Closed-Form Expressions for Contact Angle Hysteresis: Capillary Bridges between Parallel Platens



Abstract

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Theory
2.1. The Toroidal Approximation
2.2. Contact Angle Hysteresis
- 1)
- When the platen moves downwards and the gap decreases, initially, the contact line remains stationary until the contact angle equals the advancing contact angle (see Figure 5a). This is known as pinning.
- 2)
- If the gap decreases further, the contact angle remains at the advancing angle and the contact line expands (see Figure 5b). This is known as slipping.
- 3)
- When the gap increases, the contact angle first decreases while the contact line remains constant (pins—see Figure 5c).
- 4)
- When the contact angle reaches the receding angle, provided the gap is still increasing, it will remain at that angle while the contact line declines (slips—see Figure 5d). And so on.
- State initial conditions
- We need to know four things: gap, initial contact angle, contact line radius, and volume.
- Gap is a design/experimental parameter and is known, equilibrium (and dynamic for later) contact angle is a fluid property and can be found easily beforehand.
- The volume or the contact line radius needs to be measured. The other can be calculated using Equations (6) or (8), respectively. However, they only need to be measured once. The values can then be used throughout the calculation.
- Change the gap
- It is assumed that subsequent motion will be continuous and no relaxation towards equilibrium conditions is observed.
- The change in geometry depends on the direction the upper platen is moved.
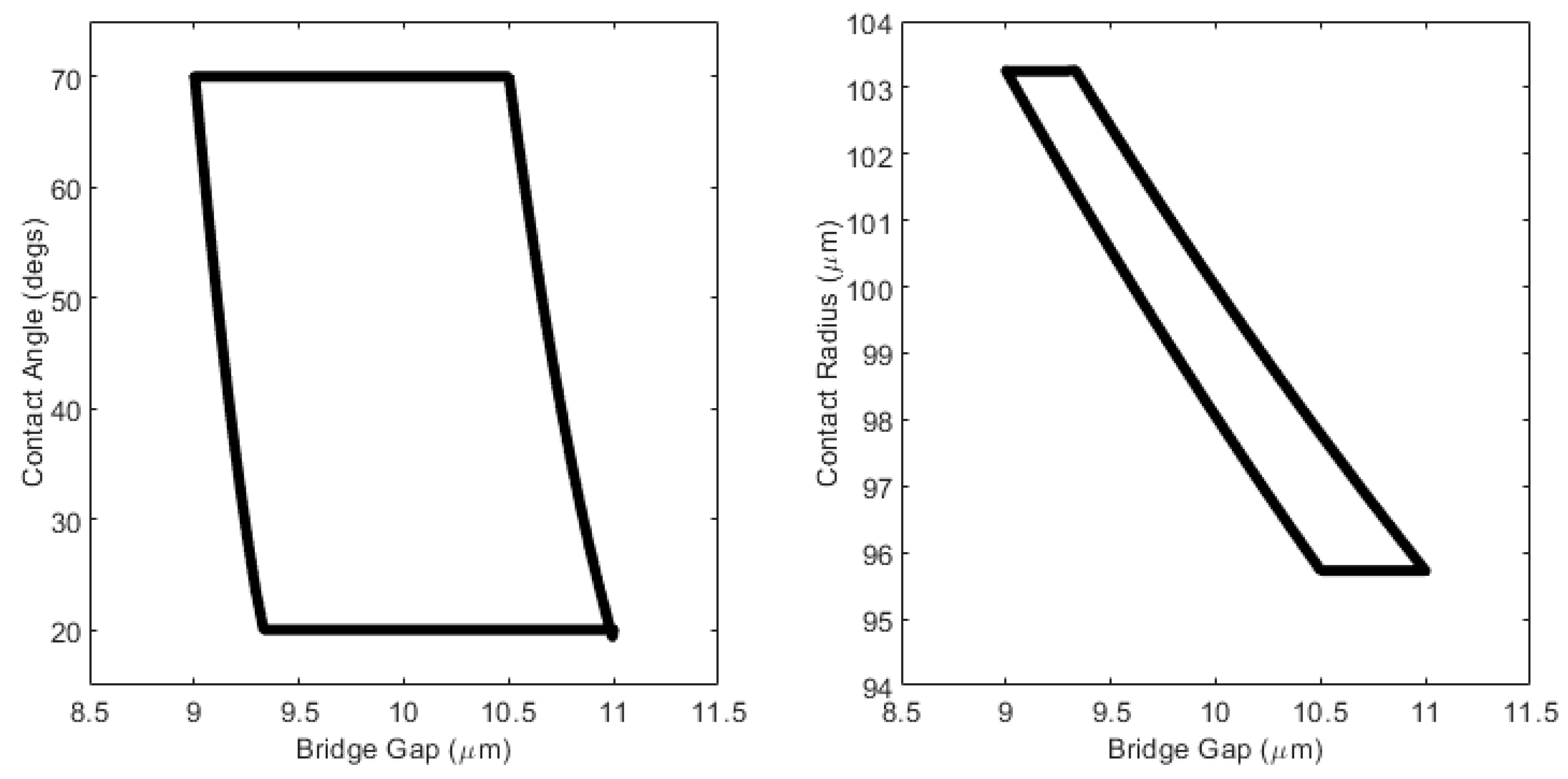
- If it is moving upwards, initially, the receding contact angle will be lower than the equilibrium contact angle. Here, the contact line radius (given) will stay constant until the instantaneous contact angle (given by Equation (16)) equals the receding contact angle. If the motion continues to increase, the contact angle stays constant and the contact line radius changes according to Equation (8).
- Change the direction
