
Reconstruction of the Vertical Dynamic Running Load from the Registered Body Motion


Abstract
:1. Introduction
- Human–Human Interaction (HHI): When individuals walk or run in small/large groups or large crowds, their locomotion is influenced by that of neighboring individuals [18,19,20]. For walking excitation, this is known to influence the synchronization rate [21]. Design guides therefore specify a distribution of step frequencies as a function of the pedestrian density [16,17]. Because the vibration serviceability assessment is in nearly all cases conducted under resonant conditions, the synchronization rate among individuals has a normative influence on the structural design.
- Human–Structure Interaction (HSI): This phenomenon involves the so-called (1) active HSI where the locomotion is influenced by the motion of the supporting surface (footbridge) and (2) passive HSI that involves the mechanical interaction between the human body and the supporting structure. For walking excitation, active HSI phenomena have been shown to considerably influence the level of synchronization rate as well as the load amplitudes, which are two features that have a significant impact on the resulting structural response [3,5,22]. In addition, passive HSI has been shown to be normative for the VSA design, in particular for larger groups and crowds, where the dominant effect is added damping [23,24,25].
2. Reconstruction Methodology
2.1. Newton’s Second Law
2.2. Using the Time-Variant Pacing Rate and a Generalized Load Model
2.2.1. Identification of the Time-Variant Pacing Rate
- The data are resampled at 1000 Hz: Given the accuracy that is aimed for when identifying the time-variant pacing rate (), it is recommended to use a resolution in the time domain of 0.001 s. For the running cycle, this resolution corresponds to 0.3% of the smallest period that reasonably can be expected, i.e., corresponding to a pacing rate of 3.5 Hz;
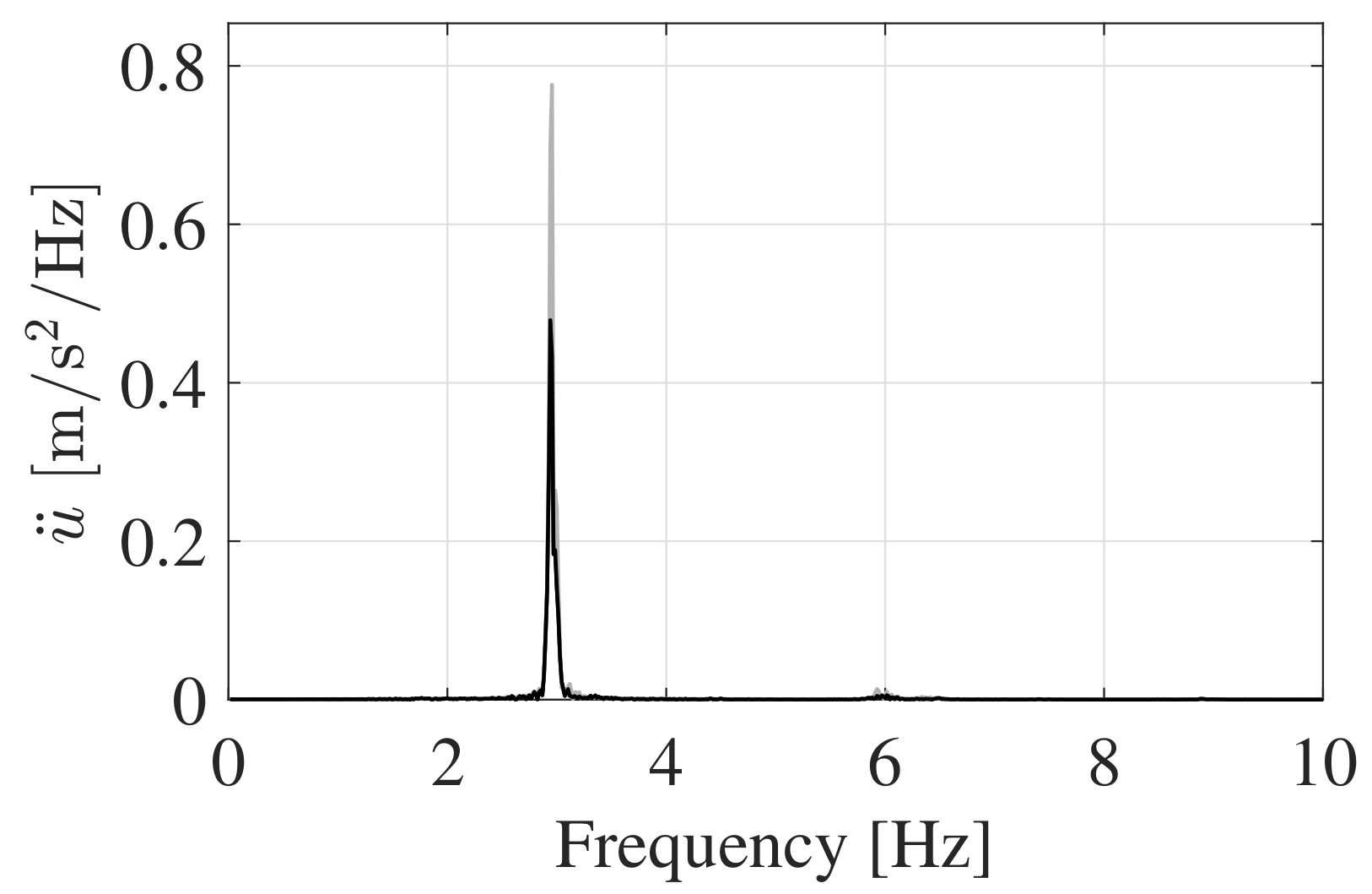
- The PSD of the registered body motion is calculated with a frequency resolution of at least 0.05 Hz. The mean pacing rate is identified as the dominant contribution of the PSD in the relevant frequency range: 2.0–3.5 Hz.
