
Dynamic Properties and Vibration Control of Additively Manufactured Carbon and Glass Fiber Reinforced Polymer Composites Using MFC: A Numerical Study with Experimental Validation

 , , , and
, , , and
Abstract
1. Introduction
2. Materials and Methods
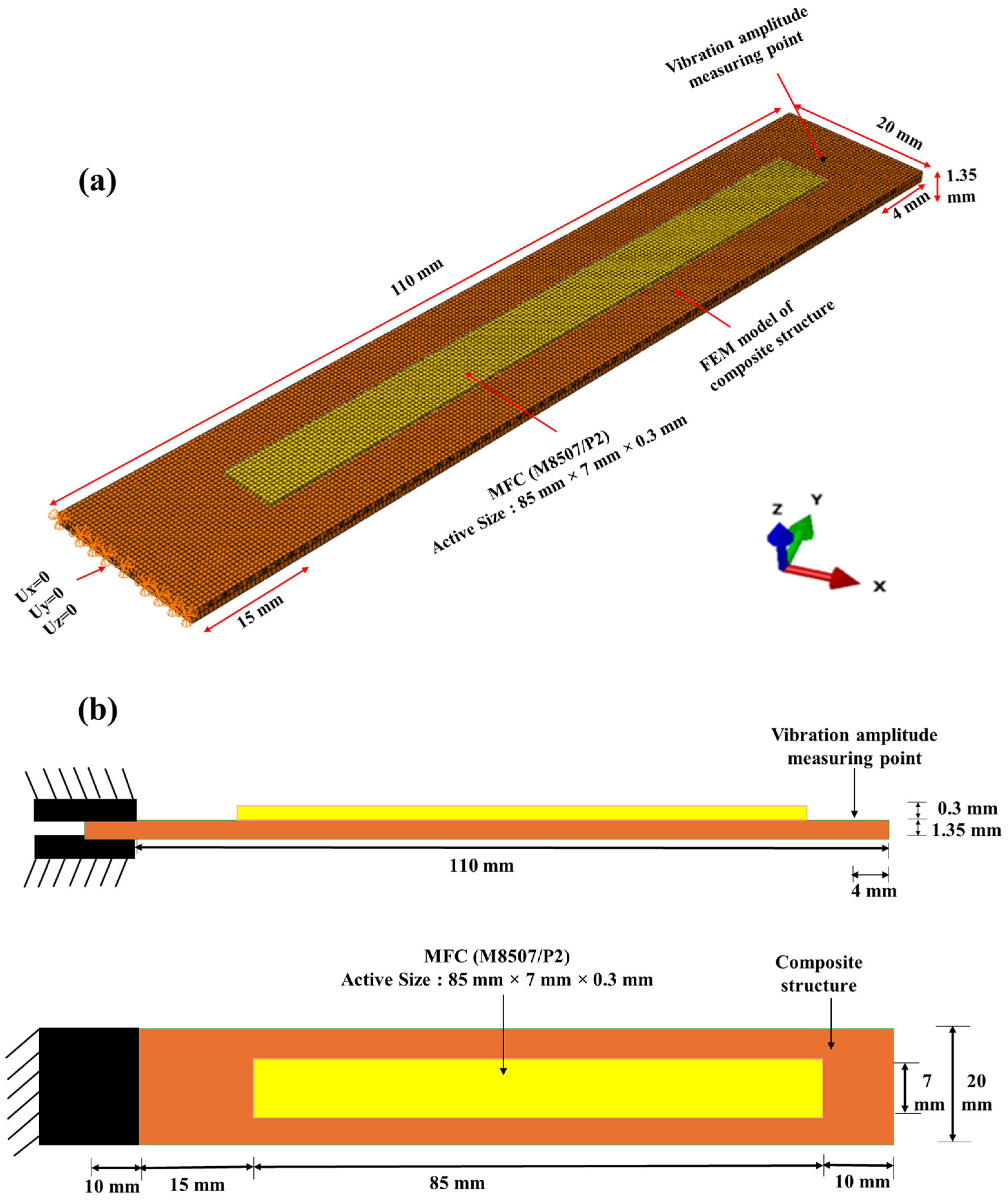
2.1. Finite Element Modeling (FEM) of Composite Structures
2.2. Extraction of Modal Frequencies and Mode Shapes
2.3. Amplitude Frequency Response (AFR)
