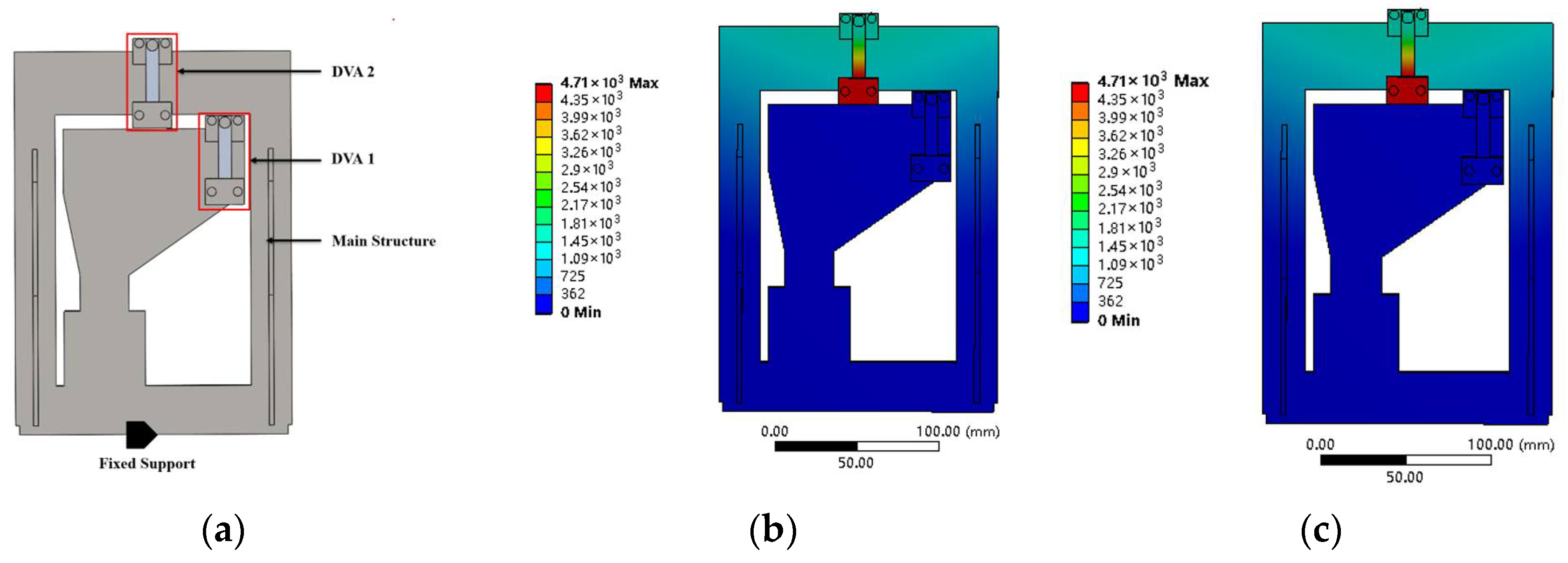
3.1. Geometrical Design and Dynamic Modeling of DVA
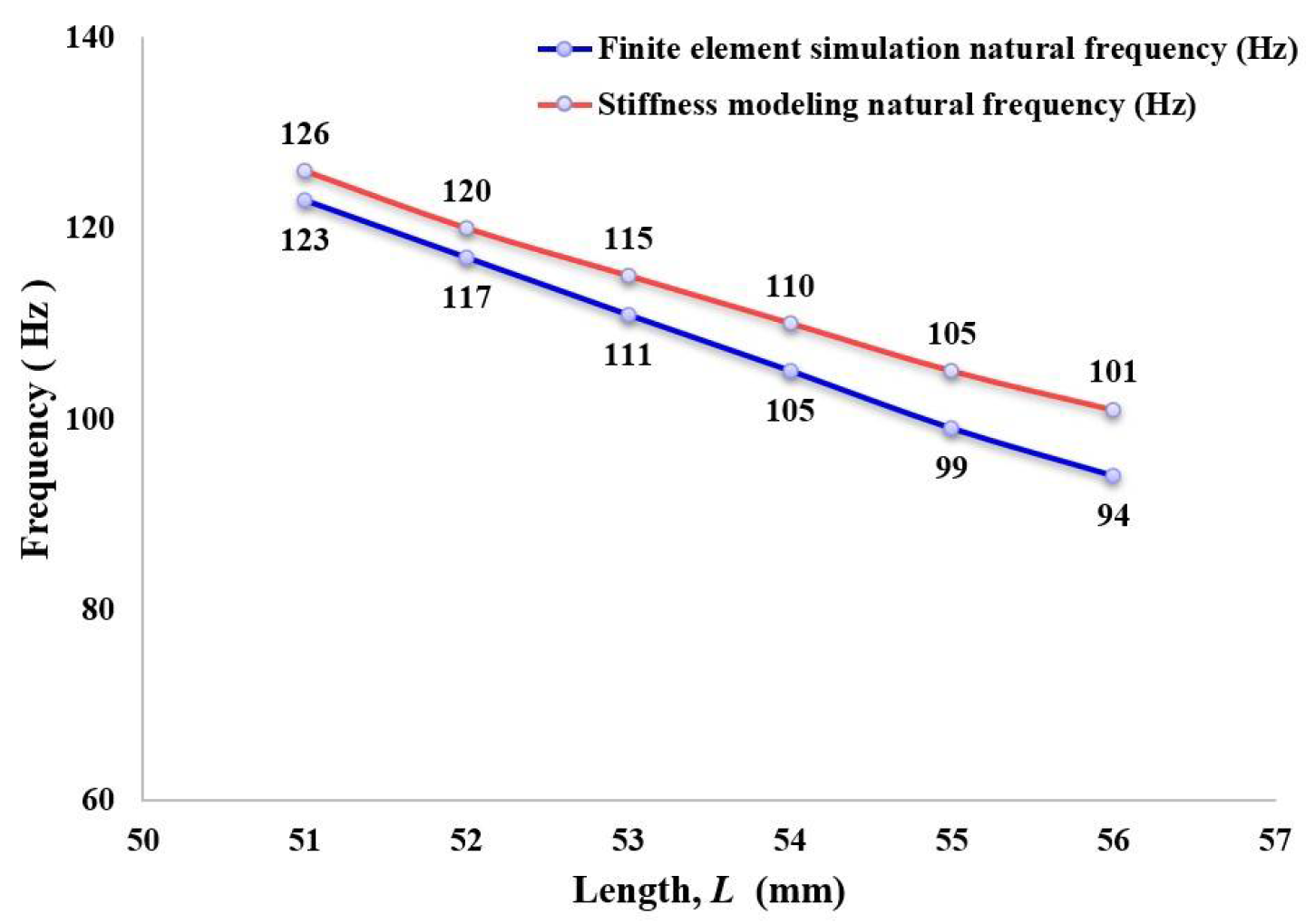
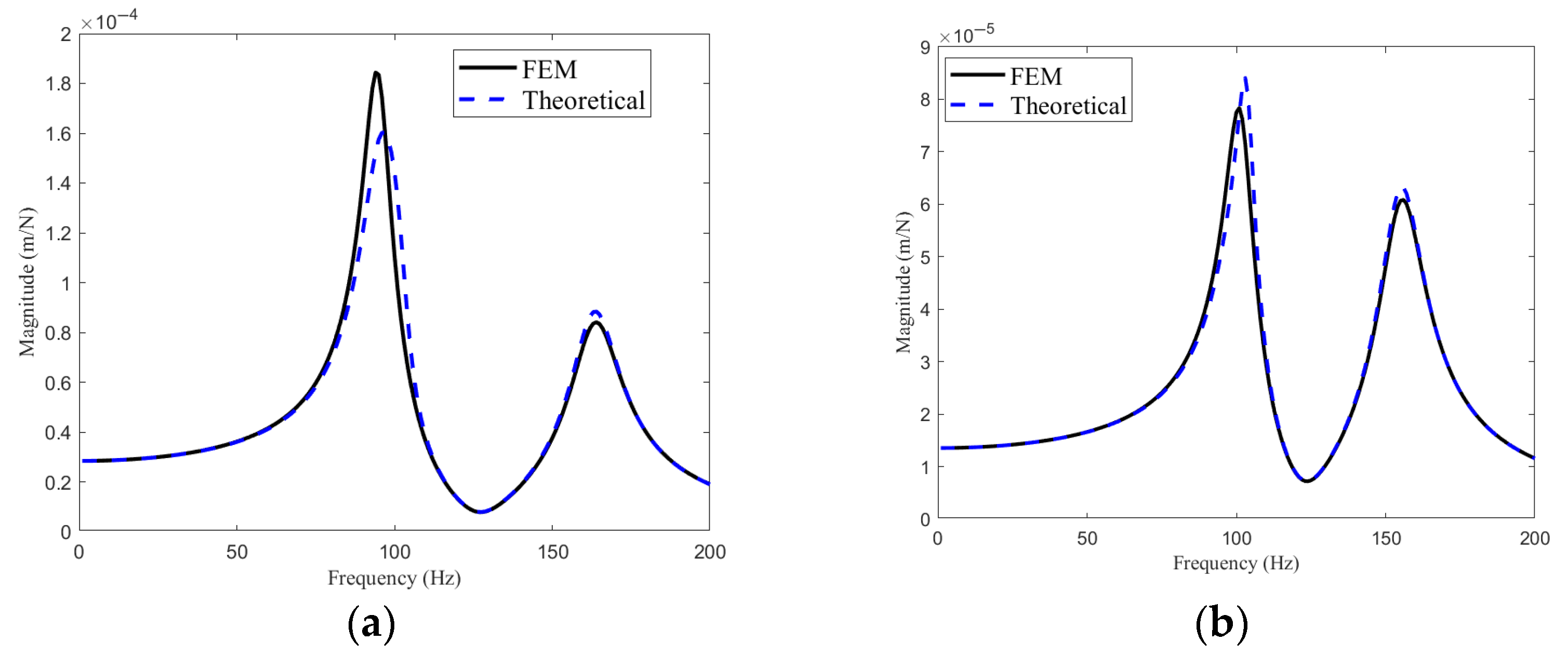
