Abstract
This work presents radial basis function collocation methods in pseudospectral form for forecasting the static deformations and free vibration characteristics of thin and thick cross-ply laminated shells. This method utilizes an innovative layerwise shallow shell theory that integrates both translational and rotational degrees of freedom. A collection of numerical examples illustrates the precision and efficacy of the suggested numerical method, highlighting its capability in resolving static and vibrational issues.
1. Introduction
The majority of numerical techniques for laminated shell analysis rely on finite element or analytical solutions. A accurate numerical technique and the suitable application of a shear deformation theory are necessary for an effective analysis. Shear deformation theories can be broadly divided into two groups: layerwise (LW) theories, in which each layer has distinct degrees of freedom, and equivalent single layer (ESL) theories, in which all layers share the same set of degrees of freedom. ESL theories are further subdivided into higher-order theories as in Pandya and Kant [1], Reddy and Liu [2], and Touratier [3], and first-order theories as the Mindlin’s plate theory [4]. LW theories can concentrate just on translational motion at each layer’s interfaces [5]. Carrera [6,7,8] developed a unified formulation that modifies the expansion vector for a particular plate/shell theory, allowing for the application of many theories.
Recently, the Kansa technique for collocation with radial basis functions (RBFs) have been presented (Kansa [9], Ferreira [10,11]). RBFs were first used to interpolate geographically scattered data by Hardy [12,13]. Later, they were utilized to solve partial differential equations (PDEs) by Kansa [9,14]. Using various shear deformation theories several successful applications of the RBF collocation to plates and shell were presented in [15,16]. A successful concurrent strong-form element method was given in [17]. Layerwise theories have undergone recent developments, as detailed in [18,19].
In this work, we employ an optimized shape parameter in conjunction with radial basis functions (RBFs) within a pseudospectral framework and a layerwise shell theory. We are able to investigate laminated shallow shell free vibrations and static deformations with this technology. The calculated values, which were attained by applying several techniques, are in very good agreement with the ones found in the literature.
2. Collocation with Radial Basis Functions in Pseudospectral Framework
Formulation
Pseudospectral (PS) methods [20,21] are able to deliver highly accurate approximate solutions to problems with partial differential equations (PDEs). In these methods, the spatial component of the approximate solution is represented as a linear combination of basis functions , where , as
The utilization of polynomial basis functions in higher-dimensional spaces is generally confined to tensor products of one-dimensional basis functions. To overcome this issue, we substitute polynomials with radial basis functions (RBFs), enabling the modeling of uneven, general geometry grids with accuracy comparable to classic PS approaches.
In the realm of resolving linear partial differential equations, the radial basis function collocation approach, also known as Kansa’s method [9], necessitates that both the partial differential equation and the corresponding boundary conditions are fulfilled at a designated set of collocation locations, yielding a system of linear algebraic equations, that is solved to obtain coefficients in Equation (1). The approximate solution can be computed then at any position x utilizing Equation (1).
Consider an elliptic PDE:
subject to Dirichlet boundary condition:
In the RBF-PS methodology, the solution is described as follows:
where the points , serve as the centers of the RBF, with . By evaluating Equation (4) at a set of collocation points , we obtain:
or in matrix-vector notation as:
where denotes the coefficient vector, and represents the matrix of RBF evaluations, and denotes the vector of approximate solutions at the collocation sites.
A prevalent approach to executing the PS technique entails the formulation of a differentiation matrix , such that, at each grid point , the relationship
is maintained, where denotes the vector of differentiated solution values.
The vector denotes the values of at the grid points, while indicates the vector of derivative values of u at the same locations. Instead of determining the coefficients c by solving a system of linear equations, as is standard in the conventional RBF collocation approach (Kansa’s method), we utilize the differentiation matrix . This yields a discrete formulation of the PDE as:
where u is defined as previously stated, and f is the vector comprising the values of the right-hand side function f from Equation (2) assessed at the collocation points. In the differential Equation (2), the differential operator is applied to the approximate solution as specified in Equation (4). According to linearity, we obtain:
Assessing this statement at the collocation sites yields a system of linear algebraic equations, which can be expressed in matrix-vector notation as:
where and are as defined in Equation (5), and the matrix has entries . Although we do not explicitly calculate the coefficients , they are given by . Substituting this into the equation above, we obtain:
The differentiation matrix is defined as . To implement the Dirichlet boundary conditions from Equation (3), we substitute the rows of L associated with the boundary collocation points with conventional unit vectors, featuring a one in the diagonal position and zeros in all other positions. Furthermore, we substitute the equivalent values of on the right-hand side with .
