1. Introduction
Discontinuous carbon fiber-carbon matrix (C/C) composites dispersed Si/SiC matrix composites (hereafter denoted as (C/C)/Si/SiC composites) have been expected for applications of light-weight structural components, such as car/motorbike brake disks [
1,
2], emergency brakes for elevators [
3], and high-performance wear components, etc. Mechanical performances of (C/C)/Si/SiC composites have been extensively studied [
4], and those reports have shown unique mechanical performances of the composites, which are difficult to obtain for monolithic ceramics and metals. In application, (C/C)/Si/SiC composites are subjected to various kinds of mechanical damage. Anomaly such as damage should be detected at maintenance periods, where it is decided whether the components are continuously used or replaced. Suitable nondestructive evaluation (NDE) is needed to maintain the components in their safe condition.
The characteristic properties of (C/C)/Si/SiC should be considered for NDE. It is known that (C/C)/Si/SiC composite exhibits extremely low fracture toughness under the assumption of linear elastic fracture mechanics [
5]. In fact, the value is close to monolithic engineering ceramics [
6]. Therefore, once a composite has a source of some stress concentration where tensile/shear loads are applied, then the composite falls into a dangerous situation as a component-bearing load because the fracture strength of the composite becomes ~
:
is the effective crack size [
7]. Here, the effective crack size,
, means the length scale for possible application of continuum mechanics (at least ten times larger than the microstructural units [
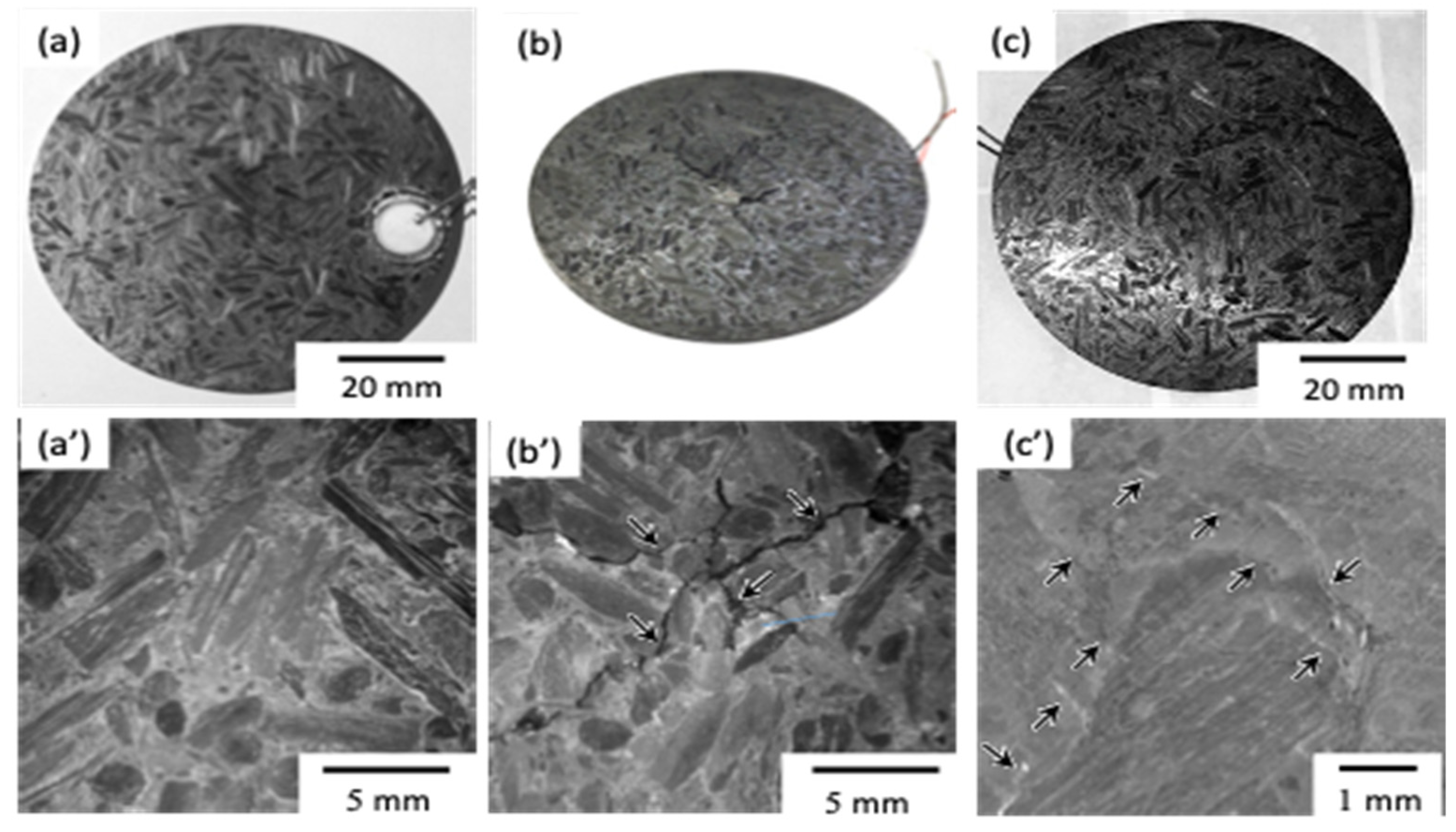
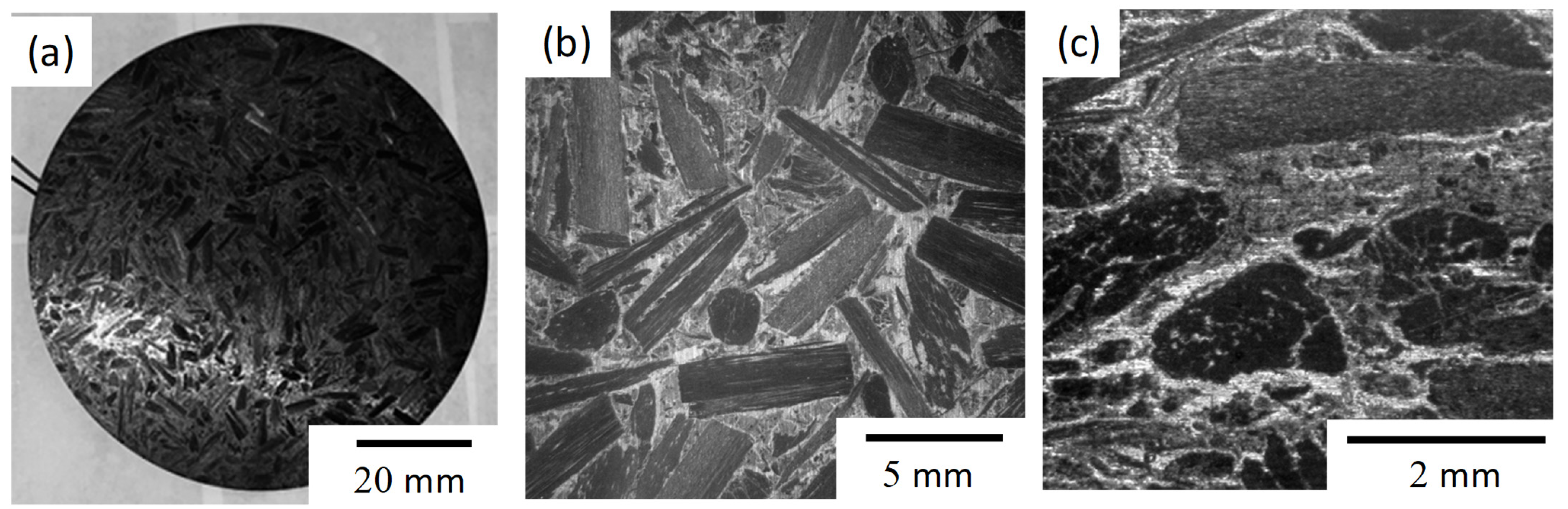
7]). The microstructure of the composites is complicated: the structure consists of four major phases, C/C, Si, SiC, and C/SiC [
8], and the crack stability in the composite is affected by the geometrical arrangement of these four major phases [
8]. In addition, many microcracks are formed in the as-fabricated condition of the composites due to residual stress, which originates from thermal expansion mismatches and phase transformations of Si/SiC, etc. Dangerous mm-order damage zones including cracks close to
~ mm order should be detected with a relatively simple process for safe operation.
Some nondestructive evaluation (NDE) methods have been applied for (C/C)/Si/SiC composite components. The Eddy current method could detect the progress of damage during service, and convenient test equipment has been commercially available [
9]. Pulse-phase thermography could give inhomogeneous microstructure and is effective for a thin specimen [
10]. When a component is thick or does not have a constant thickness, overwrapping different local thermal conductivity makes it difficult to analyze thermal imaging results. In addition, the technique is too sensitive concerning the environmental temperature and not easy to conduct, unlike other conventional tests. While each evaluation method has merits and demerits, no method is better in every way possible. Novel NDE methods for (C/C)/Si/SiC components still need to be developed.