- The data are low-pass filtered with a cut-off frequency at .
2.2.2. Running Load Models
- Heel-strike running: characterized by an impact peak (a first small peak) and a propulsive peak (a second big peak, also known as the active peak when the body center of mass moves over the foot);
- Forefoot-strike running: only one active peak occurs;
- Midfoot-strike running: similar to forefoot-strike running with only a slight disturbance near the position of the impact peak.
2.2.3. Reconstruction
2.3. Evaluation Methodology
3. Experimental Validation
3.1. Laboratory Experiments
3.2. Reconstruction of the Running Load
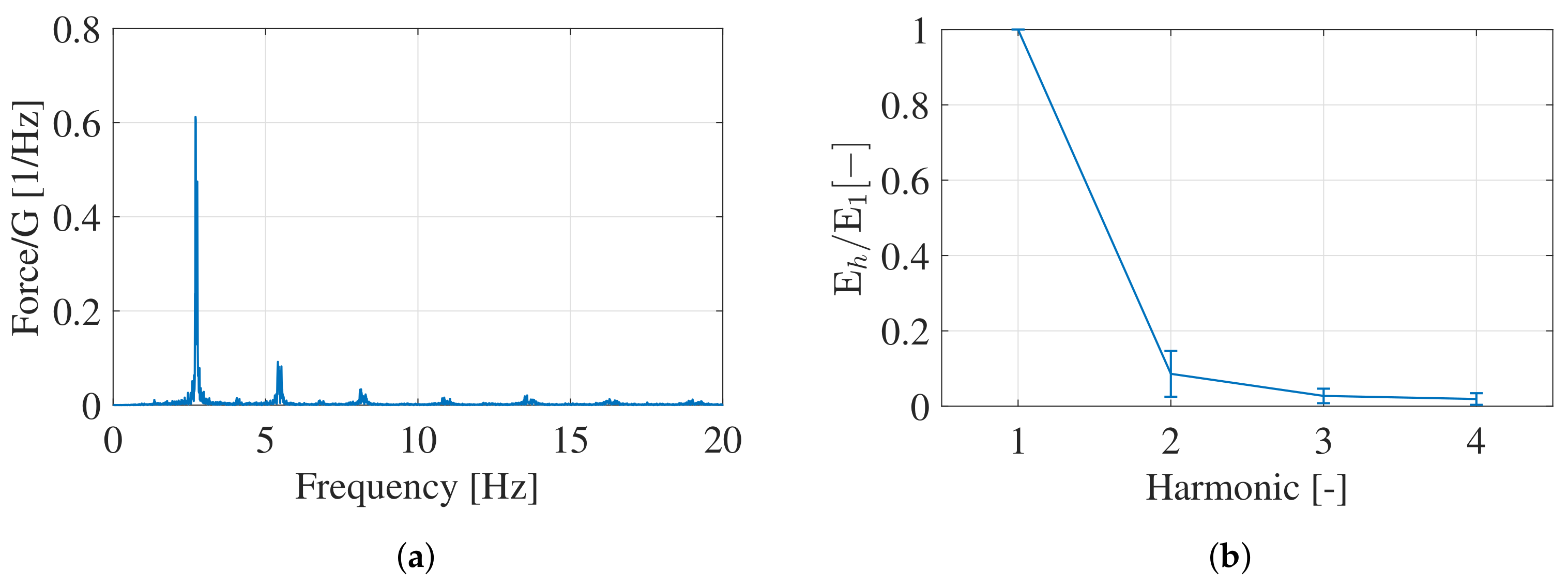
3.2.1. Energy Per Harmonic
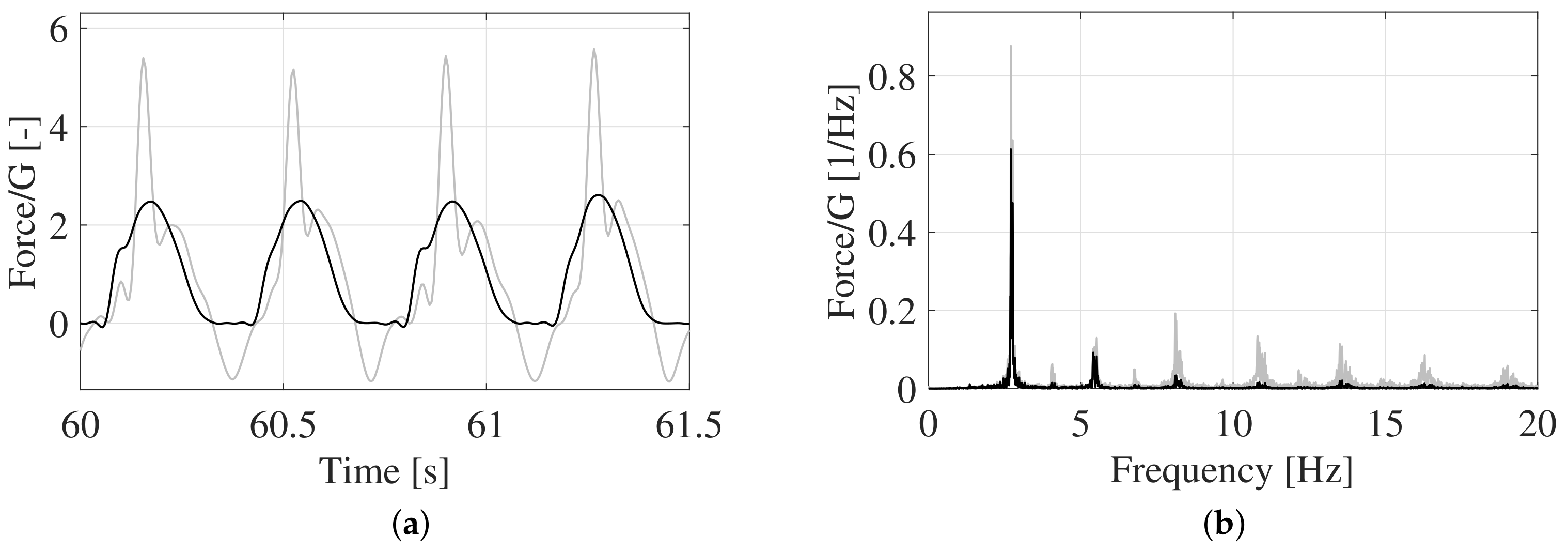
3.2.2. Averaged Single-Step Load Pattern
3.2.3. Performance of the Reconstruction Methods
- Model ref: The errors introduced by disregarding the step-by-step variations in the single-step load pattern or by small errors in the identified time-variant pacing rate are negligible in terms of , and . The small reconstruction errors () observed for the higher harmonics increase with the number of the harmonic, with an average of 11% (), 22% () and 26% ().
