
Estimation of Equivalent Transmitted Power of Sparse Array Based on Unmanned Aerial Vehicles in Collaborative Jamming


Abstract
1. Introduction
2. The Waveform Superposition Algorithm
2.1. The Gain of Nodes
2.2. Waveform Superposition
3. Array-Based Jamming Power Estimation
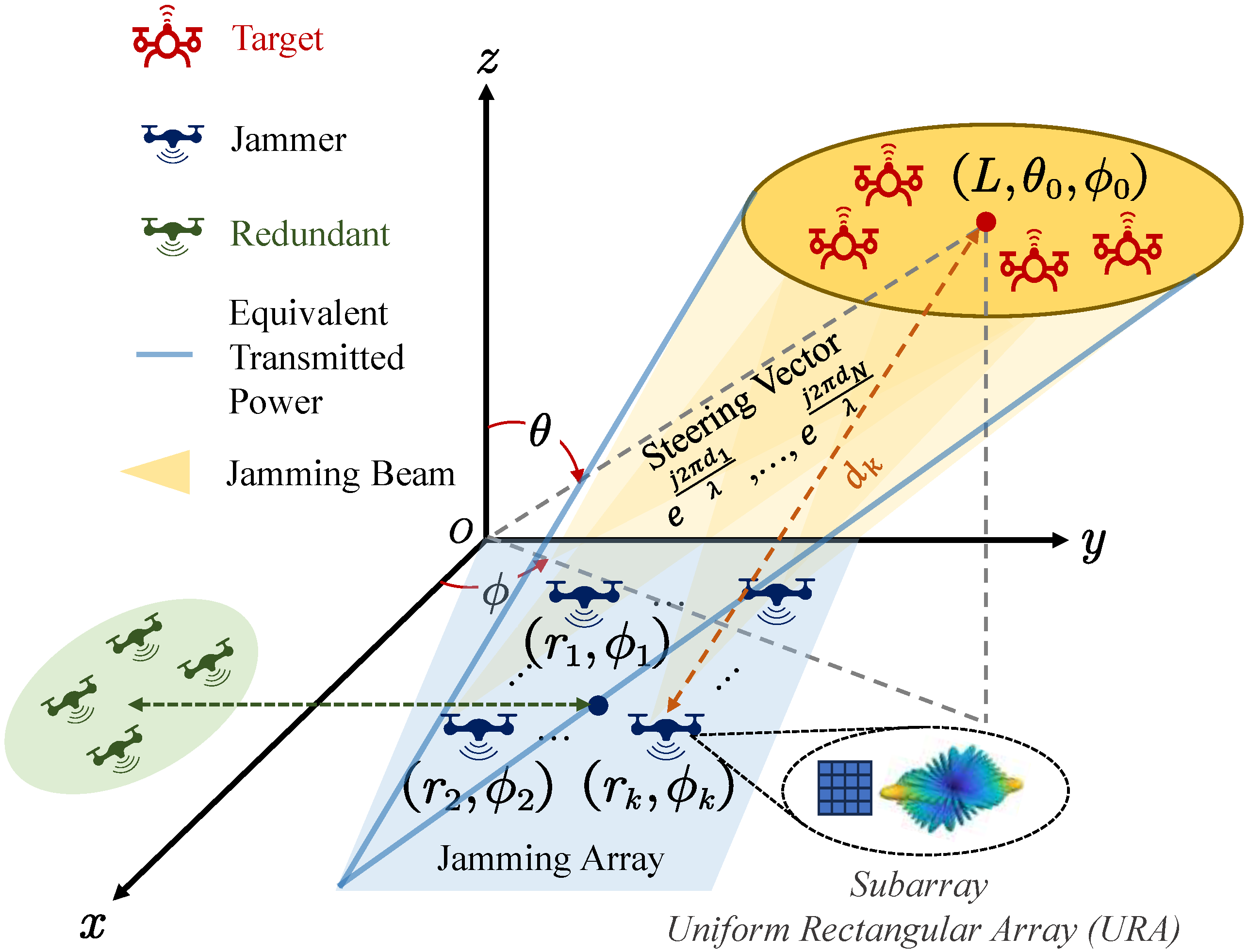
3.1. Sparse Array Model
3.2. Equivalent Transmitted Power
4. Discussion
4.1. Accuracy of Jamming Power Estimation
4.2. Algorithm Complexity Analysis
5. Experiment
5.1. Jamming Evaluation
5.2. Jamming Array Reconstruction After Attack
6. Conclusions
Author Contributions
Funding
Data Availability Statement
DURC Statement
Conflicts of Interest
References
- Spezio, A. Electronic warfare systems. IEEE Trans. Microw. Theory Tech. 2002, 50, 633–644. [Google Scholar] [CrossRef]
- Kim, D.G.; Park, G.H.; Kim, H.N.; Park, J.O.; Park, Y.M.; Shin, W.H. Computationally Efficient TDOA/FDOA Estimation for Unknown Communication Signals in Electronic Warfare Systems. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 77–89. [Google Scholar] [CrossRef]
- Gupta, M.K.; Hareesh, G.; Mahla, A. Electronic Warfare: Issues and Challenges for Emitter Classification. Def. Sci. J. 2011, 61, 228–234. [Google Scholar] [CrossRef]
- Sharma, P.; Sarma, K.K.; Mastorakis, N.E. Artificial Intelligence Aided Electronic Warfare Systems- Recent Trends and Evolving Applications. IEEE Access 2020, 8, 224761–224780. [Google Scholar] [CrossRef]
