4.1. Curved Cantilevered Beam
While most structures considered in validations have been restrained on all sides (clamped, simply supported, or on spring support), some cantilevered examples have been investigated, e.g., [
10,
11,
21,
22,
27,
33], in the context of wings and blades. One particular observation drawn from them is that the membrane stretching-transverse deformations coupling is, in general, smaller than it would be if the structure was restrained on all sides. This occurs because the cantilevered structure is more free to stretch and thus exhibits smaller membrane stresses, which affect the transverse behavior. In fact, when the structure is flat, this coupling is so dramatically reduced [
21] that the identification of the ROM coefficients following the algorithms of [
4,
39] can be problematic and that an alternate strategy, specific to flat structures, has been proposed [
21].
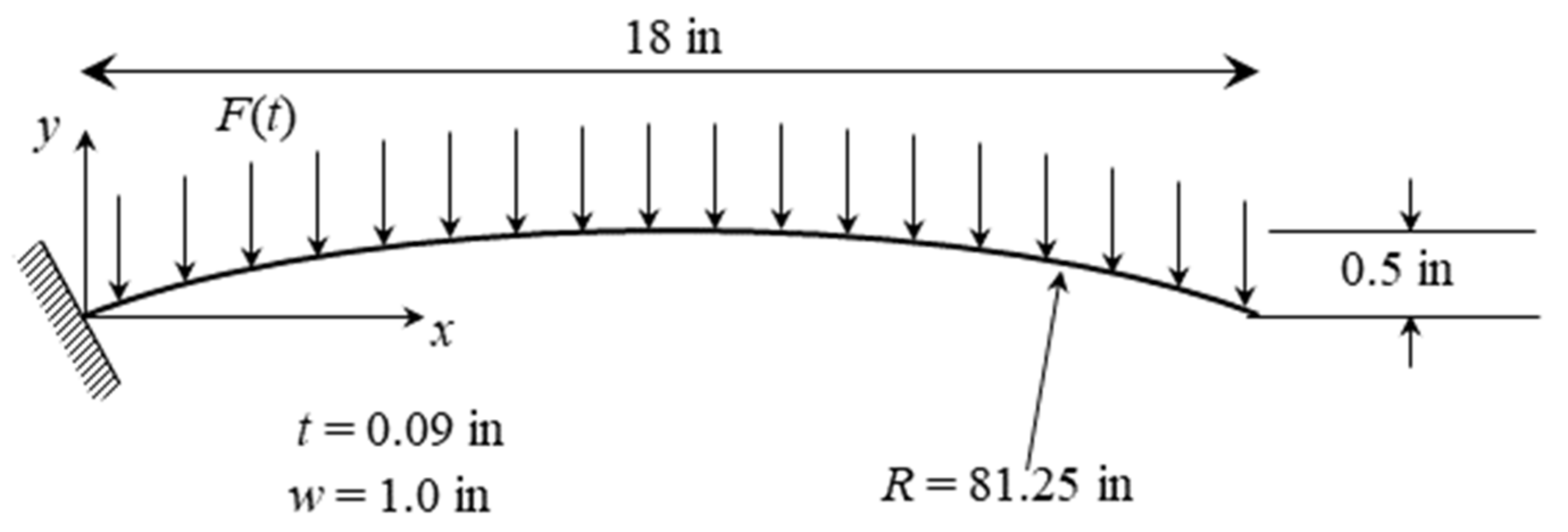
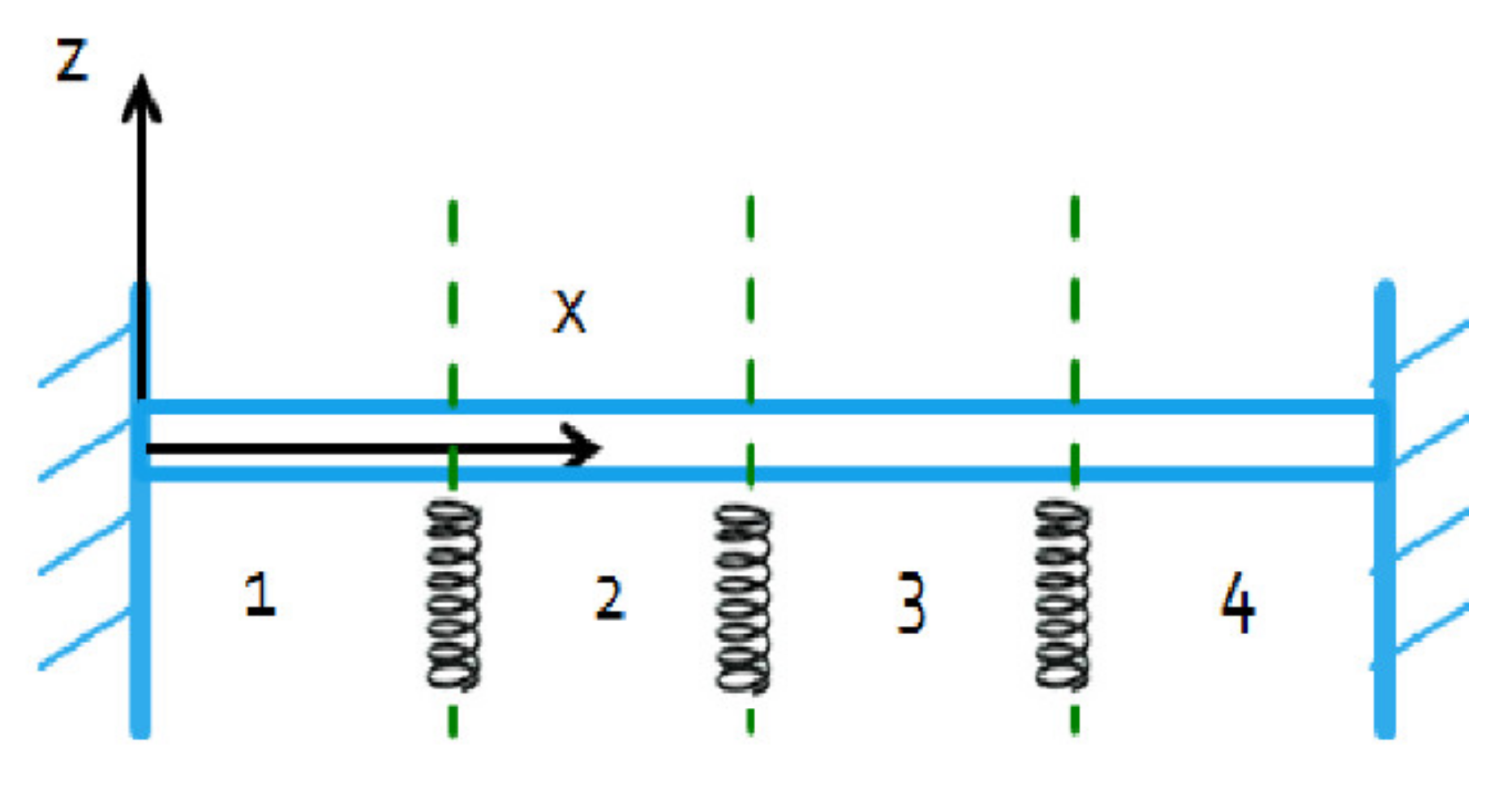
It is desired here to assess whether such issues also occur when the structure is slightly curved. To this end, the curved beam of [
5,
43] was reconsidered but cantilevered, as shown in
Figure 1, as opposed to fully clamped. The material properties were selected as: elastic modulus of 10.6 Mpsi, shear modulus of 4.0 Mpsi, and density of 2.588 × 10
−4 lbf-sec
2/in
4. The coefficients of the Rayleigh damping were selected as α = 1.0293 1/s and β = 3.8677 × 10
−5 s. The beam was modeled in Nastran using 144 beam elements (CBEAM).
The reduced order model of the beam was constructed under the expectation that it would be subjected to a dynamic loading in the frequency band [0, 100] Hz, and, accordingly, the first 3 linear modes of frequencies 9.05, 56.33, and 83.54 Hz were retained. The fourth mode has natural frequency of 158.24 Hz and thus was not retained as it is significantly above the excitation band cutoff. Given the Rayleigh damping coefficients, the damping ratios of the 3 modes were 1.02%, 0.83%, and 1.11%.
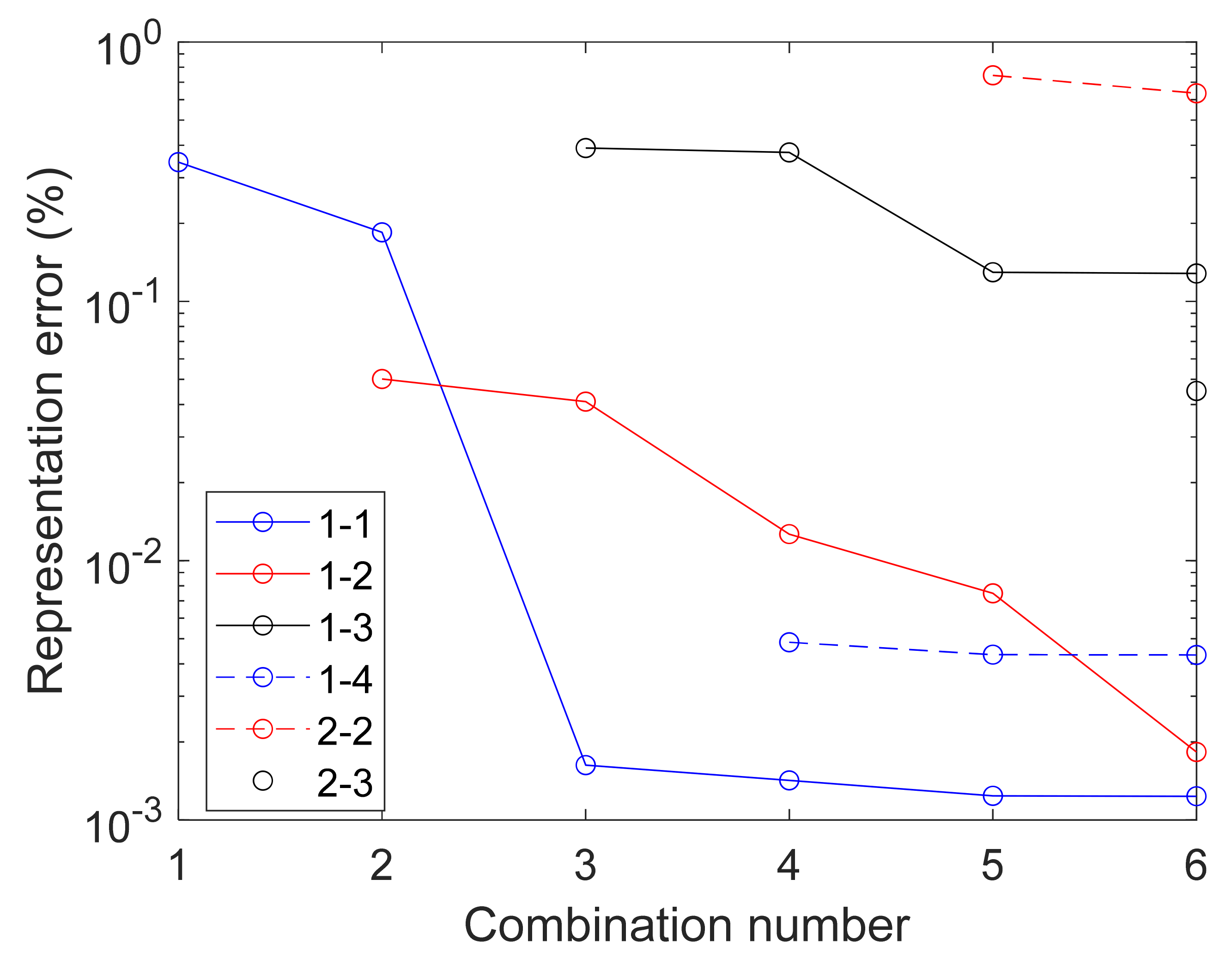
For the determination of the duals, all 6 combinations of the 3 linear modes, i.e., 1-1, 1-2, 1-3, 2-2, 2-3, 3-3, were considered with the data generated as in Equations (12) and (13) with the coefficients
, both positive or negative, spanning the range of induced displacement with peak transverse deflection in the range of 1% to 10% of the span (positive and negative). The representation error criterion of Equation (9) was used to determine the number of duals. The threshold of 1% was achieved by taking a single dual for each combination, see
Table 1, leading to a 3L6D basis. The coefficients of the corresponding ROM were then identified according to the tangent stiffness approach of [
4].
