1. Introduction
As an advanced design with an updated configuration compared to a traditional configuration, the flying-wing UAV presents more challenges and greater research difficulties. These include the study of aerodynamic optimization and control problems in the cruising state. Nickol et al. [
1] conducted research on the aerodynamic performance of a civilian blended wing body (BWB) configuration and found that this configuration offers significant fuel consumption advantages over the traditional configuration, with savings of up to 39%. This underscores the benefits of wing configuration in terms of lift and drag characteristics during cruise. Zhang et al. [
2] explored and optimized the relationship between the static stability margin and fuel consumption in the cruising state of the flying-wing UAV design. Their findings revealed that the static stability margin is closely related to fuel consumption. The mechanism behind this is that the static stability margin significantly impacts the configuration design, with a lower stability design leading to improved cruise efficiency. This research provides valuable guidance for the design of flying-wing UAV, suggesting that designers can enhance cruise performance by improving control system capabilities and reducing static stability.
As early as the beginning of 2000, significant research had been conducted on the aerodynamic performance optimization of the blended wing body (BWB) configuration, mainly focusing on wing shape optimization and external drag reduction of BWB [
3]. Qin et al. [
4] studied the lift distribution and the effect of twist angle on the spanwise lift distribution when optimizing the wing profile of BWB. This study emphasized the ideal lift distribution and the reduction in drag caused by lift-induced vortices rather than torque characteristics. Nevertheless, when studying the configuration of Lambda wings, due to the fact that Lambda wings often exhibit unstable pitching moments at high angles of attack, the process of moment instability is also investigated [
5]. Taking Lee et al.’s [
6] research as an example, when adding vortex generators to Lambda wings and optimizing the planform, it is necessary to ensure high lift and drag characteristics while also considering the characteristics of high-angle-of-attack pitch moment and increasing the maximum available lift coefficient. However, the moment curve described in this article clearly indicates a zero-lift pitch moment problem, which means that the zero-lift pitch moment remains in a low pitch-down state and requires additional rudder deflection during cruising to achieve normal flight. This problem inevitably leads to increased resistance caused by the control surface, decreasing the cruising lift-to-drag ratio. Even though this was not examined in the article, in practical applications, such a solution would still be unacceptable [
7].
A large part of the above research is the result of the combination of Lambda-wing and flying-wing configurations. The pitching moment characteristics at high angles of attack for this configuration are often difficult to directly solve when optimizing this wing configuration combination, but the problem of zero-lift pitch moment is not without a solution. The most common method is to arrange some super heavy equipment behind the UAV. The method of using the engine layout for non-linear trimming mentioned in Mardanpour et al.’s serial articles [
8,
9,
10] can adjust the cruise state moment by adjusting the center of gravity, but it also leads to a decrease in static stability margin. Based on an atypical wing configuration, Mader [