- You, S.; Diao, M.; Gao, L. Deep Reinforcement Learning for Target Searching in Cognitive Electronic Warfare. IEEE Access 2019, 7, 37432–37447. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, L.; Jiang, R.; Hu, J.; Xu, S. Radar Jamming Decision-Making in Cognitive Electronic Warfare: A Review. IEEE Sens. J. 2023, 23, 11383–11403. [Google Scholar] [CrossRef]
- Mittal, A.; Xu, Z.; Du, K.; Kumar, S.S.; Shrivastava, A. An Ultralow-Power Closed-Loop Distributed Beamforming Technique for Efficient Wireless Power Transfer. IEEE Internet Things J. 2024, 11, 31301–31316. [Google Scholar] [CrossRef]
- Sharma, S.; De, S. Distributed RF Beamforming for Wireless Power Transfer Over Time Varying Channels. In Proceedings of the ICC 2023—IEEE International Conference on Communications, Rome, Italy, 28 May–June 2023; pp. 919–924. [Google Scholar] [CrossRef]
- Guo, W.; Wang, Z.; Zhou, H.; Zhou, W.; Cui, X.; Zhang, J. DPDA: Distributed Probability-adaptive Direction Adjustment for Magnetic Wireless Power Transfer. In Proceedings of the 2023 20th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), Madrid, Spain, 11–14 September 2023; pp. 142–150. [Google Scholar] [CrossRef]
- Yuan, X.; Jiang, H.; Hu, Y.; Schmeink, A. Joint Analog Beamforming and Trajectory Planning for Energy-Efficient UAV-Enabled Nonlinear Wireless Power Transfer. IEEE J. Sel. Areas Commun. 2022, 40, 2914–2929. [Google Scholar] [CrossRef]
- Fan, X.; Ding, H.; Zhang, Y.; Trappe, W.; Han, Z.; Howard, R. Distributed beamforming based wireless power transfer: Analysis and realization. Tsinghua Sci. Technol. 2020, 25, 758–775. [Google Scholar] [CrossRef]