Recently, the authors applied simple vibration methods for (C/C)/Si/SiC composite [
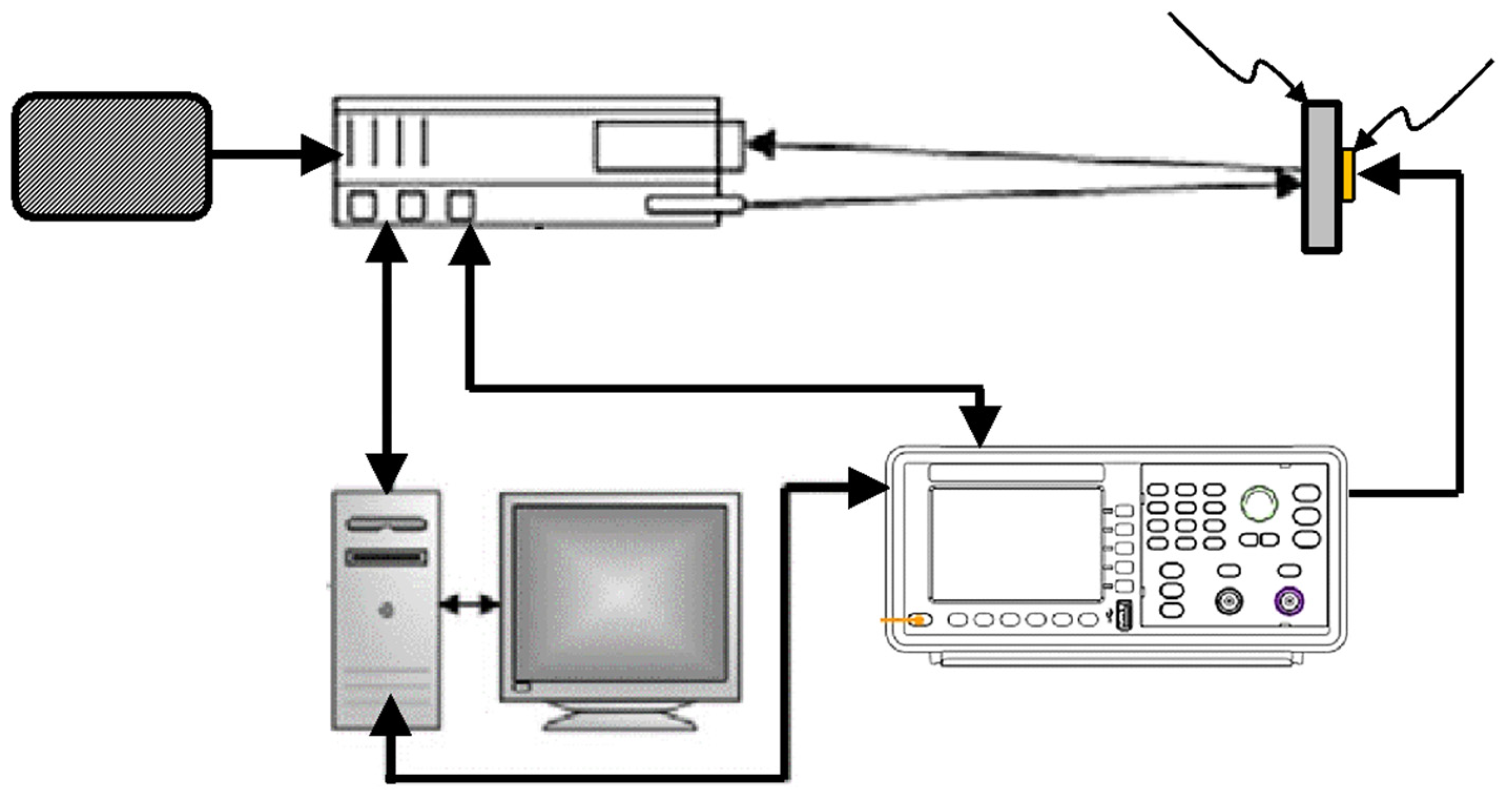
11]. The vibration-resonance frequency relation has been used for detection of nonuniformity, local damage, quality assessment of rotating components, etc. Laser holographic technique allows very sensitive detection of surface displacement images under forced vibration mode. Using the equipment and seeping vibration frequencies, it is possible to measure two-dimensional surface displacements of components with a nanometer-order displacement resolution. The method is highly reproducible and sensitive to the local density change of the target component.
Data processing/image analysis of the obtained vibration image allows for detection of local damage; however, the method only gives enhanced contrast of the detected images, and it is difficult to incorporate adequate threshold levels to ensure safe operation of the composite. Recently, AI is expected to use the criteria determination of available NDE methods [
12]. However, the application of AI technologies usually needs a sufficient “database,” which is very hard to prepare. Therefore, the application of AI is still limited and remains at conceptual levels. Typically, in the field of (C/C)/Si/SiC the preparation of a database is very difficult because of limited data.
The present study has been focused on the application of “database free” AI technology for damage detection of (C/C)/Si/SiC composite. Discussions are made on the future application procedure of the present method. For safety applications, damage caused by mechanical impact should be clearly detected and classified as either “safe” or “dangerous” damage. Reports have shown that the impact damage of fiber-reinforced ceramic matrix composite strongly depends on the local damage accumulation behavior of the composites.
2. Macroscopic-Level Nondestructive Evaluation Using Vibration Modes
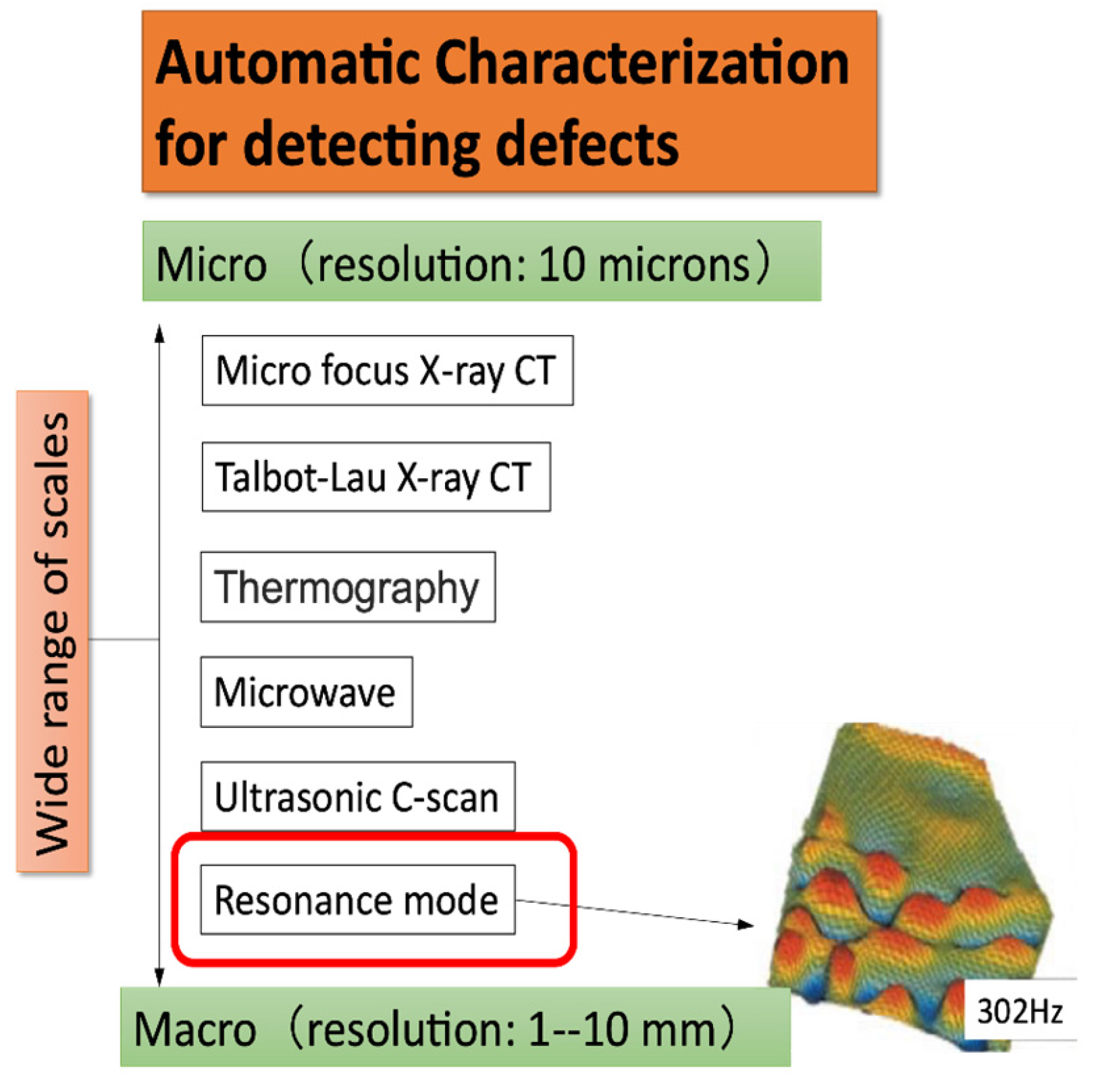
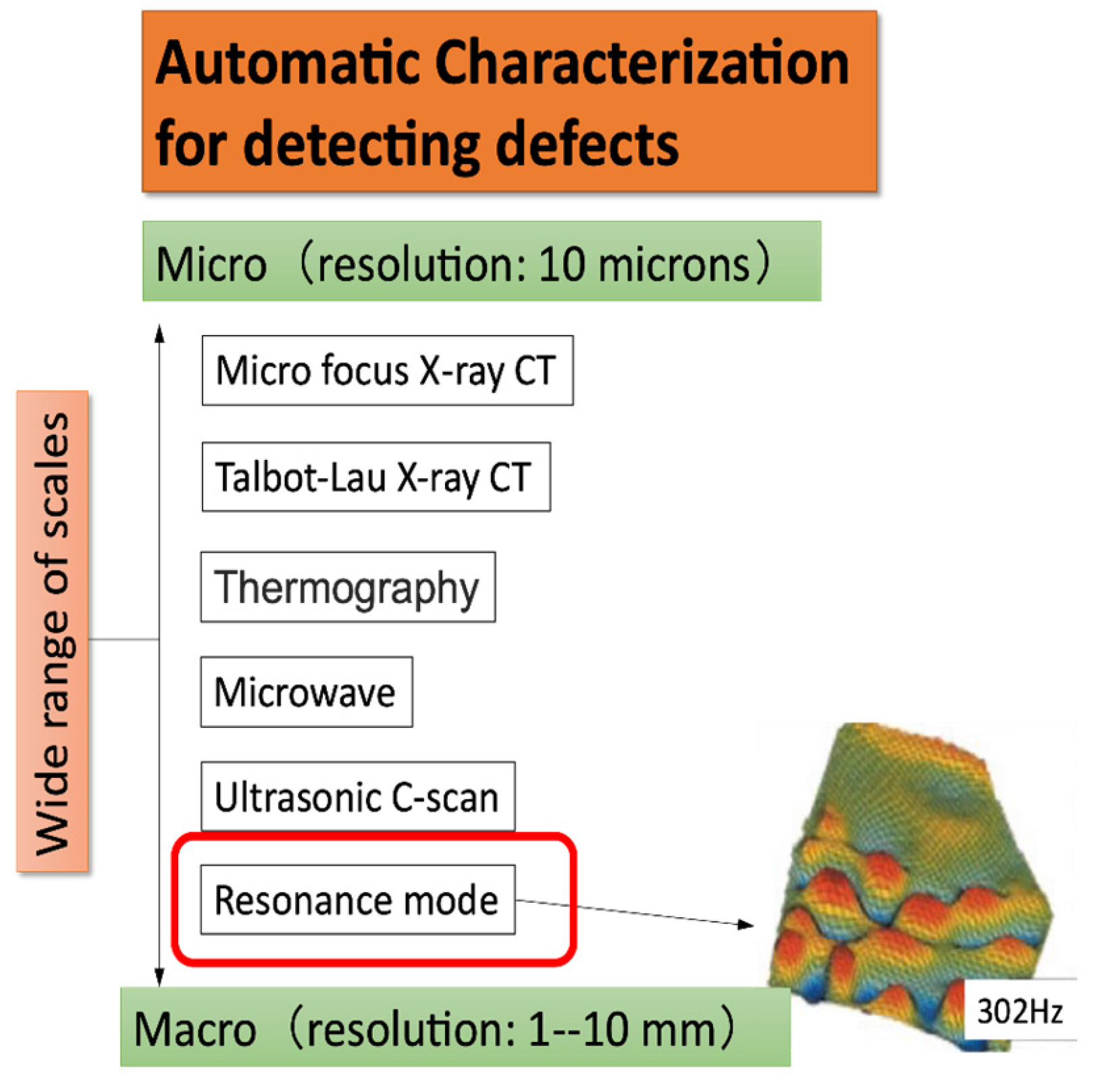
As mentioned in the introduction, yet another NDE method is required for evaluating disparate aspects that (C/C)/Si/SiCs have in various scales (
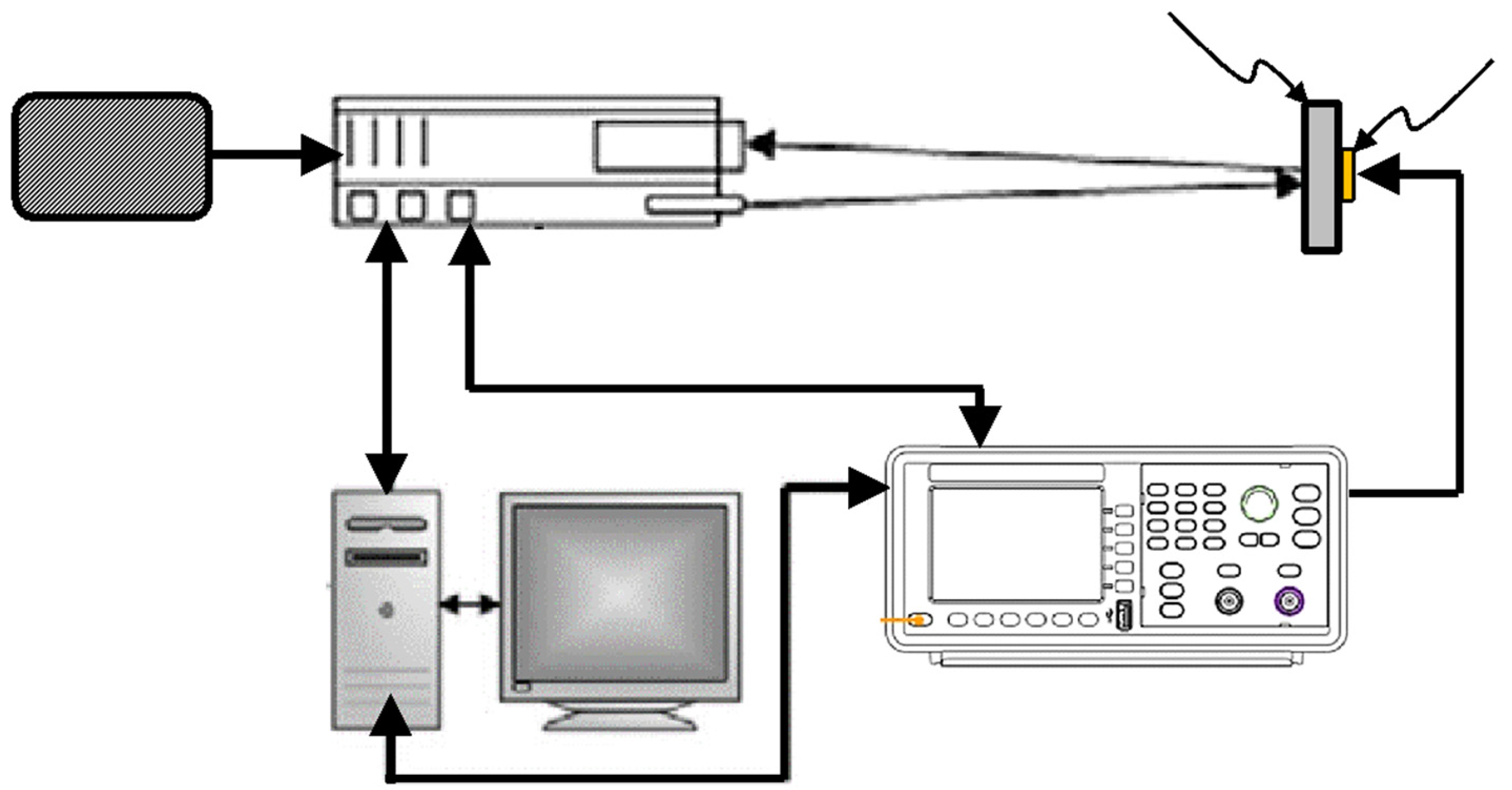
Figure 1). The focus of this paper is the detection of macroscopic-level areas that deviate from the normal state with respect to some physical properties such as elasticity and strength. We assume that the resolution for the detection is mm-order (approx. 1–10 mm), which the measurement system of vibration and resonance modes is sufficiently capable of handling. The special resolution depends on some parameters, such as the elasticity and the vibration frequency. The laser vibrometer, which we used, observes the displacements in the Z-axis direction on the XY plane by irradiating the laser to the surface while the object is vibrated with a particular frequency.
We assume that sound pressure is uniform throughout the given space. In this scenario, the displacement map is uniquely determined by its sound frequency. Various patterns of the displacement maps are observed by changing the frequencies. In this paper, we call the observed displacement map for a frequency f a vibration mode for f. Several peaks are observed with respect to the squared means of the modes when the frequencies are changed. Since those peaks indicate resonance, the mode where a frequency generates a peak is called a resonance mode.
