


Cooperative Drone and Water Supply Truck Scheduling for Wildfire Fighting Using Deep Reinforcement Learning



Abstract
1. Introduction
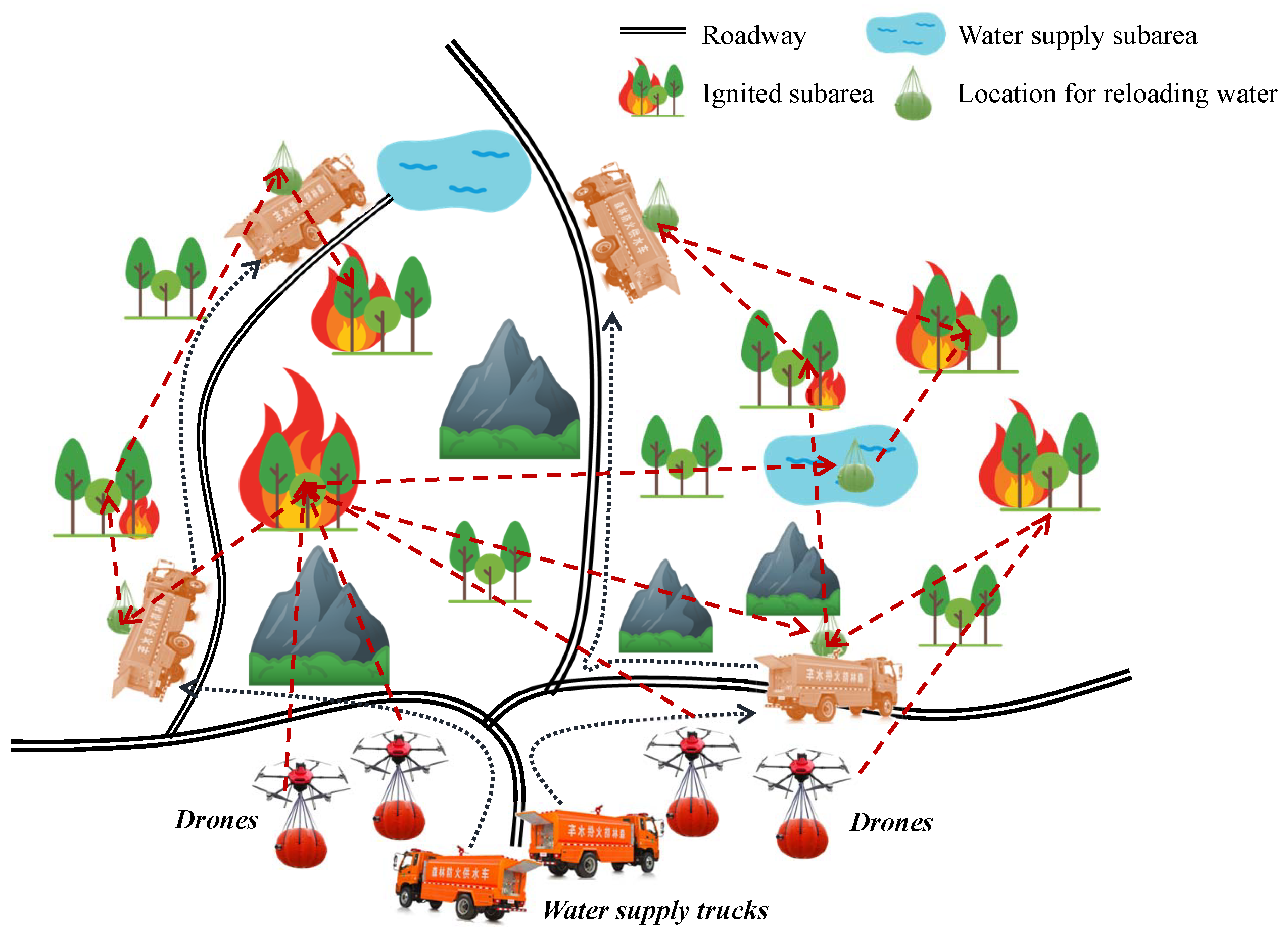
- We present an optimization problem of cooperatively scheduling drones and water supply trucks for wildfire fighting, which is increasingly popular but has been rarely studied in the literature.
- To meet the emergency response requirement, we propose a DRL method, which encodes a roadway network, airway network, environmental features, water supply information, and drone and truck features into high-level embeddings, which are then iteratively decoded to generate sequential decisions for the problem.
