
Systematic Review of Multi-Objective UAV Swarm Mission Planning Systems from Regulatory Perspective




Abstract
1. Introduction
2. Background
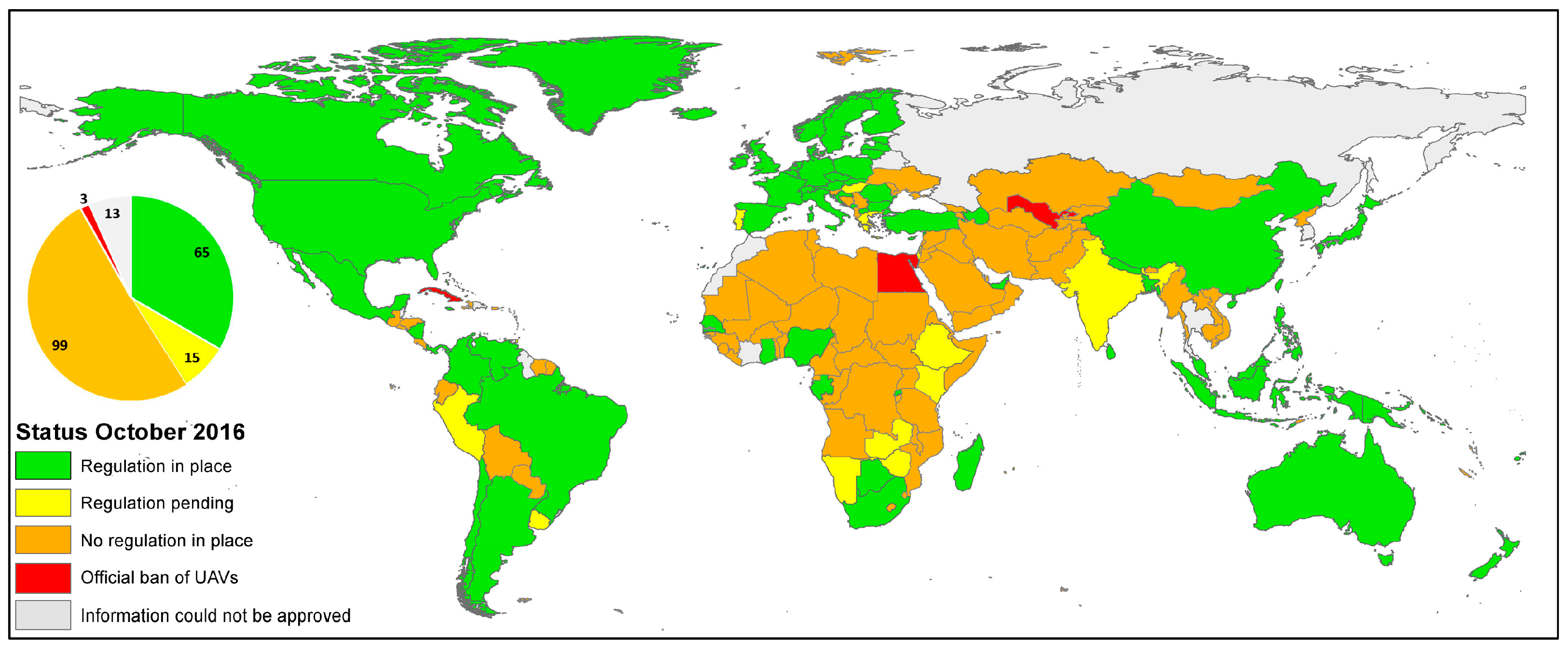
2.1. State of UAV Swarm Legislation
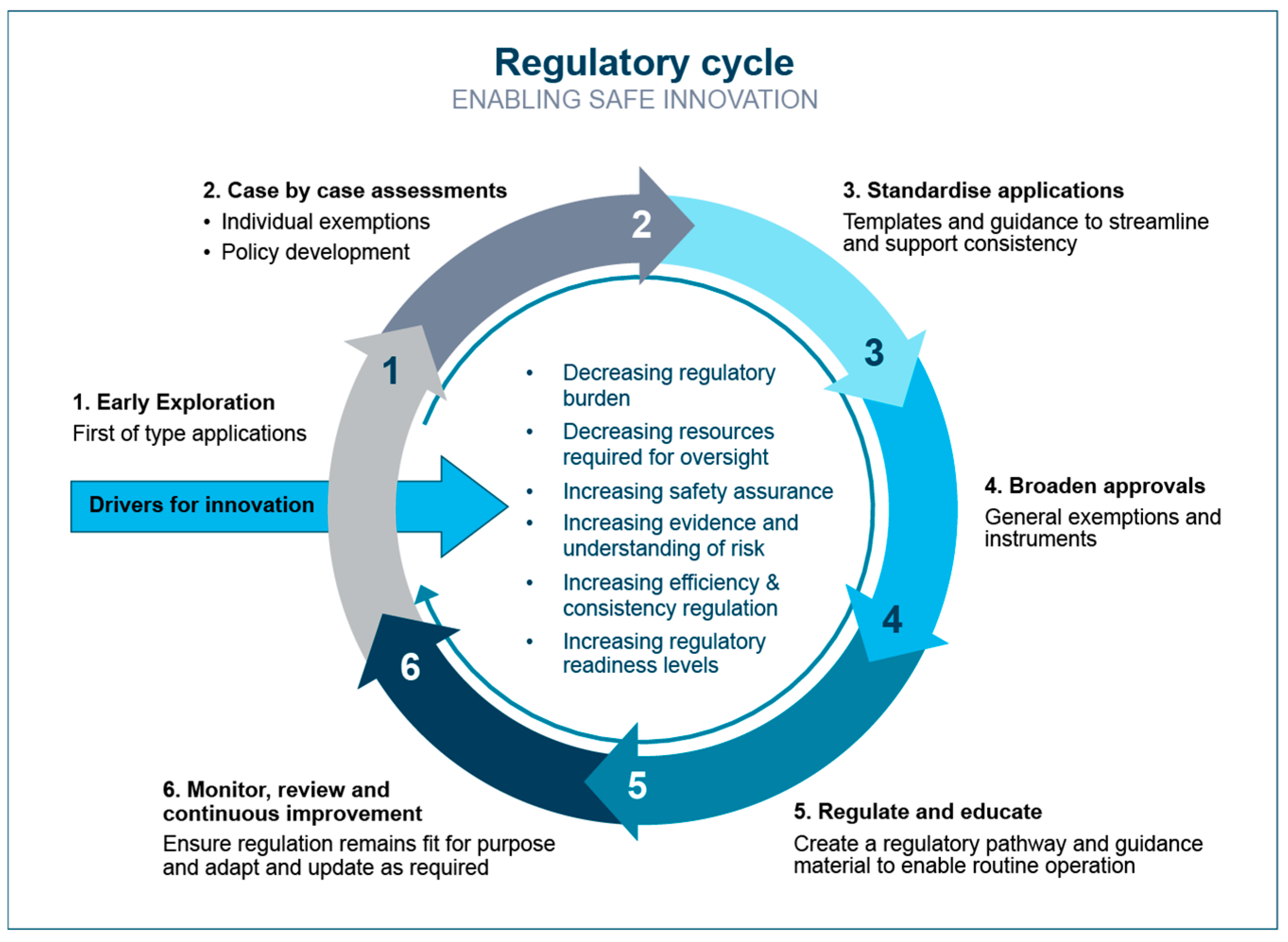
2.2. Australian Regulatory Enviroment
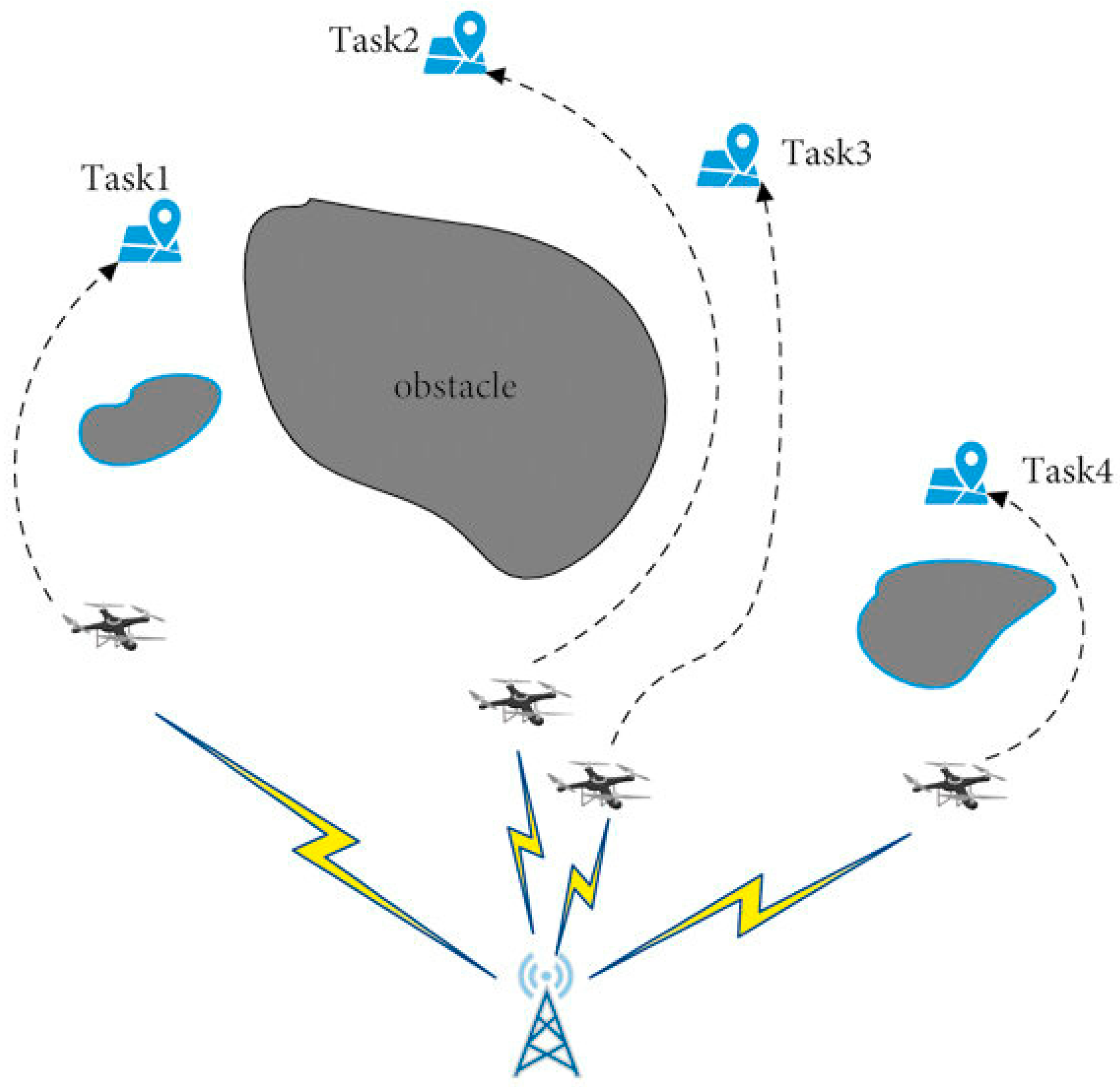
2.3. State of UAV Swarm Technology
3. Contributions
4. Method
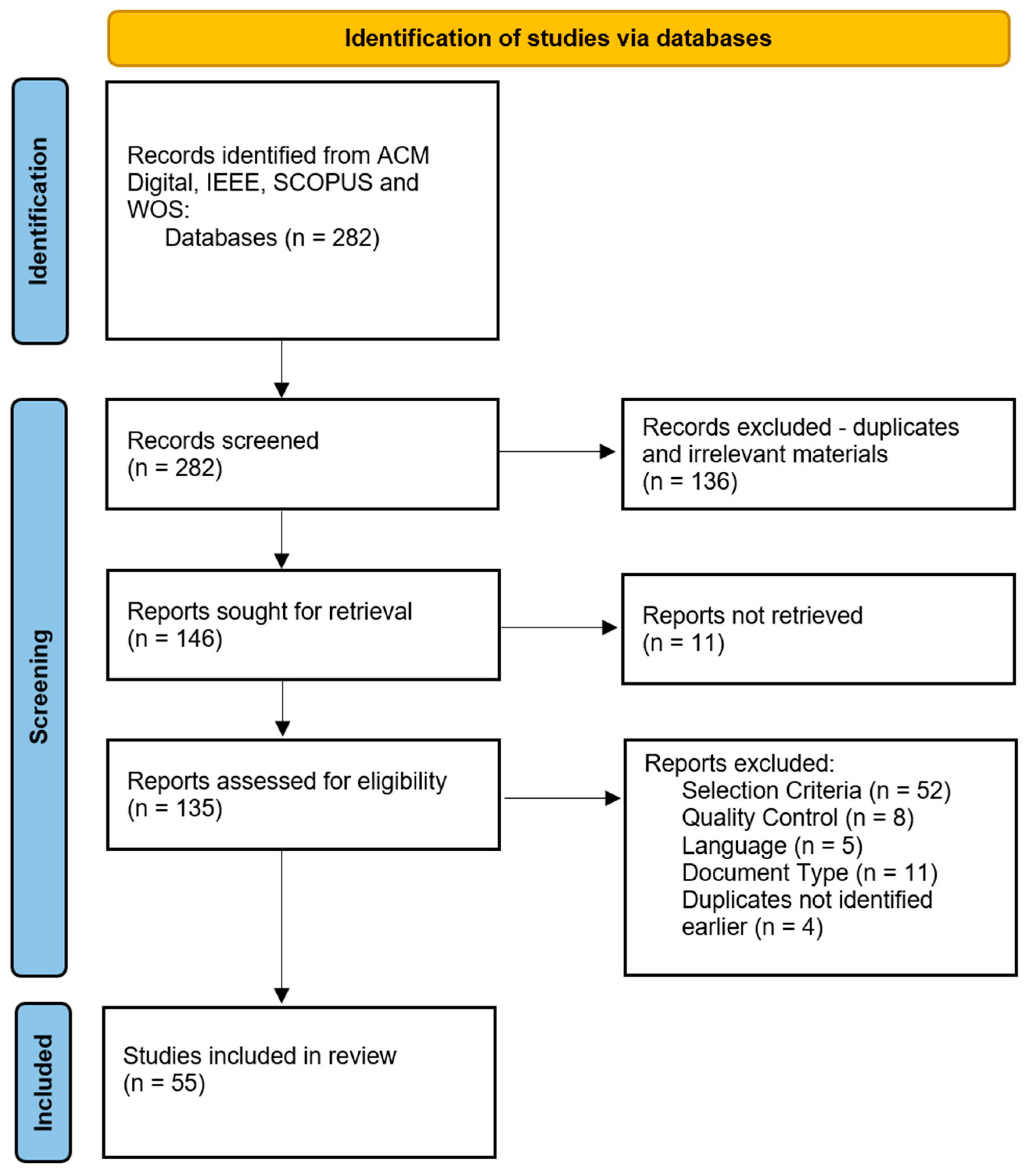
4.1. Article Selection
4.1.1. Selection Overview
4.1.2. Selection Criteria
4.1.3. Quality Assessment
4.2. Article Analysis
4.2.1. Criterion Overview
4.2.2. Criterion One—Instruction from Multiple External Observers
- 1A. This metric assessed the command architecture by qualitatively characterizing the control architecture used. One mark was awarded if a decentralized architecture was used during operation. That is, if a centralized method was used during swarm training, but a fully distributed architecture was used during operation, one mark would still be awarded. Half marks were awarded if the system demonstrated hierarchical control and zero marks awarded if the system relied on a central control node.
- 1B. This metric assessed operation context by qualitatively identifying whether online or offline control was used. One mark was awarded if an online task assignment method was used. Zero marks were awarded if an offline task assignment method was used, that is an omniscient knowledge of available tasks was required prior to mission commencement.
- 1C. This mark assessed task heterogeneity by classifying uniqueness of tasks considered during the task assignment process. If each task had more than one unique characteristic that directly influenced the applied task assignment algorithm one mark was awarded else, zero marks were awarded. For example, if tasks were defined to consist of a unique location and a unique name but the given names had no influence on task assignment then zero marks were given.
- 1D. This metric assessed swarm heterogeneity by classifying the uniqueness of individual UAV agents considered during the task assignment process. If the UAVs had more than one unique characteristic that directly influenced the applied task assignment algorithm, one mark was awarded else, zero marks were awarded.
4.2.3. Criterion Two—Dynamic No-Fly-Zone Support
- 2A. This metric assessed the obstacle types considered within the mission planning system using qualitative classification. One mark was awarded if dynamic obstacles were explicitly considered, i.e., obstacles in motion, not dynamic obstacle detection. Half marks were awarded if only static obstacles, static no-fly zones or only inter-drone collisions were considered. Zero marks were awarded if no avoidance method was included.
- 2B. This metric assessed how obstacles were handled within the command architecture by qualitative analyzing how the swarm stored obstacle information. One mark was awarded if the obstacle information was distributed amongst agents. A half mark was awarded if obstacle information was stored independently by each agent. Zero marks were awarded if the swarm relied on omniscient knowledge of obstacle locations or had no obstacle information (did not consider obstacle avoidance).
- 2C. This metric assessed obstacle detection by observing if an online method was used to locally detect new obstacles. This metric extended the investigation into the operation context characteristic, specifically focusing on obstacle information instead of task information. One mark was awarded if an online obstacle detection system was presented. Zero marks were awarded if no obstacle detection method was presented.
- 2D. This metric assessed obstacle submission by observing if a method was presented to accept new obstacle information from an external source. One mark was awarded if an online submission method was presented. Half a mark was awarded if an offline method was presented and zero marks were awarded if obstacle submission was not considered.