2.4. Vibration Control Analysis
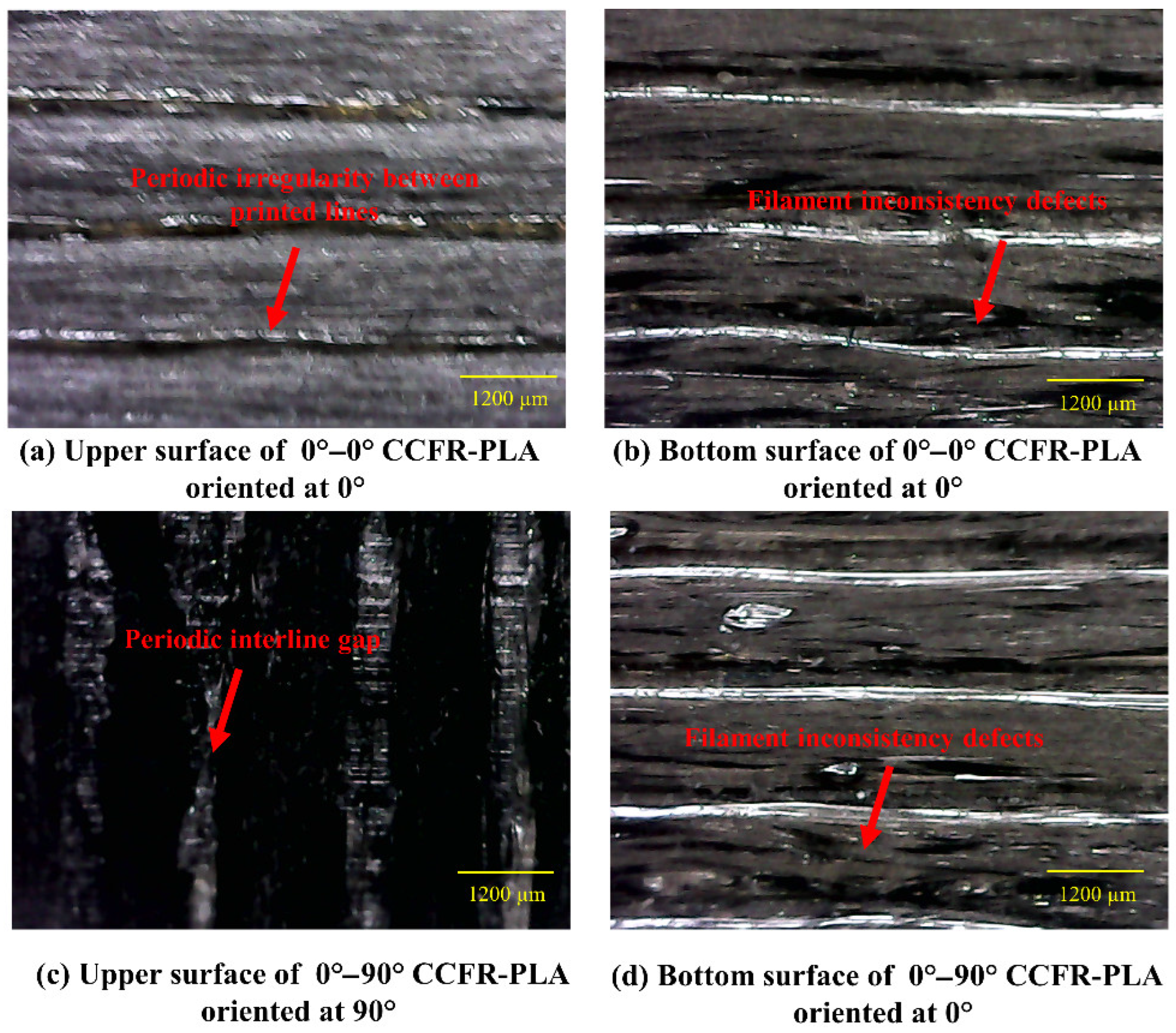
2.5. Microstructural Imaging of Composite Structures
3. Results and Discussions
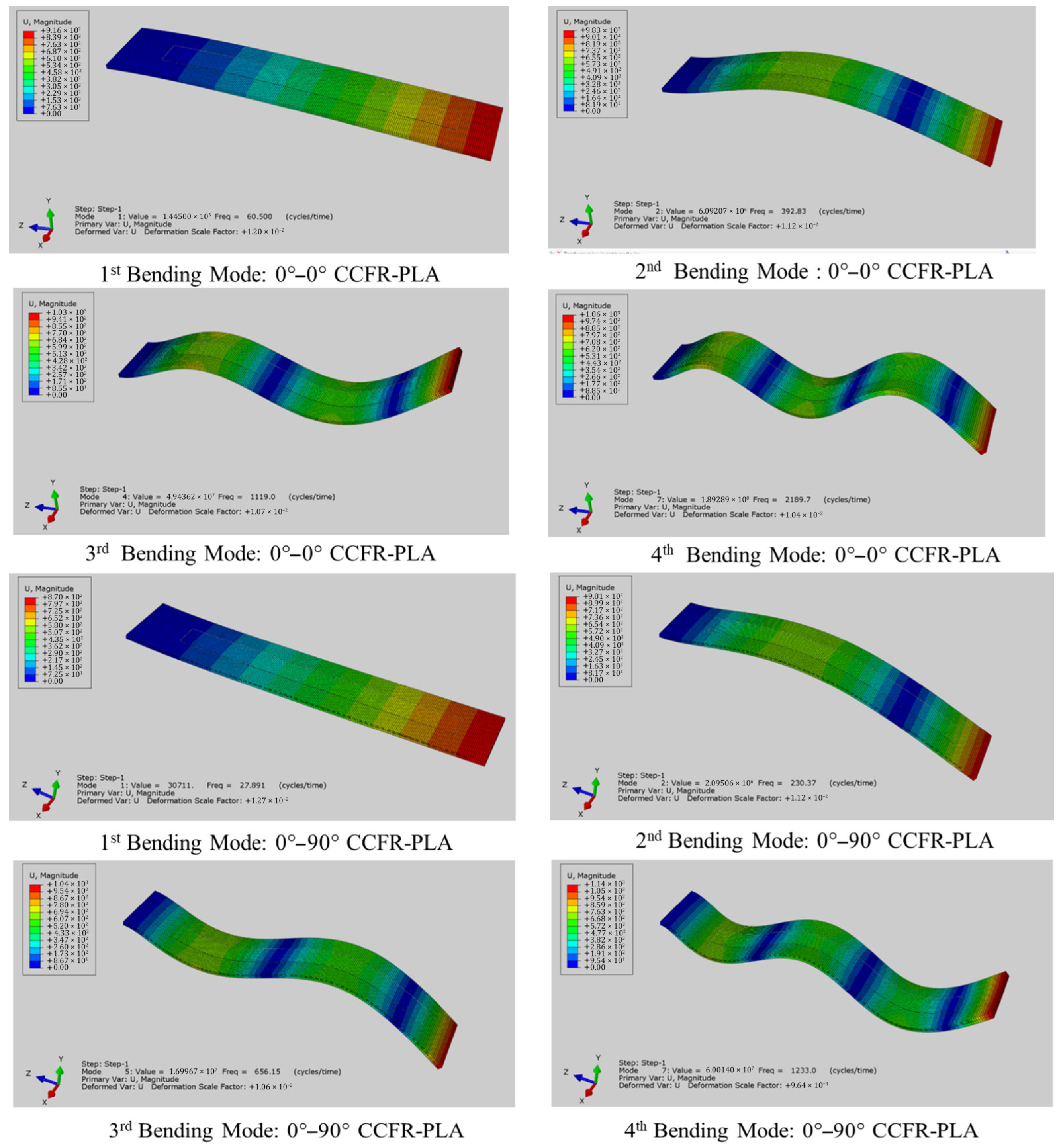
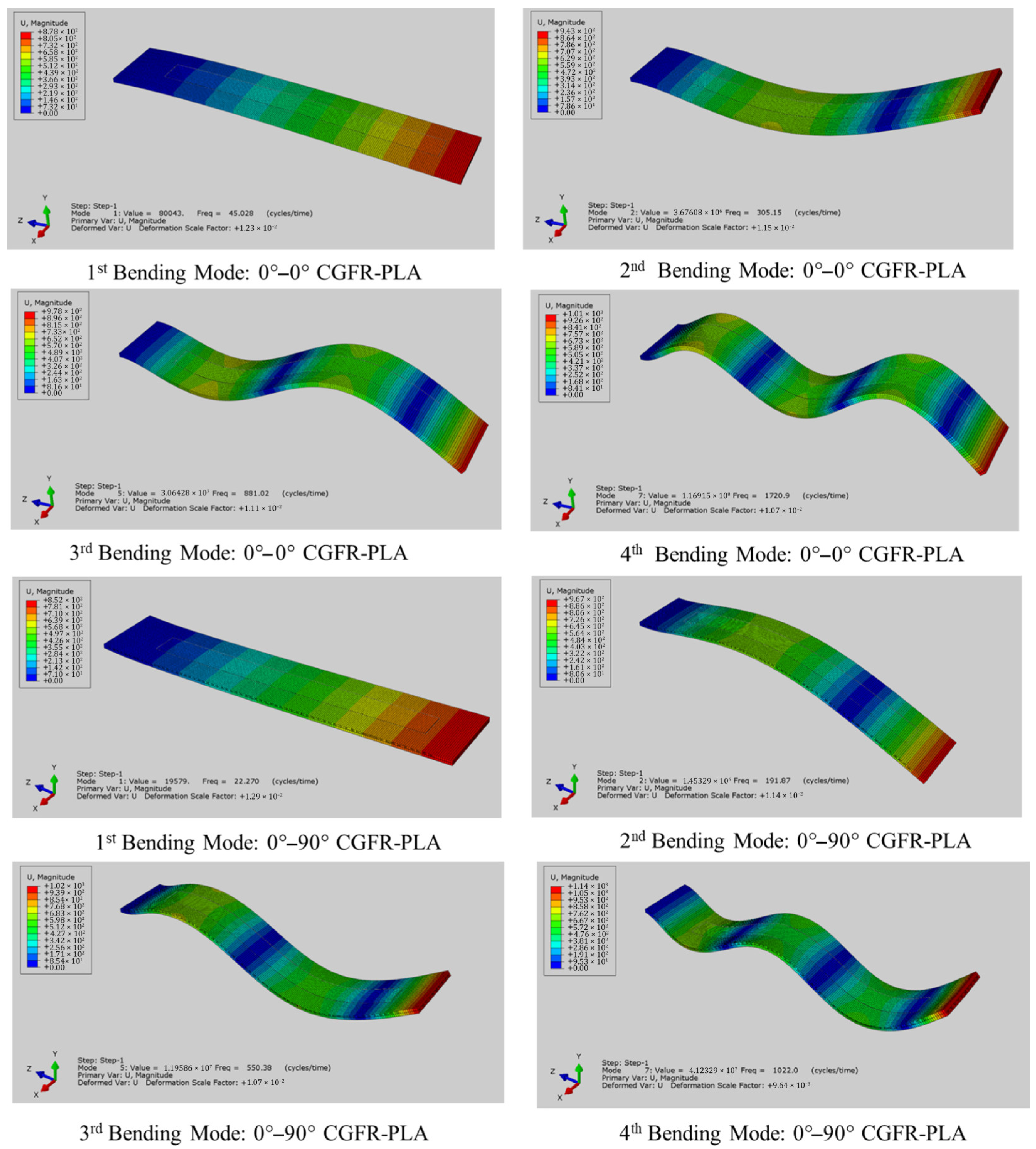
3.1. Assessment of Modal Frequencies and Mode Shapes
3.2. Assessment of Amplitude Frequency Response (AFR)
3.3. Vibration Amplitude Control Analysis
4. Conclusions
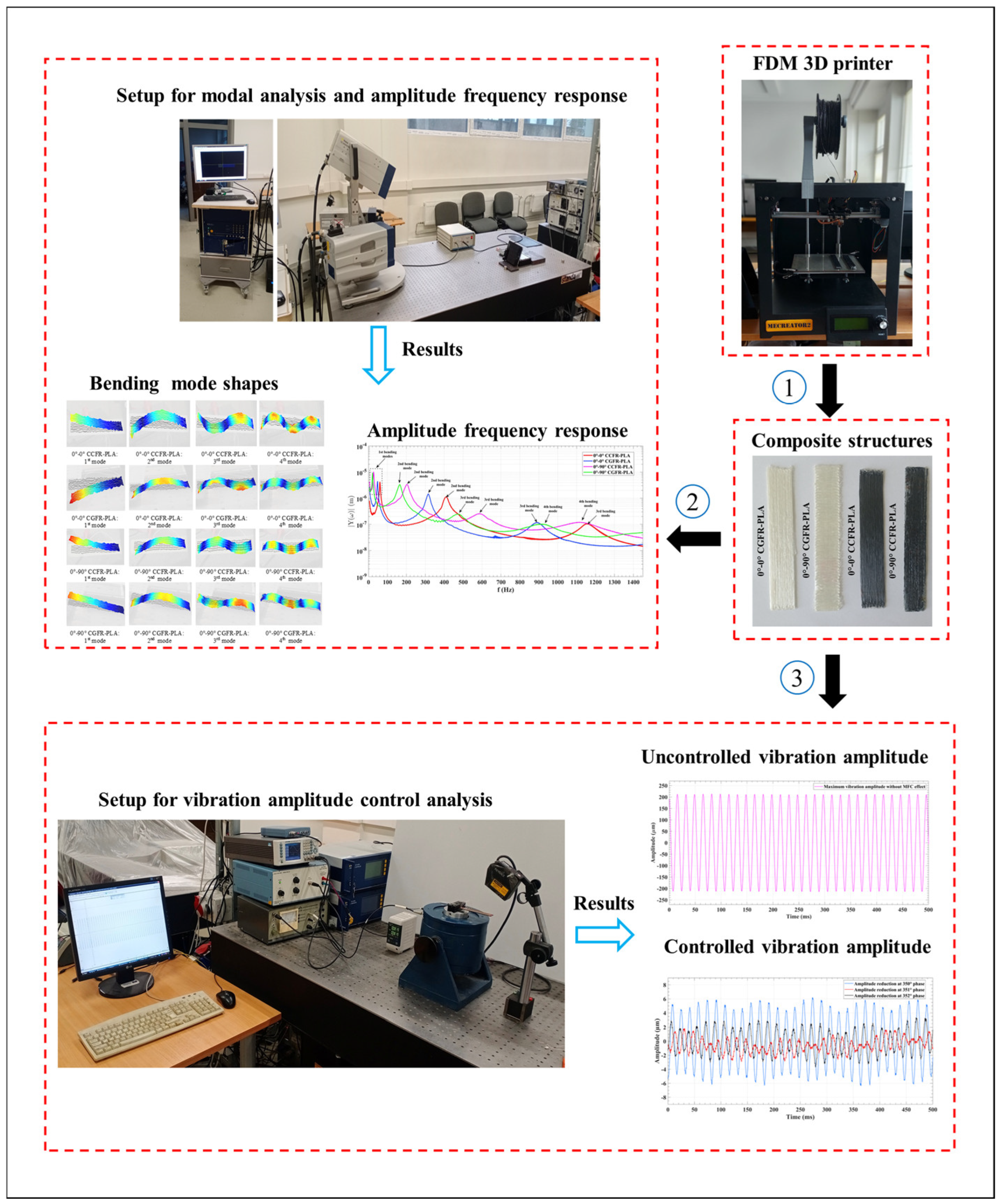