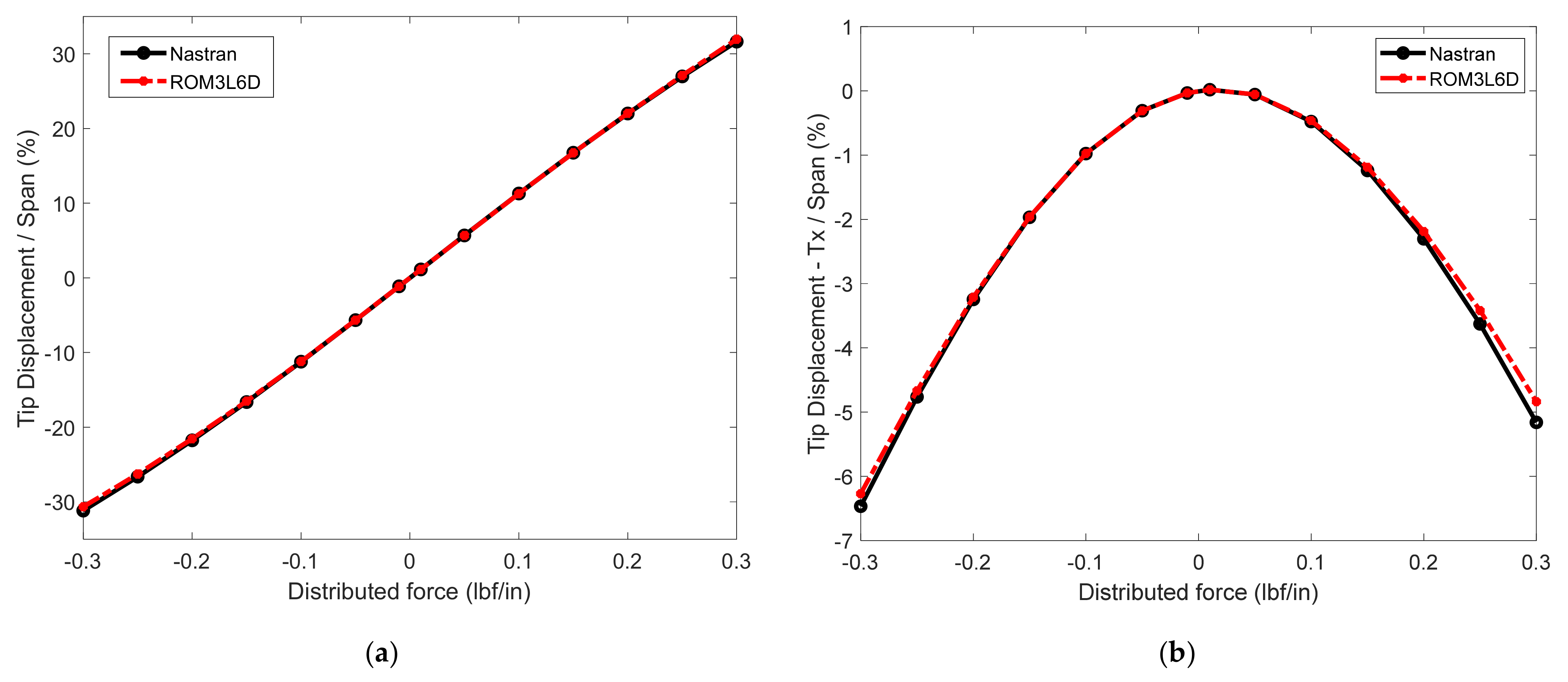
It is often found useful to do a static validation first, and a uniformly distributed load was considered for that effort. The values of the generalized coordinates that would be obtained in the linear case are (with respect to that of mode 1) 1, 1.42 × 10
−2, −3.75 × 10
−3, and 7.44 × 10
−4. Since the last value is quite small (in relation to that of mode 1), it would appear that the current ROM basis of 3 linear modes is appropriate for this computation. This expectation is confirmed by the results of
Figure 2, which shows the transverse (vertical) and in-plane (horizontal) displacements of the beam tip. An excellent matching of the Nastran results is obtained for transverse deflections as large as 30% of the span!
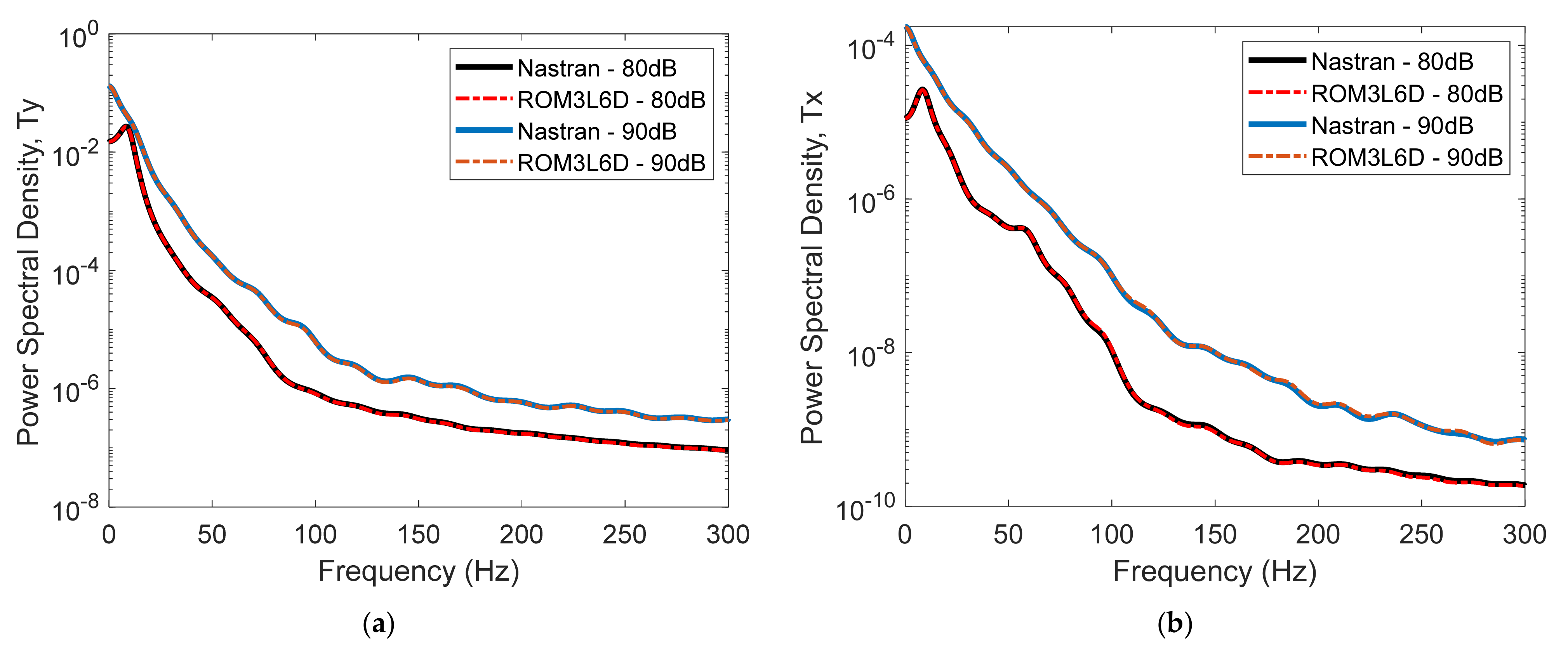
Next, a dynamic validation was performed using a uniformly distributed pressure varying as a bandlimited white noise in the frequency range [0, 100] Hz. Shown in
Figure 3 are comparisons of the Nastran and ROM predicted power spectral densities of the transverse and in-plane tip deflections corresponding to 80dB and 90dB excitations, which give rise to standard deviations of tip transverse deflections of 4.15% and 7.73 of span or 8.30 and 15.46 thicknesses, respectively. Again, an excellent agreement is obtained.
