Abstract
With the rapid advancement of drone technology, modern drones have achieved high levels of functional integration, alongside structural improvements that include lightweight, compact designs with foldable features, greatly enhancing their flexibility and applicability in photogrammetric applications. Nevertheless, limited research currently explores data collected by such compact UAVs, and whether they can balance a small form factor with high data quality remains uncertain. To address this challenge, this study acquired the remote sensing data of a peri-urban area using the DJI Mavic 3 Enterprise and applied Object-Based Image Analysis (OBIA) to extract high-density buildings. It was found that this drone offers high portability, a low operational threshold, and minimal regulatory constraints in practical applications, while its captured imagery provides rich textural details that clearly depict the complex surface features in urban villages. To assess the accuracy of the extraction results, the visual comparison between the segmentation outputs and airborne LiDAR point clouds captured by the DJI M300 RTK was performed, and classification performance was evaluated based on confusion matrix metrics. The results indicate that the boundaries of the segmented objects align well with the building edges in the LiDAR point cloud. The classification accuracy of the three selected algorithms exceeded 80%, with the KNN classifier achieving an accuracy of 91% and a Kappa coefficient of 0.87, which robustly demonstrate the reliability of the UAV data and validate the feasibility of the proposed approach in complex cases. As a practical case reference, this study is expected to promote the wider application of lightweight UAVs across various fields.
1. Introduction
In recent years, advancements in the miniaturization of electronic devices and composite materials have facilitated the lightweight development of unmanned aerial vehicles (UAVs), offering advantages such as high portability, flexibility, low operational costs, simple and efficient workflows, and fewer legal constraints [1,2]. In the fields of remote sensing and earth sciences, lightweight UAVs have a broad range of applications [3,4], enabling high-quality observation tasks. The collected data exhibit high temporal resolution and very high spatial resolution (VHSR) [5], capabilities that are gradually replacing traditional measurement methods and platforms [6,7]. Many countries and international organizations are now developing laws and regulations to establish the legality, limitations, and operational standards for UAV flights [8,9]. For instance, Chinese “Interim Regulations on the Flight Management of Unmanned Aerial Vehicles” classifies UAVs based on their weight and size, specifying different regulatory measures accordingly. To further promote the use of lightweight UAVs, legal frameworks often feature lower entry barriers, such as not requiring a pilot’s license and simplifying the process for obtaining flight permissions without the need for airspace authorization [10]. These advantages offer significant convenience for practical surveying tasks.
Despite their various advantages, the reliability of data collected by lightweight UAVs remains uncertain, and there is limited understanding of their performance in remote sensing applications [11]. A notable issue for lightweight foldable UAVs is whether they can balance smaller size with high data quality. This question warrants further investigation.
To evaluate the performance of specific UAV models in practical applications, many studies have designed tailored case studies to assess hardware usability as well as data accuracy and quality. For lightweight foldable UAVs, there have been evaluation articles on various models, such as DJI Spark [12], DJI Mini 2 [13], and DJI Mavic 2 Pro [14]. These studies primarily focus on consumer-grade UAVs, evaluating the applicability of their captured photos and videos across different fields. Compared to consumer-grade UAVs, mapping-grade UAVs require additional parameter configurations during operation, and their data must undergo digital image processing to produce usable remote sensing datasets. Therefore, this study emphasizes that the evaluation of mapping-grade UAVs should focus on the practical workflows of surveying, considering whether the generated data can support subsequent analyses. In remote sensing, most existing research uses ground control points (GCPs) within the study area as accuracy reference points to compare the photogrammetric performance of different UAV systems [15,16,17,18]. While such evaluations are meticulously designed (e.g., flight path planning and GCP setup), they typically aim to obtain specific metrics or accuracy parameters, and some further compare these metrics across different devices [17,18]. However, these studies often lack comprehensive assessments of UAVs in real-world and challenging remote sensing scenarios. Regrettably, to date, only a very limited number of case-based evaluations have been conducted for professional-grade UAVs designed for surveying. Without validation in practical applications, it is challenging to accurately assess the performance of new devices, which may hinder the broader adoption of such UAVs. This is precisely the issue we aim to explore in this study.
To assess the reliability of low-altitude remote sensing data from lightweight foldable drones, this study used the extraction of dense buildings in urban villages as a case study. Urban villages refer to rural areas that have been absorbed into urban spaces or administrative boundaries [19]; their formation is closely related to China’s unique urban–rural system, resulting in a mixed spatial structure and landscape [20]. These areas are often associated with issues such as unhealthy living environments, inefficient land use, crowded and disordered physical landscapes, poor housing quality, and severe infrastructure deficiencies [21]. Urban villages are characterized by narrow roads, buildings facing each other, and minimal open sky between structures [22], which imposes high demands on the quality of remote sensing data. Satellite remote sensing, with its lower resolution and complex background interference, struggles to accurately delineate the boundaries of urban villages [23], and it is even more challenging to capture the internal structural features of these areas. In contrast, drones equipped with imaging sensors can operate closer to the target, providing higher-resolution imagery, which serves as a valuable technical means for obtaining VHSR images of urban villages.
In terms of image analysis, Object-Based Image Analysis (OBIA) has become a significant component of remote sensing research related to land cover mapping [24,25]. Distinguished from traditional pixel-based image analysis methods [26], OBIA first segments the input image into local objects, which then serve as spatial units for subsequent analysis, classification, and accuracy assessment [27,28]. Classifier methods are then applied to categorize the spectral characteristics of these segments, identifying the types of ground targets [29], and allowing for the definition of more complex classes based on spatial and hierarchical relationships during the classification process [26]. Integrating UAV systems with OBIA technology offers a flexible and cost-effective means to enhance ground-truth data [30]. Previous studies have shown promising results using this approach in various applications, such as mangrove mapping [31], classification of ecologically sensitive marine habitats [32], extraction of solar photovoltaic panels [33], olive tree canopies [34], weed detection [35], and detecting skips in sugarcane fields [36]. In the context of building extraction, previous studies have employed satellite remote sensing imagery, such as Sentinel-2B [37] and QuickBird [38], to extract buildings. Most of these studies focused on areas with large building separations, where distinguishing between individual buildings was straightforward. However, the lower spatial resolution of satellite imagery makes it challenging to extract buildings in densely populated environments. Conversely, there are relatively few case studies utilizing OBIA to extract buildings from VHSR UAV imagery, especially those employing lightweight foldable drones [39]. Overall, while OBIA has been widely applied to various types of land cover mapping, the differences between study areas imply that the methods and parameter settings effective in one area may yield inconsistent results in another [40]. This provides a feasible point for us to design a specific case study of this approach.
The extraction of dense buildings in urban villages places higher demands on both the reliability of the data and the data processing techniques, presenting a test for the capabilities of lightweight foldable drone data and a new attempt at applying OBIA. In this study, the researchers employed the lightweight foldable DJI Mavic 3 Enterprise drone to capture VHSR imagery of urban villages, utilizing OBIA techniques to extract buildings densely packed with small separations. This study aims to evaluate both the advantages and limitations of this UAV system across the entire workflow of remote sensing data acquisition, processing, and analysis; accordingly, the usability of the drone’s remote sensing data was assessed based on building classification accuracy and extraction results. To achieve this, the following main tasks were carried out in this study:
- (1)
- VHSR images of urban villages were captured using the Mavic 3 Enterprise drone, along with airborne laser point cloud data for evaluating segmentation performance;
- (2)
- The Multi-Resolution Segmentation (MRS) was applied to segment the VHSR images, with a detailed exploration of the segmentation parameters for this case, and then visual comparison and evaluation of the segmentation results were performed using the airborne laser point cloud data;
- (3)
- Classification of image objects using machine learning algorithms, comparing the classification accuracies of three algorithms, namely K-Nearest Neighbor (KNN), Bayes, and Decision Tree, and realizing the extraction of high-density buildings;
- (4)
- The advantages of this UAV are elaborated and discussed in the above work process, and the challenging scenarios in the case of urban village are prospected.
This study is structured as follows: Section 2 introduces the specifications and advantages of the drone, as well as the photogrammetry and data processing workflows. Section 3 describes the object-based methodology and procedures, explaining how the study evaluated the effectiveness and accuracy of the results. Section 4 presents the study’s results, including data quality, comparative results of feature segmentation, and the performance of building extraction. Section 5 discusses the findings of our study, and lastly, Section 6 summarizes the work and presents the study’s conclusions. To clearly illustrate each major step and the associated analytical methods, the framework presented in this paper is depicted in Figure 1.
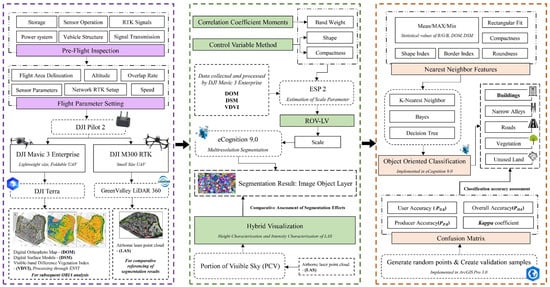
Figure 1.
Framework of This Study.
2. Study Area and Data Sources
2.1. Study Area
Beiting Village is a typical urban village that is located southwest of the Guangzhou Higher Education Mega Center, Panyu District, Guangzhou, Guangdong Province. The area is surrounded by major higher education institutions and research centers in South China, including 12 universities such as Guangzhou University, South China Normal University, Guangdong University of Technology, and Sun Yat-sen University. The study area is relatively flat, covering approximately 398,000 square meters, with a registered population of over 4300. The primary land use types include rural residential land, roads, and vegetation. This area was once primarily agricultural, but with the continued development of the Higher Education Mega Center, it has gradually transformed into a commercial service zone. The local economy now relies mainly on contact-based services targeting the student population, such as accommodation, dining, retail, and entertainment. Along with this industrial shift, local villagers expanded and renovated their buildings and land, resulting in two typical characteristics of Chinese urban villages: high building density and narrow spaces between buildings. The overview of study area is presented in Figure 2.
