




OTFS-Based Handover Triggering in UAV Networks



Abstract
1. Introduction
- We will investigate the issue of handover triggering within an integrated UAV-to-ground network, employing the time-varying DD channel modeling given in [8]. Subsequently, we will demonstrate that both the conventional RSS and the FT channel gain-based handover triggering are significantly time-variant, particularly in this highly dynamic environment characterized by extreme UAV velocities.
- We will propose a handover-triggering framework based on OTFS modulation, where the estimated DD channel will be used for initiating the handover routines. In this scenario, the DD channel gains from the serving and target cells are compared, upon which a handover decision will be made. In this paper, we will mathematically prove that the DD channel power is constant over the whole OTFS symbol duration even in time-varying DD channel conditions. Through this stable handover-triggering strategy, a low number of handover decisions are made, and high throughput will be achieved coming from the lower handover-signaling overhead and the lower unnecessary handovers.
- As the proposed approach relies on the estimated DD channel, it is vulnerable to channel estimation errors. To bind this effect on the performance of the proposed scheme, we mathematically study the channel estimation errors in the most dominant DD channel estimation strategies, which are least square (LS)- and minimum mean square error (MMSE)-based channel estimators. In both cases, we showed that the variance of the channel estimation error is lower than that introduced by additive white Gaussian noise (AWGN) at Rx, which proves the efficiency of the proposed scheme even under channel estimation errors.
- Numerical analyses are conducted to prove the potency of the proposed DD handover strategy over the conventional RSS and FT channel gain-based ones in terms of the handover overhead, the achievable throughput, and the ping-pong ratio in different scenarios. Also, the performance of the proposed scheme under the effect of channel estimation error is bounded using numerical simulations.
2. Related Works
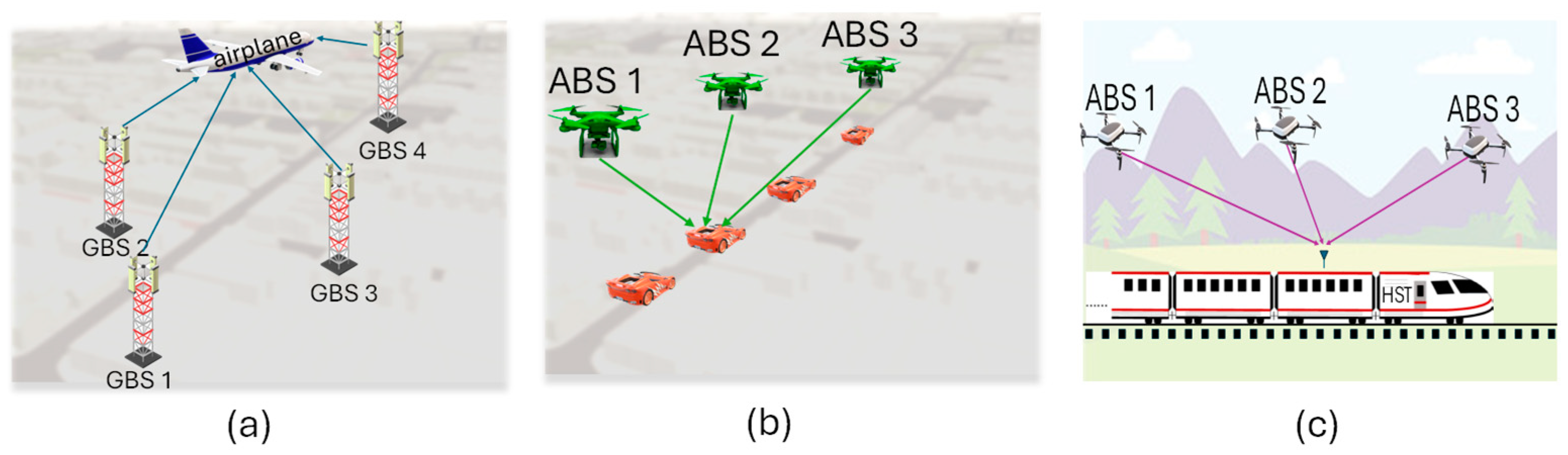
3. UAV to Ground Handover Scenarios and Channel Modeling
4. OTFS Modulation/Demodulation
4.1. OTFS Modulation
4.2. OTFS Demodulation
5. Proposed UAV–Ground Handover Triggering Based on DD Channel Estimation
5.1. RSS-Based Handover Triggering
5.2. FT-Channel-Based Handover Triggering