4.2. Freely Expanding Plate
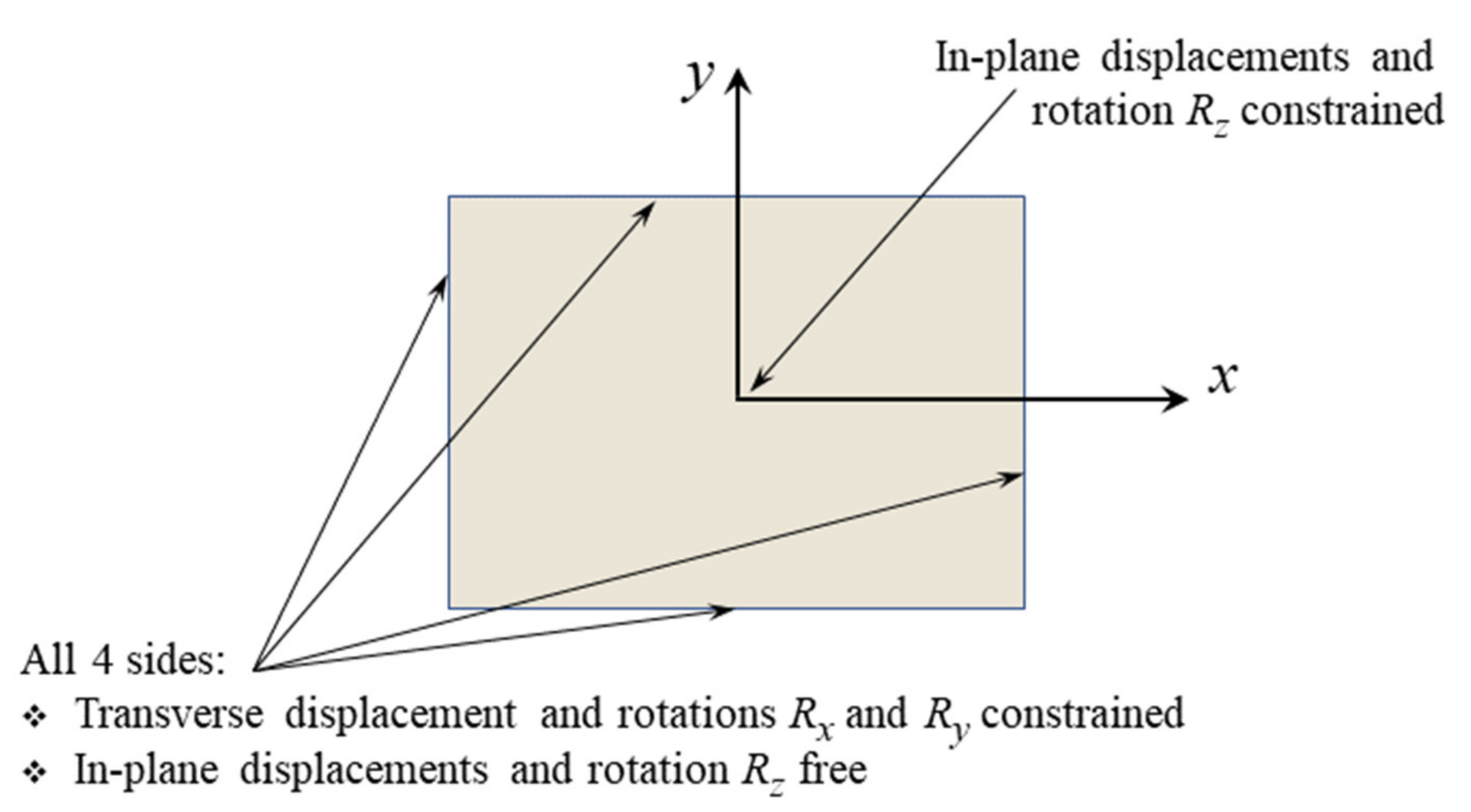
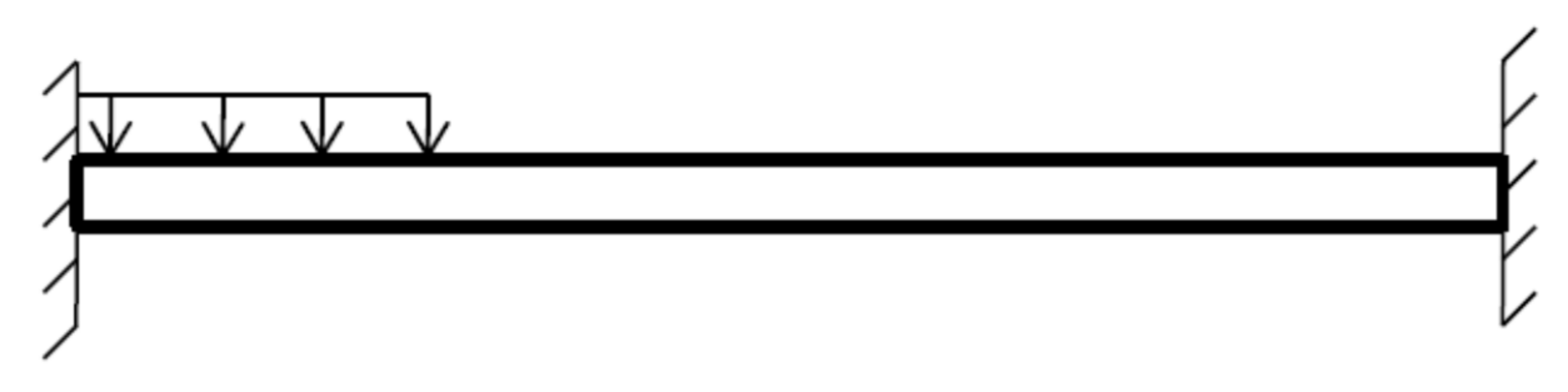
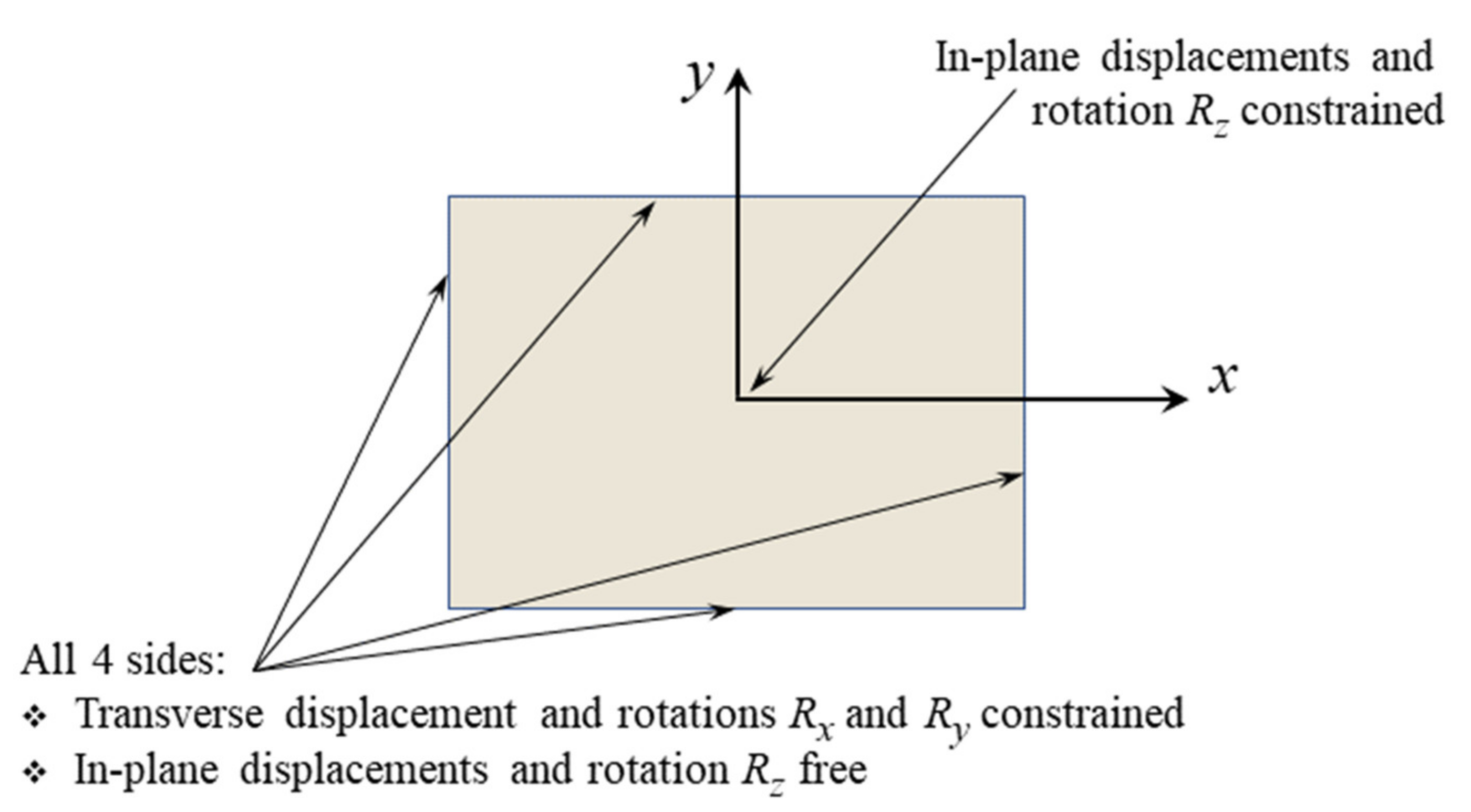
The next validation focuses on an atypical boundary condition that could be considered between cantilevered and clamped. Specifically, the transverse displacement and rotation will be constrained (as if being clamped), while in-plane displacements will be allowed (as would be if cantilevered). A flat plate model is considered with this “freely expanding” boundary condition (see
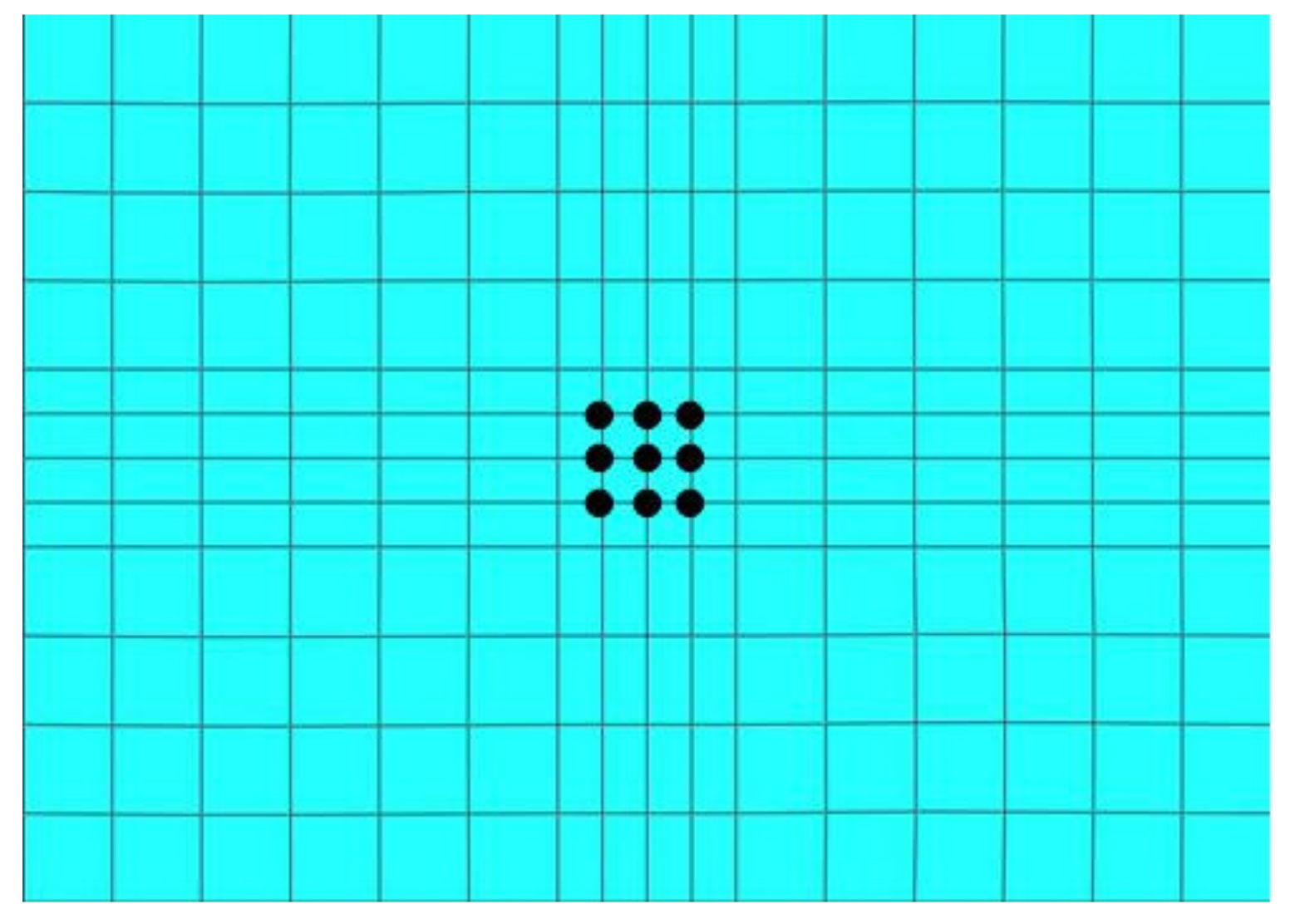
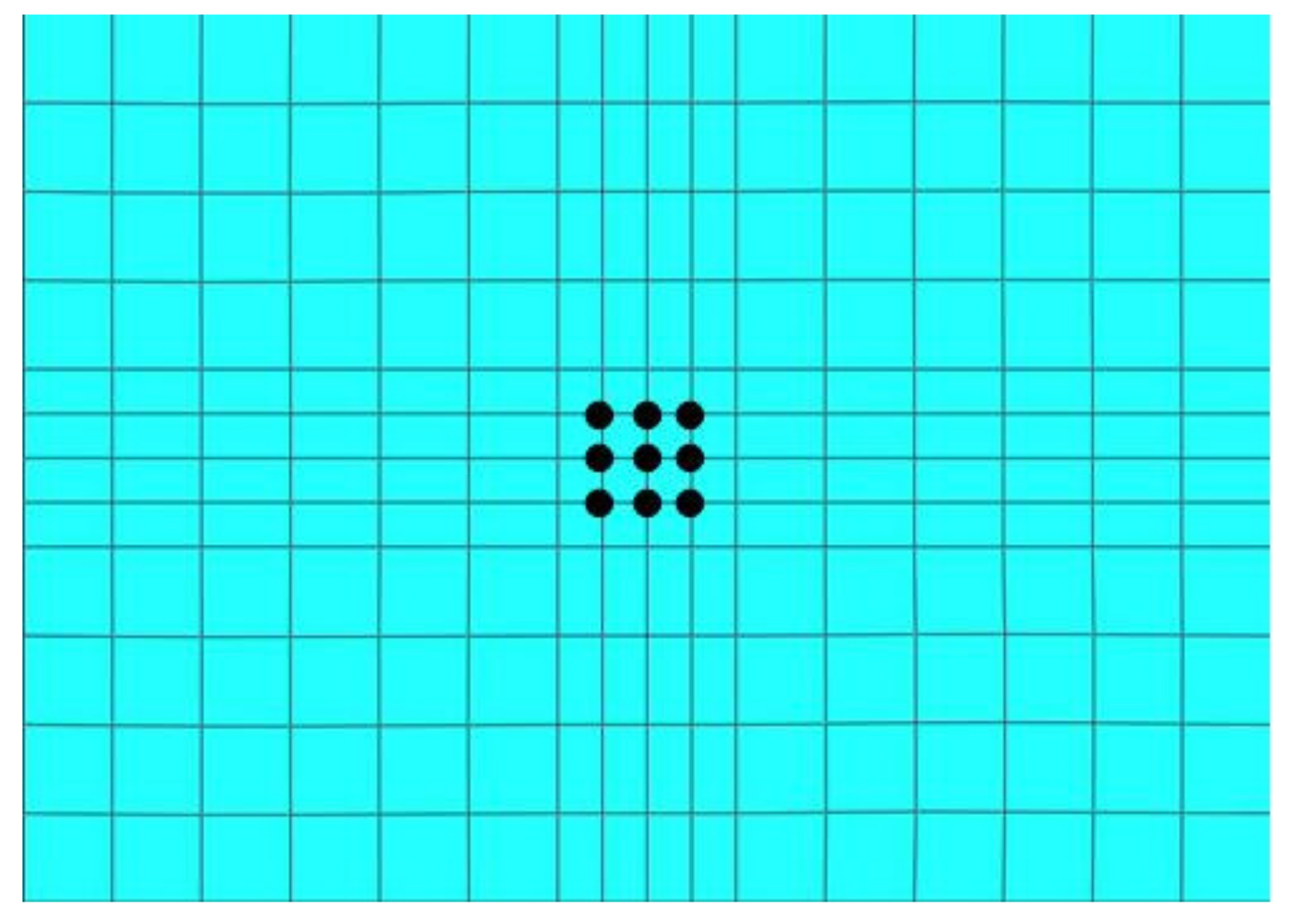
Figure 4). Note that the in-plane displacements and the transverse rotation are fixed at the plate middle to prevent the occurrence of rigid body modes. In the finite element implementation, this single point boundary condition was actually extended over a 3 × 3 array of nodes at the center of the plate (see
Figure 5). The freely expanding boundary condition is useful for structures that are heated as the thermally induced expansion is free to occur, thereby preventing the risk of thermal buckling, and has apparently been used on the SR-71.
