
Optimal and Quasi-Optimal Automatic Tuning of Vibration Neutralizers


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
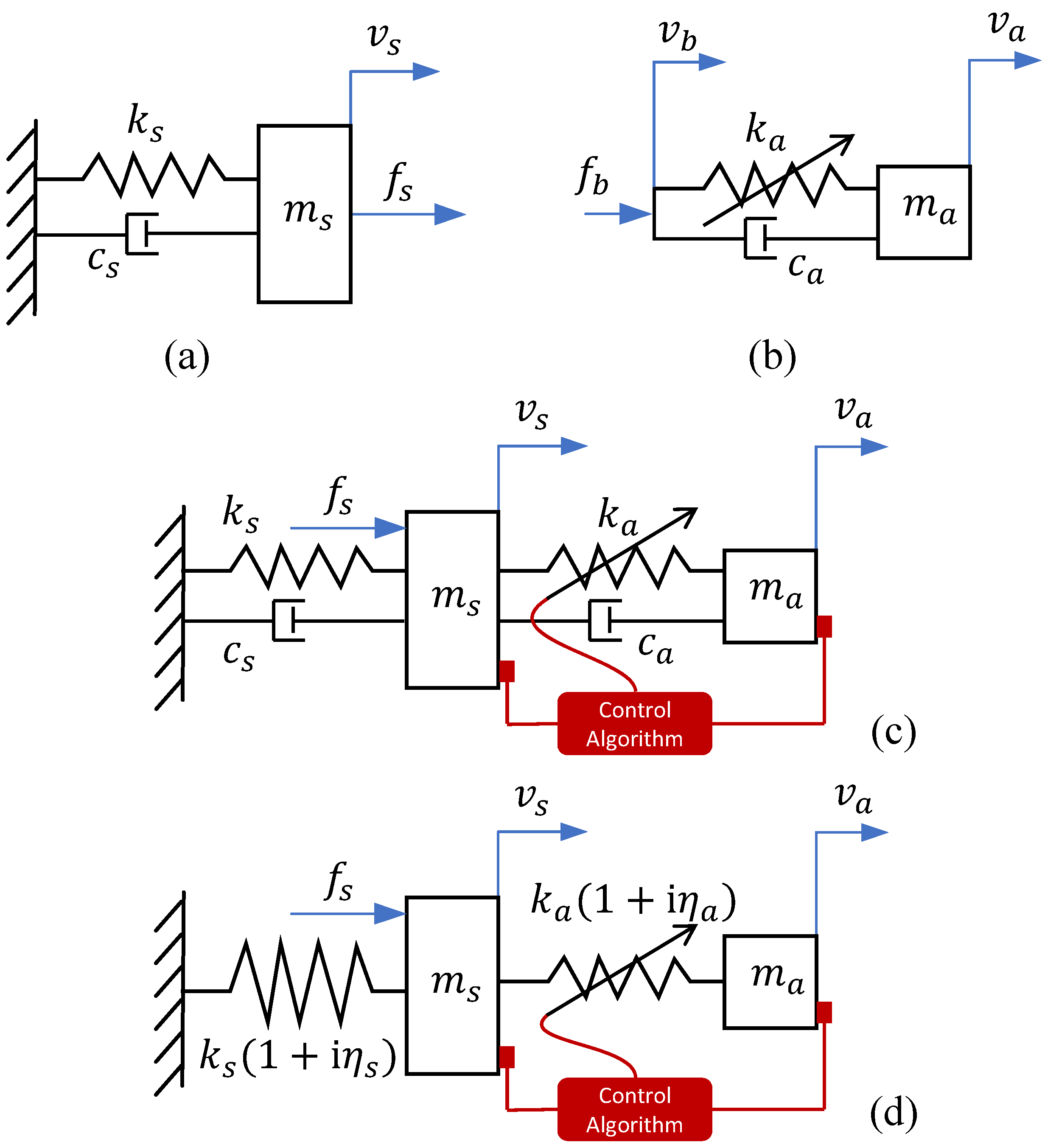
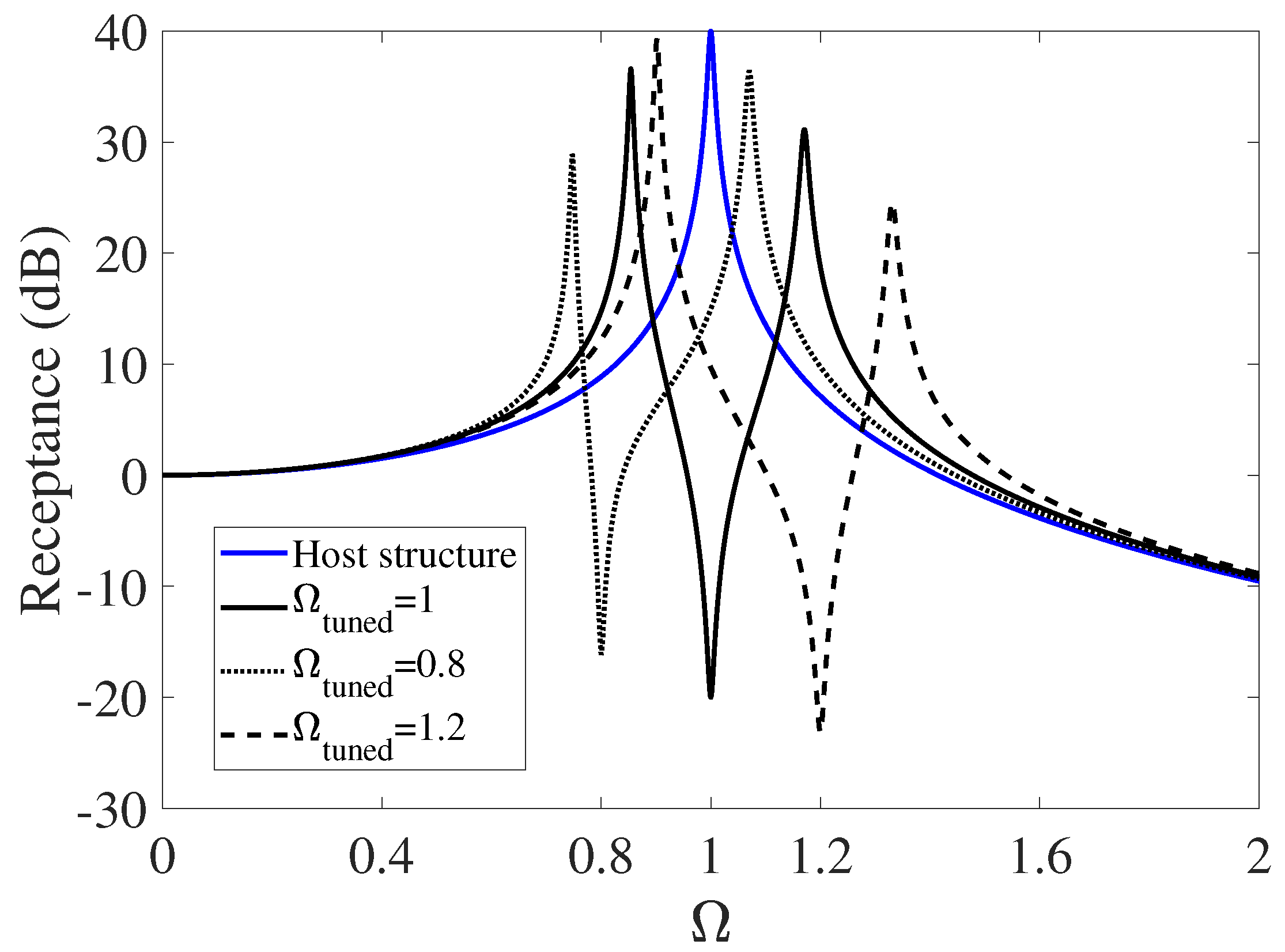
2. The Adaptive Tuned Vibration Neutralizer
3. Optimal and Approximated Tuning of the ATVN
3.1. Viscous Damping
3.2. Hysteretic Damping
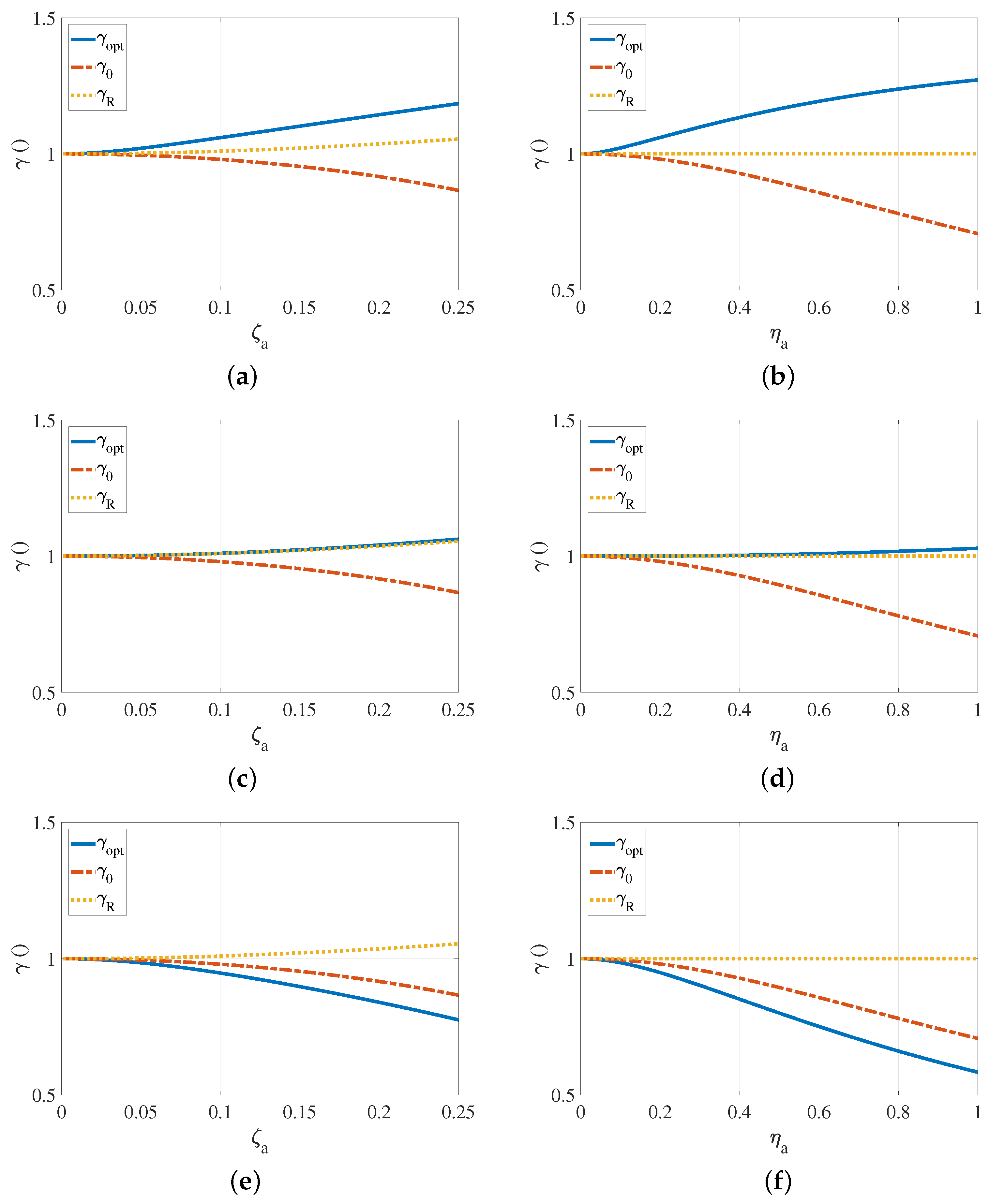
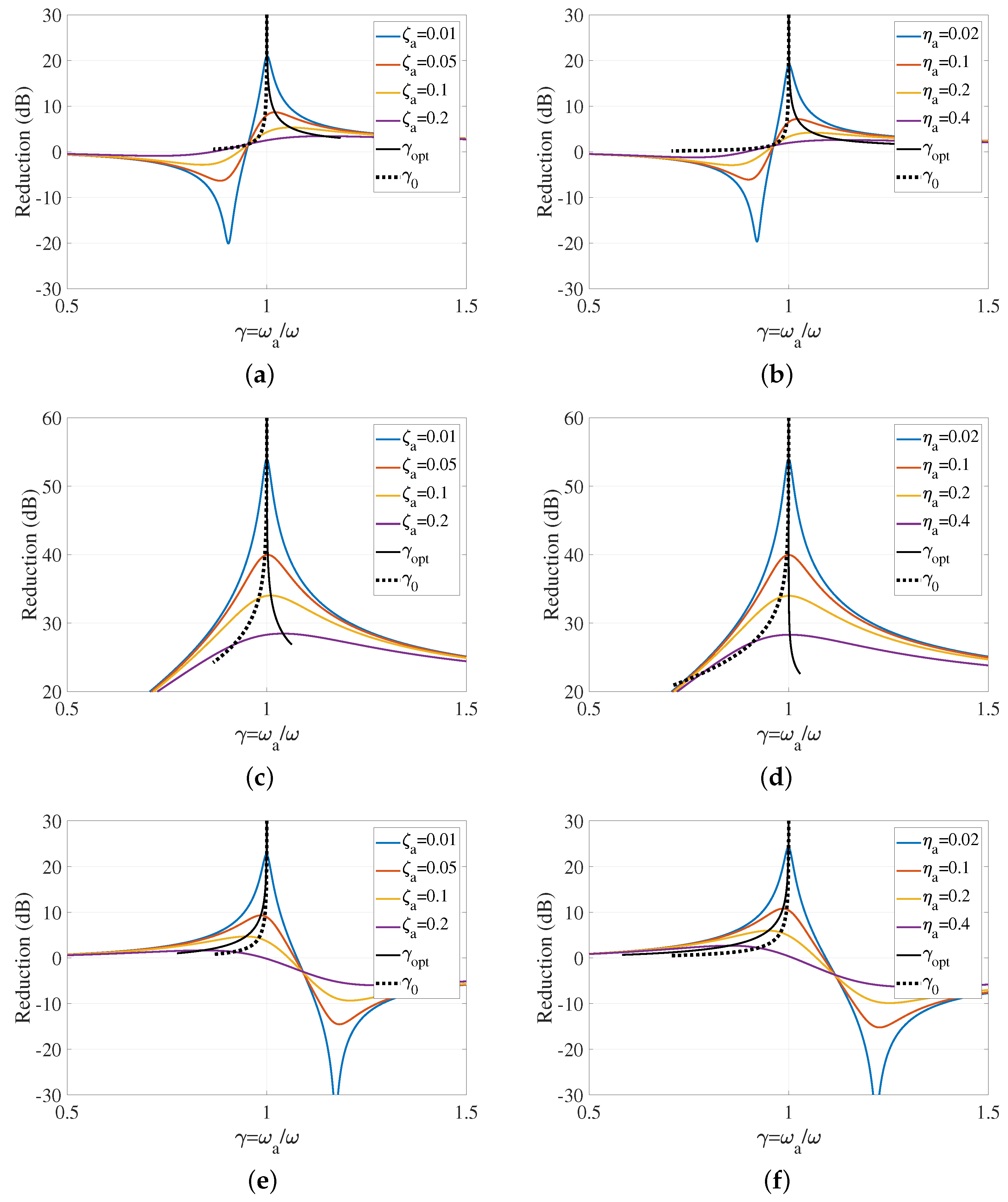
4. Quasi-Optimal Tuning of the ATVN
4.1. Viscous Damping
4.2. Structural Damping
5. Data Analysis and Discussion
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ATVN | Adaptive Tuned Vibration Neutralizer |
References
- Bonello, P. Adaptive tuned vibration absorbers: Design principles, concepts and physical implementation. In Vibration Analysis and Control; Beltran-Carbajal, F., Ed.; IntechOpen: Rijeka, Croatia, 2011. [Google Scholar] [CrossRef]
- Franchek, M.A.; Ryan, M.W.; Bernhard, R.J. Adaptive passive vibration control. J. Sound Vib. 1996, 189, 565–585. [Google Scholar] [CrossRef]
