A Multiprotocol Wireless Sensor Network for High Performance Sport Applications

 ,
,  and
and
Abstract
:1. Introduction
2. Materials and Methods
- Measurement of boat displacement and velocity by means of high frequency GPS (sampling frequency ≥ 10 Hz);
- Measurement of triaxial acceleration and triaxial angular velocity (sampling frequency ≥ 50 Hz);
- Measurement of force on the paddle and footrest of each athlete (sampling frequency ≥ 50 Hz);
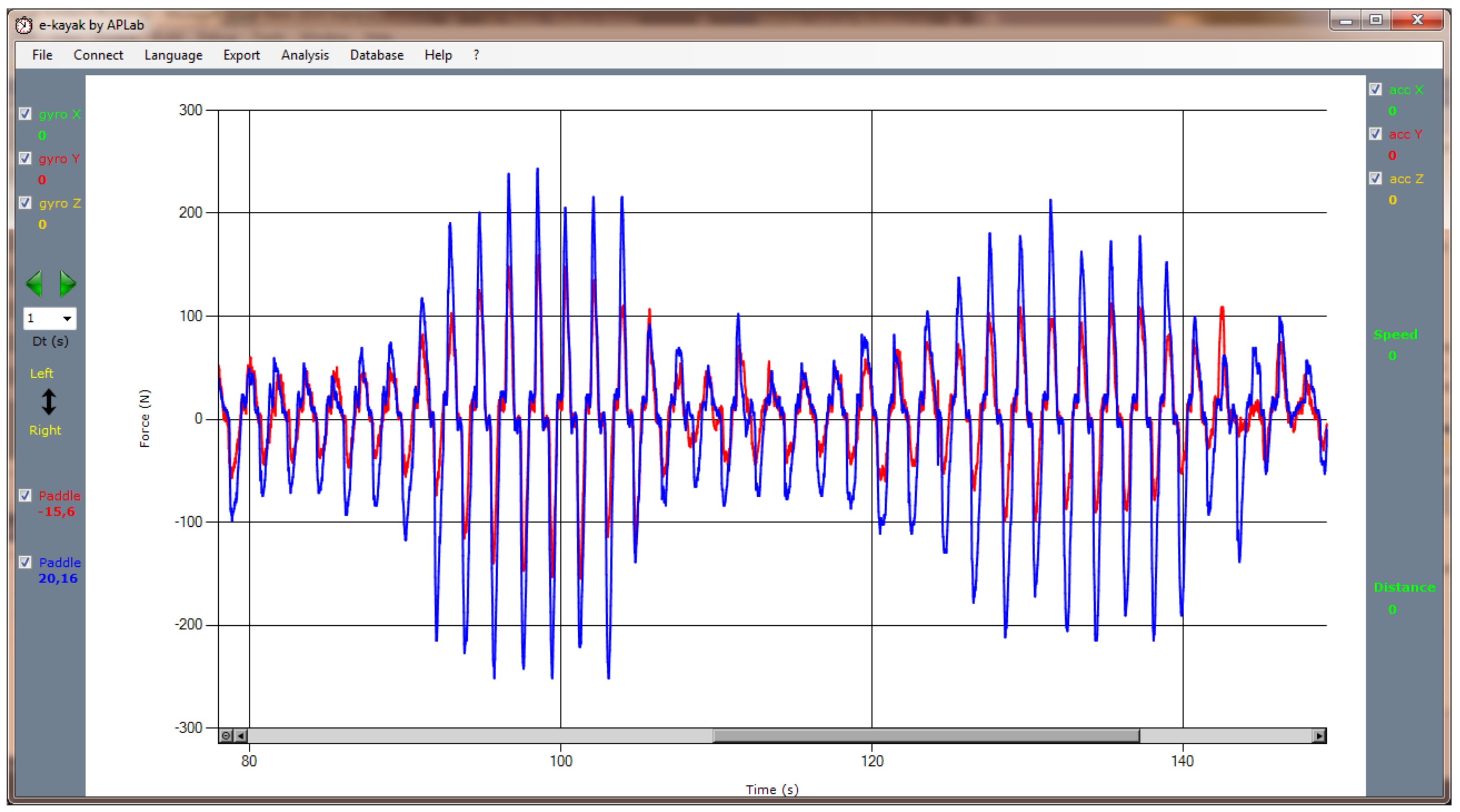
- Real-time visualization of speed and stroke frequency on athlete and coach terminals;
- Wireless data download and system diagnostics from any platform and OS (Windows, MAC iOS, Android);
- Battery time for all the master and slave nodes ≥2 h to acquire a whole training session without the need to recharge.
