Artificial Intelligence to Enhance Aerodynamic Shape Optimisation of the Aegis UAV



Abstract
1. Introduction
2. Materials and Methods
Overview of the Artificial Neural Network
3. Training of the ANN
3.1. Initial Training Versus Live Training
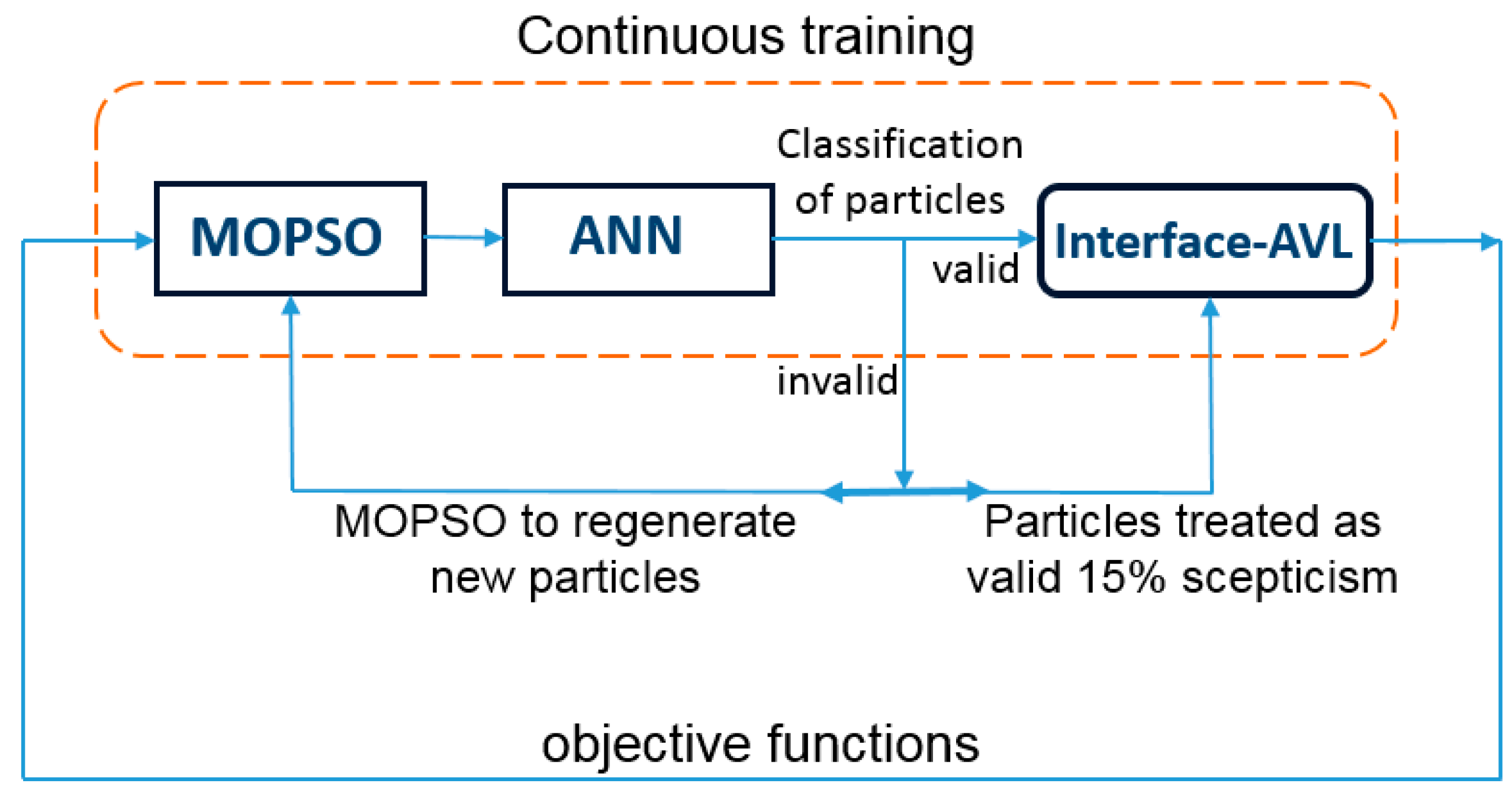
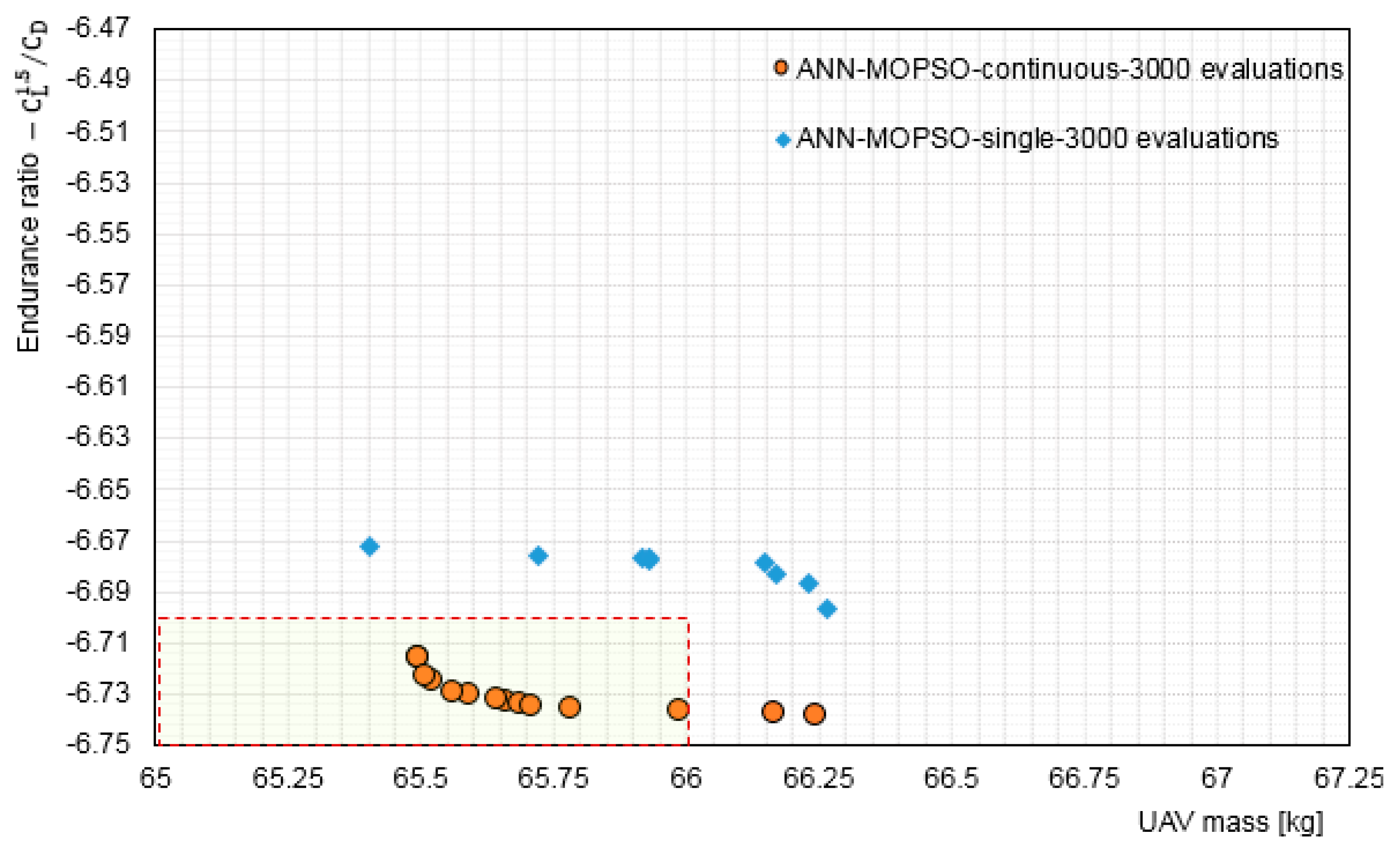
3.2. Continuous Training Versus Single Training
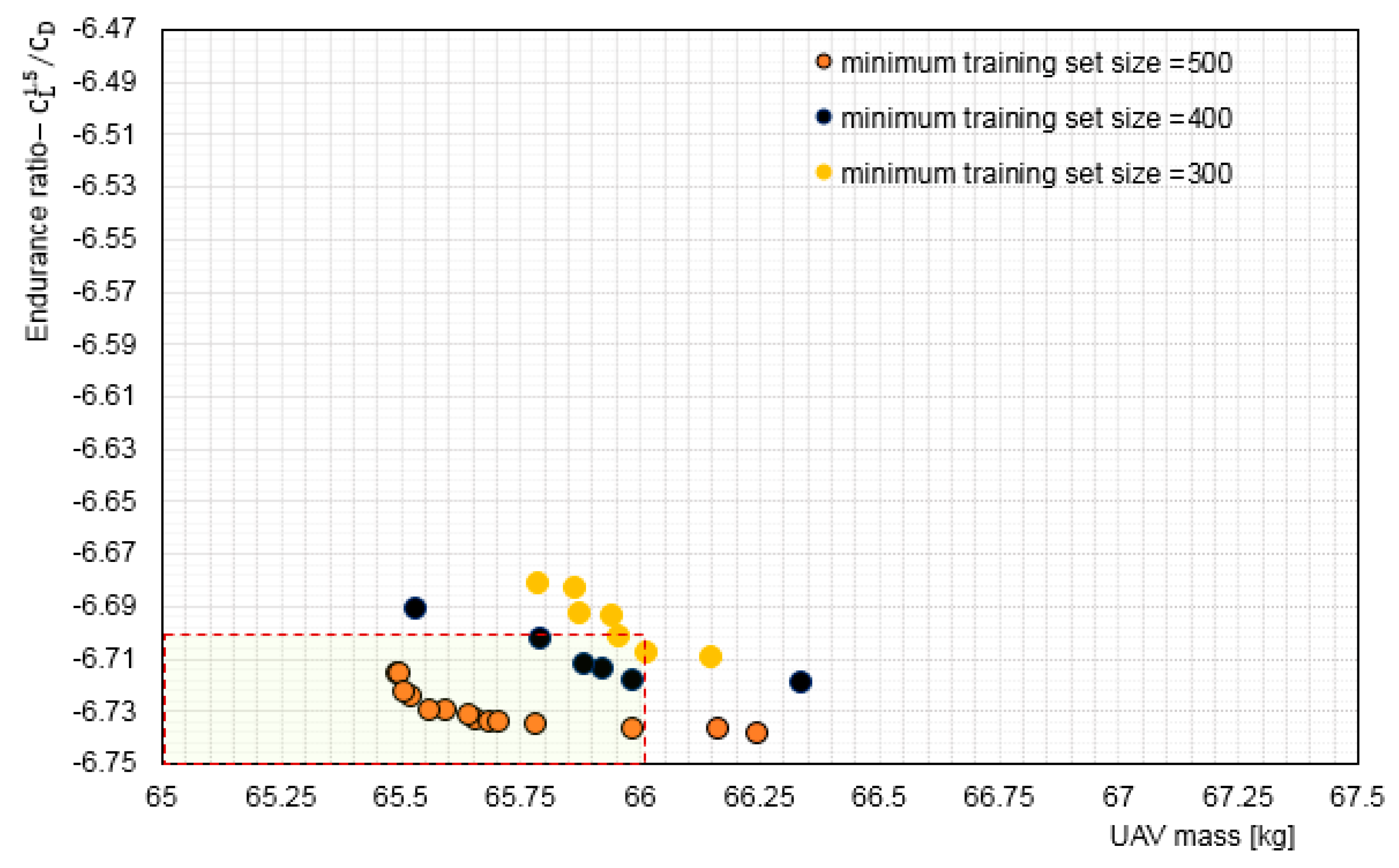
3.3. Size of the Training Set
3.4. Level of Scepticism
4. Problem Architecture
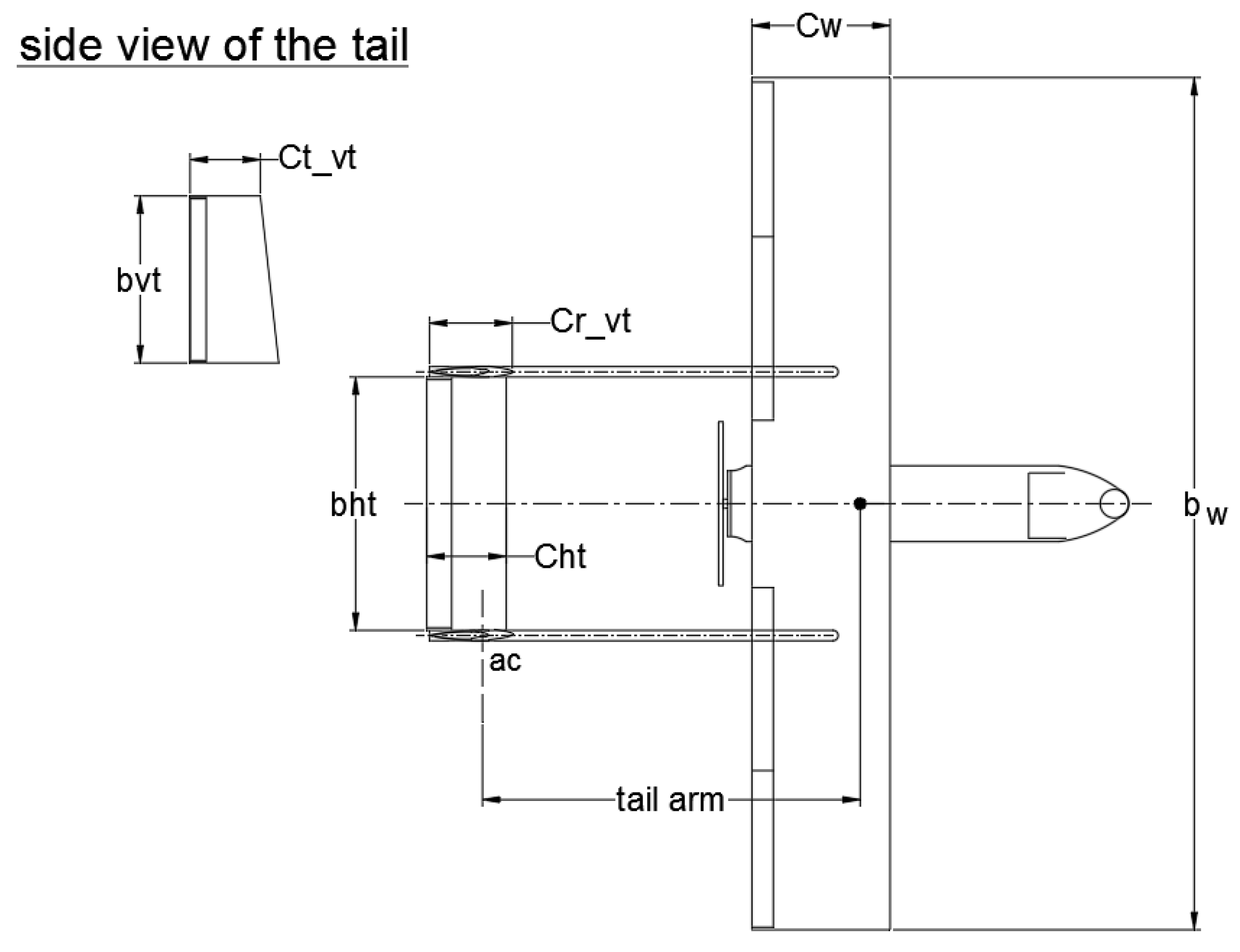
4.1. Problem Definition
4.2. Formulation of the Optimisation Problem
4.3. Related Work
4.4. Design and Setting of the Experiments
5. Results, Observations and Discussion
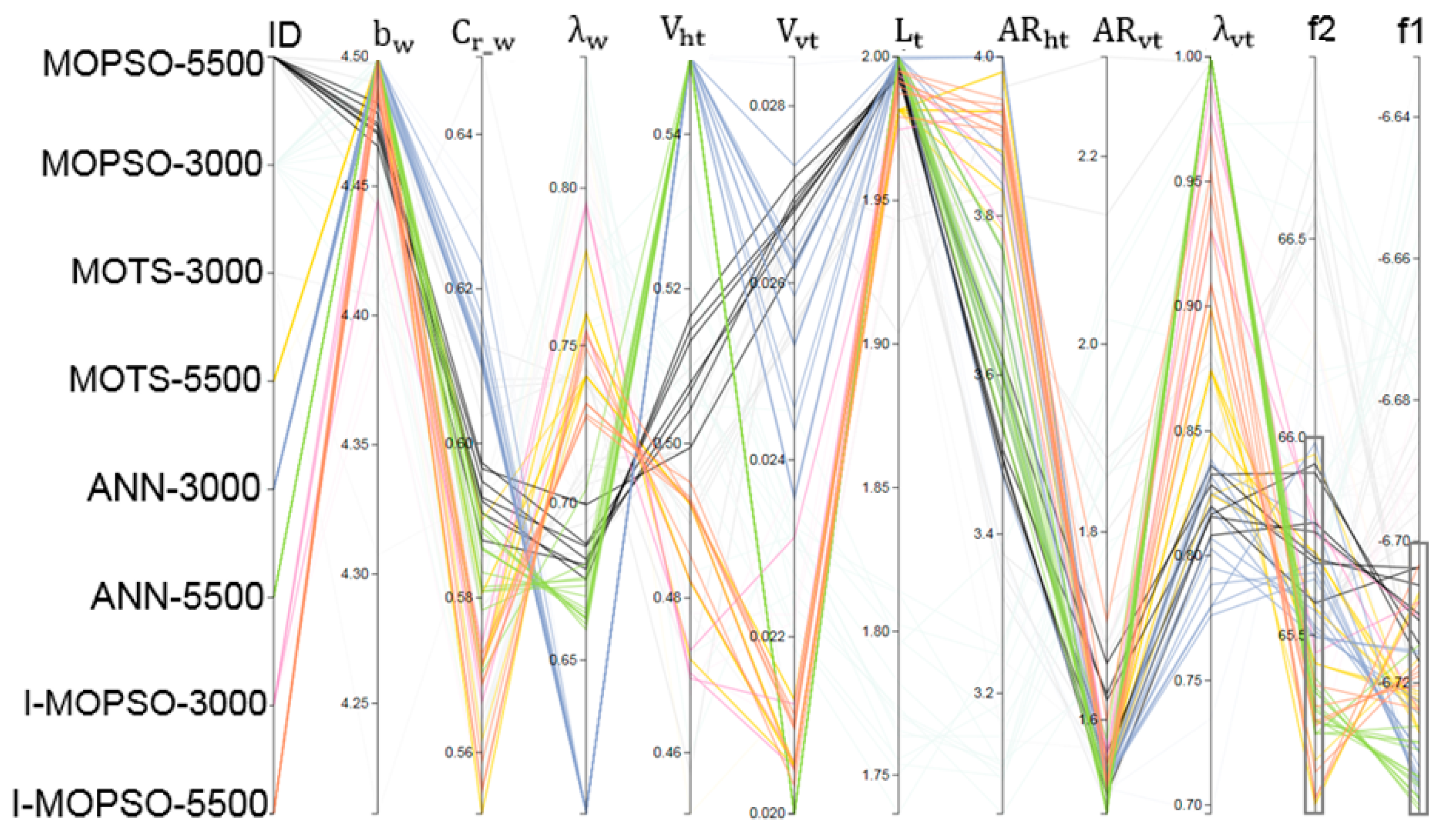
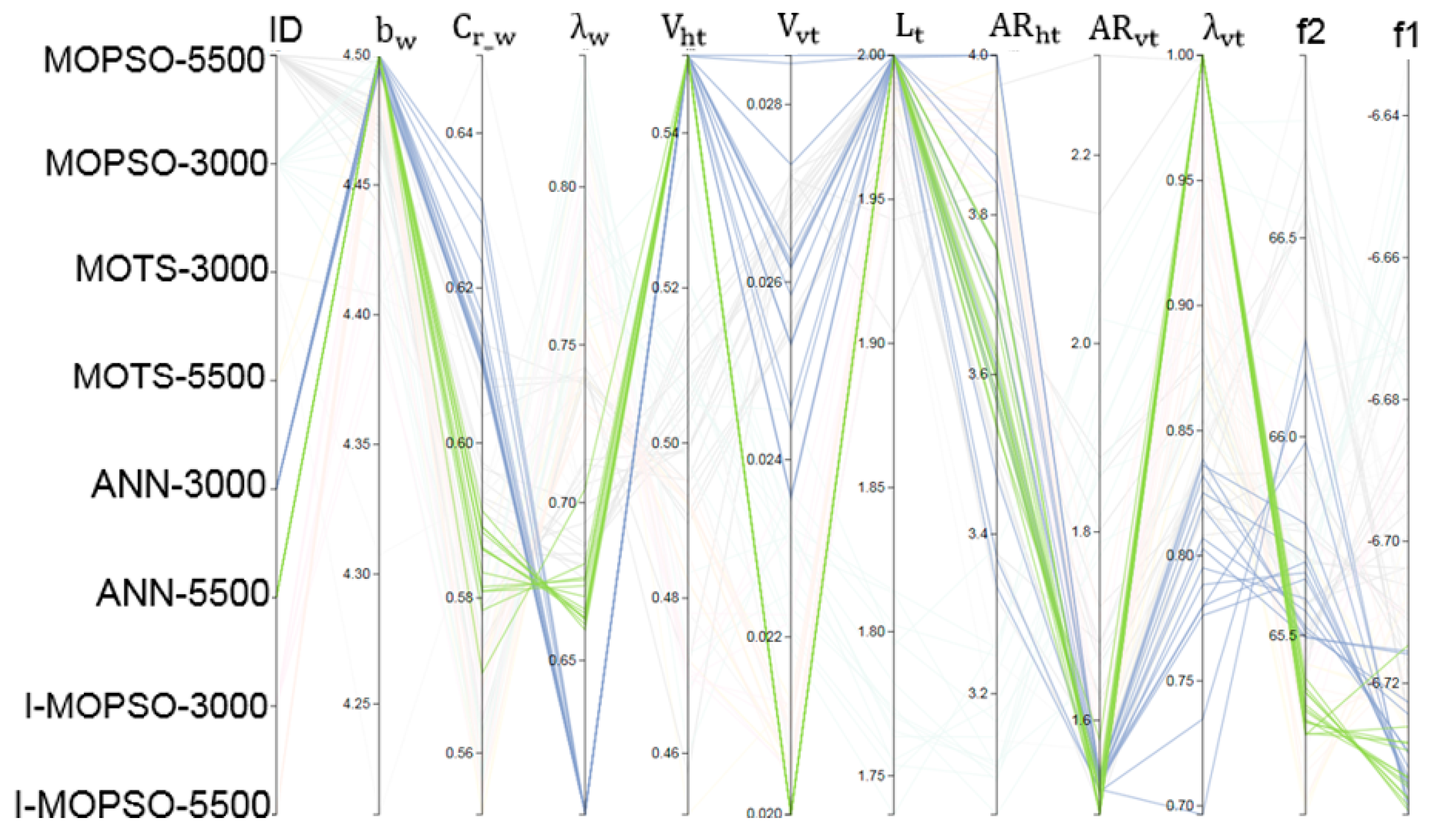
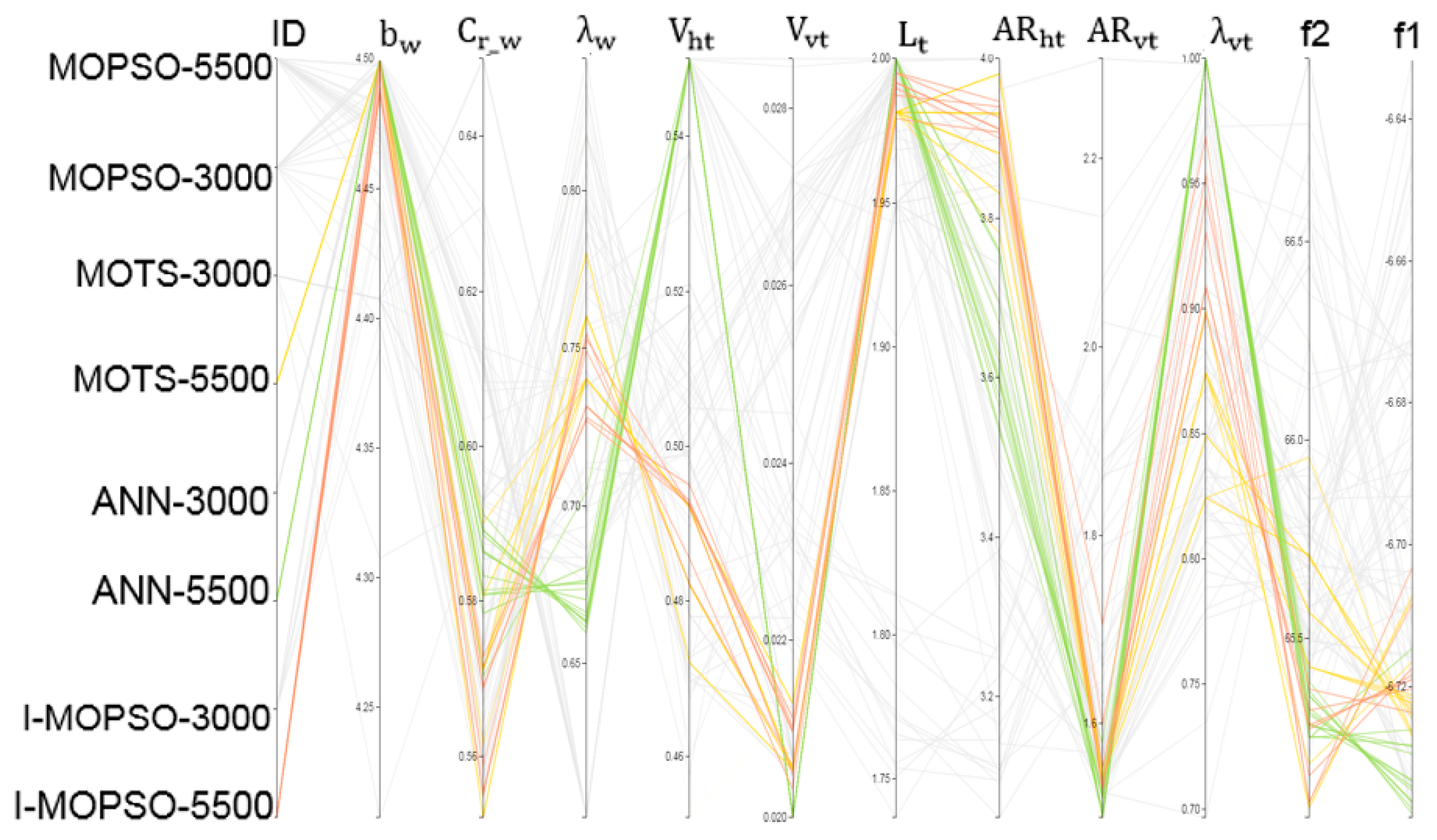
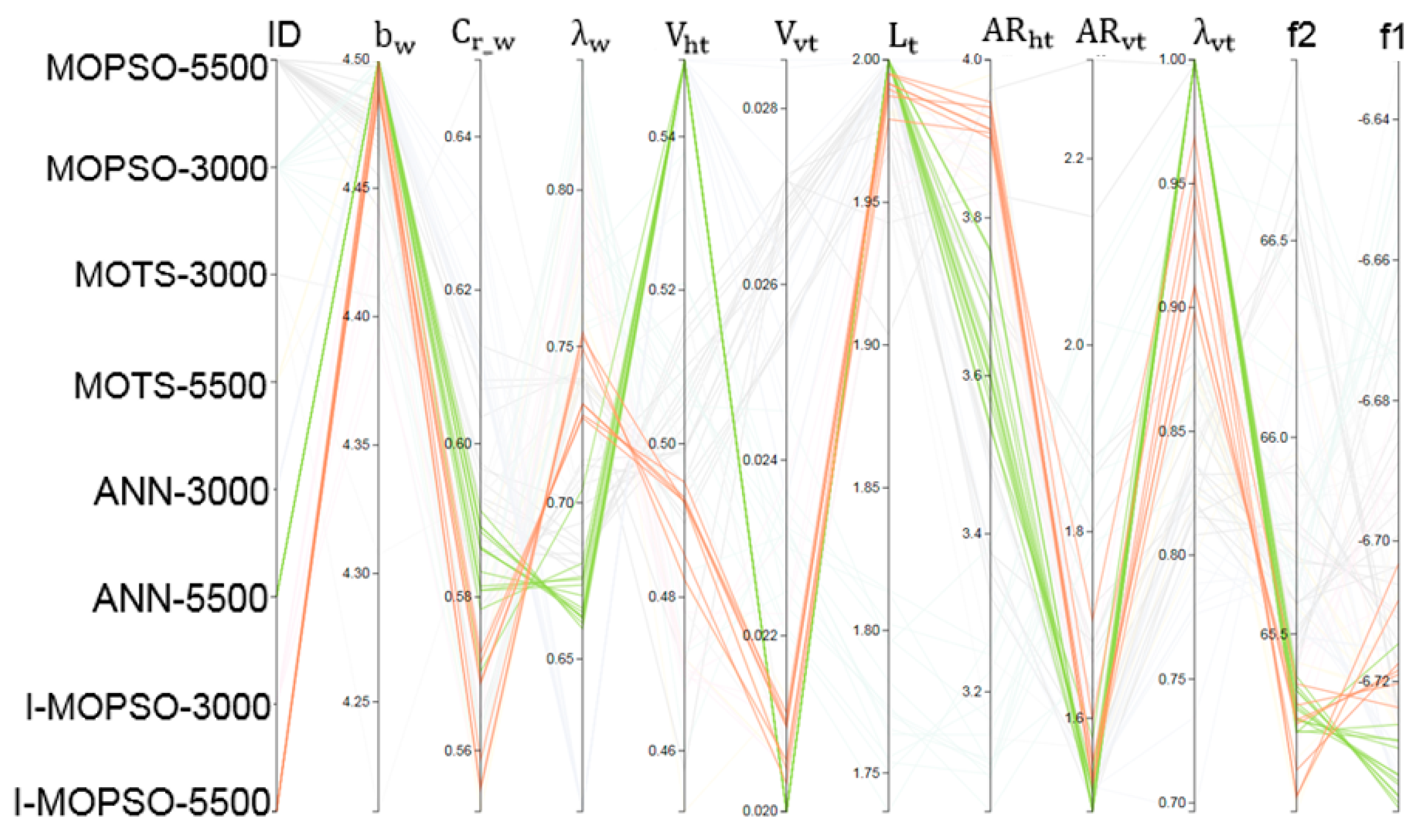
5.1. Data Visualisation and Analysis Using Parallel Coordinates
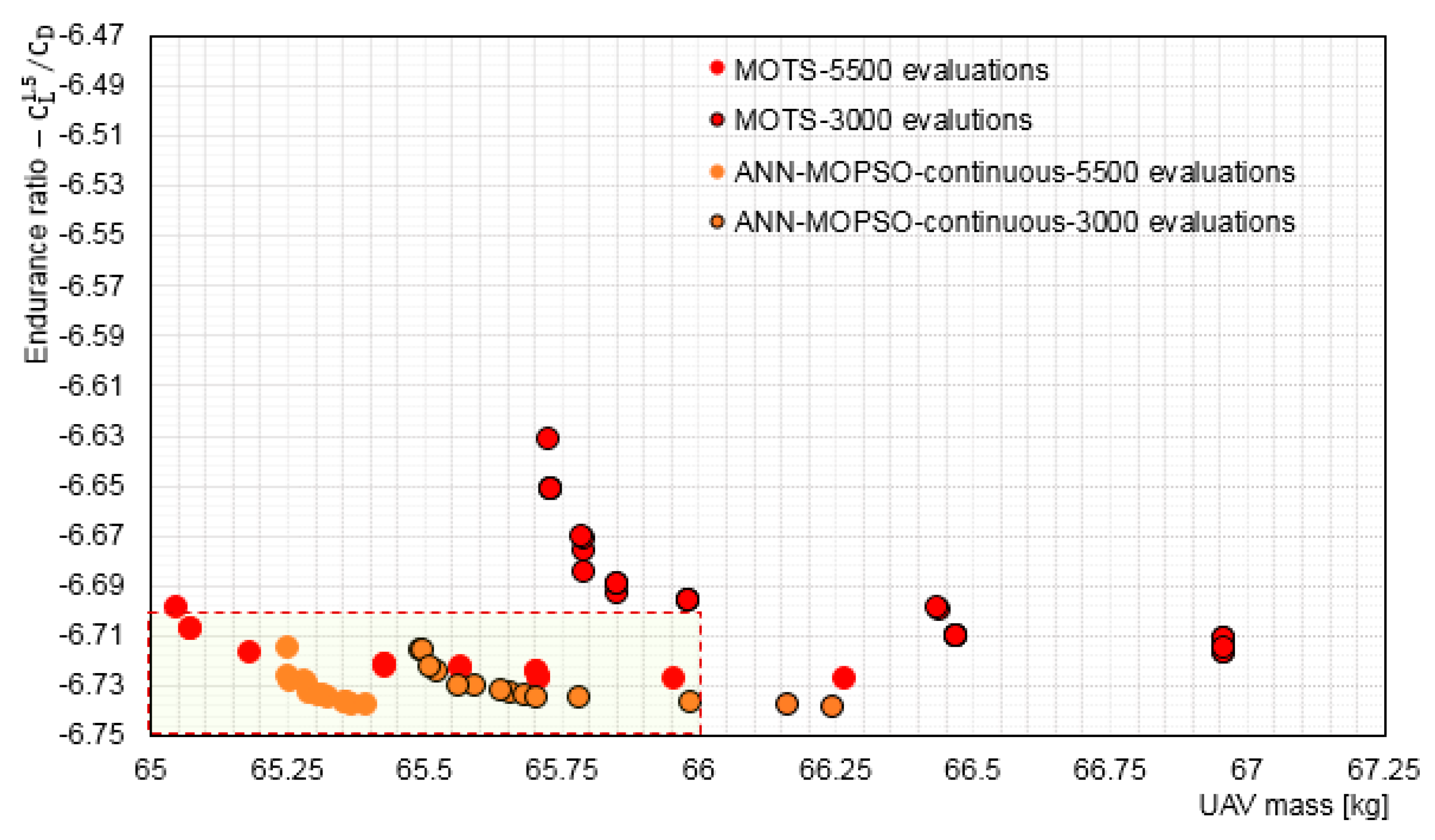
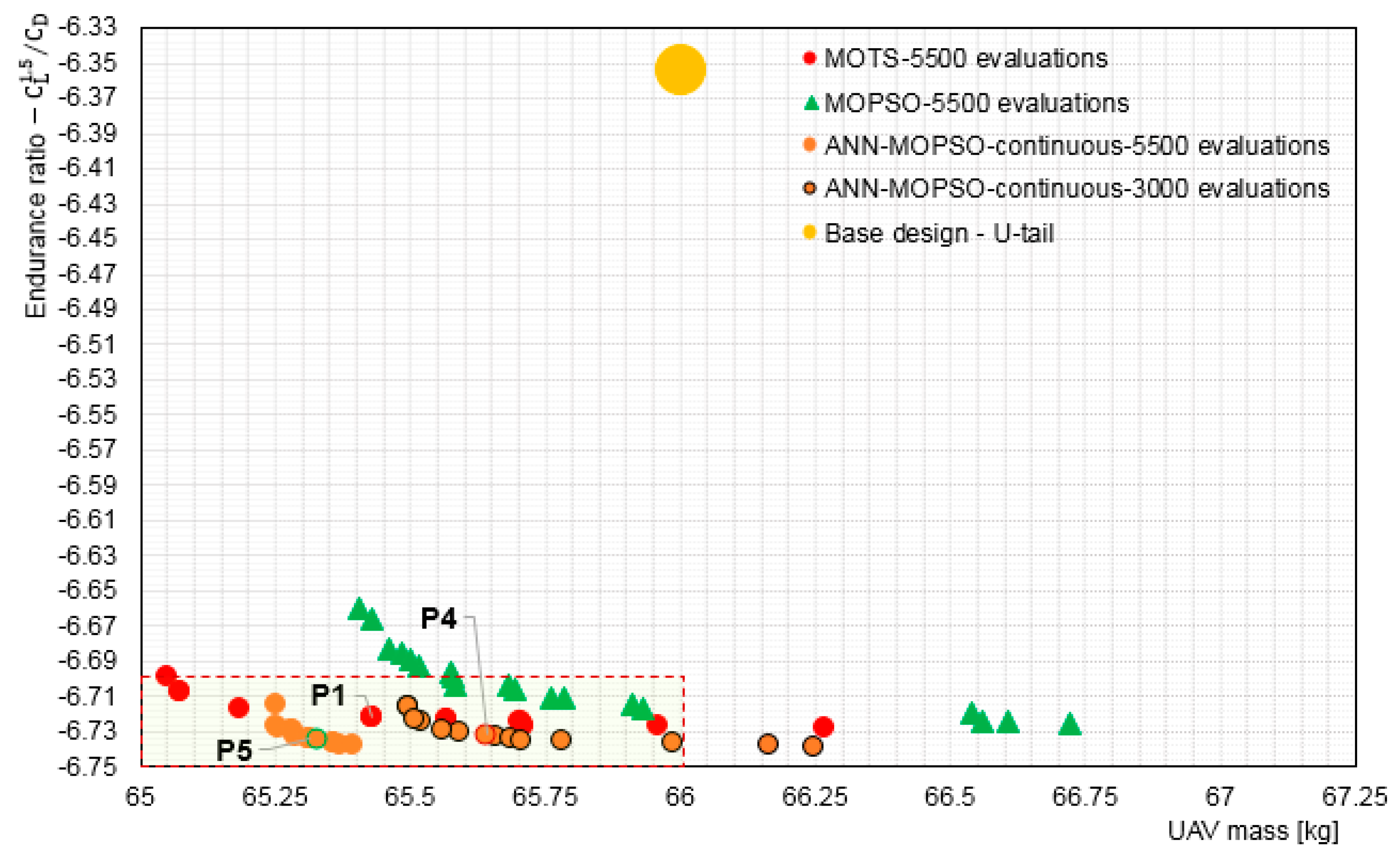
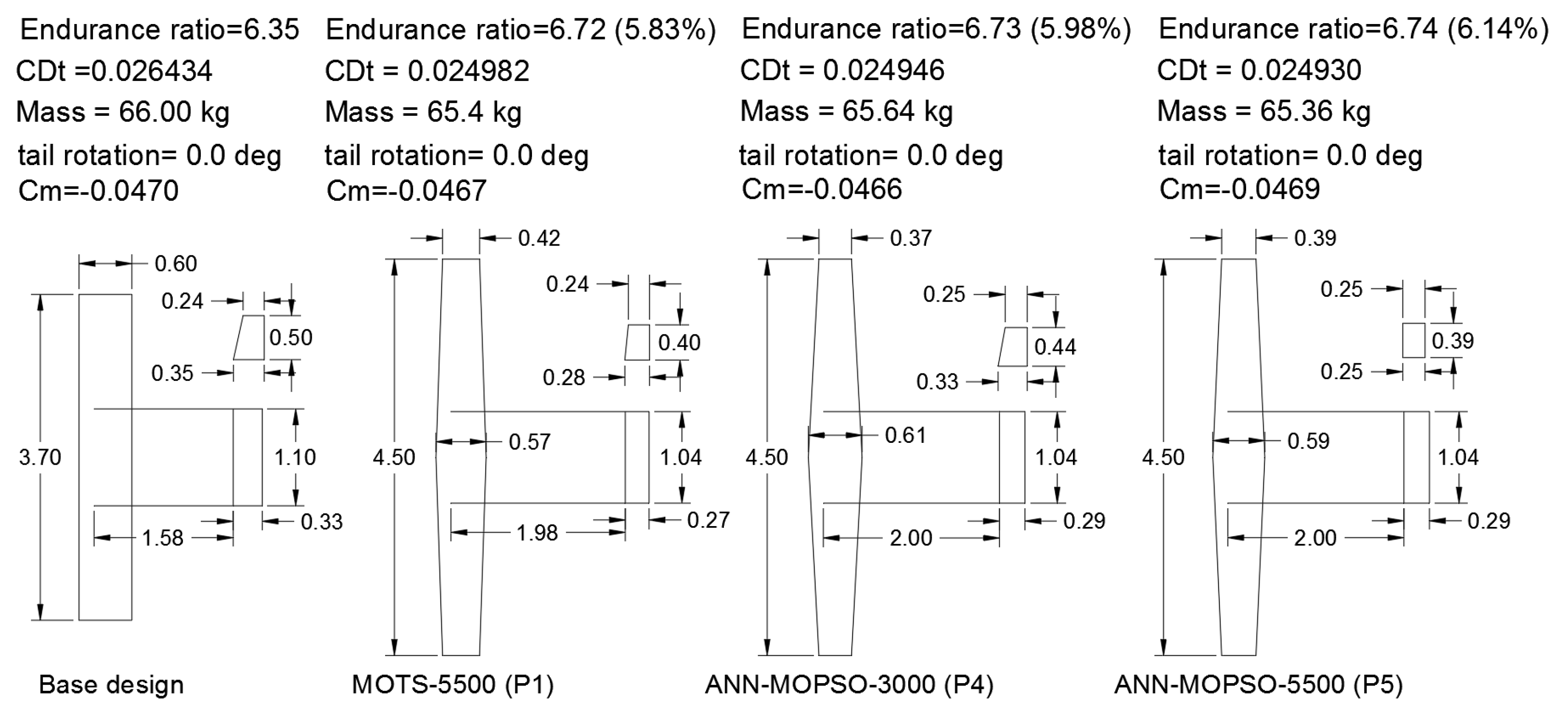
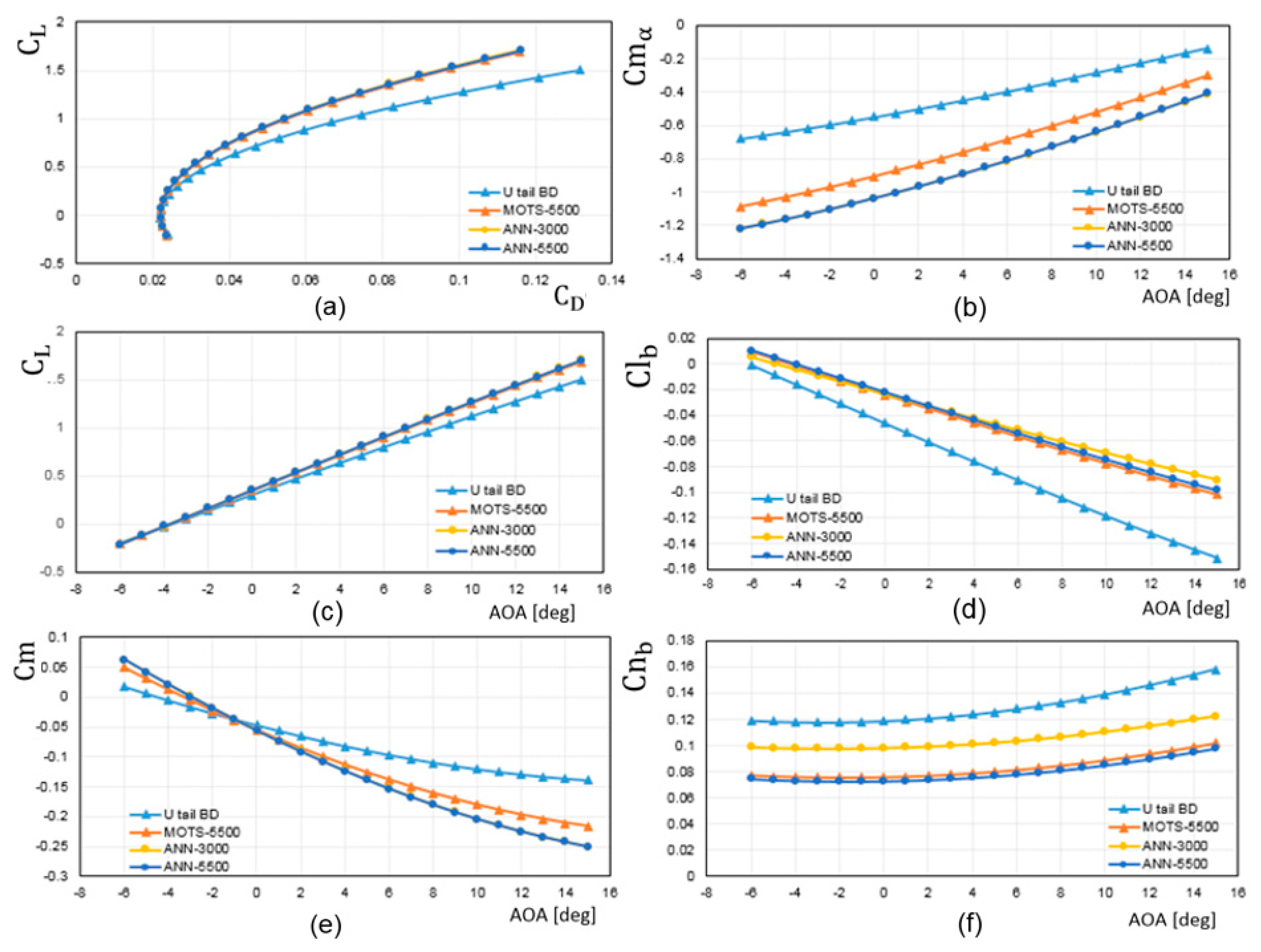
5.2. Detailed Study for Selected Solutions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A

