2.1. Coupled Waveguide System in Absence of Defects
We consider a system composed of three coupled elastic waveguides taking the form of one-dimensional mass-spring chains (
Figure 1).
The chain and coupling springs obey linear elasticity. The discrete linear elastic equations of motion are given by:
In Equations (1)–(3),
and
are the displacements of
mass of top, middle, and lower chains, respectively.
is the mass, and the viscous damping coefficient
models the dissipation. Here we take the coupling constant between chains,
, to be the same for all coupled chains. We seek solutions in the form of plane waves,
, with the amplitude vector
. Inserting this ansatz into Equations (1)–(3), we obtain the eigen value problem:
where
,
is the 3
3 identity matrix and the coupling matrix
takes the form
. The eigen vectors of the coupling matrix are spatial eigen mode isomorphic to orbital angular momenta (OAM) [
14]. The three normalized OAM eigen vectors corresponding to the eigen values
,
, and
, are:
Replacing
in Equation (4) by these eigen vectors, gives the associated dispersion relations for plane wave solutions,
The coupled elastic system is then driven externally with the external force applied at .
The equations of motion of the driven coupled system become:
The
is the Kronecker delta and ensures the location of the driver. We expand the driving force over the OAM basis:
where
for
.
We seek solutions of Equations (8)–(10) in the form of plane waves that try to follow the driving frequency:
with the amplitude vector expanded in the OAM basis,
. By inserting this ansatz and Equation (11) into Equations (9) and (10) and by using the undriven dispersion relations given by Equations (5)–(7), we obtain:
For . These amplitudes are complex quantities because of the dissipation term.
Equations (8)–(10) relate to infinite chains, however, in the case of more realistic finite length spring-mass chains, one deals with a finite set of modes labeled by a discrete set of wavenumbers. The general form of the displacement field will take the form:
where the sums are over the discrete wavevectors,
, , , associated with the modes of the finite length system.
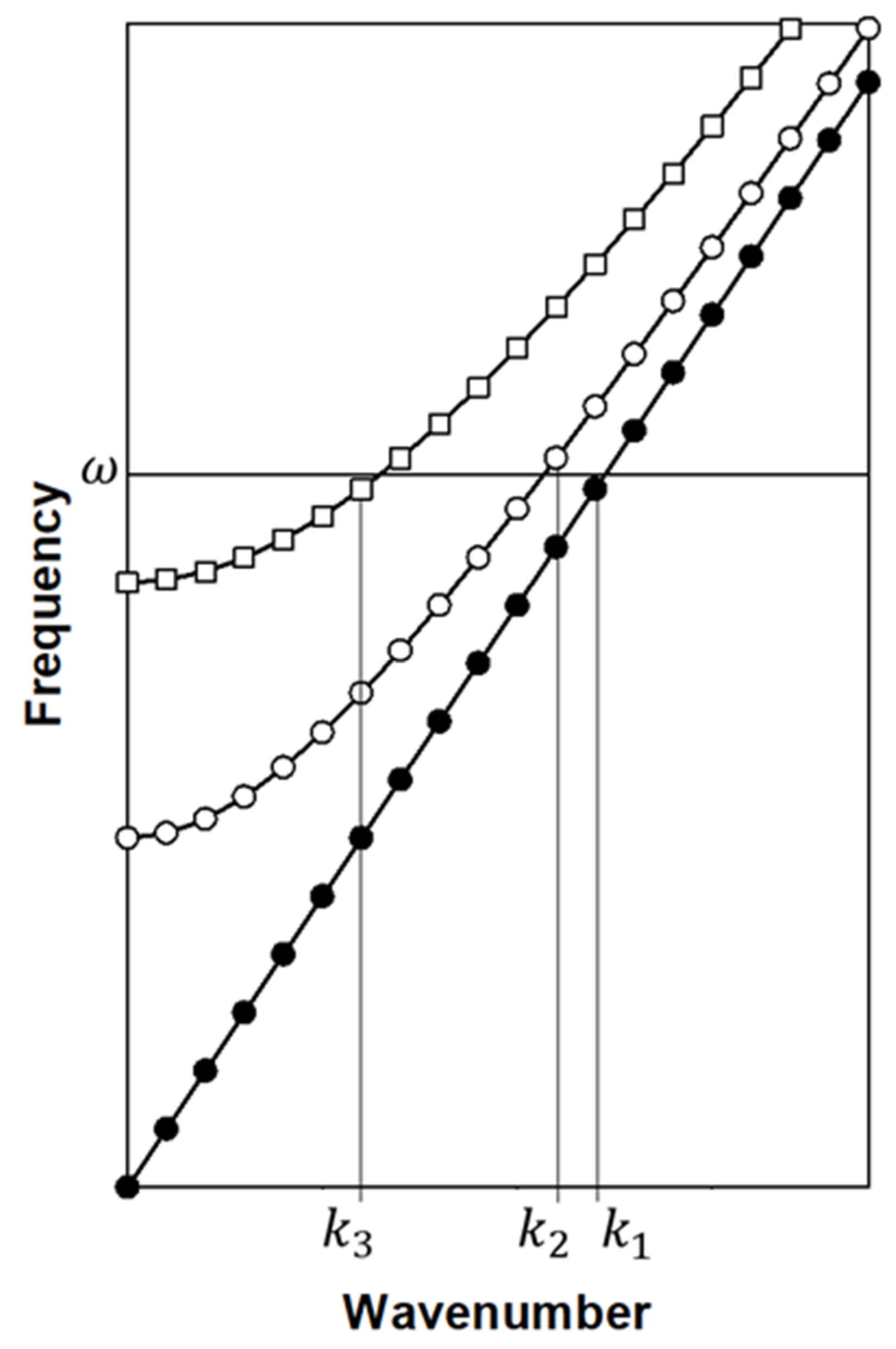
In light of the Lorentzian line shape of the amplitudes
, it is possible to conceive the use of isofrequency drivers which minimize the amplitude of some modes and maximize others (
Figure 2). This approach will reduce the number of wavenumbers that will contribute significantly to a driven displacement field which defines the values of
,
,
, uniquely. We note that by manipulating the driving frequencies and driving amplitudes we can choose any of the possible combination of
values and OAMs. It is therefore possible to create a driven displacement field that includes only one wave number for each OAM:
In Equation (14) we us the position variable . Furthermore, by exploiting the orthogonality of the OAM basis vectors, one would also be able to employ a driving force which is only a linear combination of and . In that case and will have only negligible magnitude, thus reducing the number of terms in Equation (14) from three to two. This approach can also be used to reduce Equation (14) to pure states with one single OAM.
We now envision the Hilbert space of elastic waves that are products of the three OAM eigen vectors and three corresponding plane wave terms. The basis for this 3
2 dimensional space are
,
,
,
,
,
,
,
, . The superposition of waves represented by Equation (14) is a unique vector in this complex Hilbert space,
, with complex components,