- Bonello, P.; Groves, K.H. Vibration control using a beam-like adaptive tuned vibration absorber with an actuator-incorporated mass element. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2009, 223, 1555–1567. [Google Scholar] [CrossRef]
- Kidner, M.R.F.; Brennan, M.J. Varying the Stiffness of a Beam-Like Neutralizer Under Fuzzy Logic Control. J. Vib. Acoust. 2001, 124, 90–99. [Google Scholar] [CrossRef]
- Walsh, P.L.; Lamancusa, J.S. A variable stiffness vibration absorber for minimization of transient vibrations. J. Sound Vib. 1992, 158, 195–211. [Google Scholar] [CrossRef]
- Rustighi, E.; Brennan, M.J.; Mace, B.R. A shape memory alloy adaptive tuned vibration absorber: Design and implementation. Smart Mater. Struct. 2004, 14, 19–28. [Google Scholar] [CrossRef]
- Williams, K.A.; Chiu, G.T.-C.; Bernhard, R.J. Dynamic modelling of a shape memory alloy adaptive tuned vibration absorber. J. Sound Vib. 2005, 280, 211–234. [Google Scholar] [CrossRef]
- Carneal, J.P.; Charette, F.; Fuller, C.R. Minimization of sound radiation from plates using adaptive tuned vibration absorbers. J. Sound Vib. 2004, 270, 781–792. [Google Scholar] [CrossRef]