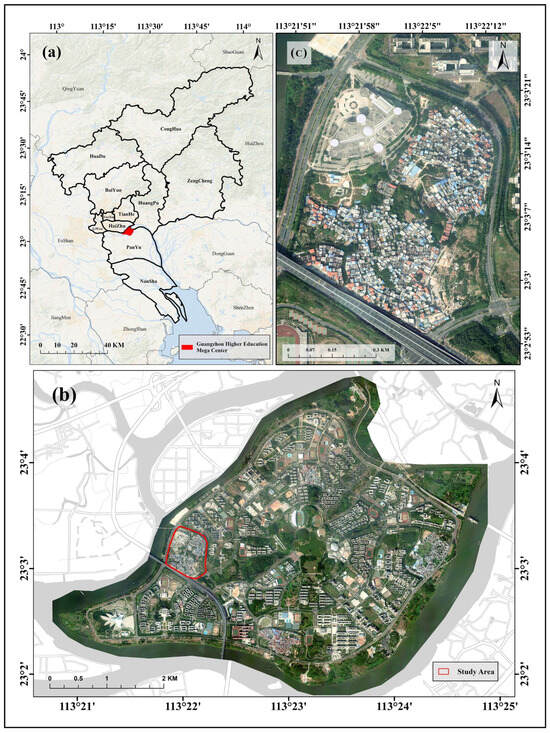
Figure 2.
Overview of the Study Area: (a) Location of Guangzhou Higher Education Mega Center within Guangzhou City; (b) DOM of Guangzhou Higher Education Mega Center; (c) DOM of Beiting Village. Images (b) and (c) were sourced from remote sensing imagery collected by the research team using a fixed-wing UAV, with a resolution of 0.2 m.
2.2. Lightweight Foldable Drone
In this study, the researchers used DJI Mavic 3 Enterprise to collect Digital Orthophoto Map (DOM) data. This drone integrates the airframe and gimbal, equipped with a 20 Mpix visible light sensor that supports a mechanical shutter, and weighs only 915 g. When its four rotors are folded, the entire device can be easily carried in a shoulder bag or a portable case, making it highly convenient for fieldwork (Figure 3). According to the Interim Provisions on the Administration of Unmanned Aircraft Flight, DJI Mavic 3 Enterprise is classified as a lightweight drone, meaning it can fly in airspace below 120 m without requiring a flight application, and the operator does not need a pilot license, significantly lowering the usage threshold. When an RTK module is mounted on top of the drone, it can achieve high-precision, centimeter-level positioning and 1:500 mapping without ground control points. The detailed specifications of this drone are shown in Table 1; the following data were sourced from the DJI official website: https://enterprise.dji.com/cn/mavic-3-enterprise (accessed on 22 January 2025).

Figure 3.
Mavic 3 Enterprise with RTK Module stored in portable case, including six batteries, charging components, and spare parts.

Table 1.
Parameters of the DJI Mavic 3 Enterprise.
2.3. LiDAR Data Acquisition Equipment
In this study, the researchers utilized the high-density, high-precision 3D spatial information from LiDAR point clouds to compare and evaluate the performance of image segmentation. The data acquisition team mounted the LiAir X3-H UAV LiDAR system, developed by Beijing GreenValley Technology Co., Ltd., onto the DJI M300 RTK (Figure 4) to acquire Airborne Laser Scanning (ALS) data. The detailed specifications of this UAV are provided in Table 2, while the specific parameters of the LiDAR system are listed in Table 3. The DJI M300 RTK, an industrial-grade UAV, is widely utilized in surveying and mapping applications. With an empty weight of 6.3 kg, it supports various sensors via the DJI Skyport interface, including visible light, multispectral, hyperspectral, and LiDAR sensors. The M300 RTK is capable of simultaneously carrying one upward gimbal and two downward gimbals. Notably, under current regulatory classifications, the DJI M300 RTK is categorized as a small UAV. While it is permitted to operate in unrestricted airspace without a flight application, operators are required to hold a drone pilot license and secure third-party liability insurance for the UAV.

Figure 4.
DJI M300 RTK Equipped with GreenValley LiAir X3-H LiDAR System.
Table 2.
Parameters of the DJI M300 RTK.
Table 3.
Parameters of the GreenValley LiAir X3-H.
The specifications for the DJI M300 RTK are sourced from the DJI official website: https://www.dji.com/cn/support/product/matrice-300 (accessed on 22 January 2025), and the specifications for the GreenValley LiAir X3-H are obtained from the GreenValley International website: https://www.lidar360.com/archives/portfolio/liair-x3-h (accessed on 22 January 2025).
2.4. DOM Data Acquisition and Processing
The data acquisition team planned the flight path using DJI Pilot 2 (Figure 5), which is installed on the remote controller of the DJI Mavic 3 Enterprise. This software integrates flight path planning and drone control functions, meaning that after planning the flight path, the mission can be directly executed from the remote controller without the need for additional import steps. Once the parameters are configured, the flight control software enables one-click automation of operations. The operator is only required to monitor the status of the UAV and take control in exceptional circumstances. The flight occurred on 16 April 2024, at 14:00, in favorable weather conditions. The ground wind speed was calm, and visibility was high, with a maximum instantaneous wind speed of 4 m/s. The flight altitude was 120 m, the speed was 10 m/s, the forward overlap rate was 80%, and the side overlap rate was 70%. During the flight, the researchers enabled the UAV’s network RTK system and utilized the “Qianxun Find CM” service, which delivers centimeter-level positioning accuracy [41,42,43].
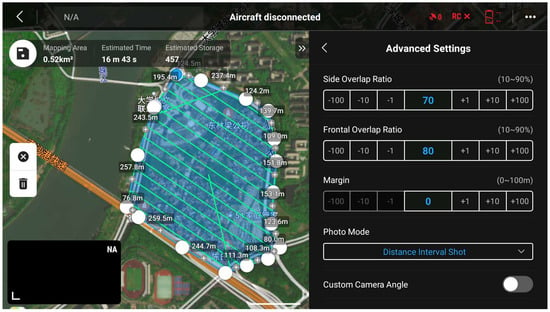
Figure 5.
Flight path planning on DJI Pilot 2.
After the flight, the researchers processed the data using DJI Terra 4.1. This software quickly generates high-precision DOM and digital surface models (DSM) from the images and offers options to optimize image quality, such as tiled output, even lighting, and haze removal, all through one-click operations. Once the data from the Mavic 3 Enterprise are exported, the researchers simply select the root directory of the flight data in the software, and Terra automatically recognizes the photos and extracts the corresponding POS data. Additionally, since this study employed a ground control point-free (GCPs-free) workflow, there was no need to mark GCPs within Terra, greatly simplifying the data production process, lowering the technical barrier, and increasing efficiency [44,45]. More information about DJI Terra can be found on the official website: https://enterprise.dji.com/cn/dji-terra (accessed on 22 January 2025).
2.5. ALS Data Acquisition and Processing
Similarly, the data acquisition team used DJI Pilot 2 on the remote controller of the M300 RTK to plan the flight path for LiDAR point cloud data collection, which was performed at 15:30 on the same day. The flight altitude was 80 m, the flight speed was 6 m/s, the forward overlap rate was 80%, and the side overlap rate was 70%. The airborne LiDAR point cloud data were collected on the same day. During the flight, the researchers also utilized the Qianxun Find CM service and additionally set up a GPS ground static base station, which was activated 15 min before the drone took off and remained active for 15 min after landing.
After the flight, the data from the simultaneously established base station was used to correct the drone’s GNSS trajectory, and point data in LAS file format were generated based on the corrected trajectory. The LAS data then underwent initial processing, including adjustment, resampling, denoising, classification, and ground-point normalization. After preprocessing, the Portion of Visible Sky (PCV) algorithm was applied to enhance the visualization of point cloud intensity [46]. All these processing steps were performed using LiDAR 360 7.0 software from Beijing GreenValley Technology Co., Ltd. More information about LiDAR 360 can be found on the official website: https://www.lidar360.com/archives/5135.html (accessed on 22 January 2025).
3. Methods
3.1. Multiresolution Segmentation
Image segmentation is a critical step in OBIA, as effectively dividing the image into non-overlapping objects is a key prerequisite for further feature extraction and refined classification [26]. Multiresolution Segmentation (MRS) follows a bottom-up approach that minimizes heterogeneity by iteratively merging objects [47], and the algorithm flowchart for MRS is shown in Figure 6.
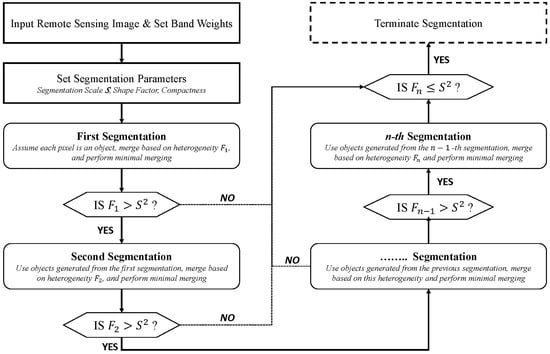
Figure 6.
MRS Workflow Diagram.
