
A Critical Review on the Battery System Reliability of Drone Systems

Abstract
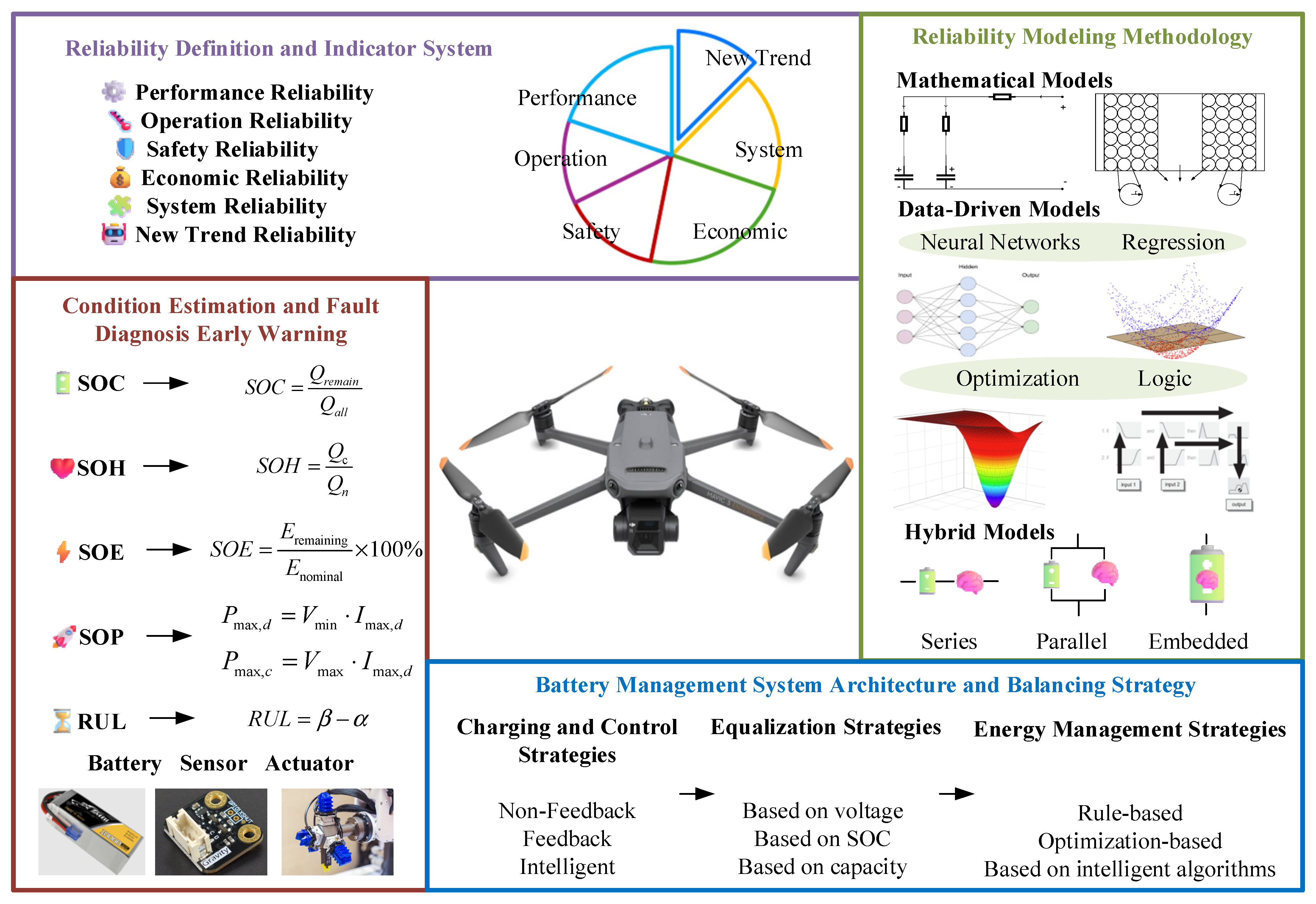
1. Introduction
- Fragmented reliability standards with varying definitions and the lack of a unified framework;
- Disjointed modeling approaches, with electrochemical, ECM, and data-driven models failing to achieve effective integration, which limits their generalization;
- Fault diagnosis being largely confined to single-fault scenarios, and struggling with complex features of concurrent faults like overcharge and thermal runaway as a result;
- Underdeveloped BMS research in edge computing, cybersecurity, and real-time balancing strategies that inadequately addresses highly dynamic flight demands.
- A comprehensive review of reliability modeling methods, including mathematical, data-driven, and hybrid models, and an analysis of their applicability and limitations under complex conditions;
- An in-depth exploration of state estimation techniques for five key battery parameters and fault diagnosis methods;
- A systematic analysis of UAV BMS architecture and active balancing strategies, with trends toward intelligent management being envisioned, which provides theoretical guidance and practical references for safe and efficient UAV battery operation.
2. Definition and Metrics of Unmanned Aerial Vehicle Battery Reliability
2.1. Definition of Drone Battery Reliability by International Organizations
- Performance reliability: The battery must achieve a cycle life of at least 500 charge–discharge cycles while maintaining the designed capacity, retaining ≥80% of its initial capacity after 500 cycles. Power output fluctuations should be constrained within ±5% under rated conditions, and the calendar life should exceed 5 years;
- Operational reliability: The battery must exhibit environmental adaptability, operating effectively within a temperature range from −20 °C to 50 °C and from 20% to 95% relative humidity (non-condensing). For its dynamic response, it should maintain ≥90% power output during load transitions from 2C to 5C discharge. Continuous operation is reflected by a single-flight availability of ≥95% and a mean time between failures (MTBF) of ≥5000 h;
- Safety reliability: The system must incorporate fault tolerance and ensure that single-cell failures do not compromise the system’s overall operation through an N + 1 redundancy design. For thermal runaway protection, a warning time of ≥5 min and a propagation suppression time of ≥15 min are required. Electromagnetic interference resistance must ensure no performance degradation under a 10 kV/m field strength;
- Economic reliability: The lifecycle cost per flight should be ≤0.05 USD/Wh, and the maintenance costs should not exceed 10% of the total costs. The recycling rate should reach ≥80%;
- System-level reliability: The battery system must comply with communication protocols such as ISO 21895 [27] to ensure interoperability. Mission support requires a power response time of ≤100 ms to meet rapid takeoff and landing demands. Module consistency means a voltage deviation of ≤50 mV and a temperature difference of ≤3 °C.

2.2. Indicators of UAV Battery Reliability
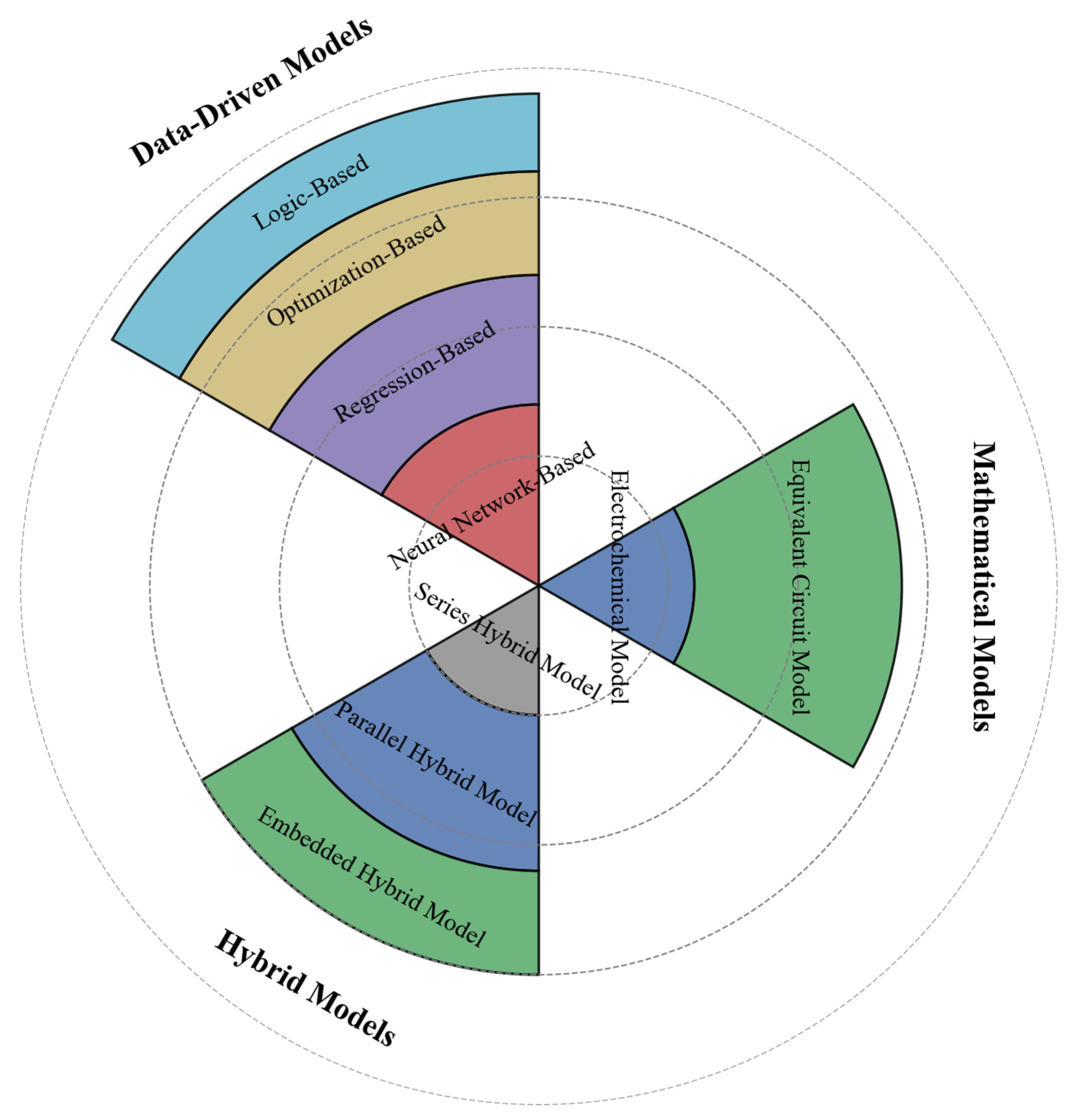
3. Reliability Modeling Methods for UAV Batteries
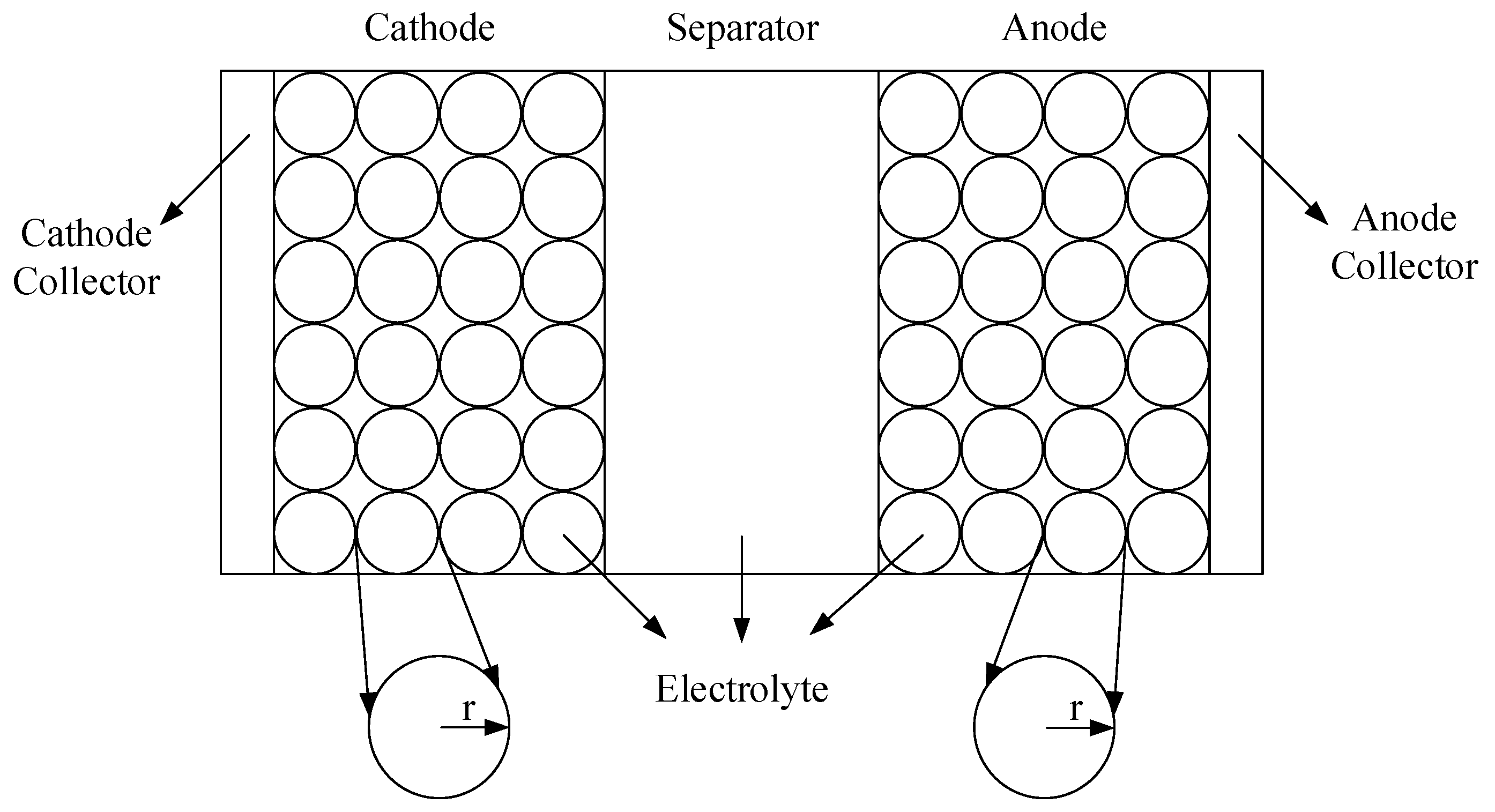
3.1. Mathematical Models
- Mathematical models, such as the Newman electrochemical model, equivalent circuit models, and thermal models, which are based on physical mechanisms and emphasize mechanistic interpretability;
- Data-driven models, which rely on extensive operational data (e.g., voltage, current, and temperature) collected during flight missions and are constructed using machine learning or statistical methods, which makes them suitable for complex, nonlinear scenarios;
- Hybrid models, which integrate the mechanistic foundation of mathematical models with the adaptability of data-driven models and thereby balance interpretability and predictive accuracy.