References
- Pourbahman, Z.; Hamzeh, A. Reducing the Computational Cost in Multi-objective Evolutionary Algorithms by Filtering Worthless Individuals. arXiv, 2014; arXiv:1401.5808. [Google Scholar]
- Piperni, P.; DeBlois, A.; Henderson, R. Development of a Multilevel Multidisciplinary-Optimization Capability for an Industrial Environment. AIAA J. 2013, 51, 2335–2352. [Google Scholar] [CrossRef]
- Zhang, M.; Jungo, A.; Gastaldi, A.; Melin, T. Aircraft Geometry and Meshing with Common Language Schema CPACS for Variable-Fidelity MDO Applications. Aerospace 2018, 5, 47. [Google Scholar] [CrossRef]
- Viúdez-Moreiras, D. Performance influences on metamodelling for aerodynamic surrogate-based optimization of an aerofoil. Eng. Optim. 2019, 51, 427–446. [Google Scholar] [CrossRef]
- Rawlins, T.; Lewis, A.; Hettenhausen, J.; Kipouros, T. Enhancing MOPSO through the guidance of ANNs. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Beijing, China, 6–11 July 2014; pp. 4003–4010. [Google Scholar] [CrossRef]
- Kenway, G.K.; Mishra, A.; Secco, N.R.; Duraisamy, K.; Martins, J. An Efficient Parallel Overset Method for Aerodynamic Shape Optimization. In Proceedings of the 58th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Grapevine, TX, USA, 9–13 January 2017. [Google Scholar] [CrossRef]
- Zapotecas Martinez, S.; Arias Montano, A.; Coello Coello, C.A. Constrained Multi-objective Aerodynamic Shape Optimization via Swarm Intelligence. In Proceedings of the 2014 Annual Conference on Genetic and Evolutionary Computation, Vancouver, BC, Canada, 12–16 July 2014; pp. 81–88. [Google Scholar] [CrossRef]
- Jyoti, S.K.; Manjusha, K.D.; Pavan, K.D. Review on Computing Machinery and Intelligence. Int. J. Curr. Microbiol. Appl. Sci. 2018, 7, 442–451. [Google Scholar]
- Kotsiantis, S.B. Supervised Machine Learning: A Review of Classification Techniques. Informatica 2007, 31, 249–268. [Google Scholar] [CrossRef]
- Mair, C.; Kadoda, G.; Le, M.; Phalp, K.; Scho, C.; Shepperd, M.; Webster, S. An investigation of machine learning based prediction systems. J. Syst. Softw. 2000, 53, 23–29. [Google Scholar] [CrossRef]
- Jordan, M.; Kleinberg, J.; Scho, B. Pattern Recognition and Machine Learning; Microsoft; Springer: New York, NY, USA, 2006; ISBN 9780387310732. [Google Scholar]