, that are phase locked as these amplitudes are generated by the same driving force. The angle this vector makes with some reference vector in this space is the geometric phase of the superposition. This state is also representative of a nonseparable state and cannot be written as a product of a linear combination of OAM vectors and a linear combination of the three plane waves. Such states have been demonstrated experimentally [
4].
One of the key properties of acoustic waves of the form given by Equation (14) for topological acoustic sensing is coherence. By coherence, we mean that the complex amplitudes, , and are not independent of each other. A perturbation such as a scatterer will modify all three amplitudes simultaneously. This property is analyzed in next subsection.
2.2. Coupled Waveguide System with Mass Defects
The defected three-waveguide system is illustrated in
Figure 3.
The equations of motion of this defected system are the same as Equations 1–3 everywhere along the waveguides but at the location of the defects. The location of the defect is taken as
. Considering harmonic waves with angular frequency,
, the equations of motion at the defect location read:
In Equations (15)–(17), we have omitted the dissipative term for the sake of clarity and simplicity. We will do the same for the equations of motion in the nondefected region of the system. To account for dissipation, one may replace terms of the form and by and .
We now address the scattering of plane waves with the three different OAM eigen vectors.
2.3. Scattering of an Mode
We consider an incident wave that is scattered by the defects into a reflected wave and a transmitted wave. The incident and reflected waves live on the same side of the system with respect to the defects e.g., left side. The transmitted wave is located on the opposite side of the defect as well as at the defect location.
At
, the ansatz we choose for the incident and scattered waves are:
Note that at the defect site the vector
differs from
because of the difference in the masses
and
. Note also that the reflected wave in Equation (18) propagates in a direction opposite to that of the incident wave. The quantities
,
and
are the amplitudes of the incident, reflected and transmitted waves. We have the conservation of amplitude constraint
. For simplicity, assuming no local resonances, we normalize these amplitudes to that of the incident wave such that the constraint reduces to
where
and
.
and
are therefore the sought reflection and transmission coefficients. Similarly, we express the ansatz of Equations (18)–(20) in terms of
and
by normalizing them with respect to
. Inserting the normalized Equations (18)–(20) into Equations (15)–(17) and using Equation (21), we obtain four equations for the four unknowns:
,
,
and
.
After extensive algebraic manipulations, we obtain the solution:
In the limit of , , , and , that is there is no scattering.
In obtaining Equations (22)–(25), we have made use of the dispersion relation given by Equation (5). The reflection coefficient, , is complex. If we account for dissipation, the coefficients and are also complex quantities and affect the phase of the reflection coefficient. Therefore carries a phase that is a complicated function of the wave number, angular frequency, and physical parameters of the systems including the mass of the defect.
2.6. Scattering of a Nonseparable Superposition of States
If we considered an incident wave that is generated by driving the system such that the displacement field is given by Equation (14), the transmitted wave will be a superposition of states of the form:
The frequency, , in Equation (40) is that of the external driver.