3.1.1. Electrochemical Models
- Pseudo-Two-Dimensional Model
- 2.
- SP Model
- 3.
- Extended SP Model
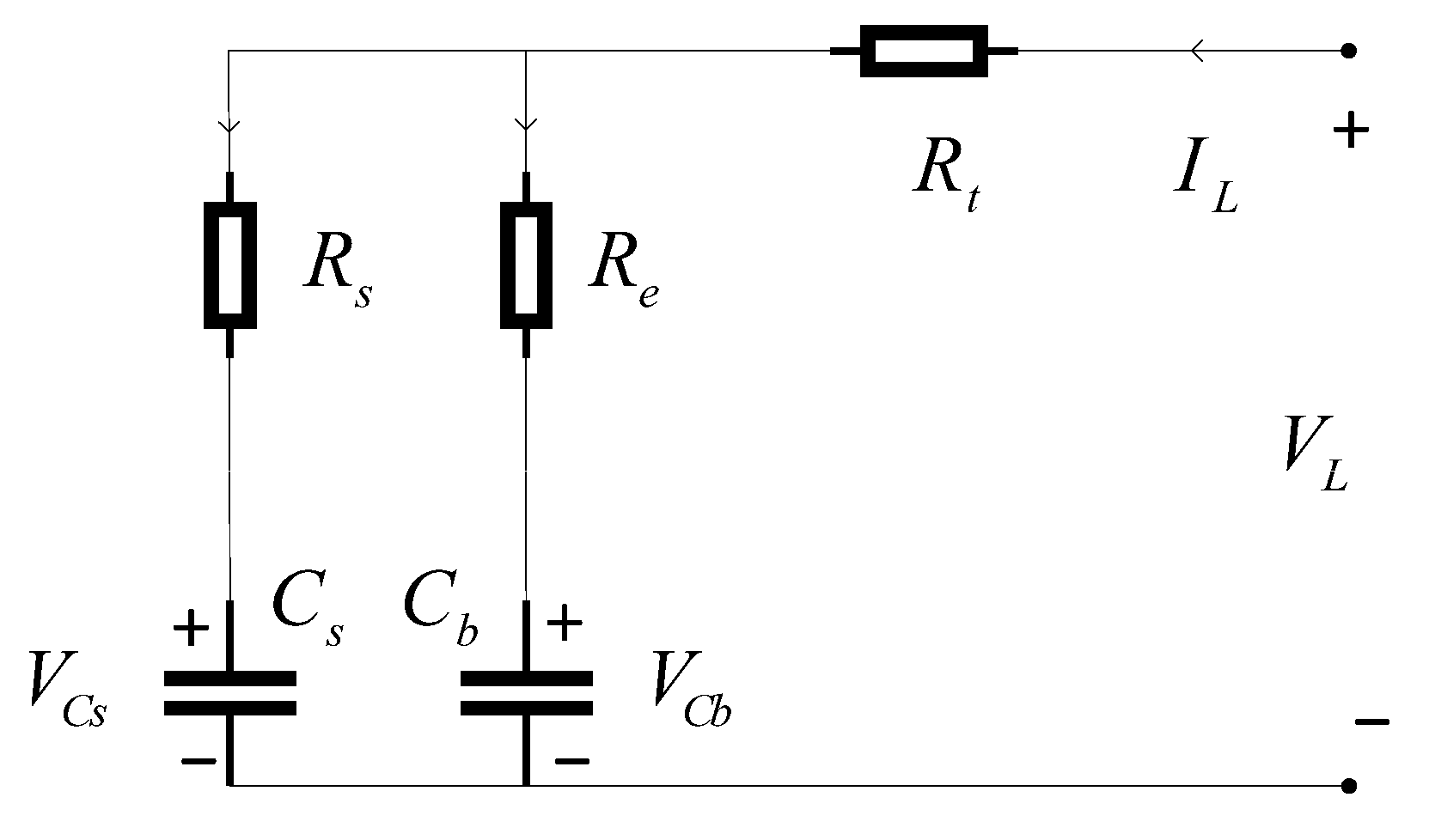
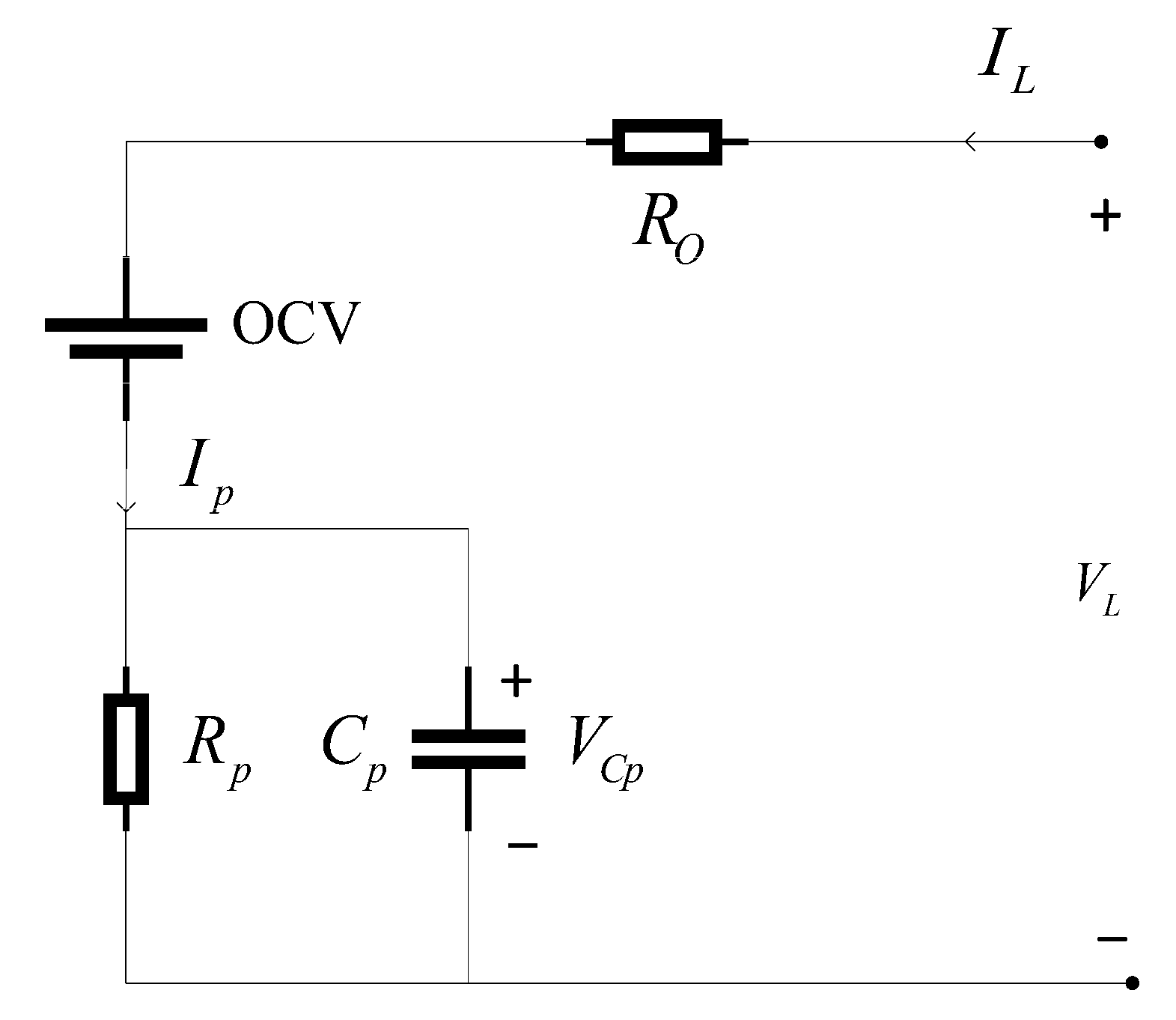
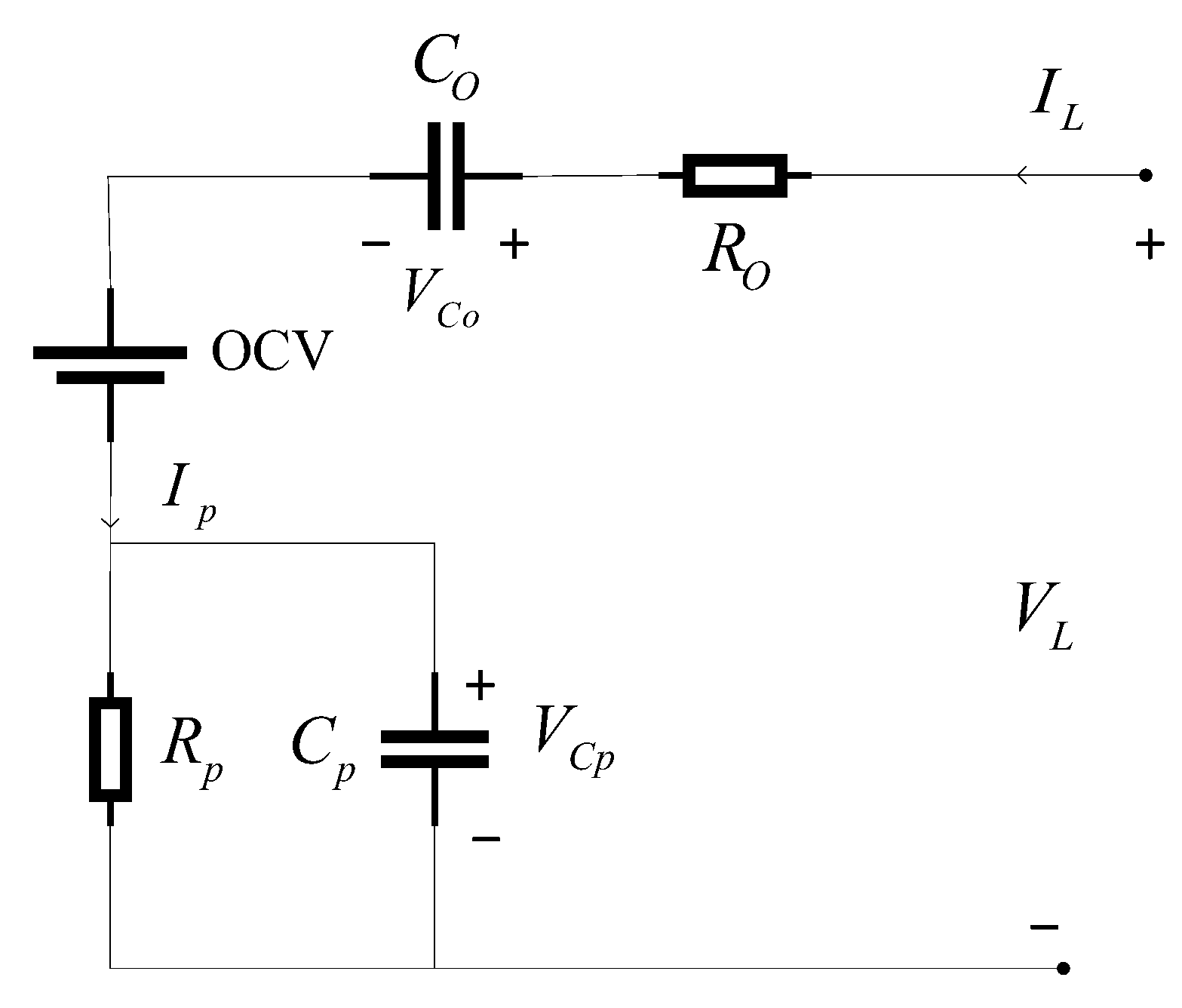
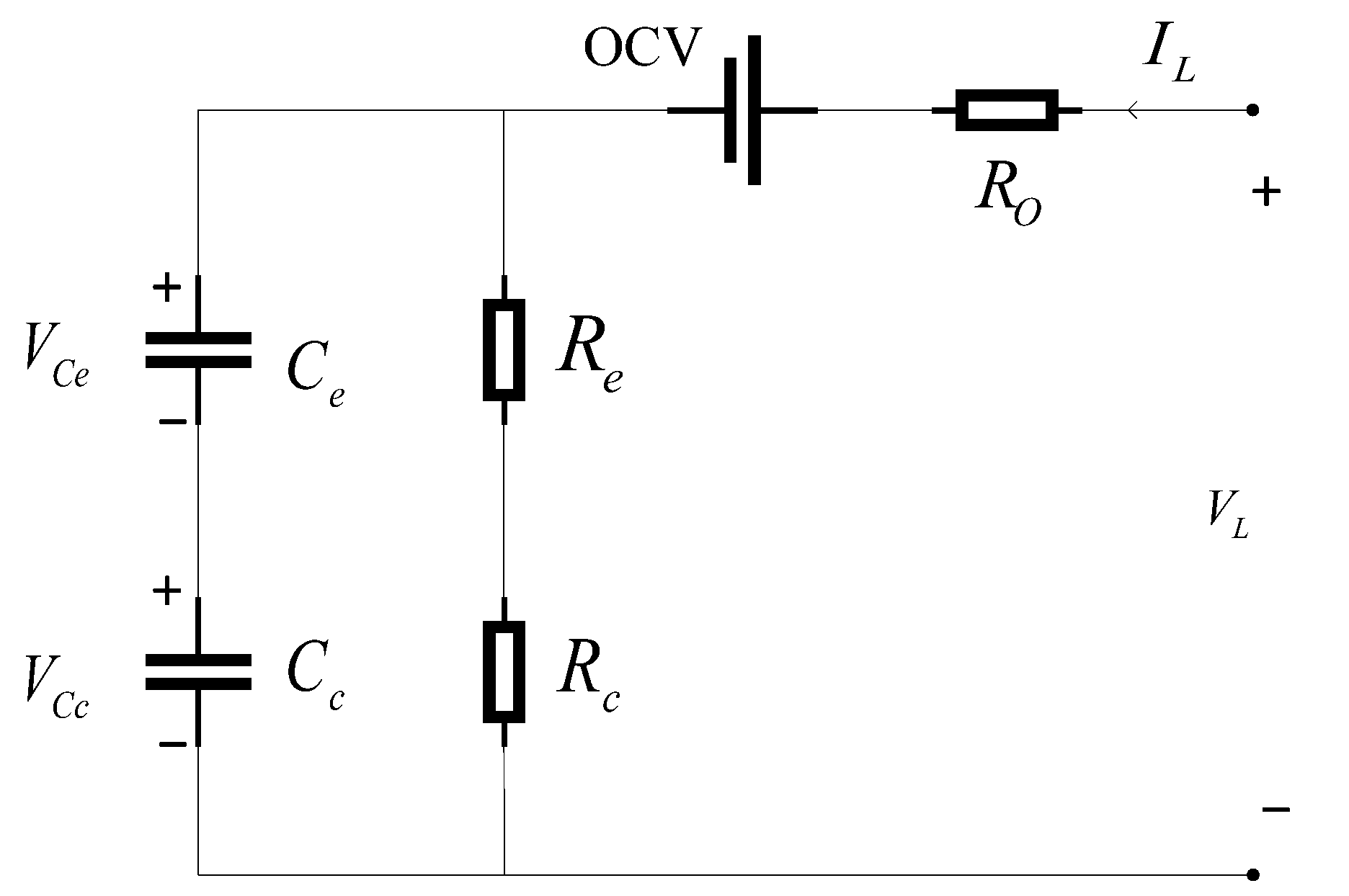
3.1.2. Equivalent Circuit Model
- RC Model
- 2.
- Thevenin Model
- 3.
- PNGV Model
- 4.
- Modified Thevenin Model
3.2. Data-Driven Models
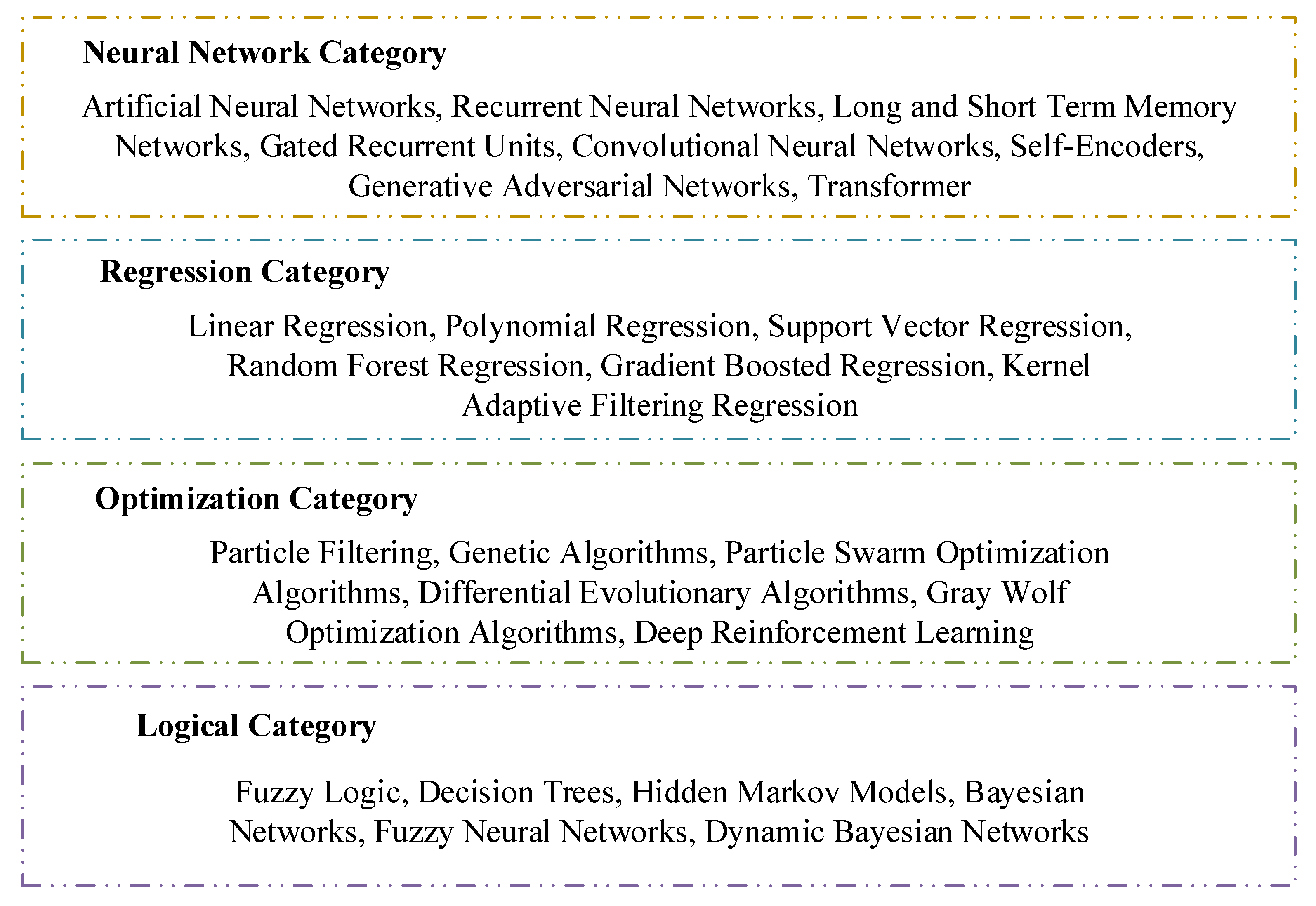
3.2.1. Neural Network-Based Models
3.2.2. Regression-Based Models
3.2.3. Optimization-Based Models
3.2.4. Logic-Based Models
3.3. Hybrid Models
3.3.1. Series Hybrid Modeling
3.3.2. Parallel Hybrid Modeling
3.3.3. Embedded Hybrid Modeling
4. UAV Battery State Estimation and Fault Diagnosis Early Warning
4.1. State Estimation of UAV Batteries
4.1.1. Introduction to State Parameters
4.1.2. State Estimation Methods
- Battery characteristic-based methods: these include table look-up methods, the open-circuit voltage method (OCV-SOC), and the ampere-hour integration method;
- Model-based methods: These include electrochemical models, equivalent circuit models, electrochemical impedance spectroscopy models, and fractional-order models;
- Data-driven methods: these include machine learning methods such as support vector machines, artificial neural networks, fuzzy logic, and deep learning methods such as genetic algorithms, particle swarm optimization, extended Kalman filter algorithms, and unscented Kalman filter algorithms;
- Hybrid methods: these include combinations of model-based and data-driven approaches, as well as data-driven and data-driven combinations, such as LSTM combined with extended Kalman filtering, equivalent circuit models combined with extreme learning machines, equivalent circuit models combined with Kalman filtering, and simplified electrochemical models combined with deep learning.