The geometrical and material properties of this panel are given in
Table 2. It was discretized in Nastran using 16 × 12 4-node shell elements (CQUAD4), as shown in
Figure 5. The coefficients of the Rayleigh damping were selected as α = 12.838/s and β = 2.061 × 10
−6 s.
It was desired to construct a ROM in anticipation of a uniform (or doubly symmetric) pressure distribution varying in time as a bandlimited white noise in the range of [0, 1040] Hz, and the modes retained had that property. The natural frequencies (in Hz) and corresponding damping ratios (in parentheses) of the first doubly symmetric modes were found to be 110 (1.00%), 300 (0.53%), 525 (0.53%), 700 (0.60%), 704 (0.60%), and 1090 (0.80%).
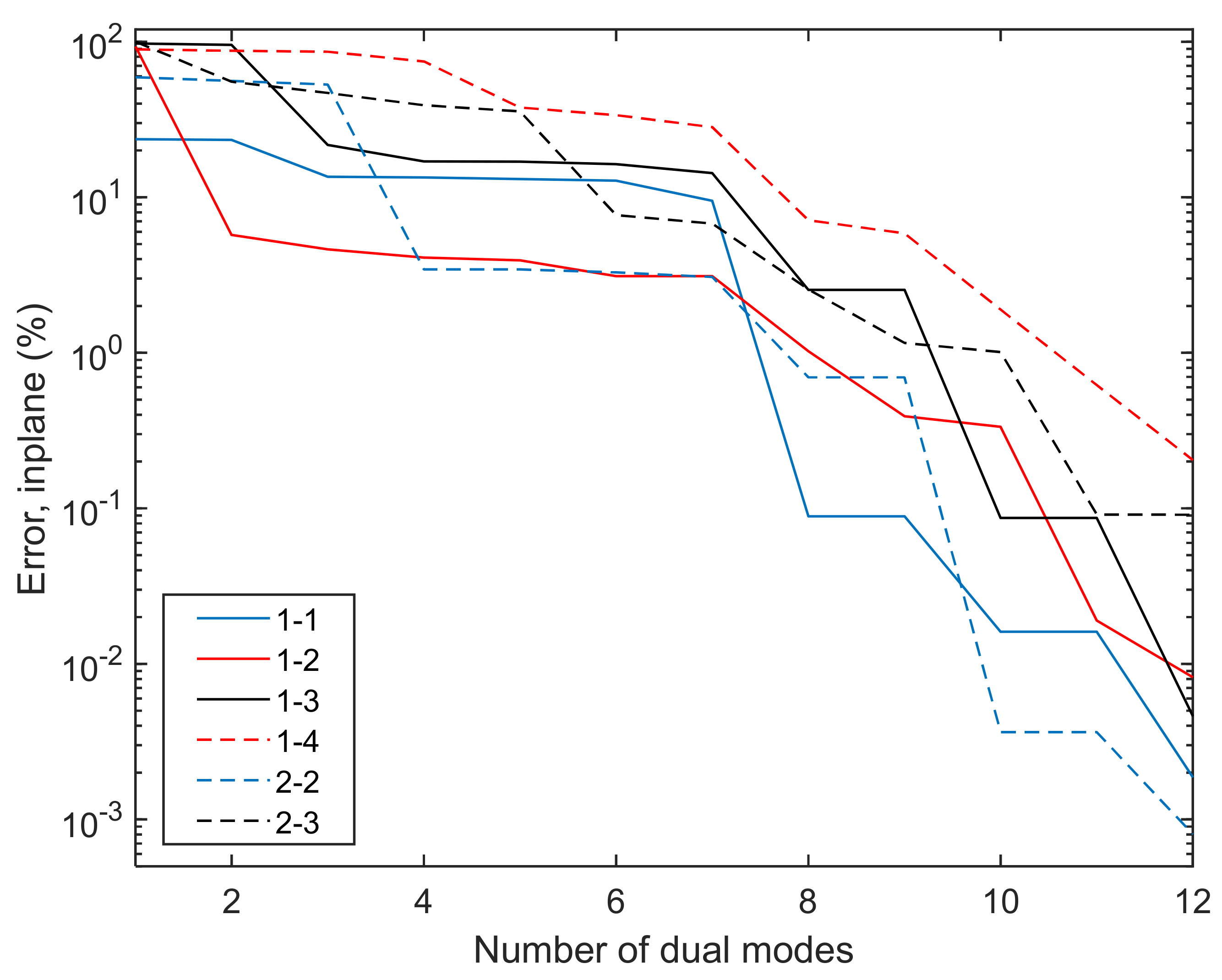
The ROM was constructed using the 6 modes above (all effectively in band). Mode 1 was expected to be the significantly dominant mode, and, thus, the combinations considered for the dual modes were 1-1, 1-2, 1-3, 1-4, 1-5, 1-6. In addition, the 2-2 combination was also added, recognizing that mode 2 also has a notable contribution to the response. The peak transverse displacements were selected to be 1.6 thickness. Selecting one eigenvector as dual for each combination led to 7 duals and a 13-mode basis. The representation errors of the data generated to create the duals by the 13 modes are well below the 1% threshold, e.g., see
Table 3. Accordingly, the 6L7D ROM basis was retained and the corresponding stiffness coefficients were identified using the modal force approach of [
39].
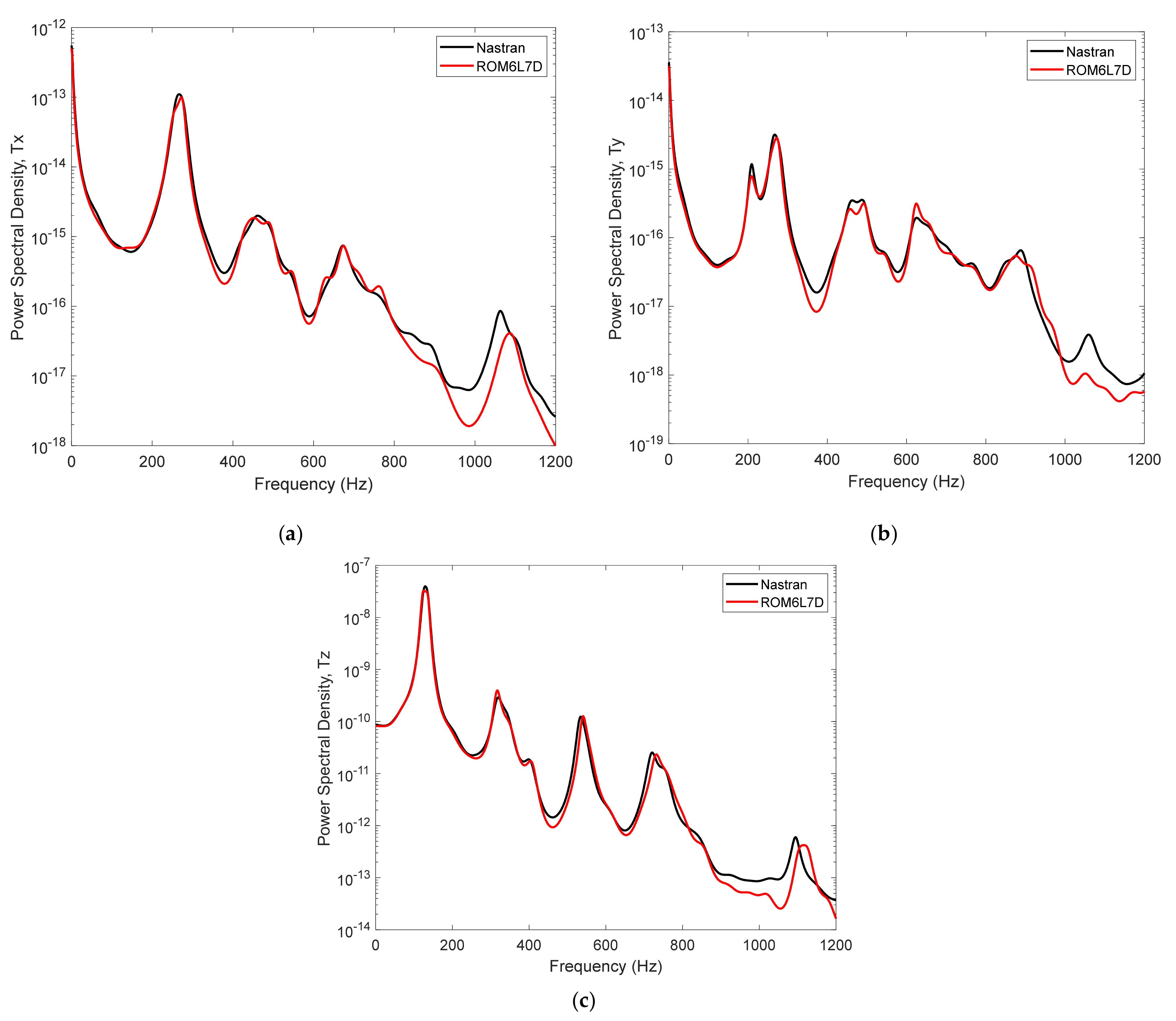
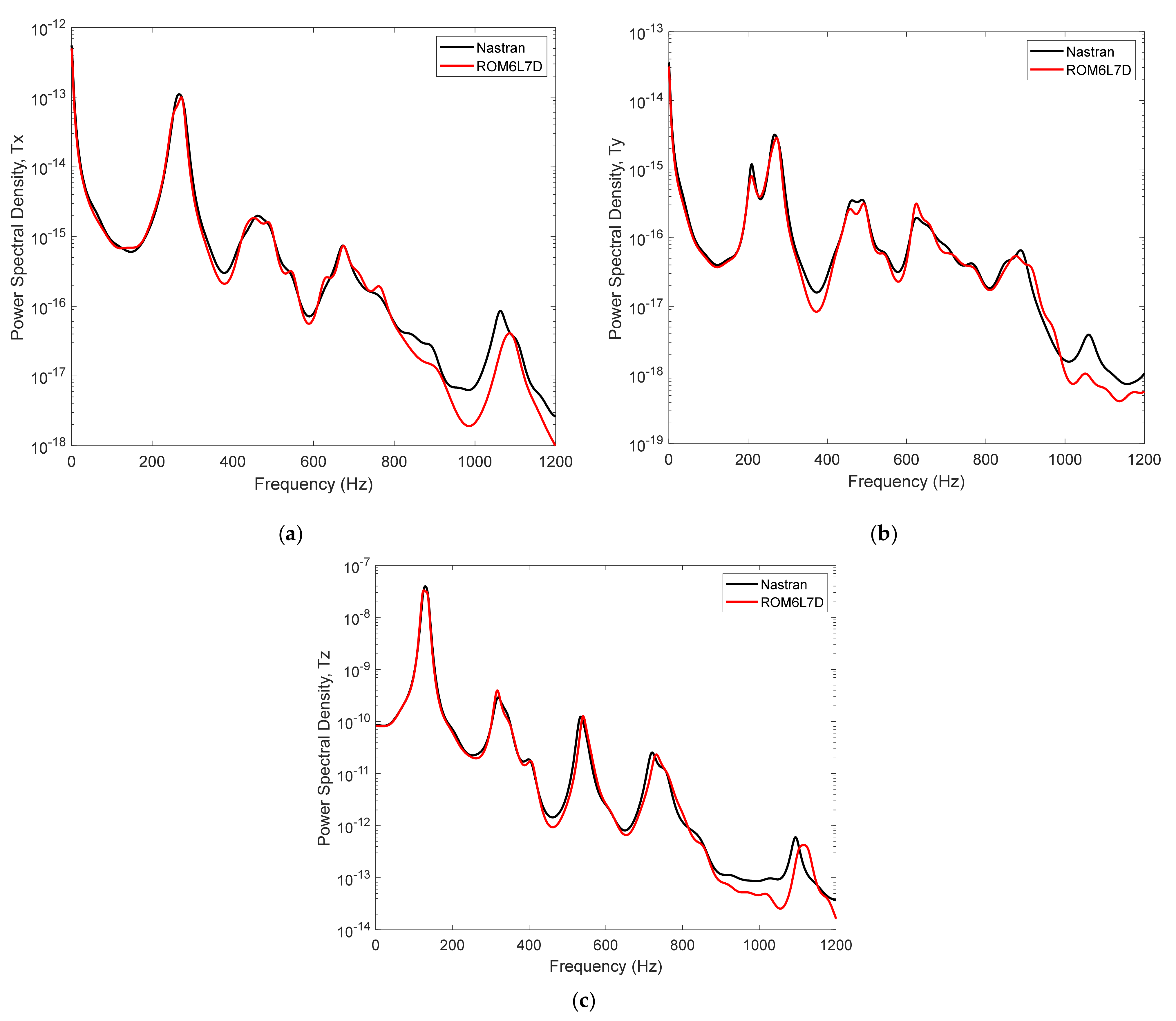
The produced ROM performed very well in comparison with the full finite element model. As an example, note the accurate matching of the power spectral densities of the transverse response of the panel middle and the in-plane displacements of a corner obtained with the ROM and the full finite element model shown in
Figure 6. The excitation sound pressure level is 147 dB, leading to standard deviations of the peak transverse displacement of 1.2 thickness and in-plane displacements of the corners of 0.004 and 0.0008 thicknesses in the
x and
y directions, respectively.
