
Improved Nonlinear Model Predictive Control Based Fast Trajectory Tracking for a Quadrotor Unmanned Aerial Vehicle

Abstract
1. Introduction
- (1)
- Considering the actual quadrotor model, we propose an improved NMPC control scheme to achieve more precise and rapid position tracking. This improvement aims to enhance the generality and applicability control.
- (2)
- Compared with mC/GMRES in [28], this study enhances control stability and computational efficiency in NMPC by incorporating a weighted sum of control increments into the cost function to solve the new optimization problem.
- (3)
- The Lyapunov-based shrinkage constraints are added according to the optimal solution, and the set of two stabilization domains is found to ensure numerical convergence and trajectory stability throughout the entire simulation process.
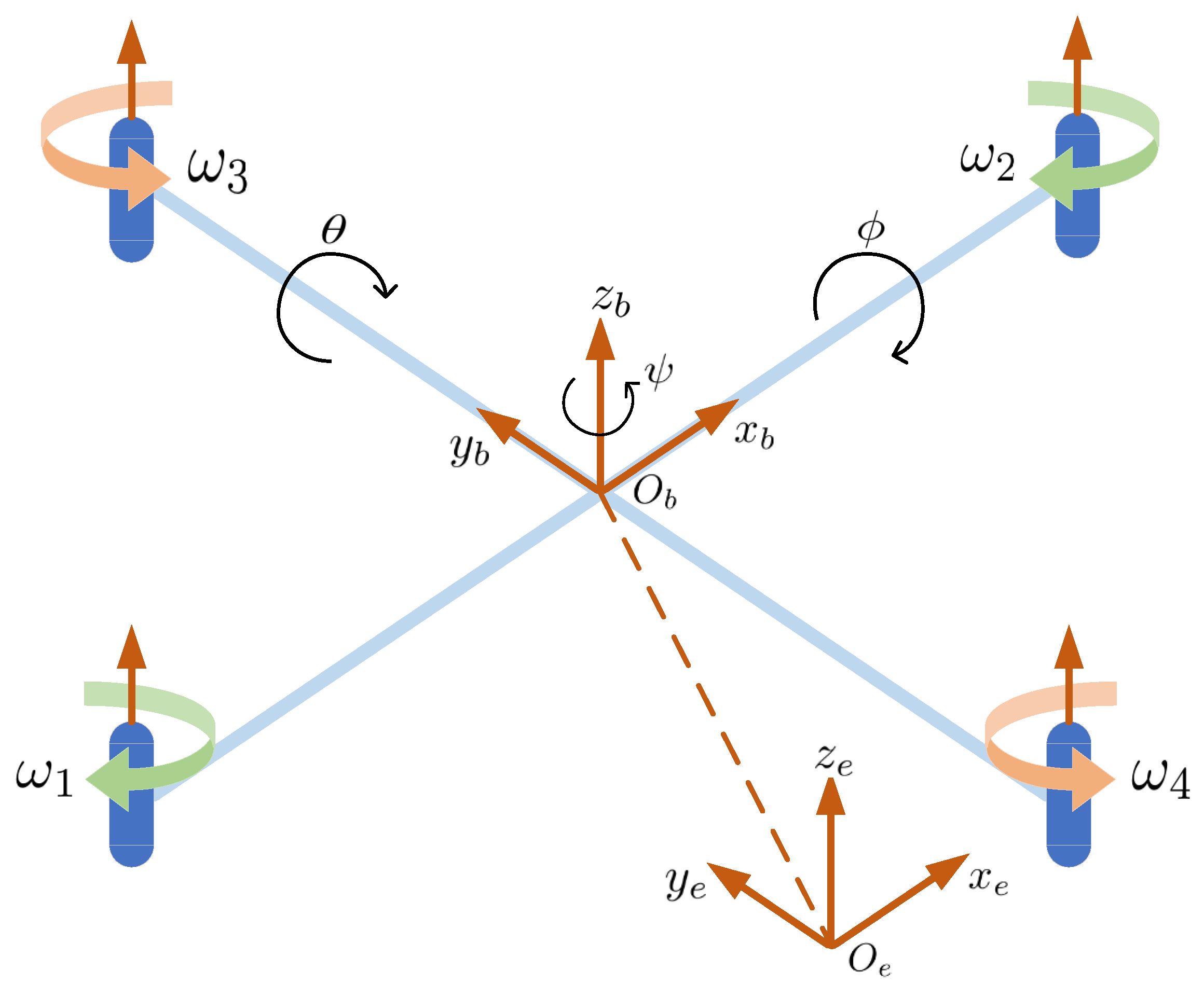
2. System Description
3. Trajectory Tracking Controller Design
3.1. Brief Description of NMPC Controller
3.2. Improved Efficient NMPC
3.2.1. Smoothness Constraint Term for Control Increments
3.2.2. C/GMRES Algorithm
| Algorithm 1: FDGMRES algorithm for |
| 1. Initialize , , , ; |
| 2. Get by ; |
| 3. Get from (14) and partial derivative ; |
| 4. , , ; |
| 5. while do |
| 6. get and ; |
| 7. ; |
| 8. For |
| 9. ; |
| 10. ; |
| 11. End for |
| 12. ; ; ; |
| 13. ; ; ; |
| 14. If |
| 15. break; |
| 16. End if |
| 17. End While |
| 18. ; |
| 19. , . |
3.2.3. Adding Stability Constraints
3.2.4. Lyapunov-Based Auxiliary Control Law Design
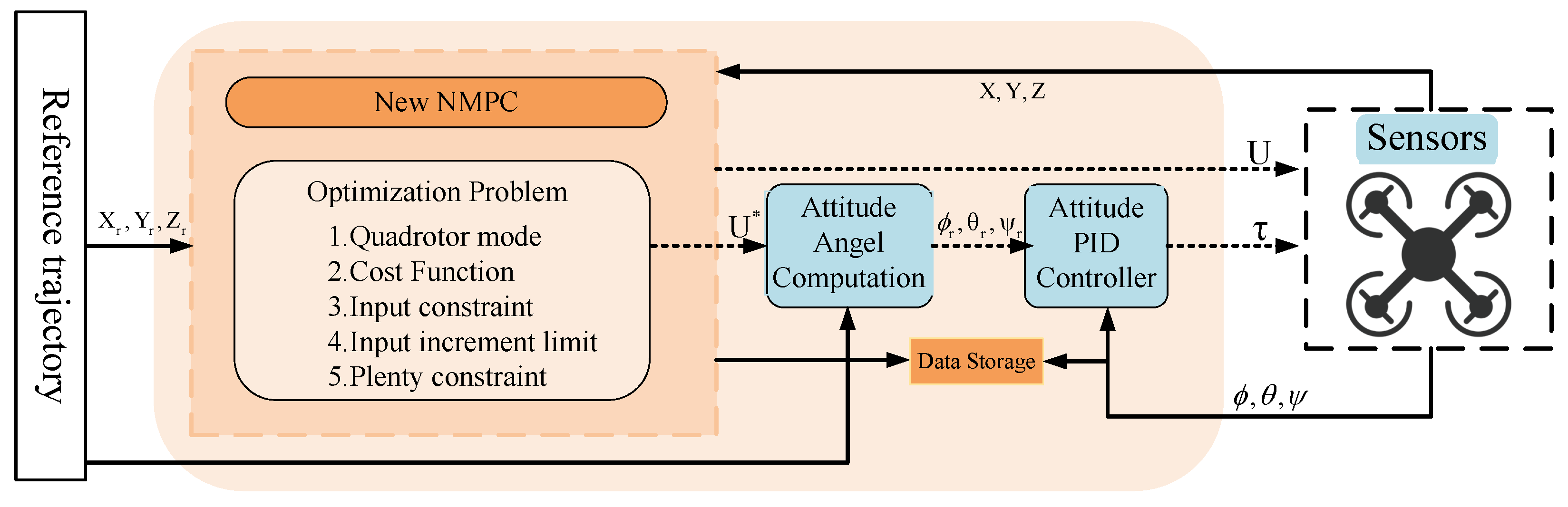
3.3. Algorithm Structure
| Algorithm 2: Efficient-NMPC algorithm for UAV trajectory |
| 1. Initialize , , , , , , ; |
| 2. While do |
| 3. ; find by ; |
| 4. End while; |
| 5. While do |
| 6. and ; |
| 7. ; |
| 8. |
| 9. If |
| 10. ; Else ; |
| 11. End If |
| 12. Decoupling angel , ; |
| 13. Attitude controller ; |
| 14. End While |
4. Simulation
4.1. Parameter Selection
4.2. Total Trajectory Simulation
4.3. Improved NMPC Tracking Trajectory Performance and Efficiency Comparison
4.4. Performance under Wind Disturbance
4.5. Attitude Trajectory and Error Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
Appendix A.1
Appendix A.2
Appendix A.3
References
- Zuo, Z. Trajectory tracking control design with command-filtered compensation for a quadrotor. IET Control Theory Appl. 2010, 4, 2343–2355. [Google Scholar] [CrossRef]