- The performance of Models 1 and 2 is comparable: As a result of using a generalized single-step load pattern, the errors marginally increase in terms of , , and . decreases from an average value of 89% (model ref) to 81% (model 1) and 77% (model 2). decreases from an average value of 74% (model ref) to 43% (model 1) and 42% (model 2).
- When applying the single-step load pattern in Model 3, the reconstruction error in terms of and increases by approximately 5% in comparison to the performance of Models 1 and 2. The reconstruction errors () on the fundamental, second and third harmonic are considerably larger, with an average of 18% (), 46% () and 51% (). This indicates that the forefoot-strike load pattern is less representative for the collected dataset.
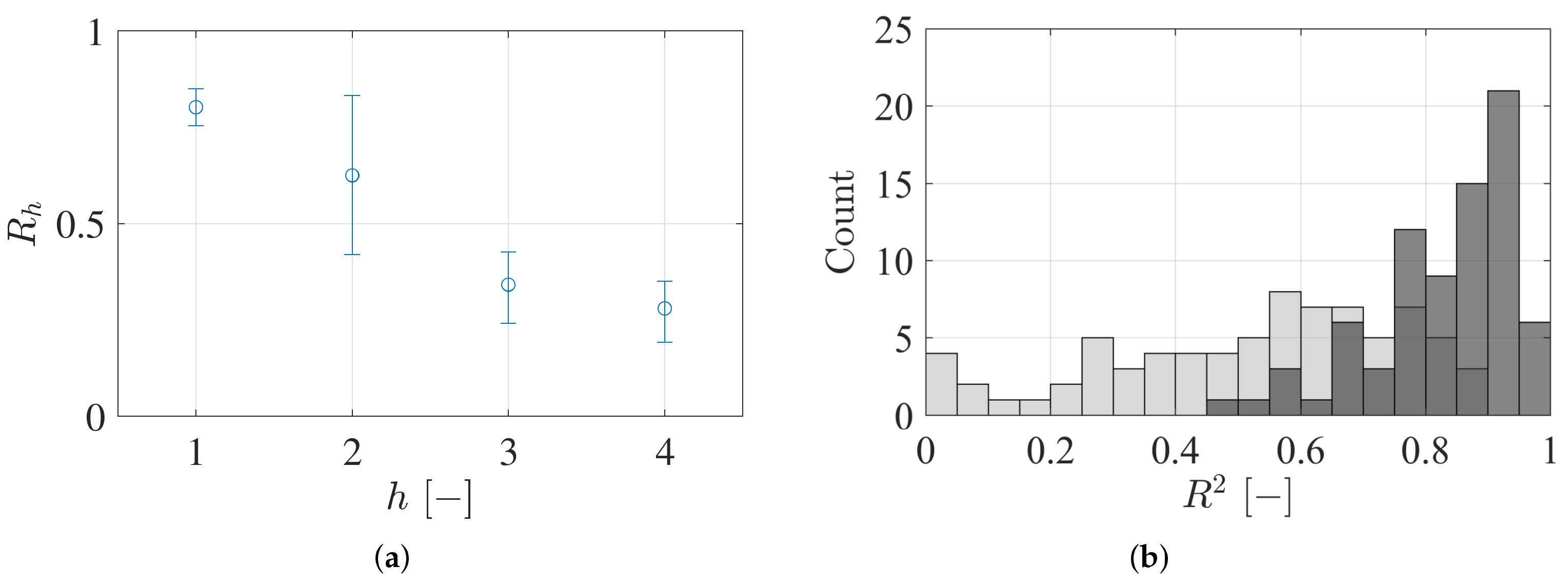