11] established an optimization model by changing the wing sweep angle and other configuration parameters, combined with the adjustment of the twist angle, and ultimately improved the pitch moment stability of the model. This research demonstrates the importance of studying the static stability of Lambda-wing UAVs.
However, the configuration design is often constrained by multiple factors at the beginning of the design process. Common approaches to addressing zero-lift pitch moment include replacing the unloaded airfoil, increasing the twist angle and unloading the trailing edge. Tomasz [
12] conducted a moment trimming and stability analysis on wings such as canard, flying wing, three-surface tandem wing and box wing and proposed a method of adjusting the moment using weight distribution based on fear of counterweights and structures. Huijts et al. [
13] analyzed the drag impact of moment trimming using control surface and proved its side effect on drag force. Karimi et al. [
14,
15] have focused on the elastic torsion and control systems of wings, aiming to redistribute the aerodynamic moment through elastic torsion and achieve cruise trim state. Syed et al. [
16] also analyzed and optimized the aeroelastic process of a flexible airfoil of a flying-wing aircraft with an ultra-long display ratio during deformation. The primary mechanism in this study is the generation of significant post-unloading deformation at the trailing edge of the airfoil. The aerodynamic analysis part includes the process of pitching moment trimming. Xu et al. [
17] chose jet flow control for the manipulation and trimming of longitudinal moment. These research studies have demonstrated that the moment trimming process for flying-wing UAVs is a crucial research direction in the design of longitudinal static stability.
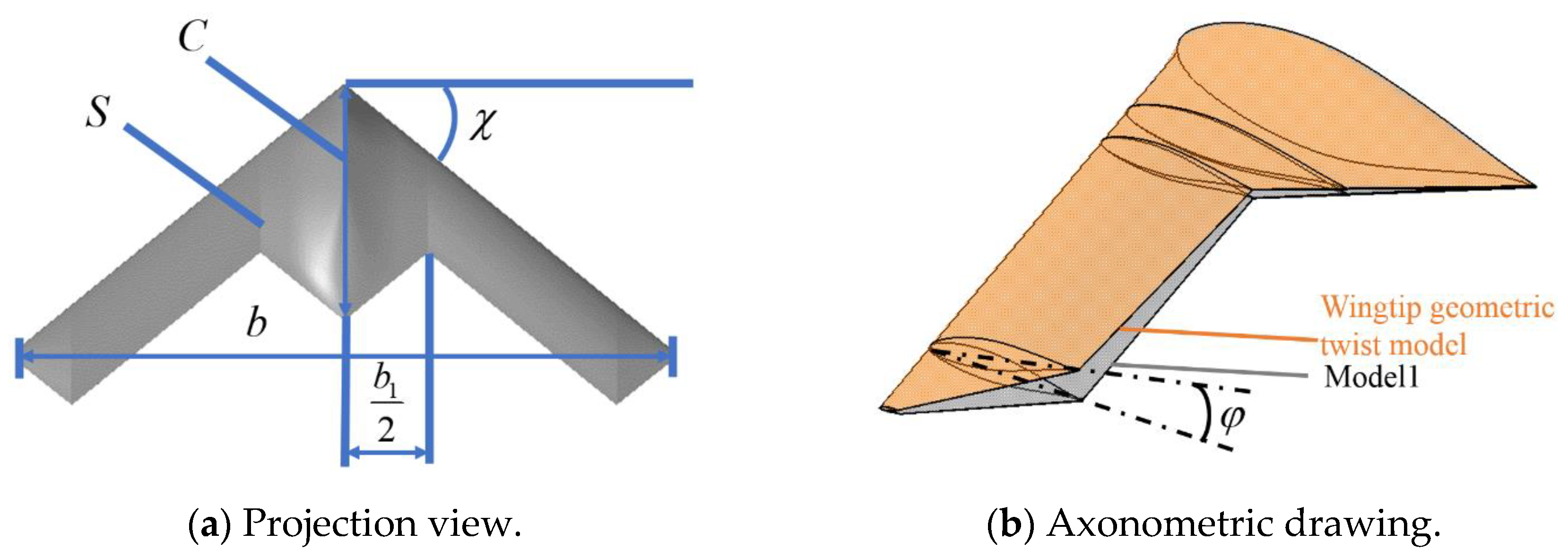
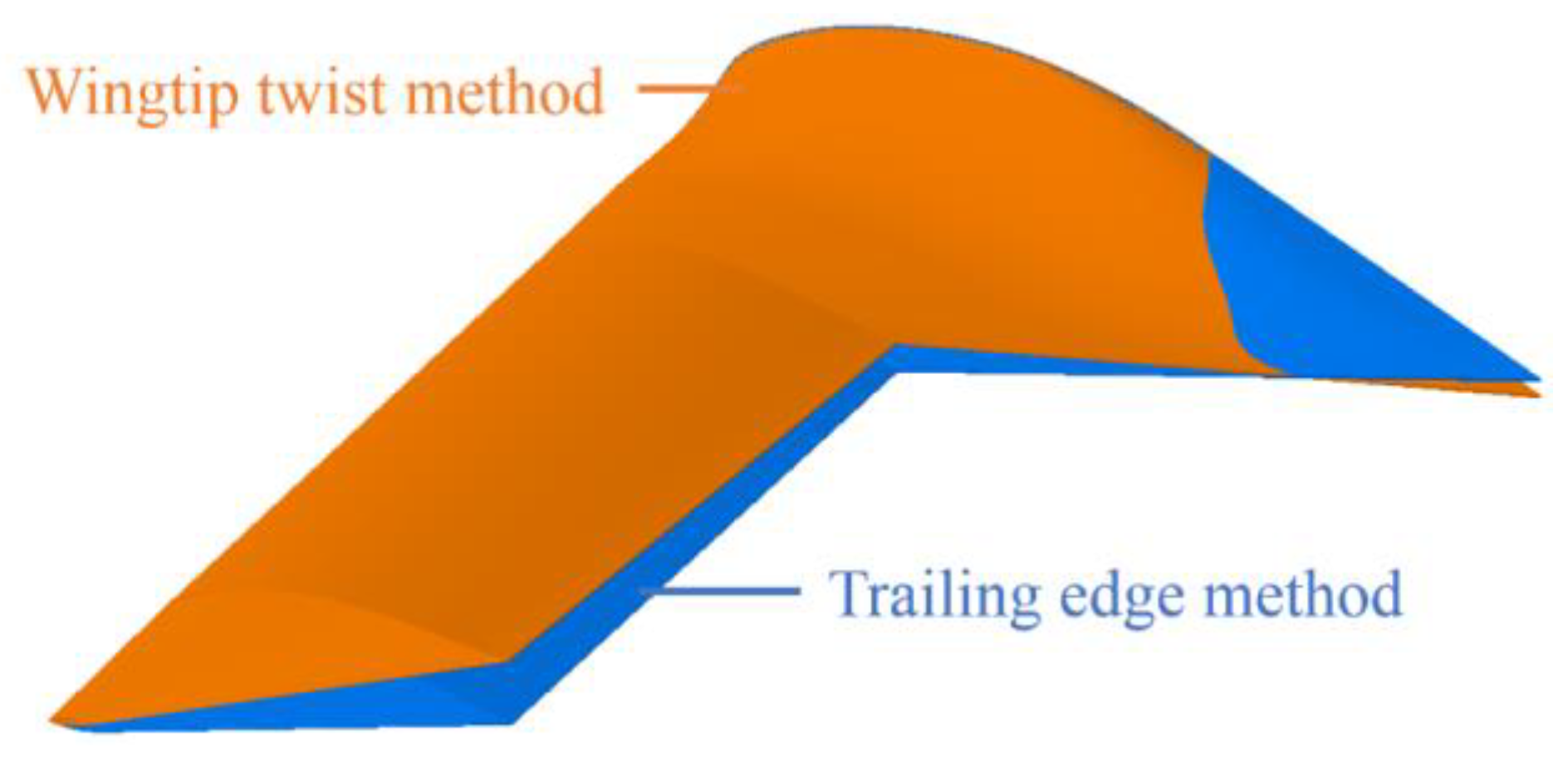
To address the cruise trim moment problem in flying-wing UAVs, various solutions have been explored by scholars worldwide. Common approaches include adjustment of control surface, negative wingtip twist, unloading wing profiles and trailing-edge twist. While adjusting control surfaces is the simplest method, it significantly compromises the lift-to-drag ratio. For example, the X-47B uses a −10° wingtip twist angle [
18] and requires an elevator setting of −23.4° [
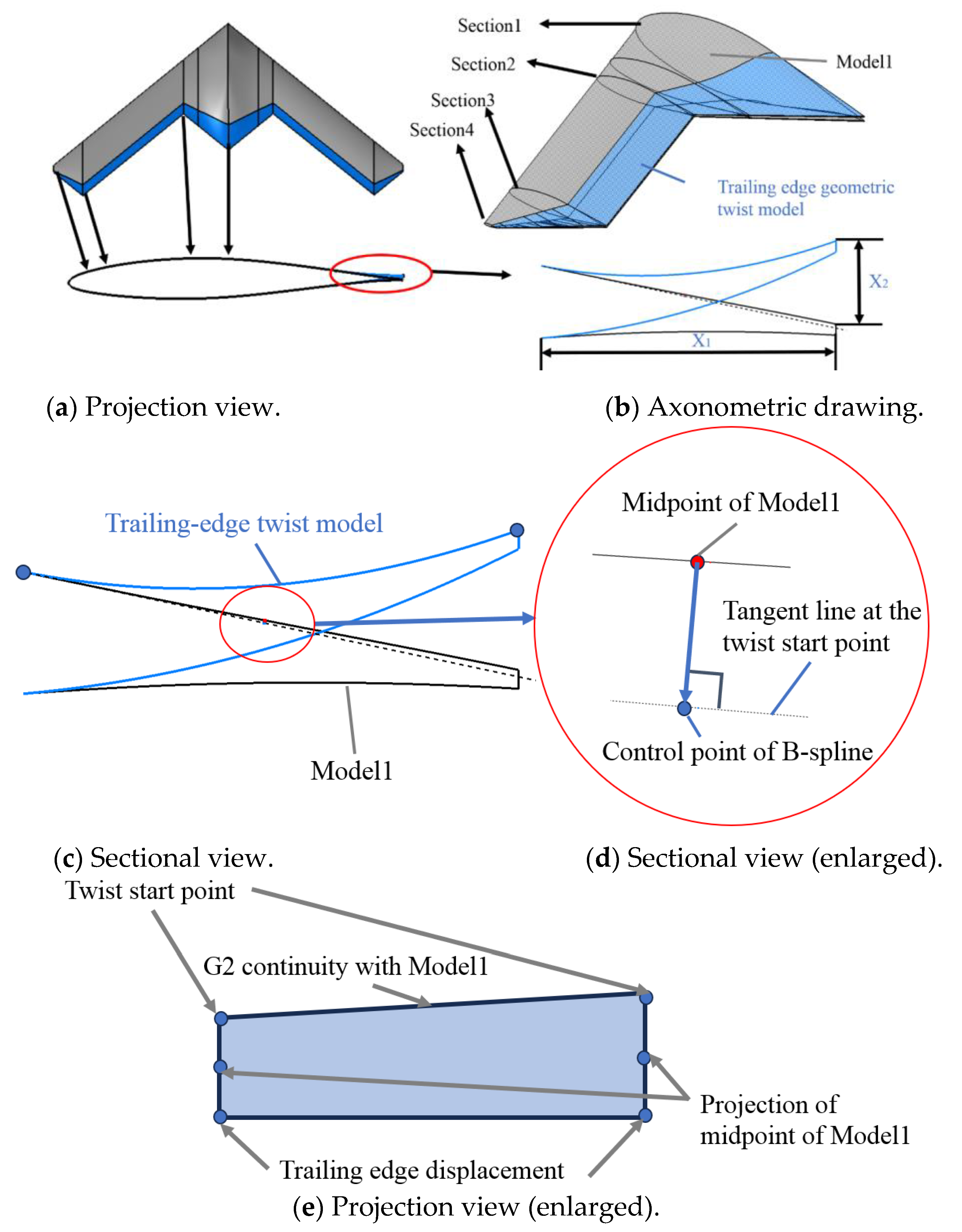
19] to achieve moment trimming for cruise flight. However, this approach can negatively impact lift distribution and the lift-to-drag ratio. Thus, optimizing wingtip twist angles is essential, either to achieve specific lift coefficients or to maximize the lift-to-drag ratio. Both unloading wing profiles and trailing-edge twist work by reducing lift at the trailing edge to generate a pitch-up moment for trim. However, trailing-edge twist is more versatile, as it directly modifies the wing external shape, offering a broader range of feasible solutions compared to unloading wing profiles.
The advantages and disadvantages of trailing-edge twist and wingtip twist in solving cruise trim problems on a Lambda-wing configuration UAV are analyzed in this paper. A parameterized UAV baseline model with eight parameters for trailing-edge twist is designed and optimized. The analysis results ultimately prove that the trailing-edge twist model improves the degrees of freedom of the model by allowing for the parameter distribution of the twist in multiple sections. And the optimized model redistributes the pitching moment and achieves both drag reduction and trimming.