- Cho, S.W.; Park, H.J.; Lee, H.; Shim, D.H.; Kim, S.Y. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations. Comput. Ind. Eng. 2021, 161, 107612. [Google Scholar] [CrossRef]
- Shao, X.; Liu, J.; Cao, H.; Shen, C.; Wang, H. Robust dynamic surface trajectory tracking control for a quadrotor UAV via extended state observer. Int. J. Robust Nonlinear Control 2018, 28, 2700–2719. [Google Scholar] [CrossRef]
- Chen, T.; Shan, J. A novel cable-suspended quadrotor transportation system: From theory to experiment. Aerosp. Sci. Technol. 2020, 104, 105974. [Google Scholar] [CrossRef]
- He, Y.; Zhang, S. Trajectory tracking control for quad-rotor system in the presence of velocity constraint. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420931682. [Google Scholar] [CrossRef]
- Gao, p.; Liu, y.; Zhang, H.; Wang, l. Quadrotor helicopter Attitude Control using cascade PID. In Proceedings of the 28th Chinese Control and Decision Conference, CCDC 2016, Yinchuan, China, 28–30 May 2016; pp. 5158–5163. [Google Scholar]
- Li, C.; Jing, H.; Bao, J.; Sun, S.; Wang, R. Robust H∞ fault tolerant control for quadrotor attitude regulation. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2018, 232, 1302–1313. [Google Scholar] [CrossRef]
- Rekabi, F.; Shirazi, F.A.; Sadigh, M.J.; Saadat, M. Nonlinear H∞ Measurement Feedback Control Algorithm for Quadrotor Position Tracking. J. Frankl. Inst. 2020, 357, 6777–6804. [Google Scholar] [CrossRef]
- Li, B.; Liu, H.; Ahn, C.K.; Wang, C.; Zhu, X. Fixed-Time Tracking Control of Wheel Mobile Robot in Slipping and Skidding Conditions. IEEE/ASME Trans. Mechatron. 2024, 1–11. [Google Scholar] [CrossRef]
- Li, B.; Hu, Q.; Yang, Y. Continuous finite-time extended state observer based fault tolerant control for attitude stabilization. Aerosp. Sci. Technol. 2019, 84, 204–213. [Google Scholar] [CrossRef]
- Li, B.; Gong, W.; Yang, Y.; Xiao, B.; Ran, D. Appointed Fixed Time Observer-Based Sliding Mode Control for a Quadrotor UAV Under External Disturbances. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 290–303. [Google Scholar] [CrossRef]
- Huang, Y.; Zhu, M.; Zheng, Z.; Feroskhan, M. Fixed-time autonomous shipboard landing control of a helicopter with external disturbances. Aerosp. Sci. Technol. 2019, 84, 18–30. [Google Scholar] [CrossRef]
