
Stochastic Planning of Synergetic Conventional Vehicle and UAV Delivery Operations


Abstract
1. Background
2. Problem Description
2.1. Basic Problem and Assumptions
2.2. Description of Constraints
- -
- Operations involve a single CV departing from the CD. The CV is assumed to have sufficient capacity to carry all assigned parcels and UAV units.
- -
- UAVs are of the vertical take-off and landing (VTOL) type.
- -
- Each DL may be visited once for either direct delivery, UAV deployment, or both, although it remains accessible multiple times for routing purposes.
- -
- The CV tour begins and concludes with the CD.
- -
- The CV can serve multiple DLs in sequence.
- -
- Each UAV is restricted to transporting a single parcel per mission.
- -
- UAVs complete one outbound and one inbound trip per deployment cycle.
- -
- Multiple UAVs can be simultaneously deployed from a single point, following preparation.
- -
- UAVs must return to the same launch point after completing their delivery.
- -
- RDs can launch UAVs independently, without requiring the CV to remain onsite during their return, although a fixed trans-shipment time is incurred.
- -
- UAVs launched from the DL do not impose a waiting or trans-shipment time on the CV.
- -
- Each item is limited to a single transfer between vehicles throughout its journey.
2.3. Stochastic Conditions
2.3.1. Conventional Vehicle Network
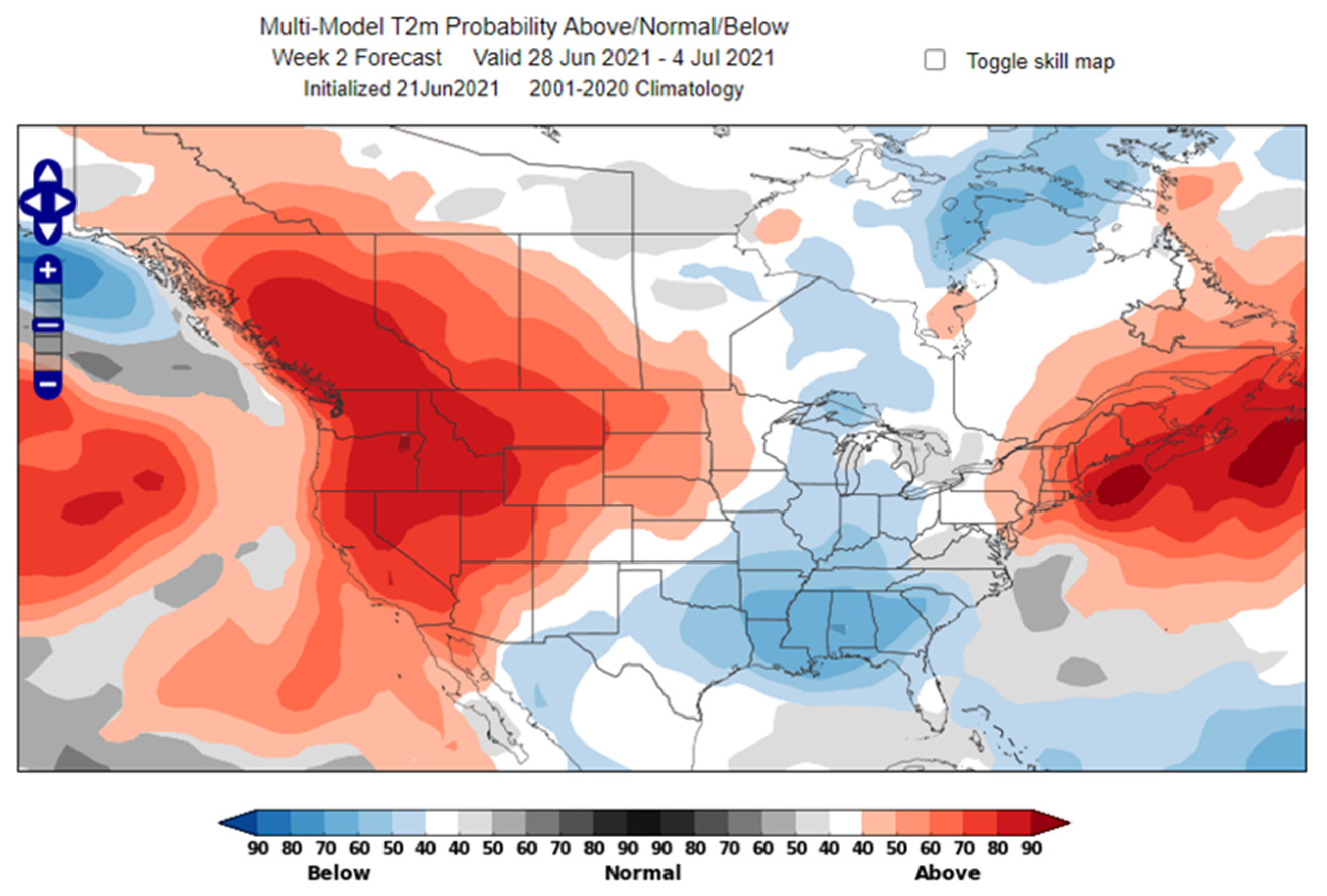
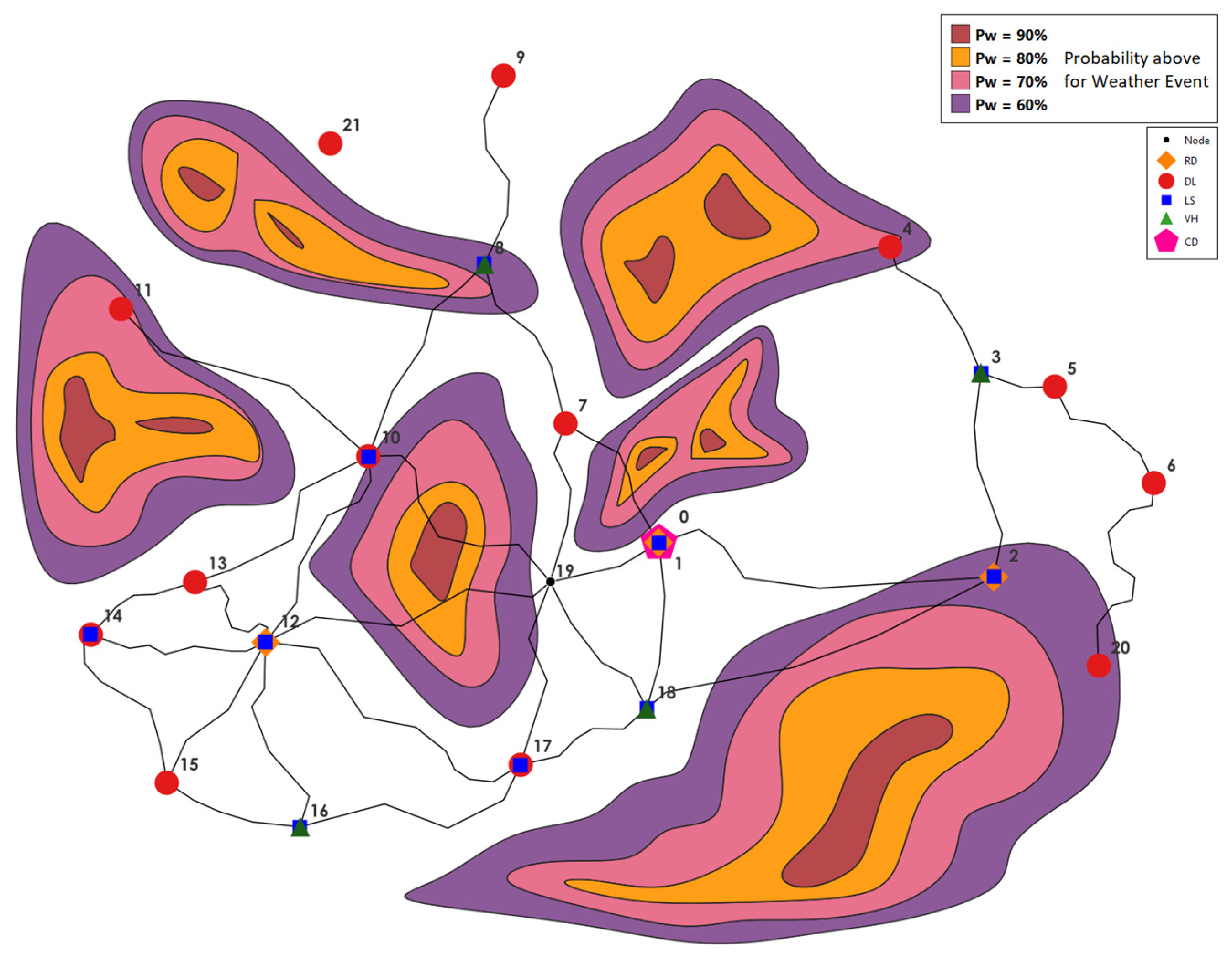
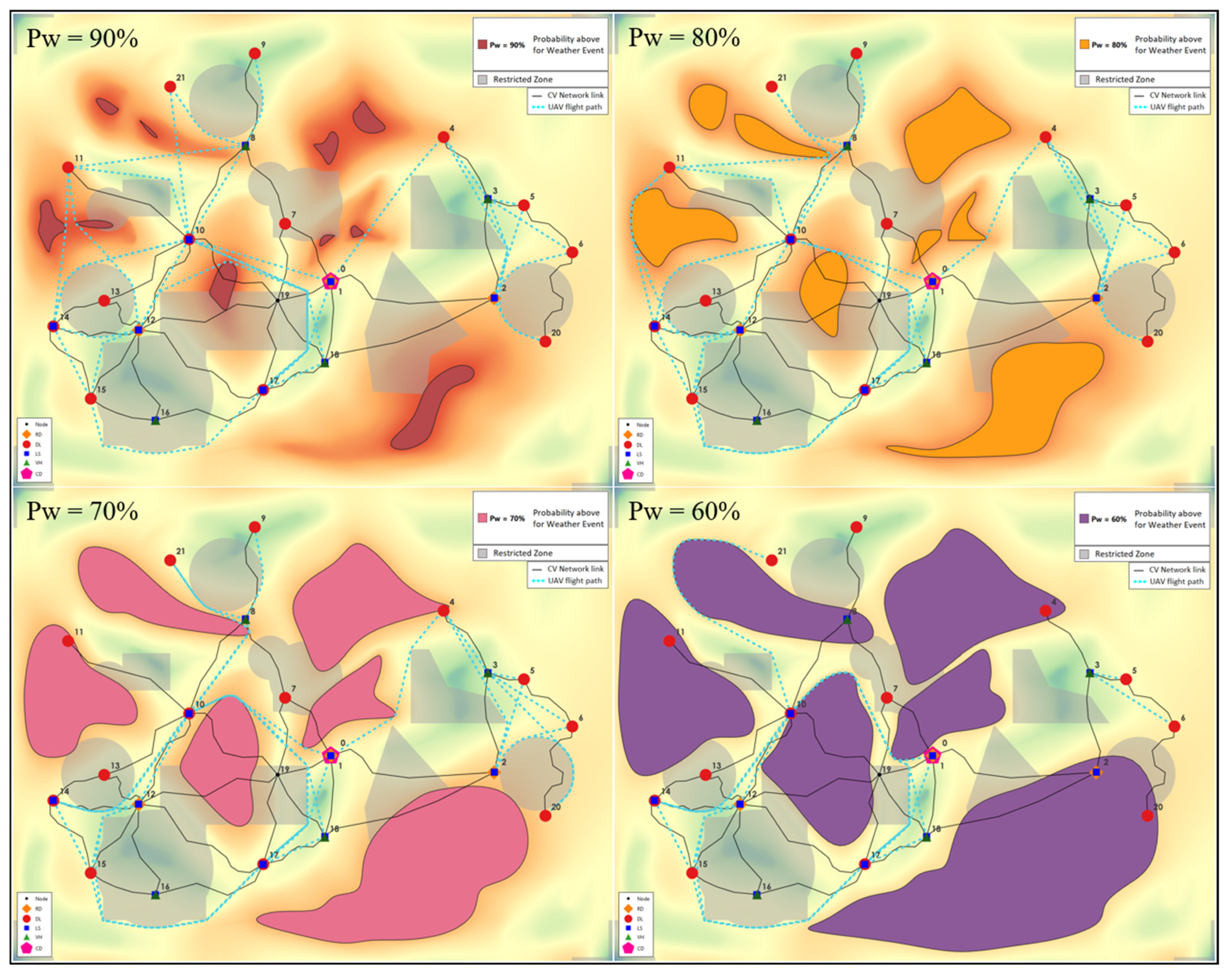
2.3.2. Weather Forecast
3. Methodology
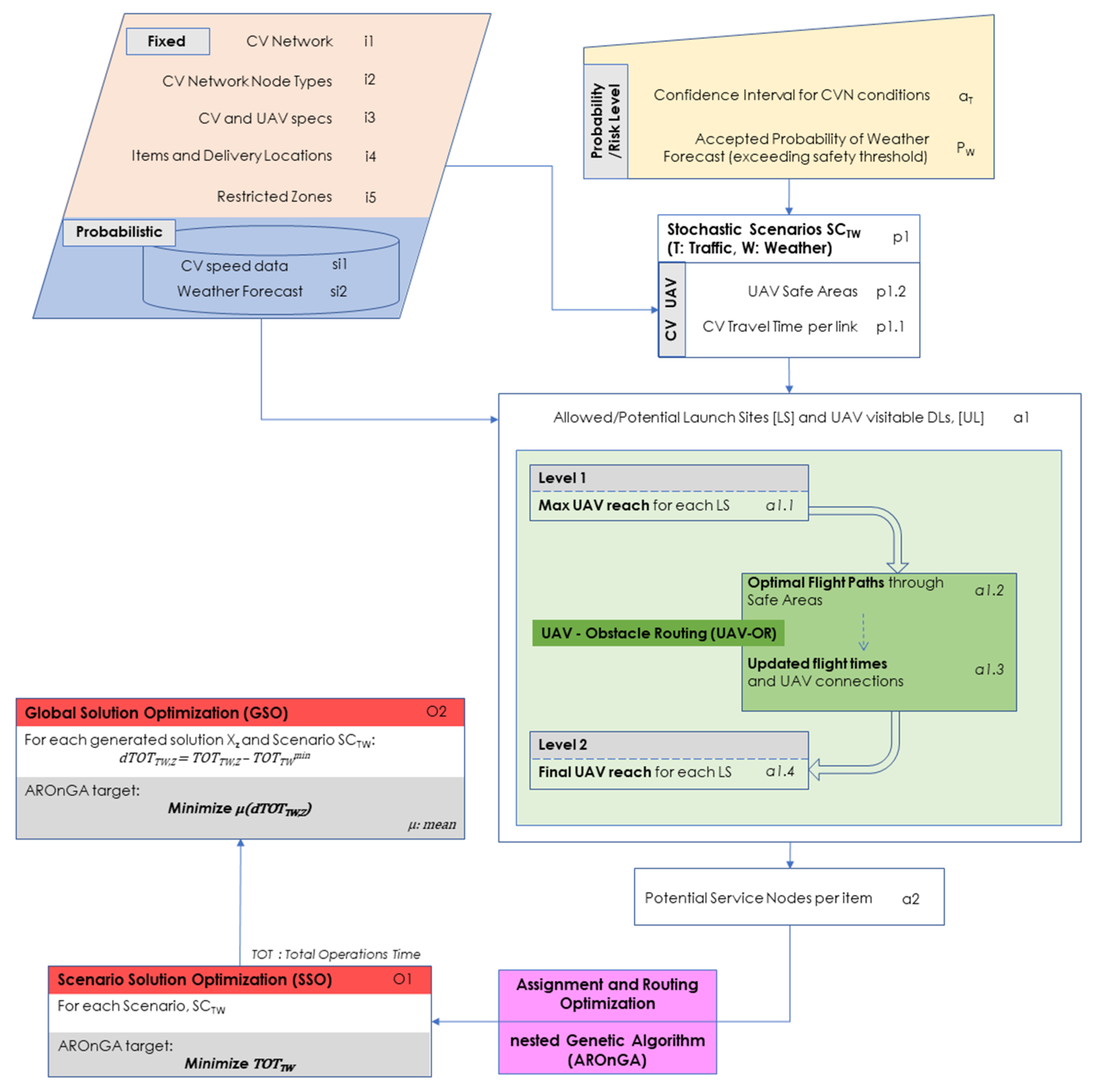
3.1. General Workflow
3.2. Solution Under Known Conditions (Scenario Solution Optimization—SSO)
3.3. Global Solution (Global Solution Optimization—GSO)
4. Application and Results
4.1. Case Study Setup
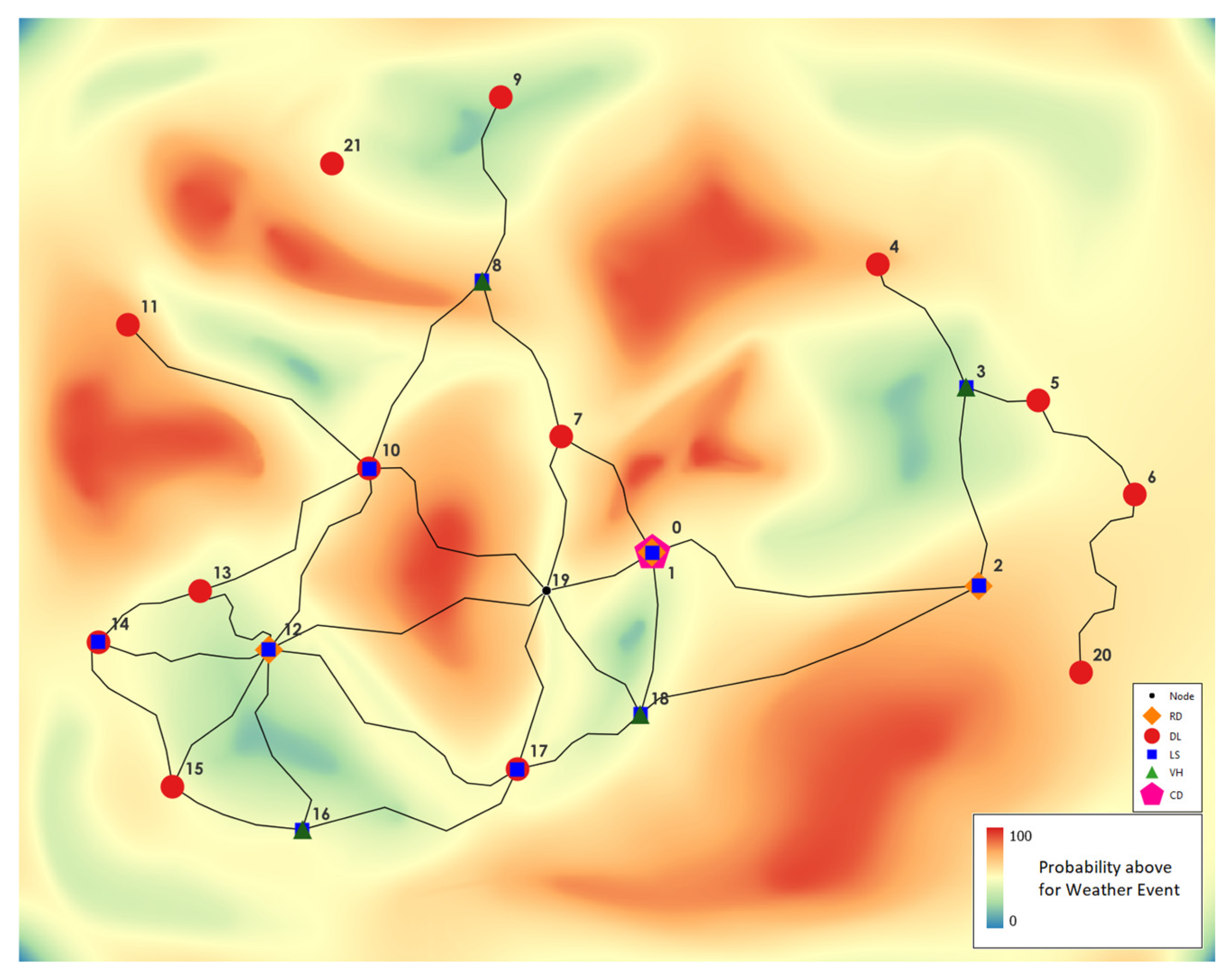
4.1.1. Network
4.1.2. Stochastic Traffic Conditions
4.1.3. Stochastic Weather Forecast
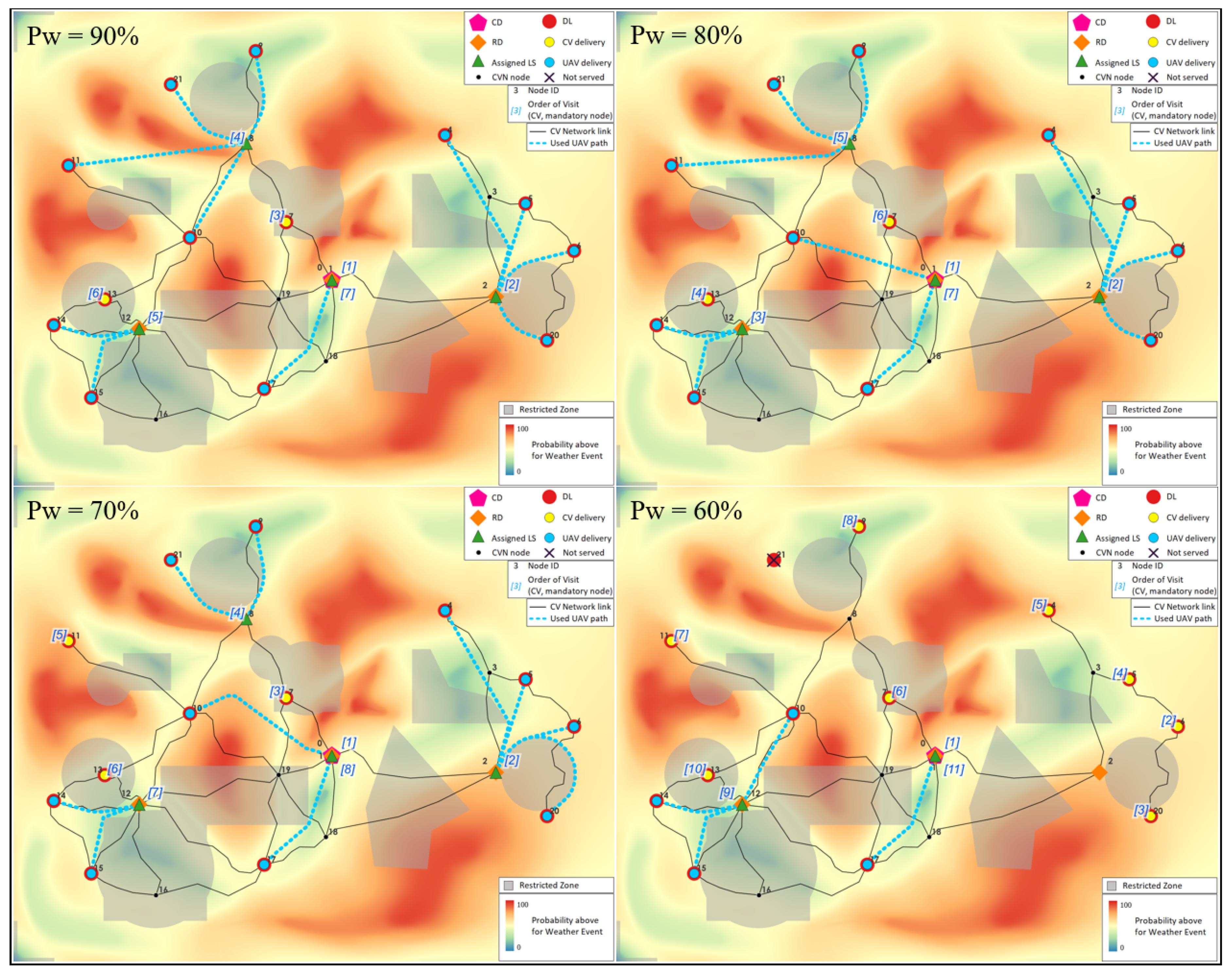
4.2. Experiments
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- ITF. Ready for Take Off? Integrating Drones into the Transport System; OECD Publishing: Paris, France, 2021. [Google Scholar]
- Davies, C. The Carbon Cost of Home Delivery and How to Avoid It. Horizon: The EU Research & Innovation Magazine, 17 February 2020. [Google Scholar]
- ICAO. Annex 2 to the Convention on Civil Aviation—Rules of the Air, 10th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2005. [Google Scholar]
