
Two-Step Robust Fault-Tolerant Controller Design Based on Nonlinear Extended State Observer (NESO) for Unmanned Aerial Vehicles (UAVs) with Actuator Faults and Disturbances


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
1.1. Related Works
1.2. Research Motivation
1.3. Proposed Method and Contributions
- A two-step robust fault-tolerant controller design method is proposed. The idea of independently designing the main controller and the compensating controller is proposed. The main controller can be designed using any existing classical or modern control theory, primarily focusing on the rapid response and stability for a faultless system.
- A fault compensator designed by using the nonlinear extended state observer (NESO) technique. The NESO-based actuator fault/disturbance compensator can quickly estimate their impact and effectively compensate them, ensuring that the system is stable with degraded performance under fault conditions. In the faultless system, only the main controller is active. The compensator is automatically activated when an actuator fault or disturbance occurs.
- To verify the effectiveness of the method proposed in this paper, a UAV equipped with thrust vector control is chosen as the research object. The model is established for both normal and fault conditions. The main controller is designed using classical control theory, followed by the design of a fault compensation controller based on NESO theory. Simulations for different actuator faults confirm the effectiveness of controller.
2. Problem Formulation and Preliminaries
2.1. Dynamic Modeling of a UAV Equipped with Thrust Vectoring
2.2. Modeling of Aircraft with Actuator Faults and Disturbance
- Stuck or Jammed Failure: Assuming the control surface is jammed at an angle of , then .
- Partial Damage Failure: Assuming the control surface, such as the left elevator, is damaged by percent, then .
- Complete Failure: Assuming the control surface is fluctuating, then .
3. Two-Step Fault-Tolerant Controller Design
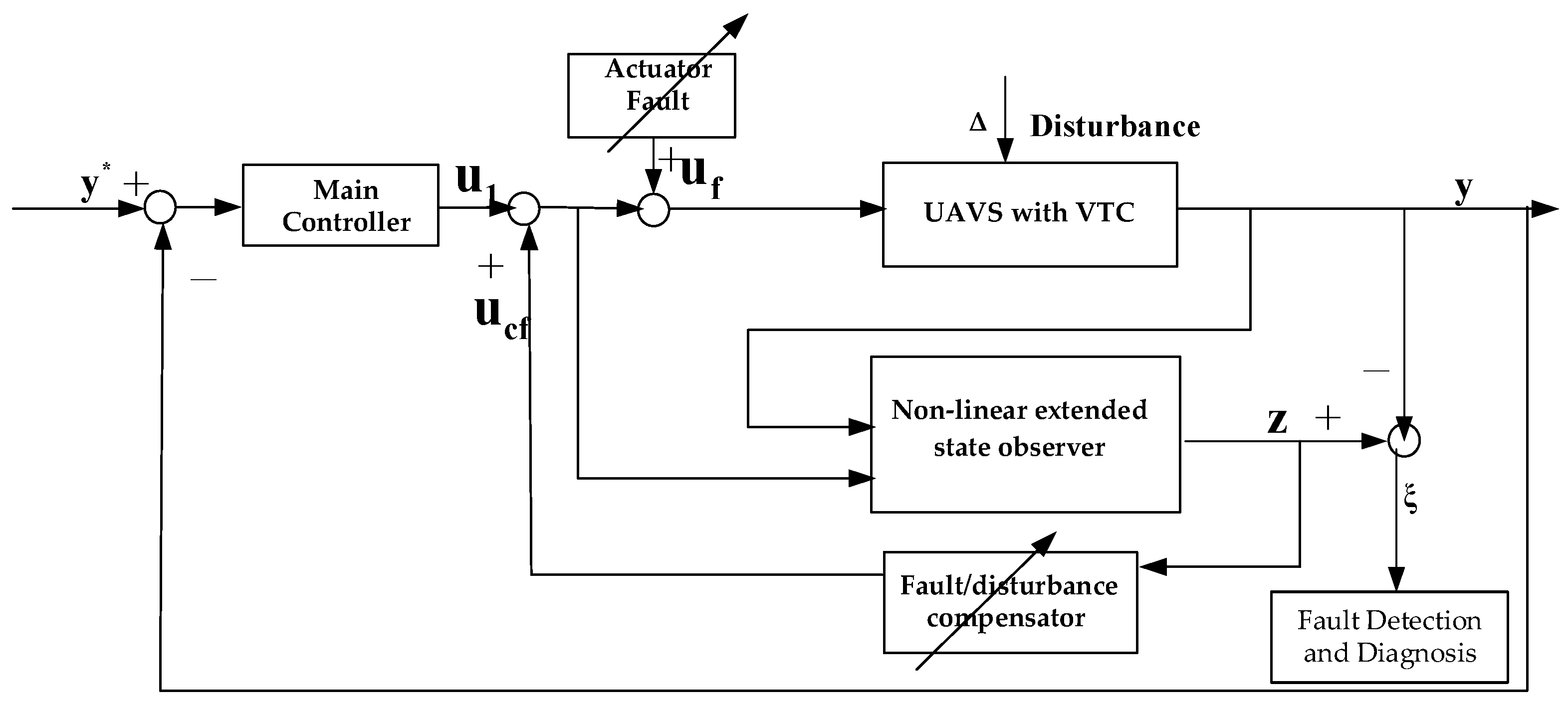
3.1. Fault-Tolerant Controller Structure
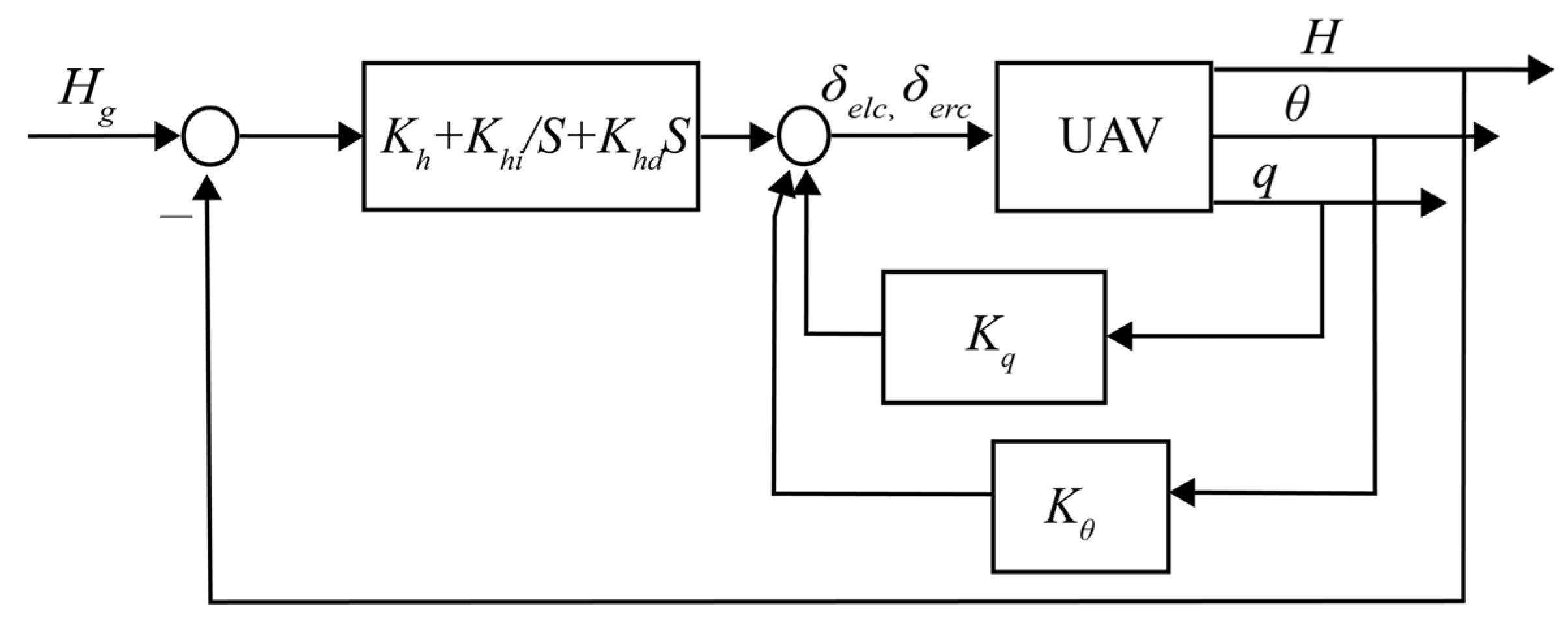
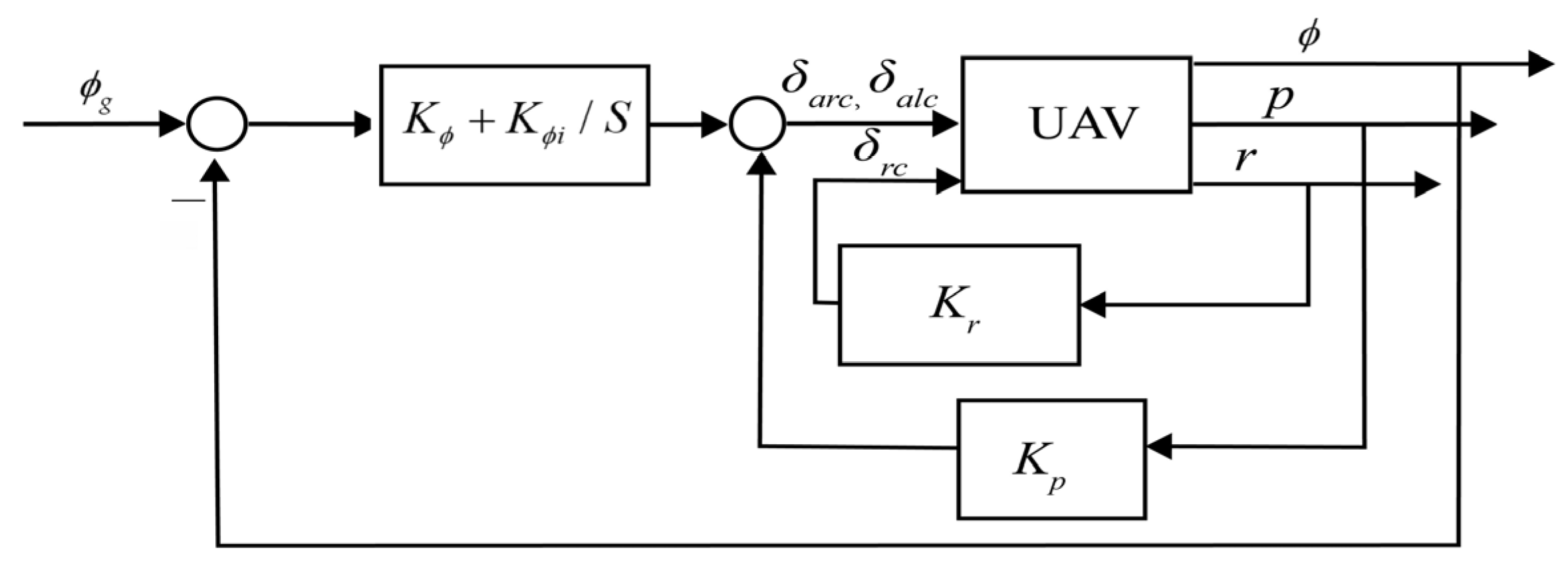
3.2. Main Controller Design
3.3. Fault Estimation Based on Nonlinear Extended State Observer
3.4. Fault Compensator Design
3.5. Closed-Loop Stability
4. Simulation Results and Discussion
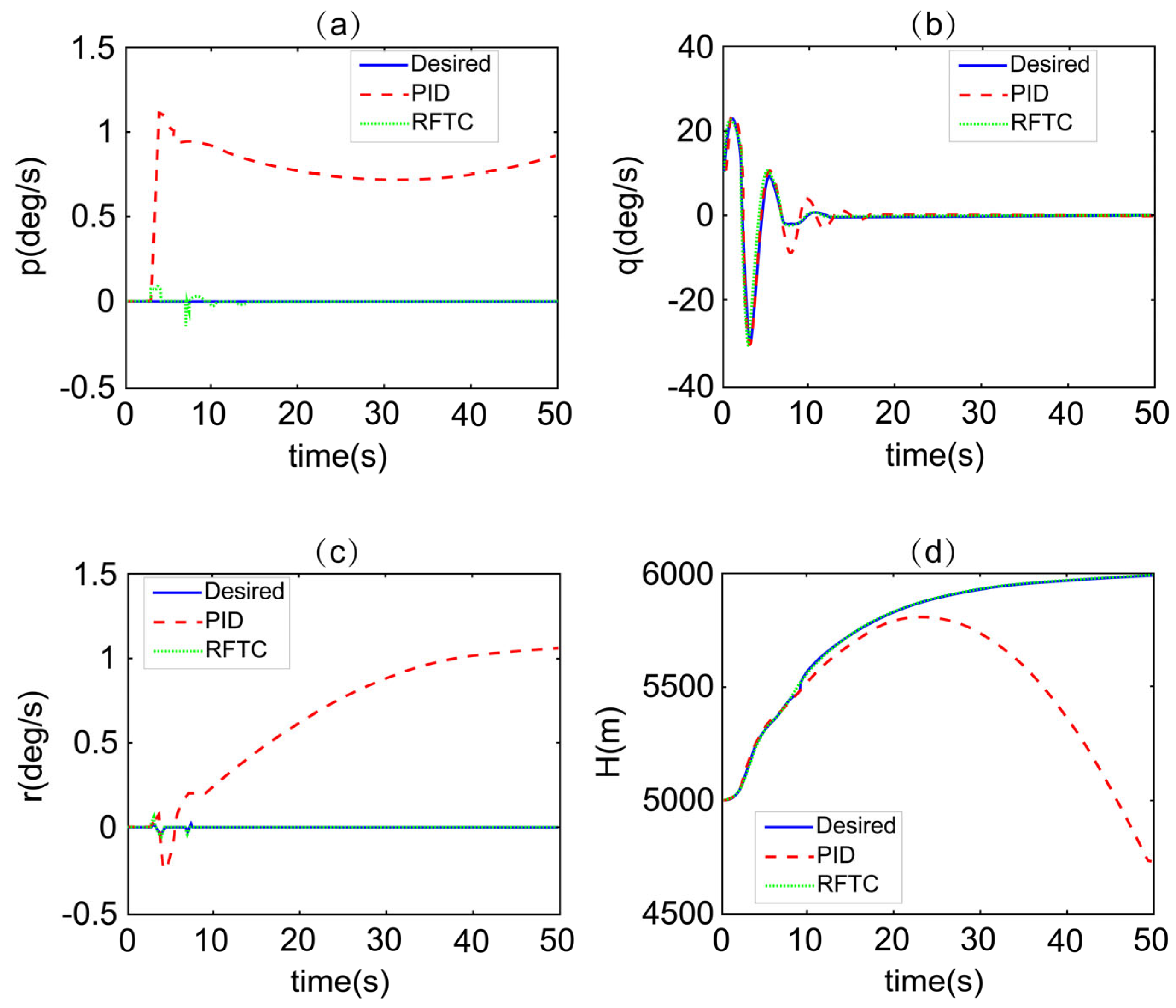
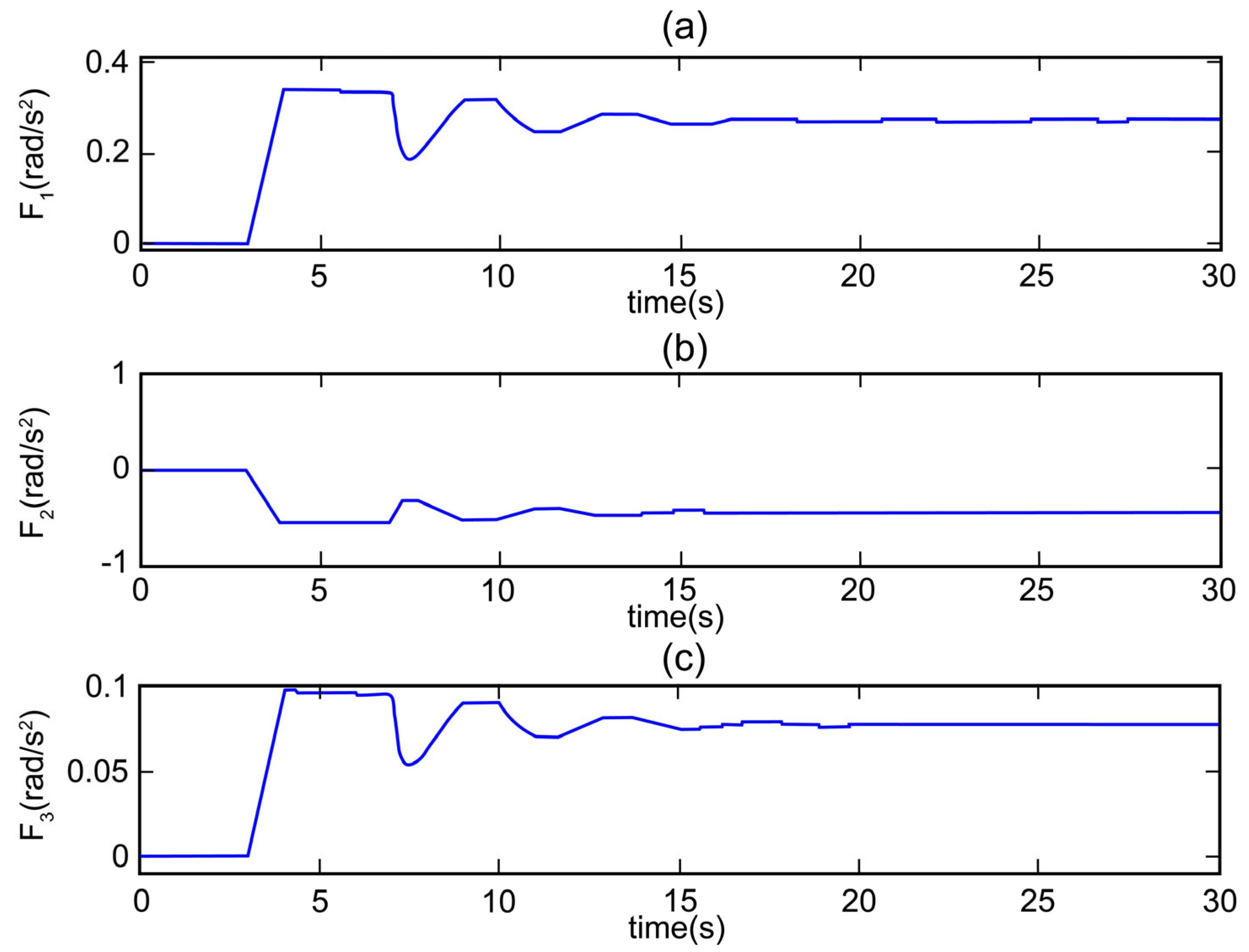
4.1. Case 1: Elevator Fault
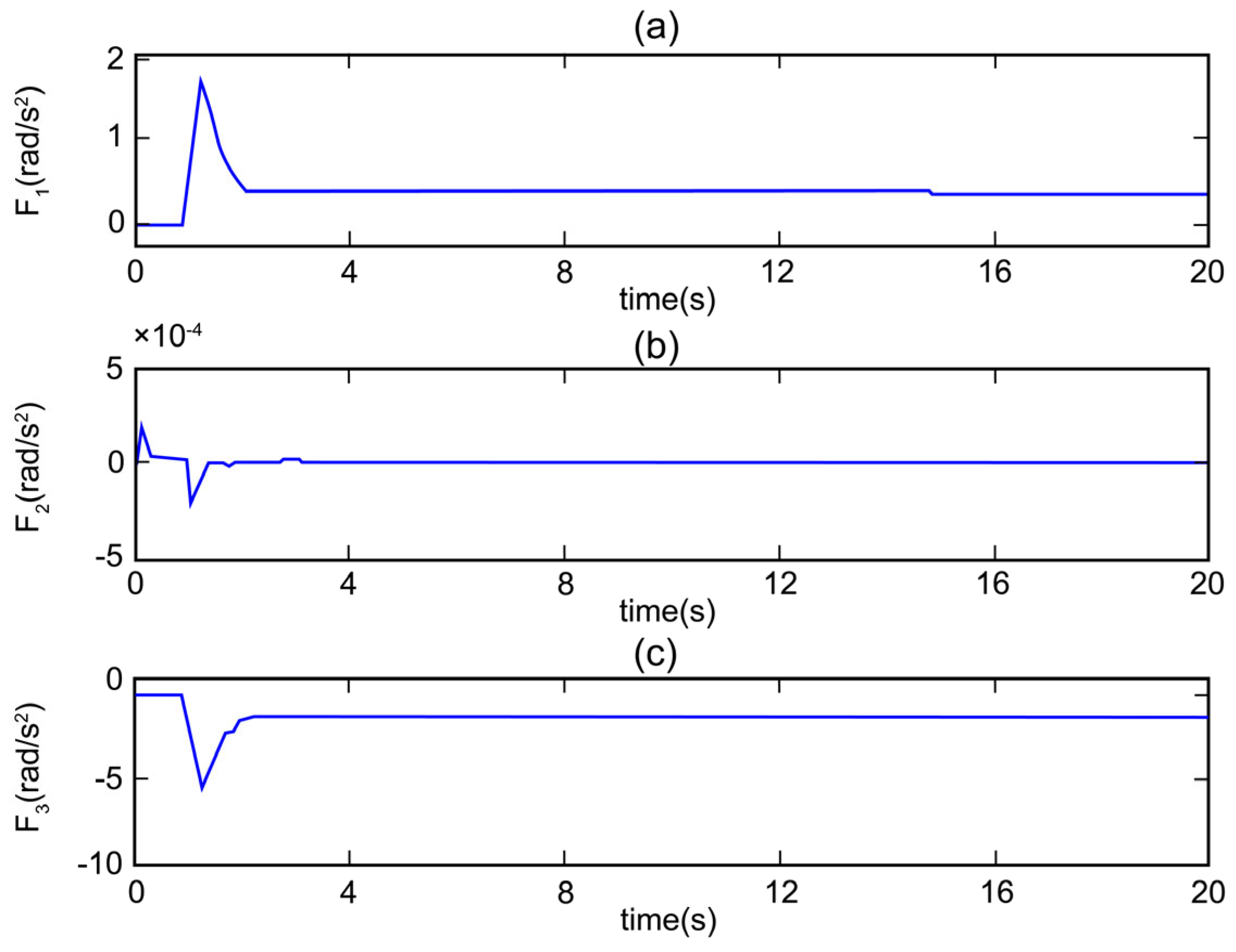
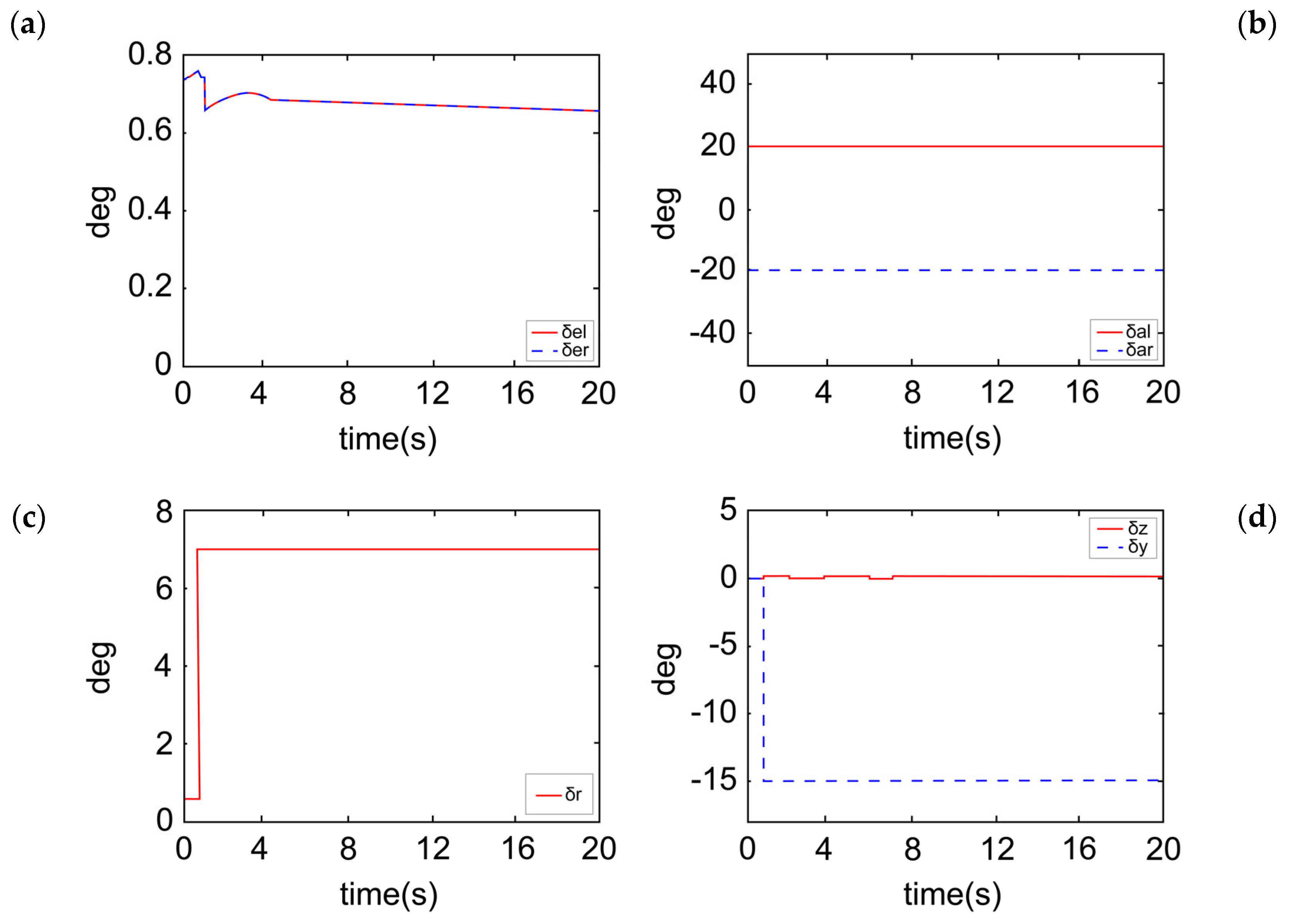
4.2. Case 2: Rudder Fault
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Doornbos, J.; Bennin, K.E.; Babur, Ö.; Valente, J. Drone Technologies: A Tertiary Systematic Literature Review on a Decade of Improvements. IEEE Access 2024, 12, 23220–23239. [Google Scholar] [CrossRef]