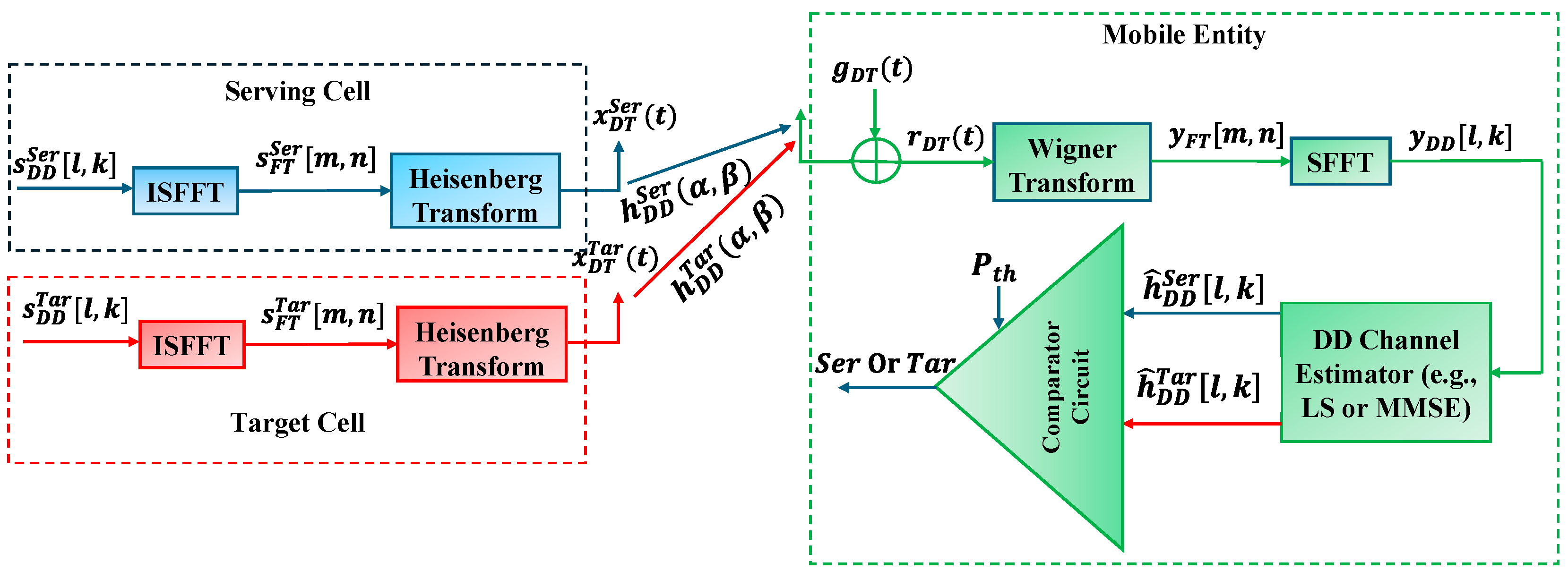
5.3. Proposed DD-Channel-Based Handover Triggering
6. Mathematical Analysis of the Channel Estimation Error Effect
6.1. LS-Based OTFS DD Channel Estimation
6.2. MMSE-Based OTFS DD Channel Estimation
7. Numerical Analysis
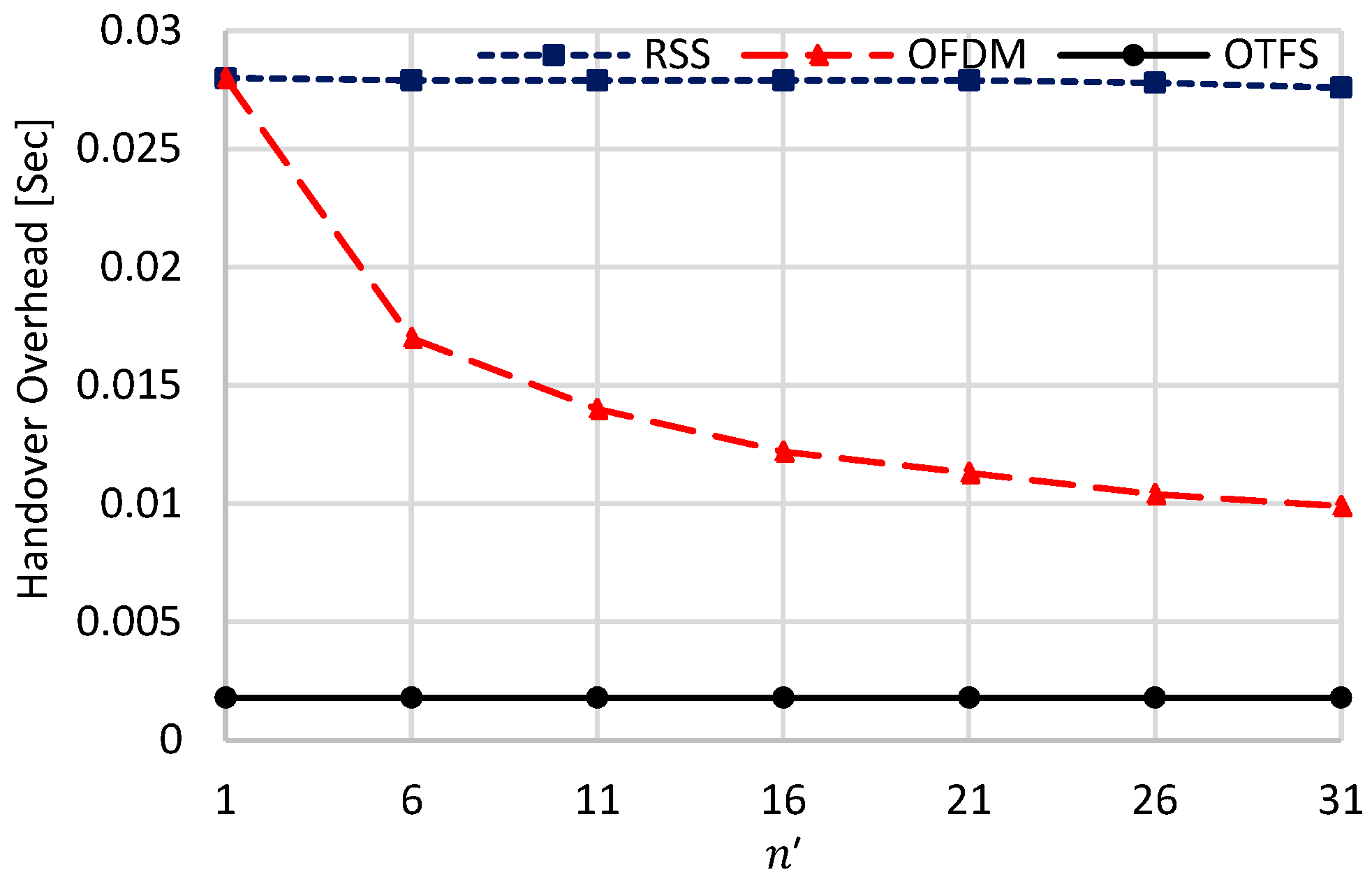
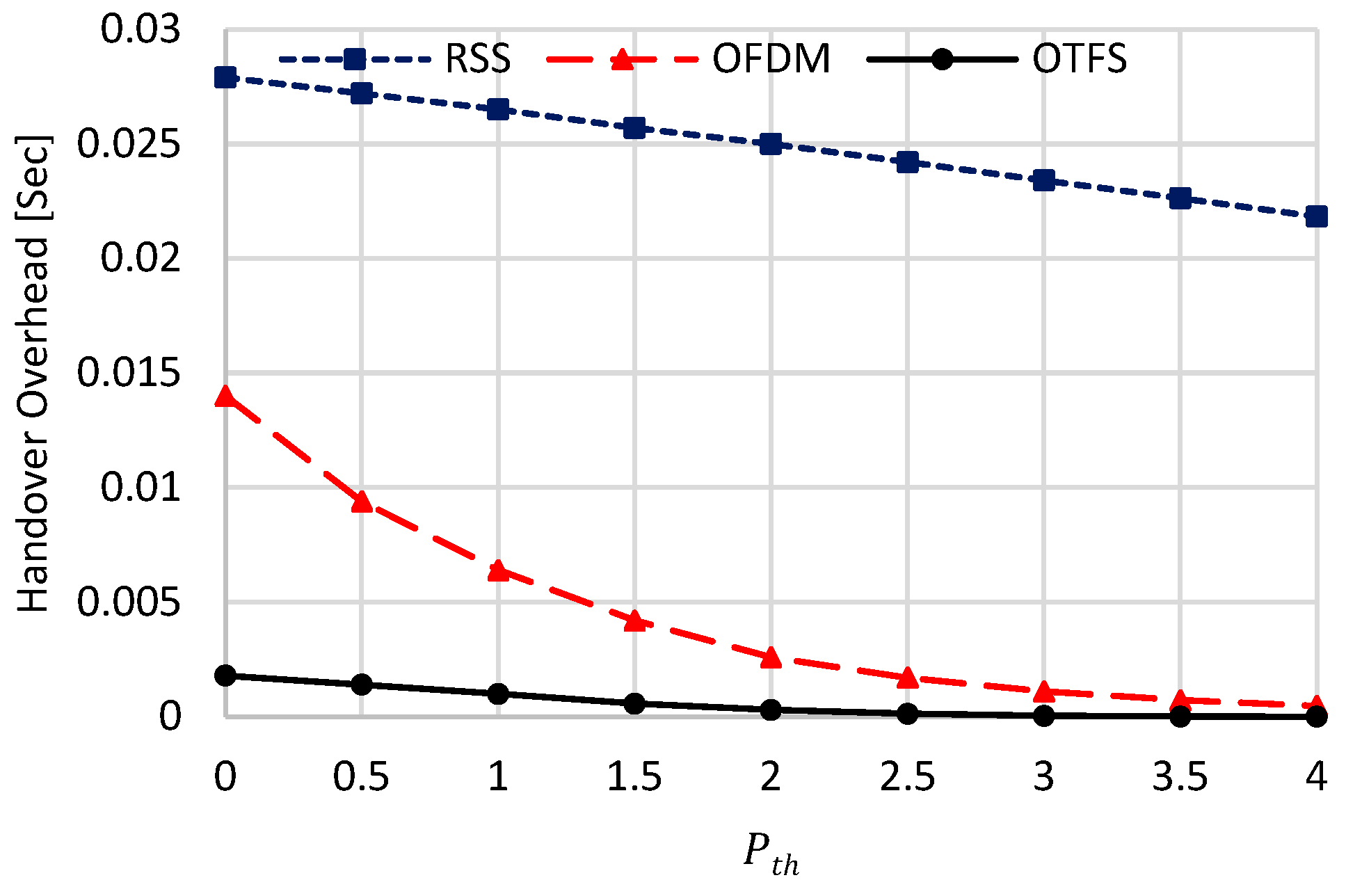
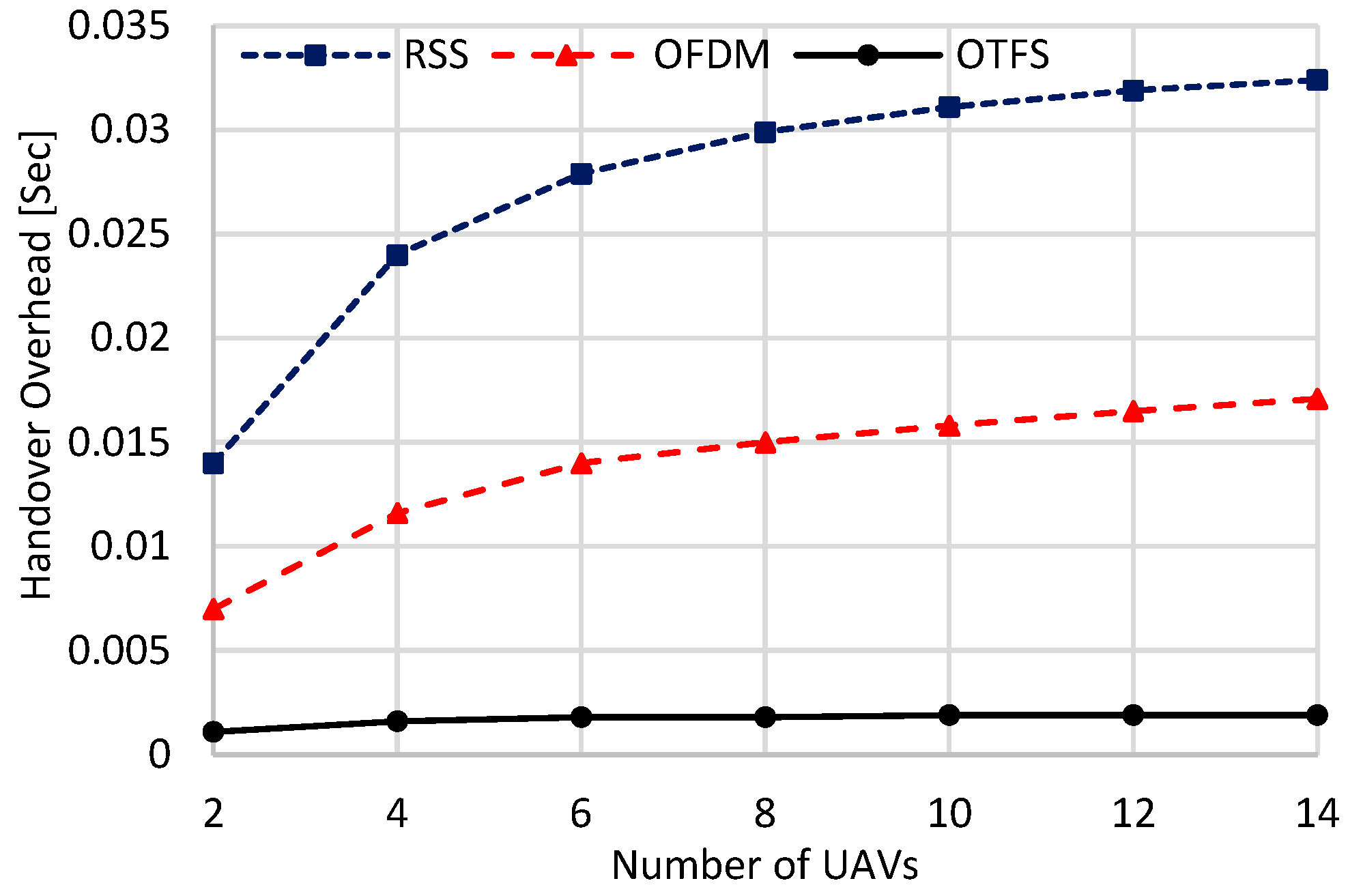
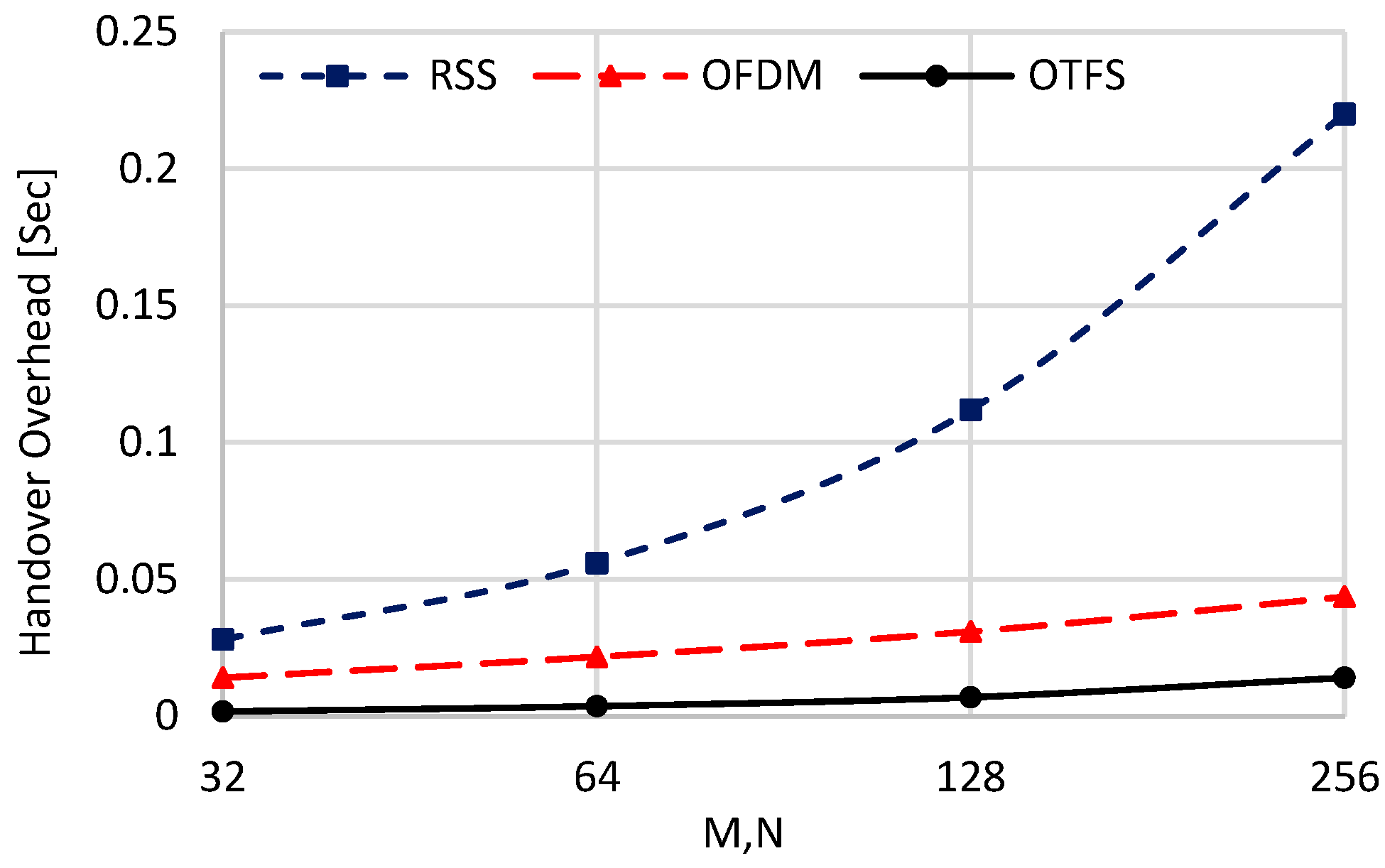
- Handover Overhead [s], which is defined as follows [30]:Actually, there are many components of single-handover duration, including, channel estimation overhead, signaling overhead, processing delay, data packet loss and re-transmission delay, and synchronization time. In this paper, for fair comparisons, we were more concerned about physical-layer handover issues than the network-layer handover issues. Thus, we only considered channel estimation overhead, signaling overhead, and synchronization time. Also, we considered that only one packet can be used to do all this. Thus, the length of this packet will be s in the case of RSS, a single OFDM symbol duration of s in the case of OFDM, and a single OTFS symbol duration of s in the case of OTFS. Apparently, OTFS has the largest handover duration while the RSS scheme has the lowest one.