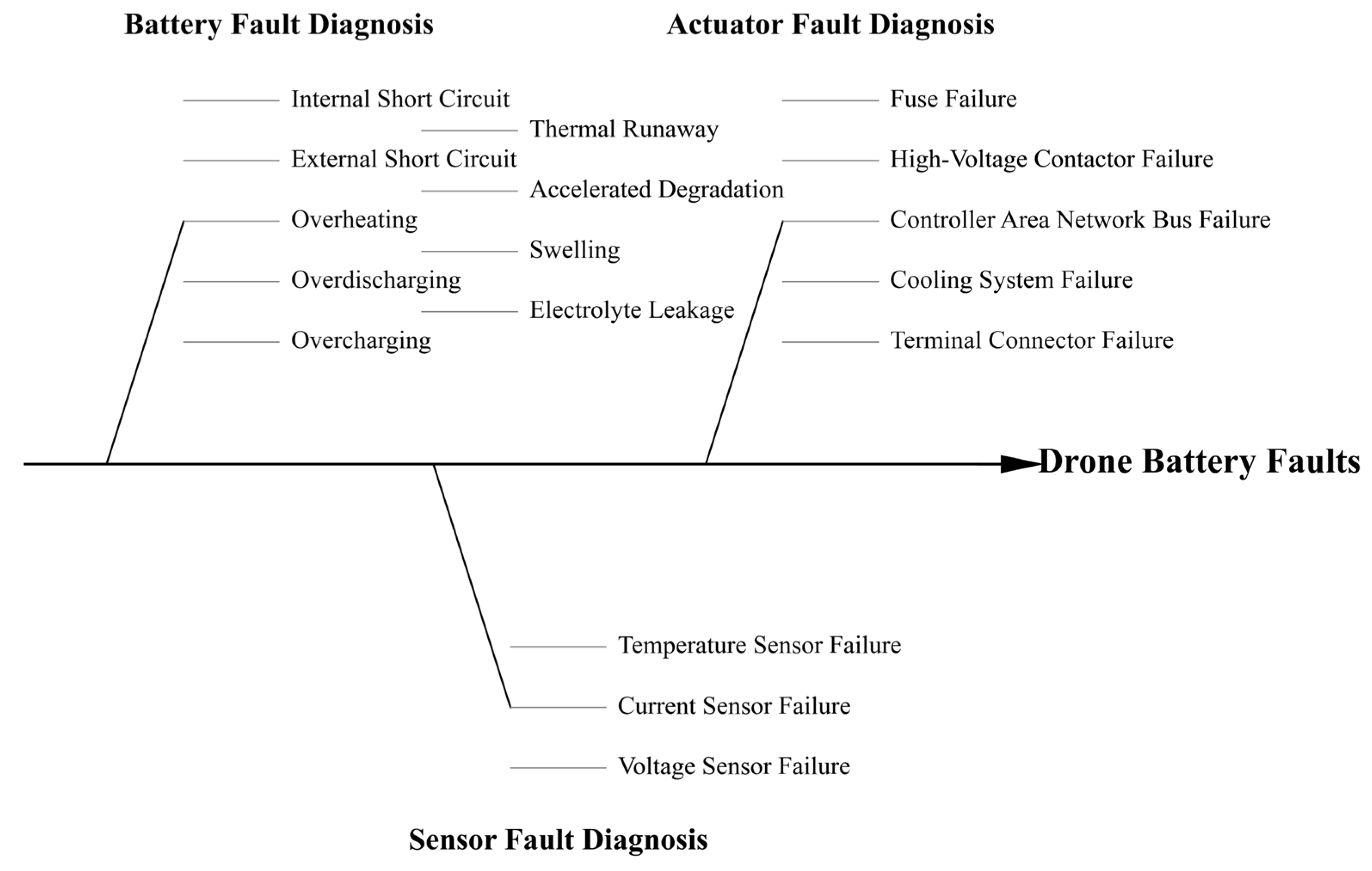
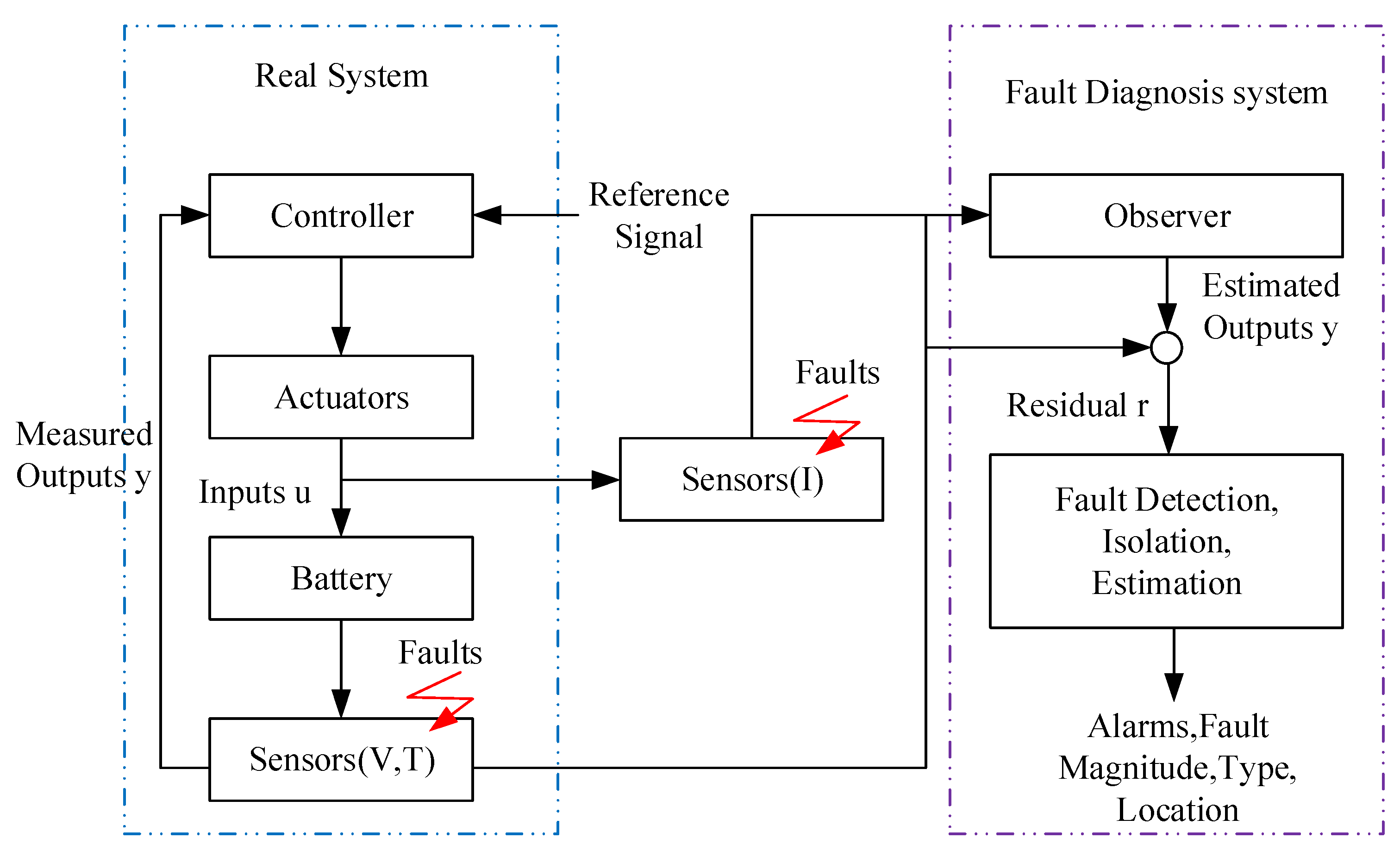
4.2. UAV Fault Diagnosis and Early Warning
4.2.1. Lithium-Ion Battery Fault Diagnosis
4.2.2. Sensor Fault Diagnosis
4.2.3. Actuator Fault Diagnosis
- Many battery fault mechanisms remain poorly understood, and there is no unified consensus on fault mechanisms in the existing literature;
- Standardized surrogate testing methods for battery faults have not yet been developed. Destructive methods often suffer from poor controllability and reproducibility and tend to trigger catastrophic faults instantaneously, which makes it difficult to simulate fault incubation phases;
- There is a lack of mature mathematical models that are capable of accurately describing certain fault behaviors—e.g., the modeling of lithium dendrite growth remains a significant challenge;
- The relationship between external symptoms and internal mechanisms is often unclear. Similar fault phenomena may arise from different causes, yet most existing studies focus on single fault mechanisms without accounting for interactions among multiple fault processes.
5. UAV Battery Management System Architecture and Balancing Strategies
5.1. Battery Charging and Control
5.2. Battery Balancing Strategies
5.3. Battery Energy Management Strategies
6. Conclusions and Future Perspectives
6.1. Core Contributions and Research Significance
6.2. Limitations of the Current Study
6.3. Future Research Challenges and Open Issues
6.4. Potential Impact and Application Prospects
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BMS | Battery Management System |
| UAS | Unmanned Aerial Systems |
| SOC | State of Charge |
| SOH | State of Health |
| SOE | State of Energy |
| SOP | State of Power |
| RUL | Remaining Useful Life |
| MTBF | Mean Time Between Failures |
| EKF | Extended Kalman Filter |
| P2D | Pseudo-Two-Dimensional Model |
| SP | Single Particle Model |
| ECM | Equivalent Circuit Model |
| OCV | Open Circuit Voltage |
| ANN | Artificial Neural Network |
| RNN | Recurrent Neural Network |
| LSTM | Long Short-Term Memory |
| GRU | Gated Recurrent Unit |
| CNN | Convolutional Neural Network |
| AE | Autoencoder |
| GAN | Generative Adversarial Network |
| LR | Linear Regression |
| PR | Polynomial Regression |
| SVR | Support Vector Regression |
| RFR | Random Forest Regression |
| GBR | Gradient Boosting Regression |
| KAF | Kernel Adaptive Filtering |
| PF | Particle Filtering |
| GA | Particle Filtering |
| PSO | Particle Swarm Optimization |
| DE | Differential Evolution |
| GWO | Grey Wolf Optimizer |
| DRL | Deep Reinforcement Learning |
| FLC | Fuzzy Logic Control |
| DTC | Decision Tree Classification |
| HMM | Hidden Markov Model |
| BN | Bayesian Network |
| FNN | Fuzzy Neural Network |
| DBN | Dynamic Bayesian Network |
| OCV-SOC | Open-Circuit Voltage-State of Charge |
| Ah | Ampere-hour |
| EM | Electrochemical Model |
| EIM | Electrochemical Impedance Model |
| FOM | Fractional Order Model |
| UKF | Unscented Kalman Filter |
| FE | Fuzzy Entropy |
| DOD | Depth of Discharge |
| LIB | Lithium-ion Battery |
| RBFNN | Radial Basis Function Neural Network |
| RMSE | Root Mean Square Error |
| MAE | Mean Absolute Error |
| ESC | External Short Circuit |
| ISC | Internal Short Circuit |
| TR | Thermal Runaway |
| PDE | Partial Differential Equation |
| MSS | Multi-level Screening Strategy |
| AEKF | Adaptive Extended Kalman Filter |
| CC | Constant Current |
| CV | Constant Voltage |
| CC-CV | Constant Current-Constant Voltage |
| MPC | Model Predictive Control |
| PINN | Physics-Informed Neural Network |
| EOL | End of Life |
| DVA | Dynamic Voltage Adjustment |
| KF | Kalman Filter |
| FOEKF | Fractional Order Extended Kalman Filter |
| ICAO | International Civil Aviation Organization |
References
- Telli, K.; Kraa, O.; Himeur, Y. A comprehensive review of recent research trends on unmanned aerial vehicles (uavs). Systems 2023, 11, 400. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Li, Y. Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends. Intell. Serv. Robot. 2023, 16, 109–137. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Onggowidjojo, V.; Ellitan, L. Strategies for Achieving Competitive Advantage: The Case of Amazon. Int. J. Res. 2023, 10, 249–265. [Google Scholar]
- Butcher, G.B. In the Eye of the Reaper: Drone Pilots, Remote War, and Resistance in the United States. Ph.D. Thesis, University of Colorado at Boulder, Boulder, CO, USA, 2024. [Google Scholar]
- MH/T 6043-2021; Airworthiness Standards for Medium Civil Unmanned Aircraft Systems. Civil Aviation Administration of China (CAAC): Beijing, China, 2021.
- T/CAAC 002–2022; Electric Multirotor Unmanned Aircraft Systems for Urban Logistics Scenarios. Civil Aviation Administration of China (CAAC): Beijing, China, 2022.