- Bonello, P.; Brennan, M.J.; Elliott, S.J. Vibration control using an adaptive tuned vibration absorber with a variable curvature stiffness element. Smart Mater. Struct. 2005, 14, 1055–1065. [Google Scholar] [CrossRef]
- Brennan, M.J.; Bonello, P.; Rustighi, E.; Mace, B.R.; Elliott, S.J. Designs of a variable stiffness element for a tunable vibration absorber. In Proceedings of the ICA2004 (The 18th International Congress on Acoustics), Kyoto, Japan, 4–9 April 2004; Volume IV, pp. 2915–2918. [Google Scholar]
- Fosdick, R.; Ketema, Y. A thermoviscoelastic dynamic vibration absorber. J. Appl. Mech. 1998, 65, 17–24. [Google Scholar] [CrossRef]
- Rustighi, E.; Beaugrand, M. A viscoelastic adaptive tuned vibration absorber. In Proceedings of the MoViC2014: The 12th International Conference on Motion and Vibration, Sapporo, Japan, 3–7 August 2014; p. 10069. [Google Scholar]
- Wang, Y.; Li, L.; Hofmann, D.; Andrade, J.E.; Daraio, C. Structured fabrics with tunable mechanical properties. Nature 2021, 596, 238–243. [Google Scholar] [CrossRef] [PubMed]
- Rustighi, E.; Gardonio, P.; Cignolini, N.; Baldini, S.; Malacarne, C.; Perini, M. Vibration response of tuneable structured fabrics. In Proceedings of the ISMA2022 Including USD2022, Leuven, Belgium, 12–14 September 2022; pp. 2429–2439. [Google Scholar]
- Davis, C.L.; Lesieutre, G.A. An Actively Tuned Solid-State Vibration Absorber Using Capacitive Shunting of Piezoelectric Stiffness. J. Sound Vib. 2000, 232, 601–617. [Google Scholar] [CrossRef]
- Morgan, R.A.; Wang, K.W. Active-Passive Piezoelectric Absorbers for Systems Under Multiple Non-Stationary Harmonic Excitations. J. Sound Vib. 2002, 255, 685–700. [Google Scholar] [CrossRef]
- Rustighi, E.; Brennan, M.J.; Mace, B.R. Real-time control of a shape memory alloy adaptive tuned vibration absorber. Smart Mater. Struct. 2005, 14, 1184–1195. [Google Scholar] [CrossRef]
- Williams, K.A.; Chiu, G.T.-C.; Bernhard, R.J. Nonlinear control of a shape memory alloy adaptive tuned vibration absorber. J. Sound Vib. 2005, 288, 1131–1155. [Google Scholar] [CrossRef]
- Brennan, M.J. Vibration control using a tunable vibration neutralizer. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 1997, 211, 91–108. [Google Scholar] [CrossRef]
- Den Hartog, J.P. Mechanical Vibrations, 4th ed.; McGraw-Hill: New York, NY, USA, 1956. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rustighi, E. Optimal and Quasi-Optimal Automatic Tuning of Vibration Neutralizers. Vibration 2024, 7, 362-373. https://doi.org/10.3390/vibration7020018
Rustighi E. Optimal and Quasi-Optimal Automatic Tuning of Vibration Neutralizers. Vibration. 2024; 7(2):362-373. https://doi.org/10.3390/vibration7020018
Chicago/Turabian StyleRustighi, Emiliano. 2024. "Optimal and Quasi-Optimal Automatic Tuning of Vibration Neutralizers" Vibration 7, no. 2: 362-373. https://doi.org/10.3390/vibration7020018
APA StyleRustighi, E. (2024). Optimal and Quasi-Optimal Automatic Tuning of Vibration Neutralizers. Vibration, 7(2), 362-373. https://doi.org/10.3390/vibration7020018