- Li, B.; Liu, H.; Ahn, C.K.; Gong, W. Optimized intelligent tracking control for a quadrotor unmanned aerial vehicle with actuator failures. Aerosp. Sci. Technol. 2024, 144, 108803. [Google Scholar] [CrossRef]
- Hanover, D.; Foehn, P.; Sun, S.; Kaufmann, E.; Scaramuzza, D. Performance, Precision, and Payloads: Adaptive Nonlinear MPC for Quadrotors. IEEE Rob. Autom. Lett. 2022, 7, 690–697. [Google Scholar] [CrossRef]
- Zheng, R.; Lyu, Y. Nonlinear tight formation control of multiple UAVs based on model predictive control. Def. Technol. 2023, 25, 69–75. [Google Scholar] [CrossRef]
- Xu, Z.; Fan, L.; Qiu, W.; Wen, G.; He, Y. A Robust Disturbance-Rejection Controller Using Model Predictive Control for Quadrotor UAV in Tracking Aggressive Trajectory. Drones 2023, 7, 557. [Google Scholar] [CrossRef]
- Yi, F.; Zhang, C.; Rawashdeh, S.; Baek, S. Autonomous Landing of a UAV on a Moving Platform Using Model Predictive Control. Drones 2018, 2, 34. [Google Scholar] [CrossRef]
- Wei, H.; Shen, C.; Shi, Y. Distributed Lyapunov-Based Model Predictive Formation Tracking Control for Autonomous Underwater Vehicles Subject to Disturbances. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 5198–5208. [Google Scholar] [CrossRef]
- Mohammadi, A.; Feng, Y.; Zhang, C.; Rawashdeh, S.; Baek, S. Vision-Based Autonomous Landing Using an MPC-Controlled Micro UAV on a Moving Platform. In Proceedings of the 2020 International Conference on Unmanned Aircraft Systems, ICUAS 2020, Athens, Greece, 1–4 September 2020; pp. 771–780. [Google Scholar]
- Vlantis, P.; Marantos, P.; Bechlioulis, C.P.; Kyriakopoulos, K.J. Quadrotor landing on an inclined platform of a moving ground vehicle. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2202–2207. [Google Scholar]
- Outeiro, P.; Cardeira, C.; Oliveira, P. Multiple-model adaptive control architecture for a quadrotor with constant unknown mass and inertia. Aerosp. Sci. Technol. 2021, 117, 106899. [Google Scholar] [CrossRef]
- Yan, D.; Zhang, W.; Chen, H.; Shi, J. Robust control strategy for multi-UAVs system using MPC combined with Kalman-consensus filter and disturbance observer. Isa Trans. 2023, 135, 35–51. [Google Scholar] [CrossRef]
- Zhang, K.; Liu, C.; Shi, Y. Self-triggered adaptive model predictive control of constrained nonlinear systems: A min-max approach. Automatica 2022, 142, 110424. [Google Scholar] [CrossRef]