- Chen, F.; Li, H.; Xu, Z.; Hou, S.; Yang, D. User-friendly optimization approach of fed-batch fermentation conditions for the production of iturin A using artificial neural networks and support vector machine. Electron. J. Biotechnol. 2015, 18, 273–280. [Google Scholar] [CrossRef]
- Mekky, A.; Alberts, T.E. Design of a Stochastic Basis Function Artificial Neural Network Controller for Quadrotors Flight in the Presence of Model and Aerodynamic Uncertainties. In Proceedings of the EEE National Aerospace and Electronics Conference, Dayton, OH, USA, 23–26 July 2018; pp. 395–402. [Google Scholar] [CrossRef]
- Giannakoglou, K.C.; Papadimitriou, D.I.; Kampolis, I.C. Aerodynamic shape design using evolutionary algorithms and new gradient-assisted metamodels. Comput. Methods Appl. Mech. Eng. 2006, 195, 6312–6329. [Google Scholar] [CrossRef]
- Peng, H.; Ling, X. Optimal design approach for the plate-fin heat exchangers using neural networks cooperated with genetic algorithms. Appl. Therm. Eng. 2008, 28, 642–650. [Google Scholar] [CrossRef]
- Amirian, E.; John Chen, Z. Cognitive Data-Driven Proxy Modeling for Performance Forecasting of Waterflooding Process. Glob. J. Technol. Optim. 2017, 8, 1–9. [Google Scholar] [CrossRef]
- Kuo, R.J.; Chi, S.C.; Kao, S.S. A decision support system for selecting convenience store location through integration of fuzzy AHP and artificial neural network. Comput. Ind. 2002, 47, 199–214. [Google Scholar] [CrossRef]
- Cilla, M.; Borgiani, E.; Martínez, J.; Duda, G.N.; Checa, S. Machine learning techniques for the optimization of joint replacements: Application to a short-stem hip implant. PLoS ONE 2017, 12, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Rai, M.M.; Field, M. Robust Optimal Aerodynamic Design Using Evolutionary Methods and Neural Networks. In Proceedings of the 42nd AIAA Aerospace Sciences Meeting and Exhibit, Aerospace Sciences Meetings, Reno, NV, USA, 5–8 January 2004; pp. 1–27. [Google Scholar]
- Askarzadeh, A.; Rezazadeh, A. Artificial neural network training using a new efficient optimization algorithm. Appl. Soft Comput. J. 2013, 13, 1206–1213. [Google Scholar] [CrossRef]
- Volume, C.E.; Electrical, A.; Engineering, A. Redesign of Morphing UAV for Simultaneous Improvement of Directional Stability and Maximum Lift/Drag Ratio. Adv. Electr. Comput. Eng. 2018, 18, 57–62. [Google Scholar]