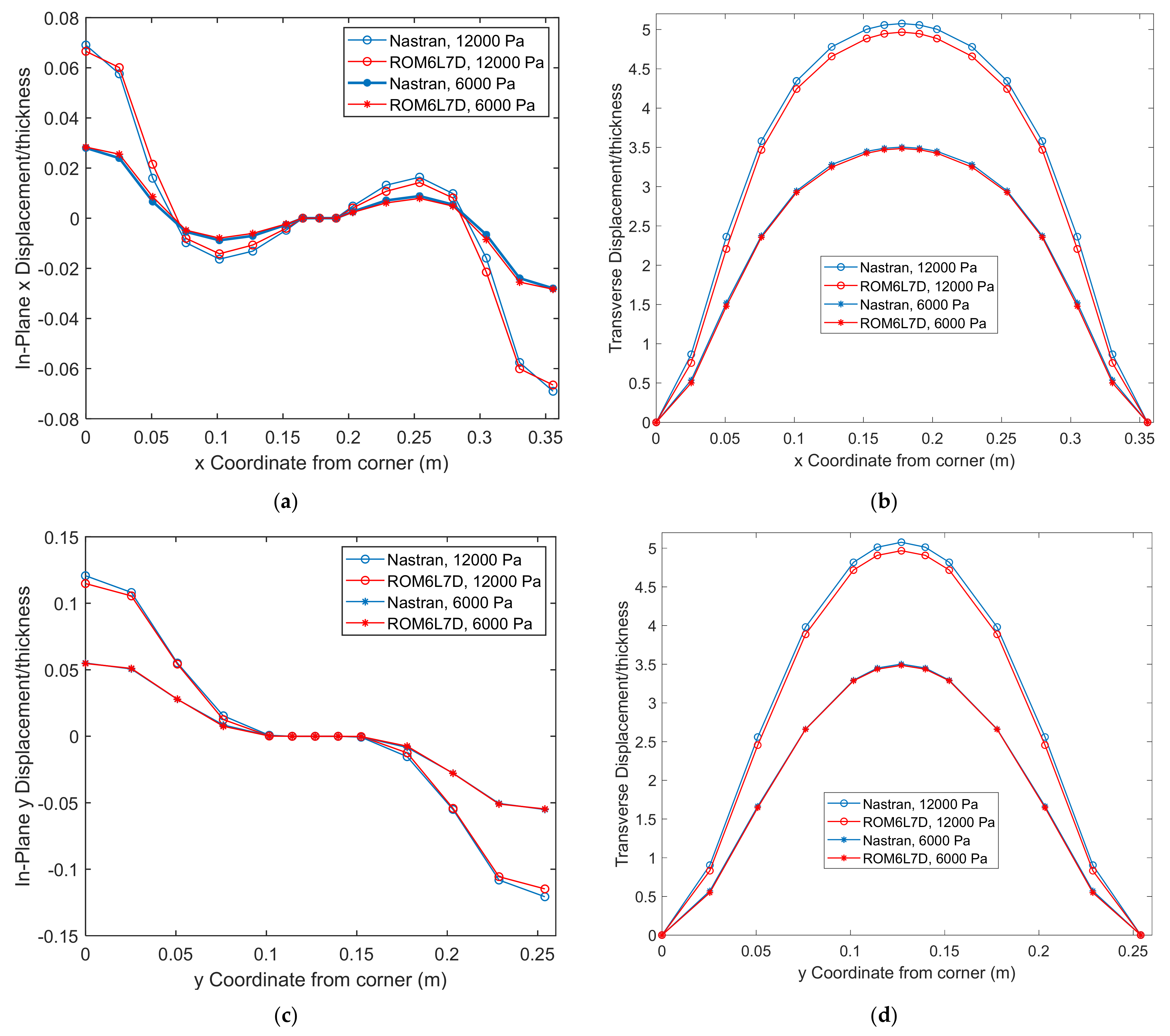
It was also of interest to check the applicability of the ROM to a similar but static loading, and a uniform load was chosen for that purpose. Shown in
Figure 7 are the nonzero displacements along the middle lines
y = 0 and
x = 0 for the two different pressures of 6000 Pa and 12,000 Pa, leading to large nonlinear deflections, i.e., peak transverse deflections of 3.5 and 5.1 thicknesses. At the lowest, still high, level, the matching between the 6L7D ROM and finite element model predictions is nearly perfect. At the very high level of 5.1 thickness, the ROM underestimates the peak response by only 2%, a very good prediction. Note in
Figure 7a,c the zero in-plane displacements at the nodes with black dots in
Figure 5.
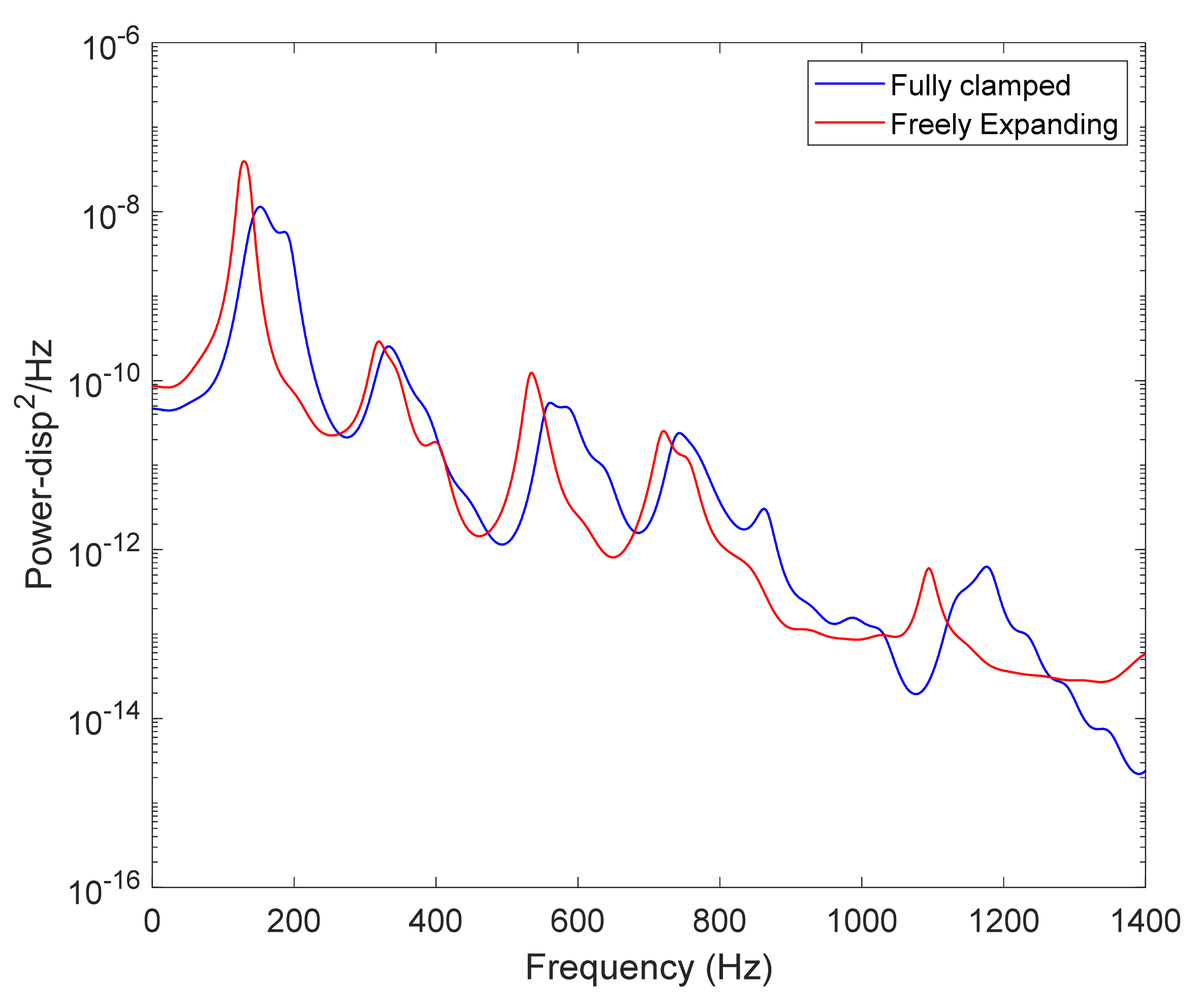
It is interesting to compare the response of this panel to its fully clamped counterpart; see
Figure 8 for the transverse displacements of the panel center. The unconstrained in-plane displacements have effectively reduced the nonlinearity of the panel in the transverse direction, as is seen by (i) the increase in peak response in modes 1, 3, and 6, (ii) the reduced shift of the peaks of the spectrum as compared to the natural frequencies, and (iii) the smaller width of these peaks.
The reduced nonlinearity can also be drawn from the ROM coefficients. For flat structures, one can differentiate two sets of cubic nonlinear terms for the linear modes (see [
21]). One set of coefficients corresponds to the in-plane displacements fixed; these are the coefficients of the ROM as the linear modes are purely transverse and the duals purely in-plane. Then, when imposing displacement fields along the linear modes to get the coefficients
(see [
4,
39]) with all indices relating to linear modes, no in-plane motion occurs. The other set of coefficients, referred to as condensed and denoted
, correspond to the transverse nonlinearity observed when the in-plane displacements occur as needed. These coefficients can either be derived from the ROM through a static condensation of the in-plane/dual generalized coordinates or by an appropriate finite element computation (see [
21] for details).
The difference between the corresponding ROM coefficients of the two sets quantifies the softening induced by the membrane stretching/in-plane displacements. Since mode 1 is dominant in both responses, it is sufficient here to consider the coefficients
and
(see
Table 4). For the freely expanding plate, it is seen that
is 17% of
, i.e., the in-plane displacements reduce the nonlinear stiffening by 83%. For the sake of comparison, for the identical but fully clamped plate, this reduction is only 31% (see
Table 4). Moreover, for flat cantilevered structures, this reduction is by factors of the order of 99% with the ratio
/
of the order of 10
−4 or less (see [
21]). Thus, as stated above, the freely expanding boundary condition appears as an intermediate between fully clamped and cantilevered.
Analyzing the coefficients of
Table 4, it should be noted that the transverse–in-plane coupling coefficient
is actually smaller for the freely expanding plate than for the fully clamped one, but it is the much reduced value of the in-plane natural frequency (i.e.,
) that triggers the higher membrane stretching effect. It implies larger in-plane displacements in comparison to the fully clamped plate, which induce the larger softening of the transverse nonlinearity even though the coupling terms are smaller.