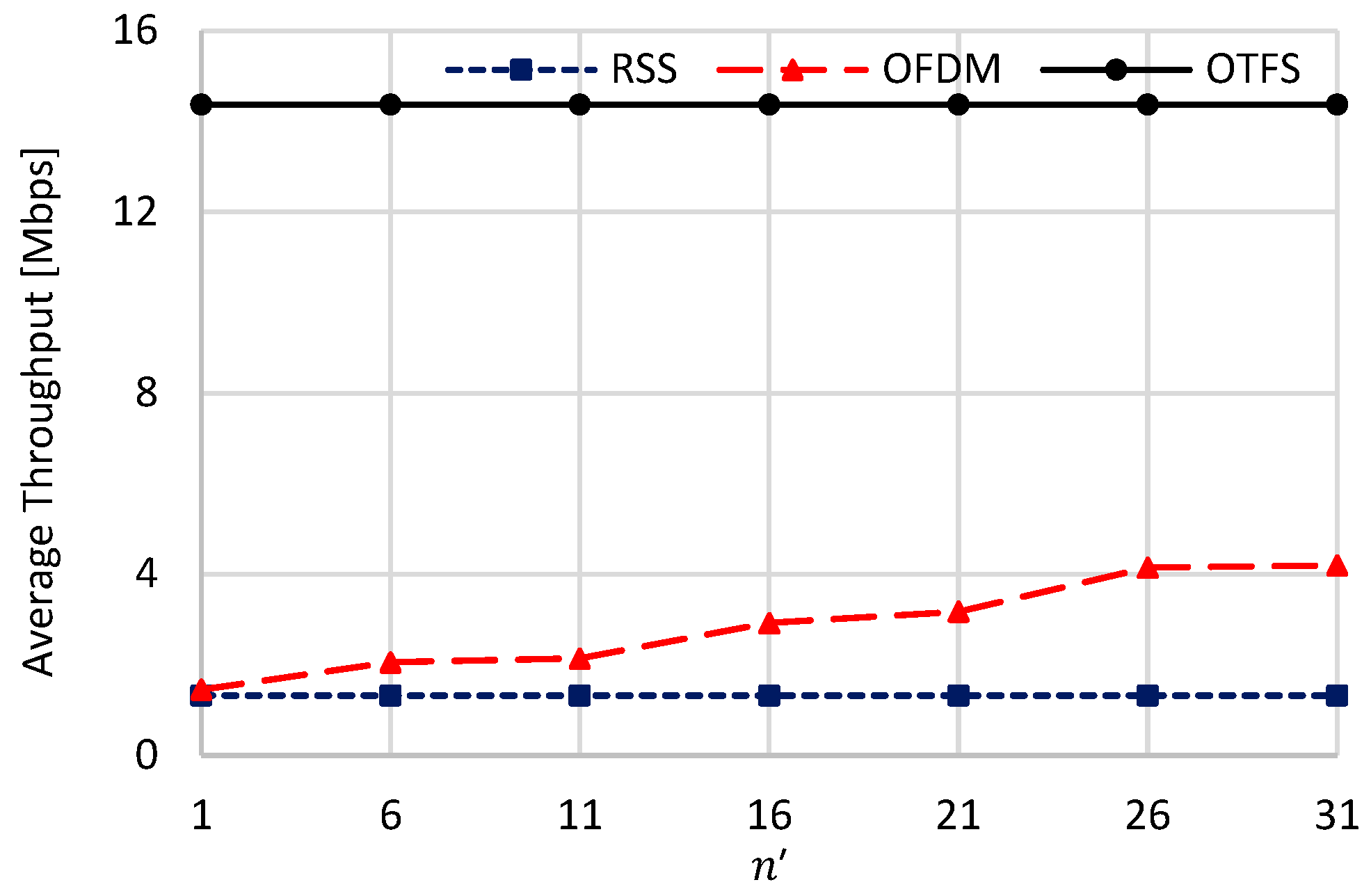
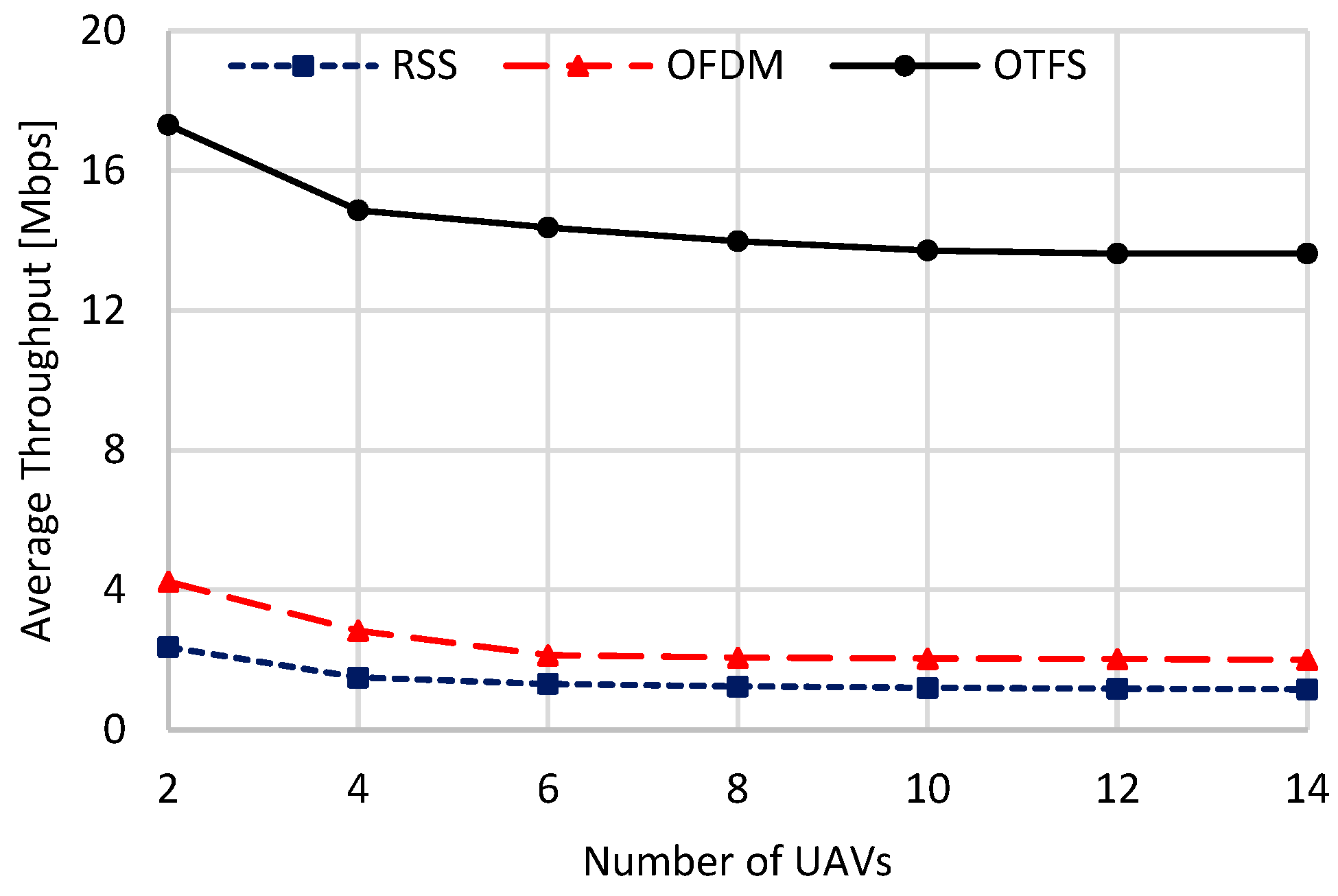
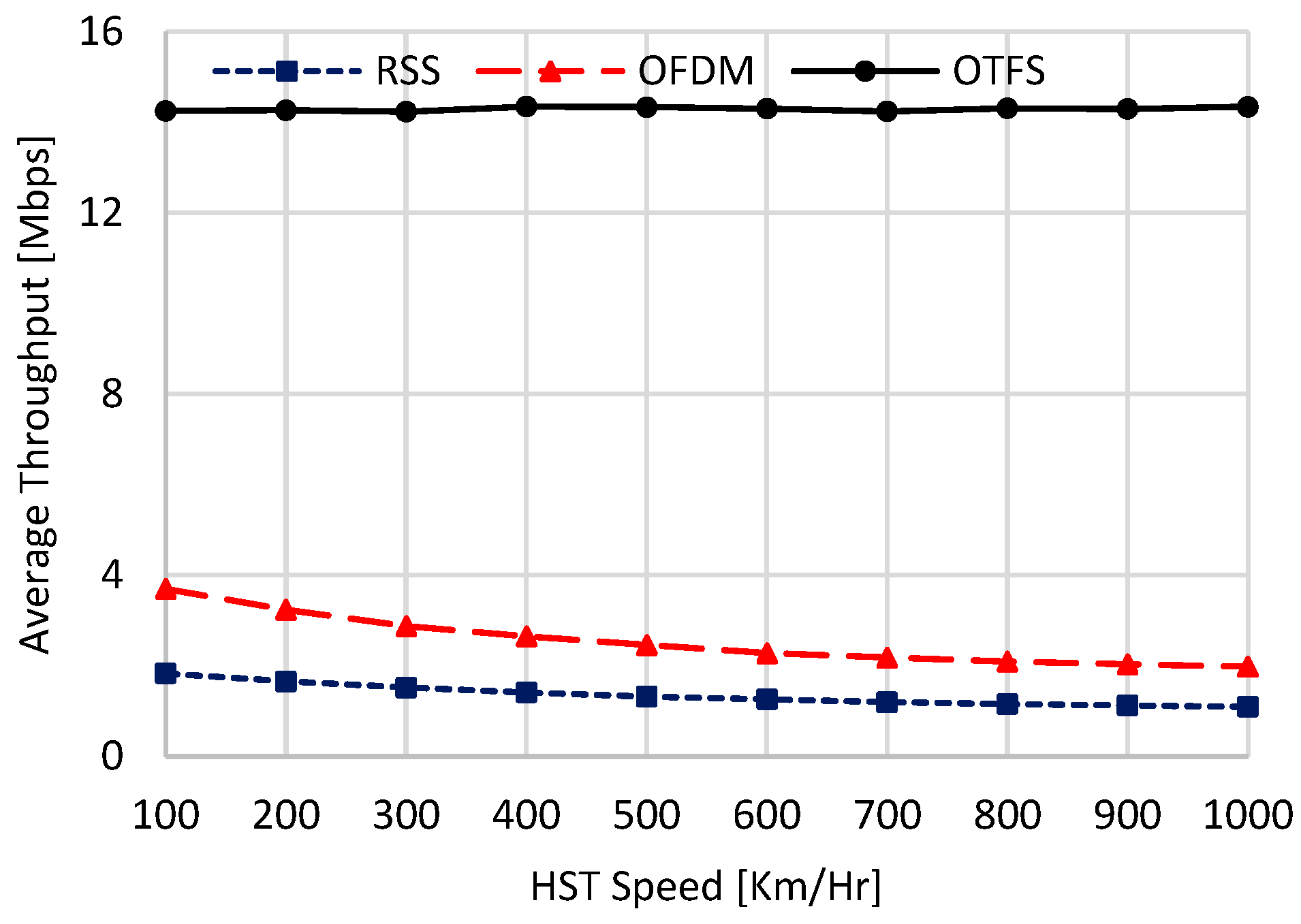
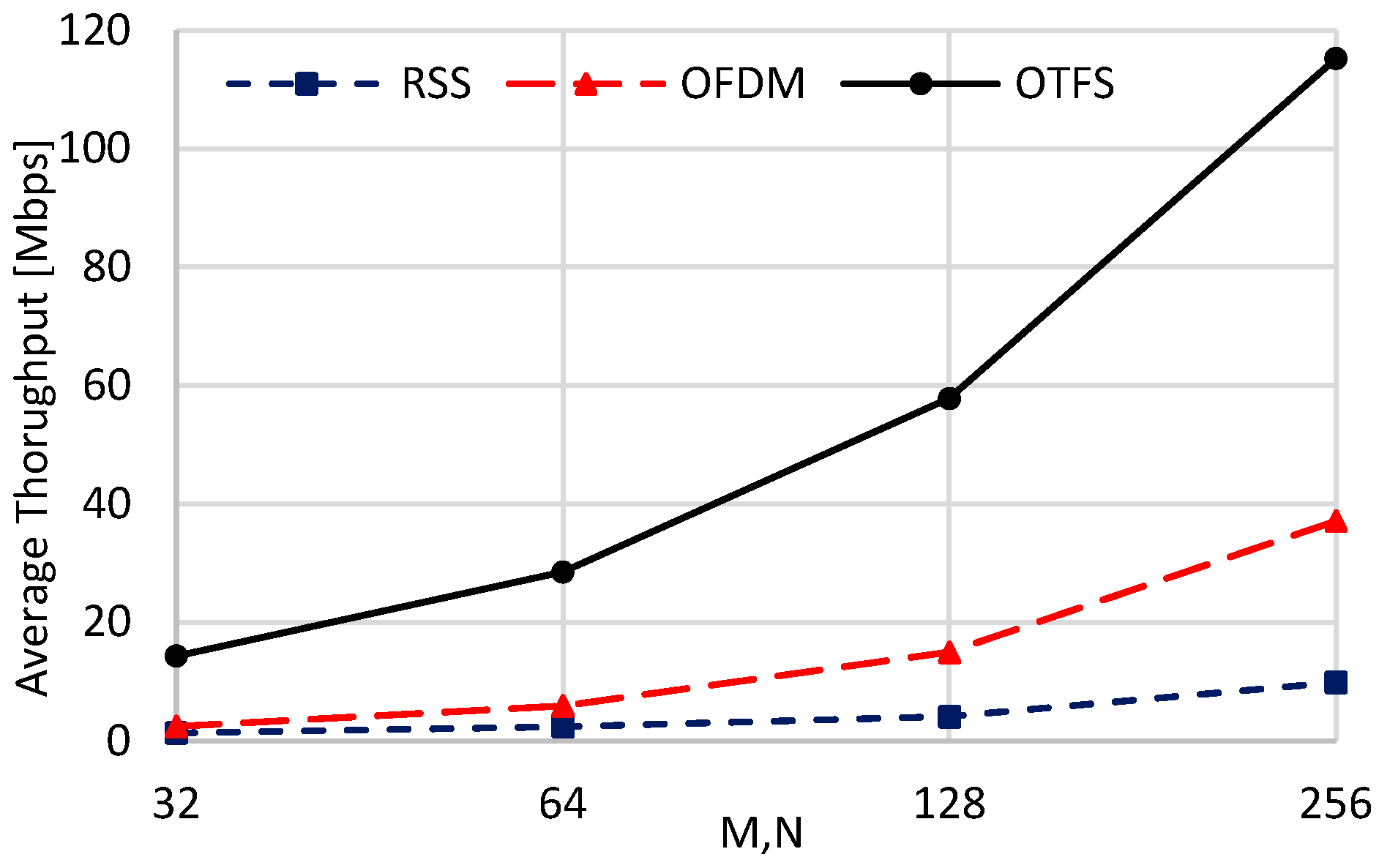
- Average Throughput [bps]: For the average throughput calculation, we followed the formula given in [30]. In this formula, the average throughput is simply the data rate multiplied by the percentage of the handover overhead as follows:where is the achievable average data rate resulting from multiplying the total bandwidth with the average spectral efficiency given in (38), and the ratio is the loss in the achievable data rate resulting from the accumulated handover overhead due to the transmission of the OTFS symbols.