- Liu, H.; Zhao, H.; Li, W.; Liu, B. Synthesis of Sparse Planar Arrays Using Matrix Mapping and Differential Evolution. IEEE Antennas Wirel. Propag. Lett. 2016, 15, 1905–1908. [Google Scholar] [CrossRef]
- Gu, P.; He, Z.; Xu, J.; Leung, K.W.; Chen, R.S. Design of Wide Scanning Sparse Planar Array Using Both Matrix-Pencil and Space-Mapping Methods. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 140–144. [Google Scholar] [CrossRef]
- Yepes, L.F.; Covarrubias, D.H.; Alonso, M.A.; Ferrús, R. Hybrid Sparse Linear Array Synthesis Applied to Phased Antenna Arrays. IEEE Antennas Wirel. Propag. Lett. 2014, 13, 185–188. [Google Scholar] [CrossRef]
- Syeda, R.Z.; de Vaate, J.G.b.; Prinsloo, D. Regular and Irregular-on-Grid Sparse Array Comparison of Connected Aperture Arrays. IEEE Antennas Wirel. Propag. Lett. 2020, 19, 586–590. [Google Scholar] [CrossRef]
- Dai, D.; Yao, M.; Ma, H.; Jin, W.; Zhang, F. An Asymmetric Mapping Method for the Synthesis of Sparse Planar Arrays. IEEE Antennas Wirel. Propag. Lett. 2018, 17, 70–73. [Google Scholar] [CrossRef]
- Song, D.; Wang, W.; Xu, Z.; Xiong, Z.; Kirubarajan, T. Focused energy delivery with protection for precision electronic warfare. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 3053–3064. [Google Scholar] [CrossRef]
- Chen, S.; Xu, C.; Zhang, J. Efficient focused energy delivery with grating lobe mitigation for precision electronic warfare. Signal Process. 2020, 169, 107409. [Google Scholar] [CrossRef]
- Yang, Z.; Li, Z.; Yu, X.; Zhou, Q.; Huang, C.; Zhang, J. Maximin Design of Wideband Constant Modulus Waveform for Distributed Precision Jamming. IEEE Trans. Signal Process. 2024, 72, 1316–1332. [Google Scholar] [CrossRef]