- Wanner, D.; Hashim, H.A.; Srivastava, S. UAV avionics safety, certification, accidents, redundancy, integrity, and reliability: A comprehensive review and future trends. Drone Syst. Appl. 2024, 12, 1–23. [Google Scholar] [CrossRef]
- Rajabi, M.S.; Beigi, P.; Aghakhani, S. Drone delivery systems and energy management: A review and future trends. In Handbook of Smart Energy Systems; Springer: Cham, Switzerland, 2023; pp. 1–19. [Google Scholar]
- Shibl, M.M.; Ismail, L.S.; Massoud, A.M. A machine learning-based battery management system for state-of-charge prediction and state-of-health estimation for unmanned aerial vehicles. J. Energy Storage 2023, 66, 107380. [Google Scholar] [CrossRef]
- Tian, A.; Dong, K.; Yang, X.G.; Wang, Y.; He, L.; Gao, Y.; Jiang, J. Physics-based parameter identification of an electrochemical model for lithium-ion batteries with two-population optimization method. Appl. Energy 2025, 378, 124748. [Google Scholar] [CrossRef]
- Amir, S.; Gulzar, M.; Tarar, M.O. Dynamic equivalent circuit model to estimate state-of-health of lithium-ion batteries. IEEE Access 2022, 10, 18279–18288. [Google Scholar] [CrossRef]
- Yao, L.; Xu, S.; Tang, A. A review of lithium-ion battery state of health estimation and prediction methods. World Electr. Veh. J. 2021, 12, 113. [Google Scholar] [CrossRef]
- Qin, D.; Li, L.; Wu, H. A composite progressive approach alternating between electrochemical model and data-driven model for the state of health assessment of lithium-ion batteries. J. Energy Storage 2024, 97, 112921. [Google Scholar] [CrossRef]
- Hossain, M.; Haque, M.E.; Arif, M.T. Kalman filtering techniques for the online model parameters and state of charge estimation of the Li-ion batteries: A comparative analysis. J. Energy Storage 2022, 51, 104174. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, X.; Zhang, H. Active acoustic emission sensing for fast co-estimation of state of charge and state of health of the lithium-ion battery. J. Energy Storage 2023, 64, 107192. [Google Scholar] [CrossRef]
- Mellit, A. An embedded solution for fault detection and diagnosis of photovoltaic modules using thermographic images and deep convolutional neural networks. Eng. Appl. Artif. Intell. 2022, 116, 105459. [Google Scholar] [CrossRef]
- Li, J.; Ye, M.; Ma, X. SOC estimation and fault diagnosis framework of battery based on multi-model fusion modeling. J. Energy Storage 2023, 65, 107296. [Google Scholar] [CrossRef]
- Dinh, M.C.; Le, T.T.; Park, M. A low-cost and high-efficiency active cell-balancing circuit for the reuse of EV batteries. Batteries 2024, 10, 61. [Google Scholar] [CrossRef]
- Li, H.; Kaleem, M.B.; Chiu, I.J. An intelligent digital twin model for the battery management systems of electric vehicles. Int. J. Green Energy 2024, 21, 461–475. [Google Scholar] [CrossRef]
- IEC 62619; Secondary Cells and Batteries Containing Alkaline or Other Non-Acid Electrolytes—Safety Requirements for Secondary Lithium Cells and Batteries, for Use in Industrial Applications. International Electrotechnical Commission (IEC): Geneva, Switzerland, 2017.
- Hildebrand, S.; Eddarir, A.; Lebedeva, N. Overview of Battery Safety Tests in Standards for Stationary Battery Energy Storage Systems; Publications Office of the European Union: Luxembourg, 2024. [Google Scholar]
- International Civil Aviation Organization. Technical Specifications for Unmanned Aircraft Systems (UAS); ICAO: Montreal, QC, Canada, 2020. [Google Scholar]
- Laghari, A.A.; Jumani, A.K.; Laghari, R.A. Unmanned aerial vehicles: A review. Cogn. Robot. 2023, 3, 8–22. [Google Scholar] [CrossRef]
- IEEE 1625; Standard for Rechargeable Batteries for Multi-Cell Mobile Computing Devices. Institute of Electrical and Electronics Engineers (IEEE) Standards Association: New York, NY, USA, 2004.
- GB/T 34131-2023; Technical Requirements for Civil Unmanned Aerial Vehicle Batteries. Standardization Administration of China (SAC): Beijing, China, 2023.
- ISO 21895; Unmanned Aircraft System Battery Communication Protocol. International Organization for Standardization (ISO): Geneva, Switzerland, 2021.
- IEEE P2836; Standard for Battery Management System Requirements for Unmanned Aerial Vehicles. Institute of Electrical and Electronics Engineers (IEEE) Standards Association: New York, NY, USA, 2024.
- IEC 62443-1-1; Industrial Communication Networks—Network and System Security—Part 1-1: Terminology, Concepts and Models. International Electrotechnical Commission (IEC): Geneva, Switzerland, 2009.
- Hussain, A.; Mao, Z.; Li, M. A Comprehensive Review of the Pseudo-Two-Dimensional (P2D) Model: Model Development, Solutions Methods, and Applications. Adv. Theory Simul. 2025, 8, 2401016. [Google Scholar] [CrossRef]
- Martínez-Rosas, E.; Vasquez-Medrano, R.; Flores-Tlacuahuac, A. Modeling and simulation of lithium-ion batteries. Comput. Chem. Eng. 2011, 35, 1937–1948. [Google Scholar] [CrossRef]
- Zhang, Q.; Guo, Q.; White, R.E. Semiempirical modeling of charge and discharge profiles for a LiCoO2 electrode. J. Power Sources 2007, 165, 427–435. [Google Scholar] [CrossRef]
- Sara, T.T.; Bernard, M.; Lantagne, G. Modeling and simulation of a commercial graphiteLiFePO4 cell in a full range of C-rates. J. Appl. Electrochem. 2018, 48, 1389–1400. [Google Scholar]
- Hussein, H.M.; Aghmadi, A.; Abdelrahman, M.S. A review of battery state of charge estimation and management systems: Models and future prospective. Wiley Interdiscip. Rev. Energy Environ. 2024, 13, e507. [Google Scholar]
- Wang, Y.; Zhang, X.; Li, K. Perspectives and challenges for future lithium-ion battery control and management. eTransportation 2023, 18, 100260. [Google Scholar] [CrossRef]
- Luo, W.; Lyu, C.; Wang, L. A new extension of physics-based single particle model for higher charge–discharge rates. J. Power Sources 2013, 241, 295–310. [Google Scholar] [CrossRef]
- Han, X.; Ouyang, M.; Lu, L. Simplification of physics-based electrochemical model for lithium ion battery on electric vehicle. Part I: Diffusion simplification and single particle model. J. Power Sources 2015, 278, 802–813. [Google Scholar] [CrossRef]
- Rahimian, S.K.; Rayman, S.; White, R.E. Extension of physics-based single particle model for higher charge–discharge rates. J. Power Sources 2013, 224, 180–194. [Google Scholar] [CrossRef]
- Goto, I.; Ohkuma, H.; Hongo, H. Feasibility Study of Modified Single-Particle Model for Composite Cathode at High-Rate Discharge. Electrochemistry 2016, 84, 432–437. [Google Scholar] [CrossRef]
- Graule, A.; Oehler, F.F.; Schmitt, J. Development and evaluation of a physicochemical equivalent circuit model for lithium-ion batteries. J. Electrochem. Soc. 2024, 171, 020503. [Google Scholar] [CrossRef]
- Tao, Z.; Zhao, Z.; Wang, C. State of charge estimation of lithium batteries: Review for equivalent circuit model methods. Measurement 2024, 236, 115148. [Google Scholar] [CrossRef]
- Tamilselvi, S.; Gunasundari, S.; Karuppiah, N. A review on battery modelling techniques. Sustainability 2021, 13, 10042. [Google Scholar] [CrossRef]
- Olabi, A.G.; Abdelghafar, A.A.; Soudan, B. Artificial neural network driven prognosis and estimation of Lithium-Ion battery states: Current insights and future perspectives. Ain Shams Eng. J. 2024, 15, 102429. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Y.; Cao, Y. An RNN with small sequence trained by multi-level optimization for SOC estimation in Li-ion battery applications. IEEE Trans. Veh. Technol. 2023, 72, 11469–11481. [Google Scholar] [CrossRef]
- Chung, D.W.; Ko, J.H.; Yoon, K.Y. State-of-charge estimation of lithium-ion batteries using LSTM deep learning method. J. Electr. Eng. Technol. 2022, 17, 1931–1945. [Google Scholar] [CrossRef]
- Cui, S.; Joe, I. A dynamic spatial-temporal attention-based GRU model with healthy features for state-of-health estimation of lithium-ion batteries. IEEE Access 2021, 9, 27374–27388. [Google Scholar] [CrossRef]
- Xu, H.; Wu, L.; Xiong, S. An improved CNN-LSTM model-based state-of-health estimation approach for lithium-ion batteries. Energy 2023, 276, 127585. [Google Scholar] [CrossRef]
- Hong, S.; Kang, M.; Kim, J. Investigation of denoising autoencoder-based deep learning model in noise-riding experimental data for reliable state-of-charge estimation. J. Energy Storage 2023, 72, 108421. [Google Scholar] [CrossRef]
- Gu, X.; See, K.W.; Liu, Y. A time-series Wasserstein GAN method for state-of-charge estimation of lithium-ion batteries. J. Power Sources 2023, 581, 233472. [Google Scholar] [CrossRef]
- Zequera, R.A.G.; Rassõlkin, A.; Vaimann, T. Charge diagnostics and state estimation of Battery Energy Storage Systems through Transformer models. IEEE Access 2025, 13, 17733–17744. [Google Scholar] [CrossRef]
- Vilsen, S.B.; Stroe, D.I. Battery state-of-health modelling by multiple linear regression. J. Clean. Prod. 2021, 290, 125700. [Google Scholar] [CrossRef]
- Yüksek, G.; Alkaya, A. A novel state of health estimation approach based on polynomial model for lithium-ion batteries. Int. J. Electrochem. Sci. 2023, 18, 100111. [Google Scholar] [CrossRef]
- Bianchi, V.; Stighezza, M.; Toscani, A. An improved method based on support vector regression with application independent training for state of charge estimation. IEEE Trans. Instrum. Meas. 2023, 72, 2524811. [Google Scholar] [CrossRef]
- Lipu, M.S.H.; Hannan, M.A.; Hussain, A. Real-time state of charge estimation of lithium-ion batteries using optimized random forest regression algorithm. IEEE Trans. Intell. Veh. 2022, 8, 639–648. [Google Scholar] [CrossRef]
- Li, G.; Li, B.; Li, C. Battery state of charge probabilistic estimation using natural gradient boosting. IEEE Trans. Ind. Electron. 2023, 71, 10636–10646. [Google Scholar] [CrossRef]
- Shi, H.; Liang, Y.; Wu, B. Time-Varying Non-parametric Remaining Useful Life of Systems Based on Adaptive Kernel Auxiliary Particle Filter. IEEE Trans. Instrum. Meas. 2025, 74, 3519414. [Google Scholar]
- Ahwiadi, M.; Wang, W. An enhanced particle filter technology for battery system state estimation and RUL prediction. Measurement 2022, 191, 110817. [Google Scholar] [CrossRef]
- Ma, Q.; Zou, C.; Wang, S. The state of charge estimation of lithium-ions battery using combined multi-population genetic algorithm-BP and Kalman filter methods. Int. J. Electrochem. Sci. 2022, 17, 220214. [Google Scholar] [CrossRef]
- He, M.; Wang, S.; Fernandez, C. A novel adaptive particle swarm optimization algorithm based high precision parameter identification and state estimation of lithium-ion battery. Int. J. Electrochem. Sci. 2021, 16, 21054. [Google Scholar] [CrossRef]
- Wang, C.; Xu, M.; Zhang, Q. Cooperative co-evolutionary differential evolution algorithm applied for parameters identification of lithium-ion batteries. Expert Syst. Appl. 2022, 200, 117192. [Google Scholar] [CrossRef]
- Wang, Q.; Sun, C.; Gu, Y. Research on SOC estimation method of hybrid electric vehicles battery based on the grey wolf optimized particle filter. Comput. Electr. Eng. 2023, 110, 108907. [Google Scholar] [CrossRef]
- Saba, I.; Tariq, M.; Ullah, M. Deep reinforcement learning based state of charge estimation and management of electric vehicle batteries. IET Smart Grid 2023, 6, 422–431. [Google Scholar] [CrossRef]
- Zhi, Y.; Wang, H.; Wang, L. A state of health estimation method for electric vehicle Li-ion batteries using GA-PSO-SVR. Complex Intell. Syst. 2022, 8, 2167–2182. [Google Scholar] [CrossRef]
- Liu, W.; Xu, Y.; Feng, X. Optimal fuzzy logic control of energy storage systems for V/f support in distribution networks considering battery degradation. Int. J. Electr. Power Energy Syst. 2022, 139, 107867. [Google Scholar] [CrossRef]
- Roman, D.; Saxena, S.; Robu, V. Machine learning pipeline for battery state-of-health estimation. Nat. Mach. Intell. 2021, 3, 447–456. [Google Scholar] [CrossRef]