4.2.4. Criterion Three—Command and Control Link Loss Stability
- 3A. This metric assessed network constraints by analyzing three network performance metrics, bandwidth, latency and range. One mark was awarded if constrained definitions were provided to limit all three of these key network performance indicators. Constraints could either be imposed directly using numerical limits or indirectly through network component definition. Half marks were awarded if only subsets of the factors were constrained, and zero marks were awarded if none of the factors were considered.
- 3B. This metric assessed the networking method by qualitatively classifying the complexity of the method used. One mark was awarded if a specific networking structure was provided, this structure could relate to either inter-swarm or intra-swarm communication providing it handled the communications required for UAV tasking. Half marks were awarded if a numerical representation was used, i.e., graph structures or adjacency matrices. Zero marks were awarded if no discussion of the networking method was provided.
- 3C. This metric assessed communication failure detection by analyzing what possible failures had been acknowledged and if so, what methods had been proposed to detect the referenced failure types. One mark was awarded if one or more failures were considered and detection methods proposed. Half marks were awarded if failure cases had been acknowledged but not detection method was proposed. Zero marks were awarded if communication failure was not considered.
- 3D. This metric assessed failure mitigation by investigating if communication recovery or link loss damage mitigation method were proposed. One mark was awarded a mitigation method was implemented and its functionality demonstrated during algorithm validation. Half mark was awarded if a mitigation method was proposed by not implemented, or if speculation of possible mitigation methods was offered. Zero marks were awarded if no communication failure mitigation or recovery methods were not discussed.
4.2.5. Criterion Four—UAV Swarm Observability
- 4A. This metric assessed the evaluation method used to validate mission planning performance under standard operating conditions using a qualitive classification. One mark was awarded if a simulation environment was used to holistically validate swarm performance within a specific operating scenario. Half marks were awarded if numerical analysis was used to validate swarm optimality. Zero marks were awarded if either validation was not preformed or if the validation method was not detailed.
- 4B. This metric assessed the method used to generate or access swarm performance data during algorithm validation. One mark was awarded if the performance data was observed by the swarm’s mission planning system, and returned to the evaluation platform through a pre-defined data channel. Zero marks were awarded if an omniscient viewpoint was used to ascertain swarm performance data, that is, the validation environment directly accessed UAV location/task assignment information to evaluate swarm performance.
- 4C. This metric assessed the degree to which unsolicited events had been modeled within the mission planning evaluation process. One mark was awarded if swarm validation included unplanned failures such as task failure, communication failure or drone failure. Half marks were awarded if the validation environment allowed for online task or obstacle submission to the swarm. Zero marks were awarded if an offline validation approach was used.
- 4D. This metric assessed how performance/failure data associated with unsolicited events was handled. One mark was awarded if the mission planning system observed and generated failure data directly, relaying this information to environment for response evaluation. Zero marks were awarded if the swarm had no considerations for reporting unsolicited events, and as such, an omniscient viewpoint was used to validate the swarm’s response to said events.