4.3. Orthogrid Panel
The advantages of using finite element models developed in commercial software and then reducing them to ROMs are most impactful on complex structures. This was, in particular, demonstrated on the 9-bay panels of [
4,
7], but another interesting example is the orthogrid panel created by Boeing [
46] and subsequently considered in [
47]. The finite element model developed in [
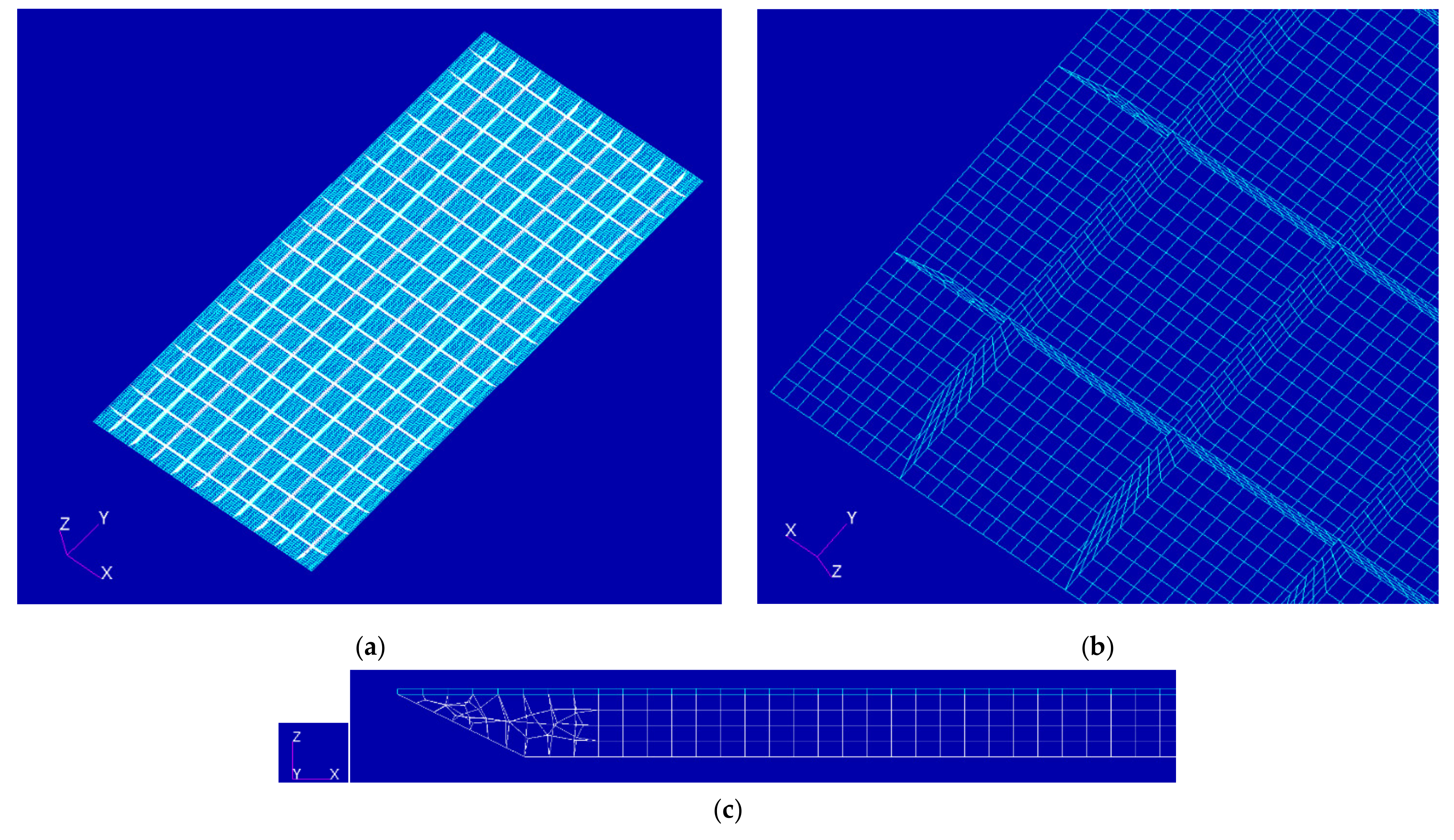
47] is shown in
Figure 9 and its geometry and material properties are summarized in
Table 5. It consists of a flat rectangular skin stiffened on its underside by an 18 × 10 array of stiffeners tapered at the edges and of identical material as the skin. It was modeled within Nastran using 48,400 4-node shell elements (CQUAD4) and approximately the same number of nodes for about 290,000 degrees of freedom (see discussion in [
47]).
This panel was introduced in [
46,
47] for coupled aerodynamic–thermal–structural analyses in which the structural deformations were considered quasi-statically. Accordingly, the focus here is on the development of a ROM for static nonlinear analyses, so the selection of the linear modes based on the frequency band of the excitation is not relevant. This observation is clearly true not only for the nonlinear ROM but also for a linear modal model. Following the above recommendations (
Section 3), the linear modes to be used for the linear problem will thus first be clarified, and this analysis will be achieved using uncertainty propagation concepts.
Specifically, it is known that small variations in geometry and material properties, collectively referred to as “structural uncertainty”, affect the response of structures, especially in zones of high modal density, which are prone to occur at “high” frequencies. Thus, above a certain frequency band, the deterministic finite element solution is, in general, not an accurate representation of the response of nominally identical but actually different structures because the variability between them induces “large” random variations to the response. The validity of the deterministic reduced order model to be developed thus does not need to extend into that “high frequency” domain since there is no accurate deterministic baseline model available. Effectively, this criterion provides an upper limit to the number of modes to be considered.
This discussion is particularly relevant for the orthogrid panel of
Figure 9, which is composed of nominally identical cells connected to each other. It can thus be viewed as a two-dimensional chain, and structures of this type are known to potentially exhibit localization of the free response and high sensitivity of the forced response to small variations of the properties of the chain elements.
The uncertainty propagation analysis was carried out on the linear structural problem by adopting the nonparametric maximum entropy (MaxEnt) approach of [
48,
49] (see also [
36]) and assuming that the uncertainty is in the stiffness properties (since the desired model is to be used for static analyses). This approach assumes that a (linear) ROM of the structure has first been established and its stiffness matrix is denoted as
. This matrix is then replaced by a random one
, which is expressed as
where
is any decomposition, e.g., Cholesky for simplicity, of
as
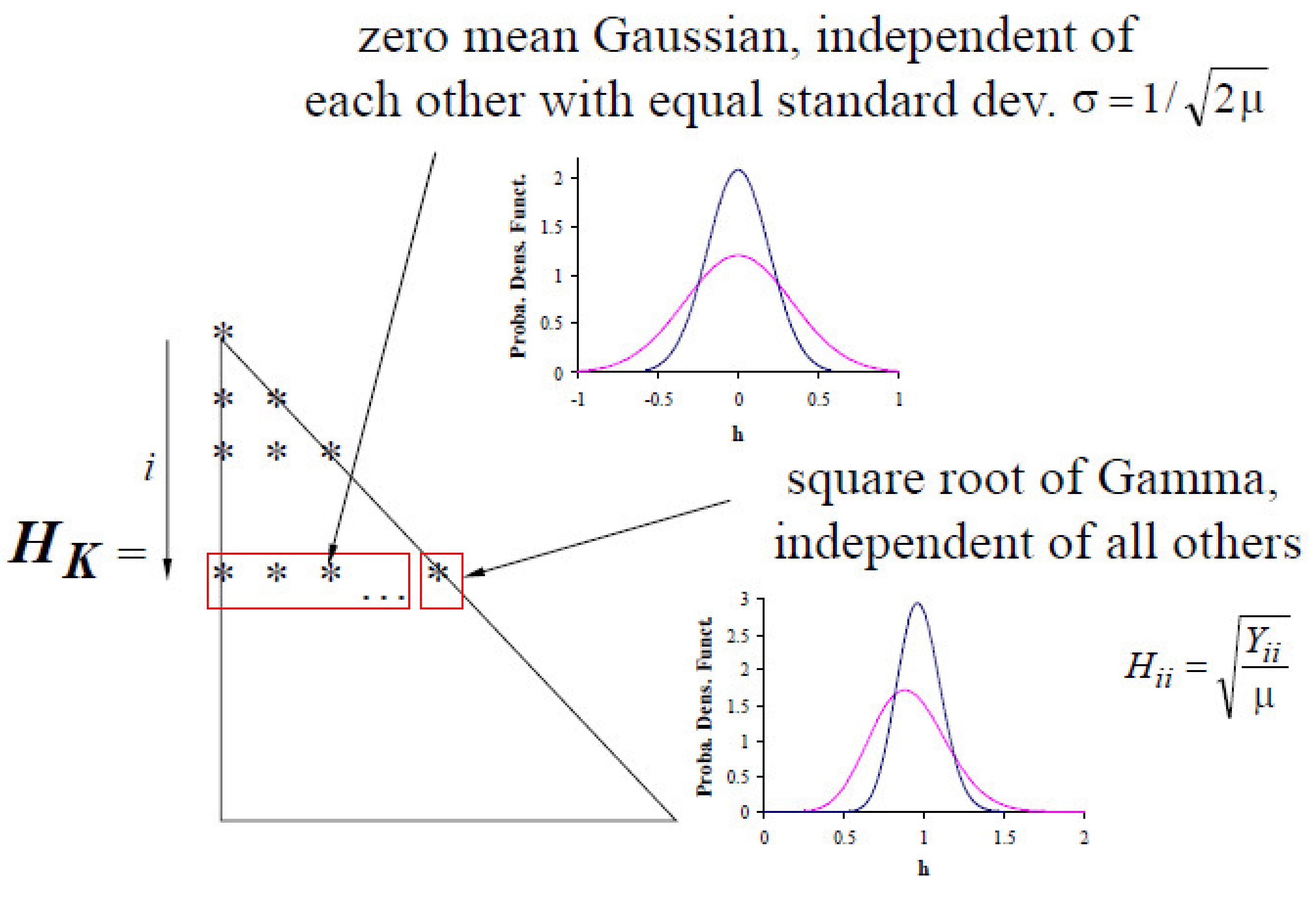
Moreover, in Equation (16), the random matrix
, see
Figure 10, is lower triangular, with all of its elements independent of each other and the off diagonal ones identically distributed as zero mean Gaussian random variables with common standard deviation σ. Finally, the diagonal elements of
can be expressed as
, where
is a Gamma random variable of parameter
. In these definitions, one has
where
n is the size of the matrix
and δ represents the overall level of randomness, defined as the coefficient of variation of the random matrix
.
The first 200 linear, mass normalized modes of the orthogrid panel were selected as basis for the above linear ROM. Accordingly, the matrix was 200 × 200, diagonal with elements equal to the squared natural frequencies. Accordingly, L, see Equation (17), was also diagonal with elements equal to the frequencies. Then, 50 samples of the full random matrix were simulated as above with δ = 0.1, which induces coefficients of variations (ratio of standard deviation by mean) of the 200 natural frequencies in the range of 0.4% to 0.6% for the frequency up to about 1300 Hz and drops to the range of 0.1% to 0.2% afterwards.
To assess the impact of the uncertainty on the linear forced response of the panel, the transfer functions of the response at various points were computed for each sample of stiffness matrix
assuming a uniformly distributed pressure on the skin varying harmonically in time. A Rayleigh damping was selected for these computations with α = 13.95/s and β = 2.386 × 10
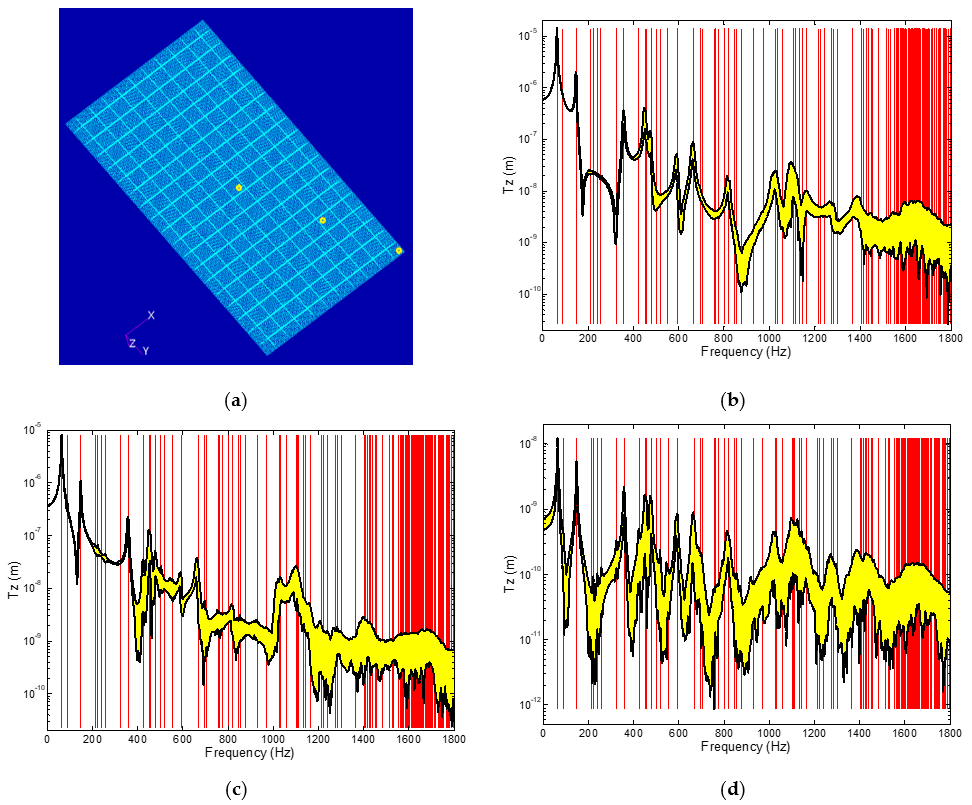
−6 s, which leads to damping ratios from 0.5% to 2% for the modes in the current frequency range. Shown in
Figure 11 are typical results of these computations for the three locations of the panel shown in
Figure 11a, i.e., the center point, a quarter point, and a point close to the edge. The figures of
Figure 11b–d display (in yellow) the uncertainty bands of the transfer functions corresponding to the range between the 5th and the 95th percentiles of the responses and thus include 90% of the responses. Note on these figures that the red lines indicate the natural frequencies of the deterministic panel, which clearly become densely populated at high frequencies.