- Tsouros, D.C.; Bibi, S.; Sarigiannidis, P.G. A Review on UAV-Based Applications for Precision Agriculture. Information 2019, 10, 349. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Zhang, A.; Xu, H.; Bi, W.; Xu, S. Adaptive Mutant Particle Swarm Optimization Based Precise Cargo Airdrop of Unmanned Aerial Vehicles. Appl. Soft Comput. 2022, 130, 109657. [Google Scholar] [CrossRef]
- Xing, L.; Johnson, B.W. Reliability Theory and Practice for Unmanned Aerial Vehicles. IEEE Internet Things J. 2023, 10, 3548–3566. [Google Scholar] [CrossRef]
- Hou, D.; Su, Q.; Song, Y.; Yin, Y. Research on Drone Fault Detection Based on Failure Mode Databases. Drones 2023, 7, 486. [Google Scholar] [CrossRef]
- Zolghadri, A. A Review of Fault Management Issues in Aircraft Systems: Current Status and Future Directions. Prog. Aerosp. Sci. 2024, 147, 101008. [Google Scholar] [CrossRef]
- Raja, M.S.K.; Ali, Q. Recent Advances in Active Fault-Tolerant Flight Control Systems. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 2151–2161. [Google Scholar] [CrossRef]
- Wu, Q.; Zhu, Q. Prescribed Performance Fault-Tolerant Attitude Tracking Control for UAV with Actuator Faults. Drones 2024, 8, 204. [Google Scholar] [CrossRef]
- Amin, A.A.; Hasan, K.M. A Review of Fault Tolerant Control Systems: Advancements and Applications. Measurement 2019, 143, 58–68. [Google Scholar] [CrossRef]
- Fekih, A. Fault Tolerant Control Design for Complex Systems: Current Advances and Open Research Problems. In Proceedings of the 2015 IEEE International Conference on Industrial Technology (ICIT), Seville, Spain, 17–19 March 2015; pp. 1007–1012. [Google Scholar] [CrossRef]