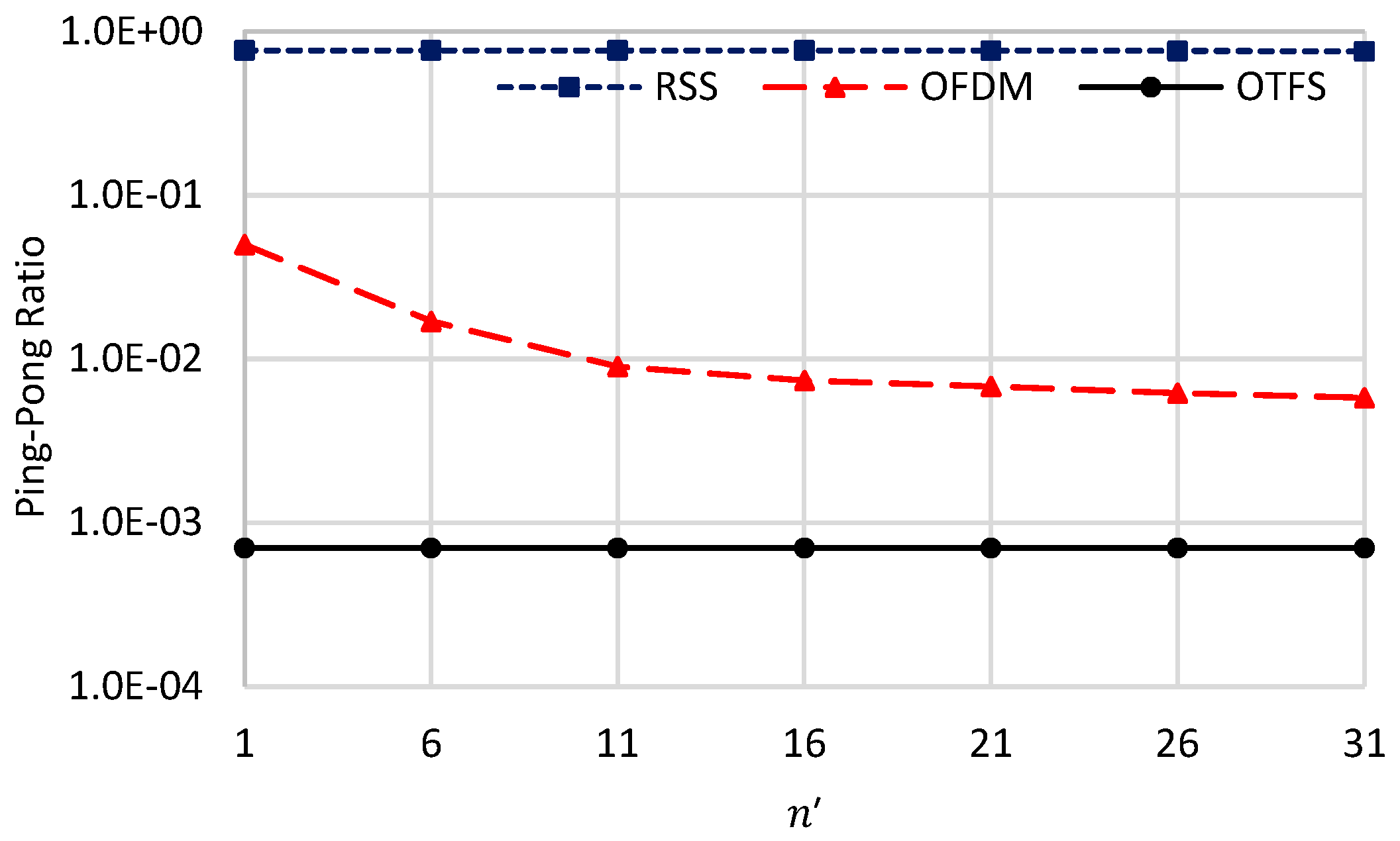
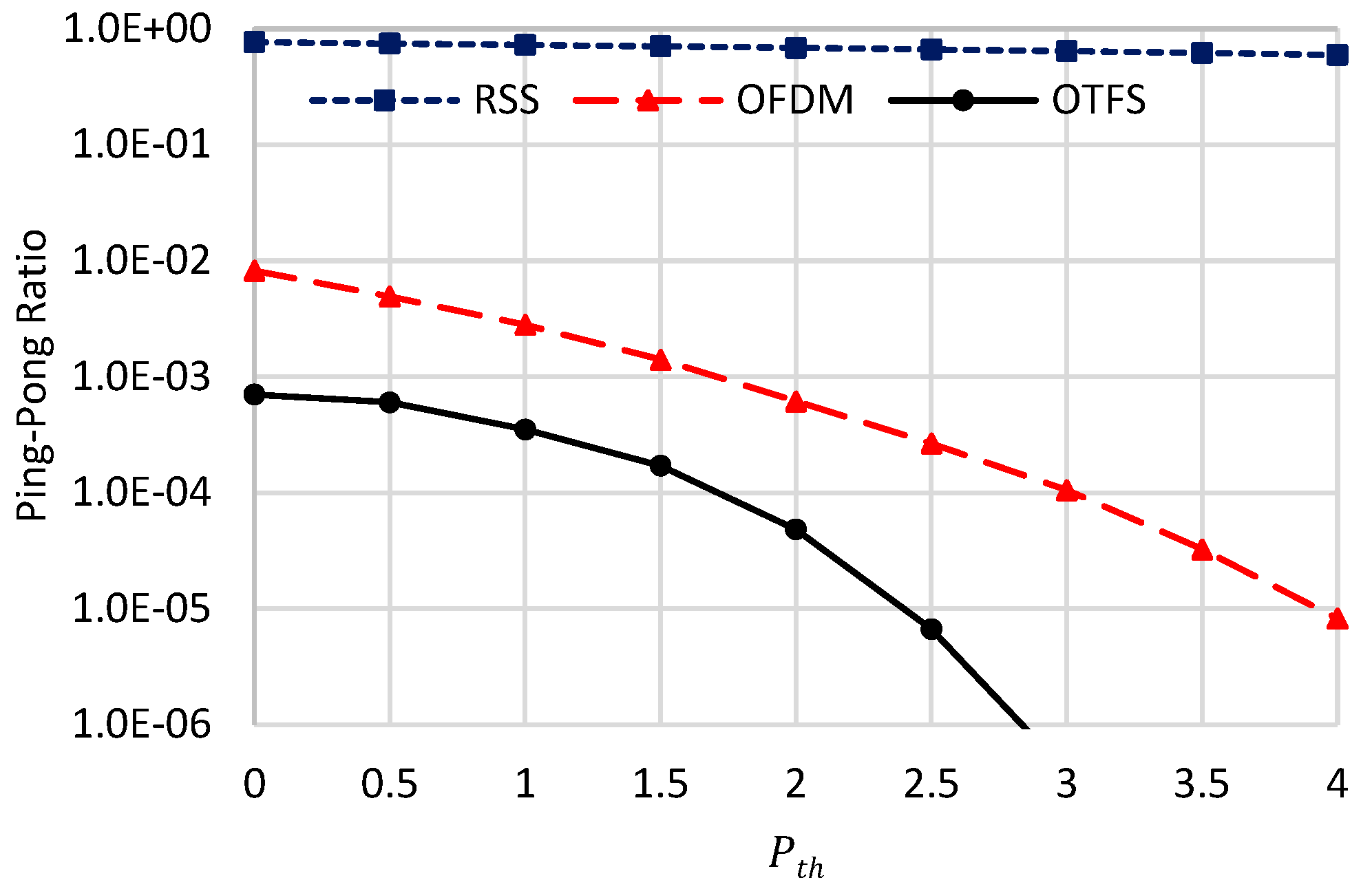
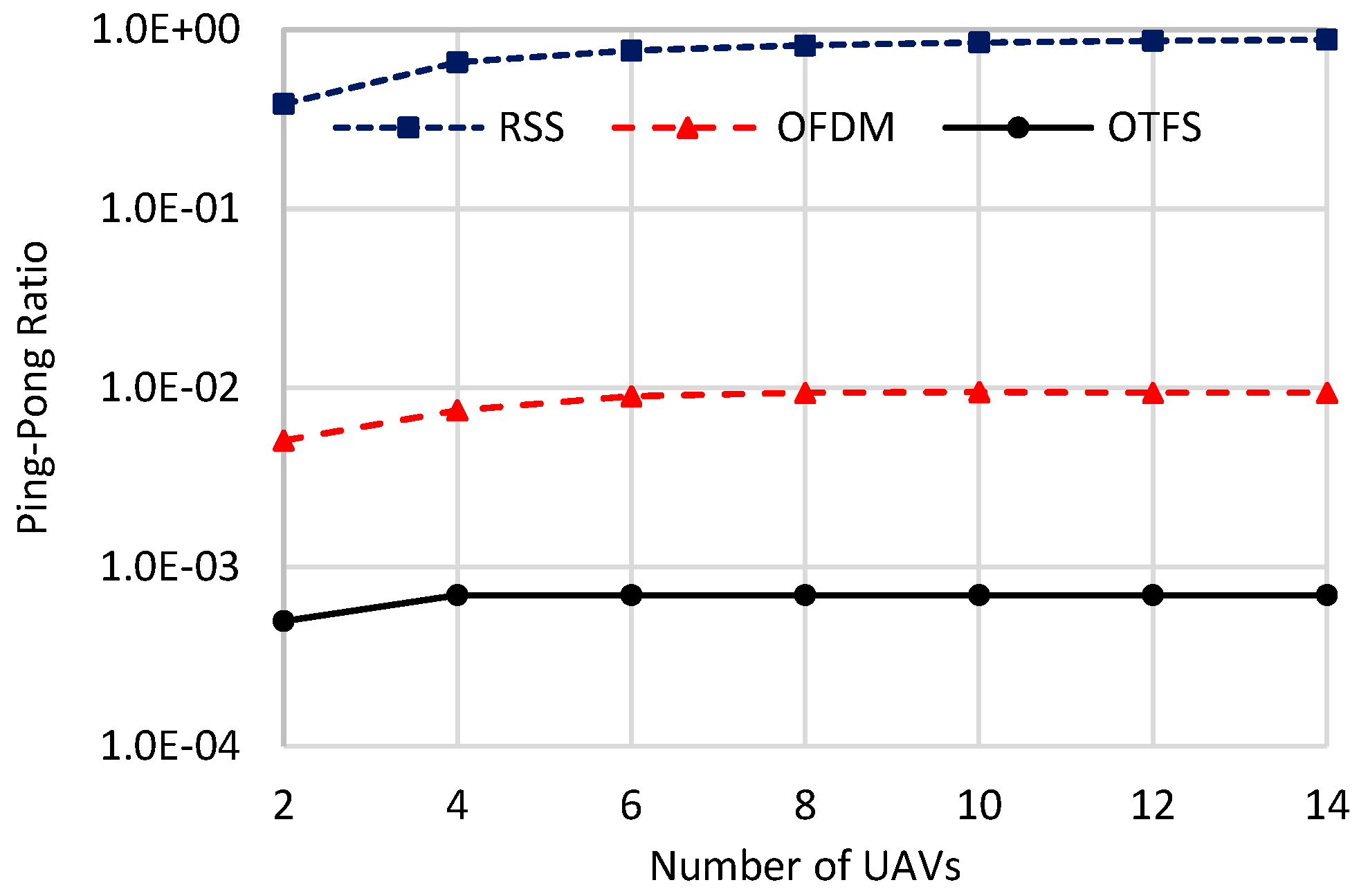
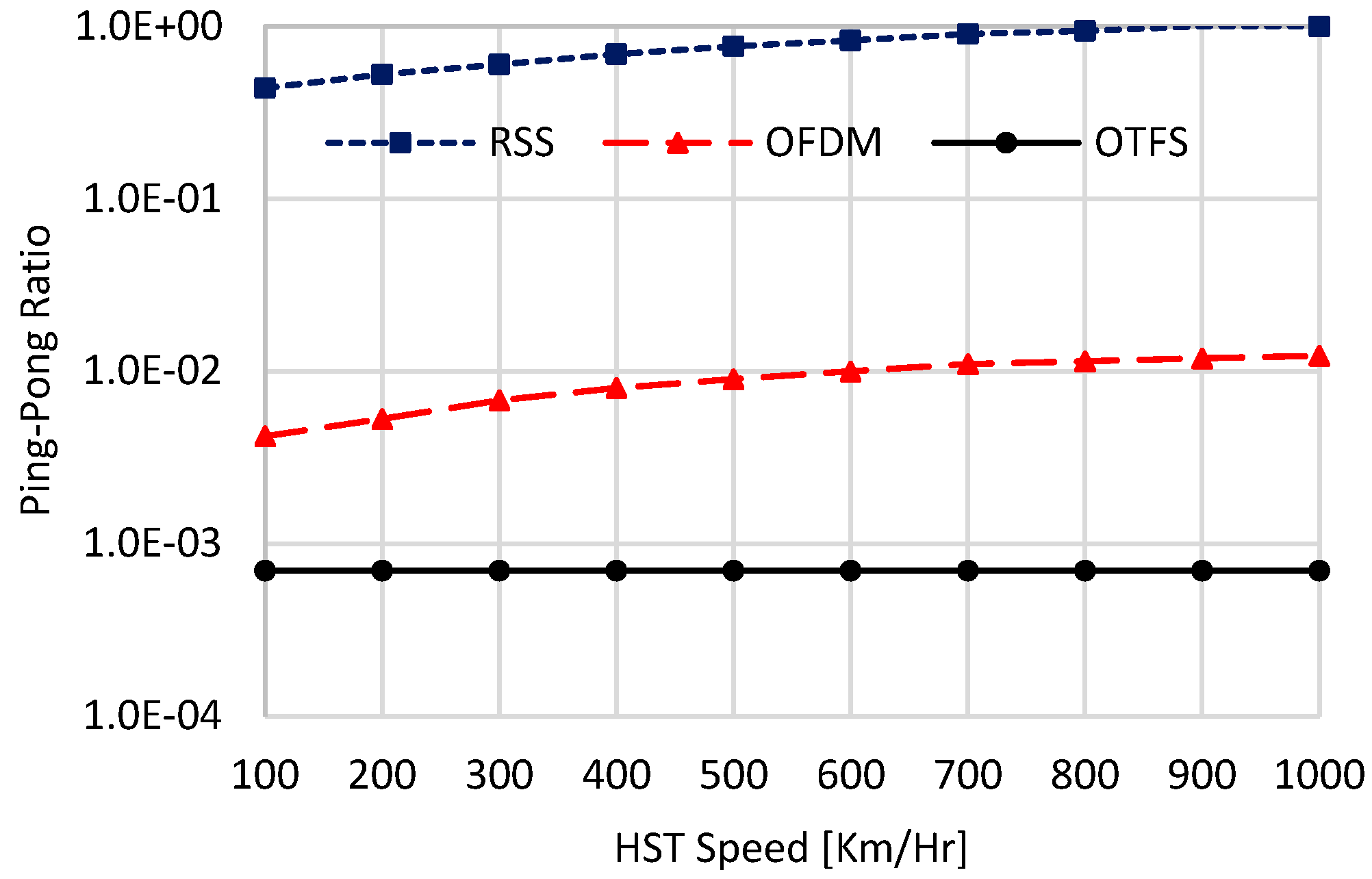
- Ping-Pong Ratio, which is defined as the number of handovers, where the HST switches back and forth to the same UAV, divided by the total number of handovers. This ratio can give an indication of the number of unnecessary false handovers, which highly degrades the overall system performance.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| 5.06 GHz [8] | |
| 15 KHz [8] | |
| 32 [31] | |
| 32 [31] | |
| 5.47 × 10−3 [8] | |
| 17 [8] | |
| −114 dBm | |
| 500 Km/Hr | |
| 12 [8] | |
| 10 Watts [8] | |
| 0 |
7.1. Studying the Effects of and
7.1.1. Effect of
7.1.2. Effect of
7.2. Against Number of UAVs
7.3. Against HST Speed
7.4. Against N and M Values
7.5. Effect of Channel Estimation Error
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix B
References
- Alnakhli, M.A.; Mohamed, E.M.; Fouda, M.M. Bandwidth allocation and power control optimization for multi-UAVs enabled 6G network. IEEE Access 2024, 12, 67405–67415. [Google Scholar] [CrossRef]
- Alnakhli, M.; Mohamed, E.M.; Abdulkawi, W.M.; Hashima, S. Joint User Association and Power Control in UAV Network: A Graph Theoretic Approach. Electronics 2024, 13, 779. [Google Scholar] [CrossRef]
- Mohamed, E.M.; Alnakhli, M.; Fouda, M.M. Joint UAV Trajectory Planning and LEO-Sat Selection in SAGIN. IEEE Open J. Commun. Soc. 2024, 5, 1624–1638. [Google Scholar] [CrossRef]
- Amrallah, A.; Mohamed, E.M.; Tran, G.K.; Sakaguchi, K. UAV Trajectory Optimization in a Post-Disaster Area Using Dual Energy-Aware Bandits. Sensors 2023, 23, 1402. [Google Scholar] [CrossRef]
- Zheng, J.; Zhu, Q.; Jamalipour, A. Content Delivery Performance Analysis of a Cache-Enabled UAV Base Station Assisted Cellular Network for Metaverse Users. IEEE J. Sel. Areas Commun. 2024, 42, 643–657. [Google Scholar] [CrossRef]
- Mohamed, E.M.; Hashima, S.; Hatano, K. Energy Aware Multiarmed Bandit for Millimeter Wave-Based UAV Mounted RIS Networks. IEEE Wirel. Commun. Lett. 2022, 11, 1293–1297. [Google Scholar] [CrossRef]
- Li, D.; Xu, S.; Zhao, C.; Wang, Y.; Xu, R.; Ai, B. Data Collection in Laser-Powered UAV-Assisted IoT Networks: Phased Scheme Design Based on Improved Clustering Algorithm. IEEE Trans. Green Commun. Netw. 2024, 8, 482–497. [Google Scholar] [CrossRef]
- Ma, Y.; Ma, G.; Ai, B.; Fei, D.; Wang, N.; Zhong, Z.; Yuan, J. Characteristics of Channel Spreading Function and Performance of OTFS in High-Speed Railway. IEEE Trans. Wirel. Commun. 2023, 22, 7038–7054. [Google Scholar] [CrossRef]
- He, Y.; Huang, W.; Wei, H.; Zhang, H. Effect of Channel Fading and Time-to-Trigger Duration on Handover Performance in UAV Networks. IEEE Commun. Lett. 2021, 25, 308–312. [Google Scholar] [CrossRef]
- Tayyab, M.; Gelabert, X.; Jäntti, R. A Survey on Handover Management: From LTE to NR. IEEE Access 2019, 7, 118907–118930. [Google Scholar] [CrossRef]
- Nor, A.M.; Mohamed, E.M. Li-Fi Positioning for Efficient Millimeter Wave Beamforming Training in Indoor Environment. Mob. Netw. Appl. 2019, 24, 517–531. [Google Scholar] [CrossRef]