3.2. Simulation and Performance Prediction of DVAs
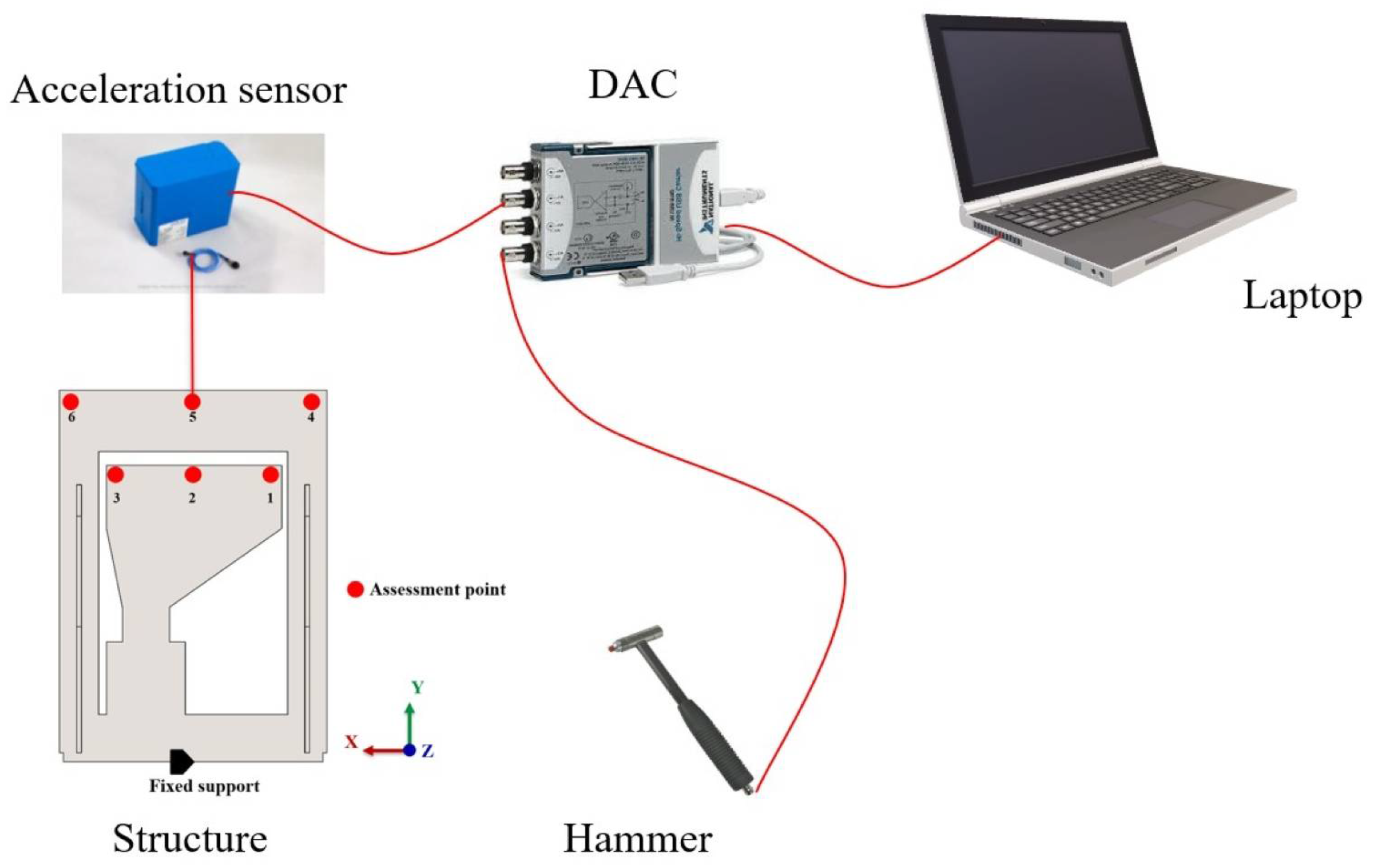
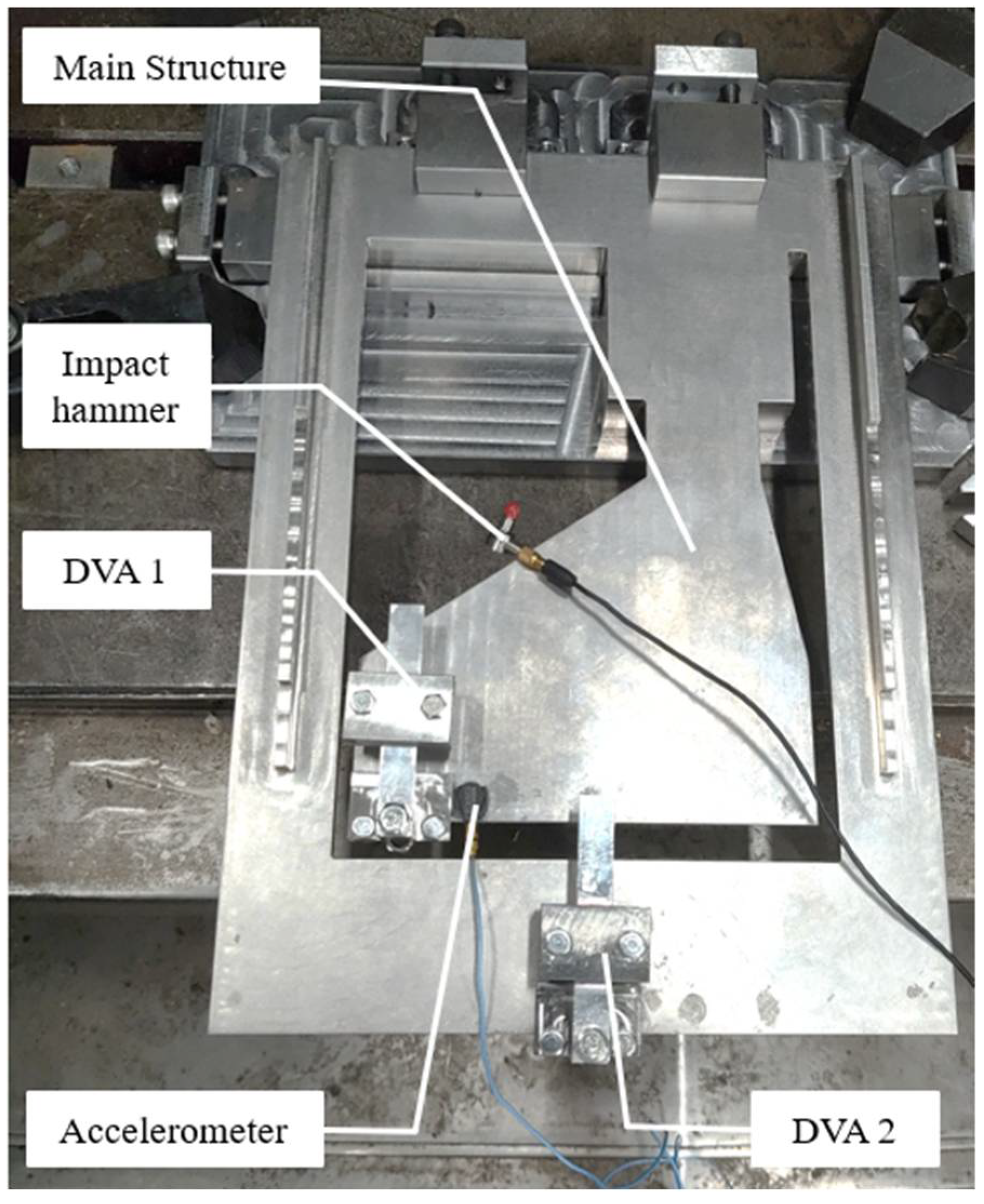
4. Experimental Verification