- Murray, C.C.; Chu, A.G. The Flying Sidekick Traveling Salesman Problem: Optimization of Drone-Assisted Parcel Delivery. Transp. Res. Part C Emerg. Technol. 2015, 54, 86–109. [Google Scholar] [CrossRef]
- Moshref-Javadi, M.; Lee, S.; Winkenbach, M. Design and Evaluation of a Multi-Trip Delivery Model with Truck and Drones. Transp. Res. Part E Logist. Transp. Rev. 2020, 136, 101932. [Google Scholar] [CrossRef]
- Salama, M.R.; Srinivas, S. Collaborative Truck Multi-Drone Routing and Scheduling Problem: Package Delivery with Flexible Launch and Recovery Sites. Transp. Res. Part E Logist. Transp. Rev. 2022, 164, 102788. [Google Scholar] [CrossRef]
- Marinelli, M.; Caggiani, L.; Ottomanelli, M.; Dell’Orco, M. En Route Truck–Drone Parcel Delivery for Optimal Vehicle Routing Strategies. IET Intell. Transp. Syst. 2017, 12, 295–302. [Google Scholar] [CrossRef]
- Macrina, G.; Di Pugliese, L.; Guerriero, F.; Laporte, G. Drone-Aided Routing: A Literature Review. Transp. Res. Part C Emerg. Technol. 2020, 120, 102762. [Google Scholar] [CrossRef]
- Gendreau, M.; Laporte, G.; Séguin, R. Stochastic Vehicle Routing. Eur. J. Oper. Res. 1996, 88, 3–12. [Google Scholar] [CrossRef]