- Hadani, R.; Rakib, S.; Tsatsanis, M.; Monk, A.; Goldsmith, A.J.; Molisch, A.F.; Calderbank, R. Orthogonal Time Frequency Space Modulation. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Hong, Y.; Thaj, T.; Viterbo, E. Delay-Doppler Communications: Principles and Applications; Academic Press: Cambridge, MA, USA, 2022; ISBN 9780323850285. [Google Scholar]
- Thaj, T.; Viterbo, E. Low Complexity Iterative Rake Decision Feedback Equalizer for Zero-Padded OTFS Systems. IEEE Trans. Veh. Technol. 2020, 69, 15606–15622. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, X.; Zhang, J.A. Low-Overhead OTFS Transmission with Frequency or Time Domain Channel Estimation. IEEE Trans. Veh. Technol. 2024, 73, 799–811. [Google Scholar] [CrossRef]
- Zieliński, T.P.; Karpovich, P.; Abratkiewicz, K.; Maksymiuk, R.; Samczyński, P.; Duda, K.; Wypich, M. Wireless OTFS-Based Integrated Sensing and Communication for Moving Vehicle Detection. IEEE Sens. J. 2024, 24, 6573–6583. [Google Scholar] [CrossRef]
- Shang, H.; Chen, R.; Zhang, H.; Ma, G.; He, R.; Ai, B.; Zhong, Z. OTFS modulation and PAPR reduction for IoT-railways. China Commun. 2023, 20, 102–113. [Google Scholar] [CrossRef]
- Lin, H.; Yuan, J. Orthogonal Delay-Doppler Division Multiplexing Modulation. IEEE Trans. Wirel. Commun. 2022, 21, 11024–11037. [Google Scholar] [CrossRef]
- Arunkumar, K.P.; Murthy, C.R. Orthogonal delay scale space modulation: A new technique for wideband time-varying channels. IEEE Trans. Signal Process. 2022, 70, 2625–2638. [Google Scholar]
- Jang, Y.; Raza, S.M.; Kim, M.; Choo, H. Proactive Handover Decision for UAVs with Deep Reinforcement Learning. Sensors 2022, 22, 1200. [Google Scholar] [CrossRef]
- Sharma, V.; Song, F.; You, I.; Chao, H.-C. Efficient Management and Fast Handovers in Software Defined Wireless Networks Using UAVs. IEEE Netw. 2017, 31, 78–85. [Google Scholar] [CrossRef]
- Fujieda, K.; Kimura, T.; Takine, T. Handover Analysis in Aerial Base Station Networks with Different Altitudes. IEEE Commun. Lett. 2024, 28, 138–142. [Google Scholar] [CrossRef]
- Angjo, J.; Shayea, I.; Ergen, M.; Mohamad, H.; Alhammadi, A.; Daradkeh, Y.I. Handover Management of Drones in Future Mobile Networks: 6G Technologies. IEEE Access 2021, 9, 12803–12823. [Google Scholar] [CrossRef]
- Liu, D.; Xu, Y.; Wang, J.; Chen, J.; Yao, K.; Wu, Q.; Anpalagan, A. Opportunistic UAV Utilization in Wireless Networks: Motivations, Applications, and Challenges. IEEE Commun. Mag. 2020, 58, 62–68. [Google Scholar] [CrossRef]
- Ma, Y.; Ma, G.; Ai, B.; Wang, N.; Zhong, Z. Impacts of Time-Varying Channel Spreading Function on the OTFS Modulation System. IEEE Trans. Veh. Technol. 2024, 73, 10744–10749. [Google Scholar] [CrossRef]
- Raviteja, P.; Hong, Y.; Viterbo, E.; Biglieri, E. Practical Pulse-Shaping Waveforms for Reduced-Cyclic-Prefix OTFS. IEEE Trans. Veh. Technol. 2019, 68, 957–961. [Google Scholar] [CrossRef]
- Shen, W.; Dai, L.; Fan, P.A.J.; Heath, R.W. Channel Estimation for Orthogonal Time Frequency Space (OTFS) Massive MIMO. IEEE Trans. Signal Process. 2019, 67, 4204–4217. [Google Scholar] [CrossRef]
- Mishra, H.B.; Singh, P.; Prasad, A.K.; Budhiraja, R. OTFS Channel Estimation and Data Detection Designs with Superimposed Pilots. IEEE Trans. Wirel. Commun. 2022, 21, 2258–2274. [Google Scholar] [CrossRef]