- At this point, the contact angle equals the receding contact angle and the contact line radius is known. Decreasing the gap, the contact line radius will remain constant and the contact angle will increase, as in Equation (16), until it reaches the advancing contact angle. Decreasing the gap further will mean the contact angle stays at the advancing angle and the contact line radius changes.

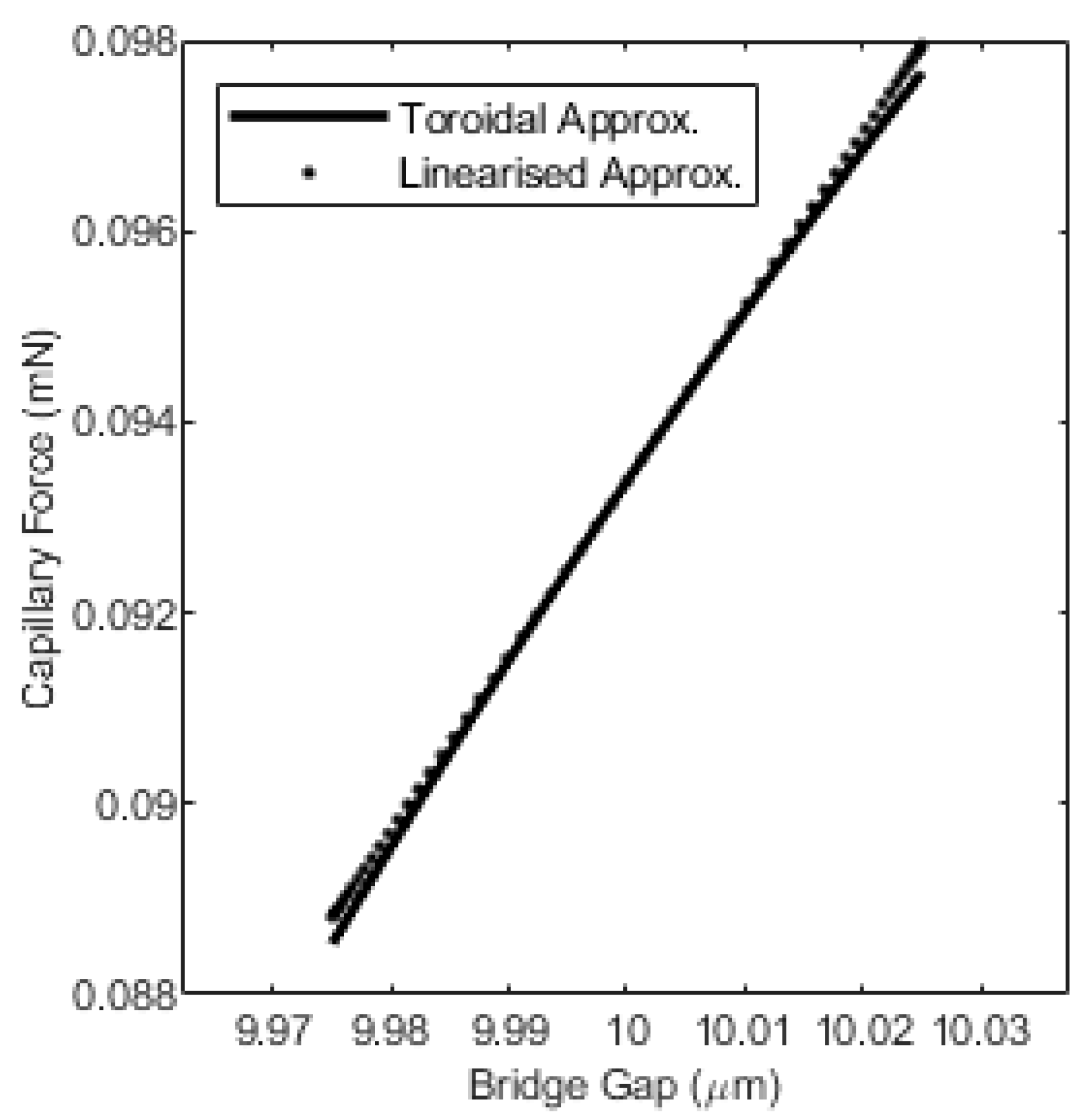
2.3. Linearization and Applicability to Squeeze Flow Rheometry
3. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A


References
- Fowkes, F.M. Calculation of Work of Adhesion by Pair Potential Summatio. J. Colloid Int Sci. 1968, 28, 493–505. [Google Scholar] [CrossRef]
- Allen, K.W. “At Forty Cometh Understanding”: A Review of Some Basics of Adhesion over the Past Four Decades. Int. J. Adhes. Adhes. 2003, 23, 87–93. [Google Scholar] [CrossRef]
- Ennis, B.J.; Li, J.; Tardos, G.I.; Pfeffer, R. The Influence of Viscosity on the Strength of an Axially Strained Pendular Liquid Bridge. Chem. Eng. Sci. 1990, 45, 3071–3088. [Google Scholar] [CrossRef]
- Simons, S.J.R.; Seville, J.P.K.; Adams, M.J. An Analysis of the Rupture Energy of Pendular Liquid Bridges. Chem. Eng. Sci. 1994, 49, 2331–2339. [Google Scholar] [CrossRef]
- Rabinovich, Y.I.; Esayanur, M.S.; Moudgil, B.M. Capillary Forces between Two Spheres with a fixed Volume Liquid Bridge.: Theory and Experiment. Langmuir 2005, 21, 10992–10997. [Google Scholar] [CrossRef] [PubMed]
- Lian, G.; Thornton, C.; Adams, M.J. A Theoretical Study of the Liquid Bridge Forces between Two Rigid Spherical Bodies. J. Colloid Int. Sci. 1993, 161, 138–147. [Google Scholar] [CrossRef]
- Willett, C.D.; Adams, M.J.; Johnson, S.A.; Seville, J.P.K. Capillary Bridges between Two Spherical Bodies. Langmuir 2000, 16, 9396–9405. [Google Scholar] [CrossRef]
- Pepin, X.; Rossetti, D.; Iveson, S.M.; Simons, S.J. Modelling the Evolution and Rupture of Pendular Liquid Bridges in the Presence of Large Wetting Hysteresis. J. Colloid Int. Sci. 2000, 232, 289–297. [Google Scholar] [CrossRef]