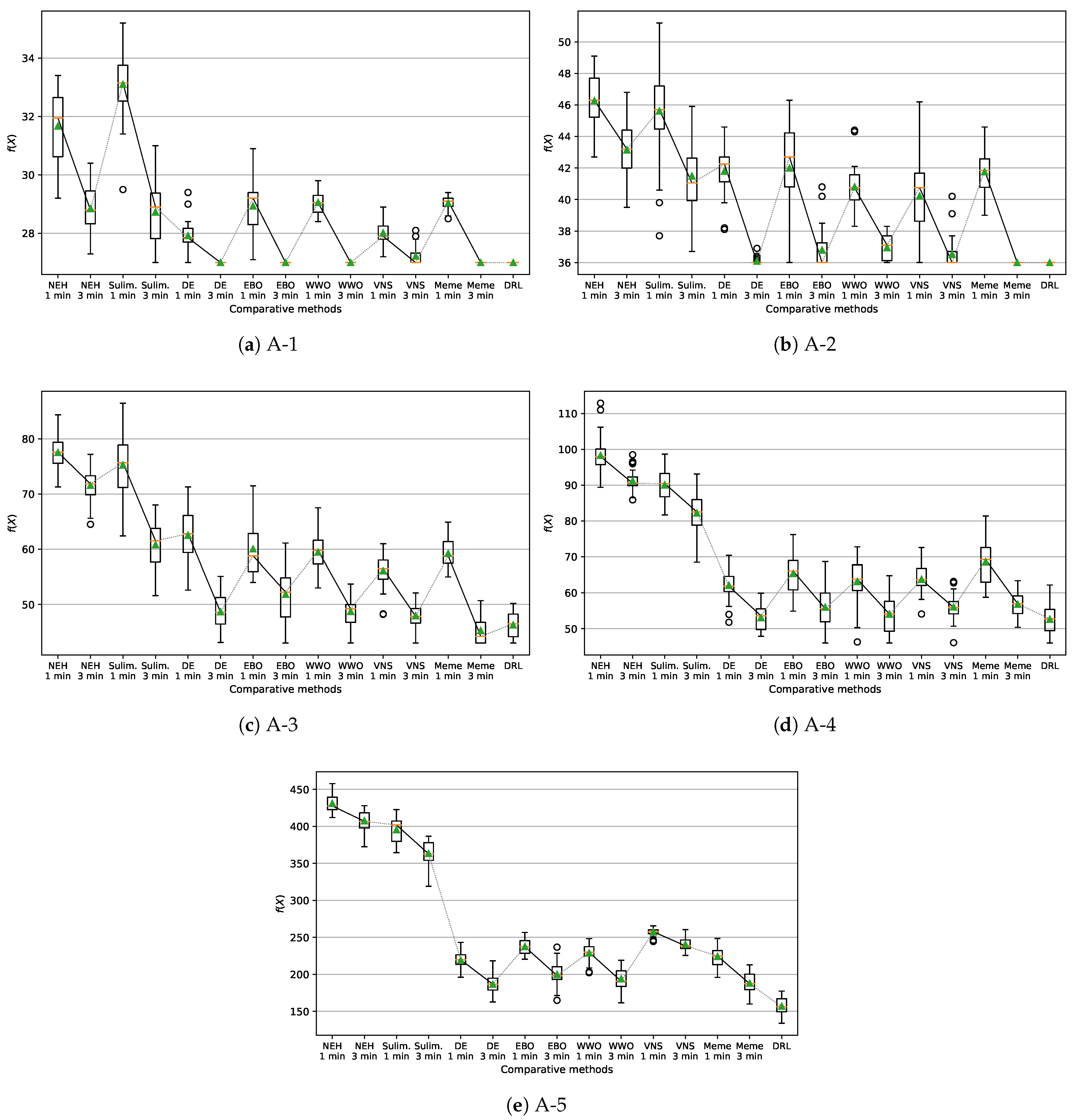
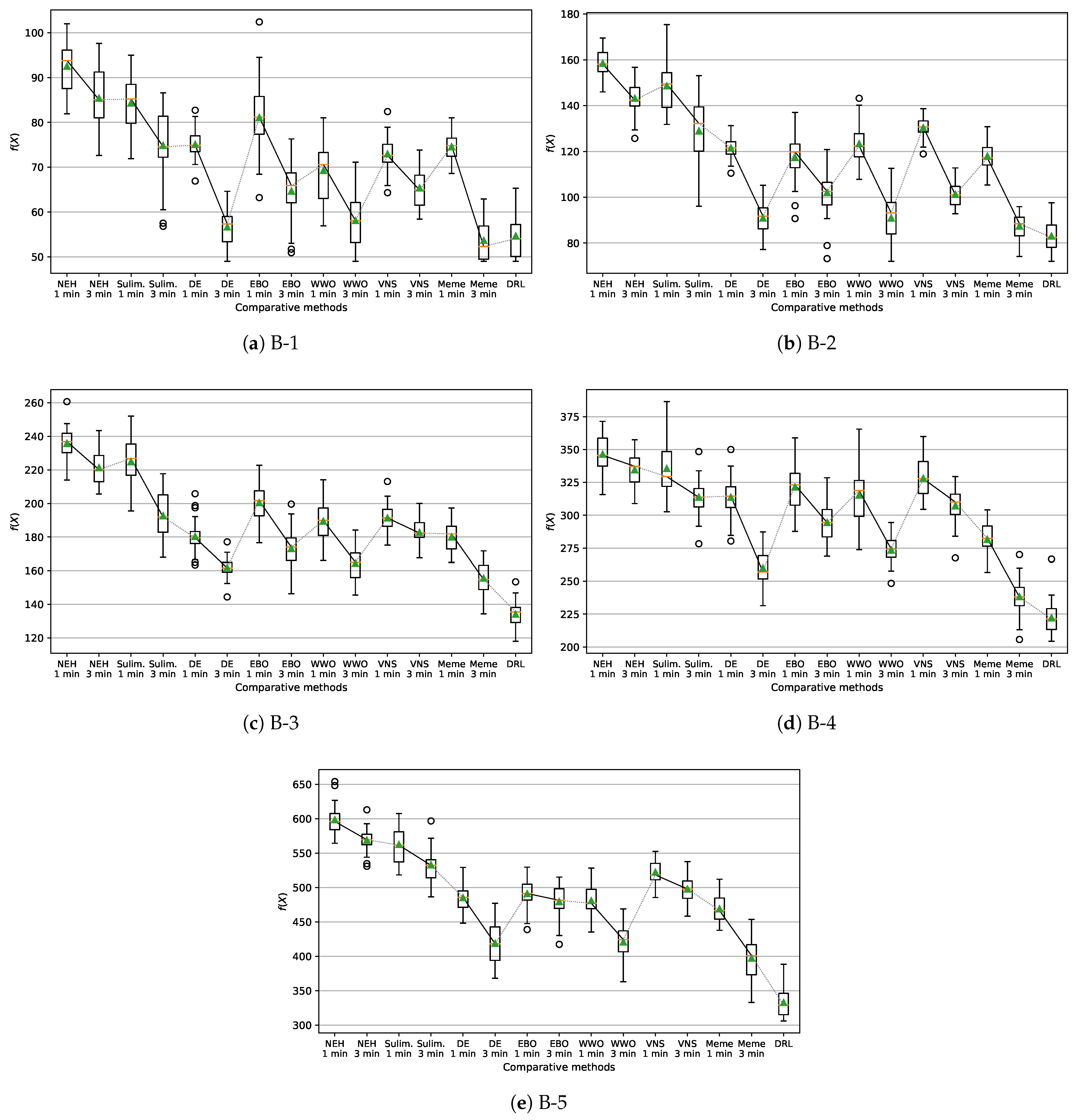
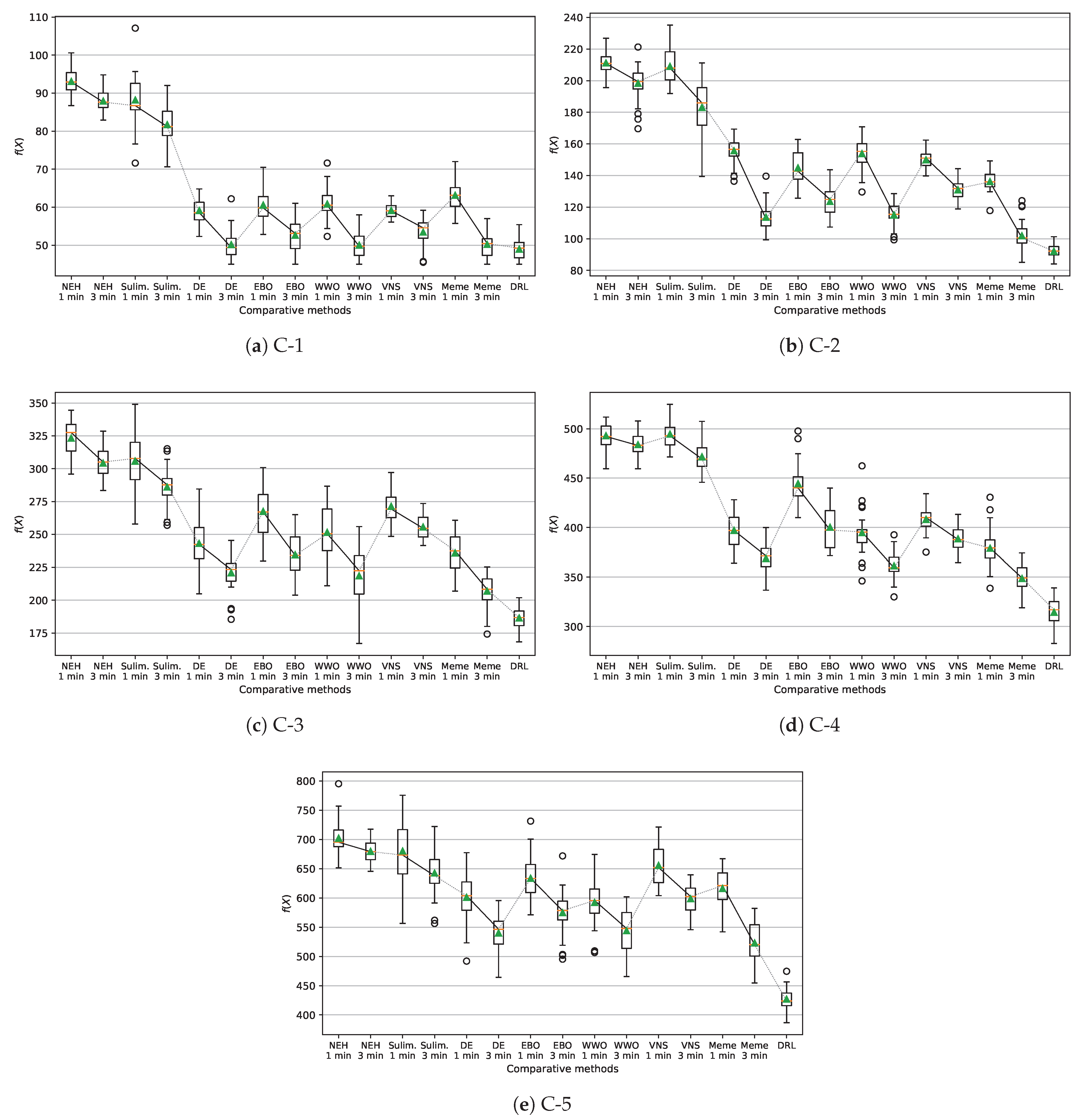
- We demonstrate the performance advantages of the proposed method compared to the state-of-the-art heuristic and metaheuristic optimization methods.