3. Results and Discussion
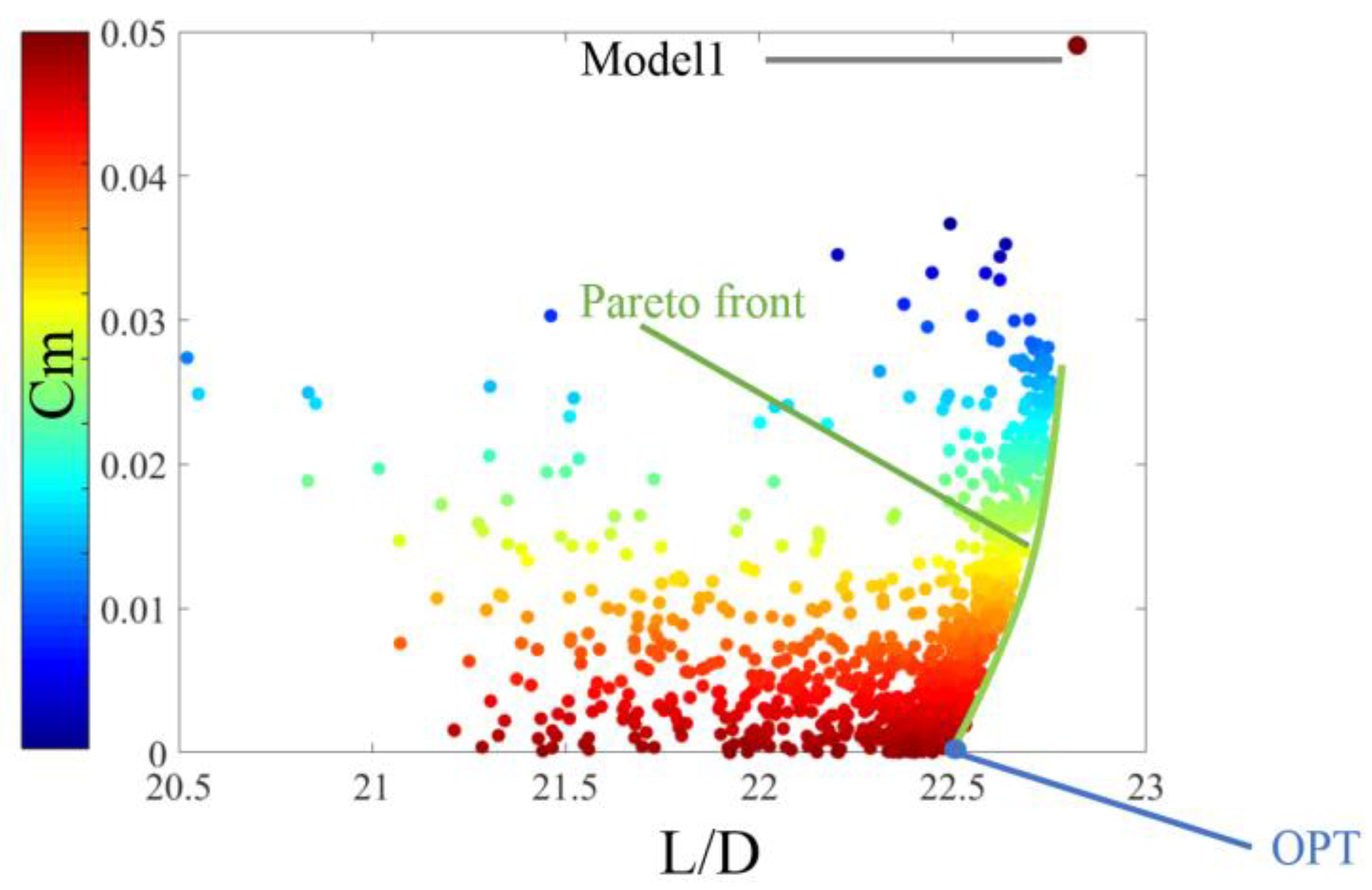
The final results are shown in
Figure 13. During the optimization process, a total of 1586 computations were performed, including initial sample points and points generated after iterations. Out of these, 1429 computations were valid. The invalid points included cases of grid generation errors, non-convergent grid computations and failures in the search for the cruising lift coefficient. The optimization results clearly show the Pareto front (points near the green curve). From the Pareto front, the optimal result OPT was selected, marked at the bottom right corner of
Figure 13, corresponding to the advantages in moment coefficient and lift-to-drag characteristics. The optimal result OPT is the model where the lift-to-drag ratio is maximized when the trimming moment is less than 2 × 10
−4.
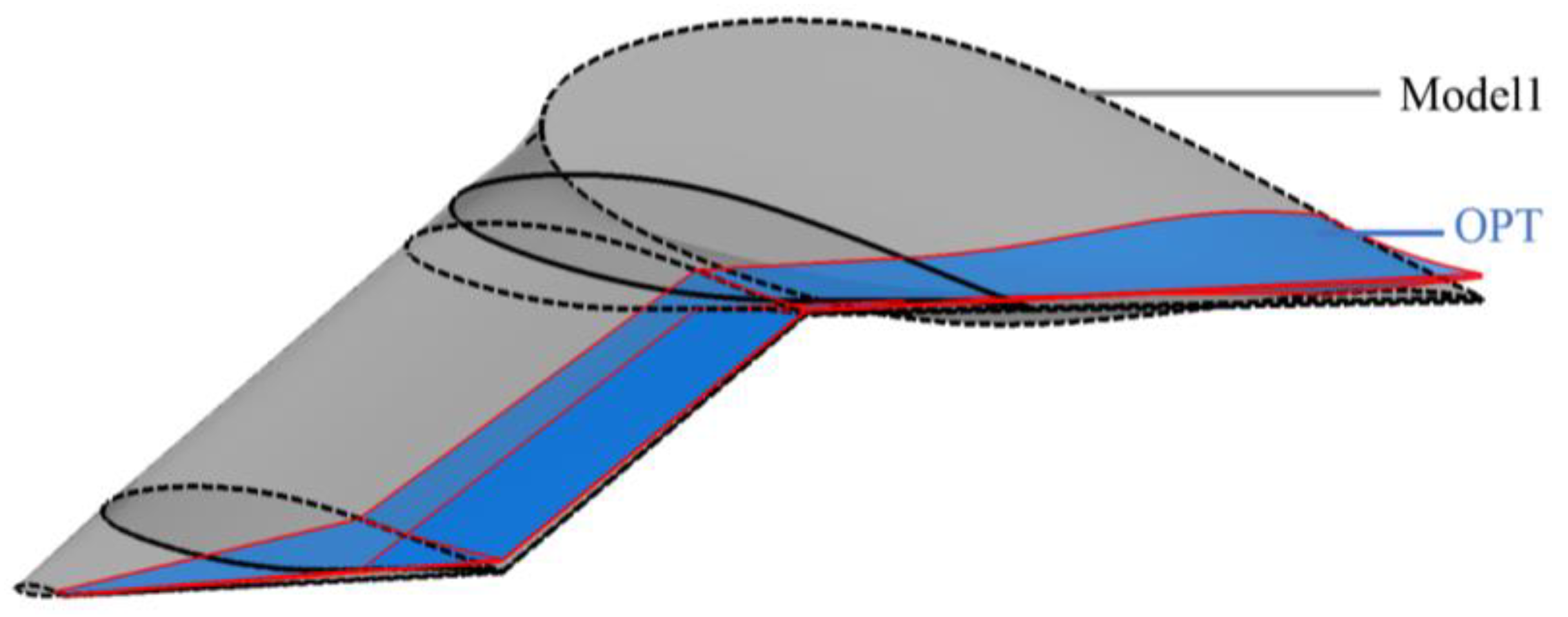
The results indicate that there is a conflict between the pitching moment coefficient and the lift-to-drag ratio within the red Pareto front. A high lift-to-drag ratio implies an increase in trim moment, and an increased trim moment means more control required from the elevator in cruise conditions, which in turn reduces the lift-to-drag ratio. Considering that the main objective of this paper was to achieve trim in cruise state, the model at the bottom right corner was selected. This model is the result of the 1375th computation, which is the 31st individual of the 22nd generation in the genetic algorithm. In the following three generations, no results achieved a higher lift-to-drag ratio with successful trim than this model. This model will be named OPT in the following text. The values of independent variables and values of aerodynamic characteristics are shown in
Table 6 and
Table 7. And the comparison of Model1 and OPT is shown in
Figure 14.