The shape parameter is essential in determining the precision of the numerical solution. The ideal value of is ascertained by Rippa’s [22] method, a form of cross-validation referred to as “leave-one-out” cross-validation (LOOCV). Despite the computational expense associated with a direct implementation of the LOOCV algorithm, Rippa shown that it may be streamlined into a singular formula:
where is the k th coefficient in the interpolant based on the full dataset, and is the k th diagonal element of the inverse of the corresponding interpolation matrix.
We will now demonstrate the calculation of differentiation matrices utilizing three pseudospectral approaches. The initial approach utilizes Trefethen’s ‘cheb.m’ code as detailed in [21]. The last two approaches employ collocation with radial basis functions in a pseudospectral framework, utilizing differentiation matrices of size , where N denotes the number of nodes in the domain, inclusive of the boundaries. Such matrices facilitate the interpolation of the equations of motion, permitting resolution as a linear system of equations (in static scenarios) or as a generalized eigenvalue problem (in cases of free vibrations or buckling). Utilizing Trefethen’s ‘cheb.m’ code from [21], we derive the differentiation matrices in a concise format, as demonstrated in Program 1.
Program 1.
Using cheb.m from Trefethen’s book [21]
% PS methd using Trefethen’s cheb.m code
[D,x] = cheb(N);
D2 = D^2;Dy=kron(D,I);
Dx=kron(I,D);
Dxx=kron(I,D2);
Dyy=kron(D2,I);
Dxy=Dx{*}Dy;
In the context of employing radial basis functions in a univariate framework, we initially calculate the differentiation matrix D. Thereafter, we derive the differentiation matrices , and others by employing the Kronecker product through MATLAB’s (2024 version) kron function, as demonstrated in Program 2. The shape parameter epsilon is calculated via Rippa’s algorithm, as detailed by Ferreira and Fasshauer in [23].
Program 2.
Using RBFs in tensor-product mode
% Kansa’s unsymmetric method on tensor-product grids
rbf = @(e,r) exp(-(e*r).^2);
drbf = @(e,r,dx) -2*e^2*dx.*exp(-(e*r).^2);
d2rbf = @(e,r) 2*e^2*(2*(e*r).^2-1).*exp(-(e*r).^2);
r = DistanceMatrix(x,x);
dx = DifferenceMatrix(x,x);
maxepsilon = 5;minepsilon = .1;
[epsilon,fval,exitflag,output] = fminbnd(@(epsilon)...
CostEpsilonDxRBFPS(epsilon,r,dx),minepsilon,maxepsilon);
ep=epsilon;
A = rbf(ep,r);
DA = drbf(ep,r,dx);
D = DA/A;D2A = d2rbf(ep,r);
D2 = D2A/A;
Dy=kron(D,I);
Dx=kron(I,D);
Dxx=kron(I,D2);
Dyy=kron(D2,I);
Dxy=Dx{*}Dy;
The methodologies outlined in Programs 1 and 2 are confined to tensor-product grids, which may be constraining for specific engineering applications. This code calculates differentiation matrices for generic two-dimensional grids to overcome this constraint.
Program 3.
Using RBFs in general 2D grids
% Kansa’s unsymmetric method on general grids
[Dx,x,y,epsilon] = DxRBF(N);
[Dy,x,y] = DyRBF(N,epsilon);
[Dxx,x,y] = DxxRBF(N,epsilon);
[Dxy,x,y] = DxyRBF(N,epsilon);
[Dyy,x,y] = DyyRBF(N,epsilon);
In Program 4, we illustrate the computation of the matrix , which encompasses the first derivatives concerning x. Comparable procedures can be utilized to derive matrices for additional derivatives. In accordance with the methodology established by Ferreira and Fasshauer [23], we delineate the procedure for calculating the shape parameter epsilon utilizing Rippa’s algorithm in Program 5. It is essential to acknowledge that an other differentiation matrix may have been employed instead of .
Program 4.