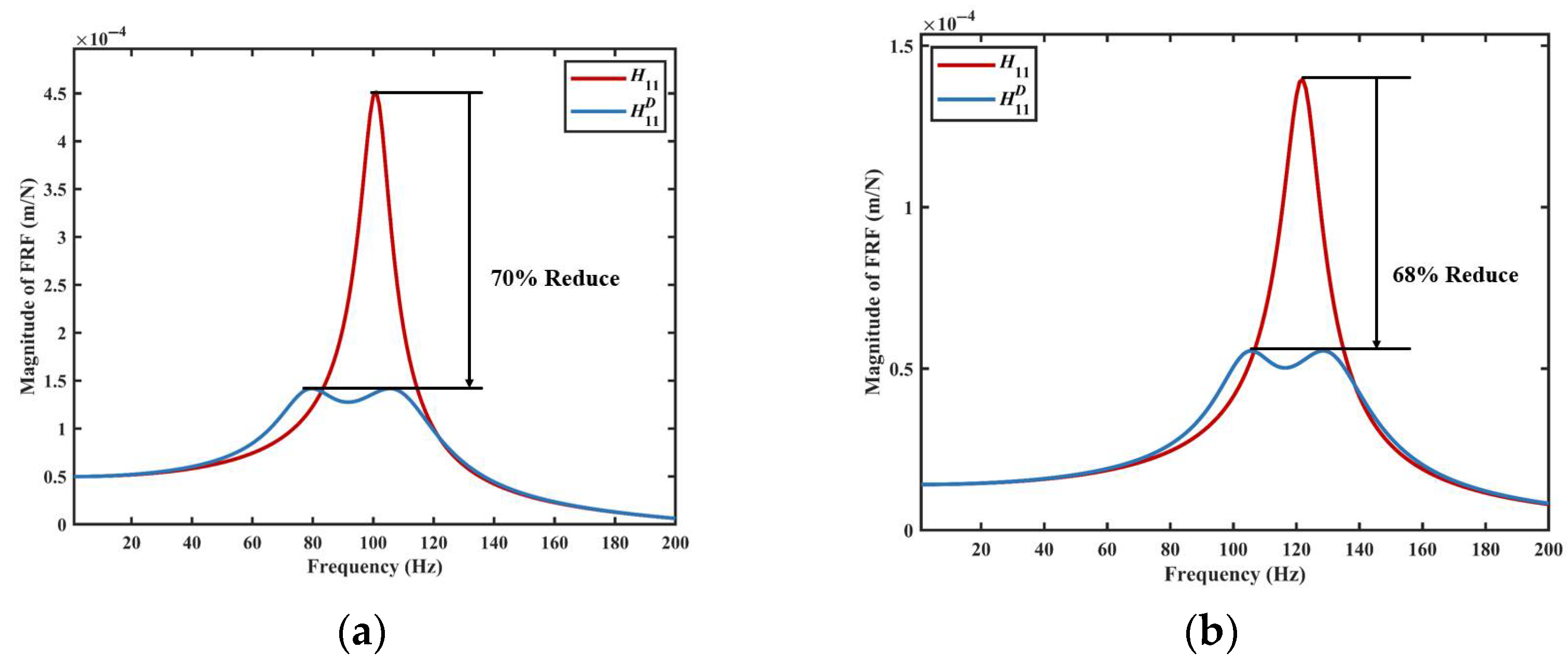
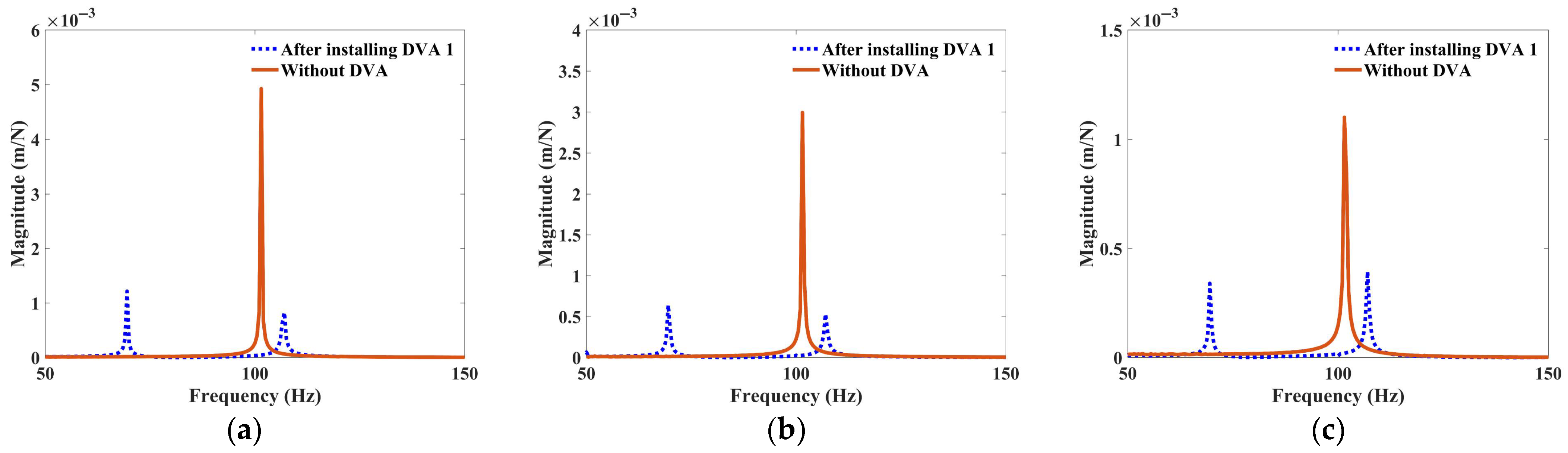
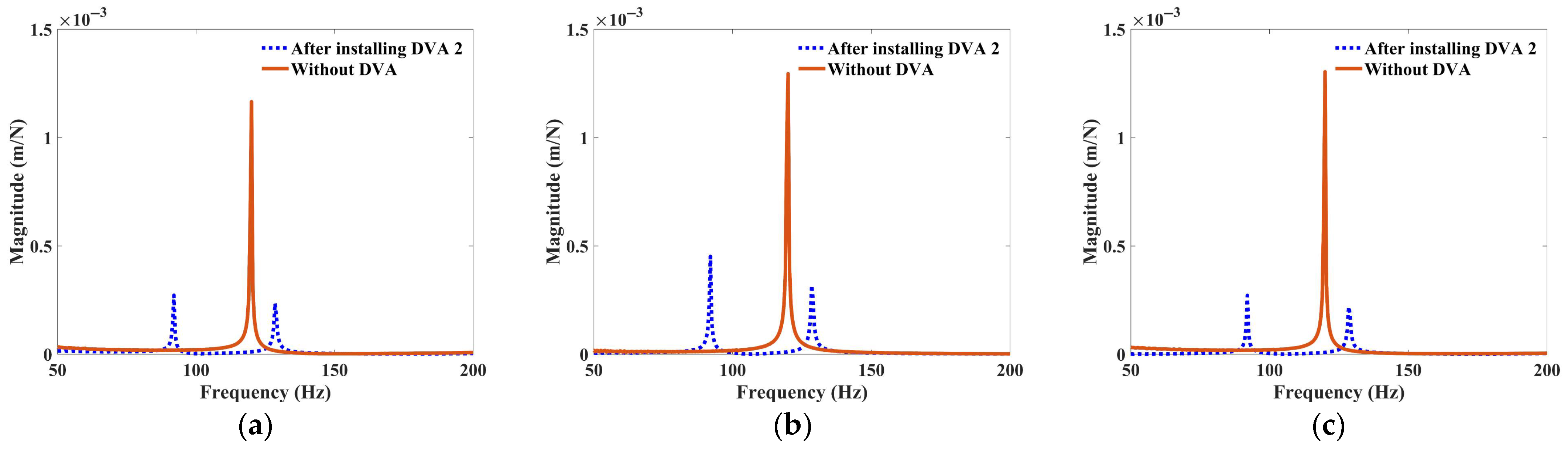
4.1. FRFs of the Main Structure with Single DVA