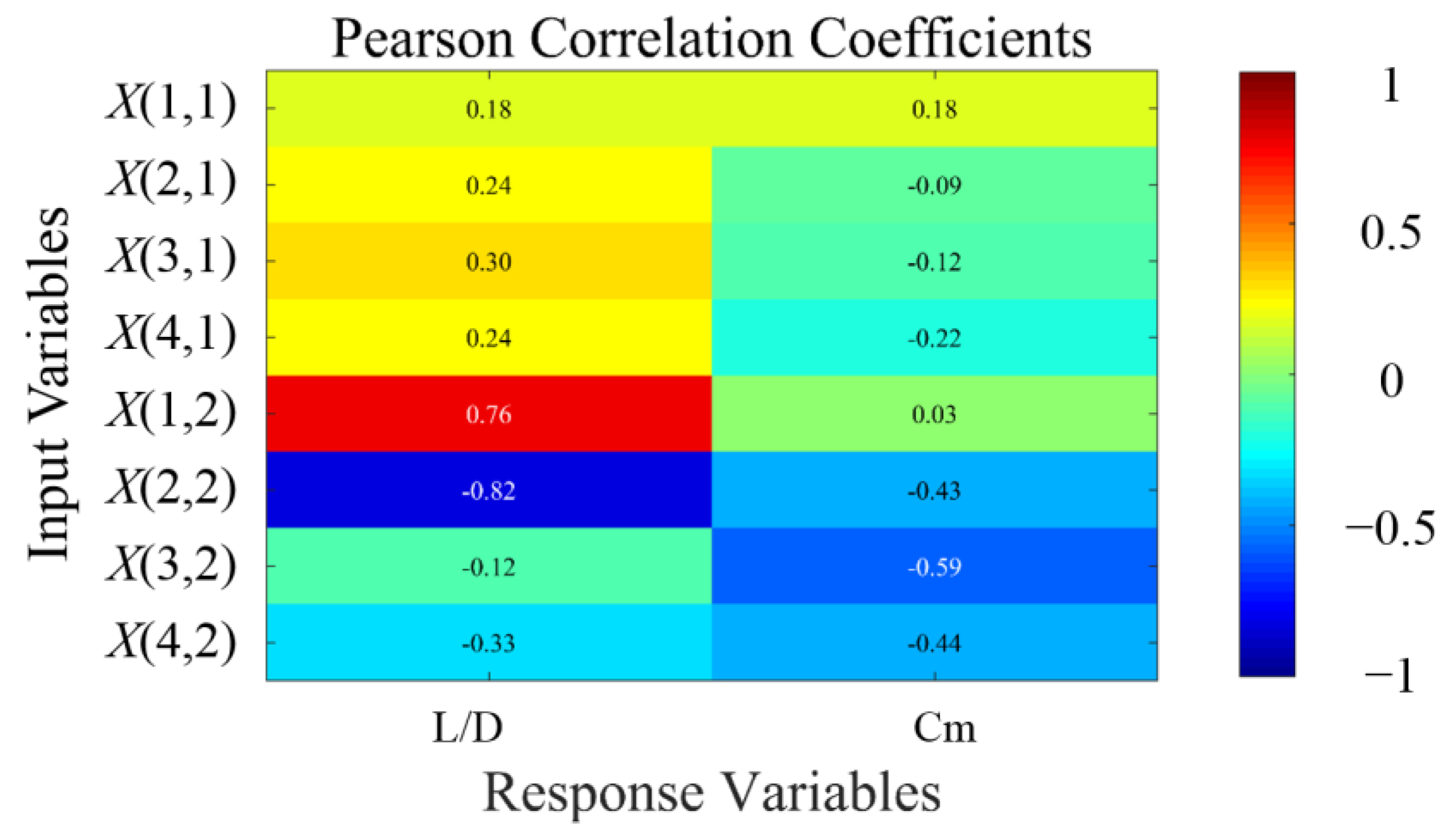
Based on the optimization results, the Pearson heatmap from independent variables to dependent variables is shown in
Figure 15. The Pearson correlation coefficient analysis is a statistical method used to measure the strength and direction of the linear relationship between two variables. The Pearson correlation coefficient heatmap provides an intuitive visualization of the correlations among multiple variables. The values of the correlation coefficients fall within the range of [−1, 1], where 1 indicates a perfect positive correlation; −1 indicates a perfect negative correlation; and 0 indicates no linear relationship. The formula for calculating the Pearson correlation coefficient is as follows:
Here,
and
represent the observed values of the two variables;
and
are their respective means; and
is the number of observations.
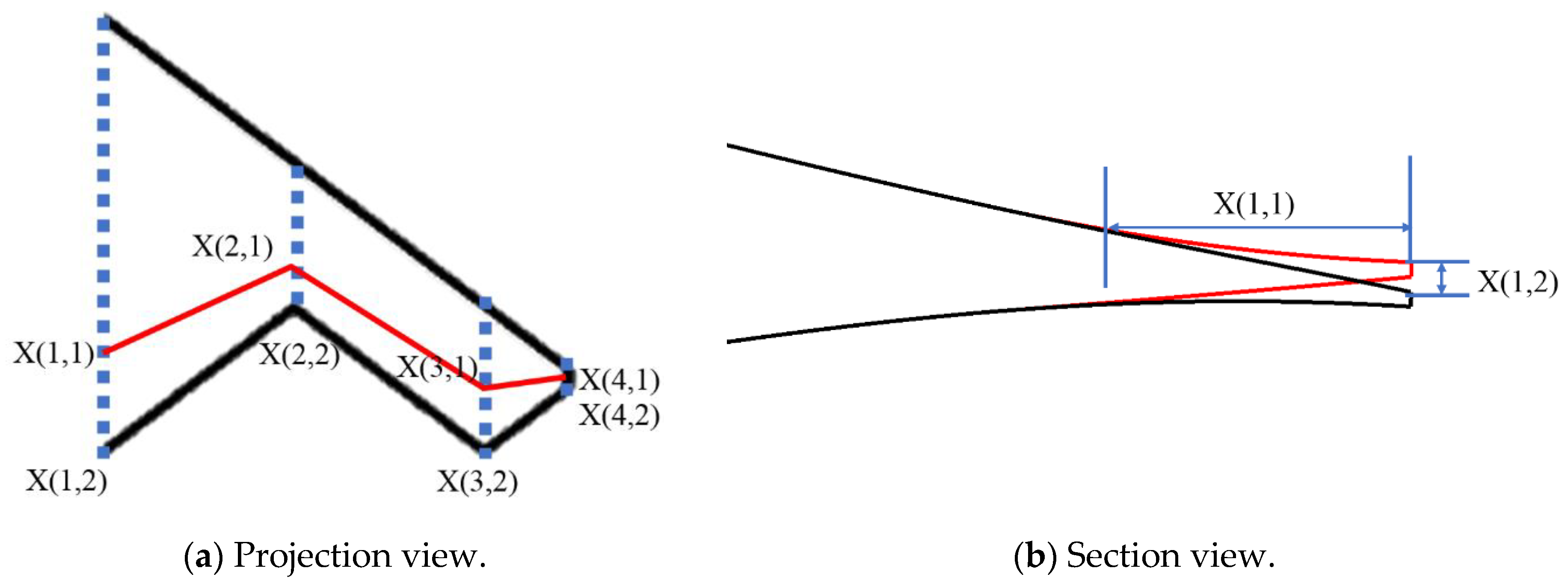
The Pearson correlation coefficient heatmap clearly shows that the two parameters with the greatest influence on the lift-to-drag ratio are X(1,2) and X(2,2), located near the trailing edge close to the wing root. Their correlation coefficients are 0.76 and −0.82, respectively. This indicates that a higher lift-to-drag ratio configuration tends to have more unloading at the trailing edge near the wing root and less unloading in the mid-wing section, with a lower correlation between the wingtip and the lift-to-drag ratio.
Additionally, the heatmap reveals that the parameter with the most significant influence on the cruising pitching moment coefficient is X(3,2) at the third section of the wingtip, with a correlation coefficient of −0.59. Parameters with a moderate influence are X(2,2) and X(4,2), with correlation coefficients of −0.43 and −0.44, respectively. This proves that a lower cruising trim moment means higher unloading at the wingtip. However, it is important to note that in this optimization model, the absolute value of the pitching moment coefficient was used. This means that some models with excessive unloading at the trailing edge were identified as having a high pitching moment coefficient. In other words, due to the absolute value, the moment coefficient appears reduced, suggesting that the actual influence of trailing-edge twist on the trim moment should be higher.
The Pearson correlation coefficient heatmap for the independent variables, as shown in
Figure 16, better reflects the coupling correlations between them. Since all correlation coefficients are below 0.5, it can be concluded that the coupling between each pair of parameters is relatively low. The highest correlations are between X(2,2) and X(1,2), and between X(2,2) and X(4,2). This indicates that the linkage between the upward displacement at
Section 1,
Section 2 and
Section 4 is relatively high, while the linkage with
Section 3 is lower. The correlations for the start point of the trailing-edge twist are all at low levels, indicating that the start point of the trailing-edge twist has a minimal influence on the section geometry. Instead, it is primarily the upward displacement that affects the unloading force at the trailing edge.
For the aerodynamic analysis of the trim problem, the most critical factor is the pitching moment coefficient. The distribution of pitching moment coefficients at each section of Model1, with the center of gravity as the reference point, is shown in
Figure 17. Due to the influence of the area distribution of the Lambda wing, the inner wing section is positioned more forward and inward, thus providing a pitch-up moment. Conversely, the outer wing section extends outward and rearward along the span, gradually providing a pitch-down moment. However, it can be observed that the pitch-up moment in the inner wing section is not linearly distributed, especially near the wing root, where there are fluctuations in the moment provided. Similarly, near the second segment transition at the wingtip, there is also a non-linear characteristic.