The physical properties, such as elastic modulus, locally change if the deviation occurs in some areas due to damage in the components. Those changes cause disturbances in the patterns of the vibration modes. If we recognize the irregular changes of the vibration pattern correctly, it is possible to detect the areas that have a shift of physical properties, which means damage of some kind in the component. However, solving this type of inverse problem is not feasible in most cases by numerical approaches such as finite element methods. So far, because we need to construct some physical property changes from the variations of the modes, no particular methods are yet known to solve them reliably in a systematic way. In addition, it is difficult to extract the precise frequencies that are useful for damage detection within the range specified. It is not realistic to examine manually what frequencies are most effective for specifying the damaged area. Automation is required from a practical perspective. The ideal conditions that our approach should satisfy are summarized as follows:
For some frequencies, the irregular areas are extracted from the image of the vibration mode when the object is damaged. Irregular areas denote the areas deviating from regular wave patterns that non-damaged objects should have;
For any frequencies, no areas are extracted when the object is non-damaged or has no significant deviations in terms of physical properties.
Note that the deviation of physical properties should be close to the surface where the vibration mode is measured because, generally speaking, the vibrometer measures the displacement only from a particular direction.
We need to define the regular wave patterns in (1). However, it is difficult to define them in an explicit way, such as numerical conditions on hand-made features. Instead, we utilize deep neural networks to learn the patterns that non-damaged objects normally have. Those patterns are learned from the data of the various modes, or the displacement images of many frequencies.
3. Methodology
3.1. Detection of Irregular Patterns on Vibration Modes with Auto-Encoders
The methods of anomaly detection, or outlier detection, are recently more successful in accurately detecting higher-level anomalies, because of the wide development of deep learning techniques [
13,
14]. Various kinds of data such as images, sounds, texts, and numerical features are considered as inputs for anomaly detection in general. Among them, it had been difficult to detect anomalies from rich data that contain abstract information, such as images, until deep learning emerged and was developed. Convolutional deep neural networks (CNNs) are one of the well-known neural architectures which are known to be superior for most image-related tasks such as image recognition and segmentation [
15,
16]. CNNs generally have multiple layers that transform input tensors and disentangle them sequentially so that the target task becomes solvable. The transformed vector/tensor embeddings of images are obtained by feeding the images into the layers of the trained CNNs. For instance, if a CNN is trained for some image classification tasks, the output vectors of the penultimate layer naturally distribute clusters into the task’s categories.