Four primary parameters—band weight, shape, compactness, and scale—are essential in determining segmentation outcomes. In this study, the RGB bands from DOM data were combined with the VDVI, a vegetation index suitable for visible light UAV imagery [48,49,50,51], as well as DSM data to reflect height variations. The correlation matrix of these bands was computed, and greater weight was assigned to bands with lower correlation coefficients, as these provide additional information for segmentation. The VDVI, calculated in ENVI 5.3, is expressed as follows:
where , , represent the radiance values of the red, green, and blue bands, respectively.
In MRS, heterogeneity is governed by shape and color parameters, with their sum constrained to 1 [52,53]. Shape determines the balance between spectral and geometric features, while compactness influences object boundary smoothness. The shape parameter was varied from 0.1 to 0.9 and compactness from 0.1 to 0.9 in separate controlled experiments to identify optimal parameter combinations for segmenting dense urban buildings, referencing methods from El-naggar et al. [54] and Elsebaei et al. [55].
The segmentation scale determines the granularity of image objects, making it a crucial parameter [26]. To reduce subjectivity, the ESP2 was used to identify optimal scale thresholds, which helped determine the most effective scale for distinguishing dense urban features within the 200–400 range. This tool analyzes changes in Local Variance () and computes the Rate of Change of LV () to detect scale peaks [56,57,58,59]. The expression for is as follows:
where and represent the local variance of homogeneity at levels and respectively. When a peak appears in the curve, the corresponding scale is considered an ESP. Given the presence of multiple land cover types in the imagery, the ROC curve often displays more than one peak.
To address occlusion and improve visualization, the Portion of Visible Sky (PCV) algorithm was applied to point cloud data [46]. This method normalizes intensity values to 0–255, enhancing boundary clarity and improving land cover classification accuracy. By combining height and intensity features, the PCV algorithm facilitated a robust evaluation of segmentation performance.
3.2. Object-Oriented Classification
Feature selection is a crucial step in the classification process, as it can significantly enhance classifier performance [60]. In this study, the classifier was trained using the average, maximum, and minimum values from five bands, including three visible light bands from the DOM, the VDVI to distinguish vegetation from non-vegetation land cover, and the DSM, which helped identify individual buildings within dense clusters through height differences. For the complex geometric features of urban village surfaces, geometric features such as shape, boundary index, rectangular fit, circularity, and compactness were used to train the classifier. A comprehensive description of the selected object features is provided in Table 4.
Table 4.
Calculation Methods and Descriptions of Nearest Neighbor Features.
Selecting a classifier with high fitting accuracy is essential for precise object-based target feature extraction [61]. In this study, three well-established algorithms—K-Nearest Neighbor (KNN), Bayes, and Decision Tree—were employed to classify image objects. KNN is an intuitive classification method that assumes a point belongs to the same class as the majority of its neighboring sample points, classifying based on sample categories, decision rules, the value of K, and distance metrics [62]. Bayes, based on Bayes’ theorem, is a probabilistic classifier that calculates the posterior probability of an object using its prior probability, assigning it to the class with the highest posterior probability [63]. The Decision Tree algorithm uses a top-down recursive method, splitting data based on the principle of maximum information gain, with internal nodes representing attribute tests, leaf nodes corresponding to specific classes, and branches representing the output of attribute tests, constructing a tree where information entropy decreases most rapidly [64].
Land cover was classified into five categories: Buildings, Narrow Alleys, Roads, Vegetation, and Unused Land. Sample points with distinct land cover characteristics were selected in ArcGIS Pro 3.0, and classification was performed in eCognition 9.0. After classification, validation sample points were created within the study area, ensuring that the minimum distance between any two points was at least 10 m. The true land cover types of these points were manually assigned through visual interpretation, all carried out in ArcGIS Pro 3.0. The accuracy of different classifiers was evaluated using the confusion matrix, with metrics User Accuracy (), Producer Accuracy (), Overall Accuracy (), and coefficient. The expressions for these coefficients are as follows:
In the above expressions, represents the diagonal element, which is the number of correctly classified instances for the i land cover class. represents the sum of the i row, indicating the total number of instances classified as the i land cover class. represents the sum of the j column, indicating the actual number of instances in the j land cover class. represents the total number of samples, and represents the product of the row and column sums for i and j, which corresponds to the total number of products. Among these indicators, concerns the correctness of the “predicted” class, measuring the proportion of samples classified as a certain class that actually belong to that class. focuses on the correct identification of the “true” class, measuring the proportion of samples that actually belong to a specific class and are correctly classified. is the proportion of correctly classified samples across all categories relative to the total number of samples, representing the overall accuracy of the classification system. is used to assess the consistency between the classification results and random classification. Its value ranges from −1 to 1, with 1 indicating perfect agreement. The closer the coefficient is to 1, the better the classification result, while a value of 0 indicates the same as random classification results.
4. Results
4.1. UAV Data Processing Results
In this study, 457 images captured by the DJI Mavic 3 Enterprise were processed. The images demonstrated accurate exposure, consistent brightness, appropriate white balance, and optimal sharpness, and there was no noticeable defocus and no blurring, distortion, or warping caused by sensor instability. Image distortion and vignetting had a minimal impact on the overall image quality.
The spatial resolution of the DOM was 0.028 m (as shown in Figure 7), which not only clearly displayed the building outlines but also revealed internal details, such as roof structures, water heaters, and canopies, providing detailed texture information for further classification. However, compared to full-frame mapping cameras, the data from this UAV showed some reduction in sharpness, increased noise, and even a loss of detail in certain areas. This was particularly evident in narrow alleys within the study area, where the DOM appeared entirely black. Additionally, slight edge distortions were observed in some densely built-up areas.

Figure 7.
Overall DOM and Local Detail of the Study Area.
DSM reveals the distribution of surface heights across the area (as shown in Figure 8). High-value regions of DSM (represented in red and pink) are primarily located in the northeast and central areas, corresponding to vegetation, as well as two cylindrical buildings in the northern commercial center. Within the urban village, roads are displayed as continuous blue regions in DSM, which stand out distinctly from other surface features. In areas with dense buildings, DSM clearly outlines rectangular shapes of different colors, indicating height variations between buildings, providing essential support for accurate image segmentation.
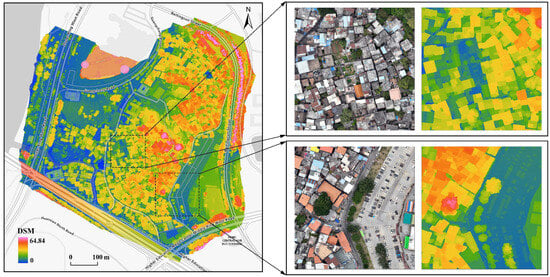
Figure 8.
Overall DSM and Local Comparison of the Study Area.
VDVI reveals notable variations in vegetation (as shown in Figure 9). High-value regions of VDVI (represented in green) align well with the actual distribution of vegetation, primarily concentrated along the outer roads and the central area of the urban village. The index also clearly highlights the fragmented and smaller patches of vegetation within the urban village. However, a circular high-value area in the VDVI, located at the northern shopping center, corresponds to a helicopter landing pad with a green surface, representing a significant deviation in the practical application of VDVI in this case.
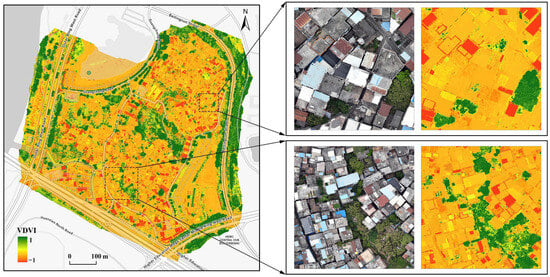
Figure 9.
Overall VDVI and Local Comparison of the Study Area.
In this study, the laser point cloud data were used as a reference standard to evaluate the segmentation performance. In scenarios with closely spaced buildings, height is posited to serve as a key distinguishing feature, aiding in determining whether a structure is a distinct building. Although the DSM provides an initial indication of surface elevation, its visual output remains insufficient as a benchmark for comparative evaluation. To address this, we assigned true-color values to the point cloud data and displayed the full and local LAS for the study area in Figure 10. When viewed from a slightly tilted side perspective, the height differences between buildings are clearly observable, presenting a level of detail far superior to that of the two-dimensional DSM. This enhanced depiction provides a more reliable reference.
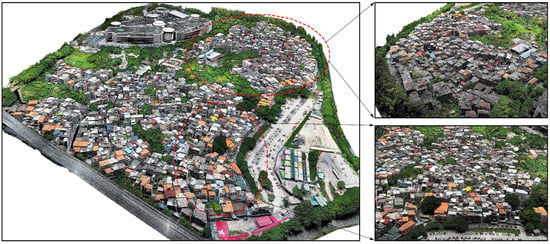
Figure 10.
Overall LAS and Local Detail of the Study Area.
4.2. Multiresolution Segmentation
The correlation matrix for the five bands is shown in Table 5. The results indicate that the correlation between VDVI and DSM is minimal, and the correlation between DSM and the other bands is also low. Therefore, it is concluded that VDVI and DSM provide additional information for vegetation and building segmentation in the study area. In this study, the weights of the red, green, and blue bands were each set to 1, the weight of the VDVI band was set to 1.5, and the weight of the DSM band was set to 2.
Table 5.
Correlation Coefficient Matrix for Each Band.
Eighteen controlled variable experiments were conducted to evaluate the effects of and . Over-segmentation occurred when the was set between 0.1 and 0.6, while under-segmentation was observed with settings between 0.8 and 0.9. The optimal segmentation for individual buildings, where object boundaries closely aligned with actual building edges, was achieved at a of 0.7, as illustrated in Figure 11a. Consequently, the shape was set to 0.7 for subsequent analyses.