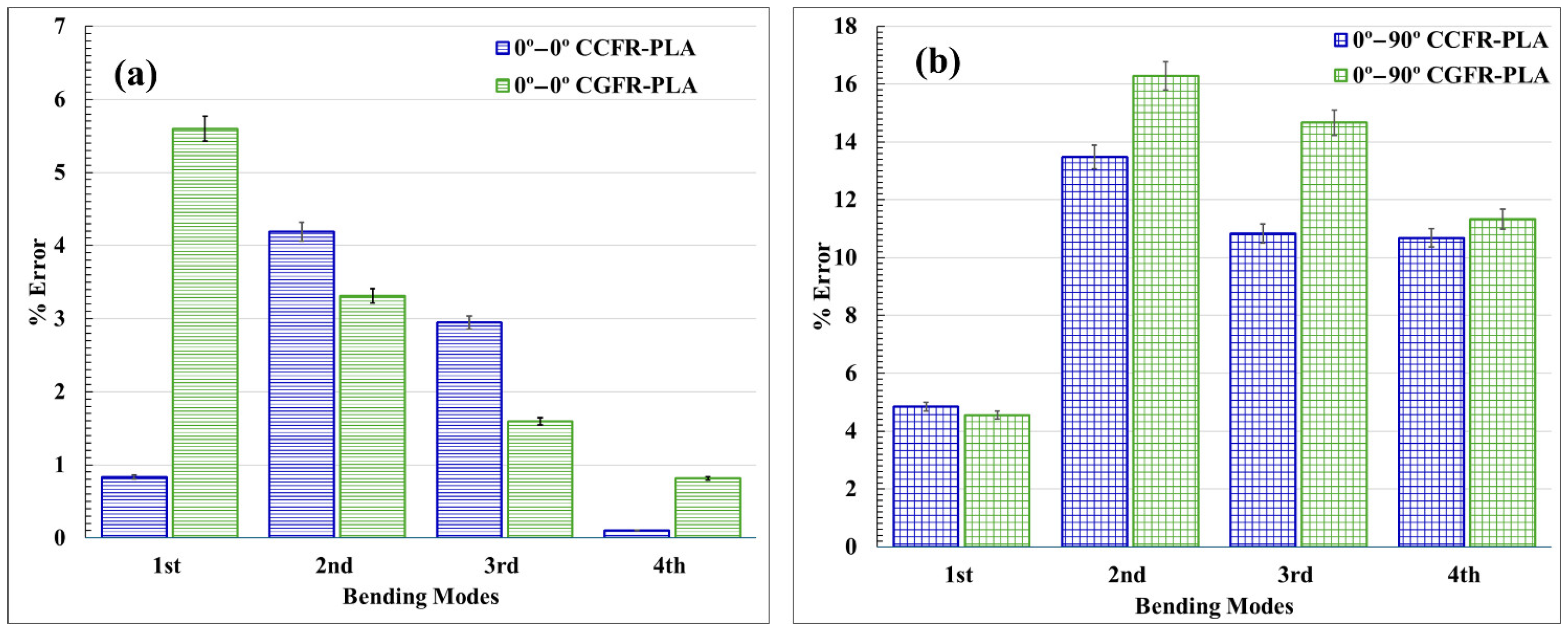
- The numerical bending mode frequencies of 0°–0° models were higher than corresponding 0°–90° oriented models. This is because the 0°–0° models demonstrate higher stiffness due to fibers being aligned in the same direction, while in the 0°–90° the fibers are perpendicular. The first bending modes frequencies were determined to be 60.5 Hz for 0°–0° CCFR-PLA, 27.89 Hz for 0°–90° CCFR-PLA, 45.03 Hz for 0°–0° CGFR-PLA, and 22.27 Hz for 0°–90° CGFR-PLA. The corresponding experimental values were 60 Hz, 26.60 Hz, 47.70 Hz, and 21.30 Hz, respectively. In the 0°–0° numerical models, the first and higher bending mode (2nd, 3rd, and 4th) frequencies deviated by a maximum of about 6% from experimental values. For 0°–90° numerical models, the first mode frequencies deviated by a maximum of about 5%, and the higher modes by a maximum of about 16%.