Auto-encoders are the neural architecture that is applicable to anomaly detection for images [
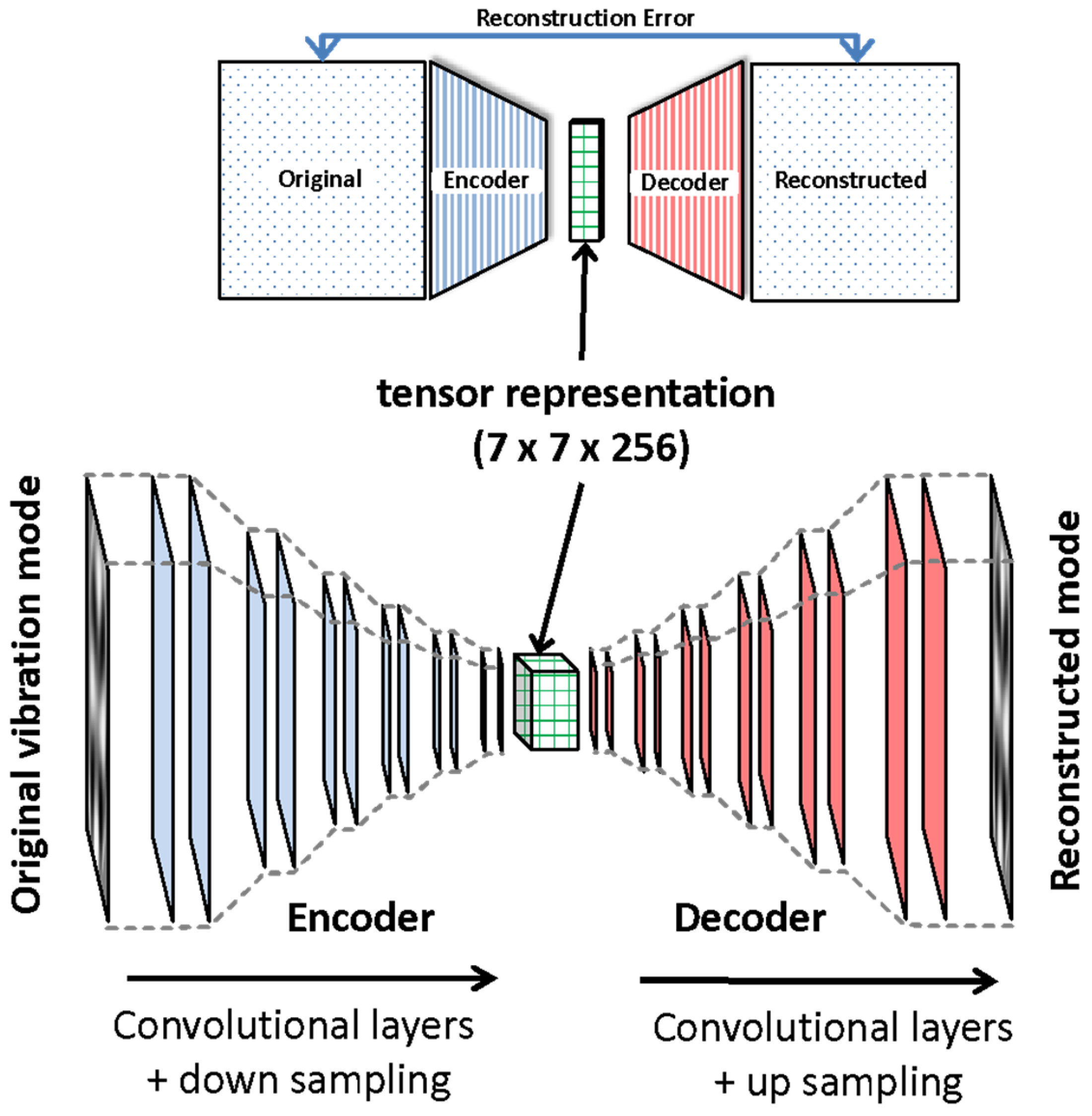
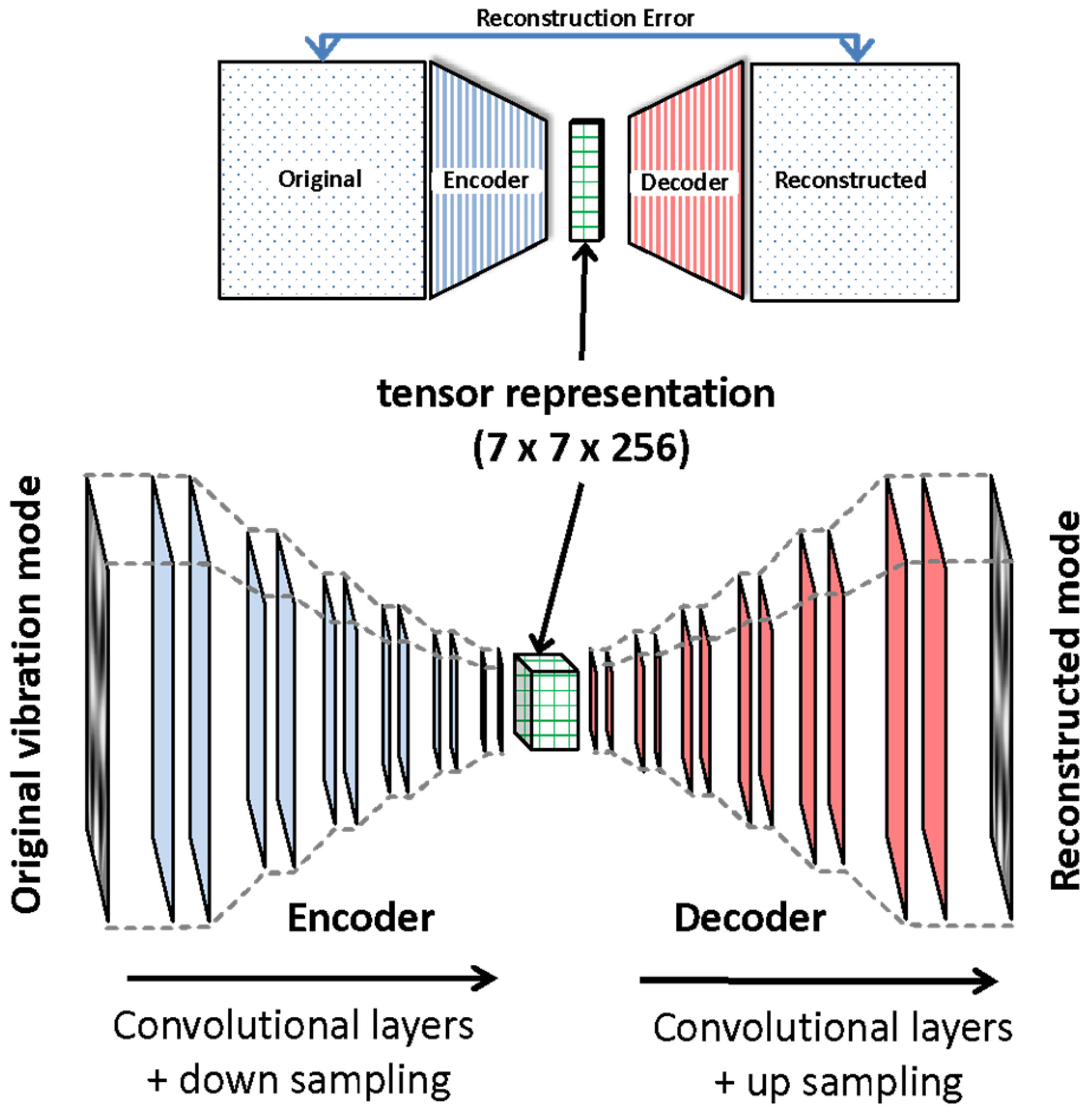
17]. Auto-encoders generally have two parts of neural networks called encoders and decoders (
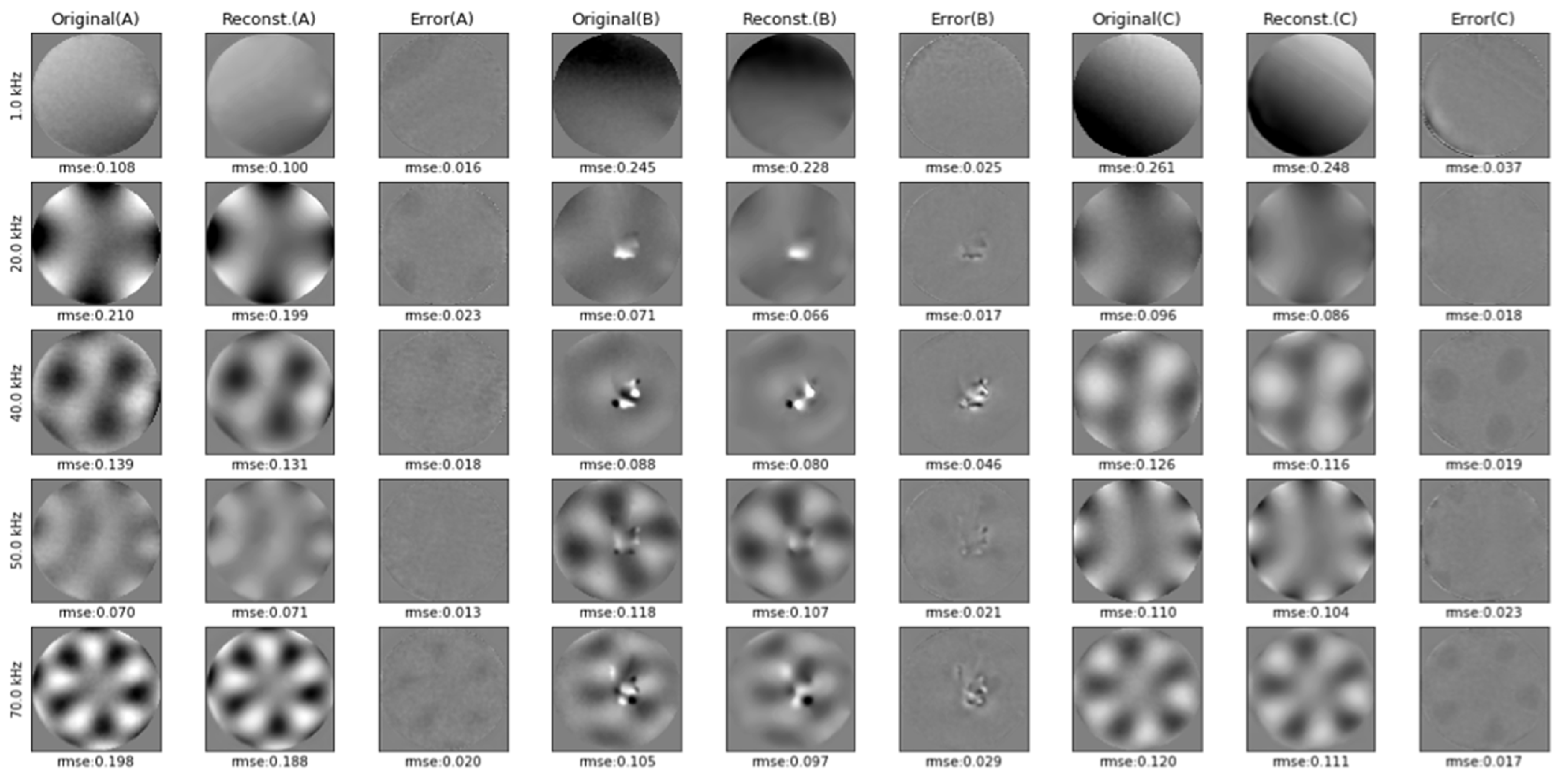
Figure 2). For our purposes, the encoder inputs are the images of the normal, or non-damaged, vibration modes. The encoder outputs tensors that retain sufficient information to cope with the task. The decoder reconstructs and outputs an image similar to the original vibration mode from the tensors the encoder outputs. The task of both the encoder and the decoder is to regenerate the original images as closely as possible. The loss is the difference between the reconstructed image and the image from the original vibration mode. We usually take the mean squared error between the two images as the loss function. Both the encoder and the decoder are trained to minimize the loss.