2.1. Choice of Radio Transmission Device
2.2. Choice of User Communication Protocol
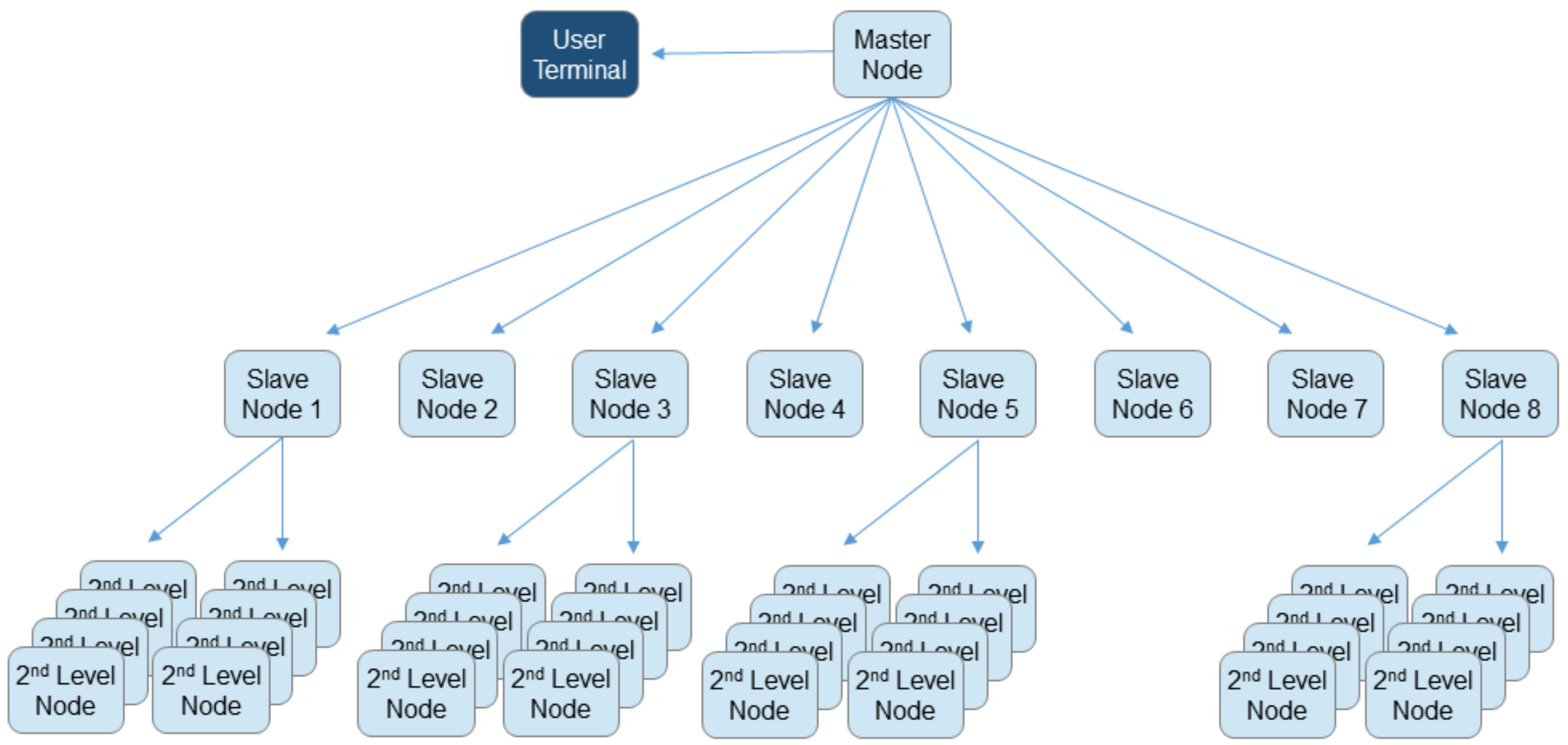