Computing Dx
% DxRBF compute D = differentiation matrix, x,y = Chebyshev grids
function [D,x,y,epsilon] = DxRBF(N,epsilon)
global rbf dxrbf dyrbf dxxrbf dxyrbf dyyrbf Lrbf L2rbf d2rbf
if N==0, D=0; x=1; return, end
x = cos(pi*(0:N)/N)’; % Chebyshev points
y=x;[xx,yy] = meshgrid(x,y);
points = [xx(:) yy(:)];
r = DistanceMatrix(points,points);
dx = DifferenceMatrix(xx,xx);
if nargin == 1
% Shape parameter interval
maxepsilon = 10;
minepsilon = .1;
[epsilon,fval,exitflag,output] = fminbnd(@(epsilon) ...
CostEpsilonDxRBF(epsilon,r,dx),minepsilon,maxepsilon);
end
A = rbf(epsilon,r);
DA = dxrbf(epsilon,r,dx);
D = DA/A;
Program 5.
Computing error for Rippa’s algorithm
% CostEpsilonDxRBF
function ceps = CostEpsilonDxRBF(epsilon,r,dx)
global rbf dxrbf
[m,n] = size(r);
A = rbf(epsilon,r);
rhs = dxrbf(epsilon,r,dx)’;
invA = pinv(A);
EF = (invA*rhs)./repmat(diag(invA),1,m);
ceps = norm(EF(:),2);
In this third RBF-PS approach, we generally employ the Wendland functions, as specified in Program 6. In this case, e signifies the shape parameter, r indicates the Euclidean distance between two grid points, and refers to its first derivative concerning x, among others.
Program 6.
Wendland C6 function and its derivatives
rbf = @(e,r) max(1-e*r,0).^8.*(32*(e*r).^3+25*(e*r).^2+8*e*r+1);
dxrbf = @(e,r,dx) -22*dx*e^2.*...
max(1-e*r,0).^7.*(16*(e*r).^2+7*e*r+1);
dyrbf = @(e,r,dy) -22*dy*e^2.*...
max(1-e*r,0).^7.*(16*(e*r).^2+7*e*r+1);
dxxrbf = @(e,r,dx) 22*e^2*max(1-e*r,0).^6.*...
(16*e^3*(r.^2+9*dx.^2).*r+3*e^2*(8*dx.^2-3*r.^2)-6*e*r-1);
dxyrbf = @(e,r,dx,dy) 528*e^4*dx.*dy.*...
max(1-e*r,0).^6.*(6*e*r+1);
dyyrbf = @(e,r,dy) 22*e^2*max(1-e*r,0).^6.*...
(16*e^3*(r.^2+9*dy.^2).*r+3*e^2*(8*dy.^2-3*r.^2)-6*e*r-1);
3. The Layerwise Theory
We introduce a simple and efficient layerwise shallow shell theory. A Mindlin shell is situated in the intermediate layer. Subsequently, we overlay an upper and a lower layer above and below the middle layer, guaranteeing that the displacements at the interfaces between the layers remain continuous. The lowest, medium, and highest levels are marked as 1, 2, and 3, accordingly.
3.1. Displacement Field
The displacement field encompasses nine degrees of freedom: three displacements of the mid-surface of the second layer, and six rotations of the normal to the mid-plane of each respective layer about the y and x axes. For clarity, we designate the displacement field as layer 2, also referred to as the middle layer or sandwich core. This field is characterized by the subsequent equation:
For layer 3, by imposing continuity of displacements at the layers 2–3, we obtain
For layer 1 (lower layer or lower sandwich skin), by imposing continuity of displacements at the layers 1–2, we obtain
In Equations (11)–(13), represents the thickness of layer k, and represents the z-coordinates for each layer k and is defined within the interval .
3.2. Deformations
In this shallow shell theory, we regard x and y as curvilinear coordinates, with and representing the radii of curvature in the and planes, respectively. The in-plane deformations may be defined as:
where the membrane constituents are the same throughout the three layers:
For every layer k, the bending deformations are described as:
The deflection components related to the radius of curvatures are given by:
The membrane-bending coupling components for layers 2, 3, and 1 are specified as follows:
For each layer k, the transverse shear deformations are calculated as follows:
3.3. Stresses
The current layerwise approach disregards transverse normal deformations by presuming a uniform transverse displacement across each layer. Disregarding for each orthotropic layer, the stress-strain relationships in the fiber’s local coordinate system can be described as:
The material coefficients are expressible in terms of the engineering constants, specifically the elastic coefficients , and :
This theory does not necessitate the application of shear correction factors. The stress-strain relations for each layer in shell coordinates are derived using material coefficients transformation rules as outlined by [5]
4. Equations of Motion
We can get the equations of motion from the dynamic form of the principle of virtual displacements:
The virtual strain energy , the virtual work performed by applied forces , and the virtual kinetic energy for a three-layer laminate are defined as follows:
In this context, quantities are defined as virtual. The symbol indicates the midplane of the laminate, while signifies the natural boundary. The variable q represents the external distributed load. The notation is used to denote time differentiation, and refers to the density of the material for layer k.