- Sayana, K.; Zhuang, J.; Stewart, K. Channel Estimation Modeling for System Simulations. IEEE 802.16 Working Group on Broadband Wireless Access Standards, 2007, IEEE C802.16m-07/208. Available online: https://ieee802.org/16/tgm/contrib/C80216m-07_208r4.pdf (accessed on 26 February 2025).
- Neetu, R.R.; Ghatak, G.; Bohara, V.A.; Srivastava, A. Performance Analysis of Cache-Enabled Handover Management for Vehicular Networks. IEEE Trans. Netw. Sci. Eng. 2024, 11, 1151–1164. [Google Scholar]
- Mohamed, E.M.; Fouda, M.M. OTFS-Based Proactive Dynamic UAV Positioning for High-Speed Train Coverage. IEEE Open J. Commun. Soc. 2024, 5, 5718–5734. [Google Scholar] [CrossRef]
- Ulukök, Z.; Türkmen, R. On some matrix trace inequalities. J. Inequalities Appl. 2010, 2010, 1–8. [Google Scholar] [CrossRef]




| Symbol | Definition |
|---|---|
| Complex amplitude of channel path i in the coherence period q | |
| Number of coherence periods | |
| OFDM symbol duration | |
| Number of subcarriers in the OTFS symbol | |
| Number of Doppler taps in the OTFS symbol | |
| Subcarrier spacing | |
| Duration of each coherence period | |
| NT | OTFS symbol duration |
| Number of paths) in the -th coherence period | |
| Delay spread of channel path in the coherence period q | |
| Doppler shift in channel path in the coherence period | |
| -th coherence period | |
| Normalized delay dimension in the DD grid | |
| Normalized Doppler dimension in the DD grid | |
| Maximum Doppler frequency of the channel | |
| Maximum delay spread of the channel | |
| Operating frequency | |
| Speed of the object | |
| Speed of light | |
| Tx DD QAM symbols | |
| N-point DFT matrix | |
| M-point DFT matrix | |
| Tx FT symbols | |
| Tx continuous DT signal | |
| Tx windowing function | |
| Identity matrix | |
| AWGN in DT domain | |
| Rx continuous DT signal | |
| Permutation matrix related | |
| Diagonal matrix containing the effect of | |
| Rx FT symbols | |
| FT CIR | |
| Rx windowing function | |
| Rx DD QAM symbols | |
| AWGN in DD domain | |
| Handover | |
| Received signal strength | |
| TTT | Time to trigger |
| Threshold power | |
| Number of OFDM symbols | |
| Number of threshold symbols | |
| Number of OTFS symbols | |
| Minimum square error | |
| Spectral efficiency | |
| Tx power | |
| AWGN power | |
| Channel power | |
| Handover overhead | |
| Average throughput |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mohamed, E.M.; Hussein, H.S.; Alnakhli, M.A.; Hashima, S. OTFS-Based Handover Triggering in UAV Networks. Drones 2025, 9, 185. https://doi.org/10.3390/drones9030185
Mohamed EM, Hussein HS, Alnakhli MA, Hashima S. OTFS-Based Handover Triggering in UAV Networks. Drones. 2025; 9(3):185. https://doi.org/10.3390/drones9030185
Chicago/Turabian StyleMohamed, Ehab Mahmoud, Hany S. Hussein, Mohammad Ahmed Alnakhli, and Sherief Hashima. 2025. "OTFS-Based Handover Triggering in UAV Networks" Drones 9, no. 3: 185. https://doi.org/10.3390/drones9030185
APA StyleMohamed, E. M., Hussein, H. S., Alnakhli, M. A., & Hashima, S. (2025). OTFS-Based Handover Triggering in UAV Networks. Drones, 9(3), 185. https://doi.org/10.3390/drones9030185