- Bertsimas, D.J.; Simchi-Levi, D. A New Generation of Vehicle Routing Research: Robust Algorithms Addressing Uncertainty. Oper. Res. 1996, 44, 286–304. [Google Scholar] [CrossRef]
- Wu, L.; Hifi, M. Discrete Scenario-Based Optimization for the Robust Vehicle Routing Problem: The Case of Time Windows under Delay Uncertainty. Comput. Ind. Eng. 2020, 145, 106491. [Google Scholar] [CrossRef]
- Kepaptsoglou, K.; Fountas, G.; Karlaftis, M.G. Weather Impact on Containership Routing in Closed Seas: A Chance-Constraint Optimization Approach. Transp. Res. Part C Emerg. Technol. 2015, 55, 139–155. [Google Scholar] [CrossRef]
- Zhan, W.; Wang, W.; Chen, N.; Wang, C. Efficient UAV Path Planning with Multiconstraints in a 3D Large Battlefield Environment. Math. Probl. Eng. 2014, 2014, 597092. [Google Scholar] [CrossRef]
- Zhang, M.; Su, C.; Liu, Y.; Hu, M.; Zhu, Y. Unmanned Aerial Vehicle Route Planning in the Presence of a Threat Environment Based on a Virtual Globe Platform. ISPRS Int. J. Geo-Inf. 2016, 5, 192. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, X.; Wang, J.; Liu, Y. Truck-Drone Delivery Optimization Based on Multi-Agent Reinforcement Learning. Drones 2024, 8, 27. [Google Scholar] [CrossRef]