- The reconstruction method discussed in Section 2.2 considerably outperforms the reconstruction method using Newton’s second law, even when a generalized single-step load pattern is used (Model 1 or 2): Considering : = 95% vs. 52%, = 98% vs. 83%, = 101% vs. 80%, = 81% vs. 63%, = 112% vs. 34% and = 43% vs. 28%. This observation is also visually obvious when the corresponding histograms of the coefficients of determination are compared, e.g., by comparing Figure 5 and Figure 9.
3.3. Full-Scale Tests
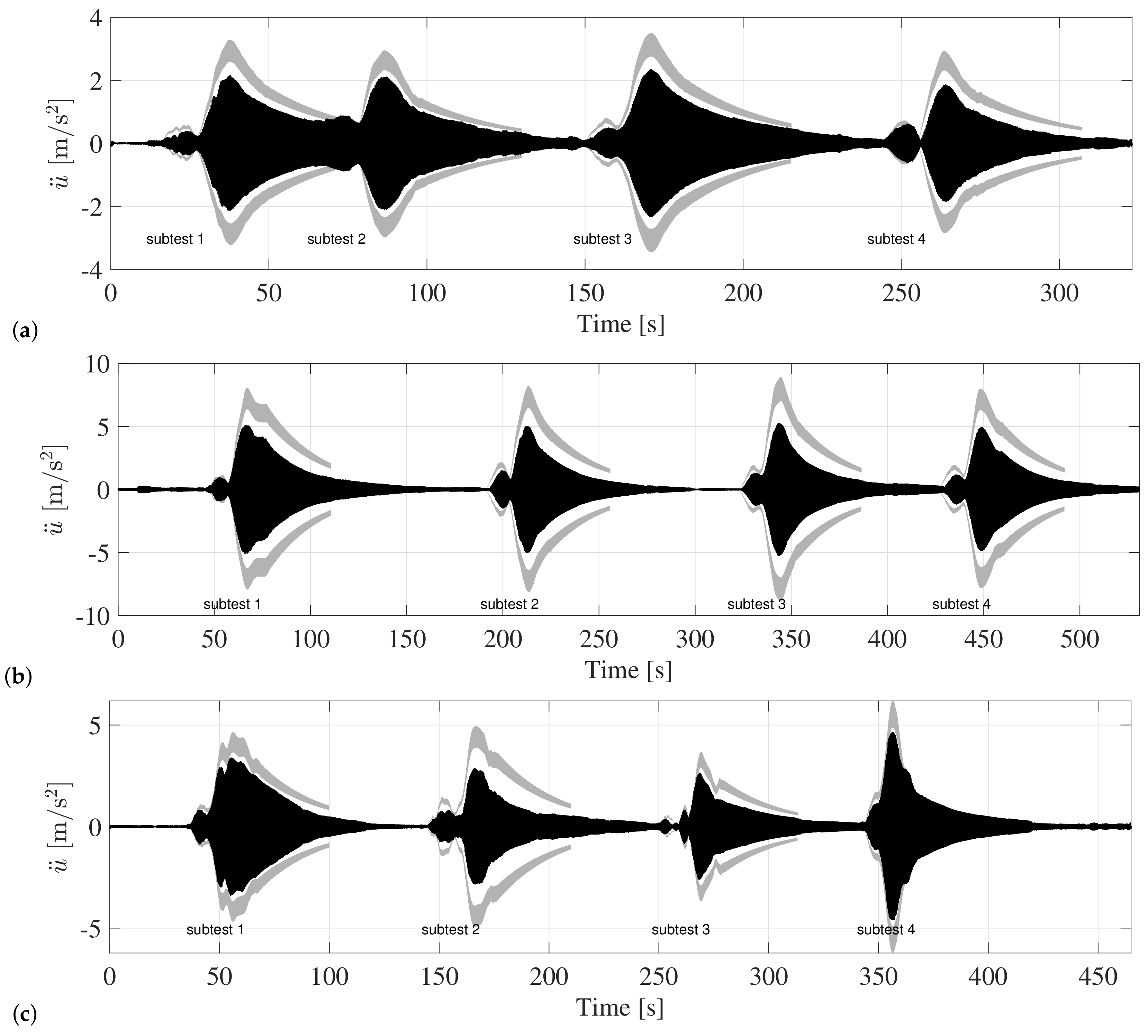
- The structural response is highly similar for the four subtests in tests 1 and 2. This illustrates that the subtests are representative for the involved load case. More variation is observed among the subtests of test 3. This is due to the fact that for test 3, no metronome was used to tune the pacing rates: the individually self-selected running speeds are associated with a large degree of inter- and intra-person variability in terms of pacing rate. This is also illustrated by the distribution of pacing rates in tests 1, 2 and 3, as presented in Figure 14.