- Lin, M.; You, Y.; Wang, W. Battery health prognosis with gated recurrent unit neural networks and hidden Markov model considering uncertainty quantification. Reliab. Eng. Syst. Saf. 2023, 230, 108978. [Google Scholar] [CrossRef]
- Huo, Q.; Ma, Z.; Zhao, X. Bayesian network based state-of-health estimation for battery on electric vehicle application and its validation through real-world data. IEEE Access 2021, 9, 11328–11341. [Google Scholar] [CrossRef]
- Ghosh, N.; Garg, A.; Panigrahi, B.K. An evolving quantum fuzzy neural network for online state-of-health estimation of Li-ion cell. Appl. Soft Comput. 2023, 143, 110263. [Google Scholar] [CrossRef]
- Zeng, L.; Zheng, J.; Yao, L. Dynamic Bayesian networks for feature learning and transfer applications in remaining useful life estimation. IEEE Trans. Instrum. Meas. 2022, 72, 108881. [Google Scholar] [CrossRef]
- Feng, X.; He, X.; Ouyang, M. A coupled electrochemical-thermal failure model for predicting the thermal runaway behavior of lithium-ion batteries. J. Electrochem. Soc. 2018, 165, A3748–A3765. [Google Scholar] [CrossRef]
- Xu, L.; Deng, Z.; Xie, Y. A novel hybrid physics-based and data-driven approach for degradation trajectory prediction in Li-ion batteries. IEEE Trans. Transp. Electrif. 2022, 9, 2628–2644. [Google Scholar] [CrossRef]
- Singh, S.; Ebongue, Y.E.; Rezaei, S. Hybrid modeling of lithium-ion battery: Physics-informed neural network for battery state estimation. Batteries 2023, 9, 301. [Google Scholar] [CrossRef]
- Zhou, W.; Zheng, Y.; Pan, Z. Review on the battery model and SOC estimation method. Processes 2021, 9, 1685. [Google Scholar] [CrossRef]
- Espedal, I.B.; Jinasena, A.; Burheim, O.S. Current trends for state-of-charge (SoC) estimation in lithium-ion battery electric vehicles. Energies 2021, 14, 3284. [Google Scholar] [CrossRef]
- Li, X.; Wang, P.; Wang, J.; Xiu, F.; Xia, Y. State of health estimation and prediction of electric vehicle power battery based on operational vehicle data. J. Energy Storage 2023, 72, 108247. [Google Scholar] [CrossRef]
- Liu, Z.M. Research on SOH Estimation Algorithm of Power Battery Based on LSTM-RNN; Guilin University of Electronic Science and Technology: Guilin, China, 2020. [Google Scholar]
- Vignesh, S.; Che, H.S.; Selvaraj, J. State of Health (SoH) estimation methods for second life lithium-ion battery—Review and challenges. Appl. Energy 2024, 369, 123542. [Google Scholar]
- Shrivastava, P.; Soon, T.K.; Idris, M.Y.I.B. Model-based state of X estimation of lithium-ion battery for electric vehicle applications. Int. J. Energy Res. 2022, 46, 10704–10723. [Google Scholar] [CrossRef]
- Reshma, P.; Manohar, V.J. Collaborative evaluation of SoC, SoP and SoH of lithium-ion battery in an electric bus through improved remora optimization algorithm and dual adaptive Kalman filtering algorithm. J. Energy Storage 2023, 68, 107573. [Google Scholar] [CrossRef]
- Vermeer, W.; Mouli, G.R.C.; Bauer, P. A comprehensive review on the characteristics and modeling of lithium-ion battery aging. IEEE Trans. Transp. Electrif. 2021, 8, 2205–2232. [Google Scholar] [CrossRef]
- Liu, J.; Zhou, L.; Zhang, Y. Aging behavior and mechanisms of lithium-ion battery under multi-aging path. J. Clean. Prod. 2023, 423, 138678. [Google Scholar] [CrossRef]
- Ng, M.-F.; Zhao, J.; Yan, Q.; Conduit, G.J.; She, Z.W. Predicting the state of charge and health of batteries using data-driven machine learning. Nat. Mach. Intell. 2020, 2, 161–170. [Google Scholar] [CrossRef]
- Ni, Z.; Yang, Y. A Combined Data-Model Method for State-of Charge Estimation of Lithium-Ion Batteries. IEEE Trans. Instrum. Meas. 2022, 71, 2503611. [Google Scholar] [CrossRef]
- Lee, J.; Won, J. Enhanced Coulomb Counting Method for SoC and SoH Estimation Based on Coulombic Efficiency. IEEE Access 2023, 11, 15449–15459. [Google Scholar] [CrossRef]
- Zhang, X.; Hou, J.; Wang, Z. Study of SOC estimation by the ampere-hour integral method with capacity correction based on LSTM. Batteries 2022, 8, 170. [Google Scholar] [CrossRef]
- Tran, M.-K. A comprehensive equivalent circuit model for lithium-ion batteries, incorporating the effects of state of health, state of charge, and temperature on model parameters. J. Energy Storage 2021, 43, 103252. [Google Scholar] [CrossRef]
- Hou, G.; Liu, X.; He, W. An equivalent circuit model for battery thermal management system using phase change material and liquid cooling coupling. J. Energy Storage 2022, 55, 105834. [Google Scholar] [CrossRef]
- Maheshwari, A.; Nageswari, S. Effect of Noise Covariance Matrices on State of Charge Estimation Using Extended Kalman Filter. IETE J. Res. 2022, 69, 8130–8141. [Google Scholar] [CrossRef]
- Peng, X.B. Real-Time State of Charge Estimation of the Extended Kalman Filter and Unscented Kalman Filter Algorithms Under Different Working Conditions. J. Electrochem. Energy Convers. Storage 2021, 18, 041007. [Google Scholar] [CrossRef]
- Lai, X. A novel method for state of energy estimation of lithiumion batteries using particle filter and extended Kalman filter. J. Energy Storage 2021, 43, 103269. [Google Scholar] [CrossRef]
- Lin, B. An Adversarial Network-based Multi-model Black-box Attack. Intell. Autom. Soft Comput. 2021, 30, 641649. [Google Scholar] [CrossRef]
- Chen, Y.; Li, R.; Sun, Z. SOC estimation of retired lithium-ion batteries for electric vehicle with improved particle filter by H-infinity filter. Energy Rep. 2023, 9, 1937–1947. [Google Scholar] [CrossRef]
- Laadjal, K.; Marques Cardoso, A.J. A review of supercapacitors modeling, SoH, and SoE estimation methods: Issues and challenges. Int. J. Energy Res. 2021, 45, 18424–18440. [Google Scholar] [CrossRef]
- Liu, K.; Gao, Y.; Zhu, C.; Li, K.; Fei, M.; Peng, C.; Zhang, X.; Han, Q.-L. Electrochemical modeling and parameterization towards control-oriented management of lithium-ion batteries. Control Eng. Pract. 2022, 124, 105176. [Google Scholar] [CrossRef]
- Kim, J.; Chun, H.; Baek, J. Parameter identification of lithium-ion battery pseudo-2-dimensional models using genetic algorithm and neural network cooperative optimization. J. Energy Storage 2022, 45, 103571. [Google Scholar] [CrossRef]
- Li, H.; Saini, A.; Liu, C. Electrochemical and thermal characteristics of prismatic lithium-ion battery based on a three-dimensional electrochemical-thermal coupled model. J. Energy Storage 2021, 42, 102976. [Google Scholar] [CrossRef]
- Lim, K.; Bastawrous, H.A.; Duong, V.H.; See, K.W.; Zhang, P.; Dou, S.X. Fading kalman filter-based real-time state of charge estimation in lifepo4 battery-powered electric vehicles. Energy 2016, 169, 40–48. [Google Scholar] [CrossRef]
- Zhang, Q.; Shang, Y.; Li, Y.; Cui, N.; Duan, B.; Zhang, C. A novel fractional variable-order equivalent circuit model and parameter identification of electric vehicle li-ion batteries. ISA Trans. 2020, 97, 448–457. [Google Scholar] [CrossRef]
- Fu, B.; Li, Y.; Liu, K. A Physical-Data Fusion Framework for Lithium-ion Battery SOC Estimation. In Proceedings of the IECON 2023—49th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 16–19 October 2023; pp. 1–6. [Google Scholar]
- Chen, T.; Guo, J.W.; Zhang, R. Lithium battery soc-soh joint estimation method based on dual UKF filter Marine power technology. Mar. Electr. Electron. Eng. 2020, 40, 95–100. [Google Scholar] [CrossRef]
- Ipek, E.; Yilmaz, M. A novel method for SOC estimation of Li-ion batteries using a hybrid machine learning technique. Turk. J. Electr. Eng. Comput. Sci. 2021, 29, 18–31. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Z.; Chen, J.; Liao, C. The adaptive kernel-based extreme learning machine for state of charge estimation. Ionics 2023, 29, 1863–1872. [Google Scholar] [CrossRef]
- Li, Y.; Ding, P.; Zheng, L. Optimized Training Options of a Deep Learning Model for Lithium-Ion Battery State of Charge Estimation. In Proceedings of the 2023 IEEE International Future Energy Electronics Conference (IFEEC), Sydney, Australia, 20–23 November 2023; pp. 267–270. [Google Scholar]
- Sui, X. Robust State of Health Estimation for Lithium-Ion Batteries Using Machine Learning. Ph.D. Dissertation, Aalborg University, Aalborg, Denmark, 2022. [Google Scholar]
- Reddy, M.S.; Padhy, N.P. SOH Based Power Sharing Algorithm for Second-life Batteries Using Health Factors. In Proceedings of the 2024 Third International Conference on Power, Control and Computing Technologies (ICPC2T), Raipur, India, 18–20 January 2024; pp. 663–668. [Google Scholar]
- Hein, W.Y.; Narang, A.; Tafti, H.D.; Farivar, G.; Ceballos, S.; Pou, J. Minimizing energy storage utilization in a stand-alone dc microgrid using photovoltaic flexible power control. IEEE Trans. Smart Grid 2021, 12, 3755–3764. [Google Scholar] [CrossRef]
- Li, Y.; Luan, J.; Yang, Y. Remaining Lifetime Estimation of Retired Batteries Based on Multiple Deep Neural Network Ensembles. In Proceedings of the 2023 IEEE 2nd International Power Electronics and Application Symposium (PEAS), Guangzhou, China, 10–13 November 2023; pp. 1942–1944. [Google Scholar]
- Yan, Q.; Wang, Y. Predicting for power battery SOC based on neural network. In Proceedings of the 2017 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 4140–4143. [Google Scholar]
- Demirci, O.; Taskin, S.; Schaltz, E. Review of battery state estimation methods for electric vehicles-Part I: SOC estimation. J. Energy Storage 2024, 87, 111435. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, L.; Sun, F.; Wang, Z. An overview on thermal safety issues of lithium-ion batteries for electric vehicle application. IEEE Access 2018, 6, 23848–23863. [Google Scholar] [CrossRef]
- Chaoui, H.; Ibe-Ekeocha, C.C. State of charge and state of health estimation for lithium batteries using recurrent neural networks. IEEE Trans. Veh. Technol. 2017, 66, 8773–8783. [Google Scholar] [CrossRef]
- Hafizhahullah, H. A Hybrid CNN-LSTM for Battery Remaining Useful Life Prediction with Charging Profiles Data. In Proceedings of the ACM International Conference Proceeding Series, New York, NY, USA, 22–23 November 2022; pp. 106–110. [Google Scholar] [CrossRef]
- Rastegarpanah, A.; Wang, Y.; Stolkin, R. Predicting the Remaining Life of Lithium-ion Batteries Using a CNN-LSTM Model. In Proceedings of the 2022 8th International Conference on Mechatronics and Robotics Engineering, ICMRE 2022, Munich, Germany, 10–12 February 2022; pp. 73–78. [Google Scholar] [CrossRef]
- Rastegarpanah, A.; Contreras, C.A.; Stolkin, R. Hyperparameter-optimized CNN and CNN-LSTM for Predicting the Remaining Useful Life of Lithium-Ion Batteries. In Proceedings of the 2023 Eleventh International Conference on Intelligent Computing and Information Systems (ICICIS), Cairo, Egypt, 21–23 November 2023; pp. 110–115. [Google Scholar]
- Martiri, L.; Azzalini, D.; Flammini, B. Improving Remaining Useful Life Estimation of Lithium-Ion Batteries when Nearing End of Life. In Proceedings of the 2023 IEEE International Conference on Metrology for eXtended Reality, Artificial Intelligence and Neural Engineering (MetroXRAINE), Milano, Italy, 25–27 October 2023; pp. 317–322. [Google Scholar]
- Hwang, J.H.; Lee, J.H.; Lee, I.S. Analysis and Diagnosis of the Effect of Voltage and Current Sensor Faults on the State of Charge Estimation of Lithium-ion Batteries Based on Neural Networks. Int. J. Control. Autom. Syst. 2024, 22, 1691–1706. [Google Scholar] [CrossRef]
- Arshad, F.; Lin, J.; Manurkar, N. Life cycle assessment of lithium-ion batteries: A critical review. Resour. Conserv. Recycl. 2022, 180, 106164. [Google Scholar] [CrossRef]
- Hong, J.; Liang, F.; Yang, J. An exhaustive review of battery faults and diagnostic techniques for real-world electric vehicle safety. J. Energy Storage 2024, 99, 113234. [Google Scholar] [CrossRef]
- Kaliaperumal, M.; Dharanendrakumar, M.S.; Prasanna, S. Cause and mitigation of lithium-ion battery failure—A review. Materials 2021, 14, 5676. [Google Scholar] [CrossRef]