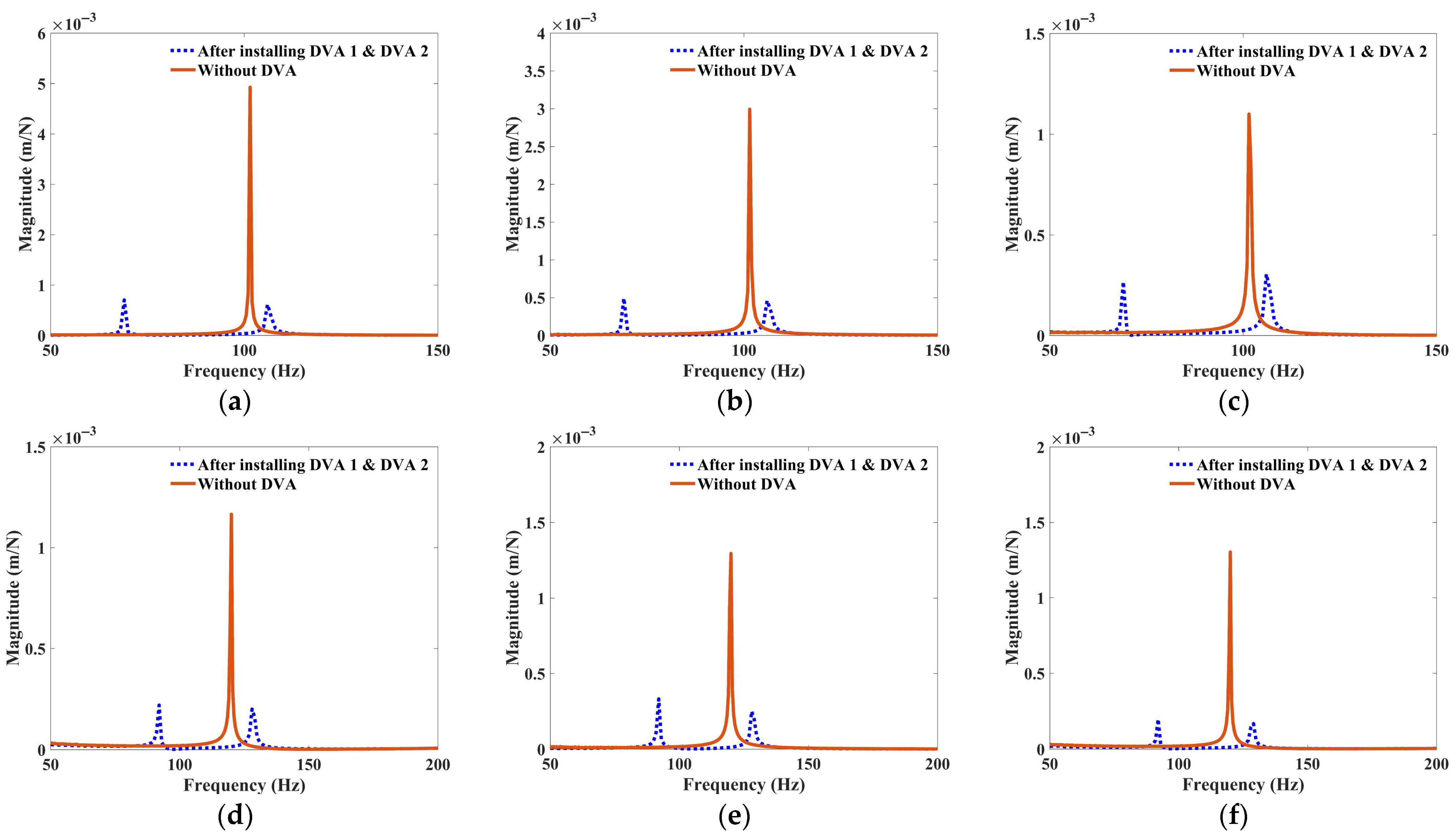
4.2. FRFs of the Main Structure with DVA1 and DVA2
5. Conclusions
- (1)
- The use of adjustable plate spring stiffness enabled precise frequency tuning while preserving mechanical simplicity.
- (2)
- Optimized DVA configurations achieved less than 4.7% deviation between theoretical and measured natural frequencies.
- (3)
- Experimental results confirmed significant vibration suppression, with amplitude reductions of 70–85% at target resonant frequencies.