- Jeong, H.; Lee, D. Drone Routing Problem with Truck: Optimization and Quantitative Analysis. Expert Syst. Appl. 2023, 227, 120260. [Google Scholar] [CrossRef]
- Wang, S.; Zhao, Y. Optimal Delivery Route Planning for a Fleet of Heterogeneous Drones: A Rescheduling-Based Genetic Algorithm Approach. Comput. Ind. Eng. 2023, 179, 109179. [Google Scholar] [CrossRef]
- Joo, J.; Lee, C. A Branch-and-Price Algorithm for Robust Drone-Vehicle Routing Problem with Time Windows. Inf. J. Comput. 2025, 37, 1–15. [Google Scholar] [CrossRef]
- Tolooie, A.; Sinha, A.; Khosh Raftar Nouri, A. Heuristic Approach for Optimizing Reliable Supply Chain Network Using Drones in Last-Mile Delivery under Uncertainty. Int. J. Syst. Sci. Oper. Logist. 2024, 11, 2301610. [Google Scholar]
- Deng, M.; Li, Y.; Ding, J.; Zhou, Y.; Zhang, L. Stochastic and Robust Truck-and-Drone Routing Problems with Deadlines: A Benders Decomposition Approach. Transp. Res. Part E Logist. Transp. Rev. 2024, 190, 103709. [Google Scholar] [CrossRef]
- Wei, S.; Fan, H.; Ren, X.; Diao, X. Time-Dependent Vehicle Routing Problem with Drones under Vehicle-Restricted Zones and No-Fly Zones. Appl. Sci. 2025, 15, 2207. [Google Scholar] [CrossRef]