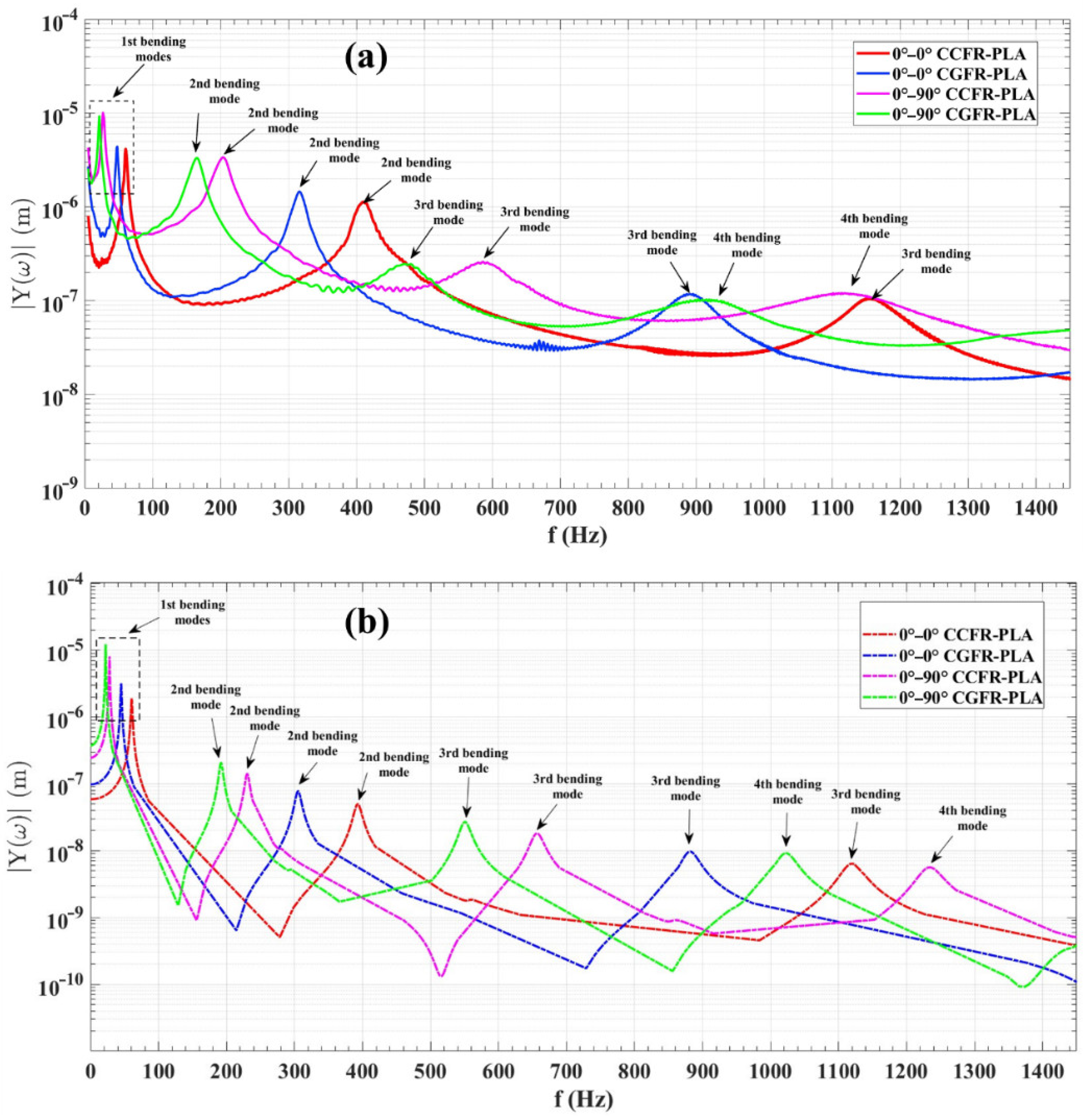
- The AFR indicates that both experimental and numerical results exhibit variation in the absolute values of vibration amplitude as a function of frequency. However, the responses demonstrate a uniform consistency; the first bending mode presents the highest vibration amplitude, while the fourth bending mode the lowest.
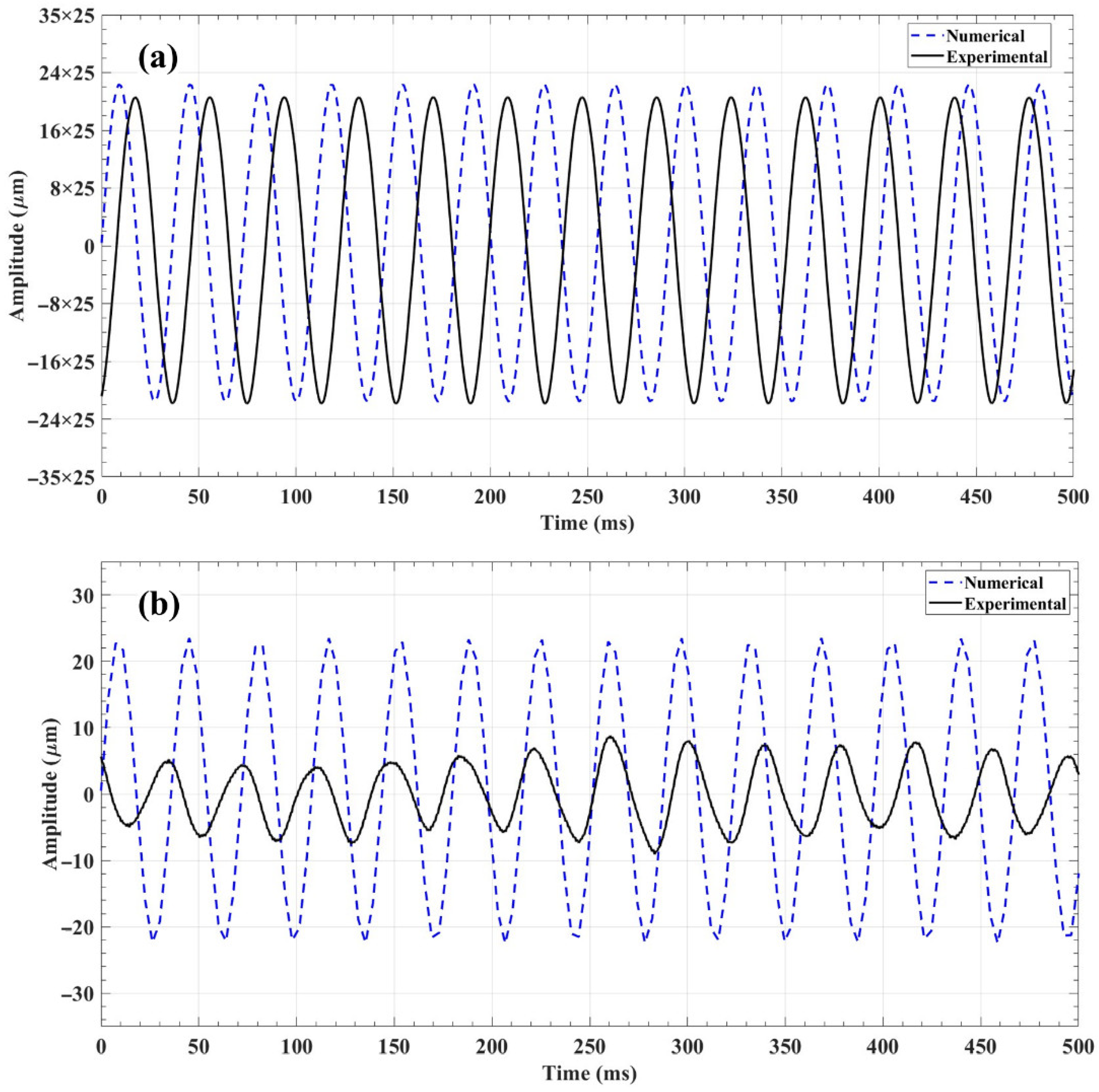
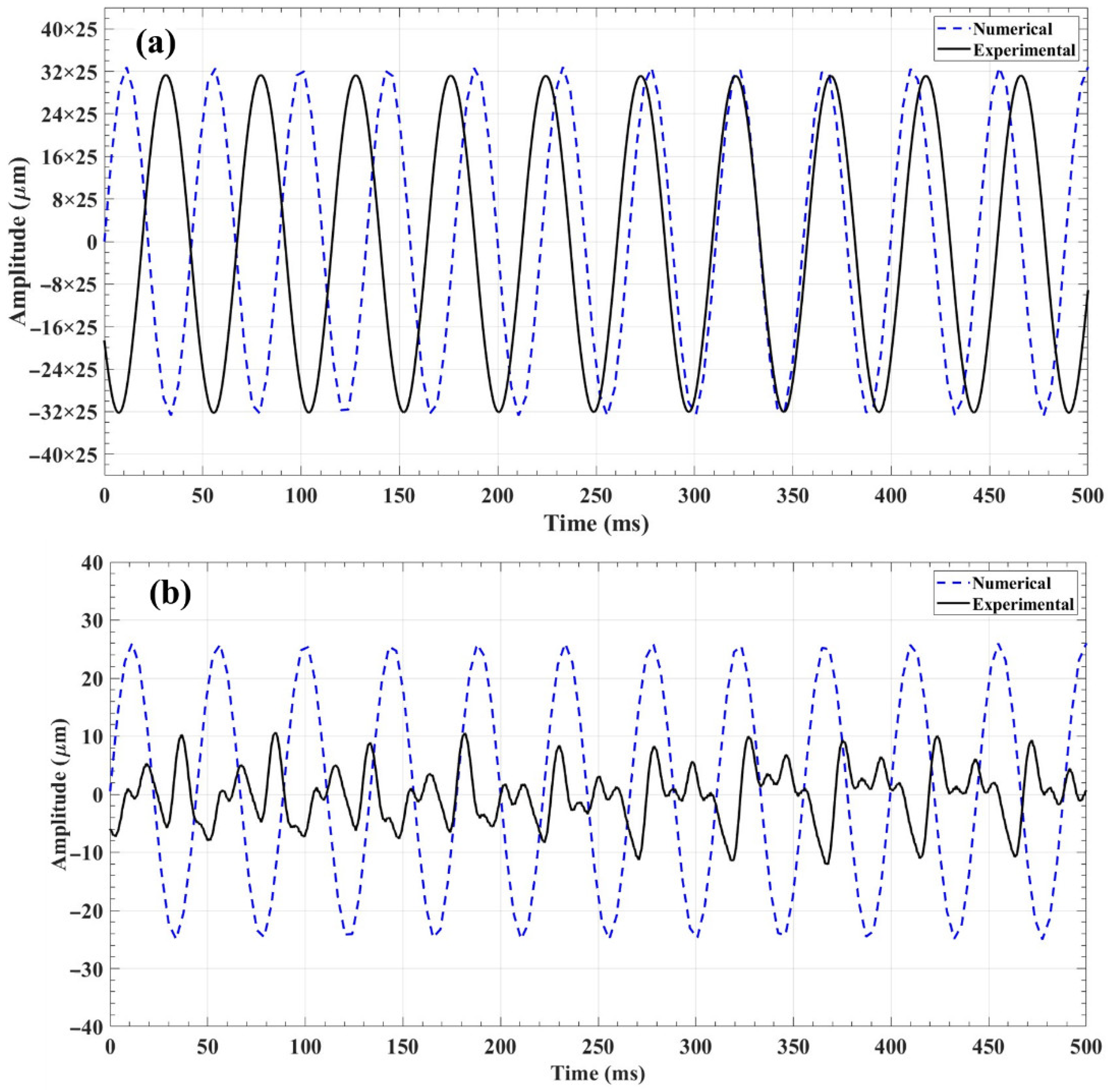
- The uncontrolled peak-to-peak vibration amplitude responses indicate that 0°–0° oriented models exhibit lower amplitudes than 0°–90° models under external forces at the relevant first resonant frequency. This demonstrates the comparatively higher stiffness and resistance to deformation of the 0°–0° models. In the numerical models, uncontrolled peak-to-peak amplitudes were about ±222 µm for 0°–0° CCFR-PLA, ±252 µm for 0°–0° CGFR-PLA, +555 µm to −540 µm for 0°–90° CCFR-PLA, and ±818 µm for 0°–90° CGFR-PLA. The corresponding experimental values were about ±210 µm, ±241 µm, +514 µm to −545 µm, and +785 µm to −810 µm, respectively.
- The peak-to peak numerically controlled vibration amplitude were achieved: about ±13 µm for 0°–0° CCFR-PLA, ±14.3 µm for 0°–0° CGFR-PLA, ±22.5 µm for 0°–90° CCFR-PLA, and ±25 µm for 0°–90° CGFR-PLA. The corresponding experimental value were about ±1.7 µm, +2.9 µm to −2.4 µm, +6.15 µm to −6.4 µm, and +8.5 µm to −12.2 µm, respectively. Although the vibration amplitude differences were significant, the observed percentage vibration reduction trends were consistent and meaningful, demonstrating a reduction of about 94% for all numerical models and about 99% experimental models.