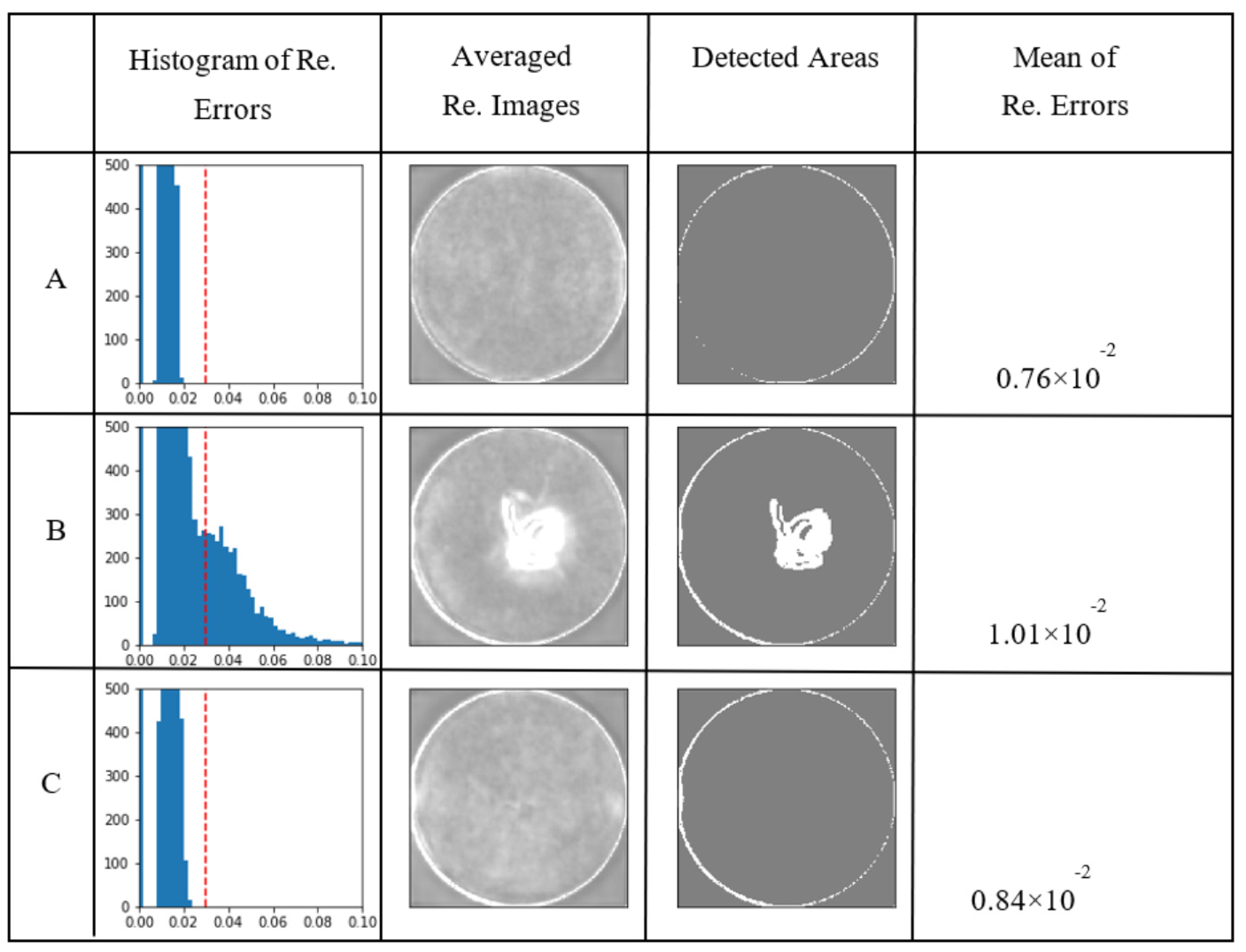
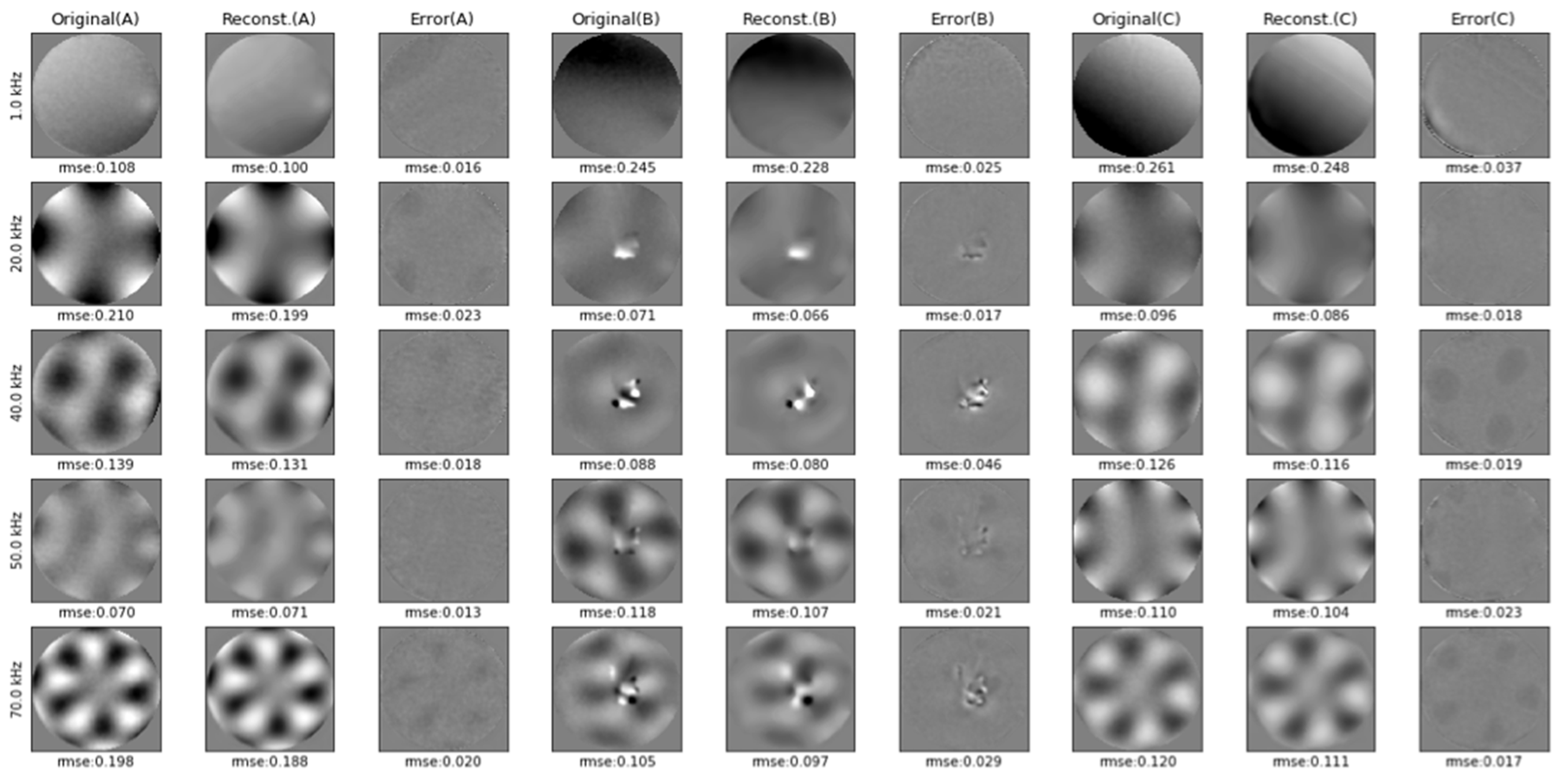
We call the tensor between the encoder and the decoder the tensor representation. The size of the tensor representation is smaller than that of the original images. This setting makes the tensor representation the funnel of information. Being the bottleneck forces the tensor representation to lose insignificant information that is rarely contained in the images of the dataset, which is the set of regular vibration modes. As a result, if the input image has some irregular patterns of vibration modes, the trained network is not able to regenerate it correctly. Its reconstruction error mostly becomes larger because the tensor representation filters information that comes from the irregularity. By measuring the reconstruction errors, we can estimate the extent of the irregularity of input patterns.
3.2. Convolutional Auto-Encoder for Detecting Irregular Patterns
Instead of using fully connected layers in auto-encoders, we use convolutional layers for both the encoder and the decoder [
18] (
Figure 2). The convolution operation of each single layer has advantages in capturing local features rather than taking all input signals into account. Convolution operations are especially suitable for our purpose because the regular vibration patterns have local and low-level characteristics rather than global features. In the encoder, the convolutions do not change the size of the input images. On the other hand, the down-sampling operations reduce the size of the input to encourage the output tensors to dispose of unimportant information. By repeating convolutions and down-samplings, the encoder can obtain sophisticated embedding vectors that have efficient information. Since the purpose of our network is to reconstruct the regular patterns of inputs, we do not insert any fully connected layers in the network, although the final layer of the encoder is usually preset to a fully connected layer [
19]. Thus, our tensor representation is a third-order tensor rather than a vector.