- Boutemedjet, A.; Samardžić, M.; Rebhi, L.; Rajić, Z.; Mouada, T. UAV aerodynamic design involving genetic algorithm and artificial neural network for wing preliminary computation. Aerosp. Sci. Technol. 2019, 84, 464–483. [Google Scholar] [CrossRef]
- Rai, M.M. Three-Dimensional Aerodynamic Design Using Artificial Neural Networks. In Proceedings of the 40th AIAA Aerospace Sciences Meeting & Exhibit, Reno, NV, USA, 14–17 January 2002. [Google Scholar]
- Rai, M.M.; Madavan, N.K. Aerodynamic design using Neural Networks. AIAA J. 2000, 38, 173–182. [Google Scholar] [CrossRef]
- Mukesh, R.; Lingadurai, K.; Selvakumar, U. Airfoil Shape Optimization based on Surrogate Model. J. Inst. Eng. Ser. C 2017, 99, 1–8. [Google Scholar] [CrossRef]
- Duchaine, F.; Gicquel, L.Y.M.; Bissières, D.; Bérat, C.; Poinsot, T. Automatic Design Optimization Applied to Lean Premixed Combustor Cooling. Available online: https://scholar.google.co.uk/scholar?hl=en&as_sdt=0%2C5&q=Automatic+Design+Optimization+Applied+to+Lean+Premixed+Combustor+Cooling&btnG= (accessed on 15 June 2018).