5. Results
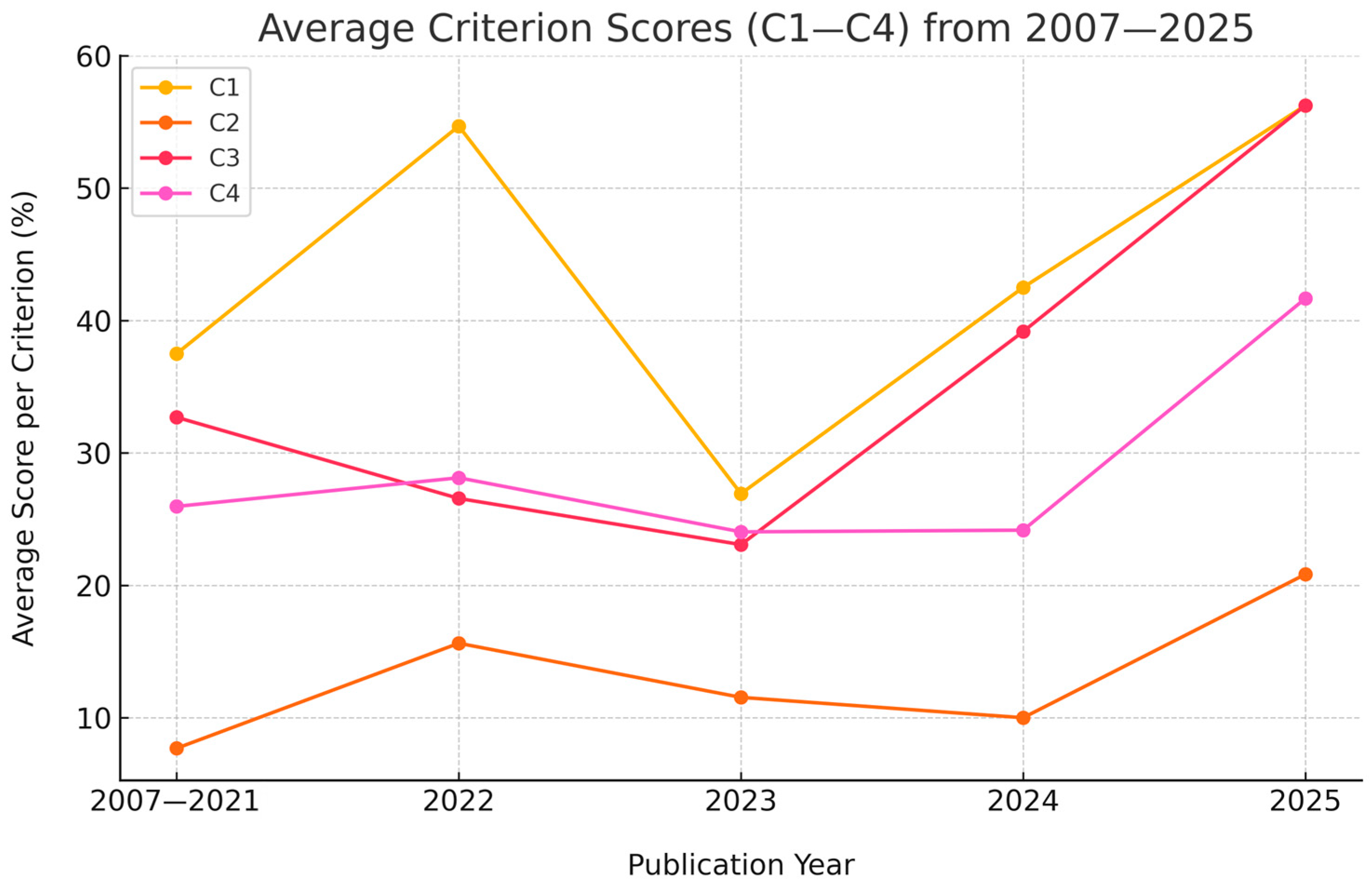
5.1. Summary of Findings
5.2. Article Results
6. Discussion
6.1. Criterion One Results
6.2. Criterion Two Results
6.3. Criterion Three Results
6.4. Criterion Four Results
7. Open Challenges and Enabling Technologies
7.1. Online Decentralized Heterogenous Multi-User Control
7.2. Intergration of Robust Path Planning into Multi-Objective Mission Planning Systems
7.3. Intergation of Robust Networking into Swarm Control Systems
7.4. Swarm Observability Support
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAV | Unmanned Aerial Vehicle |
| CASA | Civil Aviation Safety Authority |
| JARUS | Joint Authorities For Rulemaking on Unmanned Systems |
| SORA | Specific Operations Risk Assessment |
| FAA | Federal Aviation Administration |
| CAAC | Civil Aviation Administration of China |
| EASA | European Union Aviation Safety Agency |
| CONOPS | Concept of Operations |
| IEEE | Institute of Electrical and Electronics Engineers |
| BCIA | Bi-subpopulation Coevolutionary Immune Algorithm |
| TDC | Task Driven Clustering |
| MOPSO | Multi-Objective Particle Swarm Optimization |
| CNP | Contract Net Protocol |
| MT-MDP | Multi-task Markov Decision Process |
| RCEA | Region Co-Evolution Algorithm |
| GDMTD3 | Generative diffusion model-enabled twin delayed deep deterministic policy gradient |
| NSGA | Non-dominated Sorting Genetic Algorithm |
| DCTAEA | Dynamic Constrained Two-Archive Evolutionary Algorithm |
| CSS-MPCCC | Collaborative search scheme based on model predictive control and communication constraints |
| DDQN | Double Deep Q-Network |
| MORL | Multi-Objective Reinforcement Learning |
| MPMFG | Multi-Population Mean Field Game |
| DTFSSMFG | Discrete Time Finite State Space Mean Field Game |
| MOEA | Multi-Objective Evolutionary Algorithm |
| MPSO-SA-DQN | multi UAV task assignment method based on Deep Q-based evolutionary reinforcement learning algorithms |
| GA | Genetic Algorithm |
| MOALO-RSI | multi-objective ant-lion optimizer with random walk initialization |
| VNS | variable neighborhood search |
| MILP | mixed integer linear programming |
| IMOGOA | Improved multi-objective grasshopper algorithm |
| DCSDM | Distributed cooperative strike decision method |
| GMMAA | Global Multi-objective Multi-task Assignment Algorithm |
| IPSO | Improved Particle Swarm Optimization |
| DDPG | multi-agent deep reinforcement learning |
| IM-DPSO | Improved mixed discrete particle swarm optimization algorithm |
| DQN | Deep Q-Network |
| EMSSA | Multi-objective salp swarm algorithm |
| PTMA | probability-tuned market-based allocation |
| IGA | Improved Genetic Algorithm |
| DA-PSO | distributed auction particle swarm optimization |
| ILP | Integer Linear Programming |
| QLHH | Q-Learning Hyper-Heuristic |
| MILP | Mixed-Integer Linear Programing |
| IAGA | Improved adaptive genetic algorithm |
| MWPSO | Weighted Multi-Objective Particle Swarm Algorithm |
| GTO | Artificial Gorilla Troops Optimizer |
| BCI | Belief-Correlated Imitation |
| D-NSGA | Dynamic Non-dominated Sorting Genetic Algorithm |
| MOEA/D | multi-objective evolutionary algorithm based on decomposition |
| FCE | fuzzy comprehensive evaluation |
| k-PICEA-G | K-means clustering enhanced preference inspired co-evolutionary algorithm with goal vectors |
| DACLD | dynamic ant colony labor division |
Appendix A
Criterion One Results

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. Number | Pub. Year | 1A | 1B | 1C | 1D | Total |
|---|---|---|---|---|---|---|
| [79] | 2025 | 0 | 0 | 1 | 1 | 50% |
| [80] | 2025 | 0.5 | 1 | 1 | 1 | 87.5% |
| [81] | 2025 | 0.5 | 1 | 1 | 1 | 87.5% |
| [82] | 2025 | 0.5 | 1 | 0 | 0 | 37.5% |
| [83] | 2025 | 0 | 0 | 1 | 1 | 50% |
| [84] | 2025 | 0 | 1 | 0 | 0 | 25% |
| Ref. Number | Pub. Year | 1A | 1B | 1C | 1D | Total |
|---|---|---|---|---|---|---|
| [85] | 2024 | 0 | 0 | 0 | 1 | 25% |
| [86] | 2024 | 0 | 0 | 1 | 1 | 50% |
| [87] | 2024 | 0 | 1 | 0 | 0 | 25% |
| [88] | 2024 | 0 | 1 | 0 | 0 | 25% |
| [89] | 2024 | 1 | 1 | 0 | 0 | 50% |
| [90] | 2024 | 1 | 1 | 0 | 0 | 50% |
| [91] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [92] | 2024 | 0 | 0 | 1 | 1 | 50% |
| [93] | 2024 | 1 | 1 | 0 | 0 | 50% |
| [94] | 2024 | 1 | 1 | 1 | 0 | 75% |
| [95] | 2024 | 0 | 0 | 1 | 1 | 50% |
| [96] | 2024 | 0.5 | 1 | 1 | 1 | 87.5% |
| [97] | 2024 | 1 | 1 | 0 | 0 | 50% |
| [98] | 2024 | 1 | 0 | 0 | 0 | 25% |
| [99] | 2024 | 1 | 0 | 0 | 0 | 25% |
| Ref. Number | Pub. Year | 1A | 1B | 1C | 1D | Total |
|---|---|---|---|---|---|---|
| [100] | 2023 | 1 | 1 | 0 | 0 | 50% |
| [101] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [65] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [102] | 2023 | 1 | 1 | 0 | 0 | 50% |
| [103] | 2023 | 1 | 1 | 0 | 0 | 50% |
| [104] | 2023 | 0 | 0 | 0 | 1 | 25% |
| [105] | 2023 | 0 | 1 | 0 | 0 | 25% |
| [69] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [106] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [107] | 2023 | 1 | 1 | 0 | 0 | 50% |
| [68] | 2023 | 0 | 0 | 0 | 1 | 25% |
| [67] | 2023 | 1 | 1 | 0 | 0 | 50% |
| [108] | 2023 | 1 | 0 | 0 | 0 | 25% |
| Ref. Number | Pub. Year | 1A | 1B | 1C | 1D | Criterion 1 Total |
|---|---|---|---|---|---|---|
| [109] | 2022 | 1 | 0 | 1 | 1 | 75% |
| [64] | 2022 | 1 | 1 | 0 | 0 | 50% |
| [110] | 2022 | 0.5 | 1 | 0 | 1 | 62.5% |
| [111] | 2022 | 0 | 1 | 1 | 1 | 75% |
| [112] | 2022 | 1 | 1 | 0 | 0 | 50% |
| [113] | 2022 | 0 | 0 | 1 | 1 | 50% |
| [114] | 2022 | 0 | 0 | 0 | 1 | 25% |
| [115] | 2022 | 0 | 0 | 1 | 1 | 50% |
| [116] | 2021 | 1 | 0 | 0 | 0 | 25% |
| [117] | 2021 | 0 | 1 | 1 | 0 | 50% |
| [118] | 2021 | 0 | 0 | 0 | 0 | 0% |
| [66] | 2021 | 0 | 0 | 0 | 0 | 0% |
| [119] | 2021 | 0 | 0 | 1 | 1 | 50% |
| [120] | 2020 | 1 | 0 | 0 | 0 | 25% |
| [121] | 2020 | 0.5 | 0 | 1 | 1 | 62.5% |
| [122] | 2019 | 0.5 | 0 | 1 | 1 | 62.5% |
| [123] | 2018 | 0.5 | 0 | 1 | 1 | 62.5% |
| [124] | 2018 | 1 | 1 | 0 | 1 | 75% |
| [125] | 2018 | 0 | 0 | 1 | 1 | 50% |
| [126] | 2013 | 1 | 0 | 0 | 0 | 25% |
| [127] | 2007 | 0 | 0 | 0 | 0 | 0% |
Appendix B
Criterion Two Results
| Ref. Number | Pub. Year | 2A | 2B | 2C | 2D | Total |
|---|---|---|---|---|---|---|
| [79] | 2025 | 0 | 0 | 0 | 0 | 0% |
| [80] | 2025 | 0 | 0 | 0 | 0 | 0% |
| [81] | 2025 | 0.5 | 0 | 0 | 0.5 | 25% |
| [82] | 2025 | 1 | 1 | 1 | 0.5 | 87.5% |
| [83] | 2025 | 0.5 | 0 | 0 | 0 | 12.5% |
| [84] | 2025 | 0 | 0 | 0 | 0 | 0% |
| Ref. Number | Pub. Year | 2A | 2B | 2C | 2D | Total |
|---|---|---|---|---|---|---|
| [85] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [86] | 2024 | 0.5 | 0 | 0 | 0.5 | 25% |
| [87] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [88] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [89] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [90] | 2024 | 1 | 0.5 | 1 | 0.5 | 75% |
| [91] | 2024 | 0.5 | 0 | 0 | 0.5 | 25% |
| [92] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [93] | 2024 | 0.5 | 0 | 0 | 0.5 | 25% |
| [94] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [95] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [96] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [97] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [98] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [99] | 2024 | 0 | 0 | 0 | 0 | 0% |
| Ref. Number | Pub. Year | 2A | 2B | 2C | 2D | Total |
|---|---|---|---|---|---|---|
| [100] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [101] | 2023 | 0 | 0 | 0 | 0 | 25% |
| [65] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [102] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [103] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [104] | 2023 | 0 | 0 | 0 | 0 | 75% |
| [105] | 2023 | 0.5 | 1 | 0 | 0 | 25% |
| [69] | 2023 | 0.5 | 0 | 0 | 0.5 | 0% |
| [106] | 2023 | 0.5 | 1 | 0 | 0.5 | 25% |
| [107] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [68] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [67] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [108] | 2023 | 0 | 0 | 0 | 0 | 0% |