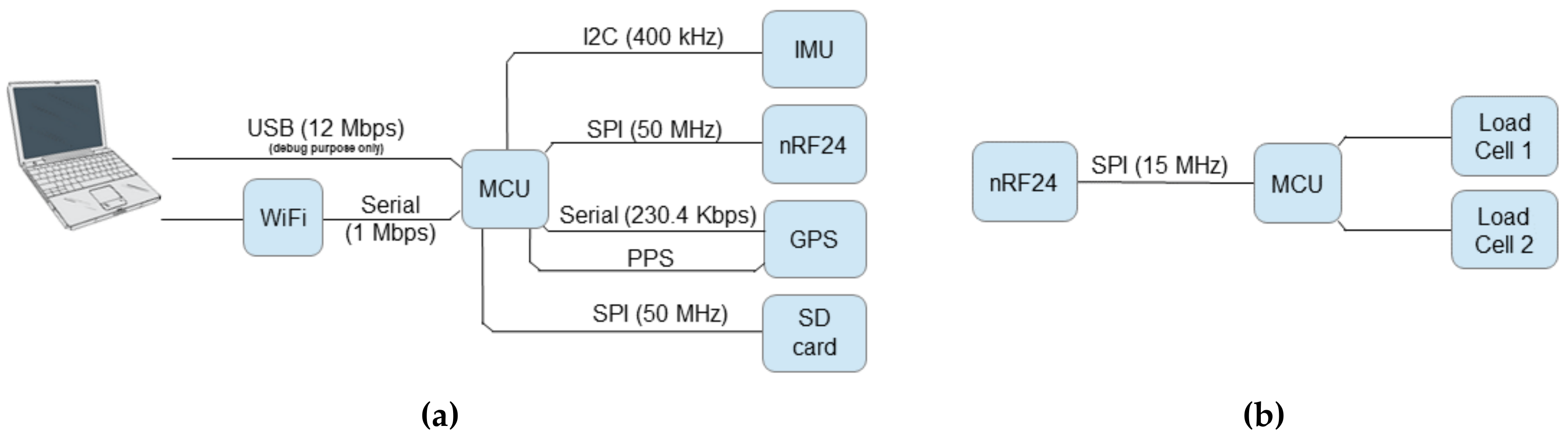
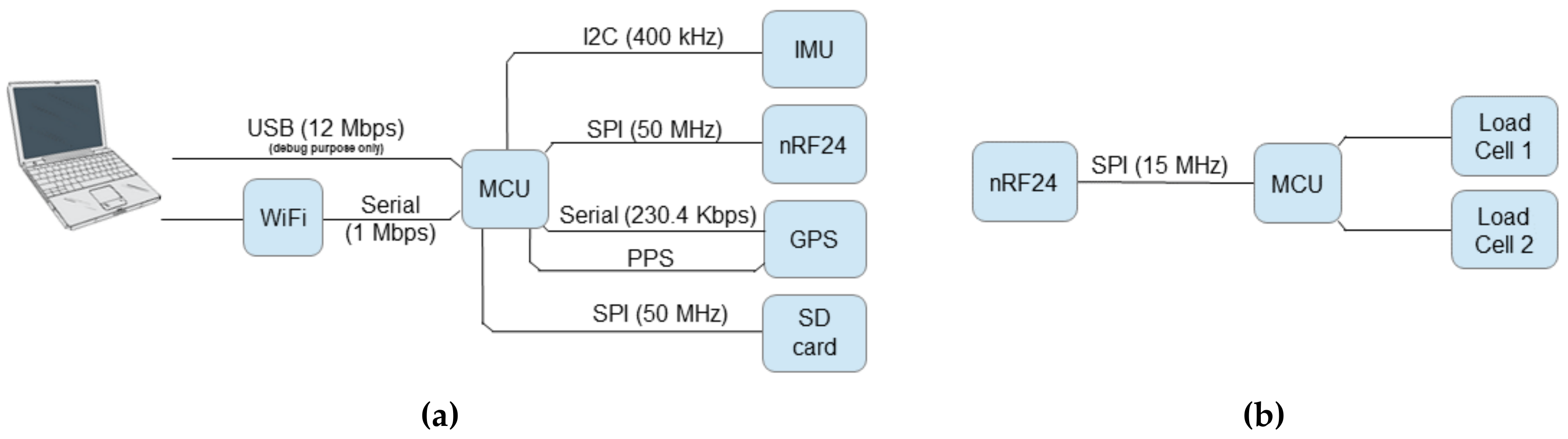
2.3. Design of the Master Node
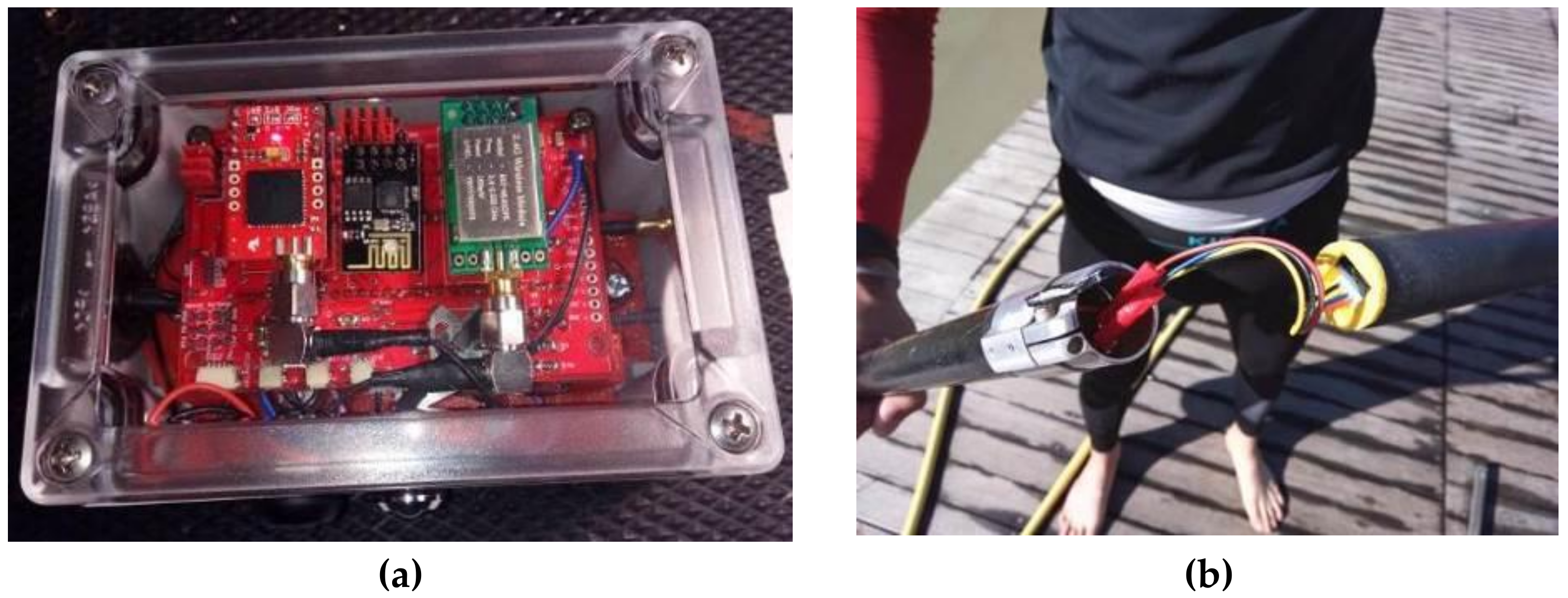