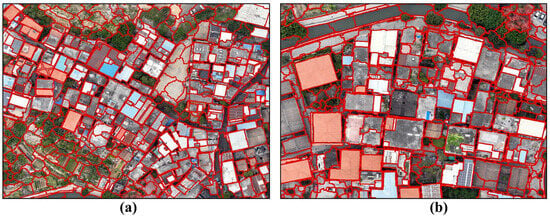
Figure 11.
Determination of Shape and Compactness Using the Control Variable Method: (a) Shape Set to 0.7; (b) Compactness Set to 0.8.
Regarding , segmentation results were overly fragmented when set between 0.1 and 0.7, with object boundaries failing to align neatly with building edges. At a setting of 0.9, the boundaries were more compact and rectangular but resulted in under-segmentation. Optimal alignment with individual building edges was achieved with a setting of 0.8, as shown in Figure 11b. Therefore, the compactness was set to 0.8 for subsequent analysis.
ESP2 was used to determine the segmentation scale, with the results shown in Figure 12. The segmentation scale corresponding to the peak of the ROC-LV can be regarded as the optimal MRS parameter for a feature. As seen, within the segmentation scale range of 200–400, the peaks of the blue curve correspond to segmentation scales of 220, 250, 280, 320, 340, and 390.
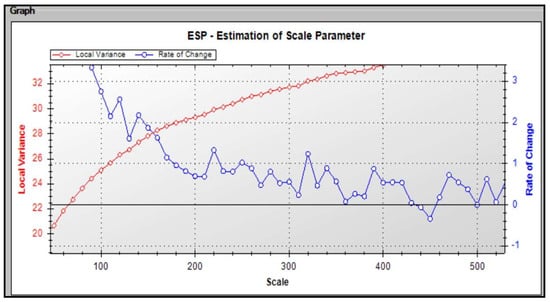
Figure 12.
ESP2 Results.
Using the mentioned above, along with the defined , and , six MRS experiments were conducted. These experiments aimed to visually assess and confirm the optimal segmentation scale for extracting high-density buildings. The experimental results indicated that at a of 220, 250, and 280, the building objects were overly fragmented, showing signs of over-segmentation. When the exceeded 340, the images exhibited under-segmentation. Thus, the optimal segmentation for building extraction in the study area was determined to be 320, and the experimental results using this parameter are shown in Figure 13.
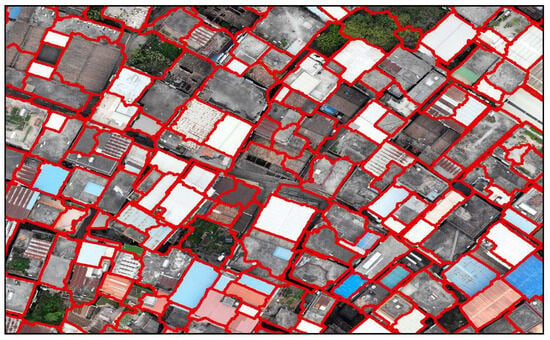
Figure 13.
Scale Set to 320.
The previously determined , , and parameters were applied to conduct MRS on the entire dataset, which was implemented using the eCognition 9.0. After segmentation, the MRS results were compared with the point cloud visualized using a combination of “height attributes + intensity attributes.” A comparison of four sets of local details is shown in Figure 14. It was observed that the LAS point cloud processed through PCV effectively highlighted the edges and shapes of buildings. Even in areas with closely arranged buildings, the 3D representation capability of the point cloud accurately distinguished differences between buildings, providing strong comparative support for the accuracy of the segmentation results. As shown in Figure 14, the comparison indicates that the overall display of the LAS is highly consistent with the MRS results in terms of building edges and overall structure. This is particularly evident in the high degree of overlap in the shape, size, and layout of buildings. This consistency demonstrates that the MRS results accurately reflect the true structure of the buildings, validating the feasibility of the proposed technical workflow in urban village scenarios. However, based on the point cloud visualization, the buildings equipped with canopies or solar panels exhibited small areas of over-segmentation. This issue arises because these installations have significantly different textures from the rooftops and possess certain heights, causing them to be mistakenly identified as separate buildings during the segmentation process. Additionally, under-segmentation was observed in buildings with brick-tile structures or where rooftops were cluttered with objects or had collapsed, resulting in significant texture differences within the roof. In these cases, the object edges appeared irregular.
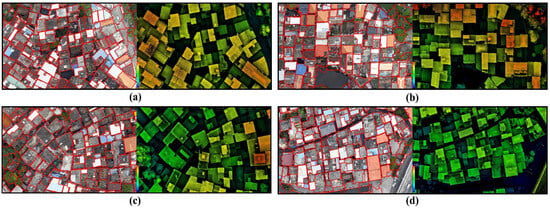
Figure 14.
Comparison of MRS results with hybrid visualization of LAS, (a–d) illustrate the comparison results of four different high-density building areas.
4.3. Classification and Extraction
The overall accuracy of the KNN algorithm reached 91%, with a Kappa coefficient of 0.87, indicating a high consistency between the classification results and the sample data. The classification accuracy for the building, vegetation, and road categories all exceeded 90%. The errors primarily originated from misclassifying small portions of idle land as roads or buildings and narrow alleys as buildings or green spaces. The confusion matrix for the KNN classification is shown in Table 6.
Table 6.
Confusion Matrix of the K-Nearest Neighbor (KNN) Algorithm.
The overall accuracy of the Bayes algorithm reached 86%, with a Kappa coefficient of 0.81, showing a good match between the classification results and the sample data. The producer accuracy for vegetation reached 96%, while the classification of idle land, roads, and buildings was slightly less accurate but still maintained an accuracy above 84%. The errors mainly arose from minor misclassifications between idle land, roads, and narrow alleys. The confusion matrix for the Bayes classification is shown in Table 7.
Table 7.
Confusion Matrix of the Bayes Algorithm.
The overall accuracy of the Decision Tree algorithm reached 83%, with a Kappa coefficient of 0.77, indicating a general alignment between the classification results and the sample data. However, the classification of idle land, roads, and buildings was somewhat lacking, with most errors stemming from misclassification between these three land-use types, particularly the frequent misclassification of idle land as roads. The confusion matrix for the Decision Tree classification is shown in Table 8.
Table 8.
Confusion Matrix of the Decision Tree Algorithm.
In terms of classification accuracy, KNN proved to be the most suitable for extracting high-density buildings in urban villages. The building extraction results for the entire study area are shown in Figure 15. Based on the classification accuracy evaluation and the visual results, the building extraction performed well, demonstrating the feasibility and effectiveness of combining lightweight foldable UAV data with the OBIA workflow.
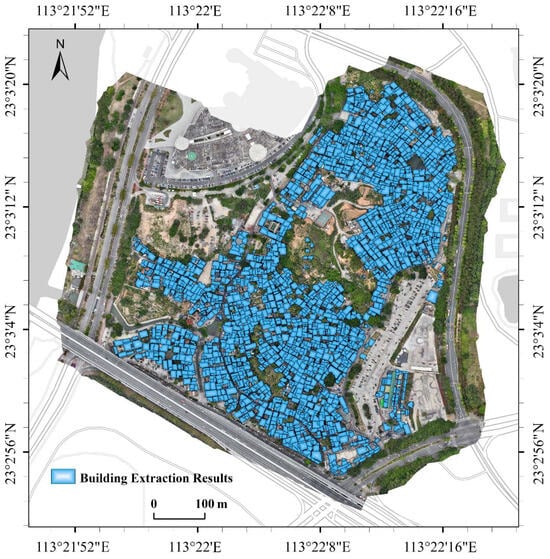
Figure 15.
Results of Building Extraction Using K-Nearest Neighbor (KNN) Method.
5. Discussion
5.1. Advantages and Development Prospects of Lightweight Surveying and Mapping UAVs
This study highlights the significant improvements in mobility and flexibility that lightweight UAVs bring to fieldwork. Compared to traditional UAV systems, such as the M300 small UAV used for airborne LiDAR point cloud collection, which requires carrying four batteries (20 kg), the UAV itself (8 kg), and airborne sensors (2 kg), lightweight foldable UAVs greatly reduce transportation and labor costs. Besides their compactness, the development of lightweight airborne hardware modules also improves fieldwork efficiency. For example, the traditional GCPs method involves carrying GNSS receivers and manually marking control points in the images, which is inefficient. In contrast, the RTK module used in this study weighs only 24 g and eliminates the need for ground control points, meeting 1:500 mapping accuracy requirements [44] and significantly reducing GCP setup workload [15,16,17,18]. Furthermore, the weight of sensors is crucial to UAV design and aerodynamic performance [65]. While consumer-grade digital cameras were previously used for capturing very high spatial resolution (VHSR) images [66], resulting in heavy takeoff weights, the Mavic 3 Enterprise in this study features a lightweight visible light sensor, integrated with the gimbal and UAV as a single system. This integrated solution, first applied to consumer-grade UAVs, has since been successfully implemented on foldable platforms like the DJI Mavic 3M and DJI M30T, offering high portability in professional applications. Sensor miniaturization is key to achieving lightweight UAV designs. However, some sensors, such as LiDAR, hyperspectral, and synthetic aperture radar, remain large and heavy, requiring larger UAV platforms with sufficient takeoff weight [6]. As sensor technology advances, we expect UAVs to become even more portable, expanding their applications across various industries.