2. Related Work
2.1. Drone Scheduling for Firefighting
2.2. Cooperative Drone–Truck Scheduling
3. Problem Formulation
- The first subset of m ignitable subareas (e.g., woodlands, grasslands, and shrublands), denoted by .
- The second subset of water resource subareas (e.g., pools, lakes, and rivers), denoted by .
- For each ignitable subarea initially without fire, the expected time that will be ignited;
- For each ignitable subarea , the heat release rate at any time .
- consumed by a drone carrying a fully loaded water capsule from to .
- consumed by a drone carrying an empty water capsule from to .
- consumed by a fully loaded water supply truck from to .
- consumed by an empty water supply truck from to .
4. Deep Reinforcement Learning for the Problem
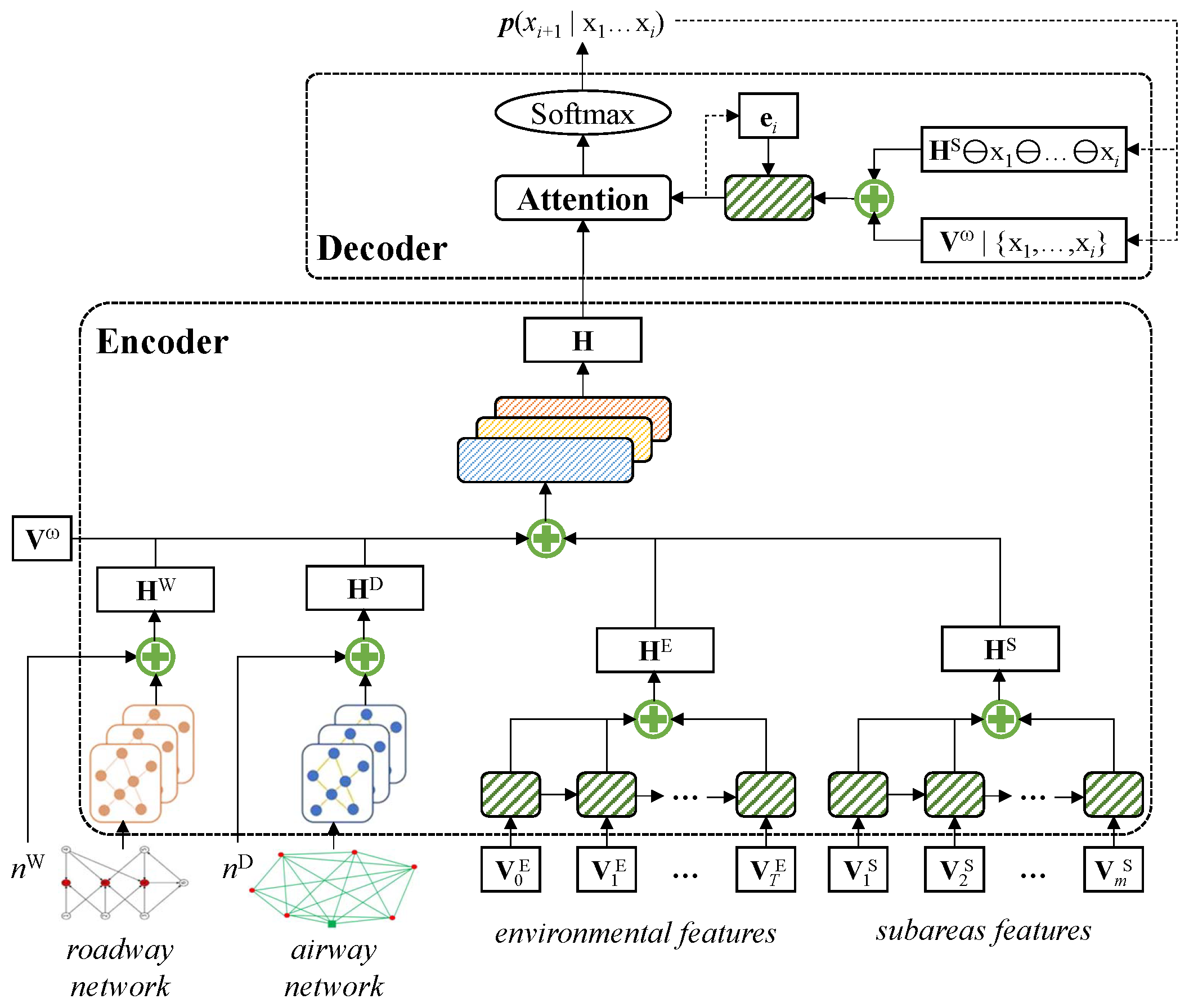
4.1. Encoder
- A roadway network used by water supply trucks, which is represented by a weighted adjacency matrix that saves the truck travel time on each edge (roadway segment).