- Cengiz, S.K.; Ucun, L. Optimal controller design for autonomous quadrotor landing on moving platform. Simul. Model. Pract. Theory 2022, 119, 102565. [Google Scholar] [CrossRef]
- Wu, X.; Xiao, B.; Wu, C.; Guo, Y. Centroidal voronoi tessellation and model predictive control–based macro-micro trajectory optimization of microsatellite swarm. Space Sci. Technol. 2022, 2022, 9802195. [Google Scholar] [CrossRef]
- Boyd, S.; Vandenberghe, L. Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Ohtsuka, T. A tutorial on C/GMRES and automatic code generation for nonlinear model predictive control. In Proceedings of the 2015 European Control Conference, ECC 2015, Linz, Austria, 15–17 July 2015; pp. 73–86. [Google Scholar]
- Shen, C.; Buckham, B.; Shi, Y. Modified C/GMRES Algorithm for Fast Nonlinear Model Predictive Tracking Control of AUVs. IEEE Trans. Control Syst. Technol. 2017, 25, 1896–1904. [Google Scholar] [CrossRef]
- Wang, D.; Pan, Q.; Shi, Y.; Hu, J.; Records, C.Z. Efficient Nonlinear Model Predictive Control for Quadrotor Trajectory Tracking: Algorithms and Experiment. IEEE Trans. Cybern. 2021, 51, 5057–5068. [Google Scholar] [CrossRef]
- Singh, B.K.; Kumar, A. Model predictive control using LPV approach for trajectory tracking of quadrotor UAV with external disturbances. Aircaft Eng. Aerosp. Technol. 2023, 95, 607–618. [Google Scholar] [CrossRef]
- Giorgi, G.; Jimenez, B.; Novo, V. Approximate Karush-Kuhn-Tucker Condition in Multiobjective Optimization. J. Optim. Theory Appl. 2016, 171, 70–89. [Google Scholar] [CrossRef]
- Lasdon, L.; Waren, A.; Rice, R. An interior penalty method for inequality constrained optimal control problems. IEEE Trans. Autom. 1967, 12, 388–395. [Google Scholar] [CrossRef]
- Khalil, K.H. Nonlinear Systems; Prentice-Hall: Hoboken, NJ, USA, 2002. [Google Scholar]
- Christofides, P.D.; Jinfeng, L.; de la Peña, D.M. Networked and Distributed Predictive Control: Methods and Nonlinear Process Network Applications; Advances in Industrial Control; Springer: London, UK, 2011. [Google Scholar] [CrossRef]
- Munoz de la Pena, D.; Christofides, P.D. Lyapunov-Based Model Predictive Control of Nonlinear Systems Subject to Data Losses. IEEE Trans. Automat. Control 2008, 53, 2076–2089. [Google Scholar] [CrossRef]