Regarding regulatory restrictions, lightweight UAVs are subject to fewer controls, reducing the time flight operators need to secure airspace and coordinate with authorities. To clearly demonstrate the advantages of lightweight foldable drones in practical operations, Table 9 presents the operational costs of the Mavic 3 Enterprise in this study, with the M300 RTK, also used in the case study, serving as a comparison group. The methodology for quantifying these costs is detailed in Table 10.
Table 9.
Comparing the cost of Mavic 3 Enterprise and M300 RTK in this case.
Table 10.
Costing method explanation.
The results indicate that lightweight foldable drones offer substantial economic benefits, particularly in terms of equipment procurement and associated hardware. Unlike the M300 RTK, which requires additional purchases such as onboard sensors and battery boxes, the Mavic 3 Enterprise integrates the camera with the aircraft body, significantly reducing procurement expenses. Operationally, the depreciation cost of batteries also highlights a major difference. Larger drones rely on more expensive batteries and often require multiple units per flight, leading to higher overall depreciation costs. For instance, the M300 RTK necessitates the simultaneous use of two high-cost batteries, whereas the Mavic 3 Enterprise operates efficiently with a single, more affordable battery. In practice, the cost of transporting equipment to the job site is a significant expense. The compact and lightweight design of the Mavic 3 Enterprise allows it to be transported in a single handheld carrying case, as shown in Figure 3. In contrast, the M300 RTK requires the transport of around 20 kg of batteries and battery boxes, as well as additional on-board sensors, resulting in a six-fold difference in transport costs between the two in this case. Additionally, lightweight drones demonstrate lower costs in equipment deployment, operational maintenance, and personnel training. They also offer advantages in terms of reduced legal and regulatory burdens, which are often harder to quantify but significantly enhance the efficiency and feasibility of their application.
In the previous sections, several references and policy regulations were cited to explain that lightweight UAVs have a low operational threshold, which enhances the flexibility of flight operations. However, this does not imply that the operators can ignore regulatory constraints when using lightweight UAVs. For example, in China, all civilian UAVs must be registered with the Civil UAV Comprehensive Management Platform through their serial number (SN). In the event of a violation of airspace regulations, such as unauthorized entry into controlled airspace or exceeding altitude limits, the registered information will be used to contact the responsible party. It is important to note that while lightweight UAVs offer more flexible flight capabilities, entering sensitive airspace can pose serious safety risks [67]. Special no-fly zones, such as airports and military facilities, must be observed, and operators should thoroughly understand the regulations governing the flight area and submit flight applications to relevant authorities before flying. In this study, the flight altitude was set to 120 m, which is the maximum height that does not require airspace approval according to the “Interim Provisions on the Administration of UAV Flights.” Nevertheless, the researchers still contacted the management committee of Beiting Village and the local police station before the flight to inform them of our flight time and area. It is believed that in the future, the threshold for low-altitude airspace usage and the difficulty of obtaining approval should be relaxed, which would require policy reforms from relevant authorities. At the same time, UAV operators should strictly adhere to regulations and establish communication with management authorities prior to flights, even if some application procedures may not be strictly necessary.
In terms of data evaluation, previous studies have already assessed the positional accuracy of the data [44]. Therefore, this research primarily focuses on the usability of the data from a remote sensing analysis perspective, evaluated through case studies. Based on the DOM imagery collected and generated in this study, as well as the building extraction results from the case study, despite the small size of the Mavic 3 Enterprise, it still demonstrated the capability to capture high-precision and high-quality remote sensing data. The UAV was able to clearly display detailed textures in urban villages, such as canopies, water heaters, and solar panels. Although ground control points were not used to validate the positioning accuracy, it was observed that, with the support of the “Qianxun” service, the spatial location data collected by the two UAVs (DOM and LAS) exhibited a high degree of consistency. This consistency provided a solid foundation for subsequent data fusion and analysis. The efficiency of data processing was also a focus of the study. Compared with software like Pix4D and PhotoScan, DJI Terra exhibited higher compatibility for processing and analyzing the data, with automatic image recognition and simplified workflows. This suggests improved processing efficiency [44] and a lower learning curve for users. It is worth noting that these images were collected under favorable weather conditions, and the impact of environmental variations on the data has yet to be studied. For instance, further research is needed to determine whether high wind speeds could cause deviations in flight paths, leading to data that do not meet preprocessing requirements, or whether poor lighting conditions could reduce image resolution. Moreover, the consistency of data under varying environmental conditions remains to be explored.
5.2. Challenges and Future Prospects in MRS for UAV Data
In terms of OBIA technology, MRS is one of the most widely used and successful remote sensing image segmentation algorithms [68], with a large body of literature available for reference, and it can be conveniently implemented in eCognition software. This study not only validates the data but also provides a complete and practical workflow as a reference. Since there are no previous studies on lightweight foldable UAV data, we conducted 24 experiments adjusting the , and to determine the optimal segmentation parameters for this study’s specific context. However, most existing papers do not provide detailed guidelines for setting MRS parameters [26,28,40], which is considered an oversight in studies evaluating new types of data. Therefore, the results for the MRS parameter are provided in Section 4. Additionally, it is important to note that a scientific and objective quantitative method remains to be explored for determining the MRS band weights. Moreover, the optimal values for MRS parameters are often determined through repeated trials [54,69,70]. While these operations are easy to implement, repetitive work can be time-consuming. To address this, the ESP2 tool was used to minimize subjective human influence and reduce the number of repetitive experiments, although fully automated segmentation without human intervention was not achieved in this study. Regarding the evaluation of segmentation results, while many studies rely on quantitative methods to assess segmentation performance [55,70,71,72], no single evaluation method applies universally across all segmentation scenarios [69,73,74]. Therefore, many studies resort to a visual subjective assessment of segmentation results [75]. To this end, efforts were made to fully utilize the intensity and height features from the LiDAR point cloud to highlight the differences between dense buildings. Based on the PCV results, this approach more effectively emphasizes building contours. Compared to relying solely on visual subjective evaluation, this is considered a more intuitive and efficient method for visually assessing segmentation results.
In the practical case of extracting urban village buildings, this study demonstrates, on one hand, the high-resolution capabilities of UAV data, clearly highlighting the dense spacing between buildings and the narrow roads characteristic of urban villages [22], which are challenging to capture using satellite remote sensing data [39]. On the other hand, while the data proved sufficiently reliable, the increased surface texture details posed significant challenges for data analysis. It was found that the difficulty of extracting urban village buildings lies not only in their narrow spacing but also in the complex texture features within individual buildings. Previous studies [33,36,37,38] have successfully extracted features in areas with low building density, achieving high classification accuracy and providing precise surface feature counts. However, replicating such results in the case study of this research proved challenging, particularly in areas with complex surface conditions. These include buildings completely covered by multiple canopies, collapsed structures, or cases where the spacing between buildings is effectively zero. In such scenarios, even visual interpretation struggles to determine whether the features represent a single building or multiple structures.
Overall, this study demonstrates the potential application of the lightweight UAV + OBIA solution in complex land cover environments. As UAVs continue to become lighter and OBIA methods mature in high-resolution image processing, this solution is expected to be applied in more complex scenarios, including fine land cover extraction in mountainous terrains, urban renewal, and monitoring of aging urban areas, as well as post-disaster rapid assessments and emergency responses. These scenarios may include environments where large UAVs could not previously operate, tasks requiring high flexibility and immediacy, or cases where pixel-based analysis is inadequate.
5.3. Defects and Prospects: Addressing the Complex Urban Village Scenario
As mentioned in Section 5.2, due to the complex and heterogeneous surface features of urban villages, achieving detailed building extraction remains a significant challenge. To investigate the key difficulties impacting building extraction in urban villages, a field research was conducted. In contrast to the low-altitude perspective of drones, an attempt was made to capture the complex scenes of urban villages from ground-based viewpoints using georeferenced control points. Handheld LiDAR scanners and panoramic cameras were employed to collect ground point clouds and 360-degree street view images, as shown in Figure 16a, and these were synthesized into true-color ground point clouds. During the data collection process, unlike the previous network RTK, Ground Control Points (GCPs) with absolute coordinates were used, and the data were processed in Lidar360 software. Both airborne point clouds, collected with network RTK services, and ground-based point clouds controlled by GCPs were loaded into the software, and as shown in Figure 16b, the two datasets aligned closely with negligible horizontal and vertical offsets, validating the reliability of using airborne LiDAR point clouds as a benchmark for evaluating segmentation results.
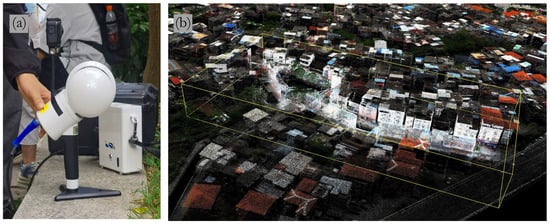
Figure 16.
Ground-based LiDAR Equipment and Point Cloud Data: (a) GreenValley LiGirp H120 handheld LiDAR scanning device; (b) Overlay of airborne and handheld point cloud data, with the highlighted point cloud in the yellow box representing the range of data captured by the ground-based LiDAR.
It was found that airborne LiDAR effectively captures data from building tops, while ground-based LiDAR provides more detailed information from oblique directions (e.g., building sides), as shown in Figure 17. However, phenomena such as tightly spaced buildings (“handshake buildings”) and narrow passageways (“line of sky”) that appear on narrow village roads (highlighted by the red rectangle in Figure 17) still pose challenges. Despite using handheld devices to enter these narrow pathways, a significant portion of the data could not be fully captured, or even when data were collected, some crucial information was lost. This is attributed to the narrow spacing between tall objects, which limits visibility. Specifically, airborne LiDAR captures data from building tops, while ground-based LiDAR captures data from the bases of buildings, which are less affected by visibility constraints. This results in data loss from the middle sections of buildings. Therefore, in very narrow village roads (and similar scenarios), obtaining complete image and point cloud data remains a challenging task. The incompleteness of the data hinders the correct recognition and analysis of such scenes. This is viewed as an unresolved challenge at present and a potential source of error in this study, which may be addressed through more refined air-ground data fusion techniques in future work.