- Zheng, Y.; Che, Y.; Hu, X. Thermal state monitoring of lithium-ion batteries: Progress, challenges, and opportunities. Prog. Energy Combust. Sci. 2024, 100, 101120. [Google Scholar] [CrossRef]
- Shang, Y.; Wang, S.; Tang, N. Research progress in fault detection of battery systems: A review. J. Energy Storage 2024, 98, 113079. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, P.; Liu, Y. Variable-order equivalent circuit modeling and state of charge estimation of lithium-ion battery based on electrochemical impedance spectroscopy. Energies 2021, 14, 769. [Google Scholar] [CrossRef]
- Song, Y.; Yu, J.; Zhou, J. Detection of voltage fault in lithium-ion battery based on equivalent circuit model-informed neural network. IEEE Trans. Instrum. Meas. 2024, 73, 3508010. [Google Scholar] [CrossRef]
- Li, X.; Lyu, M.; Gao, X. An adaptive threshold method for multi-faults diagnosis of lithium-ion batteries based on electro-thermal model. Measurement 2023, 222, 113671. [Google Scholar] [CrossRef]
- Feng, Y.; Zhu, X.; Wang, Y. PDE model-based on-line cell-level thermal fault localization framework for batteries. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 2507–2516. [Google Scholar] [CrossRef]
- Niu, G. Data-Driven Technology for Engineering Systems Health Management; Springer: Singapore, 2017. [Google Scholar]
- Shrivastava, P.; Soon, T.K.; Idris, M.Y.B. Lithium-ion battery model parameter identification using modified adaptive forgetting factor-based recursive least square algorithm. In Proceedings of the 2021 IEEE 12th Energy Conversion Congress & Exposition-Asia (ECCE-Asia), Singapore, 24–27 May 2021; pp. 2169–2174. [Google Scholar]
- Yang, Q.; Sun, J.; Kang, Y. Internal short circuit detection and evaluation in battery packs based on transformation matrix and an improved state-space model. Energy 2023, 276, 127555. [Google Scholar] [CrossRef]
- Zhang, L.; Xia, B.; Zhang, F. Adaptive fault detection for lithium-ion battery combining physical model-based observer and BiLSTMNN learning approach. J. Energy Storage 2024, 91, 112067. [Google Scholar] [CrossRef]
- Chen, G.; Li, S.; He, Q. Fault diagnosis of drone motors driven by current signal data with few samples. Meas. Sci. Technol. 2024, 35, 086202. [Google Scholar] [CrossRef]
- Cabahug, J.; Eslamiat, H. Failure detection in quadcopter UAVs using K-means clustering. Sensors 2022, 22, 6037. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, P.; Wang, Z. Fault and defect diagnosis of battery for electric vehicles based on big data analysis methods. Appl. Energy 2017, 207, 354–362. [Google Scholar] [CrossRef]
- Kim, T. Outlier mining-based fault diagnosis for multicell lithium-ion batteries using a low-priced microcontroller. In Proceedings of the 2018 IEEE Applied Power Electronics Conf. and Exposition (APEC), San Antonio, TX, USA, 4–8 March 2018; p. 33653369. [Google Scholar] [CrossRef]
- Kim, T.; Makwana, D.; Adhikaree, A.; Vagdoda, J.; Lee, Y. Cloud-based battery condition monitoring and fault diagnosis platform for large-scale lithium-ion battery energy storage systems. Energies 2018, 11, 125. [Google Scholar] [CrossRef]
- Guo, K.; Wang, N.; Liu, D. Uncertainty-aware LSTM based dynamic flight fault detection for UAV actuator. IEEE Trans. Instrum. Meas. 2022, 72, 1–13. [Google Scholar] [CrossRef]
- Muddappa, V.K.; Anwar, S. Electrochemical model based fault diagnosis of li-ion battery using fuzzy logic. ASME 2014 Int. Mech. Eng. Congr. Expo. 2014, 37134, V04BT04A048. [Google Scholar] [CrossRef]
- Gan, W.; Li, X.; Wei, D. Real-Time Multi-Sensor Joint Fault Diagnosis Method for Permanent Magnet Traction Drive Systems Based on Structural Analysis. Sensors 2024, 24, 2878. [Google Scholar] [CrossRef] [PubMed]
- Yang, J.; Jung, J.; Ghorbanpour, S. Data–Driven Fault Diagnosis and Cause Analysis of Battery Pack with Real Data. Energies 2022, 15, 1647. [Google Scholar] [CrossRef]
- Xia, B.; Nguyen, T.; Yang, J.; Mi, C. The improved interleaved voltage measurement method for series connected battery packs. J. Power Sources 2016, 334, 12–22. [Google Scholar] [CrossRef]
- Kang, Y.; Duan, B.; Zhou, Z.; Shang, Y.; Zhang, C. A multi-fault diagnostic method based on an interleaved voltage measurement topology for series connected battery packs. J. Power Sources 2019, 417, 132–144. [Google Scholar] [CrossRef]
- Zhang, K.; Hu, X.; Liu, Y. Multi-fault detection and isolation for lithium-ion battery systems. IEEE Trans. Power Electron. 2021, 37, 971–989. [Google Scholar] [CrossRef]
- Yan, Y.; Luo, W.; Wang, Z. Fault diagnosis of lithium-ion battery sensors based on multi-method fusion. J. Energy Storage 2024, 85, 110969. [Google Scholar] [CrossRef]
- Mercorelli, P. Recent advances in intelligent algorithms for fault detection and diagnosis. Sensors 2024, 24, 2656. [Google Scholar] [CrossRef]
- Mukherjee, S.; Chowdhury, K. State of charge estimation techniques for battery management system used in electric vehicles: A review. Energy Syst. 2023, 6, 100328. [Google Scholar] [CrossRef]
- Zhang, Y.; Shaoping, W.; Jian, S.H.I. SAR performance-based fault diagnosis for electro-hydraulic control system: A novel FDI framework for closed-loop system. Chin. J. Aeronaut. 2022, 35, 381–392. [Google Scholar] [CrossRef]
- Shahzad, E.; Khan, A.U.; Iqbal, M. Sensor fault-tolerant control of microgrid using robust sliding-mode observer. Sensors 2022, 22, 2524. [Google Scholar] [CrossRef]
- Vafamand, N.; Arefi, M.M.; Asemani, M.H. Dual-EKF-based fault-tolerant predictive control of nonlinear DC microgrids with actuator and sensor faults. IEEE Trans. Ind. Appl. 2022, 58, 5438–5446. [Google Scholar] [CrossRef]
- Tudoroiu, N.; Zaheeruddin, M.; Tudoroiu, R.E. Investigations on using intelligent learning techniques for anomaly detection and diagnosis in sensors signals in Li-ion battery—Case study. Inventions 2023, 8, 74. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, L.; Li, L. Progress on the Fault Diagnosis Approach for Lithium-ion Battery Systems: Advances, Challenges, and Prospects. Prot. Control. Mod. Power Syst. 2024, 9, 16–41. [Google Scholar] [CrossRef]
- Puchalski, R.; Giernacki, W. UAV fault detection methods, state-of-the-art. Drones 2022, 6, 330. [Google Scholar] [CrossRef]
- Liu, Z.; He, H.; Ahmed, Q.; Rizzoni, G. Structural analysis based fault detection and isolation applied for a lithium-ion battery pack. IFAC-Pap. 2015, 48, 1465–1470. [Google Scholar] [CrossRef]
- Fan, T.E.; Chen, F.; Lei, H.R. Fault diagnosis for lithium-ion battery pack based on relative entropy and state of charge estimation. Batteries 2024, 10, 217. [Google Scholar] [CrossRef]
- Hu, J.; Cheng, Y.; Yu, H. Research on Early Fault Diagnosis of Lithium Batteries Based on WOA-VMD and Shannon Entropy. Automot. Eng. 2024, 46, 1189–1196. [Google Scholar]
- Zhang, F.; Zheng, X.; Xing, Z. Fault Diagnosis Method for Lithium-Ion Power Battery Incorporating Multidimensional Fault Features. Energies 2024, 17, 1568. [Google Scholar] [CrossRef]
- Liu, R.; Li, Z.; Deng, Y. Performance evaluation of information fusion systems based on belief entropy. Eng. Appl. Artif. Intell. 2024, 127, 107262. [Google Scholar] [CrossRef]
- Liu, B.; Bi, X.; Gu, L. Application of a Bayesian network based on multi-source information fusion in the fault diagnosis of a radar receiver. Sensors 2022, 22, 6396. [Google Scholar] [CrossRef]
- Bdour, J.; Sababha, B.H. A hybrid thrusting system for increasing the endurance time of multirotor unmanned aerial vehicles. Int. J. Adv. Robot. Syst. 2023, 20, 17298806231172335. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Khan, M.A.; Amjad, H.; Żywiołek, J. A comprehensive review of micro UAV charging techniques. Micromachines 2022, 13, 977. [Google Scholar] [CrossRef]
- Cai, C.; Wang, J.; Nie, H.; Zhang, P.; Lin, Z.; Zhou, Y.-G. Effectiveconfiguration WPT systems for drones charging area extension featuring quasi-uniform magnetic coupling. IEEE Trans. Transport. Electrif. 2020, 6, 920–934. [Google Scholar] [CrossRef]
- Ghaeminezhad, N.; Monfared, M. Charging control strategies for lithium-ion battery packs: Review and recent developments. IET Power Electron. 2022, 15, 349–367. [Google Scholar] [CrossRef]
- Kıvrak, S.; Özer, T.; Og, Y.; Kelek, M.M. Novel active and passive balancing method-based battery management system design and implementation. J. Power Electron. 2021, 21, 1855–1865. [Google Scholar] [CrossRef]
- Feng, F.; Hu, X.; Liu, J.; Lin, X.; Liu, B. A review of equalization strategies for series battery packs: Variables, objectives, and algorithms. Renew. Sustain. Energy Rev. 2019, 116, 109464. [Google Scholar] [CrossRef]
- Zhang, X.; Zhang, X. Battery management system of UAV based on IoT. Front. Comput. Intell. Syst. 2022, 1, 41–43. [Google Scholar] [CrossRef]
- Hu, H.; Yuan, W.W.; Su, M. Optimizing fuel economy and durability of hybrid fuel cell electric vehicles using deep reinforcement learning-based energy management systems. Energy Convers. Manag. 2023, 291, 117288. [Google Scholar] [CrossRef]
- Dong, G.; Yang, F.; Tsui, K.-L.; Zou, C. Active balancing of lithiumion batteries using graph theory and A-star search algorithm. IEEE Trans. Ind. Inform. 2021, 17, 2587–2599. [Google Scholar] [CrossRef]
- Jinlei, S.; Wei, L.; Chuanyu, T.; Tianru, W.; Tao, J.; Yong, T. A novel active equalization method for series-connected battery packs based on clustering analysis with genetic algorithm. IEEE Trans. Power Electron. 2021, 36, 7853–7865. [Google Scholar] [CrossRef]
- Aghajan-Eshkevari, S.; Azad, S.; Nazari-Heris, M. Charging and discharging of electric vehicles in power systems: An updated and detailed review of methods, control structures, objectives, and optimization methodologies. Sustainability 2022, 14, 2137. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, L.; Zhou, Y. Energy management strategies for fuel cell hybrid electric vehicles: Classification, comparison, and outlook. Energy Convers. Manag. 2022, 270, 116179. [Google Scholar] [CrossRef]
- Chen, X.; Li, M.; Chen, Z. Meta rule-based energy management strategy for battery/supercapacitor hybrid electric vehicles. Energy 2023, 285, 129365. [Google Scholar] [CrossRef]
- Ding, N.; Prasad, K.; Lie, T.T. Design of a hybrid energy management system using designed rule-based control strategy and genetic algorithm for the series-parallel plug-in hybrid electric vehicle. Int. J. Energy Res. 2021, 45, 1627–1644. [Google Scholar] [CrossRef]
- Lei, T.; Wang, Y.; Jin, X.; Min, Z.; Zhang, X.; Zhang, X. An optimal fuzzy logic-based energy management strategy for a fuel cell/battery hybrid power unmanned aerial vehicle. Aerospace 2022, 9, 115. [Google Scholar] [CrossRef]
- Marqués, R.; Montero, Á.; Sánchez-Diaz, C. Design methodology and simulation analysis of hybrid fuel cell and battery systems for powering unmanned aircraft systems. Energy Convers. Manag. 2024, 306, 118303. [Google Scholar] [CrossRef]
- Tian, W.; Liu, L.; Zhang, X.; Yang, D. Double-layer fuzzy adaptive NMPC coordinated control method of energy management and trajectory tracking for hybrid electric fixed wing UAVs. Int. J. Hydrogen Energy 2022, 47, 39239–39254. [Google Scholar] [CrossRef]
- Yao, Y.; Wang, J.; Zhou, Z.; Li, H.; Liu, H.; Li, T. Grey Markov prediction-based hierarchical model predictive control energy management for fuel cell/battery hybrid unmanned aerial vehicles. Energy 2023, 262, 125405. [Google Scholar] [CrossRef]
- Jiao, S.; Zhang, G.; Zhou, M. A comprehensive review of research hotspots on battery management systems for UAVs. IEEE Access 2023, 11, 84636–84650. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Metric | Definition | Expression | Description |
|---|---|---|---|
| Capacity Retention Rate | Ratio of remaining capacity to initial capacity after specified cycles | ≥80% after 500 cycles | Measures performance degradation, ensuring endurance capability |