- Huang, C.; Huang, Z.; Zhou, Q.; Li, Z.; Yang, Z.; Zhang, J. Joint Transmit Waveform and Receive Filter Design for the DFRC System With Imperfect CSI. IEEE Trans. Radar Syst. 2024, 2, 288–302. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
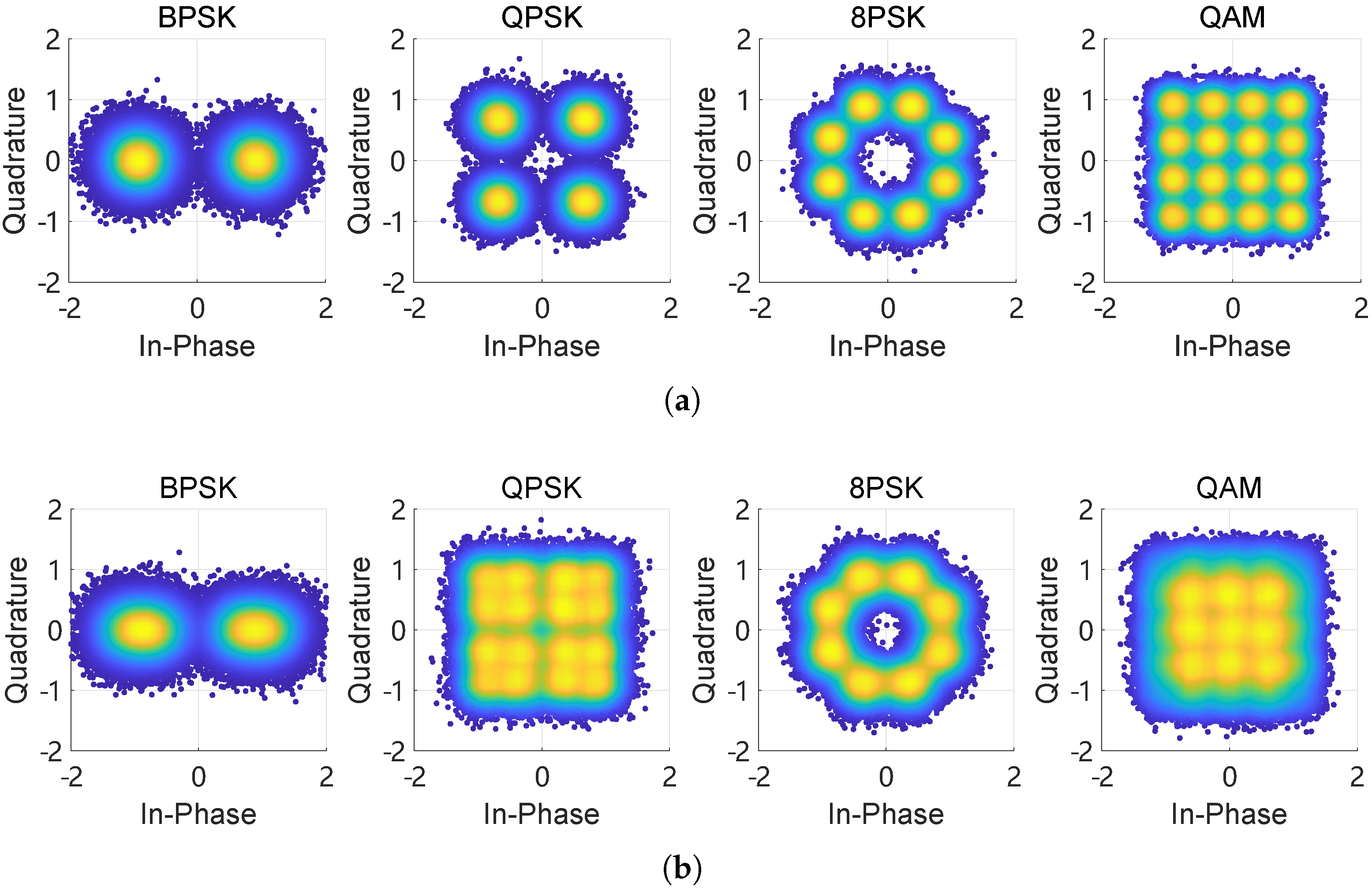
| Modulation Type | BPSK | QPSK | 8PSK | QAM |
|---|---|---|---|---|
| BER1 | 0.1158 | 0.1162 | 0.2182 | 0.3360 |
| BER2 | 0.1160 | 0.1170 | 0.2189 | 0.3364 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Zuo, Z.; Huang, Z.; Zhou, J.; Ba, J.; Li, L.; Huang, H. Estimation of Equivalent Transmitted Power of Sparse Array Based on Unmanned Aerial Vehicles in Collaborative Jamming. Drones 2025, 9, 242. https://doi.org/10.3390/drones9040242
Zhao Y, Zuo Z, Huang Z, Zhou J, Ba J, Li L, Huang H. Estimation of Equivalent Transmitted Power of Sparse Array Based on Unmanned Aerial Vehicles in Collaborative Jamming. Drones. 2025; 9(4):242. https://doi.org/10.3390/drones9040242
Chicago/Turabian StyleZhao, Yongjie, Zhen Zuo, Zhiping Huang, Jing Zhou, Junhao Ba, Longqing Li, and Honghe Huang. 2025. "Estimation of Equivalent Transmitted Power of Sparse Array Based on Unmanned Aerial Vehicles in Collaborative Jamming" Drones 9, no. 4: 242. https://doi.org/10.3390/drones9040242
APA StyleZhao, Y., Zuo, Z., Huang, Z., Zhou, J., Ba, J., Li, L., & Huang, H. (2025). Estimation of Equivalent Transmitted Power of Sparse Array Based on Unmanned Aerial Vehicles in Collaborative Jamming. Drones, 9(4), 242. https://doi.org/10.3390/drones9040242