- (4)
- Dual-DVA arrangements outperformed single-DVA setups, improving peak attenuation by up to 10.4% and reducing modal energy by up to 85.7% at critical assessment points.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Cho, D.S.; Kim, B.H.; Kim, J.-H.; Choi, T.M.; Vladimir, N. Free vibration analysis of stiffened panels with lumped mass and stiffness attachments. Ocean. Eng. 2016, 124, 84–93. [Google Scholar] [CrossRef]
- Damnjanović, E.; Marjanović, M.; Nefovska-Danilović, M. Free vibration analysis of stiffened and cracked laminated composite plate assemblies using shear-deformable dynamic stiffness elements. Compos. Struct. 2017, 180, 723–740. [Google Scholar] [CrossRef]
- Pellicano, F.; Mastroddi, F. Nonlinear Dynamics of a Beam on Elastic Foundation. Nonlinear Dyn. 1997, 14, 335–355. [Google Scholar] [CrossRef]
- Abolfathi, A.; Brennan, M.J.; Waters, T.P.; Tang, B. On the Effects of Mistuning a Force-Excited System Containing a Quasi-Zero-Stiffness Vibration Isolator. J. Vib. Acoust. 2015, 137, 044502. [Google Scholar] [CrossRef]
- Habib, H.S.; Tawfiq, S.S.; Sa’id, W.K. A microprocessor-based time optimal control for reduction of torsional vibration. J. Sound Vib. 1995, 180, 17–28. [Google Scholar] [CrossRef]
- Ormondroyd, J.; Den Hartog, J.P. The Theory of the Dynamic Vibration Absorber. Trans. Am. Soc. Mech. Eng. 1928, 49–50, 021007. [Google Scholar] [CrossRef]
- Asami, T.; Nishihara, O.; Baz, A.M. Analytical Solutions to H∞ and H2 Optimization of Dynamic Vibration Absorbers Attached to Damped Linear Systems. J. Vib. Acoust. 2002, 124, 284–295. [Google Scholar] [CrossRef]
- Cheung, Y.L.; Wong, W.O. H∞ and H2 optimizations of a dynamic vibration absorber for suppressing vibrations in plates. J. Sound Vib. 2009, 320, 29–42. [Google Scholar] [CrossRef]
- Liu, Y.; Cheng, L. Exact H∞ optimization of dynamic vibration absorbers: Univariate-polynomial-based algorithm and operability analysis. Appl. Math. Model. 2025, 139, 115812. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Looi, D.T. Analytical H∞ and H2 optimization for negative-stiffness inerter-based systems. Int. J. Mech. Sci. 2023, 249, 108261. [Google Scholar] [CrossRef]
- Benton, M. Devices for Damping Mechanical Vibrations, a Bibliography; Naval Research Laboratory: Washington, DC, USA, 1956. [Google Scholar]
- Liu, D.; Luo, M.; Zhang, Z.; Hu, Y.; Zhang, D. Operational modal analysis based dynamic parameters identification in milling of thin-walled workpiece. Mech. Syst. Signal Process. 2022, 167, 108469. [Google Scholar] [CrossRef]
- Askes, H.; Lombardo, M.; Nguyen, D.C.D. Homogenisation of periodic lattices with lumped and distributed mass: Beam models, continualisation and stabilisation. Int. J. Solids Struct. 2024, 302, 112988. [Google Scholar] [CrossRef]
- Frahm, H. Device for Damping Vibrations of Bodies. U.S. Patent US989958A, 18 April 1928. Available online: https://patents.google.com/patent/US989958A/en (accessed on 17 February 2025).
- Love, J.S.; Tait, M.J. Estimating the added effective damping of SDOF systems incorporating multiple dynamic vibration absorbers with nonlinear damping. Eng. Struct. 2017, 130, 154–161. [Google Scholar] [CrossRef]
- Ma, W.; Yang, Y.; Yu, J. General routine of suppressing single vibration mode by multi-DOF tuned mass damper: Application of three-DOF. Mech. Syst. Signal Process. 2019, 121, 77–96. [Google Scholar] [CrossRef]
- Raze, G.; Kerschen, G. H ∞ optimization of multiple tuned mass dampers for multimodal vibration control. Comput. Struct. 2021, 248, 106485. [Google Scholar] [CrossRef]
- Ma, W.; Yu, J.; Yang, Y. Graphical Design Methodology of Multi-Degrees-of-Freedom Tuned Mass Damper for Suppressing Multiple Modes. J. Vib. Acoust. 2021, 143, 011008. [Google Scholar] [CrossRef]
- Qin, Y.; Tan, J.J.; Hornikx, M. Application of multiple dynamic vibration absorbers in reducing low-frequency vibration of a floor-like lightweight joist structure: Comparison of experimental and computational results. Appl. Acoust. 2023, 211, 109437. [Google Scholar] [CrossRef]
- Liu, M.; Zhang, X.; Fatikow, S. Design and analysis of a multi-notched flexure hinge for compliant mechanisms. Precis. Eng. 2017, 48, 292–304. [Google Scholar] [CrossRef]