The virtual strain energy can now be expressed in terms of the stress resultants and bending moments as
where the in-plane stress resultants and bending moments are defined as
and where the out-of-plane stress resultants are defined as
The work done by the external applied forces is defined as
whereas the virtual kinetic energy is defined as
By gathering the coefficients of each virtual displacement and applying integration by parts, the dynamic equilibrium equations are derived by equating the coefficients of to zero individually over :
where the inertia moments are defined as
The equations of motion and boundary conditions will thereafter be interpolated and resolved as a system of linear equations for the static scenario, or as a generalized eigenvalue problem for free vibrations, utilizing the differentiation matrices delineated before
5. Numerical Examples
5.1. Spherical Shell in Bending
A laminated composite square spherical shell is examined, including a side length a and a thickness h, constructed from layers of uniform thickness with stacking sequences and . The shell experiences a bisinusoidal vertical pressure represented by the equation
where the coordinate system’s origin is positioned at the lower left corner of the midplane, and P denotes the maximum load at the shell’s center. The orthotropic material properties for each layer are specified as follows:
The transverse displacements are presented in normalized form as:
The shell is supported at all edges. Table 1 evaluates the accuracy of the current model for the scenario of a flat plate . We juxtapose the deflections derived from the three pseudospectral approaches (PS, as delineated in Section 2) with the LW analytical solution presented in [24] and the outcomes acquired utilizing two distinct shell finite elements: MITC4 and MITC9. The elements are derived from the Carrera Unified Formulation (CUF) and are elaborated upon in [25]. Different thickness ratios and laminations are evaluated. The findings in Table 1 indicate that the current approaches align well with the FEM solution in all instances.

Table 1.
Non-dimensional central deflection, for and cross-ply laminated plate under sinusoidal load.
Figure 1 illustrates the deformed shape of the plate, discretised with a grid, revealing a smooth deformation profile.
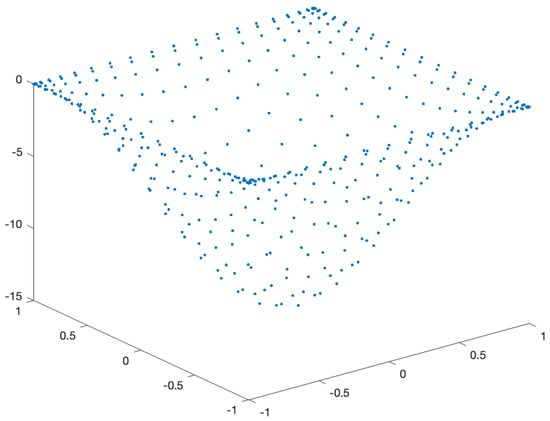
Figure 1.
Deformed shape of the cross−ply laminated plate discretised with points, before adimensionalisation, using the RBF-PS method in general grids.
Table 2 and Table 3 present a comparison of the static deflections derived from the current shell model with the outcomes of Reddy’s shell formulation, utilizing both first-order and third-order shear-deformation theories [2], in addition to the LW analytical solution from [24]. We examine nodal grids comprising , and points, alongside different values of and two values of (10 and 100), in addition to stacking sequences of the form for Table 2 and for Table 3. The findings from our three PS methods show strong concordance across different ratios when compared to Reddy’s higher-order results and the LW analytical solution.
Table 2.
Non-dimensional central deflection for a spherical shell (), variation with various number of grid points , for different ratios, and for a laminate.
Table 3.
Non-dimensional central deflection for a spherical shell (), variation with various number of grid points , for different ratios, and for a laminate.
5.2. Free Vibration of Spherical and Cylindrical Laminated Shells
This study examines nodal grids consisting of , and points. Table 4 (stacking sequence ) and Table 5 (stacking sequence ) present a comparison of the nondimensionalized natural frequencies derived from the current layerwise theory for various cross-ply spherical shells with the analytical solutions reported by Reddy and Liu [2], who investigated both first-order (FSDT) and third-order (HSDT) theories. The first-order theory often overestimates the fundamental natural frequencies of symmetric thick shells and symmetric shallow thin shells. The current method demonstrates strong concordance with the reference solutions, utilizing our three PS methods.