| Power Output Stability | Range of power output fluctuations under varying discharge rates | Fluctuations ≤ ±5% | Ensures stable power delivery under dynamic loads |
| Cycle Life | Number of cycles completed before capacity degrades to 80% | Reflects battery durability | |
| Calendar Life | Time until battery reaches performance threshold under specified conditions | Accounts for aging in non-flight states, suitable for long-term deployed UAVs |
| Metric | Definition | Expression | Description |
|---|---|---|---|
| Environmental Adaptability | Ability to operate normally under extreme temperature, humidity, and high-altitude conditions | Ensures stable operation in diverse environments, compliant with ICAO standards | |
| Dynamic Response Capability | Power output retention during sudden load changes | Non-condensing ≥90% power output during load transitions | Addresses highly dynamic tasks like takeoff and acceleration, preventing power shortages |
| Single-Flight Availability | Probability of normal operation during a single flight mission | ≥95% availability per flight | Measures mission reliability, critical for commercial UAVs requiring high availability |
| Mean Time Between Failures | Average time between consecutive failures | Reflects long-term operational stability, used for maintenance scheduling evaluation |
| Metric | Definition | Expression | Description |
|---|---|---|---|
| Redundancy Design Capability | Single-point failures have no impact on system operation | N + 1 Structural | Module failures do not affect overall system operation |
| Thermal Runaway Early Warning Time | Time interval from abnormal temperature rise to alarm activation | ≥10 min | Allows the system to initiate cooling or shutdown measures |
| Thermal Runaway Propagation Suppression Time | Time required to control fire or thermal propagation | ≥30 min | Provides a window for emergency response measures |
| Electromagnetic Compatibility | Performance remains unaffected under electromagnetic interference | No performance degradation with 10 KV/m | Ensures strong anti-interference capability, enabling operation in complex electromagnetic environments |
| Metric | Definition | Expression | Description |
|---|---|---|---|
| Cost per Flight | Average energy cost per flight over the battery’s full lifecycle | Cost per flight ≤ 0.05 USD/Wh | Reflects economic efficiency and helps optimize logistics drone operational costs |
| Maintenance Cost Ratio | Proportion of maintenance costs to the total system cost | Indicates maintenance burden; lower ratios are preferred | |
| Recycling Rate | Proportion of battery materials that can be recycled and reused after decommissioning | Highlights resource recovery efficiency and environmental sustainability |
| Metric | Definition | Expression | Description |
|---|---|---|---|
| Communication Interoperability | Compatibility of battery system communication with other UAV subsystems | Compliance with ISO 21895 communication protocol | Ensures seamless integration with flight control and charging systems, enhancing overall system efficiency |
| Mission Support Capability | Battery’s ability to provide dynamic power output for mission tasks | Power response time ≤ 100 ms | Satisfies the requirements of highly dynamic tasks such as frequent takeoffs and landings |
| Module Consistency | Consistency of key parameters (e.g., voltage, temperature) among battery cells within a pack | Improves overall battery pack performance and extends service life |
| Metric | Definition | Expression | Description |
|---|---|---|---|
| Cybersecurity | System’s ability to resist cyberattacks | Compliance with IEC 62443 [29] | Enhances the battery management system’s (BMS) resilience against DDoS attacks and ensures the security of mission-critical data |
| Explainability of Artificial Intelligence | Transparency of fault prediction models | Application of SHAP, LIME, etc. | Improves algorithm controllability and trustworthiness |
| Carbon Footprint | Carbon emissions generated per unit of energy produced | Reduces emissions during production, usage, and recycling processes, supporting green aviation initiatives |
| Method | Advantage | Disadvantage |
|---|---|---|
| Rule-based | Easy to implement and available online | It is greatly affected by human factors and faces uncertainty in the actual situation |
| Optimization-based | The prediction effect is good and the constraints can be handled | The generalization ability is poor |
| Intelligent algorithm-based | It does not depend on the model and has strong generalization ability | The design is not systematic, and the fuzzy processing of information may reduce the accuracy |
| Research Area | Main Methods | Advantages | Disadvantages | |
|---|---|---|---|---|
| Reliability Modeling | Mathematical Models | Electrochemical Models (P2D, SP, Extended SP) [30,34,36] | High accuracy, clear physical mechanisms | Complex modeling, large computational load, requires detailed parameters |
| Equivalent Circuit Models (RC, Thevenin, PNGV, Improved Thevenin) [40,41,42] | Simple modeling, suitable for real-time computation | Lower accuracy, parameters prone to drift | ||
| Data-driven Models | Neural Network-based (ANN, RNN, LSTM, GRU, CNN, AE, GAN, Transformer) [43,44,45,46,47,48,49,50] | Powerful nonlinear modeling ability, suitable for time series and high-dimensional features | Requires large training data, lack of interpretability | |
| Regression-based (Linear Regression, Polynomial Regression, SVR, RFR, GBR, KAF) [51,52,53,54,55,56] | Fast modeling, high accuracy, suitable for small samples | Limited generalization ability, sensitive to anomalies | ||
| Optimization-based (PF, GA, PSO, DE, GWO, DRL, Hybrid Optimization) [57,58,59,60,61,62,63] | Useful for parameter tuning, strong adaptability | Prone to local optima, slow convergence | ||
| Logic-based (Fuzzy Logic Control, Decision Tree Classification, HMM, Bayesian Networks) [64,65,66,67,68,69] | Strong interpretability, suitable for uncertain problems | Rule setting depends on experience, weak generalization ability | ||
| Hybrid Models | Serial (Mechanism model + data-driven correction) [70] | Combines advantages of physical and data models, good robustness | Complex implementation, requires balancing inputs and outputs of both models | |
| Parallel (Fusion of mechanism and data-driven outputs) [71] | More robust output, high accuracy | Complex data synchronization and fusion method | ||
| Embedded (Physical knowledge embedded in data-driven model) [72] | Improves generalization, provides some physical interpretability | Difficult to construct, requires rich prior knowledge | ||
| State Estimation | Based on Battery Characteristic Analysis | Lookup Table, Open Circuit Voltage, Coulomb Counting Methods [110] | Simple and easy to implement, suitable for online estimation | Low accuracy, highly affected by environment |
| Model-based Methods | Electrochemical, Equivalent Circuit, EIS, Fractional-order Models [31,41] | High accuracy, strong interpretability | Complex modeling, high computational burden, strong parameter dependency | |
| Data-driven Methods | Machine Learning (SVM, ANN, FL); Deep Learning (GA, PSO, EKF, UKF) [43,44,45,46,47,48,49,50,51,52,53,54,55,56,57,58,59,60,61,62,63,64,65,66,67,68,69] | High accuracy, strong adaptability | Relies on historical data, generalization ability needs to be verified | |
| Hybrid Methods | Mechanism Model + Data-driven [70,71,72] | Combines physical interpretability and data adaptability, more stable results | Complex model structure, high construction cost | |
| Data-driven + Data-driven [70,71,72] | Leverages multiple model advantages for integration, improved robustness | Fusion algorithm needs rational design, risk of overfitting | ||
| Fault Diagnosis | Lithium-ion Battery Fault Diagnosis | Model-based Methods [121,122,123,124,125,126,127,128,129] | Strong interpretability, capable of accurately identifying known fault mechanisms | Complex modeling, dependent on accurate parameters and prior knowledge |
| Data-driven Methods [130,131,132,133] | Independent of physical models, adaptable to complex conditions | Requires large historical data, difficult to interpret causes of anomalies | ||
| Knowledge-based Methods [134] | Can utilize expert knowledge, suitable for rule-based scenarios | Dependent on expert experience, difficult to handle novel faults | ||
| Integrated Methods [135,136] | Multi-model fusion, wide applicability, high robustness | Complex systems, difficult fusion strategy design | ||
| Sensor Fault Diagnosis | Based on Sensor Topology [137,138,139] | Detects correlations between sensors, suitable for redundant systems | Strong structural dependence, high requirements on sensor layout | |
| Model-based Methods [140,141,142,143,144,145,146,147,148,149] | High accuracy, suitable for quantitative diagnosis | High demand for model accuracy and signal quality | ||
| Fusion Methods [150] | Multi-source information fusion, strong fault detection capability | Complex construction, fusion algorithm requires optimization | ||
| Actuator Fault Diagnosis | Model-based Techniques [151,152] | Can identify common actuator faults, suitable for system-level analysis | Complex implementation, requires system modeling capabilities | |
| Signal Processing Techniques [153,154,155,156] | Capable of online monitoring, strong real-time data processing | Strongly affected by noise, feature extraction depends on algorithm design | ||
| Battery Management System | Battery Charging and Control | Non-feedback Type [160] | Simple to implement, suitable for fixed conditions | Lacks adaptability, prone to overcharge or undercharge |
| Feedback Type [160] | Strong dynamic adjustment capability, adaptable to load variation | Complex control strategies, requires real-time sampling | ||
| Intelligent Type [160] | Predictive and optimization capability, enhances efficiency and lifespan | High algorithm complexity, depends on high-quality data and computational resources | ||
| Battery Balancing Strategy | Passive Balancing [161] | Simple circuit structure, low cost, easy to implement | Energy dissipated as heat, low efficiency, accelerates aging | |
| Active Balancing [162] | Energy can be transferred and reused, high efficiency, prolongs battery life | Complex circuits, high cost, difficult control strategy design | ||
| Energy Management Strategy | Rule-based [168,169] | Simple implementation, fast execution, suitable for clearly defined rules | Lacks flexibility, cannot adapt to complex dynamic environments | |
| Optimization-based [168,173] | Enables multi-objective coordinated control, high efficiency | Slow solving speed, high requirement on model accuracy and computational resources | ||
| Intelligent Algorithm-based [168,175] | Possesses learning and adaptability, suited for complex dynamic systems | Training requires large data, hard to guarantee optimality, prone to overfitting | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, T.; Zhang, Y.; Wang, M.; Feng, W.; Cao, S.; Wang, G. A Critical Review on the Battery System Reliability of Drone Systems. Drones 2025, 9, 539. https://doi.org/10.3390/drones9080539
Zhao T, Zhang Y, Wang M, Feng W, Cao S, Wang G. A Critical Review on the Battery System Reliability of Drone Systems. Drones. 2025; 9(8):539. https://doi.org/10.3390/drones9080539
Chicago/Turabian StyleZhao, Tianren, Yanhui Zhang, Minghao Wang, Wei Feng, Shengxian Cao, and Gong Wang. 2025. "A Critical Review on the Battery System Reliability of Drone Systems" Drones 9, no. 8: 539. https://doi.org/10.3390/drones9080539
APA StyleZhao, T., Zhang, Y., Wang, M., Feng, W., Cao, S., & Wang, G. (2025). A Critical Review on the Battery System Reliability of Drone Systems. Drones, 9(8), 539. https://doi.org/10.3390/drones9080539