- De Bisschop, F.R.E.; Rigole, W.J.L. A Physical Model for Liquid Capillary Bridges between Adsorptive Solid Spheres: The Nodoid of Plateau. J. Colloid Int. Sci. 1981, 88, 117–128. [Google Scholar] [CrossRef]
- Orr, F.M.; Scriven, L.E.; Rivas, A.P. Pendular Rings between Solids: Meniscus Properties and Capillary Force. J. Fluid Mech. 1975, 67, 723–742. [Google Scholar] [CrossRef]
- de Boer, M.P.; de Boer, P.C.T. Thermodynamics of Capillary Adhesion between Rough Surfaces. J. Colloid Int. Sci. 2007, 311, 171–185. [Google Scholar] [CrossRef] [PubMed]
- Lambert, P.; Delchambre, A. Parameters Ruling Capillary Forces at the Submillimetric Scale. Langmuir 2005, 21, 9537–9543. [Google Scholar] [CrossRef] [PubMed]
- Mastrangelo, C.H.; Hsu, C.H. Mechanical Stability and Adhesion of Microstructures under Capillary Forces: I. Basic Theory. 1993, 2, 33–43. [Google Scholar] [CrossRef]
- Mastrangelo, C.H.; Hsu, C.H. Mechanical Stability and Adhesion of Microstructures under Capillary Forces: II. Basic Theory 1993, 2, 44–55. [Google Scholar] [CrossRef]
- Mate, C.M. Application of Disjoining and Capillary Pressure to Liquid Lubricant Films in Magnetic Recording. J. Appl. Phys. 1992, 72, 3084–3090. [Google Scholar] [CrossRef]
- Pfohl, T.; Mugele, F.; Seemann, R.; Herminghaus, S. Trends in Microfluidics with Complex Fluids. Chem. Phys. Chem. 2003, 4, 1291–1298. [Google Scholar] [CrossRef]
- Bell, D.; Binding, D.M.; Walters, K. The Oscillatory Squeeze Flow Rheometer - Comprehensive Theory and a New Experimental Facility. Rheol. Acta 2005, 46, 111–121. [Google Scholar] [CrossRef]
- Debbaut, B.; Thomas, K. Simulation and Analysis of Oscillatory Squeeze Flow. J. Non-Newton. Fluid Mech. 2004, 124, 77–91. [Google Scholar] [CrossRef]
- Kwok, P.Y.; Weinberg, M.S.; Breuer, K.S. Fluid Effects in Vibrating Micromachined Structures. J. Microelectromech. Syst. 2005, 14, 770–781. [Google Scholar] [CrossRef]
- Cheneler, D.; Bowen, J.; Ward, M.C.; Adams, M.J. Principles of a micro squeeze flow rheometer for the analysis of extremely small volumes of liquid. J. Micromech. Microeng. 2011, 21, 045030. [Google Scholar] [CrossRef]
- Cheneler, D. Analysis of a Coupled-Mass Microrheometer. In Advances in Microfluidics; IntechOpen: London, UK, 2012; p. 55. [Google Scholar]