The hyperparameters and the detailed settings of the convolutional auto-encoder are shown in
Table 1. The value of each pixel in the input image represents the z-axis displacement of a given vibration mode. The image is processed by ten convolutional and five down (or up) sampling layers in each sub-network. Each sampling layer approximately halves (or doubles) the scale of the input image. Two convolutional layers and a sampling layer are applied alternately. The tensor representation of this convolutional auto-encoder has the shape of 7 × 7 × 256, which is the bottleneck of the whole network. The training dataset consists of vibration modes measured on non-damaged specimens for all the frequencies within a given range, e.g., 1–100 kHz. The signals are normalized so that the means are 0 and the standard deviations are 1. The normalization is completed for both the XY plane and the frequencies within the given range, because the mean of the displacements significantly increases when the frequency is close to a resonance frequency.
3.3. Generating Training Data
The proposed auto-encoder is trained using normal patterns of vibration modes in the data set as mentioned above. Since a sufficiently large amount of data are generally required for training neural networks, a similar number of specimens is usually required as well for stable training. Fortunately, because various patterns of vibration modes are observed by changing the frequency, a sufficiently large number of samples can be obtained from only a few normal specimens prepared for making the dataset. In fact, in the experiments in this paper, auto-encoders are trained only from the data collected from a single normal specimen. We measure vibration modes while increasing the frequency within a given range and add them to the dataset. For instance, suppose that we need to make 1000 samples as the dataset for training and to observe the vibration modes for the frequency band within the range of 1–100 kHz. After slicing the bandwidth of 1–100 into 1000 at regular intervals, the vibration mode is measured at each frequency. The obtained 1000 vibration modes have various different patterns despite that they are observed from a single specimen. As long as the specimen is normal, those patterns are homogeneous and unique with respect to regularity.
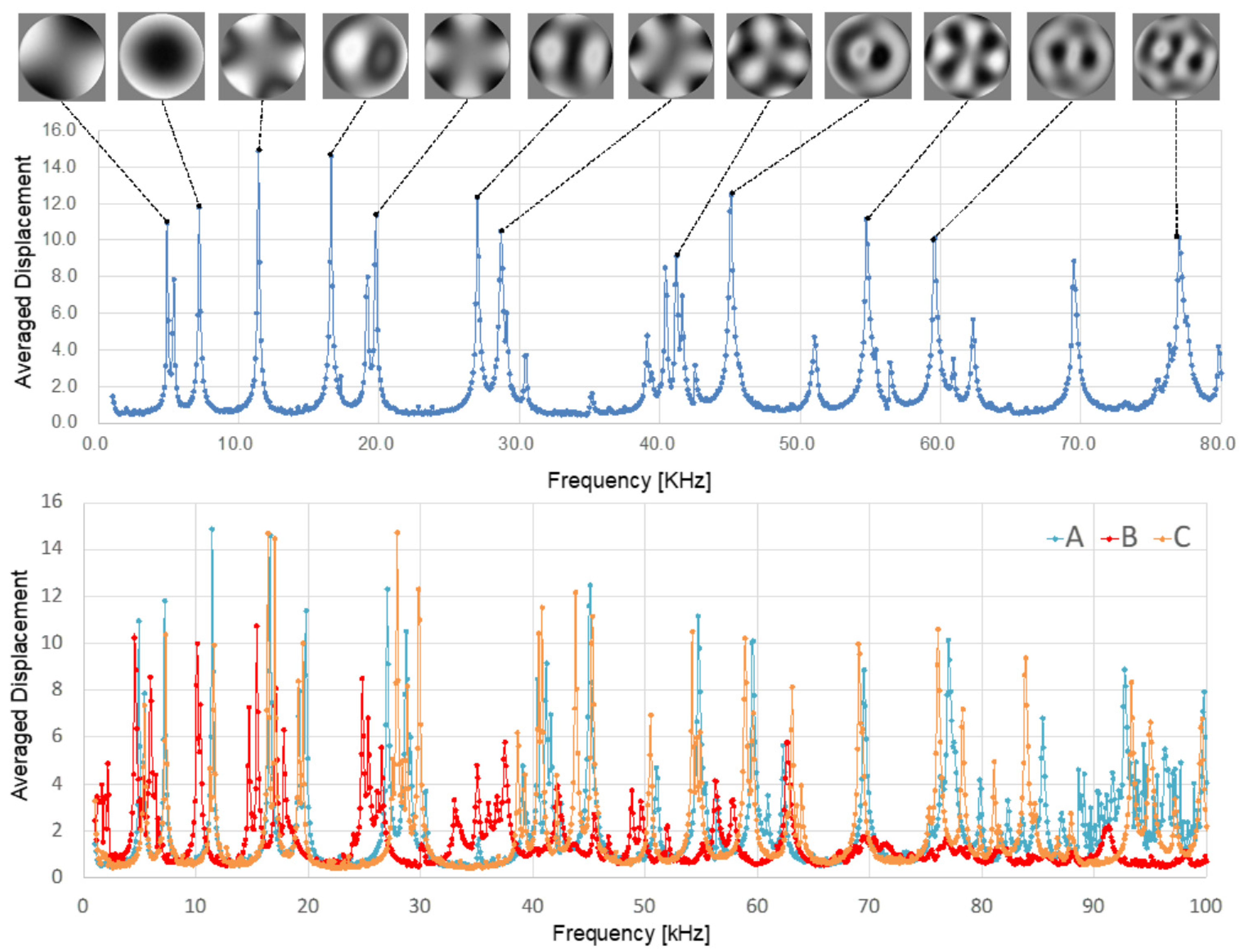
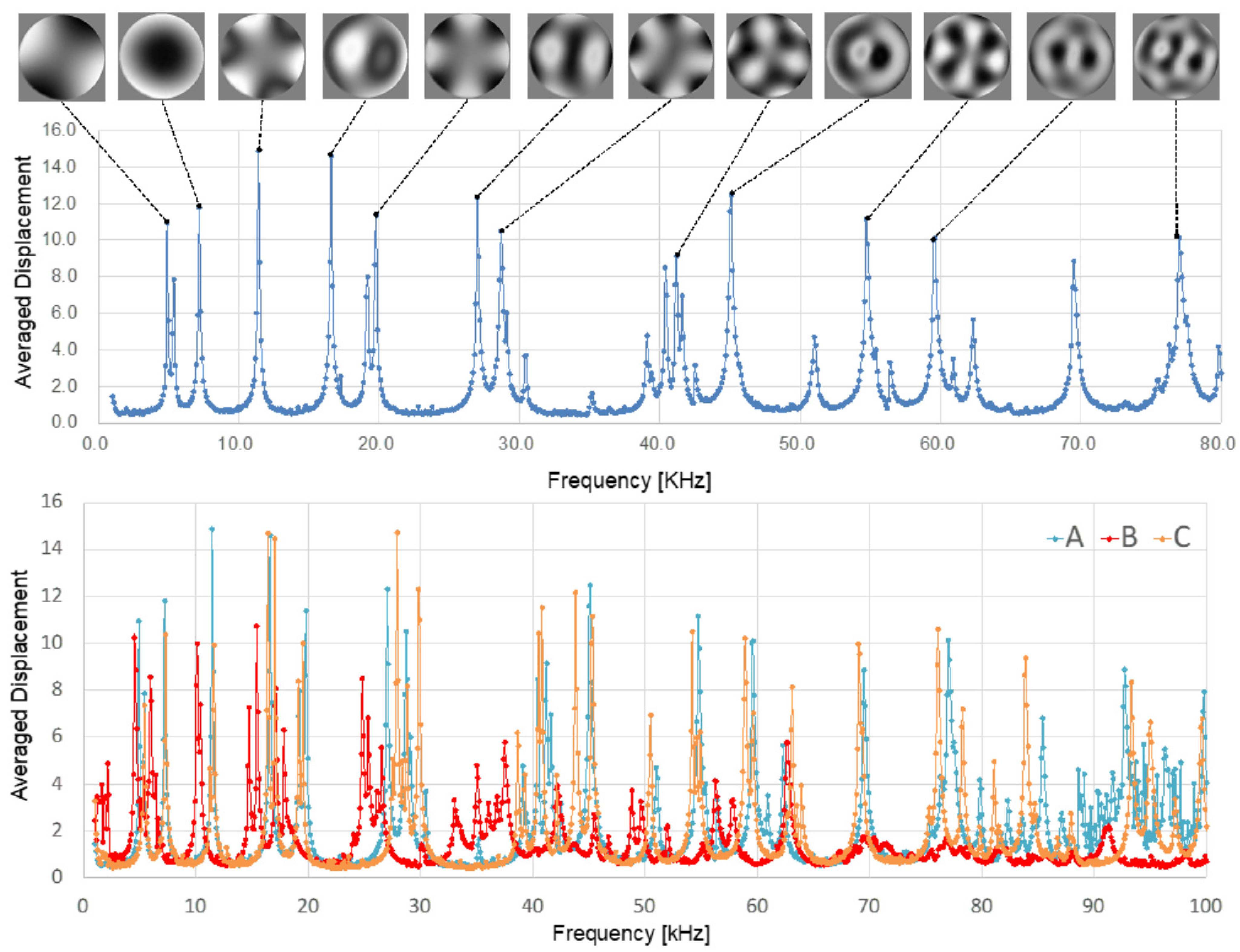
Figure 3 shows the averaged displacement of the vibration mode as a function of the vibration frequency. The data are obtained from a normal circular disk-shaped specimen (see
Section 4.1). Peaks in the graph indicate resonance. It can be seen that each resonant frequency has a completely different waveform. Because the pattern changes continuously when we change the frequency, vibration modes that are not resonant also have various patterns. Changing the frequency enables us to successfully obtain various different patterns where normal specimens are characterized. As the images in
Figure 3 (top) show, every mode forms a pattern that has some common unique characteristics, which are implicitly learned by training the model. Since a non-damaged specimen should have these characteristics, the reconstruction error tends to be sufficiently small. This fact makes it possible to use the reconstruction error as a measure of irregularity for all specimens, even if they do not have the same vibration modes as the specimen that is used for obtaining the training data.