The inner wing section provides a pitch-up moment, while the outer wing section provides a pitch-down moment. At the wingtip, the pitch-up moment significantly decreases, which is influenced by the chord length reduction at the outermost part. Nonetheless, this shows that the pitching moment coefficients of each section are not entirely linearly distributed with the wing area and position. Otherwise, the spanwise position from the transition point (1.05 m) to the wingtip (3.4 m) would be expected to show a linear distribution. Comparing the optimized moment coefficients, there is a significant increase in the pitch-up moment at both the wing root and wingtip. The previously fluctuating characteristic of the root pitching moment is mitigated, which aligns with the notable features of X(1,2) and X(3,2) in the optimization results. Between the second and third sections of the outer wing, the moment changes are minimal.
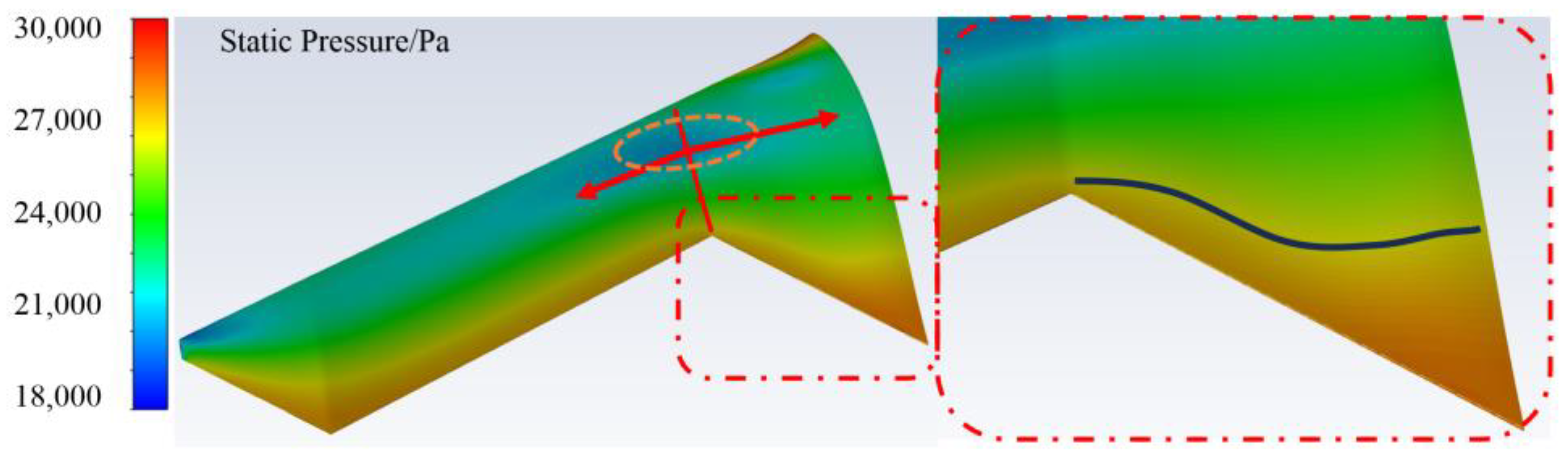
Observing the pressure contour of Model1 in
Figure 18, it is clear that the pressure distribution at the trailing edge of the inner wing section aligns with the local fluctuations in the moment curve at the wing root. This characteristic is related to the previously mentioned trend of trailing-edge flow moving toward the wing root. This flow trend becomes more pronounced as the angle of attack increases. Additionally, the pressure contour shows a low-pressure point at the 40% chord line of the transition section. This point extends into an elliptical region both inward and outward, providing suction (the red arrows show the tendency direction). This suction region generates a pitch-up moment but has a weak influence on the wing root, leading to slight fluctuations in the moment coefficient at the root. The elliptical shape of this region also results in the non-linear characteristics of the moment coefficient provided by the outer wing section.
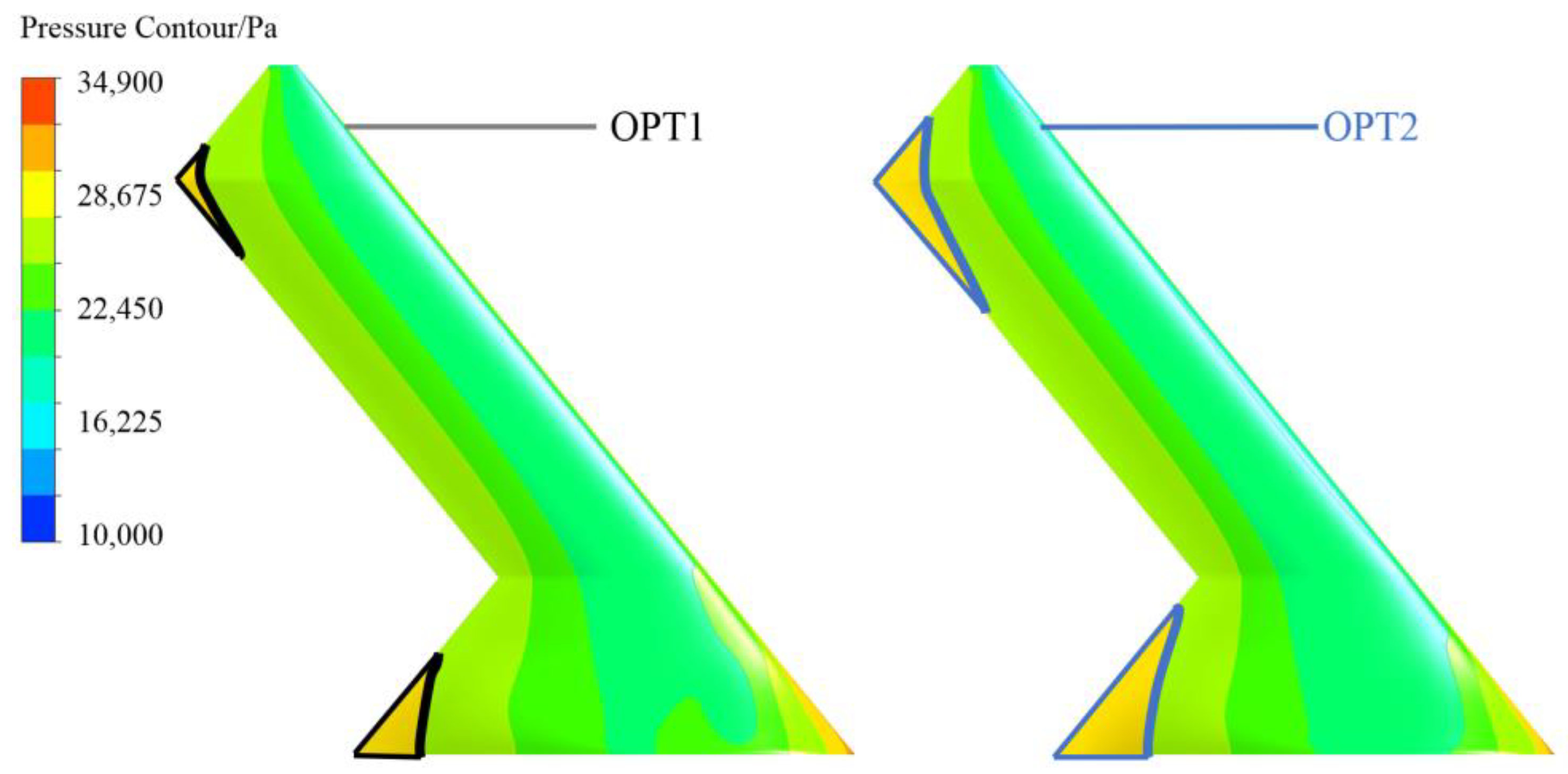
Comparing the optimized results, the surface pressure distribution is shown in
Figure 19. The figure shows that the trailing-edge unloading forces are distributed in the regions between the wing root and the second section. This distribution aligns with the characteristics of the moment coefficient decomposition. Specifically, the part of the inner wing near the wing root matches the calculations in
Figure 17. In Model1, the moment coefficient at the root exhibits some fluctuation along the spanwise distribution, whereas in the optimized model, the moment coefficient at the root shows a more uniform spanwise distribution.
Figure 19 also clearly shows an increase in the trailing-edge unloading area, which in turn increases the root moment coefficient. The characteristics at the wingtip are similar, with a significant increase in the trailing-edge unloading force at the third section, consistent with the features in the moment curve of
Figure 17. Additionally, the pressure distribution at the leading edge varies between the two models due to differences in trim angles.