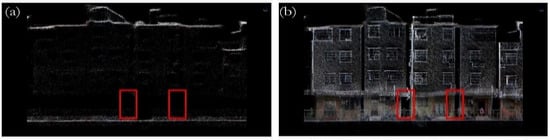
Figure 17.
Cross-sectional Views of a Same Location: (a) Airborne point cloud data slope map; (b) Handheld LiDAR point cloud data slope map, with the red box highlighting the narrow alley where data acquisition is challenging.
As a preliminary evaluation, while this study has achieved satisfactory accuracy and results, the case study presented is limited to only one scenario of urban villages. As mentioned in Section 5.1, the reliability of this equipment is anticipated to be validated under other complex operational conditions. Following this study, it is anticipated that lightweight drones will see broader applications in various fields such as photogrammetry, agriculture, and forestry—areas where drones may not have previously been used for data collection, or where larger, less portable UAV systems have been employed. At the same time, future research is expected to assess the performance of the OBIA method model proposed in this study across additional scenarios and evaluate the transferability of the method. This will rely on the collection of further datasets using novel drone technologies. Although airborne point cloud data in this study were primarily used for comparative evaluation, LiDAR, in contrast to visible light, offers the advantage of capturing three-dimensional geographic information and multiple return signals [76]. This capability makes LiDAR more suitable for extracting information in complex environments. Further miniaturization of LiDAR technology and its broader adoption in more complex and challenging environments are anticipated.
In terms of algorithm selection, the focus of this study was to evaluate novel drone-based data. This study aimed to employ well-established processing methods that have been widely applied to various remote sensing datasets, for two main reasons: first, to assess the reliability of new data using these classical methods, and second, to evaluate the applicability of these methods to novel datasets. These two objectives are considered complementary. Machine learning algorithms tend to perform effectively in single case studies because they typically require fewer training samples, are less prone to overfitting, and offer good generalization capabilities. In this study, three machine learning classifiers were selected to classify image objects. Among them, the KNN algorithm classifies each pixel based solely on its neighboring samples. It is particularly sensitive to local decision boundaries and can more effectively adapt to complex boundary characteristics when processing different types of land cover, which is why it performs well in extracting areas with high-density buildings. However, this sensitivity can lead to misclassification when dealing with land cover types that have similar spectral characteristics, such as roads, narrow alleys, and vacant land. Consequently, the classification accuracy for roads is lower than for buildings. The Bayes algorithm, a probabilistic model, shows strong stability in areas where land cover categories are clearly distinguishable. However, due to its assumption of independence, it tends to misclassify roads and vacant land in regions with overlapping spectral features. The decision tree may make incorrect classifications at certain nodes when dealing with land cover types with ambiguous boundaries. Furthermore, a deeper tree depth may lead to overfitting, and the decision tree struggles with categories that have unclear boundaries, particularly in urban village scenarios. From the perspective of classification accuracy, the machine learning algorithms selected in this study meet the classification requirements for the urban village scenario. However, the current algorithms may have limitations when sample sizes and datasets are small. Specifically, both the Bayes and Decision Tree algorithms exhibited user accuracies below 0.6. As indicated by the confusion matrix, the primary cause of this issue is the misclassification between buildings and roads. The narrow spacing between buildings in urban villages results in the occlusion of roads, and the similarity in appearance between concrete rooftops and concrete roads in visible light imagery affects road classification accuracy. Furthermore, the complex road structures in urban villages pose challenges for classification, as these roads do not have consistent widths like main roads and often lack clear boundaries. The variability of road features (e.g., varying pavement materials and widths) makes accurate classification challenging for algorithms.
As the reliability of lightweight UAV data is increasingly proven and the application of similar devices becomes more widespread, further improvements in OBIA algorithms will promote the broader adoption of the OBIA + lightweight UAV solution. It is anticipated that deep learning methods will offer significant advantages for image classification in future research. Deep learning outperforms traditional machine learning in feature representation, enabling the automatic extraction of complex image features using multi-layer neural networks. It excels at classifying multi-scale, multi-shaped, and heterogeneous regions in images. With the increasing popularity of drones and the convenience of acquiring VHSR imagery, the integration of deep reinforcement learning into remote sensing image segmentation is expected. This will minimize human intervention and enable fully automated data processing. Additionally, developing evaluation methods for segmentation accuracy across various scenarios will greatly enhance the reliability and feasibility of related research. This is likely to become a key direction for future research in image analysis and processing in drone applications.
6. Conclusions
In this study, the data reliability of lightweight foldable UAVs in complex land-cover scenarios was demonstrated. Specifically, a case study focusing on the extraction of high-density buildings in urban villages was designed. Using the DJI Mavic 3 Enterprise equipped with network RTK, DOM of the study area were collected and processed using OBIA techniques to extract urban village buildings.
The generated images clearly revealed the chaotic surface features typical of urban villages. Even small, fragmented objects, such as water heaters and canopies, were distinctly visible, providing reliable data support for practical application needs. Regarding OBIA, the contours of image objects generated by MRS closely aligned with the actual land features, and the machine learning classification algorithms achieved relatively high accuracy. These results validated the feasibility of combining lightweight UAVs with OBIA techniques.
Considering data collection, data quality, and case results, this UAV demonstrated not only high portability, simplicity in workflow, and minimal regulatory constraints but also ensured data reliability, making it well-suited for this case study. As a practical reference, this study has the potential to promote the widespread application of similar UAVs across various fields.
Author Contributions
Data acquisition, J.K. and Y.C.; data processing, J.K. and W.C.; formal analysis, J.K.; software, J.K. and X.M.; validation, X.M. and Z.L.; visualization, J.K., Z.L., and X.M.; supervision, Z.Z. and Y.C.; review and editing, Z.Z., Z.L., and Y.C.; original draft preparation, J.K.; funding acquisition, Y.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research was supported by the Major Project of Comprehensive Government Management Application and Large-scale Industrialization Demonstration Project of the High-Resolution Earth Observation System (83-Y50G24-9001-22/23); Humanities and Social Sciences Planning Fund Project of the Ministry of Education (21YJAZH009).
Data Availability Statement
The original contributions presented in the study are included in the article; further inquiries can be directed to the corresponding author.
Acknowledgments
We extend our sincere gratitude to Cheng Guo, Yongshi Zhou, Xiaohao Zheng, Junyu Chen, Xianghua Shi, Yifan Yang, and other laboratory team members for their indispensable support in this research. We also thank the faculty members at the School of Geographic Science and Remote Sensing, Guangzhou University, and the Institute of Aerospace Remote Sensing Innovations for their insightful feedback and constructive suggestions, which greatly contributed to the development of this article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Ramesh, P.S.; Jeyan, M.L. Mini Unmanned Aerial Systems (UAV)-A Review of the Parameters for Classification of a Mini UAV. Int. J. Aviat. Aeronaut. Aerosp. 2020, 7, 5. [Google Scholar] [CrossRef]