- Yan, Y.; Zhang, Z.; Cheneler, D.; Stokes, J.R.; Adams, M.J. The influence of flow confinement on the rheological properties of complex fluids. Rheol. Acta 2010, 49, 255–266. [Google Scholar] [CrossRef]
- Chen, T.-Y.; Tsamopoulos, J.A.; Good, R.J. Capillary Bridges between Parallel and Non-Parallel Surfaces and Their Stability. J. Colloid Int. Sci. 1992, 151, 49–69. [Google Scholar] [CrossRef]
- Boucher, E.A.; Evans, M.J.B.; McGarry, S. Capillary Phenomena XX. Fluid Bridges between Horizontal Solid Plates in a Gravitation Field. J. Colloid Int. Sci. 1982, 89, 154–163. [Google Scholar] [CrossRef]
- Concus, P.; Finn, R. Discontinuous Behaviour of Liquids between Parallel and Tilted Plates. Phys. Fluids 1998, 10, 39–44. [Google Scholar] [CrossRef][Green Version]
- De Souza, E.J.; Gao, L.; McCarthy, T.J.; Arzt, E.; Crosby, A.J. Effect of contact angle hysteresis on the measurement of capillary forces. Langmuir 2008, 24, 1391–1396. [Google Scholar] [CrossRef]
- Shi, Z.; Zhang, Y.; Liu, M.; Hanaor, D.A.; Gan, Y. Dynamic contact angle hysteresis in liquid bridges. Colloids Surf. A Physicochem. Eng. Asp. 2018, 555, 365–371. [Google Scholar] [CrossRef]
- Reynolds, O. On the Theory of Lubrication and Its Application to Mr. Beauchamp Tower’s Experiments, Including an Experimental Determination of the Viscosity of Olive Oil. Philos. Trans. R. Soc. Lond. 1886, 177, 157–234. [Google Scholar]
- Borkar, A.; Tsamopoulos, J. Boundary-Layer Analysis of the Dynamics of Axisymmetric Capillary Bridges. Phys. Fluids A 1991, 3, 2866–2874. [Google Scholar] [CrossRef]
- Cheneler, D.; Ward, M.C.; Adams, M.J.; Zhang, Z. Measurement of Dynamic Properties of Small Volumes of Fluid Using MEMS. Sens. Actuators B Chem. 2008, 130, 701–706. [Google Scholar] [CrossRef]
- Neumann, A.W.; David, R.; Zuo, Y. Applied Surface Thermodynamics (Surfactant Science); CRC Press: New York, NY, USA, 1996; Volume 63. [Google Scholar]
- Van Honschoten, J.W.; Tas, N.R.; Elwenspoek, M. The Profile of a Capillary Liquid Bridge Between Solid Surfaces. Am. J. Phys. 2010, 78, 277–286. [Google Scholar] [CrossRef]