- Jiang, J.; Yu, X. Fault-Tolerant Control Systems: A Comparative Study Between Active and Passive Approaches. Annu. Rev. Control 2012, 36, 60–72. [Google Scholar] [CrossRef]
- Estrada, M.A.; Fridman, L.; Moreno, J.A. Passive Fault-Tolerant Control via Sliding-Mode-Based Lyapunov Redesign. IEEE Trans. Autom. Control 2024, 69, 6777–6788. [Google Scholar] [CrossRef]
- Srour, A.; Noura, H.; Theilliol, D. Passive Fault-Tolerant Control of a Fixed-Wing UAV Based on Model-Free Control. In Proceedings of the 5th International Conference on Control and Fault-Tolerant Systems (SysTol), Saint-Raphael, France, 29 September–1 October 2021; pp. 109–114. [Google Scholar] [CrossRef]
- Wei, Y.; Sheng, L.; Gao, M.; Ma, Y. Anti-Saturation Fault-Tolerant Control for Markov Jump Nonlinear Systems with Unknown Control Coefficients and Unmodeled Dynamics. Nonlinear Anal. Hybrid Syst. 2023, 50, 101384. [Google Scholar] [CrossRef]
- Ma, Y.; Gao, M.; Sheng, L.; Wei, Y. Active Fault Tolerant Control for Polynomial Nonlinear Systems with Asymmetric State Constraints and Measurement Noise. Nonlinear Dyn. 2023, 111, 14157–14175. [Google Scholar] [CrossRef]
- Shen, Q.; Yue, C.; Goh, C.H.; Wang, D. Active Fault-Tolerant Control System Design for Spacecraft Attitude Maneuvers with Actuator Saturation and Faults. IEEE Trans. Ind. Electron. 2019, 66, 3763–3772. [Google Scholar] [CrossRef]