- Mohd Noor, N.; Abdullah, A.; Hashim, M. Remote Sensing UAV/Drones and Its Applications for Urban Areas: A Review. In IOP Conference Series: Earth and Environmental Science, Proceedings of the 9th IGRSM International Conference and Exhibition on Geospatial & Remote Sensing (IGRSM 2018), Kuala Lumpur, Malaysia, 24–25 April 2018; IOP Publishing Ltd.: Bristol, UK, 2018; Volume 169, p. 012003. [Google Scholar]
- Zhang, J.; Fei, L.; Jian, W. Review of the Light-Weighted and Small UAV System for Aerial Photography and Remote Sensing. Natl. Remote Sens. Bull. 2021, 25, 708–724. [Google Scholar] [CrossRef]
- Ayamga, M.; Akaba, S.; Nyaaba, A.A. Multifaceted Applicability of Drones: A Review. Technol. Forecast. Soc. Change 2021, 167, 120677. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the Unmanned Aerial Vehicles (UAVs): A Comprehensive Review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Nex, F.; Armenakis, C.; Cramer, M.; Cucci, D.A.; Gerke, M.; Honkavaara, E.; Kukko, A.; Persello, C.; Skaloud, J. UAV in the Advent of the Twenties: Where We Stand and What Is Next. ISPRS J. Photogramm. Remote Sens. 2022, 184, 215–242. [Google Scholar] [CrossRef]
- Simic Milas, A.; Cracknell, A.P.; Warner, T.A. Drones—The Third Generation Source of Remote Sensing Data. Int. J. Remote Sens. 2018, 39, 7125–7137. [Google Scholar] [CrossRef]
- Stöcker, C.; Bennett, R.; Nex, F.; Gerke, M.; Zevenbergen, J. Review of the Current State of UAV Regulations. Remote Sens. 2017, 9, 459. [Google Scholar] [CrossRef]
- Bassi, E. European Drones Regulation: Today’s Legal Challenges. In Proceedings of the 2019 International Conference on Unmanned Aircraft Systems (ICUAS), Atlanta, GA, USA, 11–14 June 2019; pp. 443–450. [Google Scholar]
- Ravich, T. A Comparative Global Analysis of Drone Laws: Best Practices and Policies. In The Future of Drone Use; Springer: Berlin/Heidelberg, Germany, 2016; pp. 301–322. [Google Scholar] [CrossRef]
- Calantropio, A.; Chiabrando, F.; Sammartano, G.; Spanò, A.; Teppati Losè, L. UAV Strategies Validation and Remote Sensing Data for Damage Assessment in Post-Disaster Scenarios. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 121–128. [Google Scholar] [CrossRef]
- Kao, D.-Y.; Chen, M.-C.; Wu, W.-Y.; Lin, J.-S.; Chen, C.-H.; Tsai, F. Drone Forensic Investigation: DJI Spark Drone as a Case Study. Procedia Comput. Sci. 2019, 159, 1890–1899. [Google Scholar] [CrossRef]
- Stanković, M.; Mirza, M.M.; Karabiyik, U. UAV Forensics: DJI Mini 2 Case Study. Drones 2021, 5, 49. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, Y.; Liao, G. Digital Forensic Research for Analyzing Drone and Mobile Device: Focusing on DJI Mavic 2 Pro. Drones 2024, 8, 281. [Google Scholar] [CrossRef]
- Elkhrachy, I. Accuracy Assessment of Low-Cost Unmanned Aerial Vehicle (UAV) Photogrammetry. Alex. Eng. J. 2021, 60, 5579–5590. [Google Scholar] [CrossRef]
- Kršák, B.; Blišťan, P.; Pauliková, A.; Puškárová, P.; Kovanič, Ľ.m.; Palková, J.; Zelizňaková, V. Use of Low-Cost UAV Photogrammetry to Analyze the Accuracy of a Digital Elevation Model in a Case Study. Measurement 2016, 91, 276–287. [Google Scholar] [CrossRef]
- Mugnai, F.; Tucci, G. A Comparative Analysis of Unmanned Aircraft Systems in Low Altitude Photogrammetric Surveys. Remote Sens. 2022, 14, 726. [Google Scholar] [CrossRef]
- Rogers, S.R.; Manning, I.; Livingstone, W. Comparing the Spatial Accuracy of Digital Surface Models from Four Unoccupied Aerial Systems: Photogrammetry Versus LiDAR. Remote Sens. 2020, 12, 2806. [Google Scholar] [CrossRef]
- Kochan, D. Placing the Urban Village: A Spatial Perspective on the Development Process of Urban Villages in Contemporary China. Int. J. Urban Reg. Res. 2015, 39, 927–947. [Google Scholar] [CrossRef]
- Zhao, Y.; An, N.; Chen, H.; Tao, W. Politics of Urban Renewal: An Anatomy of the Conflicting Discourses on the Renovation of China’s Urban Village. Cities 2021, 111, 103075. [Google Scholar] [CrossRef]
- Zhang, L.; Zhao, S.X.; Tian, J.P. Self-Help in Housing and Chengzhongcun in China’s Urbanization. Int. J. Urban Reg. Res. 2003, 27, 912–937. [Google Scholar] [CrossRef]
- Liu, Y.; He, S.; Wu, F.; Webster, C. Urban Villages Under China’s Rapid Urbanization: Unregulated Assets and Transitional Neighbourhoods. Habitat Int. 2010, 34, 135–144. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, Y.; Lin, Y.; Liao, Q.; Li, Y. UV-SAM: Adapting Segment Anything Model for Urban Village Identification. In Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 20–27 February 2024; pp. 22520–22528. [Google Scholar]
- Blaschke, T.; Hay, G.J.; Kelly, M.; Lang, S.; Hofmann, P.; Addink, E.; Feitosa, R.Q.; Van der Meer, F.; Van der Werff, H.; Van Coillie, F. Geographic Object-Based Image Analysis–Towards a New Paradigm. ISPRS J. Photogramm. Remote Sens. 2014, 87, 180–191. [Google Scholar] [CrossRef]
- Blaschke, T. Object Based Image Analysis for Remote Sensing. ISPRS J. Photogramm. Remote Sens. 2010, 65, 2–16. [Google Scholar] [CrossRef]
- Hossain, M.D.; Chen, D. Segmentation for Object-Based Image Analysis (OBIA): A Review of Algorithms and Challenges from Remote Sensing Perspective. ISPRS J. Photogramm. Remote Sens. 2019, 150, 115–134. [Google Scholar] [CrossRef]
- Blaschke, T.; Strobl, J. What’s Wrong With Pixels? Some Recent Developments Interfacing Remote Sensing and GIS. Z. Geoinformationssysteme 2001, 14, 12–17. [Google Scholar]
- Dronova, I. Object-Based Image Analysis in Wetland Research: A Review. Remote Sens. 2015, 7, 6380–6413. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhu, L. A Review on Unmanned Aerial Vehicle Remote Sensing: Platforms, Sensors, Data Processing Methods, and Applications. Drones 2023, 7, 398. [Google Scholar] [CrossRef]
- Chen, G.; Weng, Q.; Hay, G.J.; He, Y. Geographic Object-Based Image Analysis (GEOBIA): Emerging Trends and Future Opportunities. GIScience Remote Sens. 2018, 55, 159–182. [Google Scholar] [CrossRef]
- Pasaribu, R.; Aditama, F.; Setyabudi, P. Object-Based Image Analysis (OBIA) for Mapping Mangrove Using Unmanned Aerial Vehicle (UAV) on Tidung Kecil Island, Kepulauan Seribu, DKI Jakarta Province. In IOP Conference Series: Earth and Environmental Science, Proceedings of the 4th International Conference Marine Sciences (ICMS 2021), Bogor, Indonesia, 24–25 August 2021; IOP Publishing Ltd.: Bristol, UK, 2021; Volume 944, p. 012037. [Google Scholar]
- Ventura, D.; Bonifazi, A.; Gravina, M.F.; Belluscio, A.; Ardizzone, G. Mapping and Classification of Ecologically Sensitive Marine Habitats Using Unmanned Aerial Vehicle (UAV) Imagery and Object-Based Image Analysis (OBIA). Remote Sens. 2018, 10, 1331. [Google Scholar] [CrossRef]
- Souffer, I.; Sghiouar, M.; Sebari, I.; Zefri, Y.; Hajji, H.; Aniba, G. Automatic Extraction of Photovoltaic Panels from UAV Imagery with Object-Based Image Analysis and Machine Learning. In Proceedings of the 6th International Conference on Wireless Technologies, Embedded, and Intelligent Systems (WITS 2020), Fez, Morocco, 14–16 October 2020; Springer: Berlin/Heidelberg, Germany, 2022; pp. 699–709. [Google Scholar]
- Yang, K.; Zhang, H.; Wang, F.; Lai, R. Extraction of Broad-Leaved Tree Crown Based on UAV Visible Images and OBIA-RF Model: A Case Study for Chinese Olive Trees. Remote Sens. 2022, 14, 2469. [Google Scholar] [CrossRef]
- Huang, H.; Lan, Y.; Yang, A.; Zhang, Y.; Wen, S.; Deng, J. Deep Learning Versus Object-Based Image Analysis (OBIA) in Weed Mapping of UAV Imagery. Int. J. Remote Sens. 2020, 41, 3446–3479. [Google Scholar] [CrossRef]
- de Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Mapping Skips in Sugarcane Fields Using Object-Based Analysis of Unmanned Aerial Vehicle (UAV) images. Comput. Electron. Agric. 2017, 143, 49–56. [Google Scholar] [CrossRef]
- Norman, M.; Shahar, H.M.; Mohamad, Z.; Rahim, A.; Mohd, F.A.; Shafri, H.Z.M. Urban Building Detection Using Object-Based Image Analysis (OBIA) and Machine Learning (ML) Algorithms. In IOP Conference Series: Earth and Environmental Science, Proceedings of the Advanced Geospatial and Surveying Conference, Perlis, Malaysia, 7 October 2020; IOP Publishing Ltd.: Bristol, UK, 2021; Volume 620, p. 012010. [Google Scholar]
- Tsai, Y.H.; Stow, D.; Weeks, J. Comparison of Object-Based Image Analysis Approaches to Mapping New Buildings in Accra, Ghana Using Multi-Temporal QuickBird Satellite Imagery. Remote Sens. 2011, 3, 2707–2726. [Google Scholar] [CrossRef] [PubMed]
- Sadhasivam, N.; Dineshkumar, C.; Abdul Rahaman, S.; Bhardwaj, A. Object Based Automatic Detection of Urban Buildings Using UAV Images. In Proceedings of the 1st International Conference on Unmanned Aerial System in Geomatics (UASG 2019), Roorkee, India, 6–7 April 2019; Springer: Berlin/Heidelberg, Germany, 2020; pp. 265–278. [Google Scholar]