- Mahmoodi, A.; Sajadi, S.M.; Sadeq, A.M.; Narenji, M.; Eshaghi, M.; Jasemi, M. Enhancing Unmanned Aerial Vehicles Logistics for Dynamic Delivery: A Hybrid Non-Dominated Sorting Genetic Algorithm II with Bayesian Belief Networks. Ann. Oper. Res. 2025, 325, 123–145. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Liu, Q.; Chen, H. Exact Solution of the Vehicle Routing Problem with Drones. Transp. Sci. 2024, 58, 345–362. [Google Scholar]
- Wang, W.; Zhang, M.; Beech, E.; Majumdar, A.; Ochieng, W.; Escribano, J. Risk-Based Truck-Drone Delivery Optimization. In Proceedings of the TRISTAN XII: Triennial Symposium on Transportation Analysis, Okinawa, Japan, 22–27 June 2025; pp. 163–170. [Google Scholar]
- Gonzalez-R, P.L.; Canca, D.; Andrade-Pineda, J.L.; Calle, M.; Leon-Blanco, J.M. Truck-Drone Team Logistics: A Heuristic Approach to Multi-Drop Route Planning. Transp. Res. Part C Emerg. Technol. 2020, 114, 657–680. [Google Scholar] [CrossRef]
- Doswell, C.; Brooks, H. NOAA National Severe Storms Laboratory. Available online: https://www.nssl.noaa.gov/users/brooks/public_html/prob/Probability.html (accessed on 21 March 2023).
- World Climate Service. WCS Blog—Analysis from the World Climate Service. Available online: https://www.worldclimateservice.com/2021/09/08/probability-forecast/ (accessed on 21 March 2023).