- Zhang, L.; Liu, M.; Hong, L.; Li, C.; Zhou, Z. Design and Optimization of an FBG Accelerometer Based on Single-Notch Circular Flexure Hinge for Medium-Frequency Vibration Measurement. IEEE Sensors J. 2022, 22, 20303–20311. [Google Scholar] [CrossRef]
- Shaw, A.D.; Neild, S.A.; Wagg, D.J.; Weaver, P.M.; Carrella, A. A nonlinear spring mechanism incorporating a bistable composite plate for vibration isolation. J. Sound Vib. 2013, 332, 6265–6275. [Google Scholar] [CrossRef]
- Li, W.; Wang, Z.; Brennan, M.J.; Yang, T. Design and optimization of a two-degrees-of-freedom single-sided vibro-impact nonlinear energy sink for transient vibration suppression of a thin plate. J. Sound Vib. 2024, 587, 118512. [Google Scholar] [CrossRef]
- Yang, Q.; Zhong, R.; Wang, Q.; Qin, B. Dynamic analysis and optimization of functionally graded graphene platelet stiffened plate carrying multiple vibration absorbers. Ocean. Eng. 2025, 316, 119909. [Google Scholar] [CrossRef]
- Zhang, X.; Cui, L.; Qi, H.; Wang, H.; Lin, L. Seismic fragility analysis of traditional Chinese timber structures based on a simplified lumped mass model considering joint damage. Structures 2024, 70, 107863. [Google Scholar] [CrossRef]
- Kumar, U.V.; Schmitz, T.L. Spindle dynamics identification for Receptance Coupling Substructure Analysis. Precis. Eng. 2012, 36, 435–443. [Google Scholar] [CrossRef]
- Schmitz, T.; Betters, E.; Budak, E.; Yüksel, E.; Park, S.; Altintas, Y. Review and status of tool tip frequency response function prediction using receptance coupling. Precis. Eng. 2023, 79, 60–77. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Natural Frequency (ω0) | Number of APs | Equivalent Mass (m0) | Equivalent Stiffness (k0) | Damping Ratio (ξ0) |
|---|---|---|---|---|
| 101.46 Hz | 1 | 1.97 Kg | 766,076.12 N/m | 0.05% |
| 121.96 Hz | 5 | 1.97 Kg | 1,115,701.89 N/m | 0.06% |
| k1 | c1 | |
|---|---|---|
| DVA1 | 22,461.12 N/m | 7.39 Ns/m |
| DVA2 | 32,712.04 N/m | 8.92 Ns/m |
| Stiffness (−5%) | Stiffness (+5%) | Damping (−5%) | Damping (+5%) | |
|---|---|---|---|---|
| AP1, maximum amplitude | 1.35 × 10−5 (78%) | 1.82 × 10−5 (70.78%) | 1.52 × 10−5 (75.73%) | 1.56 × 10−5 (75.1%) |
| AP1, maximum amplitude | 9.39 × 10−6 (78.25%) | 1.26 × 10−5 (70.77%) | 1.05 × 10−5 (75.72%) | 1.08 × 10−5 (75.05%) |
| Assessment Point | Freq. (Hz) | Max. Amplitude (×10−3 m/N) | Vibration Reduction | |
|---|---|---|---|---|
| Without DVA | With DVA | |||
| 1 | 101.1.46 | 4.93 | 1.22 | 75.3% |
| 2 | 2.99 | 0.64 | 78.5% | |
| 3 | 1.10 | 0.34 | 69.1% | |
| Assessment Point | Freq. (Hz) | Max. Amplitude (×10−3m/N) | Vibration Reduction | |
|---|---|---|---|---|
| Without DVA | With DVA | |||
| 4 | 121.96 | 1.17 | 0.27 | 76.7% |
| 5 | 1.29 | 0.45 | 65.1% | |
| 6 | 1.30 | 0.27 | 79.2% | |
| Assessment Point | Freq. (Hz) | Max. Amplitude (×10−3m/N) | Vibration Reduction | |
|---|---|---|---|---|
| Without DVA | With DVA | |||
| 1 | 101.5 | 4.93 | 0.71 | 85.68% |
| 2 | 2.99 | 0.49 | 83.51% | |
| 3 | 1.10 | 0.27 | 75.69% | |
| 4 | 120.0 | 1.17 | 0.22 | 81.01% |
| 5 | 1.29 | 0.33 | 74.23% | |
| 6 | 1.30 | 0.20 | 84.72% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, L.; Yang, Y.; Ma, W.; Wu, W. Design, Optimization, and Experimental Validation of Dynamic Vibration Absorber for Vibration Suppression in Cantilevered Plate Structures. Vibration 2025, 8, 40. https://doi.org/10.3390/vibration8030040
Ye L, Yang Y, Ma W, Wu W. Design, Optimization, and Experimental Validation of Dynamic Vibration Absorber for Vibration Suppression in Cantilevered Plate Structures. Vibration. 2025; 8(3):40. https://doi.org/10.3390/vibration8030040
Chicago/Turabian StyleYe, Linn, Yiqing Yang, Wenshuo Ma, and Wenjing Wu. 2025. "Design, Optimization, and Experimental Validation of Dynamic Vibration Absorber for Vibration Suppression in Cantilevered Plate Structures" Vibration 8, no. 3: 40. https://doi.org/10.3390/vibration8030040
APA StyleYe, L., Yang, Y., Ma, W., & Wu, W. (2025). Design, Optimization, and Experimental Validation of Dynamic Vibration Absorber for Vibration Suppression in Cantilevered Plate Structures. Vibration, 8(3), 40. https://doi.org/10.3390/vibration8030040