- Although the correlation between the simulations and the measurements is very high, in terms of amplitude, the simulations consistently overestimate the measured structural response, even when the lower bound of the simulations is considered. Considering (), tests 1, 2 and 3, respectively, overestimate the structural response by 35% (19%), 47% (30%) and 31% (16%). When comparing test 1 and test 2, the degree to which the structural response is overestimated increases with the number of involved participants and/or with the increasing structural response. At first sight, this observation does not apply when test 1 (involving one participant) and 2 (involving three participants) are compared with test 3 (involving seven participants) where the highest number of participants is involved. The structural vibration levels are in this case comparable to these observed for test 2, yet the degree of overestimation is comparable to that observed for test 1. However, for test 3, no metronome signal was used to target resonance with mode 2, and this test type is therefore characterized by a different (and less resonant) distribution of pacing rates (see also Figure 14). In contrast, the distribution of pacing rates observed for test 1 and 2 is highly similar (as expected). These distributions explain why the structural response for test 3 is not higher than that of test 2. Furthermore, it is also expected that as a lower number of participants is running synchronized with the structural response, also the impact of HSI will be less, and in any sense, different from the impact observed in tests 1 and 2.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BCoM | Body center of mass |
| GRFs | Ground reaction forces |
| HHI | Human–human interaction |
| HSI | Human–structure interaction |
| PSD | Power spectral density |
| TMD | Tuned mass damper |
References
- Živanović, S.; Pavić, A.; Reynolds, P. Vibration serviceability of footbridges under human-induced excitation: A literature review. J. Sound Vib. 2005, 279, 1–74. [Google Scholar] [CrossRef]
- Tubino, F.; Piccardo, G. Serviceability assessment of footbridges in unrestricted pedestrian traffic conditions. Struct. Infrastruct. Eng. 2016, 12, 1650–1660. [Google Scholar] [CrossRef]
- Venuti, F.; Bruno, L. Crowd-structure interaction in lively footbridges under synchronous lateral excitation: A literature review. Phys. Life Rev. 2009, 6, 176–206. [Google Scholar] [CrossRef] [PubMed]
- Racić, V.; Pavić, A.; Reynolds, P. Experimental identification and analytical modelling of walking forces: A literature review. J. Sound Vib. 2009, 326, 1–49. [Google Scholar] [CrossRef]
- Ingólfsson, E.T.; Georgakis, C.T.; Jönsson, J. Pedestrian-induced lateral vibrations of footbridges: A literature review. Eng. Struct. 2012, 45, 21–52. [Google Scholar] [CrossRef]
- Shahabpoor, E.; Pavić, A.; Racić, V. Interaction between Walking Humans and Structures in Vertical Direction: A Literature Review. Shock Vib. 2016, 2016, 3430285. [Google Scholar] [CrossRef]
- Wheeler, J. Prediction and control of pedestrian-induced vibration in footbridges. J. Struct. Div. ASCE 1982, 108, 2045–2065. [Google Scholar] [CrossRef]
- Bachmann, H.; Ammann, W. Vibrations in Structures Induced by Man and Machines; IABSE-AIPC-IVBH: Zürich, Switzerland, 1987. [Google Scholar]
- Occhiuzzi, A.; Spizzuoco, M.; Ricciardelli, F. Loading models and response control of footbridges excited by running pedestrians. Struct. Control Health Monit. 2008, 15, 349–368. [Google Scholar] [CrossRef]
- Racić, V.; Morin, J. Data-driven modelling of vertical dynamic excitation of bridges induced by people running. Mech. Syst. Signal Process. 2014, 43, 153–170. [Google Scholar] [CrossRef]
- Pańtak, M. Vertical dynamic loads on footbridges generated by people running. Balt. J. Road Bridge Eng. 2020, 15, 47–75. [Google Scholar] [CrossRef]
- Pańtak, M. Ground reaction forces generated by runners-harmonic analyses and modelling. Appl. Sci. 2020, 10, 1575. [Google Scholar] [CrossRef]