- Cheng, J.; Deng, C.; Su, Y.; An, Z.; Wang, Q. Methods and Datasets on Semantic Segmentation for Unmanned Aerial Vehicle Remote Sensing Images: A Review. ISPRS J. Photogramm. Remote Sens. 2024, 211, 1–34. [Google Scholar] [CrossRef]
- Luo, J.; Mo, B.; Lin, J. A Design of High-Precision Positioning System of UAV Based on the Qianxun Location Network. In Proceedings of the 37th Chinese Control Conference (CCC), Wuhan, China, 25–27 July 2018; pp. 4633–4637. [Google Scholar]
- Yang, D.; Qiu, H.; Hu, S.; Pei, Y.; Wang, X.; Du, C.; Long, Y.; Cao, M. Influence of Successive Landslides on Topographic Changes Revealed by Multitemporal High-Resolution UAS-Based DEM. CATENA 2021, 202, 105229. [Google Scholar] [CrossRef]
- Yongshuai, H.; Junbo, S.; Chenhao, O.; Xingning, L. Real-Time Observation Decoding and Positioning Analysis Based on Qianxun BeiDou Ground Based Augmentation System. Bull. Surv. Mapp. 2017, 9, 11. [Google Scholar] [CrossRef]
- Tan, C.; Chen, Z.; Liao, A.; Zeng, X. Accuracy Assessment of Mavic 3 Industrial UAV Based on DJI Terra and Pix4Dmapper. In Proceedings of the Fifth International Conference on Geology, Mapping, and Remote Sensing (ICGMRS 2024), Wuhan, China, 12–14 April 2024; pp. 498–504. [Google Scholar]
- Sharma, S.; Solanki, S.; Aswal, K.; Thakur, E.; Malhotra, I. Review on Application of Drone Systems in Agriculture. In Proceedings of the 2021 6th International Conference on Signal Processing, Computing and Control (ISPCC), Solan, India, 7–9 October 2021; pp. 40–45. [Google Scholar]
- Baş, N. Automated Road Extraction with Rapid Visibility During Eartquakes using LiDAR Data. In Proceedings of the 2024 IEEE Mediterranean and Middle-East Geoscience and Remote Sensing Symposium (M2GARSS), Oran, Algeria, 15–17 April 2024; pp. 6–10. [Google Scholar]
- Labib, S.; Harris, A. The Potentials of Sentinel-2 and LandSat-8 Data in Green Infrastructure Extraction, Using Object Based Image Analysis (OBIA) Method. Eur. J. Remote Sens. 2018, 51, 231–240. [Google Scholar] [CrossRef]
- Xiaoqin, W.; Miaomiao, W.; Shaoqiang, W.; Yundong, W. Extraction of Vegetation Information from Visible Unmanned Aerial Vehicle Images. Trans. Chin. Soc. Agric. Eng. 2015, 31, 152–159. [Google Scholar] [CrossRef]
- Berzéki, M.; Kozma-Bognár, V.; Berke, J. Examination of Vegetation Indices Based on Multitemporal Drone Images. Gradus 2023, 10, 1–6. [Google Scholar] [CrossRef]
- Xue, J.; Su, B. Significant Remote Sensing Vegetation Indices: A Review of Developments and Applications. J. Sens. 2017, 2017, 1353691. [Google Scholar] [CrossRef]
- Yuan, H.; Liu, Z.; Cai, Y.; Zhao, B. Research on Vegetation Information Extraction from Visible UAV Remote Sensing Images. In Proceedings of the 2018 Fifth International Workshop on Earth Observation and Remote Sensing Applications (EORSA), Xi’an, China, 18–20 June 2018; pp. 1–5. [Google Scholar]
- Balcik, F.B.; Senel, G.; Goksel, C. Greenhouse Mapping Using Object Based Classification and Sentinel-2 Satellite Imagery. In Proceedings of the 2019 8th International Conference on Agro-Geoinformatics (Agro-Geoinformatics), Istanbul, Turkey, 16–19 July 2019; pp. 1–5. [Google Scholar]
- Serbouti, I.; Raji, M.; Hakdaoui, M.; Pradhan, B.; Lee, C.-W.; Alamri, A.M. Pixel and Object-Based Machine Learning Classification Schemes for Lithological Mapping Enhancement of Semi-Arid Regions Using Sentinel-2A Imagery: A Case Study of the Southern Moroccan Meseta. IEEE Access 2021, 9, 119262–119278. [Google Scholar] [CrossRef]
- El-naggar, A.M. Determination of Optimum Segmentation Parameter Values for Extracting Building from Remote Sensing Images. Alex. Eng. J. 2018, 57, 3089–3097. [Google Scholar] [CrossRef]
- Elsebaei, M.A.E.; El-Naggar, A.M.; Abdel-maguid, R.K.; Elsebaei, M.A.; Ayaad, S.M. Identification of Optimal Segmentation Parameters for Extracting Buildings from Remote Sensing Images with Different Resolutions. Benha J. Appl. Sci. 2024, 9, 1–11. [Google Scholar] [CrossRef]
- Balcik, F.B.; Senel, G.; Goksel, C. Object-Based Classification of Greenhouses Using Sentinel-2 MSI and SPOT-7 Images: A Case Study from Anamur (Mersin), Turkey. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2020, 13, 2769–2777. [Google Scholar] [CrossRef]
- Drăguţ, L.; Csillik, O.; Eisank, C.; Tiede, D. Automated Parameterisation for Multi-Scale Image Segmentation on Multiple Layers. ISPRS J. Photogramm. Remote Sens. 2014, 88, 119–127. [Google Scholar] [CrossRef] [PubMed]
- Drǎguţ, L.; Tiede, D.; Levick, S.R. ESP: A Tool to Estimate Scale Parameter for Multiresolution Image Segmentation of Remotely Sensed Data. Int. J. Geogr. Inf. Sci. 2010, 24, 859–871. [Google Scholar] [CrossRef]
- Belgiu, M.; Csillik, O. Sentinel-2 Cropland Mapping Using Pixel-Based and Object-Based Time-Weighted Dynamic Time Warping Analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Ma, L.; Fu, T.; Blaschke, T.; Li, M.; Tiede, D.; Zhou, Z.; Ma, X.; Chen, D. Evaluation of Feature Selection Methods for Object-Based Land Cover Mapping of Unmanned Aerial Vehicle Imagery Using Random Forest and Support Vector Machine Classifiers. ISPRS Int. J. Geo Inf. 2017, 6, 51. [Google Scholar] [CrossRef]
- Ding, H.; Na, J.; Jiang, S.; Zhu, J.; Liu, K.; Fu, Y.; Li, F. Evaluation of Three Different Machine Learning Methods for Object-Based Artificial Terrace Mapping—A Case Study of the Loess Plateau, China. Remote Sens. 2021, 13, 1021. [Google Scholar] [CrossRef]
- Guo, G.; Wang, H.; Bell, D.; Bi, Y.; Greer, K. KNN Model-Based Approach in Classification. In On The Move to Meaningful Internet Systems 2003: CoopIS, DOA, and ODBASE, Proceedings of the OTM Confederated International Conferences CoopIS, DOA, and ODBASE 2003, Catania, Italy, 3–7 November 2003; Springer: Berlin/Heidelberg, Germany, 2003; pp. 986–996. [Google Scholar]
- Ruiz, P.; Mateos, J.; Camps-Valls, G.; Molina, R.; Katsaggelos, A.K. Bayesian Active Remote Sensing Image Classification. IEEE Trans. Geosci. Remote Sens. 2013, 52, 2186–2196. [Google Scholar] [CrossRef]
- Friedl, M.A.; Brodley, C.E. Decision Tree Classification of Land Cover from Remotely Sensed Data. Remote Sens. Environ. 1997, 61, 399–409. [Google Scholar] [CrossRef]
- Shelare, S.; Belkhode, P.; Nikam, K.C.; Yelamasetti, B.; Gajbhiye, T. A Payload Based Detail Study on Design and Simulation of Hexacopter Drone. Int. J. Interact. Des. Manuf. (IJIDeM) 2023, 18, 2675–2692. [Google Scholar] [CrossRef]
- Cramer, M.; Przybilla, H.-J.; Zurhorst, A. UAV Cameras: Overview and Geometric Calibration Benchmark. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 85–92. [Google Scholar] [CrossRef]
- Merkert, R.; Bushell, J. Managing the Drone Revolution: A Systematic Literature Review into the Current Use of Airborne Drones and Future Strategic Directions for Their Effective Control. J. Air Transp. Manag. 2020, 89, 101929. [Google Scholar] [CrossRef] [PubMed]
- Chmielewski, S.; Bochniak, A.; Natapov, A.; Wężyk, P. Introducing GEOBIA to Landscape Imageability Assessment: A Multi-Temporal Case Study of the Nature Reserve “Kozki”, Poland. Remote Sens. 2020, 12, 2792. [Google Scholar] [CrossRef]
- Ma, L.; Li, M.; Ma, X.; Cheng, L.; Du, P.; Liu, Y. A Review of Supervised Object-Based Land-Cover Image Classification. ISPRS J. Photogramm. Remote Sens. 2017, 130, 277–293. [Google Scholar] [CrossRef]
- Hossain, M.D.; Chen, D. A Hybrid Image Segmentation Method for Building Extraction from High-Resolution RGB Images. ISPRS J. Photogramm. Remote Sens. 2022, 192, 299–314. [Google Scholar] [CrossRef]
- Cai, L.; Shi, W.; Miao, Z.; Hao, M. Accuracy Assessment Measures for Object Extraction from Remote Sensing Images. Remote Sens. 2018, 10, 303. [Google Scholar] [CrossRef]
- Ikokou, G.B.; Smit, J. A Technique for Optimal Selection of Segmentation Scale Parameters for Object-Oriented Classification of Urban Scenes. S. Afr. J. Geomat. 2013, 2, 358–369. [Google Scholar]
- Radoux, J.; Bogaert, P. Accounting for the Area of Polygon Sampling Units for the Prediction of Primary Accuracy Assessment Indices. Remote Sens. Environ. 2014, 142, 9–19. [Google Scholar] [CrossRef]
- Whiteside, T.G.; Maier, S.W.; Boggs, G.S. Area-Based and Location-Based Validation of Classified Image Objects. Int. J. Appl. Earth Obs. Geoinf. 2014, 28, 117–130. [Google Scholar] [CrossRef]
- Zhang, H.; Fritts, J.E.; Goldman, S.A. Image Segmentation Evaluation: A Survey of Unsupervised Methods. Comput. Vis. Image Underst. 2008, 110, 260–280. [Google Scholar] [CrossRef]
- Lohani, B.; Ghosh, S. Airborne LiDAR technology: A Review of Data Collection and Processing Systems. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 567–579. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).