- An airway network used by drones, also represented by a weighted adjacency matrix that saves the drone travel time on each edge (pair of vertices). The vertices of include not only the subareas, but also the vertices of .
- T environmental feature vectors, each of which saving the temperature, humidity, wind force, and wind direction at time t during the decision period T ().
- m ignited subarea feature vectors, each saving the area, combustible vegetation density, total combustion heat, and initial ignition state (true or false) of an ignited subarea ().
- A water volume vector that saves the water volume of each water supply subarea ().
- The number of drones and number of trucks.
4.2. Decoder
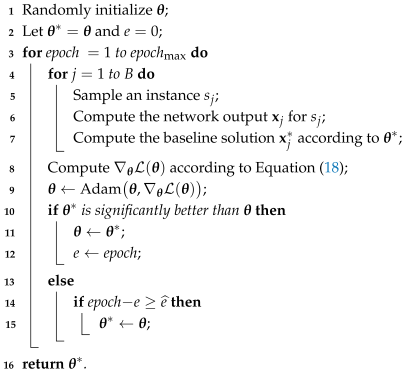
4.3. Training Method
| Algorithm 1: The policy gradient with rollout baseline algorithm for training the network. |
 |
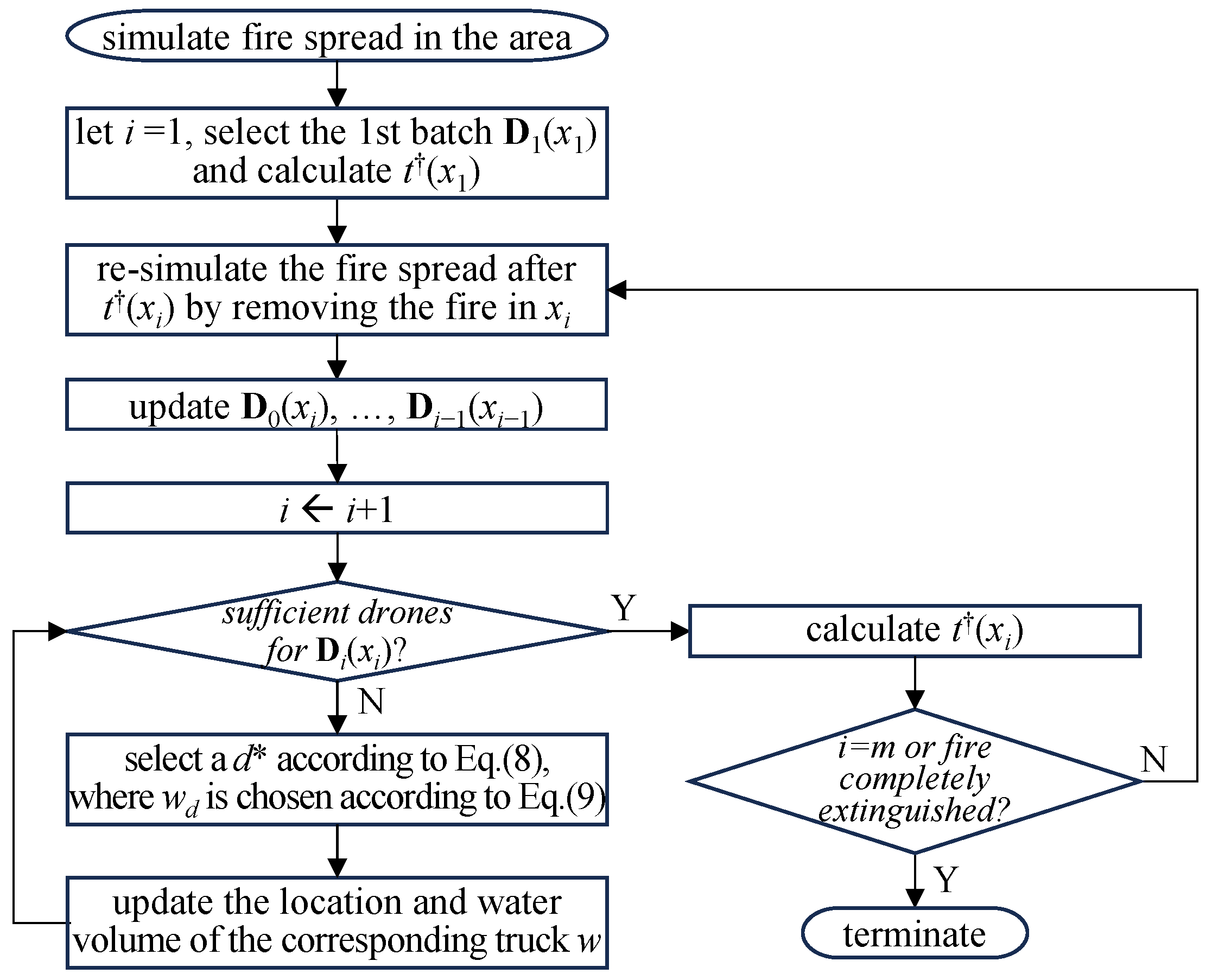
5. Computational Results
- Nawaz–Enscore–Ham (NEH) heuristic [30].