- Cheng, X.; Gao, M.; Sheng, L.; Wei, Y. Fixed-Time Active Fault-Tolerant Control for a Class of Nonlinear Systems with Intermittent Faults and Input Saturation. J. Process Control 2024, 143, 103319. [Google Scholar] [CrossRef]
- Fan, Z.; Wang, L.; Meng, H.; Yang, C. Data-Based Deep Reinforcement Learning and Active FTC for Unmanned Surface Vehicles. J. Frankl. Inst. 2024, 361, 106960. [Google Scholar] [CrossRef]
- Cheng, X.; Gao, M.; Huai, W.; Niu, Y.; Sheng, L. Fixed-Time Active Fault-Tolerant Control for Dynamical Systems with Intermittent Faults and Unknown Disturbances. Appl. Math. Comput. 2025, 486, 129054. [Google Scholar] [CrossRef]
- Mazare, M.; Taghizadeh, M.; Ghaf-Ghanbari, P.; Davoodi, E. Robust Fault Detection and Adaptive Fixed-Time Fault-Tolerant Control for Quadrotor UAVs. Robot. Auton. Syst. 2024, 179, 104747. [Google Scholar] [CrossRef]
- Liu, S.; Zheng, Z.; Zhu, B.; Guan, Z. Adaptive Fault-Tolerant Control for Attitude Tracking of a Carrier-Based Aircraft Subject to Actuator Faults. IEEE Trans. Aerosp. Electron. Syst. 2024, 60, 6133–6145. [Google Scholar] [CrossRef]
- Wang, B.; Zhu, D.; Han, L.; Gao, H.; Gao, Z.; Zhang, Y. Adaptive Fault-Tolerant Control of a Hybrid Canard Rotor/Wing UAV Under Transition Flight Subject to Actuator Faults and Model Uncertainties. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 4559–4574. [Google Scholar] [CrossRef]