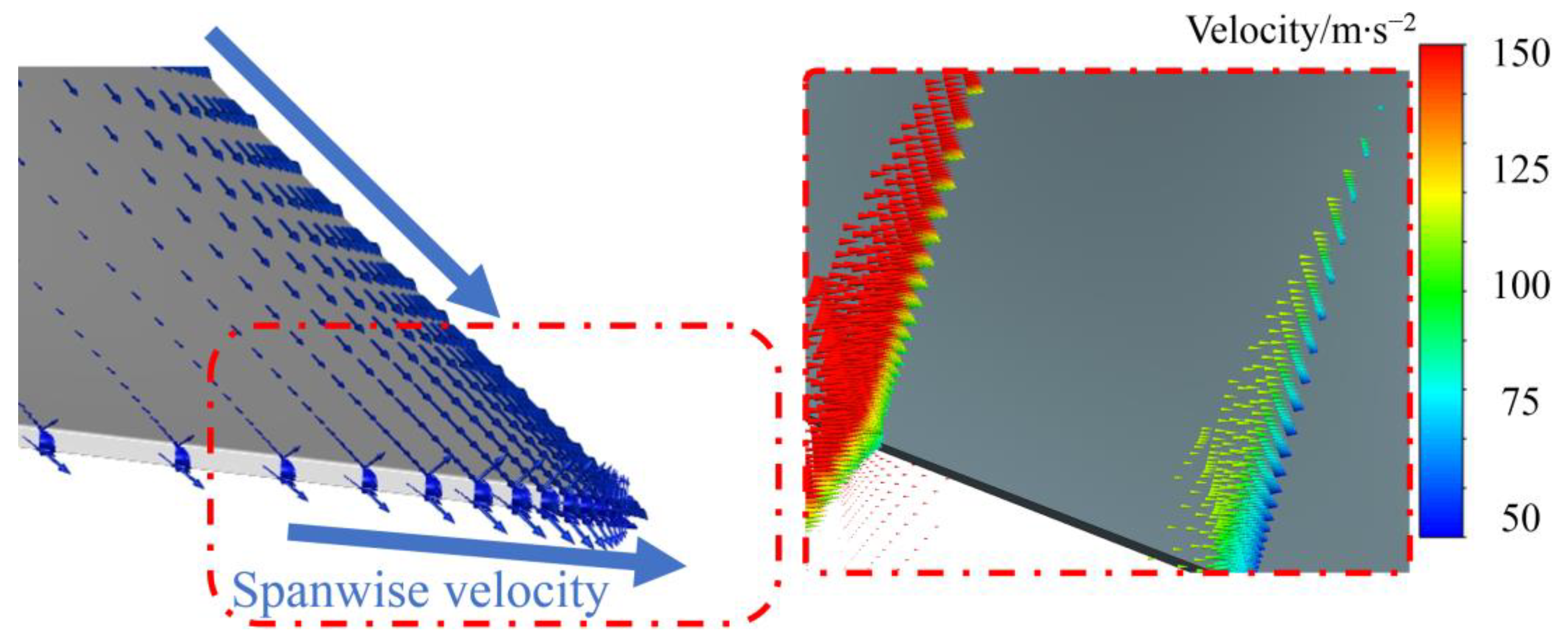
Observing the velocity characteristics in
Figure 20, the velocity vectors near the trailing edge of the inner wing comprise a combination of two sets of vectors: one in the direction of the incoming flow and one toward the wing root. The speed in the direction of the incoming flow remains relatively constant because there is almost no separation on the upper wing surface. However, due to the Lambda configuration, there are two sets of spanwise velocities at the trailing edge starting from the second section, moving toward both the root and the third section, with the speed reaching its minimum at the root and the third section. The angle between this spanwise velocity and the incoming flow velocity is acute, meaning that this spanwise velocity accelerates the incoming flow velocity. This results in lower speeds near the root section and the third section compared to other trailing-edge locations during the optimization process, leading to greater trailing-edge unloading forces. This is consistent with the previously mentioned areas that primarily provide trailing-edge unloading forces.
The comparison of lift coefficients in
Figure 21 clearly shows that Model1 exhibits a steep drop in lift at the second and third sections. This is an unavoidable characteristic of Lambda-wing design combined with the identical airfoil across the entire wing due to its area rule variations along the spanwise direction. However, the OPT model shows significant changes in lift distribution at the first, second and third sections. The optimized lift distribution becomes more elliptical, which is the main reason for the lower loss in lift-to-drag characteristics after trimming the moment.
Furthermore, observing the drag coefficient, there is an increase in drag around the second section and a decrease around the third section. This corresponds to changes in the lift coefficient and can be considered as variations in the induced drag, having a minimal influence on the overall lift-to-drag ratio. The reduction in lift at the root while maintaining nearly constant drag can be seen as changes in spanwise flow at the root affecting the lift-to-drag ratio. These results are consistent with findings from the Pearson correlation coefficient analysis.
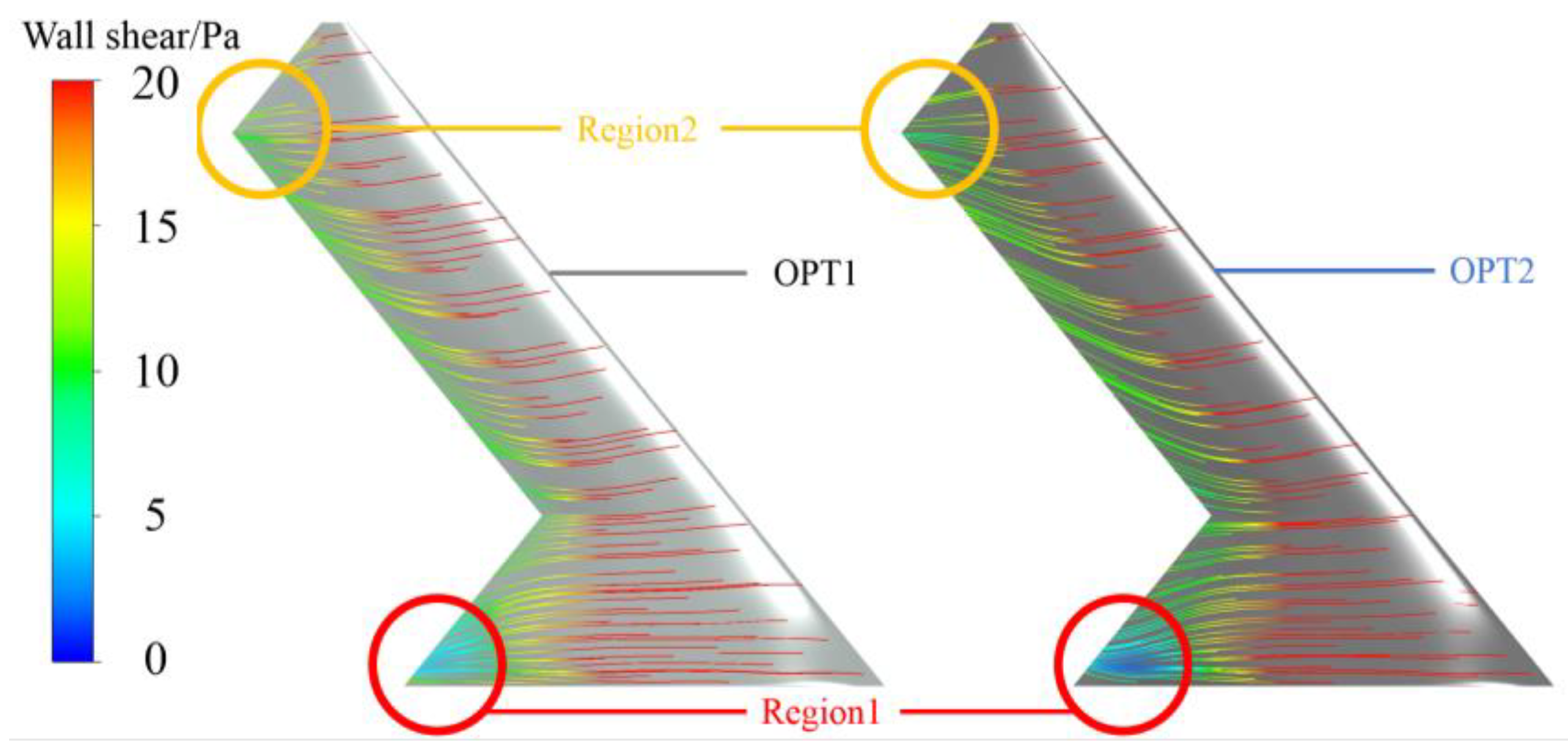
Observing the shear stress streamlines in
Figure 22, there is a clear trend of spanwise flow toward the root at the trailing edge. In the initial Model1, this flow starts at the second section and moves toward the root, where it tends to dissipate. In contrast, the OPT model shows a noticeable directional adjustment of this flow near the root (Region1 in
Figure 22), reversing the spanwise flow direction before it reaches the root. This change is due to the upward displacement of the trailing edge at the root, making it more difficult for the flow to move toward the root. Similar flow changes also appeared in the third section of the wingtip (Region2 in
Figure 22). This positional adjustment corresponds to changes in the lift and drag coefficients near the root. The streamline patterns demonstrate that when trimming the optimized model based on Model1, using a trailing-edge twist model can effectively reduce the additional drag generated by aerodynamic forces. It also keeps the added pitch-up moment within a limited range, thereby ensuring the aerodynamic efficiency of the trimmed model.