| Ref. Number | Pub. Year | 2A | 2B | 2C | 2D | Total |
|---|---|---|---|---|---|---|
| [109] | 2022 | 0 | 0 | 0 | 0 | 0% |
| [64] | 2022 | 0.5 | 0 | 0 | 0 | 12.5% |
| [110] | 2022 | 0.5 | 1 | 1 | 1 | 87.5% |
| [111] | 2022 | 0 | 0 | 0 | 0 | 0% |
| [112] | 2022 | 0 | 0 | 0 | 0 | 0% |
| [113] | 2022 | 0.5 | 0 | 0 | 0.5 | 25% |
| [114] | 2022 | 0 | 0 | 0 | 0 | 0% |
| [115] | 2022 | 0 | 0 | 0 | 0 | 0% |
| [116] | 2021 | 0.5 | 1 | 0 | 0 | 37.5% |
| [117] | 2021 | 0 | 0 | 0 | 0 | 0% |
| [118] | 2021 | 0.5 | 1 | 0 | 0 | 37.5% |
| [66] | 2021 | 0 | 0 | 0 | 0 | 0% |
| [119] | 2021 | 0 | 0 | 0 | 0 | 0% |
| [120] | 2020 | 0 | 0 | 0 | 0 | 0% |
| [121] | 2020 | 0 | 0 | 0 | 0 | 0% |
| [122] | 2018 | 0 | 0 | 0 | 0 | 0% |
| [123] | 2018 | 0 | 0 | 0 | 0 | 0% |
| [124] | 2018 | 0 | 0 | 0 | 0 | 0% |
| [125] | 2018 | 0 | 0 | 0 | 0 | 0% |
| [126] | 2013 | 0 | 0 | 0 | 0 | 0% |
| [127] | 2007 | 0.5 | 0 | 0 | 0.5 | 25% |
Appendix C
Criterion Three Results
| Ref. Number | Pub. Year | 3A | 3B | 3C | 3D | Total |
|---|---|---|---|---|---|---|
| [79] | 2025 | 0 | 0 | 0 | 0 | 0% |
| [80] | 2025 | 0.5 | 1 | 0.5 | 0.5 | 62.5% |
| [81] | 2025 | 0 | 1 | 0.5 | 0.5 | 50% |
| [82] | 2025 | 0 | 1 | 1 | 1 | 75% |
| [83] | 2025 | 0 | 1 | 1 | 1 | 75% |
| [84] | 2025 | 1 | 1 | 0.5 | 0.5 | 75% |
| Ref. Number | Pub. Year | 3A | 3B | 3C | 3D | Total |
|---|---|---|---|---|---|---|
| [85] | 2024 | 0.5 | 0 | 0 | 0 | 12.5% |
| [86] | 2024 | 0.5 | 0.5 | 0 | 0 | 25% |
| [87] | 2024 | 0 | 0 | 0.5 | 0.5 | 25% |
| [88] | 2024 | 0.5 | 1 | 0.5 | 0.5 | 62.5% |
| [89] | 2024 | 0 | 1 | 1 | 1 | 75% |
| [90] | 2024 | 0 | 0.5 | 0.5 | 1 | 50% |
| [91] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [92] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [93] | 2024 | 1 | 1 | 0.5 | 0.5 | 75% |
| [94] | 2024 | 0.5 | 0.5 | 0 | 0 | 25% |
| [95] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [96] | 2024 | 0.5 | 0.5 | 1 | 1 | 75% |
| [97] | 2024 | 0.5 | 1 | 1 | 0.5 | 75% |
| [98] | 2024 | 0 | 0 | 0 | 0 | 0% |
| [99] | 2024 | 0.5 | 1 | 1 | 1 | 87.5% |
| Ref. Number | Pub. Year | 3A | 3B | 3C | 3D | Total |
|---|---|---|---|---|---|---|
| [100] | 2023 | 0.5 | 1 | 0.5 | 0.5 | 62.5% |
| [101] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [65] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [102] | 2023 | 0.5 | 0 | 0 | 0 | 12.5% |
| [103] | 2023 | 1 | 1 | 0.5 | 0 | 62.5% |
| [104] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [105] | 2023 | 0.5 | 0 | 0 | 0 | 12.5% |
| [69] | 2023 | 0 | 0 | 0 | 0.5 | 12.5% |
| [106] | 2023 | 1 | 1 | 0 | 0.5 | 62.5% |
| [107] | 2023 | 0.5 | 0.5 | 0.5 | 1 | 62.5% |
| [68] | 2023 | 0 | 0 | 0 | 0 | 0% |
| [67] | 2023 | 0 | 0.5 | 0 | 0 | 12.5% |
| [108] | 2023 | 0 | 0 | 0 | 0 | 0% |
| Ref. Number | Pub. Year | 3A | 3B | 3C | 3D | Total |
|---|---|---|---|---|---|---|
| [109] | 2022 | 0.5 | 1 | 1 | 1 | 87.5% |
| [64] | 2022 | 0.5 | 0.5 | 0 | 0 | 25% |
| [110] | 2022 | 0.5 | 0.5 | 0 | 0 | 25% |
| [111] | 2022 | 0 | 0 | 0 | 0 | 0% |
| [112] | 2022 | 0.5 | 1 | 0.5 | 1 | 75% |
| [113] | 2022 | 0 | 0 | 0 | 0 | 0% |
| [114] | 2022 | 0 | 0 | 0 | 0 | 0% |
| [115] | 2022 | 0 | 0 | 0 | 0 | 0% |
| [116] | 2021 | 1 | 1 | 1 | 1 | 100% |
| [117] | 2021 | 0 | 0 | 0.5 | 0 | 12.5% |
| [118] | 2021 | 1 | 1 | 0 | 0 | 50% |
| [66] | 2021 | 0.5 | 1 | 0 | 0 | 37.5% |
| [119] | 2021 | 0.5 | 1 | 1 | 1 | 87.5% |
| [120] | 2020 | 0.5 | 1 | 0 | 0 | 37.5% |
| [121] | 2020 | 0.5 | 1 | 0 | 0.5 | 50% |
| [122] | 2018 | 0.5 | 0 | 0 | 0 | 12.5% |
| [123] | 2018 | 0 | 0 | 0 | 0 | 0% |
| [124] | 2018 | 0 | 0 | 0 | 0 | 0% |
| [125] | 2018 | 0.5 | 1 | 0 | 0 | 37.5% |
| [126] | 2013 | 0 | 0 | 0 | 0 | 0% |
| [127] | 2007 | 0 | 0 | 0 | 0 | 0% |
Appendix D
Criterion Four Results
| Ref. Number | Pub. Year | 4A | 4B | 4C | 4D | Total |
|---|---|---|---|---|---|---|
| [79] | 2025 | 0.5 | 0 | 0 | 0 | 12.5% |
| [80] | 2025 | 1 | 1 | 1 | 0 | 75% |
| [81] | 2025 | 0.5 | 0 | 0 | 0 | 12.5% |
| [82] | 2025 | 1 | 0 | 1 | 0 | 50% |
| [83] | 2025 | 1 | 1 | 1 | 0 | 75% |
| [84] | 2025 | 1 | 0 | 0 | 0 | 25% |
| Ref. Number | Pub. Year | 4A | 4B | 4C | 4D | Total |
|---|---|---|---|---|---|---|
| [85] | 2024 | 1 | 0 | 0 | 0 | 25% |
| [86] | 2024 | 1 | 0 | 0 | 0 | 25% |
| [87] | 2024 | 0.5 | 0 | 0 | 0 | 12.5% |
| [88] | 2024 | 0.5 | 0 | 0 | 0 | 12.5% |
| [89] | 2024 | 0.5 | 0 | 0 | 0 | 12.5% |
| [90] | 2024 | 1 | 1 | 0 | 0 | 50% |
| [91] | 2024 | 0.5 | 0 | 0 | 0 | 12.5% |
| [92] | 2024 | 0.5 | 0 | 0 | 0 | 12.5% |
| [93] | 2024 | 1 | 0 | 0 | 0 | 25% |
| [94] | 2024 | 1 | 0 | 0 | 0 | 25% |
| [95] | 2024 | 0.5 | 0 | 0 | 0 | 12.5% |
| [96] | 2024 | 1 | 0 | 1 | 1 | 75% |
| [97] | 2024 | 1 | 0 | 0 | 0 | 25% |
| [98] | 2024 | 0.5 | 0 | 0 | 0 | 12.5% |
| [99] | 2024 | 1 | 0 | 0 | 0 | 25% |
| Ref. Number | Pub. Year | 4A | 4B | 4C | 4D | Total |
|---|---|---|---|---|---|---|
| [100] | 2023 | 1 | 0 | 0 | 0 | 25% |
| [101] | 2023 | 1 | 0 | 0 | 0 | 25% |
| [65] | 2023 | 1 | 0 | 0 | 0 | 25% |
| [102] | 2023 | 1 | 0 | 0 | 0 | 25% |
| [103] | 2023 | 1 | 0 | 0 | 0 | 25% |
| [104] | 2023 | 1 | 0 | 0 | 0 | 25% |
| [105] | 2023 | 0.5 | 0 | 0 | 0 | 12.5% |
| [69] | 2023 | 1 | 0 | 0 | 0 | 25% |
| [106] | 2023 | 1 | 0 | 1 | 0 | 50% |
| [107] | 2023 | 1 | 0 | 0.5 | 0 | 37.5% |
| [68] | 2023 | 0.5 | 0 | 0 | 0 | 12.5% |
| [67] | 2023 | 0.5 | 0 | 0 | 0 | 12.5% |
| [108] | 2023 | 0.5 | 0 | 0 | 0 | 12.5% |
| Ref. Number | Pub. Year | 4A | 4B | 4C | 4D | Total |
|---|---|---|---|---|---|---|
| [109] | 2022 | 1 | 1 | 1 | 0.5 | 87.5% |
| [64] | 2022 | 0.5 | 0 | 0 | 0 | 12.5% |
| [110] | 2022 | 0.5 | 0 | 1 | 0 | 37.5% |
| [111] | 2022 | 0.5 | 0 | 0 | 0 | 12.5% |
| [112] | 2022 | 0.5 | 0 | 0 | 0 | 12.5% |
| [113] | 2022 | 1 | 0 | 0 | 0 | 25% |
| [114] | 2022 | 1 | 0 | 0 | 0 | 25% |
| [115] | 2022 | 0.5 | 0 | 0 | 0 | 12.5% |
| [116] | 2021 | 1 | 1 | 1 | 0 | 75% |
| [117] | 2021 | 1 | 1 | 1 | 0 | 75% |
| [118] | 2021 | 0.5 | 0 | 0 | 0 | 12.5% |
| [66] | 2021 | 1 | 0 | 0 | 0 | 25% |
| [119] | 2021 | 1 | 0 | 0 | 0 | 25% |
| [120] | 2020 | 1 | 0 | 0 | 0 | 25% |
| [121] | 2020 | 1 | 0 | 0 | 0 | 25% |
| [122] | 2018 | 0.5 | 0 | 0 | 0 | 12.5% |
| [123] | 2018 | 0.5 | 0 | 0 | 0 | 12.5% |
| [124] | 2018 | 0.5 | 0 | 0 | 0 | 12.5% |
| [125] | 2018 | 0.5 | 0 | 0 | 0 | 12.5% |
| [126] | 2013 | 0.5 | 0 | 0 | 0 | 12.5% |
| [127] | 2007 | 0.5 | 0 | 0 | 0 | 12.5% |
References
- Asaamoning, G.; Mendes, P.; Rosário, D.; Cerqueira, E. Drone Swarms as Networked Control Systems by Integration of Networking and Computing. Sensors 2021, 21, 2642. [Google Scholar] [CrossRef] [PubMed]
- Shakeri, R.; Al-Garadi, M.A.; Badawy, A.; Mohamed, A.; Khattab, T.; Al-Ali, A.K.; Harras, K.A.; Guizani, M. Design Challenges of Multi-UAV Systems in Cyber-Physical Applications: A Comprehensive Survey and Future Directions. IEEE Commun. Surv. Tutor. 2019, 21, 3340–3385. [Google Scholar] [CrossRef]
- Islam, N.; Rashid, M.M.; Pasandideh, F.; Ray, B.; Moore, S.; Kadel, R. A Review of Applications and Communication Technologies for Internet of Things (IoT) and Unmanned Aerial Vehicle (UAV) Based Sustainable Smart Farming. Sustainability 2021, 13, 1821. [Google Scholar] [CrossRef]
- Vanderhorst, H.R.; Suresh, S.; Renukappa, S. Systematic Literature Research of the Current Implementation of Unmanned Aerial System (UAS) in the Construction Industry. Int. J. Innov. Technol. Explor. Eng. 2019, 8, 416–428. [Google Scholar] [CrossRef]
- Turner, I.L.; Harley, M.D.; Drummond, C.D. UAVs for Coastal Surveying. Coast. Eng. 2016, 114, 19–24. [Google Scholar] [CrossRef]
- Roberts, J.; Frousheger, D.; Williams, B.; Campbell, D.; Walker, R. How the Outback Challenge Was Won: The Motivation for the UAV Challenge Outback Rescue, the Competition Mission, and a Summary of the Six Events. IEEE Robot. Autom. Mag. 2016, 23, 54–62. [Google Scholar] [CrossRef]
- Campion, M.; Ranganathan, P.; Faruque, S. UAV Swarm Communication and Control Architectures: A Review. J. Unmanned Veh. Syst. 2019, 7, 93–106. [Google Scholar] [CrossRef]
- ZHANG, J.; XING, J. Cooperative Task Assignment of Multi-UAV System. Chin. J. Aeronaut. 2020, 33, 2825–2827. [Google Scholar] [CrossRef]