Table 4.
Nondimensionalized fundamental frequencies of cross−ply laminated spherical shells, , laminate ().
Table 5.
Nondimensionalized fundamental frequencies of cross−ply laminated spherical shells, , laminate ().
Table 6 displays the nondimensionalized natural frequencies derived from the current layerwise theory for cross-ply cylindrical shells featuring lamination schemes and . Our results were compared with the analytical solutions provided by Reddy and Liu Reddy and Liu [2], who employed both FSDT and HSDT theories. The comparison shows strong agreement across all PS methods, even with a limited number of grid points.
Table 6.
Nondimensionalized fundamental frequencies of cross−ply cylindrical shells, .
Figure 2 presents the eigenvalues (“eig”) for the initial four vibrational modes of a cross-ply laminated plate, represented by , with a laminate configuration of , utilizing a grid of points and a ratio of .
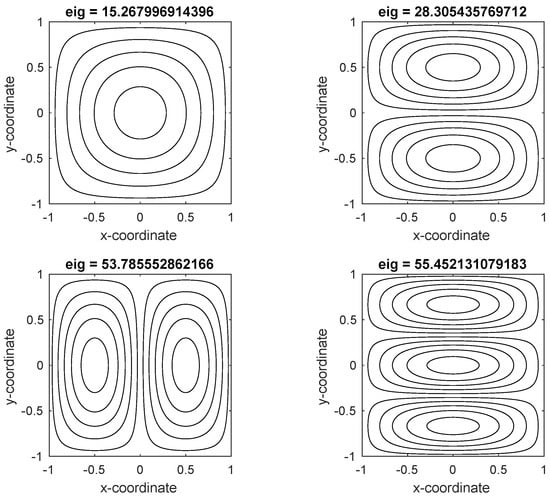
Figure 2.
Illustration of the first 4 vibrational modes of cross−ply laminated plate, , laminate () grid points, .
6. Concluding Remarks
This paper presents a novel layerwise shell theory for laminated orthotropic elastic shells. This theory employs collocation with radial basis functions (RBF) in a pseudospectral framework, presented in three formulations, to tackle the equations of motion and boundary conditions. Results for static deformations and natural frequencies are presented and compared with existing sources. Our meshless approaches demonstrate high effectiveness in analyzing static deformations and free vibrations of laminated composite shells. The benefits of pseudospectral interpolation schemes encompass the lack of a mesh, ease of discretizing boundary conditions, and the formulation of equilibrium or motion equations. The results indicate that the static displacements and natural frequencies derived from the three pseudospectral methods align closely with analytical and reference solutions.
Author Contributions
Conceptualization: S.C.F.F. and J.C.; methodology: S.C.F.F., J.C. and A.J.M.F.; software: S.C.F.F. and A.J.M.F.; validation: S.C.F.F. and A.J.M.F.; writing—original draft preparation, S.C.F.F. and A.J.M.F.; supervision: J.C. and A.J.M.F.; All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
The original contributions presented in the study are included in the article, further inquiries can be directed to the corresponding author.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Pandya, B.N.; Kant, T. Higher-order shear deformable theories for flexure of sandwich plates-finite element evaluations. Int. J. Solids Struct. 1988, 24, 419–451. [Google Scholar] [CrossRef]
- Reddy, J.N.; Liu, C.F. A higher-order shear deformation theory of laminated elastic shells. Int. J. Eng. Sci. 1985, 23, 319–330. [Google Scholar] [CrossRef]
- Touratier, M. An efficient standard plate theory. Int. J. Eng. Sci. 1991, 29, 901–916. [Google Scholar] [CrossRef]
- Mindlin, R.D. Influence of rotary inertia and shear in flexural motions of isotropic elastic plates. J. Appl. Mech. 1951, 18, 31–38. [Google Scholar] [CrossRef]
- Reddy, J.N. Mechanics of Laminated Composite Plates; CRC Press: New York, NY, USA, 1997. [Google Scholar]
- Carrera, E. Historical review of zig-zag theories for multilayered plates and shells. Appl. Mech. Rev. 2003, 56, 287–308. [Google Scholar] [CrossRef]
- Carrera, E. Developments, ideas, and evaluations based upon Reissner’s Mixed variational Theorem in the modelling of multilayered plates and shells. Appl. Mech. Rev. 2001, 54, 301–329. [Google Scholar] [CrossRef]