- Rao, R.V.; Rai, D.P.; Balic, J. A multi-objective algorithm for optimization of modern machining processes. Eng. Appl. Artif. Intell. 2017, 61, 103–125. [Google Scholar] [CrossRef]
- Muhtar, A.; Mustika, I.W. The Comparison of ANN-BP and ANN-PSO as Learning Algorithm to Track MPP in PV System. In Proceedings of the 7th International Annual Engineering Seminar (InAES), Yogyakarta, Indonesia, 1–2 August 2017; pp. 1–6. [Google Scholar]
- Poli, R.; Kennedy, J.; Blackwell, T. Particle swarm optimization. In Proceedings of the IEEE International Conference on Neural Network, Perth, Australia, 27 November–1 December 1995; Volume 4, pp. 1942–1948. [Google Scholar]
- Salomon, R. Evolutionary Algorithms and Gradient Search: Similarities and Differences. IEEE Trans. Evol. Comput. 1998, 2, 45–55. [Google Scholar] [CrossRef]
- Sa, P.K.; Sahoo, M.N.; Murugappan, M.; Wu, Y.; Majhi, B. Progress in Intelligent Computing Techniques: Theory, Practice, and Applications; Springer: Singapore, 2016. [Google Scholar]
- Ebrahimi, M.; Jahangirian, A. Accelerating global optimization of aerodynamic shapes using a new surrogate-assisted parallel genetic algorithm. Eng. Optim. 2017, 49, 2079–2094. [Google Scholar] [CrossRef]
- Annicchiarico, W. Metamodel-assisted distributed genetic algorithms applied to structural shape optimization problems. Eng. Optim. 2007, 39, 757–772. [Google Scholar] [CrossRef]
- Verma, H.O.; Peyada, N.K.; Singh, S. Aerodynamic Modelling of Quasi Steady Stall Using Neural-Network Based Gauss Newton Method. In Proceedings of the International Conference on Infocom Technologies and Unmanned Systems (Trends and Future Directions) (ICTUS), Dubai, UAE, 18–20 December 2017. [Google Scholar]
- Magrini, A.; Benini, E. Aerodynamic Optimization of a Morphing Leading Edge Airfoil with a Constant Arc Length Parameterization. J. Aerosp. Eng. 2018, 31, 04017093. [Google Scholar] [CrossRef]
- Coello Coello, C.A.; Lechuga, M.S. MOPSO: A proposal for multiple objective particle swarm optimization. In Proceedings of the 2002 Congress on Evolutionary Computation. CEC’02 (Cat. No.02TH8600), Honolulu, HI, USA, 12–17 May 2002; Volume 2, pp. 1051–1056. [Google Scholar] [CrossRef]
- Coello Coello, C.A.; Reyes-Sierra, M. Multi-Objective Particle Swarm Optimizers: A Survey of the State-of-the-Art. Int. J. Comput. Intell. Res. 2006, 2, 1–48. [Google Scholar] [CrossRef]
- Qasem, S.N.; Shamsuddin, S.M.H. Radial basis function network based on multi-objective particle swarm optimization. In Proceedings of the 6th International Symposium on Mechatronics and its Applications, Sharjah, UAE, 23–26 March 2009; pp. 1–6. [Google Scholar]
- Mohaghegi, S.; Del Valle, Y.; Venayagamoorthy, G.K.; Harley, R.G. A comparison of PSO and backpropagation for training RBF neural networks for identification of a power system with statcom. In Proceedings of the 2005 IEEE Swarm Intelligence Symposium, SIS 2005, Pasadena, CA, USA, 8–10 June 2005; pp. 391–394. [Google Scholar] [CrossRef]
- Yaghini, M.; Khoshraftar, M.M.; Fallahi, M. A hybrid algorithm for artificial neural network training. Eng. Appl. Artif. Intell. 2013, 26, 293–301. [Google Scholar] [CrossRef]
- Khurana, M.S.; Winarto, H.; Sinha, A.K. Airfoil Optimisation by Swarm Algorithm with Mutation and Artificial Neural Networks. In Proceedings of the 47th AIAA Aerospace Sciences Meeting including The New Horizons Forum and Aerospace Exposition, Aerospace Sciences Meetings, Orlando, FL, USA, 5–8 January 2009; pp. 1–19. [Google Scholar] [CrossRef]
- Hettenhausen, J.; Lewis, A.; Mostaghim, S. Interactive multi-objective particle swarm optimization with heatmap-visualization-based user interface. Eng. Optim. 2010, 42, 119–139. [Google Scholar] [CrossRef]
- Azabi, Y.; Savvaris, A.; Kipouros, T. Initial Investigation of Aerodynamic Shape Design Optimisation for the Aegis UAV. Transp. Res. Procedia 2018, 29, 12–22. [Google Scholar] [CrossRef]
- Yousef, A.; Al Savvaris, T.K. The Interactive Design Approach for Aerodynamic Shape Design Optimisation of the Aegis UAV. Aerospace 2019, in press. [Google Scholar]
- Chau, T.; Zingg, D.W. Aerodynamic shape optimization of a box-wing regional aircraft based on the reynolds-averaged Navier-Stokes equations. In Proceedings of the 35th AIAA Applied Aerodynamics Conference, Denver, CO, USA, 5–9 June 2017; pp. 1–29. [Google Scholar] [CrossRef]
- Iemma, U.; Diez, M. Optimal Conceptual Design of Aircraft Including Community Noise Prediction. In Proceedings of the 12th AIAA/CEAS Aeroacoustics Conference, Cambridge, MA, USA, 8–10 May 2006; pp. 8–10. [Google Scholar] [CrossRef]
- Reuter, R.A.; Iden, S.; Snyder, R.D.; Allison, D.L. An Overview of the Optimized Integrated Multidisciplinary Systems Program. In Proceedings of the 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, San Diego, CA, USA, 4–8 January 2016; pp. 1–11. [Google Scholar] [CrossRef]
- Nicolai, L.M.; Carichner, G.E. Fundamentals of Aircraft and Airship Design; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2010; Volume 1, ISBN 978-1-60086-751-4. [Google Scholar]
- Demšar, J.; Curk, T.; Erjavec, A.; Hočevar, T.; Milutinovič, M.; Možina, M.; Polajnar, M.; Toplak, M.; Starič, A.; Stajdohar, M.; et al. Orange: Data Mining Toolbox in Python. J. Mach. Learn. Res. 2013, 14, 23492353. [Google Scholar]
- Coello, C.A.C.; Pulido, G.T.; Lechuga, M.S. Handling multiple objectives with particle swarm optimization. Evol. Comput. IEEE Trans. 2004, 8, 256–279. [Google Scholar] [CrossRef]
- Drela, M.; Youngren, H. AVL 3.26 User Primer. Available online: http://web.mit.edu/drela/Public/web/avl/ (accessed on 25 November 2015).