It is observed in
Figure 11b–d that the uncertainty bands are narrow at low frequencies when the natural frequencies are well separated but become much more wide where the modal density is increasing. In these zones, the peaks also become broader due to the interactions of the modes of varying (random) natural frequencies and mode shapes. In these zones, i.e., for frequencies higher than 1100 Hz or so, the deterministic ROM would provide only one estimate of the response vs. the wide range of responses that can be expected from a physical panel. Accordingly, such a deterministic ROM should not be used above 1100 Hz as it would not be accurate. This frequency is thus set as the upper bound on the frequency range of interest. In this range, there are 33 linear modes of the panel, which will all be included in the nonlinear ROM basis.
For the construction of the duals, the first 4 symmetric modes (Modes 1, 3, 9, and 11) and the first 4 asymmetric modes (Modes 2, 4, 5, and 6) were selected to generate the required load cases (see Equations (3) and (10)). More specifically, the following 26 combinations of modes were considered: 1-1, 1-2, 1-3, 1-4, 1-5, 1-6, 1-9, 1-11, 2-2, 2-3, 2-4, 2-5, 2-6, 2-9, 2-11, 3-3, 3-4, 3-5, 3-6, 3-9, 3-11, 4-4, 4-5, 4-6, 4-9, and 4-11. For each combination, a set of 14 load factors were used to generate 14 force loadings of various magnitudes such that the maximum transverse displacement varies from 0.01 h to 4.0 h, where h is the thickness of the panel skin.
The usual procedure from that point on is to adopt all linear modes, then add on the dual modes one at a time from the residuals of the projections on all linear modes and prior duals of the 14 nonlinear static responses corresponding to each combination of linear modes considered. In this process, the first dual, i.e., the one associated with the dominant linear mode, is not coupled to just this mode but to all linear modes to which it was made orthogonal to by construction of the residuals. This property implies a broader coupling between duals and all linear modes than is physically expected, which, unfortunately, has been observed to be detrimental to the numerical stability of constructed ROMs with a large number of basis functions—as is the case for this panel. This issue is purely numerical and results from small inaccuracies in the identification of the large number of ROM coefficients.
A better approach proposed here is to construct first a “core reduced order model”, i.e., a ROM with only a few modes (linear and duals), that captures qualitatively the behavior of the panel but does not quite have the accuracy desired. This core ROM is then extended by adding sequentially linear modes and their associated duals as necessary. This process narrows the coupling between modes and has been found to enhance the identified ROM numerical stability.
For the current panel model, a core ROM including the 8 linear modes 1-6, 9, and 11 and 9 associated duals (i.e., ROM8L9D) resulting from the combinations of the basis functions 1-1, 1-3, 1-5, 2-4, 3-4, 3-5, 4-4, 2-8, 3-7 (1 dual each) was selected. The construction of the full ROM was then achieved by adding the linear modes 9-33 and, as necessary, their duals. The steps were specifically:
given the available core basis (8L9D), the remaining linear modes in the frequency range [0, 1100] Hz were first added to the core basis, yielding a 33L9D basis;
the residues of the nonlinear static response data corresponding to linear combinations of linear modes not involved in the core ROM dual modes were computed by making them orthogonal to the basis 33L9D;
the duals from the POD eigenvectors of these residues were selected and added to the 33L9D basis to obtain the modified full basis.
For the current panel model, the selection of duals gave rise to a full basis of 33 linear modes and 25 duals. The tangent stiffness matrix procedure was then used to identify the nonlinear stiffness coefficients of this full ROM (33L25D), as well as the core one (8L9D).
The representation errors of the data corresponding to the 26 linear combinations of Equations (3) and (10) are shown in
Table 6 for both 8L9D and 33L25D bases. Note in this table that the combinations with a * were used for the construction of the 9 duals of the core 8L9D model. For most of the combinations, the errors obtained with the 33L25D are below or about the typical threshold of 1% in all 3 directions, suggesting that this basis should be appropriate.
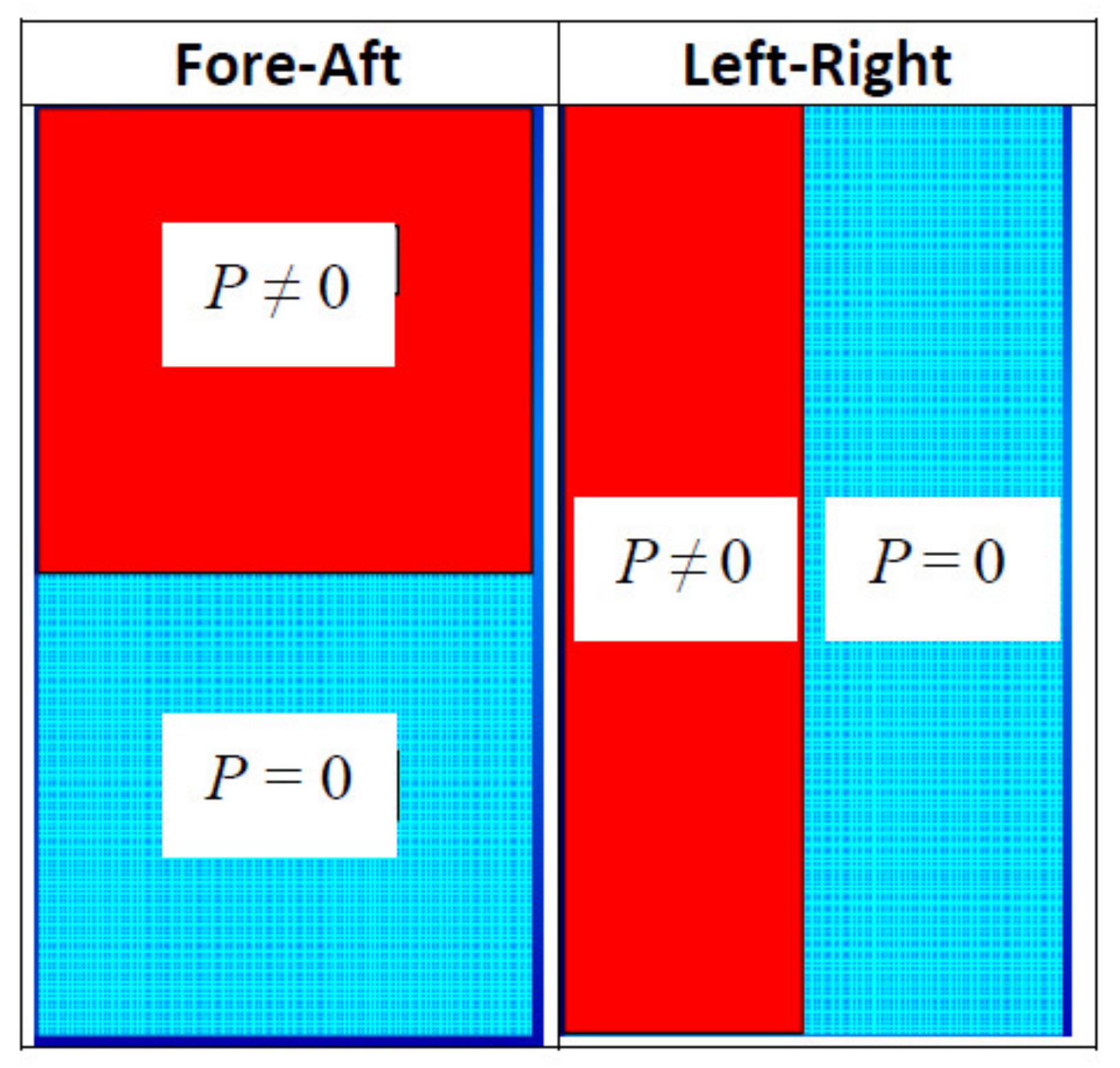
Nonlinear static validations were carried out for both the core (8L9D) and full (33L25D) ROMs by comparing several nonlinear static responses obtained from Nastran and their counterparts predicted by the ROMs. Three static pressure loadings of varying magnitude were considered for this effort: (1) a uniform pressure; (2) a pressure distribution asymmetric in the
y-direction (fore-aft) but symmetric in the
x-direction (left-right); and (3) a pressure distribution symmetric in the
y-direction (fore-aft) but asymmetric in the
x-direction (left-right). The last 2 pressure distributions are depicted in
Figure 12. All pressures were applied only to the top surface of the panel skin.
For the uniform pressure loading, the pressure was varied from −20 kPa to +20 kPa, with negative pressures applied toward the top surface. The maximum transverse displacements computed by Nastran are about five and six thicknesses, for the negative and the positive pressures, respectively.
Shown in
Figure 13 is the resulting comparison of the displacements obtained by Nastran and the two ROMs, at the center and a quarter point of the panel skin. Both ROMs predict transverse displacements very well, at both the center and the quarter point, with the full ROM slightly closer to Nastran. The predictions of in-plane displacements by the two ROMs also agree well to Nastran results. Note that the in-plane displacements of the center point are very small owing to the symmetry of the panel, and, thus, the comparison there is not particularly worthwhile.
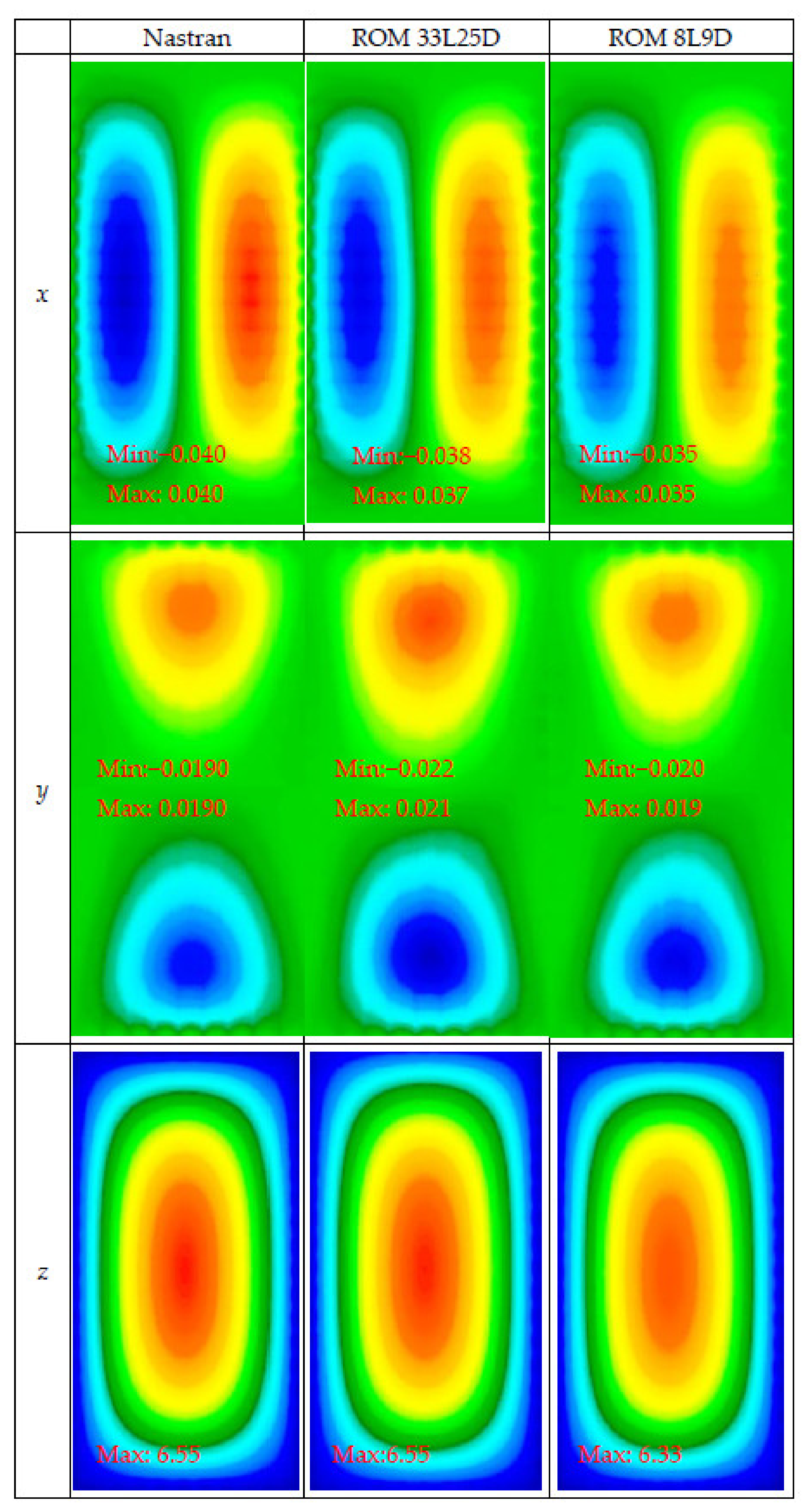
Figure 14 confirms these results by displaying the displacement fields along
x,
y, and
z of the skin at the highest load level of 20 kPa at which the peak transverse displacement is 4.4 thicknesses.