- Carrera, E. C0 Reissner-Mindlin multilayered plate elements including zig-zag and interlaminar stress continuity. Int. J. Numer. Methods Eng. 1996, 39, 1797–1820. [Google Scholar] [CrossRef]
- Kansa, E.J. Multiquadrics- A scattered data approximation scheme with applications to computational fluid dynamics. I: Surface approximations and partial derivative estimates. Comput. Math. Appl. 1990, 19, 127–145. [Google Scholar] [CrossRef]
- Ferreira, A.J.M. A formulation of the multiquadric radial basis function method for the analysis of laminated composite plates. Compos. Struct. 2003, 59, 385–392. [Google Scholar] [CrossRef]
- Ferreira, A.J.M.; Roque, C.M.C.; Martins, P.A.L.S. Analysis of composite plates using higher-order shear deformation theory and a finite point formulation based on the multiquadric radial basis function method. Compos. Part 2003, 34, 627–636. [Google Scholar] [CrossRef]
- Hardy, R.L. Multiquadric equations of topography and other irregular surfaces. Geophys. Res. 1971, 176, 1905–1915. [Google Scholar] [CrossRef]
- Hardy, R.L. Theory and applications of the multiquadric-biharmonic method: 20 years of discovery. Comput. Math. Applic. 1990, 19, 163–208. [Google Scholar] [CrossRef]
- Kansa, E.J. Multiquadrics- A scattered data approximation scheme with applications to computational fluid dynamics. II: Solutions to parabolic, hyperbolic and elliptic partial differential equations. Comput. Math. Appl. 1990, 19, 147–161. [Google Scholar] [CrossRef]
- Ferreira, A.J.M. Analysis of composite plates using a layerwise deformation theory and multiquadrics discretization. Mech. Adv. Mater. Struct. 2005, 12, 99–112. [Google Scholar] [CrossRef]
- Ferreira, A.J.M. Polyharmonic (thin-plate) splines in the aalysis of composite plates. Int. J. Mech. Sci. 2004, 46, 1549–1569. [Google Scholar] [CrossRef]
- Fantuzzi, N.; Tornabene, F.; Bacciocchi, M.; Ferreira, A.J.M. On the Convergence of Laminated Composite Plates of Arbitrary Shape through Finite Element Models. J. Compos. Sci. 2018, 2, 16. [Google Scholar] [CrossRef]
- Moreira, J.A.; Moleiro, F.; Araújo, A.L.; Pagani, A. Active aeroelastic flutter control of supersonic smart variable stiffness composite panels using layerwise models. Compos. Struct. 2024, 343, 118287. [Google Scholar] [CrossRef]
- Gao, Y.S.; Cai, C.S.; Huang, C.Y.; Zhu, Q.H.; Schmidt, R.; Zhang, S.Q. A compressible layerwise third-order shear deformation theory with transverse shear stress continuity for laminated sandwich plates. Compos. Struct. 2024, 338, 118108. [Google Scholar] [CrossRef]
- Fornberg, B. A Practical Guide to Pseudospectral Methods; Cambridge Monographs on Applied and Computational Mathematics; Cambridge University Press: Cambridge, UK, 1996. [Google Scholar]
- Trefethen, L.N. Spectral Methods in MatLab; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2000. [Google Scholar]
- Rippa, S. An algorithm for selecting a good value for the parameter c in radial basis function interpolation. Adv. Comput. Math. 1999, 11, 193–210. [Google Scholar] [CrossRef]
- Ferreira, A.J.M.; Fasshauer, G.E. Computation of natural frequencies of shear deformable beams and plates by a RBF-Pseudospectral method. Comput. Methods Appl. Mech. Eng. 2006, 196, 134–146. [Google Scholar] [CrossRef]
- Carrera, E. Multilayered Shell Theories Accounting for Layerwise Mixed Description, Part 2: Numerical Evaluations. Aiaa J. 1999, 37, 1117–1124. [Google Scholar] [CrossRef]
- Cinefra, M.; Kumar, S.K.; Carrera, E. MITC9 Shell elements based on RMVT and CUF for the analysis of laminated composite plates and shells. Compos. Struct. 2019, 209, 383–390. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).