2.4. Design of the Slave Nodes
3. Results
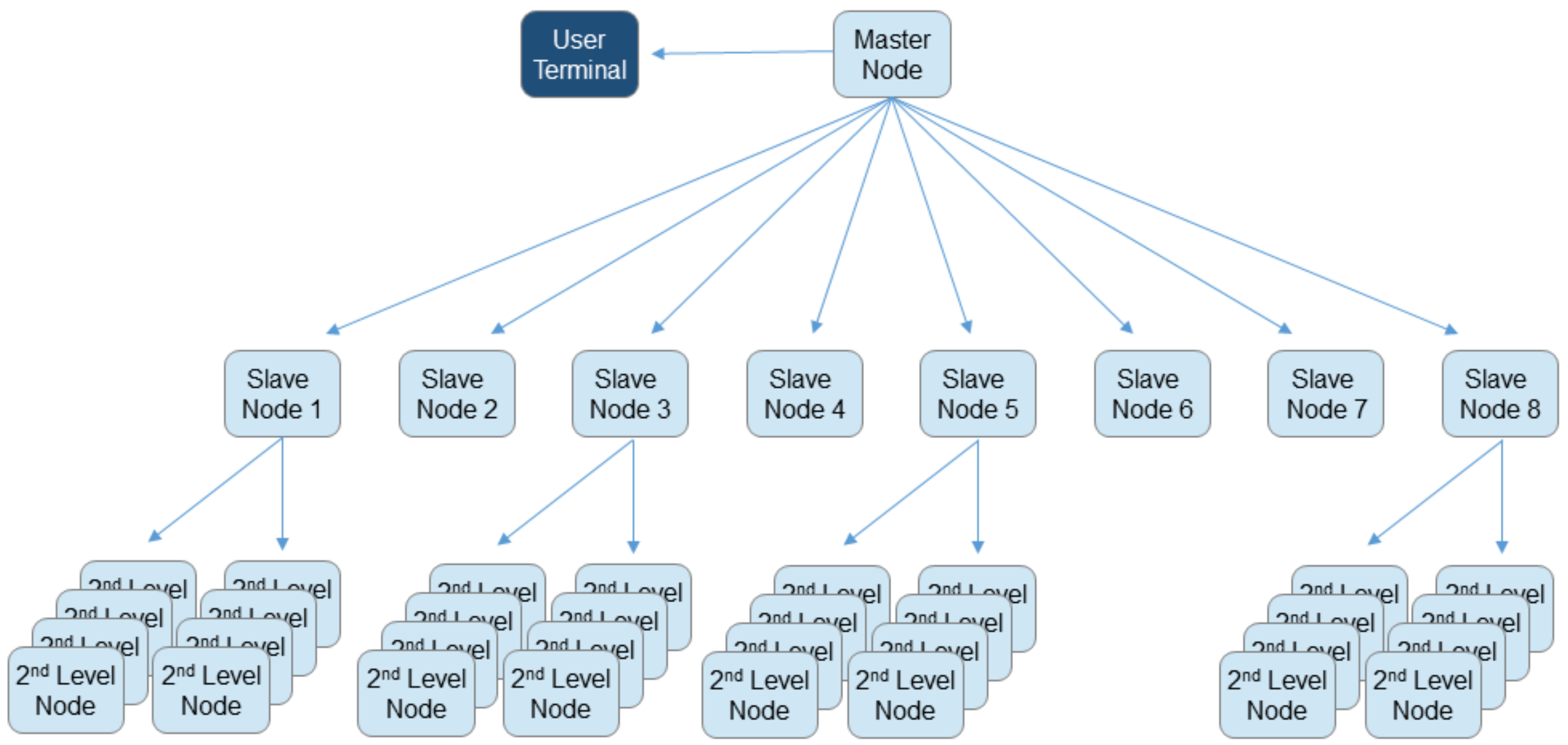
- High flexibility in number and type of employable sensors;
- Possibility to cover a wide sensor area by using second level Slave nodes;
- OS independent user interface represented by a simple web browser.