- Chen, Y.; Liang, J.; Wu, Y.; Miao, Z.; Zhang, H.; Wang, Y. Adaptive Sliding-Mode Disturbance Observer-Based Finite-Time Control for Unmanned Aerial Manipulator with Prescribed Performance. IEEE Trans. Cybern. 2023, 53, 3263–3276. [Google Scholar] [CrossRef]
- Guo, F.; Lu, P. Improved Adaptive Integral-Sliding-Mode Fault-Tolerant Control for Hypersonic Vehicle with Actuator Fault. IEEE Access 2021, 9, 46143–46151. [Google Scholar] [CrossRef]
- Li, A.; Liu, S.; Hu, X.; Guo, R. Fault-Tolerant Attitude Control for Hypersonic Flight Vehicle Subject to Actuators Constraint: A Model Predictive Static Programming Approach. IEEE J. Miniaturization Air Space Syst. 2023, 4, 136–145. [Google Scholar] [CrossRef]
- Petrlík, M.; Báča, T.; Heřt, D.; Vrba, M.; Krajník, T.; Saska, M. A Robust UAV System for Operations in a Constrained Environment. IEEE Robot. Autom. Lett. 2020, 5, 2169–2176. [Google Scholar] [CrossRef]
- Zhou, N.; Kawano, Y.; Cao, M. Neural Network-Based Adaptive Control for Spacecraft Under Actuator faults and Input Saturations. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 3696–3710. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Y.; Ren, B. Energy Saving Quadrotor Control for Field Inspections. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 1768–1777. [Google Scholar] [CrossRef]
- Liu, X.; Yuan, Z.; Gao, Z.; Zhang, W. Reinforcement Learning-Based Fault-Tolerant Control for Quadrotor UAVs Under Actuator Fault. IEEE Trans. Ind. Informat. 2024, 20, 13926–13935. [Google Scholar] [CrossRef]