- Gurchiek, R.D.; McGinnis, R.S.; Needle, A.R.; McBride, J.M.; van Werkhoven, H. The use of a single inertial sensor to estimate 3-dimensional ground reaction force during accelerative running tasks. J. Biomech. 2017, 61, 263–268. [Google Scholar] [CrossRef]
- Jenny, D.F.; Jenny, P. On the mechanical power output required for human running—Insight from an analytical model. J. Biomech. 2020, 110, 109948. [Google Scholar] [CrossRef]
- Reenalda, J.; Zandbergen, M.A.; Harbers, J.H.; Paquette, M.R.; Milner, C.E. Detection of foot contact in treadmill running with inertial and optical measurement systems. J. Biomech. 2021, 121, 110419. [Google Scholar] [CrossRef]
- Association Française de Génie Civil, Sétra/AFGC. Sétra: Evaluation du Comportement Vibratoire des Passerelles Piétonnes Sous L’action des Piétons (Assessment of Vibrational Behaviour of Footbridges under Pedestrian Loading); AFGC: Paris, France, 2006. [Google Scholar]
- Butz, C.; Feldmann, M.; Heinemeyer, C.; Sedlacek, G. SYNPEX: Advanced Load Models for Synchronous Pedestrian Excitation and Optimised Design Guidelines for Steel Footbridges; Technical Report, Research Fund for Coal and Steel; Office for Official Publications of the European Communities: Luxembourg, 2008. [Google Scholar]
- Helbing, D.; Molnar, P. Social force model for pedestrian dynamics. Phys. Rev. 1995, 51, 4282–4286. [Google Scholar] [CrossRef]
- Seyfried, A.; Steffen, B.; Klingsch, W.; Boltes, M. The fundamental diagram of pedestrian movement revisited. J. Stat. Mech. Theory Exp. 2005, 2005, P10002. [Google Scholar] [CrossRef]
- Venuti, F.; Bruno, L.; Bellomo, N. Crowd dynamics on a moving platform: Mathematical modelling and application to lively footbridges. Math. Comput. Model. 2007, 2, 252–269. [Google Scholar] [CrossRef]
- Ferrarotti, A.; Tubino, F. Generalized equivalent spectral model for vibration serviceability analysis for footbridges. J. Bridge Eng. 2016, 21, 04016091. [Google Scholar] [CrossRef]
- Fujino, Y.; Siringoringo, D. A Conceptual Review of Pedestrian-Induced Lateral Vibration and Crowd Synchronization Problem on Footbridges. J. Bridge Eng. 2015, 21, C4015001. [Google Scholar] [CrossRef]
- Ahmadi, E.; Caprani, C.; Zivanovic, S.; Evans, N.; Heidarpour, A. A framework for quantification of human-structure interaction in vertical direction. J. Sound Vib. 2018, 432, 351–372. [Google Scholar] [CrossRef]
- Shahabpoor, E.; Pavić, A.; Racić, V. Structural vibration serviceability: New design framework featuring human-structure interaction. Eng. Struct. 2017, 136, 295–311. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Pavic, A.; Van den Broeck, P. A simplified method to account for vertical human-structure interaction. Structures 2021, 32, 2004–2019. [Google Scholar] [CrossRef]
- McDonald, M.; Živanović, S. Measuring ground reaction force and quantifying variability in jumping and bobbing actions. J. Struct. Eng. 2017, 143, 04016161. [Google Scholar] [CrossRef]
- Dang, H.; Živanović, S. Influence of Low-Frequency Vertical Vibration on Walking Locomotion. J. Struct. Eng. 2016, 142, 04016120. [Google Scholar] [CrossRef]
- Racić, V.; Brownjohn, J.M.W.; Pavić, A. Reproduction and application of human bouncing and jumping forces from visual marker data. J. Sound Vib. 2010, 329, 3397–3416. [Google Scholar] [CrossRef]
- Carroll, S.P.; Owen, J.S.; Hussein, M.F.M. Reproduction of lateral ground reaction forces from visual marker data and analysis of balance response while walking on a laterally oscillating deck. Eng. Struct. 2013, 49, 1034–1047. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Lombaert, G.; Jonkers, I.; De Roeck, G.; Van den Broeck, P. Characterisation of walking loads by 3D inertial motion tracking. J. Sound Vib. 2014, 333, 5212–5226. [Google Scholar] [CrossRef]
- Toso, M.; Gomes, H.; da Silva, F.; Pimentel, R. Experimentally fitted biodynamic models for pedestrian-structure interaction in walking situations. Mech. Syst. Signal Process. 2015, 72–73, 590–606. [Google Scholar] [CrossRef]