- Suliman heuristic [31] to solve each instance , and use the better one as the .
- Discrete differential evolution (DE) metaheuristic [32].
- EBO metaheuristic [33].
- Variable neighborhood search (VNS) algorithm [36].
- A memetic algorithm (denoted by Meme) for permutation optimization [37].
6. Conclusions
Author Contributions
Funding
Data Availability Statement
DURC Statement
Conflicts of Interest
Abbreviations
| DRL | Deep reinforcement learning |
| PSO | Particle swarm optimization |
| WWO | Water wave optimization |
| NEH | Nawaz–Enscore–Ham |
| DE | Discrete differential evolution |
| EBO | Ecogeography-based optimization |
| VNS | Variable neighborhood search |
| GNN | Graph neural network |
| RNN | Recurrent neural network |
References
- Akhloufi, M.A.; Couturier, A.; Castro, N.A. Unmanned Aerial Vehicles for Wildland Fires: Sensing, Perception, Cooperation and Assistance. Drones 2021, 5, 15. [Google Scholar] [CrossRef]
- Roldán-Gómez, J.J.; González-Gironda, E.; Barrientos, A. A survey on robotic technologies for forest firefighting: Applying drone swarms to improve firefighters’ efficiency and safety. Appl. Sci. 2021, 11, 363. [Google Scholar] [CrossRef]
- Mohd Daud, S.M.S.; Mohd Yusof, M.Y.P.; Heo, C.C.; Khoo, L.S.; Chainchel Singh, M.K.; Mahmood, M.S.; Nawawi, H. Applications of drone in disaster management: A scoping review. Sci. Justice 2022, 62, 30–42. [Google Scholar] [CrossRef] [PubMed]
- Wu, R.Y.; Xie, X.C.; Zheng, Y.J. Firefighting drone configuration and scheduling for wildfire based on loss estimation and minimization. Drones 2024, 8, 17. [Google Scholar] [CrossRef]
- Jemmali, M.; Loai Kayed, B.M.; Boulila, W.; Amdouni, H.; Alharbi, M.T. Optimizing Forest Fire Prevention: Intelligent Scheduling Algorithms for Drone-Based Surveillance System. Proc. Comput. Sci. 2023, 225, 1562–1571. [Google Scholar] [CrossRef]
- Liu, W.; Lyu, S.K.; Liu, T.; Wu, Y.T.; Qin, Z. Multi-Target Optimization Strategy for Unmanned Aerial Vehicle Formation in Forest Fire Monitoring Based on Deep Q-Network algorithm. Drones 2024, 8, 201. [Google Scholar] [CrossRef]
- Kumar, M.; Cohen, K.; HomChaudhuri, B. Cooperative Control of Multiple Uninhabited Aerial Vehicles for Monitoring and Fighting Wildfires. J. Aerosp. Comput. Inf. Commun. 2011, 8, 1–16. [Google Scholar] [CrossRef]
- Ghamry, K.A.; Kamel, M.A.; Zhang, Y. Multiple UAVs in forest fire fighting mission using particle swarm optimization. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1404–1409. [Google Scholar] [CrossRef]
- Ausonio, E.; Bagnerini, P.; Ghio, M. Drone Swarms in Fire Suppression Activities: A Conceptual Framework. Drones 2021, 5, 17. [Google Scholar] [CrossRef]
- Yu, Q.; He, H.; Li, M.; Hou, D.; Zhang, J.; Wang, X. Research on UAV Scheduling Optimization in the Forest Fire. In Lecture Notes on Data Engineering and Communications Technologies, Proceedings of the International Conference Machine Learning and Big Data Analytics for IoT Security and Privacy, Online, 30 October 2021; Macintyre, J., Zhao, J., Ma, X., Eds.; Springer: Cham, Switzerland, 2022; pp. 770–777. [Google Scholar] [CrossRef]
- Chen, X.; Xiao, Z.; Cheng, Y.; Hsia, C.C.; Wang, H.; Xu, J.; Xu, S.; Dang, F.; Zhang, X.P.; Liu, Y.; et al. SOScheduler: Toward Proactive and Adaptive Wildfire Suppression via Multi-UAV Collaborative Scheduling. IEEE Internet Things J. 2024, 11, 24858–24871. [Google Scholar] [CrossRef]
- Tan, Q.; Wu, N.; Wu, X. Optimization-Based (UAV) Scheduling Model for Wildfire Management. In Lecture Notes in Networks and Systems, Proceedings of the 2nd International Conference Frontiers of Robotics and Software Engineering, Guiyang, China, 14–16 June 2024; Hu, J., Zhang, J., Eds.; Hu, J., Zhang, J., Eds.; Springer: Singapore, 2025; pp. 52–59. [Google Scholar] [CrossRef]