- Kouretas, K.; Kepaptsoglou, K. Planning Integrated Unmanned Aerial Vehicle and Conventional Vehicle Delivery Operations under Restricted Airspace: A Mixed Nested Genetic Algorithm and Geographic Information System-Assisted Optimization Approach. Vehicles 2023, 5, 1060–1086. [Google Scholar] [CrossRef]
- ESRI. Flow Direction. Available online: https://desktop.arcgis.com/en/arcmap/latest/tools/spatial-analyst-toolbox/flow-direction.htm (accessed on 25 June 2023).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Seed | TOTTWmin (s) | |||
|---|---|---|---|---|
| No | Pw = 90% | Pw = 80% | Pw = 70% | Pw = 60% |
| 1 | 17,254.37 | 17,357.06 | 19,313.74 | 30,026.49 |
| 2 | 17,037.6 | 17,080.29 | 19,140.06 | 31,269.8 |
| 3 | 17,304.48 | 17,107.17 | 17,898.02 | 32,118.2 |
| 4 | 17,183.86 | 17,424.87 | 18,850.66 | 34,445.35 |
| 5 | 17,091.02 | 17,267.28 | 18,094.89 | 31,162.95 |
| 6 | 17,051.6 | 17,154.29 | 19,041.81 | 32,444.25 |
| 7 | 16,967.73 | 17,010.42 | 17,817.36 | 32,888.2 |
| 8 | 16,929.83 | 17,032.52 | 18,068.75 | 31,419.5 |
| 9 | 17,050.81 | 17,265.72 | 18,392.34 | 30,918.41 |
| 10 | 17,111.56 | 17,154.25 | 17,941.08 | 32,869.8 |
| 11 | 17,117.87 | 18,572.03 | 18,078.14 | 31,771.98 |
| 12 | 17,396.54 | 17,458.39 | 18,713.29 | 31,408.95 |
| 13 | 17,331.62 | 17,912.38 | 18,089.26 | 32,704.41 |
| 14 | 16,813.96 | 16,856.65 | 17,575.38 | 32,269.08 |
| 15 | 16,836.18 | 16,998.86 | 17,675.42 | 32,363.35 |
| 16 | 17,297.96 | 17,661.77 | 18,808.39 | 32,273.38 |
| 17 | 16,982.43 | 17,223.15 | 17,891.34 | 33,134.36 |
| 18 | 17,134.69 | 17,237.38 | 18,024.82 | 31,774.46 |
| 19 | 16,910.51 | 17,256.32 | 18,232.15 | 31,178.88 |
| 20 | 17,592.35 | 17,635.04 | 18,374.9 | 33,814.77 |
| 21 | 17,178.89 | 17,281.58 | 18,013.08 | 31,477.1 |
| 22 | 17,192.75 | 17,454.72 | 19,359.49 | 34,143.58 |
| 23 | 17,118.12 | 17,111.2 | 18,009.42 | 32,080.94 |
| 24 | 16,839.37 | 16,942.06 | 18,012.9 | 32,377.86 |
| 25 | 17,226.31 | 17,089 | 18,752.7 | 31,549.68 |
| 26 | 16,986.16 | 17,200.96 | 17,928.83 | 32,702.52 |
| 27 | 17,473.45 | 17,516.14 | 18,069.77 | 30,442.2 |
| 28 | 17,271.92 | 17,330.34 | 18,093.73 | 32,777.06 |
| 29 | 17,288.01 | 18,362.71 | 18,763.22 | 33,741.98 |
| 30 | 17,064.99 | 17,107.68 | 17,979.79 | 31,751.01 |
| Item (k) | Node (dk) | Service Node Pool [SNk] | Service Node (lk) | Mode | Service Node Pool [SNk] | Service Node (lk) | Mode |
|---|---|---|---|---|---|---|---|
| Pw = 90% | Pw = 80% | ||||||
| 1 | 4 | [‘4’, ‘0’, ‘1’, ‘2’, ‘3’] | 2 | UAV | [‘4’, ‘2’, ‘3’] | 2 | UAV |
| 2 | 5 | [‘5’, ‘2’, ‘3’] | 2 | UAV | [‘5’, ‘2’, ‘3’] | 2 | UAV |
| 3 | 6 | [‘6’, ‘2’, ‘3’] | 2 | UAV | [‘6’, ‘2’, ‘3’] | 2 | UAV |
| 4 | 7 | [‘7’] | 7 | CV | [‘7’] | 7 | CV |
| 5 | 9 | [‘9’, ‘8’] | 8 | UAV | [‘9’, ‘8’] | 8 | UAV |
| 6 | 10 | [‘10’, ‘0’, ‘1’, ‘8’, ‘12’, ‘14’] | 8 | UAV | [‘10’, ‘0’, ‘1’, ‘8’, ‘12’, ‘14’] | 0 | UAV |
| 7 | 11 | [‘11’, ‘8’, ‘10’, ‘14’] | 8 | UAV | [‘11’, ‘8’, ‘10’, ‘14’] | 8 | UAV |
| 8 | 13 | [‘13’] | 13 | CV | [‘13’] | 13 | CV |
| 9 | 14 | [‘14’, ‘10’, ‘12’] | 12 | UAV | [‘14’, ‘10’, ‘12’] | 12 | UAV |