- In the future, numerical study may include the improved modeling of MFC actuator heterogeneity to obtain the vibration control response closer to experiments. However, the suggested approaches in this study for examining dynamic properties and vibration control responses can be applied to different composite structures made of natural or synthetic fibers individually reinforced in diverse compatible matrix materials with distinct fiber orientations. This approach will help in the determination of an effective combination of fiber type, fiber orientation, and matrix material for dynamic and vibration-related applications.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Raza, A.; Mieloszyk, M.; Rimašauskienė, R.; Jūrėnas, V. Dynamic Analysis and Vibration Control of Additively Manufactured Thin-Walled Polylactic Acid Polymer (PLAP) and PLAP Composite Beam Structures: Numerical Investigation and Experimental Validation. Materials 2024, 17, 5478. [Google Scholar] [CrossRef] [PubMed]
- Hong, S.W.; Ahn, S.S.; Li, H.; Kim, J.K.; Ko, S.J.; Koo, J.M.; Seok, C.S. Charpy Impact Fracture Characteristics of CFRP Composite Materials According to Variations of Fiber Array Direction and Temperature. Int. J. Precis. Eng. Manuf. 2013, 14, 253–258. [Google Scholar] [CrossRef]
- He, D.; Liu, X.; Jiao, F. Investigation on Flame-Retardant, Thermal and Mechanical Properties of Glass Fiber Reinforced Polyimide Composites. Polym. Compos. 2024, 45, 350–359. [Google Scholar] [CrossRef]
- Sultan, M.T.H.; Rajesh, M.; Jayakrishna, K. Failure of Fibre-Reinforced Polymer Composites; CRC Press: Boca Raton, FL, USA, 2021. [Google Scholar]
- Jawaid, M.; Thariq Hameed Sultan, M.; Saba, N. Modelling of Damage Processes in Biocomposites, Fibre-Reinforced Composites and Hybrid Composites, 1st ed.; Elsevier: Amsterdam, The Netherlands, 2018; ISBN 9780081022894. [Google Scholar]
- Diniță, A.; Ripeanu, R.G.; Ilincă, C.N.; Cursaru, D.; Matei, D.; Naim, R.I.; Tănase, M.; Portoacă, A.I. Advancements in Fiber-Reinforced Polymer Composites: A Comprehensive Analysis. Polymers 2023, 16, 2. [Google Scholar] [CrossRef] [PubMed]
- Chung, D.D.L. Processing-Structure-Property Relationships of Continuous Carbon Fiber Polymer-Matrix Composites. Mater. Sci. Eng. R Rep. 2017, 113, 1–29. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, L.; Yang, G.; Yao, Y.; Wei, X.; Pan, T.; Wu, J.; Tian, M.; Yin, P. Recent Advances in Recyclable Thermosets and Thermoset Composites Based on Covalent Adaptable Networks. J. Mater. Sci. Technol. 2021, 92, 75–87. [Google Scholar] [CrossRef]
- Prashar, G.; Vasudev, H.; Bhuddhi, D. Additive Manufacturing: Expanding 3D Printing Horizon in Industry 4.0. Int. J. Interact. Des. Manuf. 2023, 17, 2221–2235. [Google Scholar] [CrossRef]
- Ozyilmaz, E.D.; Turan, A.; Comoglu, T. An Overview on the Advantages and Limitations of 3D Printing of Microneedles. Pharm. Dev. Technol. 2021, 26, 923–933. [Google Scholar] [CrossRef]
- Cano-Vicent, A.; Tambuwala, M.M.; Hassan, S.S.; Barh, D.; Aljabali, A.A.A.; Birkett, M.; Arjunan, A.; Serrano-Aroca, Á. Fused Deposition Modelling: Current Status, Methodology, Applications and Future Prospects. Addit. Manuf. 2021, 47, 102378. [Google Scholar] [CrossRef]
- Lalegani Dezaki, M.; Mohd Ariffin, M.K.A.; Hatami, S. An Overview of Fused Deposition Modelling (FDM): Research, Development and Process Optimisation. Rapid Prototyp. J. 2021, 27, 562–582. [Google Scholar] [CrossRef]
- Taib, N.A.A.B.; Rahman, M.R.; Huda, D.; Kuok, K.K.; Hamdan, S.; Bakri, M.K.B.; Julaihi, M.R.M.B.; Khan, A. A Review on Poly Lactic Acid (PLA) as a Biodegradable Polymer. Polym. Bull. 2023, 80, 1179–1213. [Google Scholar] [CrossRef]
- Karimi, A.; Rahmatabadi, D.; Baghani, M. Various FDM Mechanisms Used in the Fabrication of Continuous-Fiber Reinforced Composites: A Review. Polymers 2024, 16, 831. [Google Scholar] [CrossRef]
- Doddamani, M. Dynamic Mechanical Analysis of 3D Printed Eco-Friendly Lightweight Composite. Compos. Commun. 2020, 19, 177–181. [Google Scholar] [CrossRef]
- Chaupal, P.; Rajendran, P. A Review on Recent Developments in Vibration-Based Damage Identification Methods for Laminated Composite Structures: 2010–2022. Compos. Struct. 2023, 311, 116809. [Google Scholar] [CrossRef]
- Treviso, A.; Van Genechten, B.; Mundo, D.; Tournour, M. Damping in Composite Materials: Properties and Models. Compos. B Eng. 2015, 78, 144–152. [Google Scholar] [CrossRef]
- Nurhaniza, M.; Ariffin, M.K.A.; Ali, A.; Mustapha, F.; Noraini, A.W. Finite Element Analysis of Composites Materials for Aerospace Applications. IOP Conf. Ser. Mater. Sci. Eng. 2010, 11, 012010. [Google Scholar] [CrossRef]
- Fan, W.; Dong, J.; Wei, B.; Zhi, C.; Yu, L.; Xue, L.; Dang, W.; Li, L. Fast and Accurate Bending Modulus Prediction of 3D Woven Composites via Experimental Modal Analysis. Polym. Test 2019, 78, 105938. [Google Scholar] [CrossRef]
- Balaji, P.S.; Karthik SelvaKumar, K. Applications of Nonlinearity in Passive Vibration Control: A Review. J. Vib. Eng. Technol. 2020, 9, 183–213. [Google Scholar] [CrossRef]
- Ma, R.; Bi, K.; Hao, H. Inerter-Based Structural Vibration Control: A State-of-the-Art Review. Eng. Struct. 2021, 243, 112655. [Google Scholar] [CrossRef]
- Zhang, Y.; Sun, W.; Zhang, H.; Ma, H.; Du, D.; Xu, K. Design and Implementation of the Adaptive Vibration Control for Bolted Composite Plates under Variable Loads. Mech. Syst. Signal Process. 2025, 229, 112496. [Google Scholar] [CrossRef]
- Smart Material Manufactures and Develops High-Performance Piezo Composites. Available online: https://www.smart-material.com/ (accessed on 6 March 2022).