On the other hand,
Figure 3 (bottom) shows the difference in resonance frequencies for different specimens. As shown in the figure, it is not easy to infer whether a specimen is damaged or not from the resonance frequency alone. The shapes of specimens and the average physical properties of them significantly affect their resonance conditions. Slight differences in thickness, shape, etc., can change the distribution of the resonance frequencies. In addition, it is unknown to what extent damage to a small part of the specimen affects the resonance. Even if the change of the resonance frequencies can be calculated by simulation from the detailed observations of damage, it is still unfeasible to identify the damaged area from the distribution of the resonance frequencies because of the difficulty of inverse problems.
3.4. Advantages of Proposed Method
We emphasize that one of the advantages of the proposed method is that we do not need to prepare a large number of specimens. Since a large number of sample images can be obtained by changing the frequency, deep neural networks that are sufficiently accurate for the purpose of detecting damages can be trained from a small number of specimens. In addition, although the time required for detection depends on the performance of computers or GPUs, it can be completed in a few milliseconds per image with a typical high-performance GPU. Therefore, even if a couple of hundred frequency scans are required, the total computation time is less than one second.
6. Conclusions
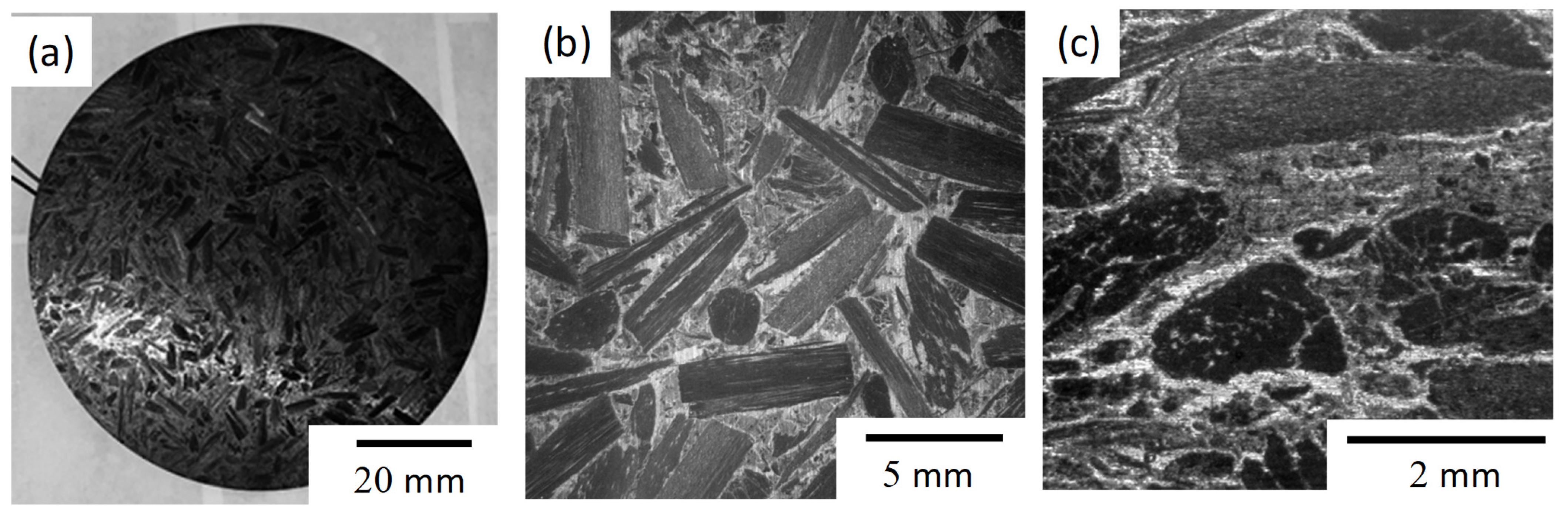
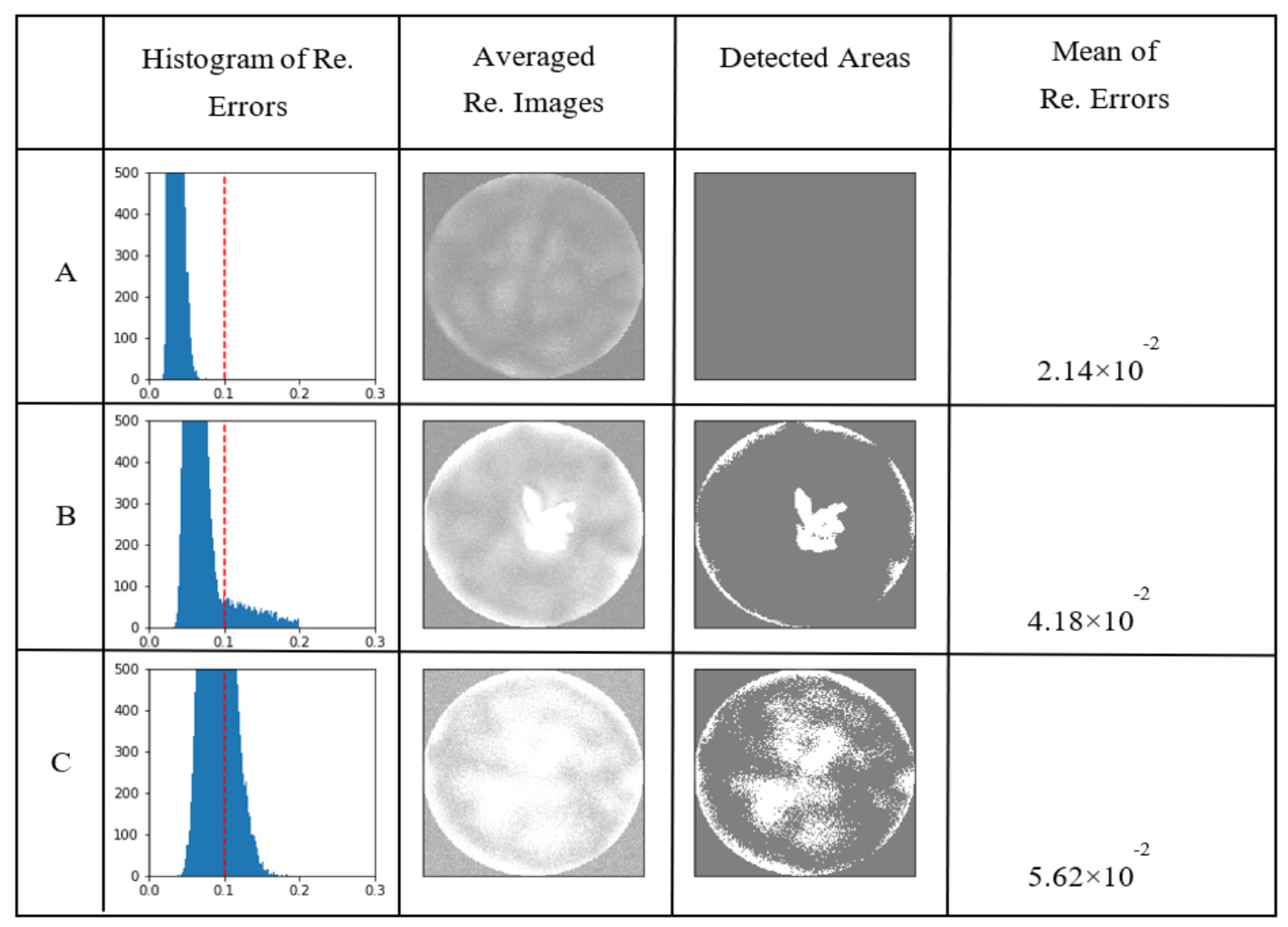