- Zhou, Y.; Rao, B.; Wang, W. UAV Swarm Intelligence: Recent Advances and Future Trends. IEEE Access 2020, 8, 183856–183878. [Google Scholar] [CrossRef]
- Kar, A.K. Bio Inspired Computing—A Review of Algorithms and Scope of Applications. Expert Syst. Appl. 2016, 59, 20–32. [Google Scholar] [CrossRef]
- Alqefari, S.; Menai, M.E.B. Multi-UAV Task Assignment in Dynamic Environments: Current Trends and Future Directions. Drones 2025, 9, 75. [Google Scholar] [CrossRef]
- Huang, G.; Hu, M.; Yang, X.; Wang, X.; Wang, Y.; Huang, F. A Review of Constrained Multi-Objective Evolutionary Algorithm-Based Unmanned Aerial Vehicle Mission Planning: Key Techniques and Challenges. Drones 2024, 8, 316. [Google Scholar] [CrossRef]
- Muchiri, G.; Kimathi, S. A Review of Applications and Potential Applications of UAV. In Proceedings of the Sustainable Research and Innovation Conference, Pretoria, South Africa, 20–24 June 2022; pp. 280–283. [Google Scholar]
- Colomina, I.; Molina, P. Unmanned Aerial Systems for Photogrammetry and Remote Sensing: A Review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Hogan, W.; Harris, M.; Brock, A.; Rodwell, J. What Is Holding Back The Use of Drones for Medication Delivery in Rural Australia? Sustainability 2022, 14, 15778. [Google Scholar] [CrossRef]
- Yu, S.; Ranran, Y.; Nan, L. Critical Technologies for UAV Swarm Collaborative Mission Planning. Proceedings of 2023 11th China Conference on Command and Control, Beijing, China, 24–25 October 2023; Chinese Institute of Command and Control, Ed.; Springer Nature: Singapore, 2024; pp. 148–157. [Google Scholar] [CrossRef]
- Ramirez-Atencia, C.; Rodriguez-Fernandez, V.; Camacho, D. A Revision on Multi-Criteria Decision Making Methods for Multi-UAV Mission Planning Support. Expert Syst. Appl. 2020, 160, 113708. [Google Scholar] [CrossRef]
- Joint Authorities For Rulemaking on Unmanned Systems. Who Are We. Available online: http://jarus-rpas.org/about-us/who-we-are/ (accessed on 24 May 2025).
- Kim, D.H. Regulations and Laws Pertaining to the Use of Unmanned Aircraft Systems (UAS) by ICAO, USA, China, Japan, Australia, India, and Korea. In Unmanned Aerial Vehicles in Civilian Logistics and Supply Chain Management; IGI Global: Hershey, PA, USA, 2019; pp. 169–207. [Google Scholar] [CrossRef]
- Poudel, S.; Moh, S. Task Assignment Algorithms for Unmanned Aerial Vehicle Networks: A Comprehensive Survey. Veh. Commun. 2022, 35, 100469. [Google Scholar] [CrossRef]
- Heiets, I.; Kuo, Y.-W.; La, J.; Yeun, R.C.K.; Verhagen, W. Future Trends in UAV Applications in the Australian Market. Aerospace 2023, 10, 555. [Google Scholar] [CrossRef]
- Daly, A. Privacy in Automation: An Appraisal of the Emerging Australian Approach. Comput. Law Secur. Rev. 2017, 33, 836–846. [Google Scholar] [CrossRef]
- Hodgson, M.E.; Sella-Villa, D. State-Level Statutes Governing Unmanned Aerial Vehicle Use in Academic Research in the United States. Int. J. Remote Sens. 2021, 42, 5366–5395. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Civil Aviation Safety Authority. Manual of Standards. Available online: https://www.casa.gov.au/rules/regulatory-framework/manuals-standards (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Flight Approvals and Permissions. Available online: https://www.casa.gov.au/drones/flight-authorisations/flight-approvals-and-permissions (accessed on 23 May 2025).
- Tsiamis, N.; Efthymiou, L.; Tsagarakis, K.P. A Comparative Analysis of the Legislation Evolution for Drone Use in OECD Countries. Drones 2019, 3, 75. [Google Scholar] [CrossRef]
- Joint Authorities For Rulemaking on Unmanned Systems. About Us. Available online: http://jarus-rpas.org/about-us/ (accessed on 23 May 2025).
- Civil Aviation Safety Authority. About CASA. Available online: https://www.casa.gov.au/about-us/who-we-are/about-casa#Structure (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Specific Operations Risk Assessment. Available online: https://www.casa.gov.au/drones/flight-authorisations/beyond-visual-line-sight-operations/specific-operations-risk-assessment#WhoshoulduseSORA? (accessed on 23 May 2025).
- Asghari, O.; Ivaki, N.; Madeira, H. UAV Operations Safety Assessment: A Systematic Literature Review. ACM Comput. Surv. 2025, 57, 1–37. [Google Scholar] [CrossRef]
- Joint Authorities For Rulemaking on Unmanned Systems. Specific Operations Risk Assessment (SORA) Main Body. Available online: http://jarus-rpas.org/wp-content/uploads/2024/06/SORA-v2.5-Main-Body-Release-JAR_doc_25.pdf (accessed on 23 May 2025).
- Joint Authorities For Rulemaking on Unmanned Systems. UAS Operation Categorization. Available online: http://jarus-rpas.org/wp-content/uploads/2023/06/jar_10_doc_UAS_Operational_Cat.pdf (accessed on 23 May 2025).
- Joint Authorities For Rulemaking on Unmanned Systems. Specific Operations Risk Assessment (SORA) Annex A. Available online: http://jarus-rpas.org/wp-content/uploads/2023/10/jar_09_doc_JARUS_SORA_Annex_A_V1.0.pdf (accessed on 23 May 2025).
- Wiedemann, M.; Vij, A.; Banerjee, R. Validating the Benefits of Increased Drone Uptake for Australia: Geographic, Demographic and Social Insights; Analysis & Policy Observatory: Melbourne, Australia, 2023. [Google Scholar]
- Civil Aviation Safety Authority. Drones Taking Agriculture Sky High. Available online: https://www.casa.gov.au/about-us/news-media-releases-and-speeches/drones-taking-agriculture-sky-high (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Part 101 of CASR Unmanned Aircraft and Rockets. Available online: https://www.casa.gov.au/rules/regulatory-framework/casr/part-101-casr-unmanned-aircraft-and-rockets#Rulestatus (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Drone Safety Rules. Available online: https://www.casa.gov.au/drones/drone-rules/drone-safety-rules#Thedosanddon'tsofflying (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Remotely Piloted Aircraft (RPA) Flight Authorisation. Available online: https://www.casa.gov.au/sites/default/files/2021-03/application-rpa-flight-authorisation-area-approval-permission-form-101-09.pdf (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Flying Multiple Drones at Once. Available online: https://www.casa.gov.au/index.php/drones/flight-authorisations/flying-multiple-drones-once#Therequirements (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Regulatory Change. Available online: https://www.casa.gov.au/resources-and-education/publications-and-resources/corporate-publications/rpas-and-aam-strategic-regulatory-roadmap/themes#undefined (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Proposed Amendments to Part 101 CASR and MOS-Unmanned Aircraft and Rockets-(PP 2107US). Available online: https://consultation.casa.gov.au/regulatory-program/pp-2107us/consult_view/ (accessed on 23 May 2025).
- Civil Aviation Safety Authority. The RPAS and AAM Strategic Regulatory Roadmap. Available online: https://www.casa.gov.au/resources-and-education/publications-and-resources/corporate-publications/rpas-and-aam-strategic-regulatory-roadmap#Roadmapupdates (accessed on 23 May 2025).
- Civil Aviation Safety Authority. RPAS and AAM Roadmap Consultation. Available online: https://consultation.casa.gov.au/stakeholder-engagement-group/rpas-and-aam-roadmap-consultation/ (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Forward Regulatory Program. Available online: https://www.casa.gov.au/resources-and-education/publications-and-resources/corporate-publications/forward-regulatory-program#undefined (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Part 101 of CASR Unmanned Aircraft and Rockets Changes. Available online: https://www.casa.gov.au/rules/regulatory-framework/casr/part-101-casr-unmanned-aircraft-and-rockets/part-101-casr-unmanned-aircraft-and-rockets-changes (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Flight Operations Regulations Transition. Available online: https://www.casa.gov.au/rules/changing-rules/flight-operations-regulations-transition (accessed on 23 May 2025).