- Zhu, P.; Song, R.; Zhang, J.; Xu, Z.; Gou, Y.; Sun, Z.; Shao, Q. Multiple UAV Swarms Collaborative Firefighting Strategy Considering Forest Fire Spread and Resource Constraints. Drones 2025, 9, 17. [Google Scholar] [CrossRef]
- John, J.; Harikumar, K.; Senthilnath, J.; Sundaram, S. An Efficient Approach With Dynamic Multiswarm of UAVs for Forest Firefighting. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 2860–2871. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Zhang, Z.Y.; Yan, J.Y.; Sheng, W.G. Cooperative UAV Scheduling for Power Grid Deicing Using Fuzzy Learning and Evolutionary Optimization. IEEE Open J. Ind. Appl. 2025, 6, 15–33. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Xie, X.C.; Zhang, Z.Y.; Shi, J.T. Deep reinforcement learning assisted memetic scheduling of drones for railway catenary deicing. Swarm Evol. Comput. 2024, 91, 101719. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Liu, H.; Zhang, H.; Chen, S. Guest Editorial Introduction to the Special Issue on Intelligent Transportation Systems in Epidemic Areas. IEEE Trans. Intell. Transp. Syst. 2022, 23, 25059–25061. [Google Scholar] [CrossRef]
- Wu, G.; Mao, N.; Luo, Q.; Xu, B.; Shi, J.; Suganthan, P.N. Collaborative Truck-Drone Routing for Contactless Parcel Delivery During the Epidemic. IEEE Trans. Intell. Transp. Syst. 2022, 23, 25077–25091. [Google Scholar] [CrossRef]
- Wu, G.; Fan, M.; Shi, J.; Feng, Y. Reinforcement Learning Based Truck-and-Drone Coordinated Delivery. IEEE Trans. Artif. Intell. 2023, 4, 754–763. [Google Scholar] [CrossRef]
- Weng, Y.Y.; Wu, R.Y.; Zheng, Y.J. Cooperative Truck-Drone Delivery Path Optimization under Urban Traffic Restriction. Drones 2023, 7, 59. [Google Scholar] [CrossRef]
- Young Jeong, H.; Lee, S. Drone routing problem with truck: Optimization and quantitative analysis. Expert Syst. Appl. 2023, 227, 120260. [Google Scholar] [CrossRef]
- Liu, Y.; Shi, J.; Luo, Z.; Hu, X.; Pedrycz, W.; Liu, Z. Cooperated Truck-Drone Routing With Drone Energy Consumption and Time Windows. IEEE Trans. Intell. Transp. Syst. 2024, 25, 20390–20404. [Google Scholar] [CrossRef]
- Lv, K.C.; Zhang, Z.Y.; Bai, L.Y.; Jiang, X.L.; Zheng, Y.J. Memetic Optimization of Collaborative Human-UAV-Truck Search-and-Rescue Task Scheduling in Earthquakes. Unmanned Syst. 2025, 13, 1–21. [Google Scholar] [CrossRef]
- Filkov, A.I.; Tihay-Felicelli, V.; Masoudvaziri, N.; Rush, D.; Valencia, A.; Wang, Y.; Blunck, D.L.; Valero, M.M.; Kempna, K.; Smolka, J.; et al. A review of thermal exposure and fire spread mechanisms in large outdoor fires and the built environment. Fire Saf. J. 2023, 140, 103871. [Google Scholar] [CrossRef]
- Wang, S.; Zheng, C.; Wandelt, S. Policy Challenges for Coordinated Delivery of Trucks and Drones. J. Air Transp. Res. Soc. 2024, 2, 100001. [Google Scholar] [CrossRef]
- Tu, W. Resource-efficient seamless transitions for high-performance multi-hop UAV multicasting. Computer Netw. 2022, 213, 109051. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, X.; Zhang, R. Trajectory Optimization for Completion Time Minimization in UAV-Enabled Multicasting. arXiv 2017, arXiv:1708.06478. [Google Scholar] [CrossRef]
- Kool, W.; van Hoof, H.; Welling, M. Attention, learn to solve routing problems! In Proceedings of the 7th International Conference on Learning Representations, New Orleans, LA, USA, 6–9 May 2019. [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. In Proceedings of the 3rd International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar] [CrossRef]
- Nawaz, M.; Enscore, E.E.; Ham, I. A heuristic algorithm for the m-machine, n-job flow-shop sequencing problem. Omega 1983, 11, 91–95. [Google Scholar] [CrossRef]
- Suliman, S.M.A. A two-phase heuristic approach to the permutation flow-shop scheduling problem. Int. J. Prod. Econom. 2000, 64, 143–152. [Google Scholar] [CrossRef]