- Pandey, A.; Arockiarajan, A. Actuation Performance of Macro-Fiber Composite (MFC): Modeling and Experimental Studies. Sens. Actuators A Phys. 2016, 248, 114–129. [Google Scholar] [CrossRef]
- Zhang, S.Q.; Li, Y.X.; Schmidt, R. Modeling and Simulation of Macro-Fiber Composite Layered Smart Structures. Compos. Struct. 2015, 126, 89–100. [Google Scholar] [CrossRef]
- Raza, A.; MAHATO, S.; Rimašauskienė, R. Actuation Performance of Macro Fibre Composite (MFC) as Actuator in Vibration Reduction of Cantilever Beams. Mechanics 2023, 29, 42–50. [Google Scholar] [CrossRef]
- Lyu, Z.; Li, C.; Jia, T. Combined Vibration Control of Flexible Cantilever Beam Driven by MFC Actuators and Rotary Motor. Acta Mech. 2024, 236, 305–320. [Google Scholar] [CrossRef]
- Raza, A.; Rimašauskienė, R.; Jūrėnas, V.; Mahato, S. Experimental Investigation of Vibration Amplitude Control in Additive Manufactured PLA and PLA Composite Structures with MFC Actuator. Eng. Struct. 2023, 294, 116802. [Google Scholar] [CrossRef]
- Zhang, P.; Wang, J. Macro Fiber Composite-Based Active Control of Nonlinear Forced Vibration of Functionally Graded Plate. Appl. Math. Mech. 2025, 46, 869–884. [Google Scholar] [CrossRef]
- Raza, A.; Rimašauskienė, R.; Jūrėnas, V.; Kuncius, T. Enhancing Vibration Control in Kinematically Excited Additively Manufactured Continuous Fiber Composite Structures with Distinct Orientations. Eng. Struct. 2024, 321, 118933. [Google Scholar] [CrossRef]
- Polymaker PolyLiteTM PLA Technical Data Sheet. Available online: https://ec3d.co.za/wp-content/uploads/2022/08/PolyLite%E2%84%A2-PLA_TDS_V3.pdf?srsltid=AfmBOopruFk5-qatnuWiZR6Q2I8dFuh4pnvGAUf08AiIStX_vD0KKD5a (accessed on 9 March 2023).
- Toray Composite Materials America T300 Standard Modulus Carbon Fiber Technical Data Sheet. Available online: https://www.rockwestcomposites.com/media/wysiwyg/T300DataSheet_1.pdf (accessed on 9 March 2023).
- E & S Fiberglass Composite Materials|JPS Composite. Available online: https://jpscm.com/products/e-glass-s-glass/ (accessed on 5 February 2025).
- Abaqus CAE. Available online: https://docs.software.vt.edu/abaqusv2024/English/ (accessed on 23 June 2024).
- Raza, A.; Rimašauskienė, R.; Jūrėnas, V.; Rimašauskas, M. An Experimental Study on the Dynamic Properties of 3D-Printed Structures with Different Layer Orientations. J. Vib. Eng. Technol. 2024, 12, 321–334. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specifications | PLA | CGF | CCF |
|---|---|---|---|
| Young’s Modulus (Y), GPa | 2.636 ± 0.330 | 89 | 230 |
| Poisson’s Ratio (v) | 0.36 | 0.22 | 0.20 |
| Tensile Strength (σt), MPa | 46.6 ± 0.9 | 4600 | 3530 |
| Density (ρ), g/cm3 | 1.17–1.24 | 2.53 | 1.76 |
| Specifications | MFC (M8507/P2) |
|---|---|
| Young’s Modulus (Y), GPa | Y1 = 30.336, Y2 = Y3 = 15.857 |
| Shear Modulus (S), GPa | S12 = S13 = S23 = 5.515 |
| Poisson’s Ratio (v) | v12 = v13 = 0.31, v23 = 0.438 |
| Density (ρ), g/cm3 | 5.44 |
| Piezoelectric Coefficient (d), pm/V | d31 = −170, d32 = −100 |
| Bending Modes | 0°–0° CCFR-PLA | 0°–90° CCFR-PLA | 0°–0° CGFR-PLA | 0°–90° CGFR-PLA | ||||
|---|---|---|---|---|---|---|---|---|
| Experiment | Numerical | Experiment | Numerical | Experiment | Numerical | Experiment | Numerical | |
| Hz | ||||||||
| 1st | 60.00 | 60.5 | 26.60 | 27.89 | 47.70 | 45.03 | 21.30 | 22.27 |
| 2nd | 410.00 | 392.83 | 203.00 | 230.37 | 315.60 | 305.15 | 165.00 | 191.87 |
| 3rd | 1153.00 | 1119.00 | 592.00 | 656.15 | 895.30 | 881.02 | 480.00 | 550.38 |
| 4th | 2192.00 | 2189.70 | 1114.00 | 1233.00 | 1707.00 | 1720.90 | 918.00 | 1022.00 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Raza, A.; Mieloszyk, M.; Rimašauskienė, R.; Jūrėnas, V.; Maqsood, N.; Rimašauskas, M.; Kuncius, T. Dynamic Properties and Vibration Control of Additively Manufactured Carbon and Glass Fiber Reinforced Polymer Composites Using MFC: A Numerical Study with Experimental Validation. J. Manuf. Mater. Process. 2025, 9, 235. https://doi.org/10.3390/jmmp9070235
Raza A, Mieloszyk M, Rimašauskienė R, Jūrėnas V, Maqsood N, Rimašauskas M, Kuncius T. Dynamic Properties and Vibration Control of Additively Manufactured Carbon and Glass Fiber Reinforced Polymer Composites Using MFC: A Numerical Study with Experimental Validation. Journal of Manufacturing and Materials Processing. 2025; 9(7):235. https://doi.org/10.3390/jmmp9070235
Chicago/Turabian StyleRaza, Ali, Magdalena Mieloszyk, Rūta Rimašauskienė, Vytautas Jūrėnas, Nabeel Maqsood, Marius Rimašauskas, and Tomas Kuncius. 2025. "Dynamic Properties and Vibration Control of Additively Manufactured Carbon and Glass Fiber Reinforced Polymer Composites Using MFC: A Numerical Study with Experimental Validation" Journal of Manufacturing and Materials Processing 9, no. 7: 235. https://doi.org/10.3390/jmmp9070235
APA StyleRaza, A., Mieloszyk, M., Rimašauskienė, R., Jūrėnas, V., Maqsood, N., Rimašauskas, M., & Kuncius, T. (2025). Dynamic Properties and Vibration Control of Additively Manufactured Carbon and Glass Fiber Reinforced Polymer Composites Using MFC: A Numerical Study with Experimental Validation. Journal of Manufacturing and Materials Processing, 9(7), 235. https://doi.org/10.3390/jmmp9070235