- Civil Aviation Safety Authority. Proposed Part 101 Standards and Guide for Authorised Beyond Visual Line of Sight, Outside of Controlled Airspace Operations (CD 2216US). Available online: https://consultation.casa.gov.au/regulatory-program/cd-2216us/ (accessed on 23 May 2025).
- Ouyang, Q.; Wu, Z.; Cong, Y.; Wang, Z. Formation Control of Unmanned Aerial Vehicle Swarms: A Comprehensive Review. Asian J. Control 2023, 25, 570–593. [Google Scholar] [CrossRef]
- Tang, J.; Duan, H.; Lao, S. Swarm Intelligence Algorithms for Multiple Unmanned Aerial Vehicles Collaboration: A Comprehensive Review. Artif. Intell. Rev. 2023, 56, 4295–4327. [Google Scholar] [CrossRef]
- Song, J.; Zhao, K.; Liu, Y. Survey on Mission Planning of Multiple Unmanned Aerial Vehicles. Aerospace 2023, 10, 208. [Google Scholar] [CrossRef]
- Wang, X.; Wang, H.; Zhang, H.; Wang, M.; Wang, L.; Cui, K.; Lu, C.; Ding, Y. A Mini Review on UAV Mission Planning. J. Ind. Manag. Optim. 2023, 19, 3362–3382. [Google Scholar] [CrossRef]
- Javaid, S.; Saeed, N.; Qadir, Z.; Fahim, H.; He, B.; Song, H.; Bilal, M. Communication and Control in Collaborative UAVs: Recent Advances and Future Trends. IEEE Trans. Intell. Transp. Syst. 2023, 24, 5719–5739. [Google Scholar] [CrossRef]
- Abdelkader, M.; Güler, S.; Jaleel, H.; Shamma, J.S. Aerial Swarms: Recent Applications and Challenges. Curr. Robot. Rep. 2021, 2, 309–320. [Google Scholar] [CrossRef] [PubMed]
- Campion, M.; Ranganathan, P.; Faruque, S. A Review and Future Directions of UAV Swarm Communication Architectures. In Proceedings of the 2018 IEEE International Conference on Electro/Information Technology, Rochester, MI, USA, 3–5 May 2018. [Google Scholar]
- Almadhoun, R.; Taha, T.; Seneviratne, L.; Zweiri, Y. A Survey on Multi-Robot Coverage Path Planning for Model Reconstruction and Mapping. SN Appl. Sci. 2019, 1, 847. [Google Scholar] [CrossRef]
- Zaitseva, E.; Levashenko, V.; Mukhamediev, R.; Brinzei, N.; Kovalenko, A.; Symagulov, A. Review of Reliability Assessment Methods of Drone Swarm (Fleet) and a New Importance Evaluation Based Method of Drone Swarm Structure Analysis. Mathematics 2023, 11, 2551. [Google Scholar] [CrossRef]
- Henchey, M.; Rosen, S. Emerging Approaches to Support Dynamic Mission Planning: Survey and Recommendations for Future Research. J. Def. Model. Simul. 2021, 18, 453–468. [Google Scholar] [CrossRef]
- Izhboldina, V.; Lebedev, I. Group Movement of UAVs in Environment with Dynamic Obstacles: A Survey. Int. J. Intell. Unmanned Syst. 2023, 11, 268–284. [Google Scholar] [CrossRef]
- Chung, S.-J.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A Survey on Aerial Swarm Robotics. IEEE Trans. Robot. 2018, 34, 837–855. [Google Scholar] [CrossRef]
- Zhao, X.; Jiang, H.; An, C.; Wu, R.; Guo, Y.; Yang, D. A Method of Multi-UAV Cooperative Task Assignment Based on Reinforcement Learning. Mob. Inf. Syst. 2022, 2022, 1147819. [Google Scholar] [CrossRef]
- Xu, X.P.; Yan, X.T.; Yang, W.Y.; An, K.; Huang, W.; Wang, Y. Algorithms and Applications of Intelligent Swarm Cooperative Control: A Comprehensive Survey. Prog. Aerosp. Sci. 2022, 135, 100869. [Google Scholar] [CrossRef]
- Corner, J.J.; Lamont, G.B. Parallel Simulation of UAV Swarm Scenarios. In Proceedings of the 2004 Winter Simulation Conference, Washington, DC, USA, 5–8 December; 2004; Volume 1, p. 363. [Google Scholar] [CrossRef]
- Duflo, G.; Danoy, G.; Talbi, E.-G.; Bouvry, P. A Generative Hyper-Heuristic Based on Multi-Objective Reinforcement Learning: The UAV Swarm Use Case. In Proceedings of the 2022 IEEE Congress on Evolutionary Computation (CEC), Padua, Italy, 18–23 July 2022; pp. 1–8. [Google Scholar] [CrossRef]
- Zhong, Y.; Ye, S.; Liu, Y.; Li, J. A Route Planning Method for UAV Swarm Inspection of Roads Fusing Distributed Droneport Site Selection. Sensors 2023, 23, 8479. [Google Scholar] [CrossRef] [PubMed]
- Lu, S.; Zhang, X.; Zhou, Y.; Sun, S. MOEA/D Based UAV Swarm Deployment for Wireless Coverage. In Proceedings of the2021 13th International Conference on Advanced Computational Intelligence (ICACI), Wanzhou, China, 14–16 May 2021; pp. 100–106. [Google Scholar] [CrossRef]
- Rong, L.; Ziyang, Z.; Liang, L.; Jiafeng, L. Research on Real-Time Target Assignment of UAV Swarm Based on DA-PSO Algorithm. Proceedings of 2021 5th Chinese Conference on Swarm Intelligence and Cooperative Control, Shenzhen, China, 19–22 November 2021; Ren, Z., Wang, M., Hua, Y., Eds.; Springer Nature: Singapore, 2023; pp. 1740–1749. [Google Scholar] [CrossRef]
- Chen, L.; Song, D.; Zhang, S. Research on Multi UAVS Task Allocation Method for Post Disaster Emergency Goods Distribution. J. Phys. Conf. Ser. 2023, 2607, 012009. [Google Scholar] [CrossRef]
- Yu, S.; Dingcheng, D. Multi-Objective Mission Planning for UAV Swarm Based on Deep Reinforcement Learning. In Proceedings of the 2023 IEEE International Conference on Unmanned Systems (ICUS), Hefei, China, 13–15 October 2023; pp. 1–10. [Google Scholar] [CrossRef]
- Kumar, P.A.; Manoj, N.; Sudheer, N.; Bhat, P.P.; Arya, A.; Sharma, R. UAV Swarm Objectives: A Critical Analysis and Comprehensive Review. SN Comput. Sci. 2024, 5, 764. [Google Scholar] [CrossRef]
- Ming, R.; Jiang, R.; Luo, H.; Lai, T.; Guo, E.; Zhou, Z. Comparative Analysis of Different UAV Swarm Control Methods on Unmanned Farms. Agronomy 2023, 13, 2499. [Google Scholar] [CrossRef]
- Fernando, N.; McMeekin, D.A.; Murray, I. Route Planning Methods in Indoor Navigation Tools for Vision Impaired Persons: A Systematic Review. Disabil. Rehabil. Assist. Technol. 2023, 18, 763–782. [Google Scholar] [CrossRef] [PubMed]
- Kmet, L.M.; Cook, L.S.; Lee, R.C. Standard Quality Assessment Criteria for Evaluating Primary Research Papers from a Variety of Fields; Alberta Heritage Foundation for Medical Research (AHFMR): Edmonton, AB, Canada, 2004. [Google Scholar] [CrossRef]
- Kitchenham, B.; Charters, S. Guidelines for Performing Systematic Literature Reviews in Software Engineering; Elsevier: Amsterdam, The Netherlands, 2007. [Google Scholar]
- Kumar, K.; Kumar, N. Region Coverage-Aware Path Planning for Unmanned Aerial Vehicles: A Systematic Review. Phys. Commun. 2023, 59, 102073. [Google Scholar] [CrossRef]
- Alqudsi, Y.; Makaraci, M. UAV Swarms: Research, Challenges, and Future Directions. J. Eng. Appl. Sci. 2025, 72, 12. [Google Scholar] [CrossRef]
- Phadke, A.; Medrano, F.A. Towards Resilient UAV Swarms—A Breakdown of Resiliency Requirements in UAV Swarms. Drones 2022, 6, 340. [Google Scholar] [CrossRef]
- Huttner, J.-P.; Friedrich, M. Current Challenges in Mission Planning Systems for UAVs: A Systematic Review. In Proceedings of the 2023 Integrated Communication, Navigation and Surveillance Conference (ICNS), Herndon, VA, USA, 18–20 April 2023; pp. 1–7. [Google Scholar] [CrossRef]
- Chen, X.; Wan, Y.; Qi, J.; Zhao, Z.; Ruan, Y.; Tang, J. A Bi-Subpopulation Coevolutionary Immune Algorithm for Multi-Objective Combinatorial Optimization in Multi-UAV Task Allocation. Complex Intell. Syst. 2025, 11, 149. [Google Scholar] [CrossRef]
- Chen, S.; Jiang, B.; Xu, H.; Pang, T.; Gao, M.; Liu, Z. A Task-Driven Scheme for Forming Clustering-Structure-Based Heterogeneous FANETs. Veh. Commun. 2025, 52, 100884. [Google Scholar] [CrossRef]
- Luo, Y.; Jiang, X.; Zhong, S.; Ji, Y. Air-to-Ground Reconnaissance-Attack Task Allocation for Heterogeneous UAV Swarm. J. Syst. Eng. Electron. 2025, 36, 155–175. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, Y.; Sun, C. End-to-End Multi-Task Reinforcement Learning-Based UAV Swarm Communication Attack Detection and Area Coverage. Knowl.-Based Syst. 2025, 316, 113390. [Google Scholar] [CrossRef]
- Sun, L.; Wang, J.; Wan, L.; Li, K.; Wang, X.; Lin, Y. Human-UAV Interaction Assisted Heterogeneous UAV Swarm Scheduling for Target Searching in Communication Denial Environment. IEEE Trans. Autom. Sci. Eng. 2025, 22, 4457–4472. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, G.; Li, J.; Wu, Q.; Wang, J.; Niyato, D.; Liu, Y. Multi-Objective Aerial Collaborative Secure Communication Optimization via Generative Diffusion Model-Enabled Deep Reinforcement Learning. IEEE Trans. Mob. Comput. 2025, 24, 3041–3058. [Google Scholar] [CrossRef]
- Quan, W.; Chen, C.; Zhang, Y. A Modified NSGA-II Algorithm for Solving Simulation-Based Bi-Objective System Effectiveness Optimization of UAV Swarm. In Proceedings of the 2024 14th Asian Control Conference (ASCC), Dalian, China, 5–8 July 2024; pp. 2389–2395. [Google Scholar]
- Dong, Y.; Li, Z.; Zhang, R.; Huang, R.; Wang, T. A Scenario Model-Driven Task Planning Method for Unmanned Aerial Vehicle Swarm. In Proceedings of the 15th Asia-Pacific Symposium on Internetware, Internetware’24, Macau, China, 24–26 July 2024; Association for Computing Machinery: New York, NY, USA, 2024; pp. 179–188. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, J.; Su, T.; Ding, M.; Liu, H. An Effective Dynamic Constrained Two-Archive Evolutionary Algorithm for Cooperative Search-Track Mission Planning by UAV Swarms in Air Intelligent Transportation. IEEE Trans. Intell. Transp. Syst. 2024, 25, 944–958. [Google Scholar] [CrossRef]