- de Fátima Morais, M.; Ribeiro, M.H.D.M.; da Silva, R.G.; Mariani, V.C.; dos Santos Coelho, L. Discrete differential evolution metaheuristics for permutation flow shop scheduling problems. Comput. Ind. Eng. 2022, 166, 107956. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Ling, H.F.; Xue, J.Y. Ecogeography-Based Optimization: Enhancing Biogeography-Based Optimization with Ecogeographic Barriers and Differentiations. Comput. Oper. Res. 2014, 50, 115–127. [Google Scholar] [CrossRef]
- Zheng, Y.J. Water wave optimization: A new nature-inspired metaheuristic. Comput. Oper. Res. 2015, 55, 1–11. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Lu, X.Q.; Du, Y.C.; Xue, Y.; Sheng, W.G. Water wave optimization for combinatorial optimization: Design strategies and applications. Appl. Soft Comput. 2019, 83, 105611. [Google Scholar] [CrossRef]
- Shao, W.; Shao, Z.; Pi, D. Multi-local search-based general variable neighborhood search for distributed flow shop scheduling in heterogeneous multi-factories. Appl. Soft Comput. 2022, 125, 109138. [Google Scholar] [CrossRef]
- Zhao, F.; Hu, X.; Wang, L.; Li, Z. A memetic discrete differential evolution algorithm for the distributed permutation flow shop scheduling problem. Complex Intell. Syst. 2022, 8, 141–161. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Chen, S.Y.; Ling, H.F. Evolutionary optimization for disaster relief operations: A survey. Appl. Soft Comput. 2015, 27, 553–566. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Du, Y.C.; Sheng, W.G.; Ling, H.F. Collaborative human-UAV search and rescue for missing tourists in nature reserves. INFORMS J. Appl. Analy. 2019, 49, 371–383. [Google Scholar] [CrossRef]
- Zheng, Y.; Du, Y.; Ling, H.; Sheng, W.; Chen, S. Evolutionary collaborative human-UAV search for escaped criminals. IEEE Trans. Evol. Comput. 2020, 24, 217–231. [Google Scholar] [CrossRef]
- Zheng, Y.J.; Du, Y.C.; Su, Z.L.; Ling, H.F.; Zhang, M.X.; Chen, S.Y. Evolutionary human-UAV cooperation for transmission network restoration. IEEE Trans. Ind. Informat. 2021, 17, 1648–1657. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wilderness Area | Num of Ignitable Subareas | Num of Water Supply Subareas | Test Instance | Num of Drones | Num of Trucks |
|---|---|---|---|---|---|
| A-1 | 6 | 1 | |||
| A-2 | 8 | 1 | |||
| A | 127 | 16 | A-3 | 10 | 2 |
| A-4 | 12 | 2 | |||
| A-5 | 15 | 2 | |||
| B-1 | 6 | 1 | |||
| B-2 | 8 | 1 | |||
| B | 189 | 12 | B-3 | 10 | 2 |
| B-4 | 12 | 2 | |||
| B-5 | 15 | 2 | |||
| C-1 | 6 | 1 | |||
| C-2 | 10 | 2 | |||
| C | 265 | 19 | C-3 | 15 | 2 |
| C-4 | 18 | 3 | |||
| C-5 | 21 | 3 |
| Instance | A-1 | A-2 | A-3 | A-4 | A-5 | B-1 | B-2 | B-3 | B-4 | B-5 | C-1 | C-2 | C-3 | C-4 | C-5 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Time | 12 | 12 | 14 | 14 | 15 | 15 | 15 | 18 | 19 | 21 | 17 | 21 | 23 | 29 | 32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bai, L.-Y.; Chen, X.-Y.; Ling, H.-F.; Zheng, Y.-J. Cooperative Drone and Water Supply Truck Scheduling for Wildfire Fighting Using Deep Reinforcement Learning. Drones 2025, 9, 464. https://doi.org/10.3390/drones9070464
Bai L-Y, Chen X-Y, Ling H-F, Zheng Y-J. Cooperative Drone and Water Supply Truck Scheduling for Wildfire Fighting Using Deep Reinforcement Learning. Drones. 2025; 9(7):464. https://doi.org/10.3390/drones9070464
Chicago/Turabian StyleBai, Lin-Yuan, Xin-Ya Chen, Hai-Feng Ling, and Yu-Jun Zheng. 2025. "Cooperative Drone and Water Supply Truck Scheduling for Wildfire Fighting Using Deep Reinforcement Learning" Drones 9, no. 7: 464. https://doi.org/10.3390/drones9070464
APA StyleBai, L.-Y., Chen, X.-Y., Ling, H.-F., & Zheng, Y.-J. (2025). Cooperative Drone and Water Supply Truck Scheduling for Wildfire Fighting Using Deep Reinforcement Learning. Drones, 9(7), 464. https://doi.org/10.3390/drones9070464