- Kong, C.-Y.; Zhao, D.-J.; Dai, M.-Z.; Liang, B.-G. ESO-Based Event-Triggered Attitude Control of Spacecraft with Unknown Actuator Faults. Adv. Space Res. 2023, 71, 768–784. [Google Scholar] [CrossRef]
- Gong, L.-G.; Wang, Q.; Dong, C.-Y. Spacecraft Output Feedback Attitude Control Based on Extended State Observer and Adaptive Dynamic Programming. J. Frankl. Inst. 2019, 356, 4971–5000. [Google Scholar] [CrossRef]
- Ran, M.; Li, J.; Xie, L. A New Extended State Observer for Uncertain Nonlinear Systems. Automatica 2021, 131, 109772. [Google Scholar] [CrossRef]
- Yang, L.; Liu, L.; Zhang, J. A Bi-Bandwidth Extended State Observer for a System with Measurement Noise and Its Application to Aircraft with Abrupt Structural Damage. Aerosp. Sci. Technol. 2021, 114, 106742. [Google Scholar] [CrossRef]
- Chen, J.; Zhang, F.; Hu, B.; Lin, Q. Quadrotor Fault-Tolerant Control at High Speed: A Model-Based Extended State Observer for Mismatched Disturbance Rejection Approach. IEEE Control Syst. Lett. 2024, 8, 2895–2900. [Google Scholar] [CrossRef]
- Kikkawa, H.; Uchiyama, K. Nonlinear Flight Control with an Extended State Observer for a Fixed-Wing UAV. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1625–1630. [Google Scholar] [CrossRef]
- Ma, X.; Liu, S.; Cheng, H. Civil Aircraft Fault Tolerant Attitude Tracking Based on Extended State Observers and Nonlinear Dynamic Inversion. J. Syst. Eng. Electron. 2022, 33, 180–187. [Google Scholar] [CrossRef]