- Shen, C.; Shi, Y. Distributed implementation of nonlinear model predictive control for AUV trajectory tracking. Automatica 2020, 115, 108863. [Google Scholar] [CrossRef]
- Shen, C.; Shi, Y.; Buckham, B. Lyapunov-based model predictive control for dynamic positioning of autonomous underwater vehicles. In Proceedings of the 2017 IEEE International Conference on Unmanned Systems, ICUS 2017, Beijing, China, 27–29 October 2017; pp. 588–593. [Google Scholar]
- Ba, D.; Li, Y.X.; Tong, S. Fixed-time adaptive neural tracking control for a class of uncertain nonstrict nonlinear systems. Neurocomputing 2019, 363, 273–280. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear Feedback Design for Fixed-Time Stabilization of Linear Control Systems. IEEE Trans. Autom. 2012, 57, 2106–2110. [Google Scholar] [CrossRef]
- Li, B.; Zhang, H.; Xiao, B.; Wang, C.; Yang, Y. Fixed-time integral sliding mode control of a high-order nonlinear system. Nonlinear Dyn. 2022, 107, 909–920. [Google Scholar] [CrossRef]
- Song, T.; Fang, L.; Wang, H. Model-free finite-time terminal sliding mode control with a novel adaptive sliding mode observer of uncertain robot systems. Asian J. Control 2022, 24, 1437–1451. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Numerical Algorithm | Prediction Horizon | Average Time (s) |
|---|---|---|
| Improved NMPC | N = 5 | 0.0012 |
| N = 10 | 0.0041 | |
| N = 15 | 0.0065 | |
| Hamiltonian-based NMPC | N = 5 | 0.15 |
| N = 10 | 0.19 | |
| N = 15 | 1.28 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, H.; Gao, Y.; Yang, Y.; Xu, S. Improved Nonlinear Model Predictive Control Based Fast Trajectory Tracking for a Quadrotor Unmanned Aerial Vehicle. Drones 2024, 8, 387. https://doi.org/10.3390/drones8080387
Ma H, Gao Y, Yang Y, Xu S. Improved Nonlinear Model Predictive Control Based Fast Trajectory Tracking for a Quadrotor Unmanned Aerial Vehicle. Drones. 2024; 8(8):387. https://doi.org/10.3390/drones8080387
Chicago/Turabian StyleMa, Hongyue, Yufeng Gao, Yongsheng Yang, and Shoulin Xu. 2024. "Improved Nonlinear Model Predictive Control Based Fast Trajectory Tracking for a Quadrotor Unmanned Aerial Vehicle" Drones 8, no. 8: 387. https://doi.org/10.3390/drones8080387
APA StyleMa, H., Gao, Y., Yang, Y., & Xu, S. (2024). Improved Nonlinear Model Predictive Control Based Fast Trajectory Tracking for a Quadrotor Unmanned Aerial Vehicle. Drones, 8(8), 387. https://doi.org/10.3390/drones8080387