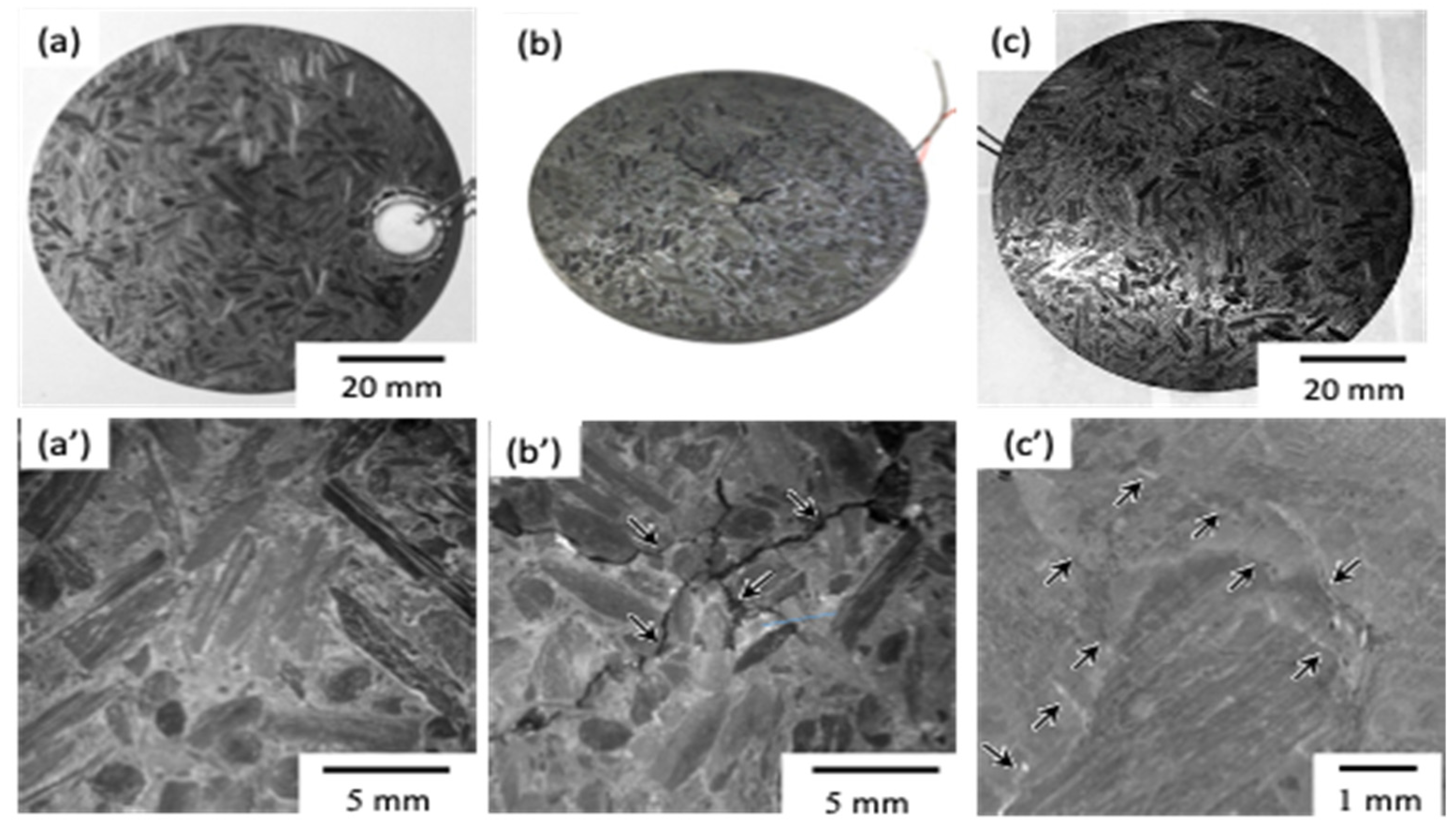
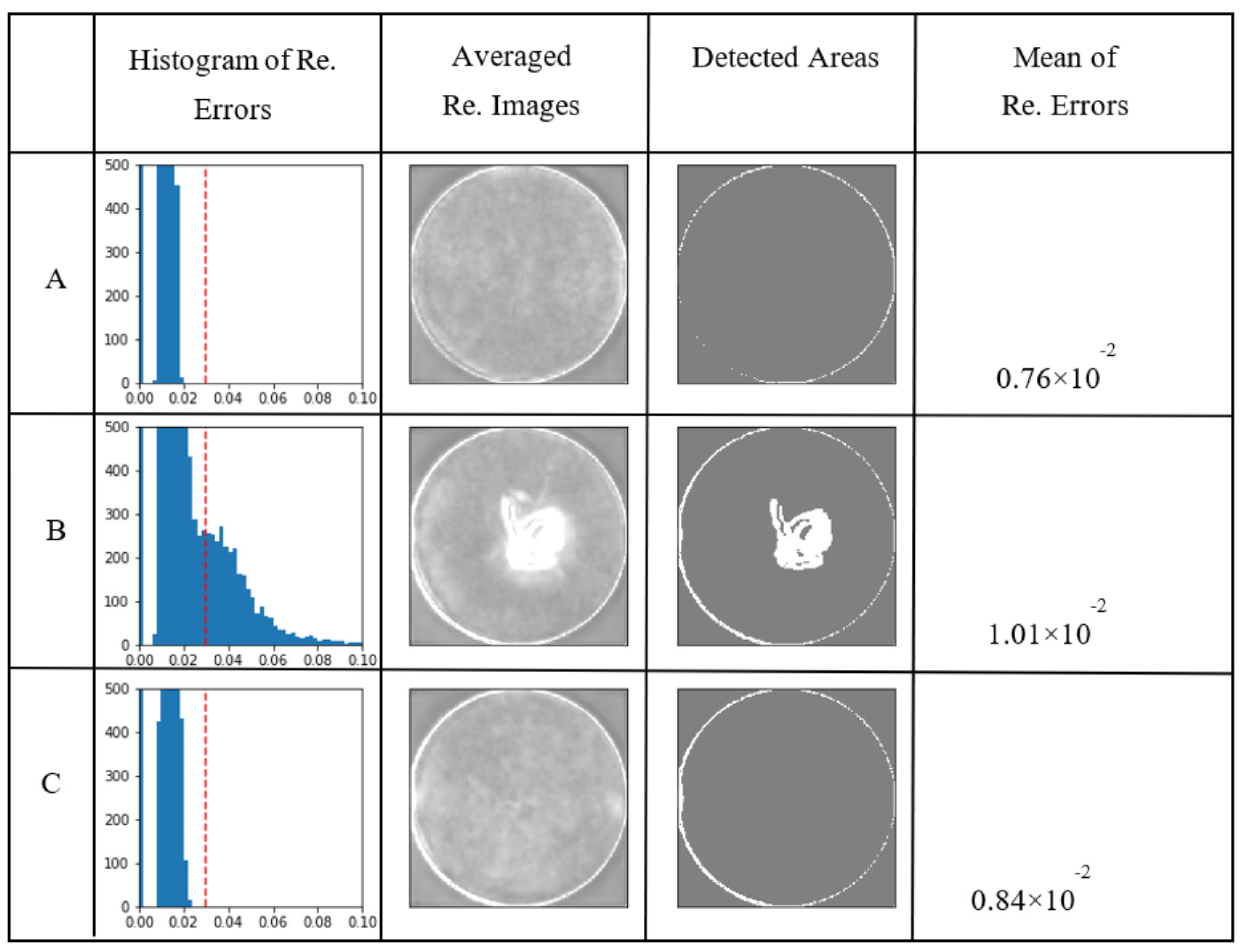
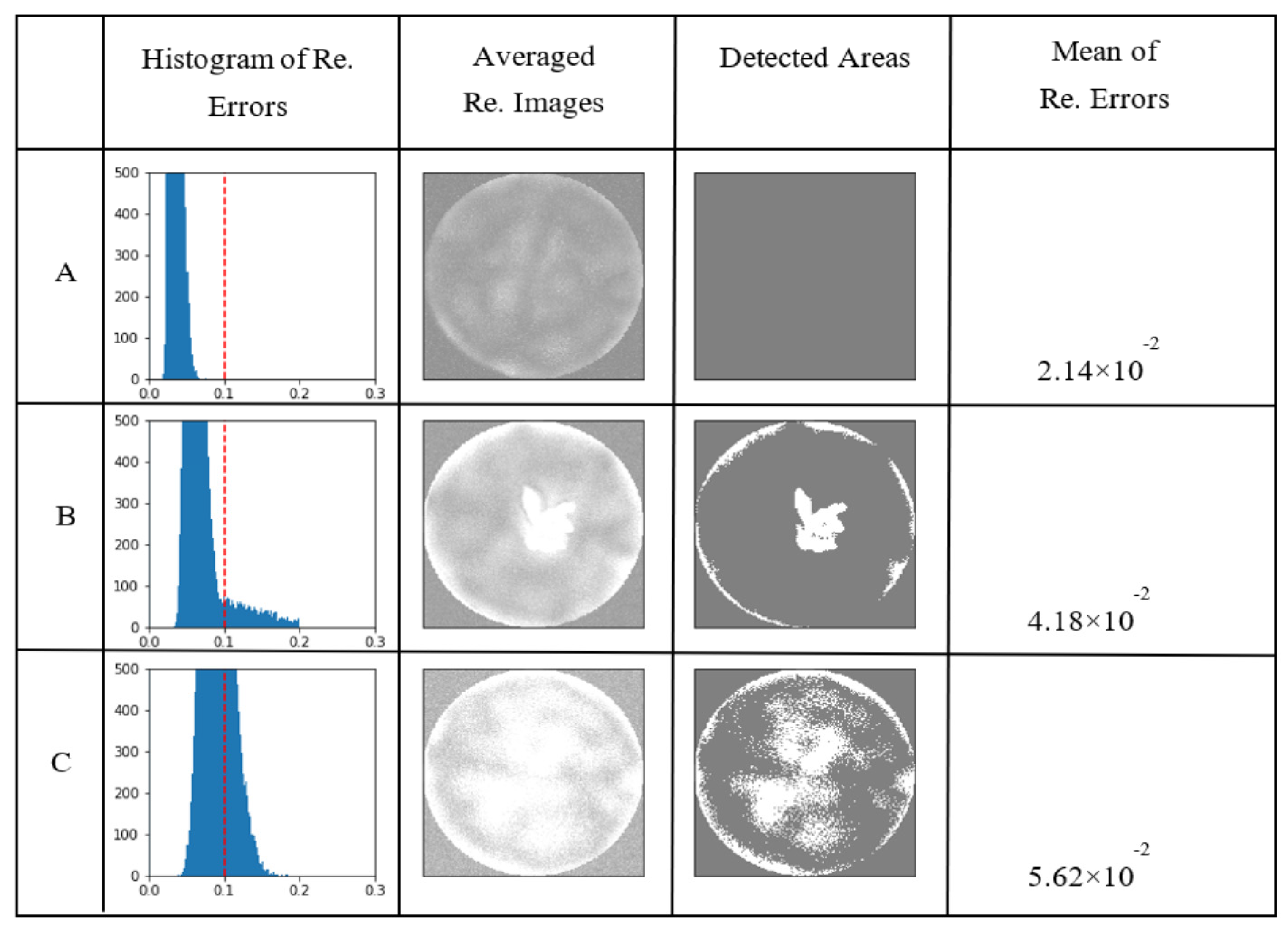
The experiments in this paper demonstrated that the proposed method detected the damaged area correctly and precisely for the verification specimens (b) and (c) from the viewpoint of macroscopic-level evaluation, which is the purpose of the NDE using vibration mode (see
Section 2). Since the scale of the microscopic-level damage is beyond the expected scale that the proposed NDE method is supposed to cover, it is consistent with the experimental results that our method does not detect any area in specimen (c), which has only small cracks (see the discussion in
Section 4.2). The main contribution is that, despite the fact that we use only a single specimen for training, we succeed in detecting the damaged area fairly accurately using methods of deep learning, which generally require us to prepare a large amount of data. On the other hand, the fact that there are only two verification specimens is a point to be further examined in the future.
Micro-level defects such as cracks/damage/pores, which are difficult to observe visually, may affect the physical properties of the material after being accumulated. If some outliers occur in the physical properties of the specimen, such as stiffness, the anomaly area may be detected as a damaged area with our method. It is necessary to examine in the future what kind of micro-level defects and to what extent they accumulate to cause significant changes in the physical properties.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}