- Hadjiev, J.; Panayotov, H. Comparative Investigation of VLM Codes for Joined-Wing Analysis. Int. J. Res. Eng. Technol. 2013, 02, 478–482. [Google Scholar]
- Sadraey, M. Aircraft Performance Analysis; VDM Verlag Dr. Muller: Saarbrücken, Germany, 2009. [Google Scholar]
- Tilocca, G. Interactive Optimisation for Aircraft Application. Master’s Thesis, Cranfield University, Cranfield, UK, 2016. [Google Scholar]
- Demsar, J.; Zupan, B. Orange: Data mining fruitful and fun. Informatica 2013, 37, 55. [Google Scholar]
- Stajdohar, M.; Demsar, J. Interactive Network Exploration with Orange. J. Stat. Softw. 2013, 53. [Google Scholar] [CrossRef]
- Ngiam, J.; Coates, A. On Optimization Methods for Deep Learning. In Proceedings of the 28th International Conference on International Conference on Machine Learning, Bellevue, WA, USA, 28 June–2 July 2011; pp. 1–3. [Google Scholar]
- Keast, S. Modeling, Simulation, and Sil Testing of the Aegis UAV. Master’s Thesis, Cranfield University, Cranfield, UK, 2015. [Google Scholar]
- Turquand, C. Aerodynamic Analysis and Optimisation of the Aegis TUAV. Master’s Thesis, Cranfield University, Cranfield, UK, 2011. [Google Scholar]
- Gudmundsson, S. General Aviation Aircraft Design: Applied Methods and Procedures; Butterworth-Heinemann: Oxford, UK, 2014; ISBN 978-0-12-397308-5. [Google Scholar]
- Gundlach, J. Designing Unmanned Aircraft Systems: A Comprehensive Approach; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2012; ISBN 978-1-60086-843-6. [Google Scholar]
- Lee, J. General Aviation Aircraft Design. AIAA J. 2015, 54, 793–794. [Google Scholar] [CrossRef]
- Rajagopal, S.; Ganguli, R. Multidisciplinary Design Optimization of Long Endurance Unmanned Aerial Vehicle Wing. Comput. Model. Eng. Sci. 2012, 1680, 1–34. [Google Scholar]
- Riley, M.J.W.; Peachey, T.; Abramson, D.; Jenkins, K.W. Multi-objective engineering shape optimization using differential evolution interfaced to the Nimrod/O tool. IOP Conf. Ser. Mater. Sci. Eng. 2010, 10, 012189. [Google Scholar] [CrossRef]
- Abramson, D.; Lewis, A.; Peachey, T.; Fletcher, C. An Automatic Design Optimization Tool and its Application to Computational Fluid Dynamics Searching for Optimal Designs. In Proceedings of the 2001 ACM/IEEE Conference on Supercomputing, Denver, CO, USA, 10–16 November 2001. [Google Scholar]
- Abramson, D.; Peachey, T.; Lewis, A. Model Optimization and Parameter Estimation with Nimrod/O. In Proceedings of the 6th International Conference, Reading, UK, 28–31 May 2006; Volume 1, pp. 720–727. [Google Scholar] [CrossRef]
- Tobergte, D.R.; Curtis, S. A Multi-objective Tabu Search Algorithm for Constrained Optmisation Problems. J. Chem. Inf. Model. 2013, 53, 1689–1699. [Google Scholar] [CrossRef]
- Jaeggi, D.M.; Parks, G.T.; Kipouros, T.; Clarkson, P.J. The development of a multi-objective Tabu Search algorithm for continuous optimisation problems. Eur. J. Oper. Res. 2008, 185, 1192–1212. [Google Scholar] [CrossRef]
- Pirim, H.; Bayraktar, E.; Eksioglu, B. Tabu Search: A Comparative Study. Available online: https://www.intechopen.com/download/pdf/4589 (accessed on 4 April 2019).
- Connor, A.; Clarkson, J.P.; Shaphar, S.; Leonard, P. Engineering design optimisation using Tabu search. In Design for Excellence: Engineering Design Conference 2000; John Wiley & Sons: London, UK, 2000; pp. 371–378. [Google Scholar]
- Ghisu, T.; Parks, G.T.; Jaeggi, D.M.; Jarrett, J.P.; Clarkson, P.J. The benefits of adaptive parametrization in multi-objective Tabu Search optimization. Eng. Optim. 2010, 42, 959–981. [Google Scholar] [CrossRef]
- Lusignani, G. Supercomputer Powers up at Cranfield University. Available online: https://www.cranfield.ac.uk/press/news-2017/0816-supercomputer powers up at cranfield university (accessed on 27 September 2018).
- Vanderplaats, G.N.; Springs, C. Design Optimisation a Powerful Tool for the Competitive Edge. In Proceedings of the 1st AIAA Aircraft, Technology Integration, and Operations Forum, Aviation Technology, Integration, and Operations (ATIO) Conferences, Los Angeles, CA, USA, 16–18 October 2001; p. 8. [Google Scholar] [CrossRef]
- He, Z.; Yen, G.G. An improved visualization approach in many-objective optimization. In Proceedings of the IEEE Congress on Evolutionary Computation (CEC), Vancouver, BC, Canada, 24–29 July 2016; pp. 1618–1625. [Google Scholar] [CrossRef]
- He, Z.; Yen, G.G. Visualization and Performance Metric in many-objective optimization. IEEE Trans. Evol. Comput. 2016, 20, 386–402. [Google Scholar]
- Wong, P.C.; Bergeron, R.D. 30 Years of Multidimensional Multivariate Visualization. Sci. Vis. Overviews Methodol. Tech. 1997, 2, 3–33. [Google Scholar]
- Inselberg, A. Parallel Coordinates: Visilization Multidimensional Geometry and Its Applications; Shneiderman, B., Ed.; Spring Science: New York, NY, USA, 2009; ISBN 978-0-387-21507-5. [Google Scholar]
- Siirtola, H.; Räihä, K.J. Interacting with parallel coordinates. Interact. Comput. 2006, 18, 1278–1309. [Google Scholar] [CrossRef]
- Inselberg, A. The plane with parallel coordinates. Vis. Comput. 1985, 1, 69–91. [Google Scholar] [CrossRef]
- Heinrich, J.; Weiskopf, D. State of the Art of Parallel Coordinates. Eurograph. Conf. Vis. 2013, 95–116. [Google Scholar] [CrossRef]
- Deb, K.; Pratab, S.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NGSA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Lower Bound | Base Design | Upper Bound | ||
|---|---|---|---|---|---|
| Wingspan | (m) | 3.50 | 3.70 | 4.50 | |
| Wing root | (m) | 0.55 | 0.60 | 0.74 | |
| Wing taper ratio | (-) | 0.6 | 1.0 | 1.0 | |
| Horizontal tail volume | (-) | 0.35 | 0.43 | 0.55 | |
| Vertical tail volume | (-) | 0.020 | 0.029 | 0.035 | |
| Tail arm | (m) | 1.45 | 1.58 | 2.00 | |
| Horizontal tail aspect ratio | (-) | 3.00 | 3.33 | 4.00 | |
| Vertical tail aspect ratio | (-) | 1.50 | 1.69 | 2.50 | |
| Vertical tail taper ratio | (-) | 0.50 | 0.68 | 1.00 | |
| Parameter | Evaluations = 3000 | Evaluations = 5500 |
|---|---|---|
| Particles | 30 | 50 |
| Iteration | 100 | 110 |
| Training approach | continuous | continuous |
| Initial training set size | 500 | 500 |
| Scepticism | 15% | 15% |
| Archive | Live | Live |
| For 5500 Evaluations | For 3000 Evaluations | |||||
|---|---|---|---|---|---|---|
| Code | Valid | Invalid | Time [m] | Valid | Invalid | Time [m] |
| MOPSO | 988 | 4512 | 195 | 529 | 2471 | 120 |
| ANN-MOPSO | 2238 | 3258 | 212 | 1006 | 1992 | 131 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azabi, Y.; Savvaris, A.; Kipouros, T. Artificial Intelligence to Enhance Aerodynamic Shape Optimisation of the Aegis UAV. Mach. Learn. Knowl. Extr. 2019, 1, 552-574. https://doi.org/10.3390/make1020033
Azabi Y, Savvaris A, Kipouros T. Artificial Intelligence to Enhance Aerodynamic Shape Optimisation of the Aegis UAV. Machine Learning and Knowledge Extraction. 2019; 1(2):552-574. https://doi.org/10.3390/make1020033
Chicago/Turabian StyleAzabi, Yousef, Al Savvaris, and Timoleon Kipouros. 2019. "Artificial Intelligence to Enhance Aerodynamic Shape Optimisation of the Aegis UAV" Machine Learning and Knowledge Extraction 1, no. 2: 552-574. https://doi.org/10.3390/make1020033
APA StyleAzabi, Y., Savvaris, A., & Kipouros, T. (2019). Artificial Intelligence to Enhance Aerodynamic Shape Optimisation of the Aegis UAV. Machine Learning and Knowledge Extraction, 1(2), 552-574. https://doi.org/10.3390/make1020033