- Xu, S.; Zhou, Z.; Li, J.; Wang, L.; Zhang, X.; Gao, H. Communication-Constrained UAVs’ Coverage Search Method in Uncertain Scenarios. IEEE Sens. J. 2024, 24, 17092–17101. [Google Scholar] [CrossRef]
- Ozturk, H.B.; Ozturk, U.; Yavas, N.B.; Bingul, Z. Development of Optimal Task Allocation Algorithm for Unmanned Aerial Vehicle Swarms. In Proceedings of the Cognitive Models and Artificial Intelligence Conference, AICCONF’24, Istanbul, Turkiye, 25–26 May 2024; Association for Computing Machinery: New York, NY, USA, 2024; pp. 341–348. [Google Scholar] [CrossRef]
- Christal Jebi, R.; Baulkani, S.; Femila, L. Hybrid Energy-Efficient Distributed Aided Frog Leaping Dynamic A* with Reinforcement Learning for Enhanced Trajectory Planning in UAV Swarms Large-Scale Networks. Concurr. Comput. Pract. Exp. 2024, 36, e8237. [Google Scholar] [CrossRef]
- Niu, Z.; Yao, W.; Jin, Y.; Huang, S.; Zhang, X.; Qian, L. Integrated Task Assignment and Trajectory Planning for a Massive Number of Agents Based on Bilayer-Coupled Mean Field Games. IEEE Trans. Autom. Sci. Eng. 2024, 22, 1833–1852. [Google Scholar] [CrossRef]
- Manaswitha, K.; Issac, T.; Silas, S.; Terance, J.S. Investigation of Red Fox Algorithm for Solving Task Assignment Problem in Heterogeneous Unmanned Aerial Vehicle Swarm. In Proceedings of the 2024 3rd International Conference on Artificial Intelligence for Internet of Things (AIIoT), Vellore, India, 3–4 May 2024; pp. 1–5. [Google Scholar] [CrossRef]
- Lopez-Cueva, M.; Apaza-Cutipa, R.; Araujo-Cotacallpa, R.L.; Sasank, V.; Rangasamy, R.; Sengan, S. A Multi Moving Target Localization in Agricultural Farmlands by Employing Optimized Cooperative Unmanned Aerial Vehicle Swarm. Scalable Comput. Pract. Exp. 2024, 25, 4647–4660. [Google Scholar] [CrossRef]
- Pengfei, P.; Xue, G.; Yalian, Z. Multi-UAVs Task Allocation Method Based on MPSO-SA-DQN. Meas. Control 2024, 1–16. [Google Scholar] [CrossRef]
- Li, Z. Research on Real-Time Endurance of Drone Swarms for Express Delivery Dispatch. In Proceedings of the 2024 3rd International Conference on Cyber Security, Artificial Intelligence and Digital Economy, CSAIDE’24; Association for Computing Machinery: New York, NY, USA, 2024; pp. 639–642. [Google Scholar] [CrossRef]
- Li, Y.; Gao, A.; Wen, D.; Li, H.; Li, L. Research on the Resilient Planning Model of Multiple Task Chains in UAV Combat Networks. Frankl. Open 2024, 6, 100079. [Google Scholar] [CrossRef]
- Li, J.; Sun, G.; Wu, Q.; Liang, S.; Wang, P.; Niyato, D. Two-Way Aerial Secure Communications via Distributed Collaborative Beamforming under Eavesdropper Collusion. In Proceedings of the IEEE INFOCOM 2024-IEEE Conference on Computer Communications, Vancouver, BC, Canada, 20–23 May 2024; pp. 331–340. [Google Scholar] [CrossRef]
- Chen, Z.; Hu, Z.; Bao, Z.; Xu, W. UAV Charging Station Planning and Route Optimization Considering Stochastic Delivery Demand. IEEE Trans. Transp. Electrif. 2024, 10, 9328–9341. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, G.; Wu, Q.; Li, J.; Liang, S.; Niyato, D.; Leung, V.C.M. UAV Swarm-Enabled Collaborative Secure Relay Communications With Time-Domain Colluding Eavesdropper. IEEE Trans. Mob. Comput. 2024, 23, 8601–8619. [Google Scholar] [CrossRef]
- Su, W.; Gao, M.; Gao, X.; Xuan, Z. A Decision-Making Method for Distributed Unmanned Aerial Vehicle Swarm Considering Attack Constraints in the Cooperative Strike Phase. Int. J. Aerosp. Eng. 2023, 2023, 6568359. [Google Scholar] [CrossRef]
- Ding, R.; Zhu, Y.; Feng, X.; Chai, B.; Ji, R. A Multi-Objective Assignment Algorithm for UAVs in Multiple Task with Different Workloads. In Proceedings of the 2023 Asia-Pacific Conference on Image Processing, Electronics and Computers (IPEC), Dalian, China, 14–16 April 2023; pp. 354–359. [Google Scholar] [CrossRef]
- Li, B.; Ji, X.; Huang, Y. Cooperative Optimization Method of UAV Swarm for Multi-Objective High-Precision Location. Proceedings of 2021 5th Chinese Conference on Swarm Intelligence and Cooperative Control, Shenzhen, China, 19–22 November 2021; Ren, Z., Wang, M., Hua, Y., Eds.; Springer Nature: Singapore, 2023; pp. 1672–1683. [Google Scholar]
- Sun, W.; Bai, Z.; Shi, J.; Li, Z. DDPG-Based Multi-UAV Trajectory Optimization for WSN’s Data Collection. In Proceedings of the 2023 IEEE 11th International Conference on Information, Communication and Networks (ICICN), Xi’an, China, 17–20 August 2023; pp. 241–247. [Google Scholar] [CrossRef]
- Jia, Z.; Xiao, B.; Qian, H. Improved Mixed Discrete Particle Swarms Based Multi-Task Assignment for UAVs. In Proceedings of the 2023 IEEE 12th Data Driven Control and Learning Systems Conference (DDCLS), Xiangtan, China, 12–14 May 2023; pp. 442–448. [Google Scholar] [CrossRef]
- Yue, L.; Lv, M.; Yan, M.; Zhao, X.; Wu, A.; Li, L.; Zuo, J. Improving Cooperative Multi-Target Tracking Control for UAV Swarm Using Multi-Agent Reinforcement Learning. In Proceedings of the 2023 9th International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 21–23 April 2023; pp. 179–186. [Google Scholar] [CrossRef]
- Li, J.; Sun, G.; Duan, L.; Wu, Q. Multi-Objective Optimization for UAV Swarm-Assisted IoT With Virtual Antenna Arrays. IEEE Trans. Mob. Comput. 2023, 23, 4890–4907. [Google Scholar] [CrossRef]
- Xiong, J.; Li, J.; Li, J.; Kang, S.; Liu, C.; Yang, C. Probability-Tuned Market-Based Allocations for UAV Swarms Under Unreliable Observations. IEEE Trans. Cybern. 2023, 53, 6803–6814. [Google Scholar] [CrossRef] [PubMed]
- Mirza, I.S.; Shah, S.; Siddiqi, M.Z.; Wuttisittikukij, L.; Sasithong, P. Task Assignment and Path Planning of Multiple Unmanned Aerial Vehicles Using Integer Linear Programming. In Proceedings of the TENCON 2023-2023 IEEE Region 10 Conference (TENCON), Chiang Mai, Thailand, 31 October–3 November 2023; pp. 547–551. [Google Scholar] [CrossRef]
- Li, J.; Chen, R. A Distributed Task Scheduling Method Based on Conflict Prediction for Ad Hoc UAV Swarms. Drones 2022, 6, 356. [Google Scholar] [CrossRef]
- Qin, B.; Zhang, D.; Tang, S.; Wang, M. Distributed Grouping Cooperative Dynamic Task Assignment Method of UAV Swarm. Appl. Sci. 2022, 12, 2865. [Google Scholar] [CrossRef]
- Wang, Z.; Zhao, J.; Deng, H.; Xing, C.; Gao, T. Heterogeneous Multi-UAV Multi-Task Reallocation Problem Using Mixed-Integer Linear Programing. Proceedings of 2021 International Conference on Autonomous Unmanned Systems (ICAUS 2021), Changsha, China, 24–26 September 2021; Wu, M., Niu, Y., Gu, M., Cheng, J., Eds.; Springer: Singapore, 2022; pp. 3453–3459. [Google Scholar] [CrossRef]
- Duan, T.; Huang, M.; Wang, W.; Li, X.; Wang, T.; Li, B. Multi-Objective Optimization and Multi-Attribute Decision Making Method of UAV Swarm Based on Elastic Network. Proceedings of 2021 International Conference on Autonomous Unmanned Systems (ICAUS 2021), Changsha, China, 24–26 September 2021; Wu, M., Niu, Y., Gu, M., Cheng, J., Eds.; Springer: Singapore, 2022; pp. 1409–1426. [Google Scholar] [CrossRef]
- Shi, Z.; Zhang, T. The UAV Swarm Mission Planning Based on Adaptive Genetic Algorithm. In Proceedings of the 2022 IEEE International Conference on Unmanned Systems (ICUS), Guangzhou, China, 28–30 October 2022; pp. 1616–1620. [Google Scholar] [CrossRef]
- Luo, G.; Cao, A.; Wang, S.; Zhu, Y. UA V Swarm Scheduling Based on Weighted Multi-Objective Particle Swarm Algorithm. In Proceedings of the 2022 7th International Conference on Communication, Image and Signal Processing (CCISP), Chengdu, China, 18–20 November 2022; pp. 446–451. [Google Scholar] [CrossRef]
- Zhang, R.; Ren, H.; Li, X.; Ding, Y. UAV Swarm Task Assignment Method Based on Artificial Gorilla Troops Optimizer. In Proceedings of the 2022 IEEE International Conference on Unmanned Systems (ICUS), Guangzhou, China, 28–30 October 2022; pp. 529–536. [Google Scholar] [CrossRef]
- Yang, B.; Ma, C.; Xia, X. Drone Formation Control via Belief-Correlated Imitation Learning. In Proceedings of the 20th International Conference on Autonomous Agents and MultiAgent Systems, Online, 3–7 May 2021; pp. 1407–1415. [Google Scholar]
- Zhou, J.; Zhao, X.; Xu, Z.; Peng, S.; Lin, Z. Dynamic Task Allocation Algorithm Based on D-NSGA3. In Proceedings of the 2021 2nd International Conference on Control, Robotics and Intelligent System, CCRIS’21, Qingdao, China, 20–22 August 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 169–175. [Google Scholar] [CrossRef]