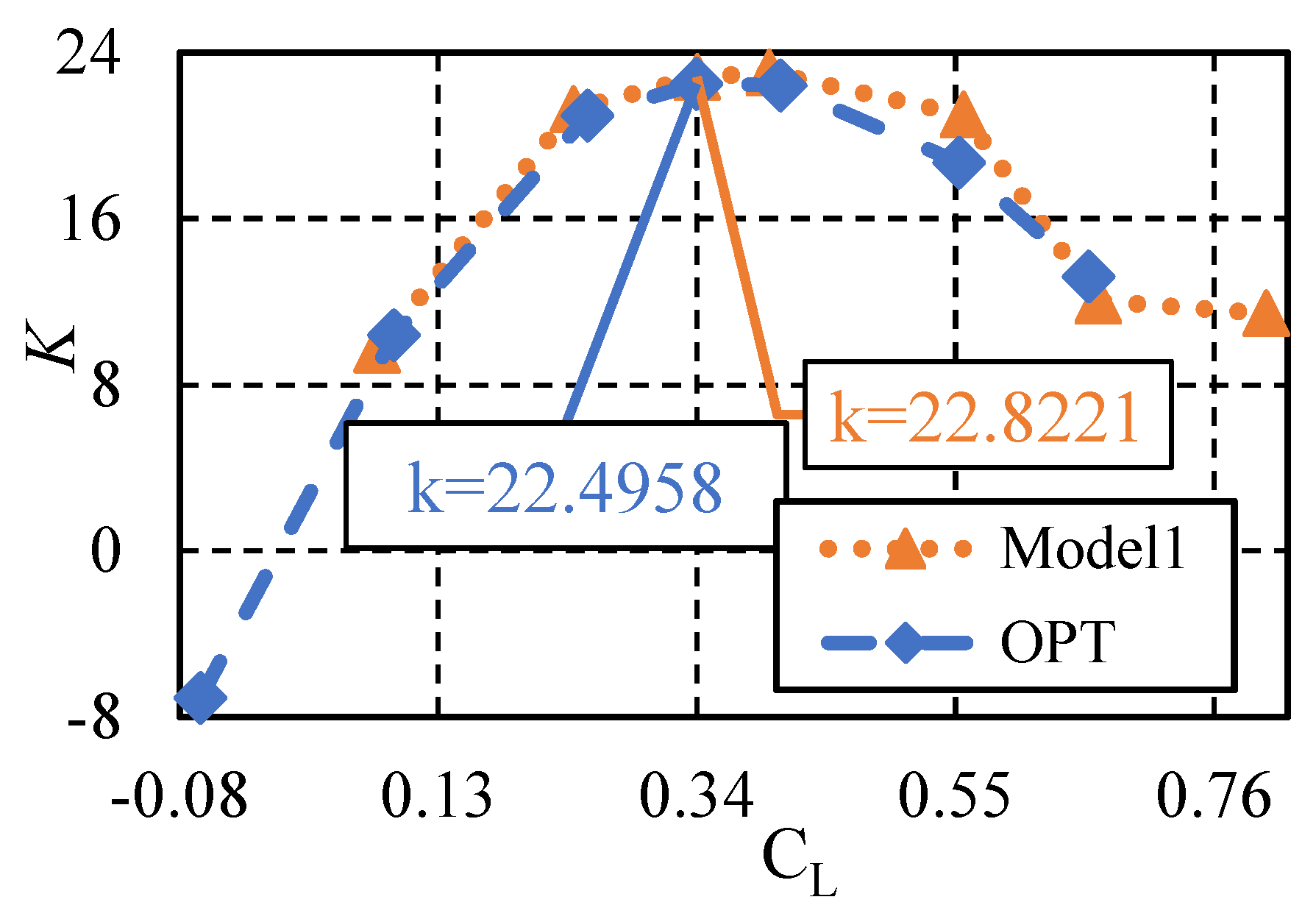
Previous analyses focused on the state of the cruising lift coefficient.
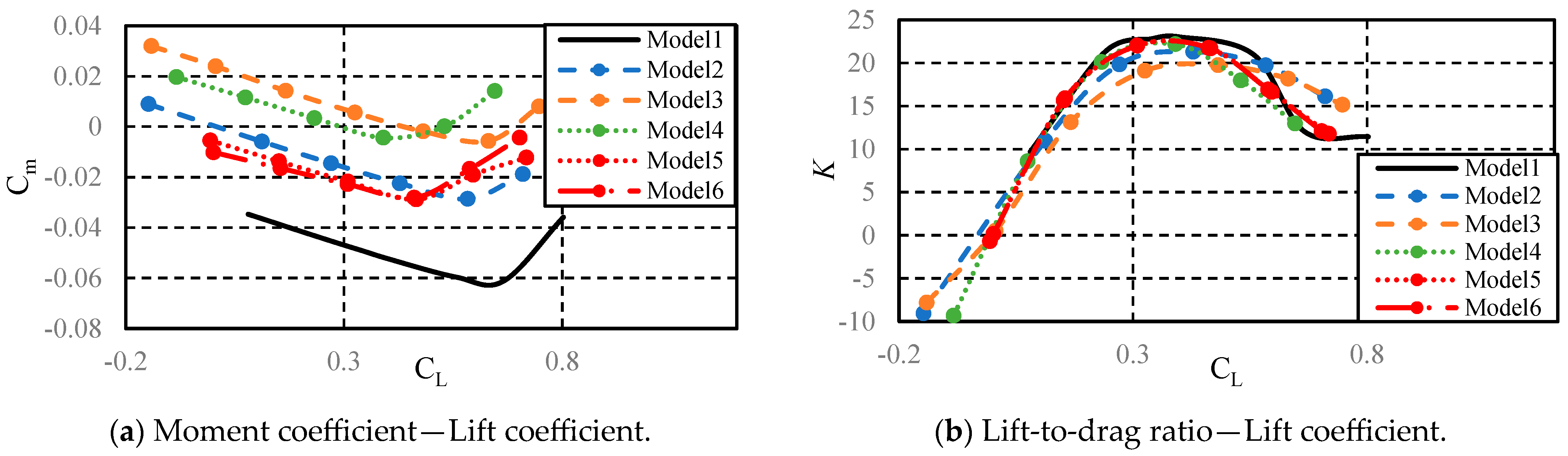
Figure 23 compares the lift-to-drag characteristics at different angles of attack. The x-axis is represented by the lift coefficient rather than the angle of attack. This change is due to the significant variations in lift coefficients at the same angle of attack when addressing trim problems. Therefore, using the angle of attack as the x-axis would not provide a meaningful reference. This shows that the changes in the lift-to-drag ratio are minimal at low angles of attack. At high angles of attack and high lift coefficients, there is a slight decrease in the lift-to-drag ratio, but the decrease is within an acceptable range. The change in the lift-to-drag ratio near the cruising lift coefficient is within 3%, which is also within an acceptable range. This indicates that this method is far superior to the wingtip twist method in terms of lift-to-drag characteristics.