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Baca, A.; Dabnichki, P.; Heller, M.; Kornfeind, P. Ubiquitous computing in sports: A review and analysis. J. Sports Sci. 2009, 27, 1335–1346. [Google Scholar] [CrossRef] [PubMed]
- Baca, A.; Kornfeind, P. Rapid feedback systems for elite sports training. IEEE Pervas. Comput. 2006, 5, 70–76. [Google Scholar] [CrossRef]
- Wei, Y.U.; Fei, Q.; He, L. Sports motion analysis based on mobile sensing technology. In Proceedings of the International Conference on Global Economy, Finance and Humanities Research (GEFHR 2014), Tianjin, China, 27–28 March 2014. [Google Scholar] [CrossRef]
- Ermes, M.; Pärkkä, J.; Mäntyjärvi, J.; Korhonen, I. Detection of daily activities and sports with wearable sensors in controlled and uncontrolled conditions. IEEE Trans. Inf. Technol. Biomed. 2008, 12, 20–26. [Google Scholar] [CrossRef] [PubMed]
- Iosa, M.; Picerno, P.; Paolucci, S.; Morone, G. Wearable inertial sensors for human movement analysis. Expert Rev. Med. Dev. 2016, 13, 641–659. [Google Scholar] [CrossRef] [PubMed]
- Avci, A.; Bosch, S.; Marin-Perianu, M.; Marin-Perianu, R.; Havinga, P. Activity recognition using inertial sensing for healthcare, wellbeing and sports applications: A survey. In Proceedings of the 23rd International Conference on Architecture of computing systems (ARCS 2010), Hannover, Germany, 22–25 February 2010. [Google Scholar]
- Camomilla, V.; Bergamini, E.; Fantozzi, S.; Vannozzi, G. Trends supporting the in-field use of wearable inertial sensors for sport performance evaluation: A systematic review. Sensors 2018, 18, 873. [Google Scholar] [CrossRef] [PubMed]
- Umek, A.; Kos, A. Wearable sensors and smart equipment for feedback in watersports. Procedia Comput. Sci. 2018, 129, 496–502. [Google Scholar] [CrossRef]
- Bonaiuto, V.; Lanotte, N.; Romagnoli, C.; Silvaggi, N.; Annino, G. Design of a Wireless Wearable DAQ System for the Evaluation of Sports Performances. Proceedings 2018, 2, 290. [Google Scholar] [CrossRef]
- Song, E.Y.; Lee, K.B. IEEE 1451.5 Standard-Based Wireless Sensor Networks. In Advances in Wireless Sensors and Sensor Networks; Mukhopadhyay, S.C., Leung, H., Eds.; Lecture Notes in Electrical Engineering, Vol. 64; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar] [CrossRef]
- Gharghan, S.K.; Nordin, R.; Ismail, M. An ultra-low power wireless sensor network for bicycle torque performance measurements. Sensors 2015, 15, 11741–11768. [Google Scholar] [CrossRef] [PubMed]
- Arefin, M.T.; Ali, M.H.; Haque, A.F. Wireless Body Area Network: An Overview and Various Applications. J. Comput. Commun. 2017, 5, 53. [Google Scholar] [CrossRef]
- Dhamdhere, A.; Chen, H.; Kurusingal, A.; Sivaraman, V.; Burdett, A. Experiments with wireless sensor networks for real-time athlete monitoring. In Proceedings of the IEEE 35th Conference on Local Computer Networks (LCN 2010), Denver, CO, USA, 10-14 October 2010; pp. 938–945. [Google Scholar] [CrossRef]
- Mukhopadhyay, S.C. Wearable sensors for human activity monitoring: A review. IEEE Sensors J. 2015, 15, 1321–1330. [Google Scholar] [CrossRef]