- Yang, Y.-Q.; Xia, Z.; Zhao, Z.; Zhang, T.; Li, K.; Yin, X.; Shi, H.; Peng, T. Intelligent Resource Management and Optimization of Clustered UAV Airborne SAR System. In Proceedings of the 2021 IEEE 4th International Conference on Electronics Technology (ICET), Chengdu, China, 7–10 May 2021; pp. 987–991. [Google Scholar] [CrossRef]
- Wang, X.; Zhang, Y.; Wang, L.; Lu, D.; Sun, Y.; Yao, J.; Ma, T.; Wang, X. Task Decision-Making for UAV Swarms Based on Robustness Evaluation. In Proceedings of the 2019 IEEE 19th International Conference on Software Quality, Reliability and Security Companion (QRS-C), Sofia, Bulgaria, 22–26 July 2019; pp. 242–248. [Google Scholar] [CrossRef]
- Duflo, G.; Danoy, G.; Talbi, E.-G.; Bouvry, P. Automating the Design of Efficient Distributed Behaviours for a Swarm of UAVs. In Proceedings of the 2020 IEEE Symposium Series on Computational Intelligence (SSCI), Canberra, Australia, 1–4 December 2020; pp. 489–496. [Google Scholar] [CrossRef]
- Luan, H.; Xu, Y.; Liu, D.; Du, Z.; Qian, H.; Liu, X.; Tong, X. Energy Efficient Task Cooperation for Multi-UAV Networks: A Coalition Formation Game Approach. IEEE Access 2020, 8, 149372–149384. [Google Scholar] [CrossRef]
- Li, J.; Yao, Y.; Yang, G.; Zhou, X. Resource Planning for UAV Swarms Based on NSGA-II. In Intelligent Robotics and Applications; Yu, H., Liu, J., Liu, L., Ju, Z., Liu, Y., Zhou, D., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 559–568. [Google Scholar] [CrossRef]
- Liu, J.; Wang, W.; Wang, T.; Shu, Z.; Li, X. A Motif-Based Rescue Mission Planning Method for UAV Swarms Usingan Improved PICEA. IEEE Access 2018, 6, 40778–40791. [Google Scholar] [CrossRef]
- Wu, H.; Li, H.; Xiao, R.; Liu, J. Modeling and Simulation of Dynamic Ant Colony’s Labor Division for Task Allocation of UAV Swarm. Phys. A Stat. Mech. Its Appl. 2018, 491, 127–141. [Google Scholar] [CrossRef]
- Liu, J.; Wang, W.; Li, X.; Wang, T.; Bai, S.; Wang, Y. Solving a Multi-Objective Mission Planning Problem for UAV Swarms with an Improved NSGA-III Algorithm. Int. J. Comput. Intell. Syst. 2018, 11, 1067–1081. [Google Scholar] [CrossRef]
- Ernest, N.; Cohen, K.; Schumacher, C. Collaborative Tasking of UAVs Using a Genetic Fuzzy Approach. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. [Google Scholar] [CrossRef]
- Lamont, G.B.; Slear, J.N.; Melendez, K. UAV Swarm Mission Planning and Routing Using Multi-Objective Evolutionary Algorithms. In Proceedings of the 2007 IEEE Symposium on Computational Intelligence in Multi-Criteria Decision-Making, Honolulu, HI, USA, 1–5 April 2007; pp. 10–20. [Google Scholar] [CrossRef]
- Fevgas, G.; Lagkas, T.; Argyriou, V.; Sarigiannidis, P. Coverage Path Planning Methods Focusing on Energy Efficient and Cooperative Strategies for Unmanned Aerial Vehicles. Sensors 2022, 22, 1235. [Google Scholar] [CrossRef] [PubMed]
- Nygard, K.E.; Chandler, P.R.; Pachter, M. Dynamic Network Flow Optimization Models for Air Vehicle Resource Allocation. In Proceedings of the 2001 American Control Conference. (Cat. No.01CH37148), Arlington, VA, USA, 25–27 June 2001; Volume 3, pp. 1853–1858. [Google Scholar] [CrossRef]
- Xing, L.; Johnson, B.W. Reliability Theory and Practice for Unmanned Aerial Vehicles. IEEE Internet Things J. 2023, 10, 3548–3566. [Google Scholar] [CrossRef]


| Supporting Arguments | Opposing Arguments |
|---|---|
| Safety Assurance: Current legislation has maintained safe airspaces for civilians and workers alike [24] | Stifles Innovation: Overbearing regulations prevent rapid testing and novel drone applications [15,20] |
| Accountability and Traceability: By enforcing operator registration and on-site operation accountability is assured [25,26] | Overreliance on Human Operators: One pilot one drone rulings directly oppose swarm operation. |
| Security and Privacy Protection: Prevents misuse of UAV systems for illegal means [19] | Inconsistent Standards: Divergent rule sets among regulators especially in regard to privacy and flight pathing [22] |
| Regulator | Country of Origin | JARUS Member | Legislative Implementation |
|---|---|---|---|
| CASA | Australia | Active | Early legislative adopter of JARUS, directly incorporated SORA into legislative documentation. |
| FAA | United States | Active | Actively assisted in the development of the SORA documentation. Advertises its use throughout its legislative processes. |
| CAAC | China | Active | Participates in JARUS discussions but internal regulations are independently referenced. |
| EASA | European Union | Active | A leading member of JARUS, EASA regulations closely align with JARUS instruments including the SORA. |
| Ref. | Pub. Year | Developed Algorithm | C1 | C2 | C3 | C4 |
|---|---|---|---|---|---|---|
| [79] | 2025 | BCIA | 50% | 0% | 0% | 12.5% |
| [80] | 2025 | TDC-MOPSO | 87.5% | 0% | 62.5% | 75% |
| [81] | 2025 | Improved CNP | 87.5% | 25% | 50% | 12.5% |
| [82] | 2025 | MT-MDP | 37.5% | 87.5% | 75% | 50% |
| [83] | 2025 | RCEA | 50% | 12.5% | 75% | 75% |
| [84] | 2025 | GDMTD3 | 25% | 0% | 75% | 25% |
| Ref. | Pub. Year | Developed Algorithm | C1 | C2 | C3 | C4 |
|---|---|---|---|---|---|---|
| [85] | 2024 | p-NSGA-IImv | 25% | 0% | 12.5% | 25% |
| [86] | 2024 | Modified Hierarchical Auctioning Algorithm | 50% | 25% | 25% | 25% |
| [87] | 2024 | DCTAEA | 25% | 0% | 25% | 12.5% |
| [88] | 2024 | CSS-MPCCC | 25% | 0% | 62.5% | 12.5% |
| [89] | 2024 | Adapted Market-Based Algorithm | 50% | 0% | 75% | 12.5% |
| [90] | 2024 | DDQN coupled MORL | 50% | 75% | 50% | 50% |
| [91] | 2024 | MPMFG and DTFSSMFG | 0% | 25% | 0% | 12.5% |
| [92] | 2024 | Red Fox | 50% | 0% | 0% | 12.5% |
| [93] | 2024 | MOEA | 50% | 25% | 75% | 25% |
| [94] | 2024 | MPSO-SA-DQN | 75% | 0% | 25% | 25% |
| [95] | 2024 | Modified GA | 50% | 0% | 0% | 12.5% |
| [96] | 2024 | Cooperative Combat Model | 87.5% | 0% | 75% | 75% |
| [97] | 2024 | MOALO-RSI | 50% | 0% | 75% | 25% |
| [98] | 2024 | VNS with MILP | 25% | 0% | 0% | 12.5% |
| [99] | 2024 | IMOGOA | 25% | 0% | 87.5% | 25% |
| Ref. | Pub. Year | Developed Algorithm | C1 | C2 | C3 | C4 |
|---|---|---|---|---|---|---|
| [100] | 2023 | DCSDM | 50% | 0% | 62.5% | 25% |
| [101] | 2023 | GMMAA | 0% | 0% | 0% | 25% |
| [65] | 2023 | IPSO | 0% | 0% | 0% | 25% |
| [102] | 2023 | IPSO | 50% | 0% | 12.5% | 25% |
| [103] | 2023 | DDPG | 50% | 0% | 62.5% | 25% |
| [104] | 2023 | IM-DPSO | 25% | 0% | 0% | 25% |
| [105] | 2023 | FMASAC | 25% | 37.5% | 12.5% | 12.5% |
| [69] | 2023 | DQN | 0% | 25% | 12.5% | 25% |
| [106] | 2023 | EMSSA | 0% | 50% | 62.5% | 50% |
| [107] | 2023 | PTMA | 50% | 0% | 62.5% | 37.5% |
| [68] | 2023 | IGA | 25% | 0% | 0% | 12.5% |
| [67] | 2023 | DA-PSO | 50% | 0% | 12.5% | 12.5% |
| [108] | 2023 | ILP Auction | 25% | 0% | 0% | 12.5% |
| Ref. | Pub. Year | Developed Algorithm | C1 | C2 | C3 | C4 |
|---|---|---|---|---|---|---|
| [109] | 2022 | PI-Predict | 75% | 0% | 87.5% | 87.5% |
| [64] | 2022 | QLHH-II | 50% | 12.5% | 25% | 12.5% |
| [110] | 2022 | Extended CNP | 62.5% | 87.5% | 25% | 37.5% |
| [111] | 2022 | MILP | 75% | 0% | 0% | 12.5% |
| [112] | 2022 | EN coupled NSGA-III | 50% | 0% | 75% | 12.5% |
| [113] | 2022 | IAGA | 50% | 25% | 0% | 25% |
| [114] | 2022 | MWPSO | 25% | 0% | 0% | 25% |
| [115] | 2022 | GTO | 50% | 0% | 0% | 12.5% |
| [116] | 2021 | BCI | 25% | 37.5% | 100% | 75% |
| [117] | 2021 | D-NSGA3 | 50% | 0% | 12.5% | 75% |
| [118] | 2021 | Advanced GA | 0% | 37.5% | 50% | 12.5% |
| [66] | 2021 | MOEA/D | 0% | 0% | 37.5% | 25% |
| [119] | 2021 | FCE | 50% | 0% | 87.5% | 25% |
| [120] | 2020 | QLHH | 25% | 0% | 37.5% | 25% |
| [121] | 2020 | Coalition Formation | 62.5% | 0% | 50% | 25% |
| [122] | 2018 | NSGA-II | 62.5% | 0% | 12.5% | 12.5% |
| [123] | 2018 | k-PICEA-G | 62.5% | 0% | 0% | 12.5% |
| [124] | 2018 | DACLD | 75% | 0% | 0% | 12.5% |
| [125] | 2018 | Improved NSGA-III | 50% | 0% | 37.5% | 12.5% |
| [126] | 2013 | Genetic Fuzzy Clustering | 25% | 0% | 0% | 12.5% |
| [127] | 2007 | Genetic Vehicle Routing | 0% | 25% | 0% | 12.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Checker, L.; Xie, H.; Khaksar, S.; Murray, I. Systematic Review of Multi-Objective UAV Swarm Mission Planning Systems from Regulatory Perspective. Drones 2025, 9, 509. https://doi.org/10.3390/drones9070509
Checker L, Xie H, Khaksar S, Murray I. Systematic Review of Multi-Objective UAV Swarm Mission Planning Systems from Regulatory Perspective. Drones. 2025; 9(7):509. https://doi.org/10.3390/drones9070509
Chicago/Turabian StyleChecker, Luke, Hui Xie, Siavash Khaksar, and Iain Murray. 2025. "Systematic Review of Multi-Objective UAV Swarm Mission Planning Systems from Regulatory Perspective" Drones 9, no. 7: 509. https://doi.org/10.3390/drones9070509
APA StyleChecker, L., Xie, H., Khaksar, S., & Murray, I. (2025). Systematic Review of Multi-Objective UAV Swarm Mission Planning Systems from Regulatory Perspective. Drones, 9(7), 509. https://doi.org/10.3390/drones9070509