| 10 | 15 | [‘15’, ‘12’, ‘14’] | 12 | UAV | [‘15’, ‘12’, ‘14’] | 12 | UAV |
| 11 | 17 | [‘17’, ‘0’, ‘1’, ‘18’] | 0 | UAV | [‘17’, ‘0’, ‘1’, ‘18’] | 0 | UAV |
| 12 | 20 | [‘20’, ‘2’, ‘3’] | 2 | UAV | [‘20’, ‘2’, ‘3’] | 2 | UAV |
| 13 | 21 | [‘8’, ‘10’] | 8 | UAV | [‘8’, ‘10’] | 8 | UAV |
| [‘0’, ‘2’, ‘7’, ‘8’, ‘12’, ‘13’] | [‘0’, ‘2’, ‘7’, ‘8’, ‘12’, ‘13’] | ||||||
| [‘0’, ‘2’, ‘7’, ‘8’, ‘12’, ‘13’, ‘1’] | [‘0’, ‘2’, ‘12’, ‘13’, ‘8’, ‘7’, ‘1’] | ||||||
| [(‘0’, ‘2’), (‘2’, ‘7’), (‘7’, ‘8’), (‘8’, ‘12’), (‘12’, ‘13’), (‘13’, ‘1’)] | [(‘0’, ‘2’), (‘2’, ‘12’), (‘12’, ‘13’), (‘13’, ‘8’), (‘8’, ‘7’), (‘7’, ‘1’)] | ||||||
| Mean dTOT | 332.7 s/5.5 min | 168.2 s/2.8 min | |||||
| 17,134.6 s/285.6 min | 17,335.4 s/288.9 min | ||||||
| 280.2/293.2 min | 280.9/309.5 min | ||||||
| Pw = 70% | Pw = 60% | ||||||
| 1 | 4 | [‘4’, ‘2’, ‘3’] | 2 | UAV | [‘4’] | 4 | CV |
| 2 | 5 | [‘5’, ‘2’, ‘3’] | 2 | UAV | [‘5’, ‘3’] | 5 | CV |
| 3 | 6 | [‘6’, ‘2’, ‘3’] | 2 | UAV | [‘6’, ‘3’] | 6 | CV |
| 4 | 7 | [‘7’] | 7 | CV | [‘7’] | 7 | CV |
| 5 | 9 | [‘9’, ‘8’] | 8 | UAV | [‘9’] | 9 | CV |
| 6 | 10 | [‘10’, ‘0’, ‘1’, ‘8’, ‘12’, ‘14’] | 0 | UAV | [‘10’, ‘12’, ‘14’] | 12 | UAV |
| 7 | 11 | [‘11’] | 11 | UAV | [‘11’] | 11 | CV |
| 8 | 13 | [‘13’] | 13 | CV | [‘13’] | 13 | CV |
| 9 | 14 | [‘14’, ‘10’, ‘12’] | 12 | UAV | [‘14’, ‘10’, ‘12’] | 12 | UAV |
| 10 | 15 | [‘15’, ‘12’, ‘14’] | 12 | UAV | [‘15’, ‘12’, ‘14’] | 12 | UAV |
| 11 | 17 | [‘17’, ‘0’, ‘1’, ‘18’] | 0 | UAV | [‘17’, ‘0’, ‘1’, ‘18’] | 0 | UAV |
| 12 | 20 | [‘20’, ‘2’] | 2 | UAV | [‘20’] | 20 | CV |
| 13 | 21 | [‘8’] | 8 | UAV | [(no service)] | n/a | n/a |
| [‘0’, ‘2’, ‘7’, ‘8’, ‘11’, ‘12’, ‘13’] | [‘0’, ‘4’, ‘5’, ‘6’, ‘7’, ‘9’, ‘11’, ‘12’, ‘13’, ‘20’] | ||||||
| [‘0’, ‘2’, ‘7’, ‘8’, ‘11’, ‘13’, ‘12’, ‘1’] | [‘0’, ‘6’, ‘20’, ‘5’, ‘4’, ‘7’, ‘11’, ‘9’, ‘12’, ‘13’, ‘1’] | ||||||
| [(‘0’, ‘2’), (‘2’, ‘7’), (‘7’, ‘8’), (‘8’, ‘11’), (‘11’, ‘13’), (‘13’, ‘12’), (‘12’, ‘1’)] | [(‘0’, ‘6’), (‘6’, ‘20’), (‘20’, ‘5’), (‘5’, ‘4’), (‘4’, ‘7’), (‘7’, ‘11’), (‘11’, ‘9’), (‘9’, ‘12’), (‘12’, ‘13’), (‘13’, ‘1’)] | ||||||
| Mean dTOT | 264.1 s/4.4 min | 754.4 s/12.6 min | |||||
| 18,300.2 s/305.0 min | 32,176.7 s/536.3 min | ||||||
| 292.9/322.7 min | 500.4/574.1 min | ||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kouretas, K.; Kepaptsoglou, K. Stochastic Planning of Synergetic Conventional Vehicle and UAV Delivery Operations. Drones 2025, 9, 359. https://doi.org/10.3390/drones9050359
Kouretas K, Kepaptsoglou K. Stochastic Planning of Synergetic Conventional Vehicle and UAV Delivery Operations. Drones. 2025; 9(5):359. https://doi.org/10.3390/drones9050359
Chicago/Turabian StyleKouretas, Konstantinos, and Konstantinos Kepaptsoglou. 2025. "Stochastic Planning of Synergetic Conventional Vehicle and UAV Delivery Operations" Drones 9, no. 5: 359. https://doi.org/10.3390/drones9050359
APA StyleKouretas, K., & Kepaptsoglou, K. (2025). Stochastic Planning of Synergetic Conventional Vehicle and UAV Delivery Operations. Drones, 9(5), 359. https://doi.org/10.3390/drones9050359