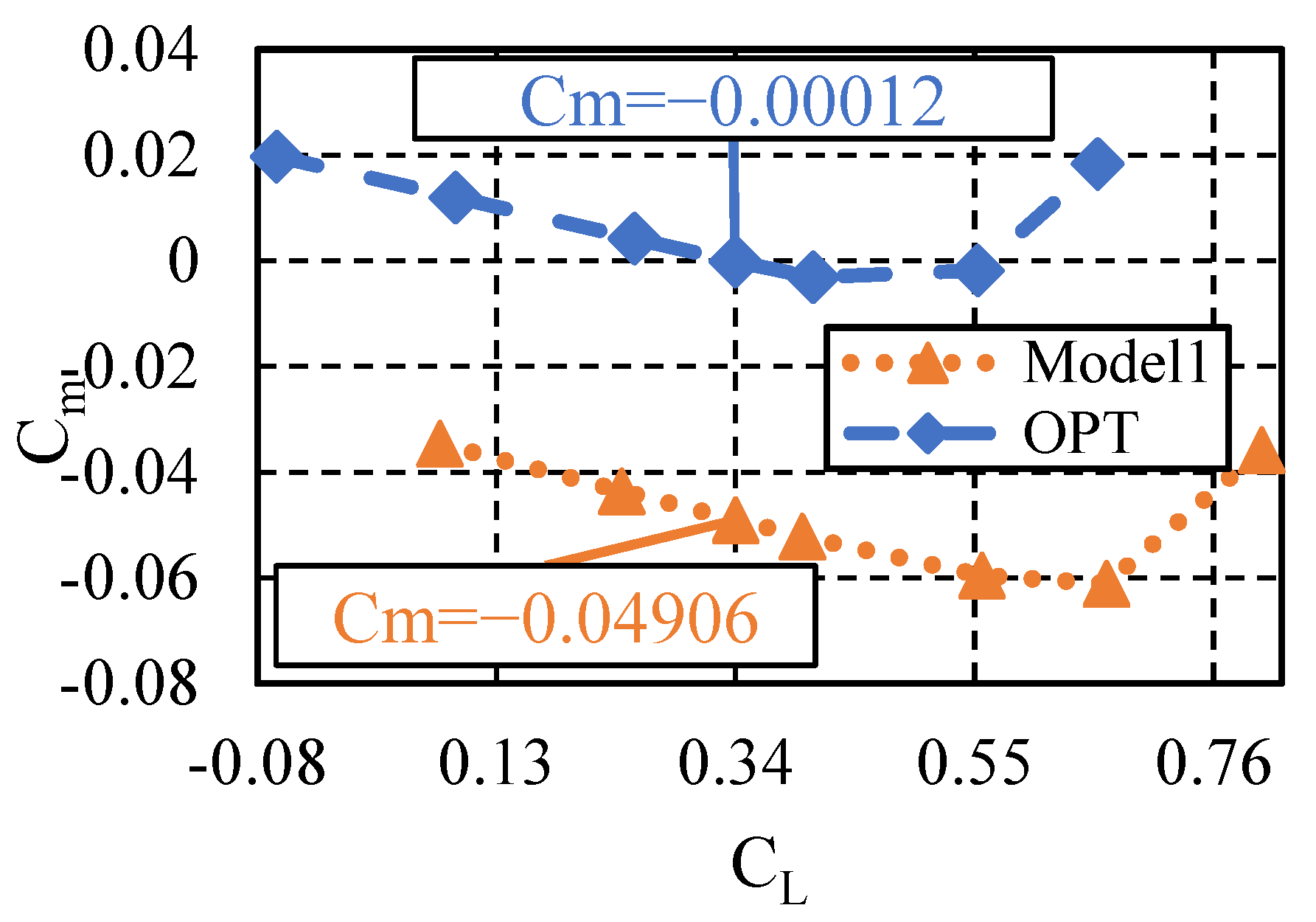
Observing the pitching moment coefficient versus lift coefficient curve in
Figure 24, the slope shows minimal variation in the low lift coefficient range, with the static stability margin increasing from 4.4% to 4.9%. The static stability margin is the longitudinal distance between the center of gravity and the aerodynamic center of lift increment, expressed as a fraction of the mean aerodynamic chord, indicating the aircraft’s inherent tendency to return to equilibrium after a disturbance. This phenomenon demonstrates that the aerodynamic center of lift increment in the optimized model shifts forward. The required longitudinal trim moment for cruising conditions significantly decreases from 4.9 × 10
−2 to 1.2 × 10
−4, a value small enough to make the drag loss associated with trim surfaces negligible.
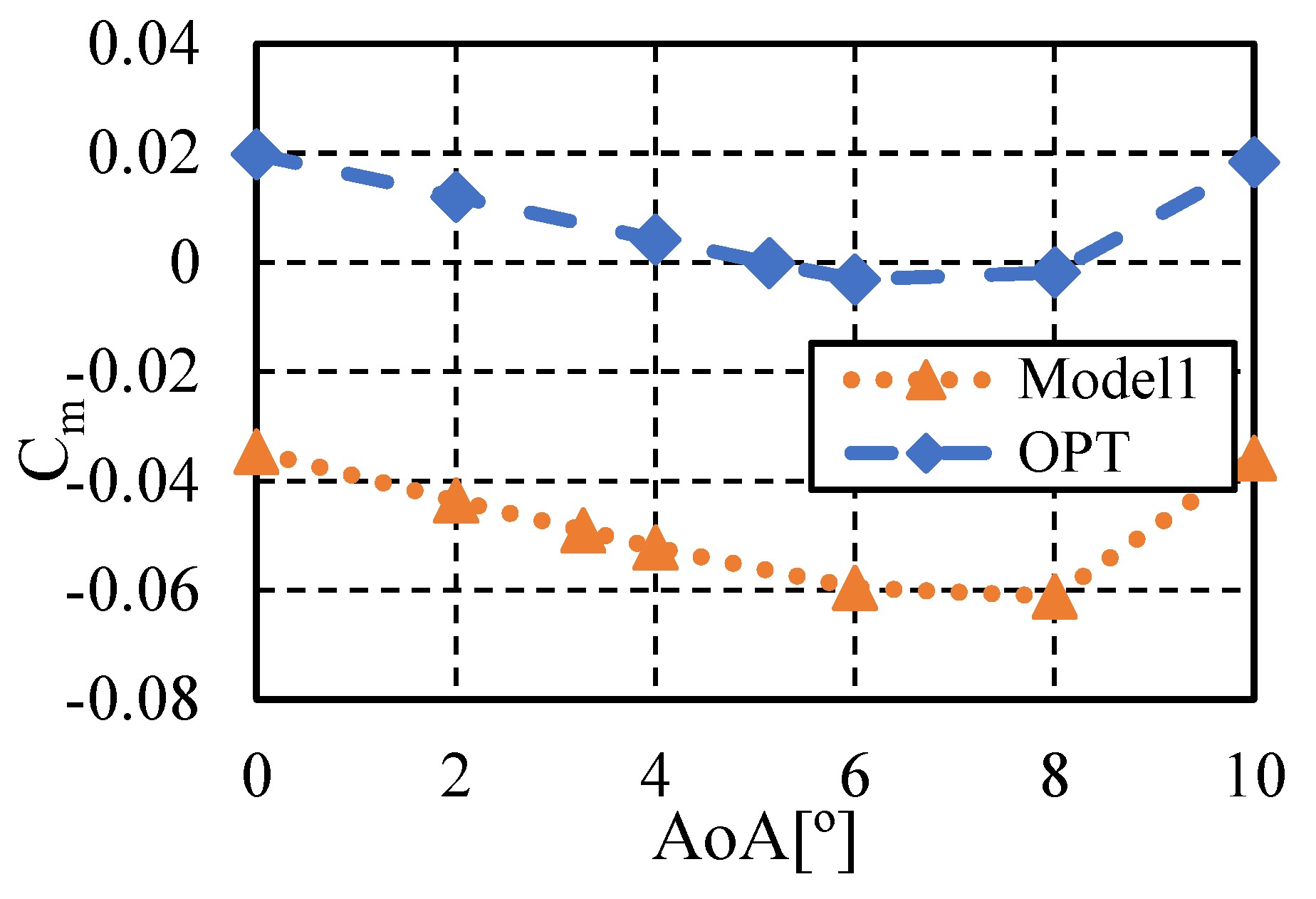
In the optimized model, the reduction in trailing-edge lift leads to a lower lift coefficient, which results in an increased trim angle of attack. Where separation is closely related to leading edge performance, the front edge design of the OPT model remains unchanged. However, with a lower lift coefficient at the same angle of attack, the starting lift coefficient for the static instability region decreases. The region is inevitable in Lambda-wing configurations [
23]. This characteristic can be further examined in the moment coefficient versus angle of attack curve shown in
Figure 25.
Based on the above analysis, the following conclusions can be drawn: The trailing-edge twist optimization model, after being refined by the optimization algorithm, excels in locally increasing trailing-edge unloading forces. It confines the reduction in lift-to-drag ratio caused by trailing-edge unloading to a small area, thereby having minimal influence on the overall lift-to-drag characteristics during wing trimming.
In terms of multi-angle lift-to-drag performance, the trailing-edge twist optimization model exhibits minimal lift-to-drag ratio loss for the same lift coefficient, showing a significant advantage, especially in the low lift coefficient range. However, due to the model’s inherent principles and the unchanged leading edge, the trailing-edge twist optimization model causes the static instability region at high angles of attack to appear at the same angle of attack as before, leading to an earlier onset of static instability. This characteristic is less favorable for high lift coefficient flight operations. Therefore, this model is more suitable for UAVs designed for long-duration, low lift coefficient cruising.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}