- Armstrong, S. Wireless connectivity for health and sports monitoring: a review. Br. J. Sports Med. 2007, 41, 285–289. [Google Scholar] [CrossRef] [PubMed]
- Lapinski, M.; Berkson, E.; Gill, T.; Reinold, M.; Paradiso, J.A. A Distributed Wearable, Wireless Sensor System for Evaluating Professional. In Proceedings of the 2009 International Symposium on Wearable Computers, Linz, Austria, 4–7 September 2009. [Google Scholar] [CrossRef]
- Gyselinckx, B.; Van Hoof, C.; Ryckaert, J.; Yazicioglu, R.F.; Fiorini, P.; Leonov, V. Human++: autonomous wireless sensors for body area networks. In Proceedings of the IEEE 2005 Custom Integrated Circuits Conference, San Jose, CA, USA, 21 September 2005; pp. 13–19. [Google Scholar] [CrossRef]
- Bräysy, V.; Hurme, J.; Teppo, H.; Korpela, T.; Karjalainen, M. Movement tracking of sports team players with wireless sensor network. In Proceedings of the 2010 Ubiquitous Positioning Indoor Navigation and Location Based Service (UPINLBS 2010), Kirkkonummi, Finland, 14–15 October 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Watthanawisuth, N.; Lomas, T.; Wisitsoraat, A.; Tuantranont, A. Wireless wearable pulse oximeter for health monitoring using ZigBee wireless sensor network. In Proceedings of the 2010 ECTI International Confernce on Electrical Engineering/Electronics, Telecommunications and Information Technology (ECTI-CON 2010), Computer, Chiang Mai, Thailand, 19–21 May 2010; pp. 575–579. [Google Scholar]
- Ali, B.B.; Dugas, É.; Naceur, A.; Romdhani, I. A new Zigbee-based device for measuring visual reaction time in sport activities. In Proceedings of the 2017 International Conference on Engineering & MIS (ICEMIS 2017), Monastir, Tunisia, 8–10 May 2017. [Google Scholar] [CrossRef]
- Zulkifli, N.S.A.; Harun, F.C.; Azahar, N.S. XBee wireless sensor networks for Heart Rate Monitoring in sport training. In Proceedings of the 2012 International Conference on Biomedical Engineering (ICoBE 2012), Penang, Malaysia, 27–28 February 2012; pp. 441–444. [Google Scholar] [CrossRef]
- Dynastream Innovations Inc. ANT message protocol and usage. Rev. 4.5. 2011. Available online: http://thisisant.com (accessed on 18 December 2018).
- Weghorn, H. Efforts in developing android smartphone sports and healthcare apps based on Bluetooth low energy and ANT+ communication standards. In Proceedings of the 2015 15th International Conference on Innovations for Community Services (I4CS 2015), Nuremberg, Germany, 8–10 July 2015. [Google Scholar] [CrossRef]
- Bluetooth SIG, Inc. Specifications: The building blocks of all Bluetooth devices. 2018. Available online: www.bluetooth.com/specifications (accessed on 18 December 2018).
- Higgins, J.P. Smartphone applications for patients’ health and fitness. Am. J. Med. 2016, 129, 11–19. [Google Scholar] [CrossRef] [PubMed]
- Android v iOS market share 2018. 16 October 2018. Available online: https://deviceatlas.com/blog/android-v-ios-market-share (accessed on 18 December 2018).