Since the coefficients
and
are complex quantities and carry amplitude and phase, they act on the incident wave (Equation (14)), by rotating its corresponding state vector in the complex space H. The rotation depends on the scattering masses through the coefficients,
and
. Writing
for
, we find
. Writing the transmission coefficients,
, the displacement field (Equation (40)) at some location,
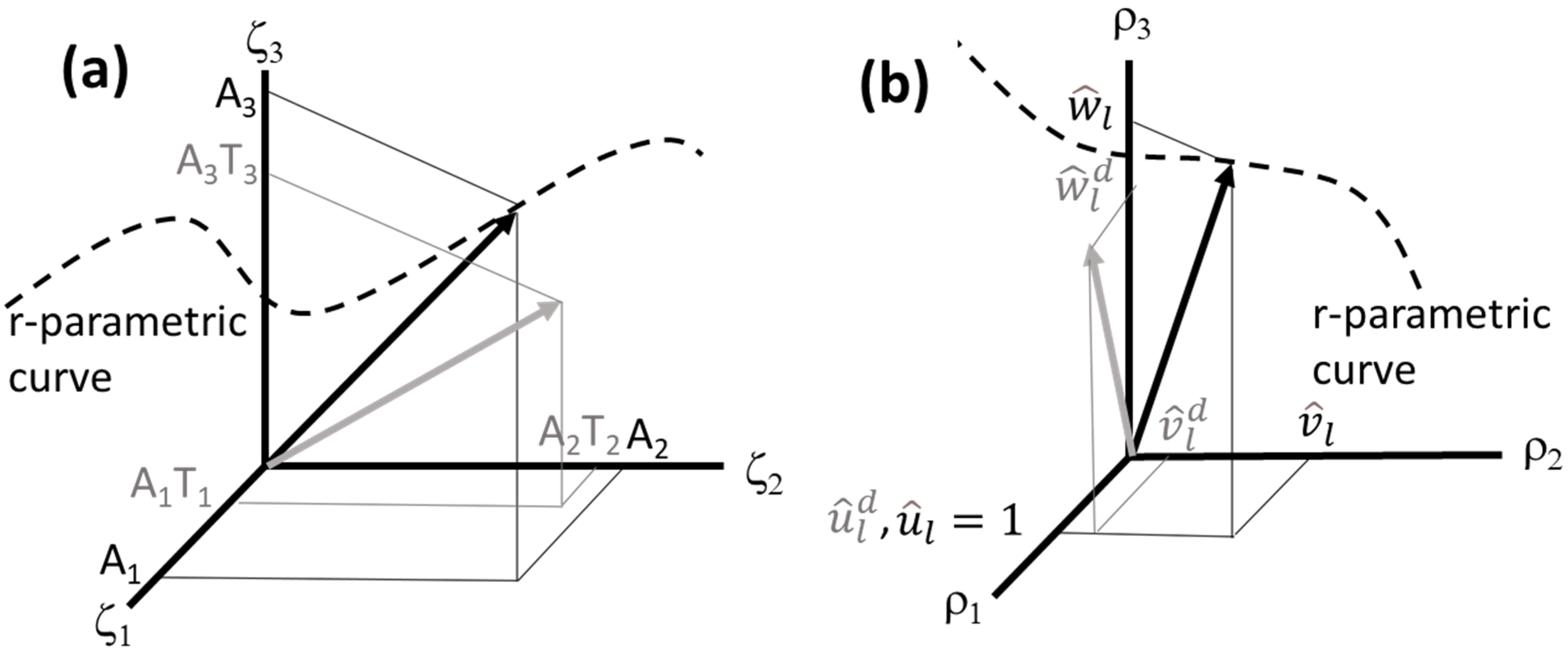
can be rewritten as:
or effectively:
Equations (40) and (42) are two different representations of the same transmitted displacement. The first representation is in the complex Hilbert space,
, or equivalently in the Hilbert subspace,
, which basis vectors are
,
and
. The second representation is in the space,
, with the basis
,
and
corresponding to the first, second and third rods, respectively. We can reduce this second representation by normalizing all components in Equation (42) to that of the first rod, namely
It is therefore possible to measure the rotation induced by the scatterers by measuring the relative phase of the displacement field between the first and the second waveguides and the first and third waveguides at l, namely and . In this representation, the displacement of the first waveguide serves as reference.
We note that the superposition of state given by Equation (41) can only be made separable if two of these amplitudes , , are identically zero, that is, if the external driving force is chosen such that two of the , are zero in Equation (11). The only separable states are therefore the pure , , or modes. For the three pure modes, the transmitted waves are simply multiplied by the transmission coefficients , , and , respectively. Each of these complex transmission coefficients will add a general phase to the pure modes which cannot be detected in an experiment by measuring the relative phase between rods. In contrast, a nonseparable coherent superposition of states such as that of Equation (40) will lead to a measurable change in relative phase between rods as a result of scattering. In this latter case, one exploits the coherence of the superposition of states.
In the next section, we implement an experiment to quantify the sensitivity of the geometric phase of nonseparable superpositions of waves to mass scatterers, i.e., explore the effect of mass scatterers on Equation (43).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}