- Zhou, K.M. A New Approach to Robust and Fault Tolerant Control. Acta Autom. Sin. 2005, 31, 43–55. [Google Scholar]
- Ren, Z.; Wang, W.; Shen, Z. New Robust Fault-Tolerant Controller for Self-Repairing Flight Control Systems. J. Syst. Eng. Electron. 2011, 22, 77–82. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, W.; Chen, Y.; Ren, Z.; Liu, H. Two-Step Robust Fault-Tolerant Controller Design Based on Nonlinear Extended State Observer (NESO) for Unmanned Aerial Vehicles (UAVs) with Actuator Faults and Disturbances. Drones 2025, 9, 183. https://doi.org/10.3390/drones9030183
Wang W, Chen Y, Ren Z, Liu H. Two-Step Robust Fault-Tolerant Controller Design Based on Nonlinear Extended State Observer (NESO) for Unmanned Aerial Vehicles (UAVs) with Actuator Faults and Disturbances. Drones. 2025; 9(3):183. https://doi.org/10.3390/drones9030183
Chicago/Turabian StyleWang, Wei, Yiming Chen, Zhang Ren, and Huanhua Liu. 2025. "Two-Step Robust Fault-Tolerant Controller Design Based on Nonlinear Extended State Observer (NESO) for Unmanned Aerial Vehicles (UAVs) with Actuator Faults and Disturbances" Drones 9, no. 3: 183. https://doi.org/10.3390/drones9030183
APA StyleWang, W., Chen, Y., Ren, Z., & Liu, H. (2025). Two-Step Robust Fault-Tolerant Controller Design Based on Nonlinear Extended State Observer (NESO) for Unmanned Aerial Vehicles (UAVs) with Actuator Faults and Disturbances. Drones, 9(3), 183. https://doi.org/10.3390/drones9030183