- Bocian, M.; Brownjohn, J.; Racic, V.; Hester, D.; Quattrone, A.; Monnickendam, R. A framework for experimental determination of localised vertical pedestrian forces on full-scale sturctures using wireless attitude and heading reference systems. J. Sound Vib. 2016, 376, 217–243. [Google Scholar] [CrossRef]
- Brownjohn, J.; Bocian, M.; Hester, D.; Quattrone, A.; Hudson, W.; Moore, D.; Goh, S.; Lim, M. Footbridge system identification using wireless inertial measurement units for force and response measurements. J. Sound Vib. 2016, 384, 339–355. [Google Scholar] [CrossRef]
- Bocian, M.; Brownjoh, J.; Racić, V.; Hester, D.; Quattrone, A.; Gilbert, L.; Beasley, R. Time-dependent spectral analysis of interactions within groups of walking pedestrians and vertical structural motion using wavelets. Mech. Syst. Signal Process. 2018, 105, 502–523. [Google Scholar] [CrossRef]
- Brownjoh, J.; Chen, J.; Bocian, M.; Racić, V.; Shahabpoor, E. Using inertial measurement units to identify medio-lateral ground reaction forces due to walking and swaying. J. Sound Vib. 2018, 426, 90–110. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Zhao, G.; Seyfarth, A.; Van den Broeck, P. A robust methodology for the reconstruction of the vertical pedestrian-induced load from the registered body motion. Vibration 2018, 1, 250–268. [Google Scholar] [CrossRef]
- Middleton, C. Dynamic Performance of High Frequency Floors. Ph.D. Thesis, University of Sheffield, Sheffield, UK, 2009. [Google Scholar]
- Nigg, B.M.; Herzog, W. Biomechanics of the Musculo-Skeletal System, 3rd ed.; Wiley: New York, NY, USA, 2007. [Google Scholar]
- Li, Q.; Fan, J.; Nie, J.; Li, Q.; Chen, Y. Crowd-induced random vibration of footbridge and vibration control using multiple tuned mass dampers. J. Sound Vib. 2010, 329, 4068–4092. [Google Scholar] [CrossRef]
- Butz, C. Beutrag zur Berechnung fussgängerinduzierter Brückenschwingungen—Shaker Verlag (Contribution to the Determination of Pedestrian Induced Bridge Vibrations). Ph.D. Thesis, RWTH Aachen, Aachen, Germany, 2006. [Google Scholar]
- van den Bogert, A.; Read, L.; Nogg, B. A method for inverse dynamic analysis using accelerometry. J. Biomech. 1996, 29, 949–954. [Google Scholar] [CrossRef]
- Liikavainio, T.; Bragge, T.; Hakkarainen, M.; Jurvelin, J.; Karjalainen, P.; Arokoski, J. Reproducibility of loading measurements with skin-mounted accelerometers during walking. Arch. Phys. Med. Rehabil. 2007, 88, 907–915. [Google Scholar] [CrossRef]
- Denoth, J. Chapter: Load on the locomotor system and modelling. In Biomechanics of Running Shoes; Nigg, B., Ed.; Human Kinetics Publishers: Champaign, IL, USA, 1986; pp. 63–116. [Google Scholar]
- Silva, F.; Pimentel, R. Biodynamic walking model for vibration serviceability of footbridges in vertical direction. In Proceedings of the 8th International Conference on Structural Dynamics of EURODYN, Leuven, Belgium, 4–6 July 2011. [Google Scholar]
- Silva, F.; Brito, H.; Pimentel, R. Modeling of crowd load in vertical direction using biodynamic model of pedestrians crossing footbridges. Can. J. Civ. Eng. 2014, 41, 1196–1204. [Google Scholar] [CrossRef]
- Racić, V.; Pavić, A. Mathematical model to generate near-periodic human jumping force signals. Mech. Syst. Signal Process. 2010, 24, 138–152. [Google Scholar] [CrossRef]
- Bachmann, H.; Ammann, W.; Deischl, F. Vibration Problems in Structures: Practical Guidelines; Springer: Berlin/Heidelberg, Germany, 1995. [Google Scholar]
- Draper, N.; Smith, H. Applied Regression Analysis; Wiley: New York, NY, USA, 1998. [Google Scholar]
- Duysens, J.; Jonkers, I.; Verschueren, S. MALL: Movement & Posture Analysis Laboratory Leuven; Interdepartmental Research Laboratory at the Faculty of Kinisiology and Rehabilitation Sciences—KU Leuven: Leuven, Belgium.
- Gulf Coast Data Concepts. User Manual X16-1D USB Accelerometer Data Logger; Gulf Coast Data Concepts: Waveland, MS, USA, 2016. [Google Scholar]
- Vicon Motion Systems. Vicon Motion Systems Product Manuals; Vicon Motion Systems: Oxford, UK.