- Gravina, R.; Alinia, P.; Ghasemzadeh, H.; Fortino, G. Multi-sensor fusion in body sensor networks: State-of-the-art and research challenges. Inf. Fusion 2017, 35, 68–80. [Google Scholar] [CrossRef]
- Sharma, S.; Tripathi, M.M.; Mishra, V.M. Survey paper on sensors for body area network in health care. In Proceedings of the International Conference on Emerging Trends in Computing and Communication Technologies (ICETCCT), Dehradun, India, 17–18 November 2017. [Google Scholar] [CrossRef]
- Gratton, D.A. The Handbook of Personal Area Networking Technologies and Protocols; Cambridge University Press: Cambridge, UK, 2013; ISBN 978-0-521-19726-7. [Google Scholar]
- Codeluppi, R.; Golfarelli, A.; Rossetti, A.; Proli, P.; Talamelli, A.; Tartagni, M. A sensor network for real-time windsail aerodynamic control. In Proceedings of the ELMAR-2010, Zadar, Croatia, 15–17 September 2010; pp. 341–344. [Google Scholar]
- Bifaretti, S.; Bonaiuto, V.; Federici, L.; Gabrieli, M.; Lanotte, N. E-kayak: a wireless DAQ system for real time performance analysis. Procedia Eng. 2016, 147, 776–780. [Google Scholar] [CrossRef]
- 24 GHz RF System-on-Chip, Transceivers and Audio Streamer. Available online: www.nordicsemi.com/eng/Products/2.4GHz-RF/nRF24L01 (accessed on 18 December 2018).
- Lanotte, N.; Annino, G.; Bifaretti, S.; Gatta, G.; Romagnoli, C.; Salvucci, A.; Bonaiuto, V. A New Device for Propulsion Analysis in Swimming. Proceedings 2018, 2, 285. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Standard | Max TX Range1 | Max Data Rate | Application Throughput | Band | Application | Topology | |
|---|---|---|---|---|---|---|---|
| ZigBee | IEEE 802.15.4 | 100 m | 500 kbps | 35.0 kbps | 2.4 GHz | Wireless Sensors | Star, Mesh |
| Z-Wave | Proprietary | 100 m | 100 kbps | 6 kbps | 900 MHz 2.4 GHz | Wireless Sensors | Mesh |
| ANT+ | Proprietary | 30 m | 60 kbps | 260kbps | 2.4 GHz | Wireless Sensors | Star, Tree, P2P, Mesh |
| Bluetooth | IEEE 802.15.1 | 10 m | 1–3 Mbps | 2.1Mbps | 2.4 GHz | Wireless Sensors | P2P, Star |
| Bluetooth 4.0 LE | IEEE 802.15.1 | 100 m | 2 Mbps | 305 kbps | 2.4 GHz | Wireless Sensors | P2P, Mesh, Star, Broadcast |
| Bluetooth 5.0 LE | IEEE 802.15.1 | 400 m | 2 Mbps | 1360 kbps | 2.4 GHz | Wireless Sensors | P2P, Mesh, Star, Broadcast |
| Wi-Fi | IEEE 802.11a WLAN | 5 km | 54 Mbps | 20 Mbps | 5 GHz | PC based data acquisition | Star, Tree, P2P |
| Wi-Fi 4 | IEEE 802.11n | 250 m | 600 Mbps | 72 Mbps | 2.4 GHz | PC based data acquisition | Star, Tree, P2P |
| WiMAX | IEEE 802.16 WWAN | 15 km | 75 Mbps | 4–8 Mbps | 2.3-5.8 GHz | MobileInternet | Star, Tree, P2P |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bonaiuto, V.; Boatto, P.; Lanotte, N.; Romagnoli, C.; Annino, G. A Multiprotocol Wireless Sensor Network for High Performance Sport Applications. Appl. Syst. Innov. 2018, 1, 52. https://doi.org/10.3390/asi1040052
Bonaiuto V, Boatto P, Lanotte N, Romagnoli C, Annino G. A Multiprotocol Wireless Sensor Network for High Performance Sport Applications. Applied System Innovation. 2018; 1(4):52. https://doi.org/10.3390/asi1040052
Chicago/Turabian StyleBonaiuto, Vincenzo, Paolo Boatto, Nunzio Lanotte, Cristian Romagnoli, and Giuseppe Annino. 2018. "A Multiprotocol Wireless Sensor Network for High Performance Sport Applications" Applied System Innovation 1, no. 4: 52. https://doi.org/10.3390/asi1040052
APA StyleBonaiuto, V., Boatto, P., Lanotte, N., Romagnoli, C., & Annino, G. (2018). A Multiprotocol Wireless Sensor Network for High Performance Sport Applications. Applied System Innovation, 1(4), 52. https://doi.org/10.3390/asi1040052