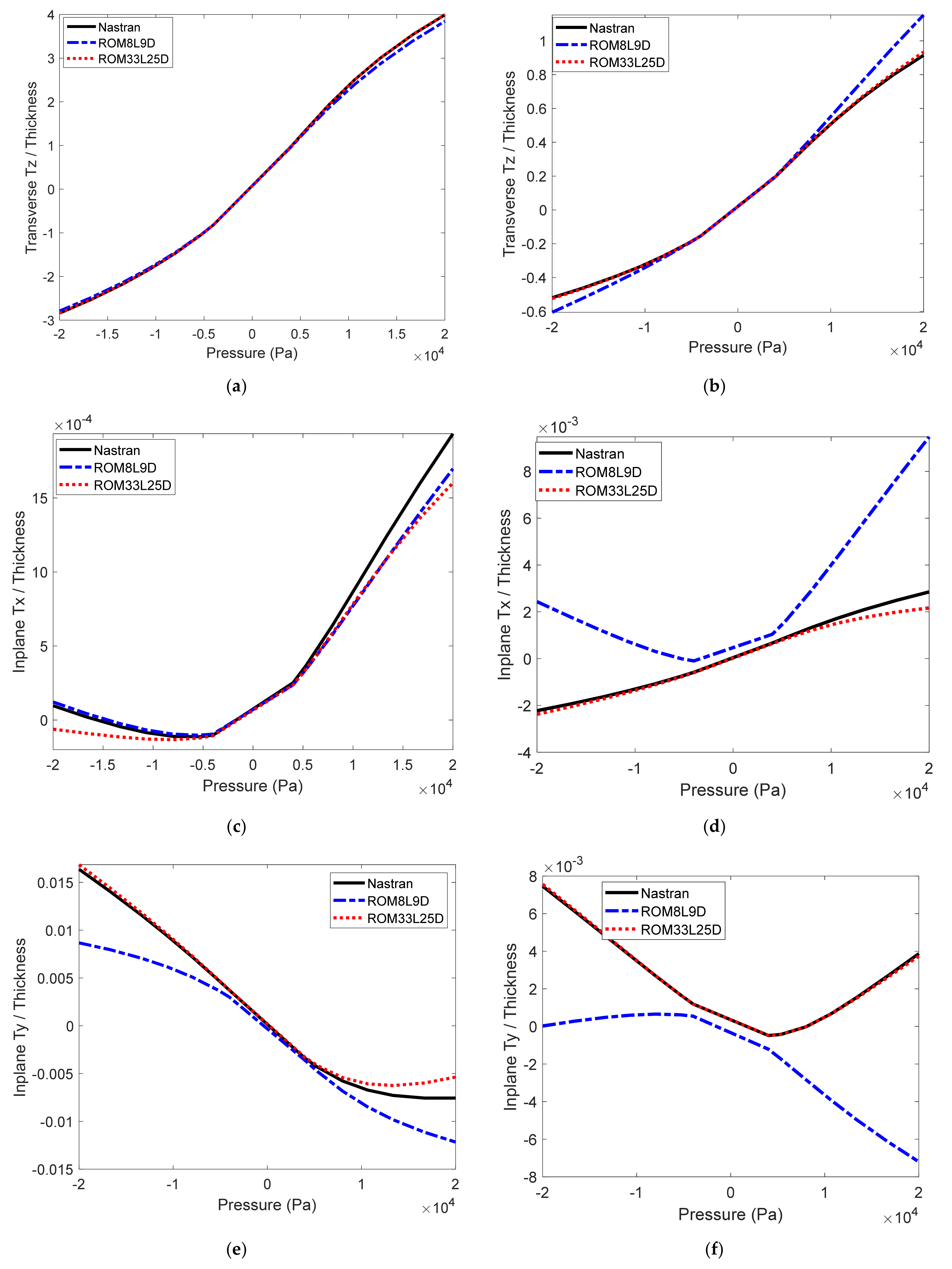
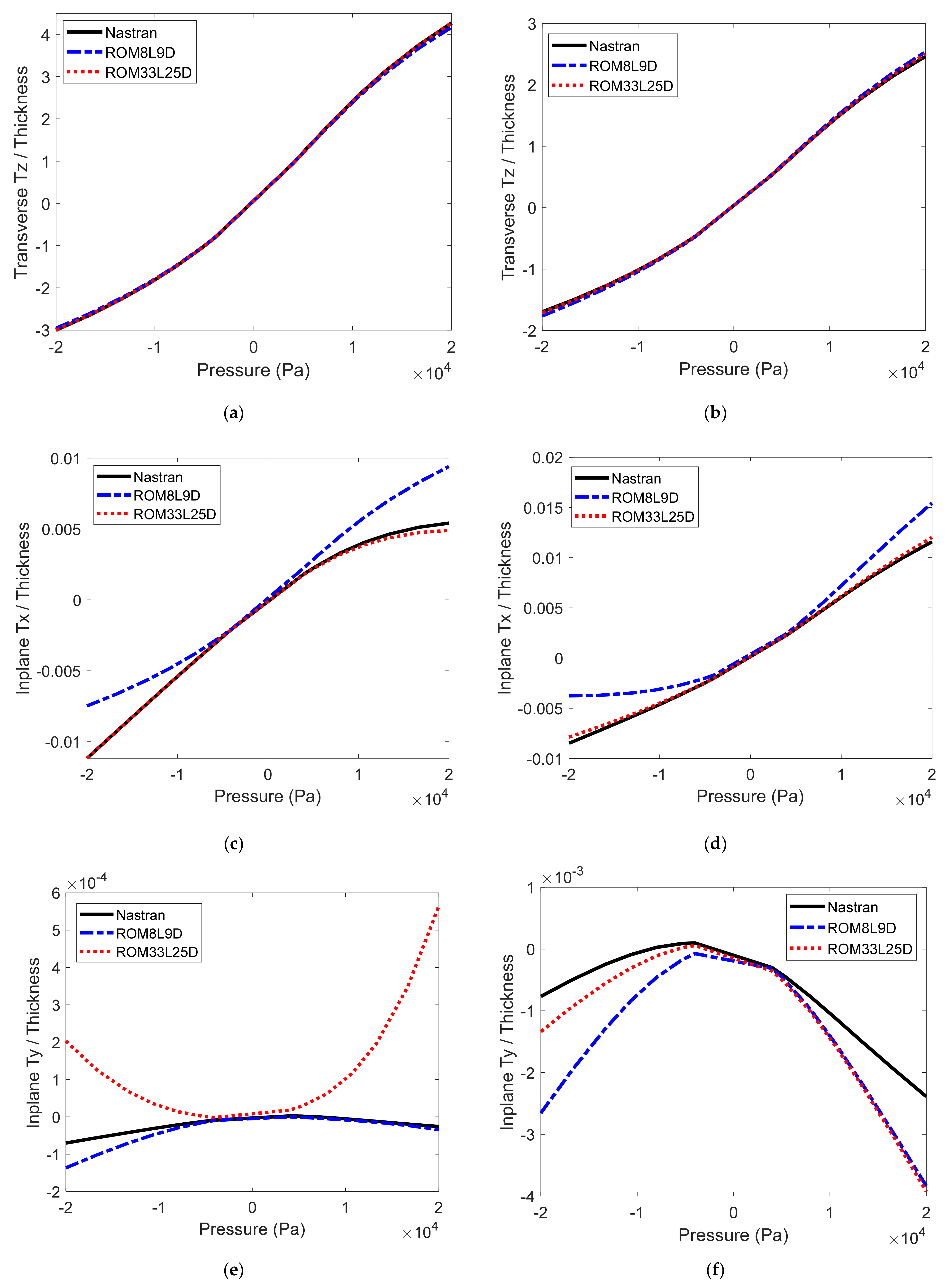
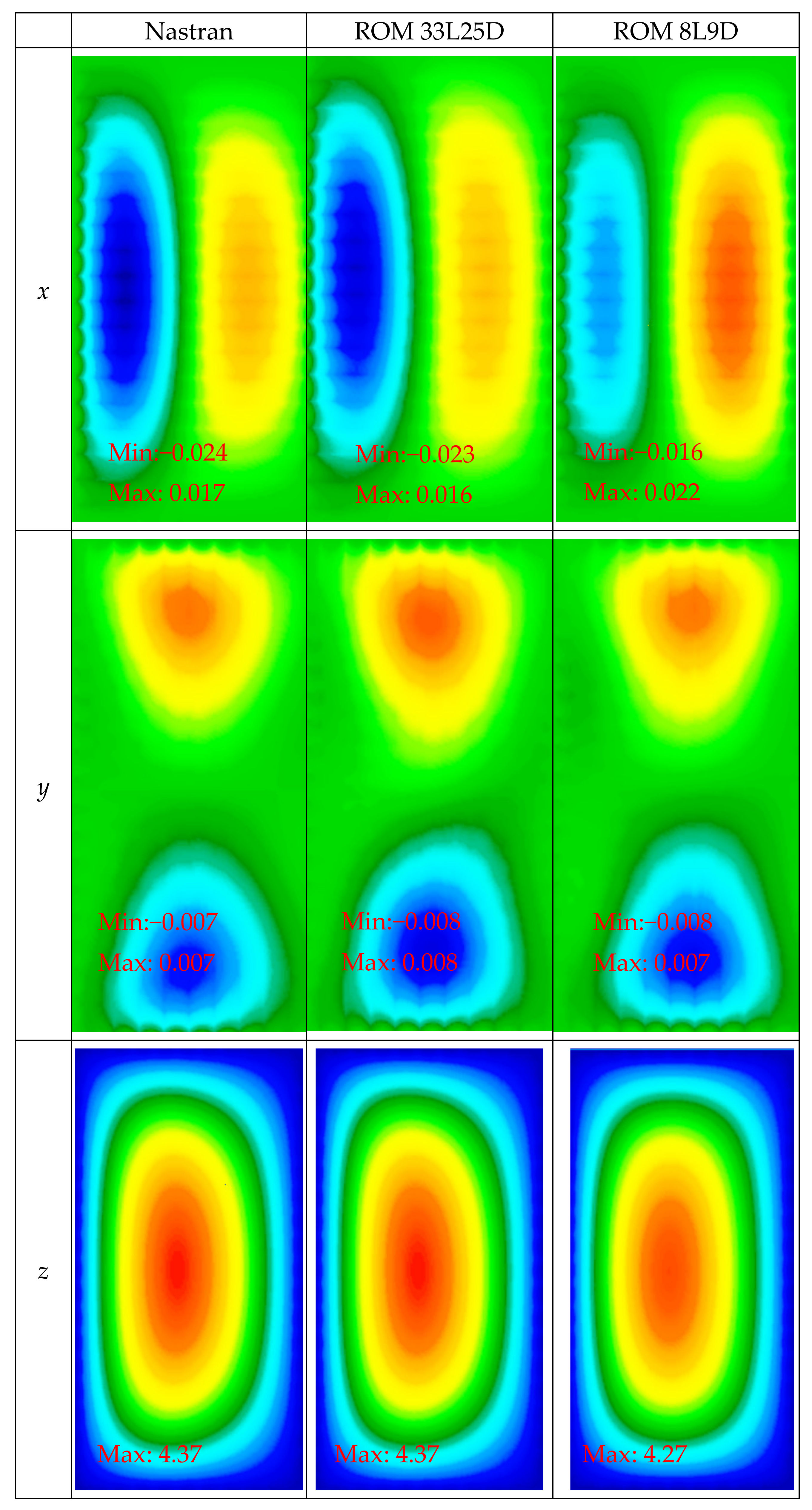
The above validation was repeated for the two asymmetric “split-uniform” pressure distributions of
Figure 12, and the corresponding predictions from Nastran and the ROMs are shown in
Figure 15,
Figure 16,
Figure 17 and
Figure 18. For these two asymmetric loadings, the 33L25D model still provides excellent predictions of the Nastran responses in all three directions, while the 8L9D model is primarily successful at predicting the transverse displacements with noticeably larger errors on the in-plane displacements.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}