- Van Nimmen, K.; Van Hauwermeiren, J.; Van den Broeck, P. Eeklo footbridge: Benchmark Dataset on Pedestrian-Induced Vibrations. J. Bridge Eng. 2021, 26, 05021007. [Google Scholar] [CrossRef]
- Van Nimmen, K.; Lombaert, G.; De Roeck, G.; Van den Broeck, P. The impact of vertical human-structure interaction on the response of footbridges to pedestrian excitation. J. Sound Vib. 2017, 402, 104–121. [Google Scholar] [CrossRef]
- Ricciardelli, F.; Pizzimenti, A. Lateral walking-induced forces on footbridges. J. Bridge Eng. 2007, 12, 677–688. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | ID | Type | Description |
|---|---|---|---|
| Reference model | ref | measured | load pattern per participant per trial |
| Half-cycle sine pulses | 1 | generalized | cfr. Wheeler [7], Bachmann & Ammann [8] |
| Heel-strike load pattern | 2 | generalized | cfr. Pańtak in [11,12] |
| Forefoot-strike load pattern | 3 | generalized | cfr. Pańtak in [11,12] |
| Participant | Sex | Age | Length (m) | m (kg) | Running Speeds (km/h) |
|---|---|---|---|---|---|
| 1 | M | 25 | 1.82 | 77 | (9; 9.5; 10; 10.5; 11; 11.5) |
| 2 | M | 22 | 1.77 | 72 | (7.5; 8; 8.5; 9; 9.5; 10) |
| 3 | M | 51 | 1.75 | 77 | (9; 9.5; 10; 10.5; 11; 11.5) |
| 4 | M | 27 | 1.89 | 72 | (10; 10.5; 11; 11.5; 12; 12.5) |
| 5 | M | 28 | 1.90 | 85 | (10; 10.5; 11; 11.5; 12; 12.5) |
| 6 | F | 32 | 1.66 | 54 | (7.5; 8; 8.5; 9; 9.5; 10) |
| 7 | M | 24 | 1.87 | 82 | (9; 9.5; 10; 10.5; 11; 11.5) |
| 8 | M | 24 | 1.85 | 79 | (9.5; 10; 11; 12; 12.5; 13) |
| 9 | M | 24 | 1.73 | 71 | (9.5; 10; 10.5; 11; 11.5; 12) |
| 10 | M | 21 | 1.85 | 78 | (9; 9.5; 10; 10.5; 11; 8.5) |
| 11 | M | 22 | 1.85 | 77 | (8; 8.5; 9; 9.5; 10.5; 12) |
| 12 | M | 22 | 1.65 | 74 | (10; 10.5; 11; 11.5; 12; 12.5) |
| 13 | M | 21 | 1.77 | 81 | (9; 9.5; 10; 10.5; 11.5; 12) |
| Model | (%) | (%) | (%) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| = 1 | = 2 | = 3 | = 4 | |||||||
| Newton | 52 | 36 | 70 | 83 | 78 | 91 | 80 | 63 | 34 | 28 |
| ref | 98 | 97 | 99 | ⪅ 100 | ⪅ 100 | ⪅ 100 | ⪅ 100 | 89 | 78 | 74 |
| 1 | 95 | 94 | 97 | 98 | 98 | 99 | 101 | 81 | 112 | 43 |
| 2 | 96 | 95 | 97 | 98 | 98 | 99 | 101 | 77 | 115 | 42 |
| 3 | 91 | 89 | 94 | 95 | 94 | 98 | 82 | 54 | 49 | 99 |
| Test | # Persons | Type | Trajectory |
|---|---|---|---|
| 1 | 1 | target = synch with mode 2 | at 1/4th off the width of the cross section |
| 2 | 3 | target = synch with mode 2 | at 1/4th off the width of the cross section |
| 3 | 7 | self-selected pacing rate | along the centerline of the cross section |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van Nimmen, K.; Vanwanseele, B.; Van den Broeck, P. Reconstruction of the Vertical Dynamic Running Load from the Registered Body Motion. Vibration 2022, 5, 464-482. https://doi.org/10.3390/vibration5030026
Van Nimmen K, Vanwanseele B, Van den Broeck P. Reconstruction of the Vertical Dynamic Running Load from the Registered Body Motion. Vibration. 2022; 5(3):464-482. https://doi.org/10.3390/vibration5030026
Chicago/Turabian StyleVan Nimmen, Katrien, Benedicte Vanwanseele, and Peter Van den Broeck. 2022. "Reconstruction of the Vertical Dynamic Running Load from the Registered Body Motion" Vibration 5, no. 3: 464-482. https://doi.org/10.3390/vibration5030026
APA StyleVan Nimmen, K., Vanwanseele, B., & Van den Broeck, P. (2022). Reconstruction of the Vertical Dynamic Running Load from the Registered Body Motion. Vibration, 5(3), 464-482. https://doi.org/10.3390/vibration5030026