- Fisher, R.A. On the Capillary Forces in an Ideal Soil; Correction of Formulae given by WB Haines. J. Agric. Sci. 1926, 19, 492–505. [Google Scholar] [CrossRef]
- Megias-Alguacil, D.; Gauckler, L.J. Accuracy of the toroidal approximation for the calculus of concave and convex liquid bridges between particles. Granular Matter. 2011, 13, 487–492. [Google Scholar] [CrossRef][Green Version]
- Willett, C.D.; Johnson, S.A.; Adams, M.J.; Seville, J.P.K. Pendular Capillary Bridges. In Handbook of Powder Technology: Granulation; Salman, A.D., Hounslow, M.J., Seville, J.P.K., Eds.; Elsevier B.V.: Amsterdam, The Netherlands, 2007; Volume 2, Chapter 28; pp. 1317–1351. ISBN 978-0-444-51871-2. [Google Scholar]
- Blake, T.D. The Physics of Moving Wetting Lines. J. Colloid Int. Sci. 2006, 199, 1–13. [Google Scholar] [CrossRef]
- Willett, C.D.; Adams, M.J.; Johnson, S.A.; Seville, J.P.K. Effects of Wetting Hysteresis on Pendular Liquid Bridges between Rigid Spheres. Powder Tech. 2003, 130, 63–69. [Google Scholar] [CrossRef]
- Adams, M.J.; Johnson, S.A.; Seville, J.P.; Willett, C.D. Mapping the Influence of Gravity on Pendular Liquid Bridges between Rigid Spheres. Langmuir 2002, 18, 6180–6184. [Google Scholar] [CrossRef]












© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bowen, J.; Cheneler, D. Closed-Form Expressions for Contact Angle Hysteresis: Capillary Bridges between Parallel Platens. Colloids Interfaces 2020, 4, 13. https://doi.org/10.3390/colloids4010013
Bowen J, Cheneler D. Closed-Form Expressions for Contact Angle Hysteresis: Capillary Bridges between Parallel Platens. Colloids and Interfaces. 2020; 4(1):13. https://doi.org/10.3390/colloids4010013
Chicago/Turabian StyleBowen, James, and David Cheneler. 2020. "Closed-Form Expressions for Contact Angle Hysteresis: Capillary Bridges between Parallel Platens" Colloids and Interfaces 4, no. 1: 13. https://doi.org/10.3390/colloids4010013
APA StyleBowen, J., & Cheneler, D. (2020). Closed-Form Expressions for Contact Angle Hysteresis: Capillary Bridges between Parallel Platens. Colloids and Interfaces, 4(1), 13. https://doi.org/10.3390/colloids4010013